音の到来方向と音源の分布幅を考慮したラウドネス に関する研究
山内, 源太
http://hdl.handle.net/2324/2236250
出版情報:九州大学, 2018, 博士(芸術工学), 課程博士 バージョン:
権利関係:
山内 源太
YAMAUCHI Genta
2019 年 3 月
目次
第1章 序論 5
1.1
本研究の背景. . . . 5
1.2
既往の研究. . . . 7
1.3
本研究の目的と本論文の構成. . . . 9
第2章 頭部伝達関数の測定 13
2.1
頭部伝達関数について. . . . 13
2.2
測定構成. . . . 15
2.3
測定条件. . . . 18
2.4
測定結果. . . . 19
2.4.1
インパルス応答. . . . 19
2.4.2
頭部伝達関数. . . . 30
2.5
本章のまとめ. . . . 38
第3章 単一音源を対象としたラウドネスの評価 39
3.1
音の到来方向を考慮したラウドネスの計算方法. . . . 39
3.1.1
従来の計算方法. . . . 40
3.1.2
音の到来方向を考慮した計算方法. . . . 41
3.2
ダミーヘッドを用いた測定. . . . 42
3.2.1
測定構成. . . . 42
3.2.2
音源. . . . 44
3.2.3
測定結果. . . . 44
3.2.4
考察. . . . 65
3.3
主観評価実験. . . . 66
3.3.1
実験構成. . . . 66
3.3.2
実験条件. . . . 68
第4章 分布する音源を対象としたラウドネスの評価 79
4.1
ダミーヘッドを用いた測定. . . . 79
4.1.1
測定構成. . . . 79
4.1.2
測定条件. . . . 82
4.1.3
測定結果. . . . 84
4.1.4
考察. . . . 99
4.2
主観評価実験. . . . 104
4.2.1
実験構成. . . . 104
4.2.2
実験条件. . . . 106
4.2.3
実験結果. . . . 111
4.3
本章のまとめ. . . . 127
第5章 音の到来方向と音源の分布幅を考慮したラウドネスの変化量 129
5.1
計算方法. . . . 129
5.2
音の到来方向と音源の分布幅を考慮したラウドネスの変化量. . . . 132
5.2.1
単一音源. . . . 132
5.2.2
分布する音源. . . . 137
5.2.3
先行研究との比較. . . . 167
5.3
変化量の適用例. . . . 169
5.4
考察. . . . 171
5.5
本章のまとめ. . . . 173
第6章 音の到来方向を考慮したラウドネス変化量の適用に向けた基礎検討 175
6.1
音の到来方向の推定方法. . . . 175
6.1.1
時間差に基づく音の到来方向の推定. . . . 176
6.1.2
遅延和アレーによる音の到来方向の推定. . . . 177
6.2
自動車走行音を対象とした音の到来方向の推定とラウドネス補正. . . . 179
6.2.1
測定対象と測定構成. . . . 179
6.2.2
音源. . . . 181
6.2.3
分析方法. . . . 182
6.3
掃除機運転音を対象とした音の到来方向の推定とラウドネス補正. . . . 186
6.3.1
測定対象. . . . 186
6.3.2
測定構成. . . . 187
6.3.3
測定条件. . . . 189
6.3.4
運転音の測定結果. . . . 190
6.3.5
音圧レベル分布とラウドネス補正. . . . 194
6.4
本章のまとめ. . . . 201
第7章 総括 203
7.1
研究のまとめ. . . . 203
7.2
今後の課題. . . . 206
使用機材 207
参考文献 211
関連論文・口頭発表 215
謝辞 216
第 1 章
序論
1.1 本研究の背景
個々の製品において
,
その製品の主性能が確実に発揮されるために様々な設計が行われる。例 えば,
製品の使用環境を十分考慮した強度設計や熱設計,
ユーザの立場に立った重量設計や使用感 や省エネルギ設計,
製品の製作側の立場に立った製作性やコスト設計などが挙げられる。こうし た製品の設計には,
音響設計も含まれる。音響設計に関しては,
静音と音質の2
つの側面が存在す る。静音(
低騒音化)
は製品の音響設計として初めに取り組まれる項目であり,
一般にA
特性音圧 レベル(
騒音レベル)
という物理指標で評価される。一方,
音質は主に自動車や家電などの製品に 対して積極的に取り組まれている項目であり,
ラウドネスやシャープネスなどといった主観指標や
SD(Semantic Differential)
法などによる主観実験で評価される。本研究では,
いくつか提案されている主観指標のうち
, A
特性音圧レベルとの対応が比較的良いとされるラウドネスを対象と する。ラウドネスとは
,
ある音の感覚的な大きさを表す心理尺度であり,
音の強さに関する聴感上の属 性と定義されている[1]
。音の大きさは主として音の強さに依存するが,
音の周波数,
波形,
およ び継続時間にも依存する。また,
ラウドネスは音圧レベル40 dB
の1 kHz
純音の音の大きさを1 sone(
ソーン)
と定義される。1 kHz
純音のとき,
ラウドネス(
音の大きさ)S
は,
音の強さIおよ び音圧レベルLと次式の関係がある[2]
。S
=
kI0.3=
k′ (10
L/10 )0.3(1.1.1)
ここに,
kおよびk′は音圧レベル40 dB
のとき1 sone
とするための比例定数である。Eq. (1.1.1)
より
, 1 kHz
純音の場合,
音圧レベルが10 dB
高くなるとラウドネス,
つまり音の大きさは約2
倍となる。他の周波数もほぼ同じような傾向を示すが
,
低周波数になると音圧レベルとラウドネスの 関係が2
倍以上となる。例えば, 20 Hz
付近では音圧レベルが10 dB
高くなるとラウドネスは約4
倍となる。また, Eq. (1.1.1)
のべき指数0.3
は周波数によって変化し, 1 kHz
から大きく離れたラウドネスを求めるための基礎研究は
, 55
年以上前にStevens
やZwicker
らにより行われ た[3–6]
。彼らの研究成果により,
ラウドネス(
ラウドネスレベル)
の計算方法がISO 532:1975 [7]
として規格化され
,
後にZwicker
の方法がISO 532-1:2017 [8]
として改めて規格化された。Zwicker
の方法は,
聴覚フィルタ特性に近似した臨界帯域モデルを用いて対象とする複合音を周波数分析
(1/3
オクターブバンド中心周波数分析)
して臨界帯域ごとのラウドネス(Specific
loudness)
を求め,
これを周波数全範囲にわたり加算することで,
複合音のラウドネス(Total
loudness)
を求める方法である。この方法は,
最初に規格化された1975
年から40
年以上経過した現在でも
,
ラウドネス(
ラウドネスレベル)
の計算方法として市販の音質評価ソフトなどに広く適 用されている。本研究においても, Zwicker
の方法により計算されるラウドネスを用いる。ISO 532-1:2017(
旧規格のISO 532:1975
を含む)
に記載のZwicker
の方法は,
外部からの音の 刺激によって聴覚系内部で励起される周波数応答の精度を高めるために,
頭部や外耳などによる伝 達特性の影響が考慮されている[9]
。しかし,
当該規格によりラウドネスを求めるための音は,
一 般に全指向性が仮定されるマイクロホン1
点で取得された音であり,
両耳で聴取するときのラウド ネスを求めるものではない。そのため,
このマイクロホンで測定された音,
および当該規格で計算 されるラウドネスには,
音源の位置,
つまり音の到来方向の影響は含まれていない。人は音を知覚 するとき頭部や耳介などにより左右の耳に届く信号に時間差やレベル差が生じる。この差を特に,
両耳間時間差(Interaural Time Differece; ITD)
や両耳間音圧差(Interaural Level Difference;
ILD)
という。これらの差により,
人は音の到来方向を推定することができる。例えば側方から音 が到来する場合,
到来方向側(
表側)
の耳に到達する音は到来方向と反対側(
裏側)
の耳と比べて早 く到達する。また,
裏側の耳へ到達する音の強さは頭部や耳介などによる反射や回折の影響で表側 の耳へ到達する音の強さと比べて弱くなる。そのため,
人が知覚する音の大きさ(
ラウドネス)
は 音の到来方向の影響を受けると考えられる。そこで
,
音の到来方向によって変化する音の大きさ(
ラウドネス)
に関する研究がいくつか行わ れている。音の到来方向による影響については,
前述したように音の強さや周波数にも依存すると 考えられる。しかし,
ある方向から到来する音のラウドネスは別の方向から到来する音のラウドネ スと比べてどの程度の違いがあるのかといった,
音の到来方向とその定量的な影響度(
ラウドネス レベルや音圧レベルの変化量)
に関する詳細な研究例は非常に少ない。また
,
我々は日常生活において鉄道車両やエレベータといった製品の内部空間に滞在することが ある。こうした製品の内部空間には,
多数の音源が広く分布していると考えられる。例えば鉄道車, ( )
と考えられる。しかし
,
分布音源の大きさや位置によるラウドネスの定量的な影響度に関する研究 は,
前述した音の到来方向と同様に詳細な研究例は見られない。1.2 既往の研究
ラウドネス研究の歴史について述べる。
Table 1.2.1
は,
本論文に関わるラウドネスの研究に 関する主要な論文や規格を年代別に示した表である。1930
年代にFletcher
らによる純音ラウ ドネスの測定結果[11]
が報告されて以降,
ラウドネスの研究が活発に行われた。1950
年代にはRobinson
らによる純音ラウドネスの再測定結果[12]
が報告され,
その後ISO 226:1987 [13]
に等 ラウドネスレベル曲線として規格化された(ISO 226:1987
は2003
年にISO 226:2003 [14]
として 改定された)
。また,
ラウドネス(
ラウドネスレベル)
の計算方法に関する初期の研究は, 1960
年代 に報告されたStevens [3, 4]
とZwicker [5, 6]
らによる研究が挙げられる。彼らの研究成果により,
ラウドネスレベルの計算方法が1975
年にISO 532:1975 [7]
として規格化され, Stevens
の方法は 同規格の方法A, Zwicker
の方法は同規格の方法B
として明記された。このうち, Zwicker
の方法 は市販の音質評価ソフトに広く適用され, ISO 532:1975
の改定版であるISO 532-1:2017 [8]
にお いても再規格化された。Zwicker
の方法は,
チャートを用いてラウドネスおよびラウドネスレベル が計算されるが,
このチャートを用いずに計算により算出可能なプログラムも公開されている(
旧 規格では[15]
に,
現規格ではAnnex A
に明記されている)
。またMoore
らは,
音が鼓膜に伝達し てから音を知覚するまでの各プロセスにおける聴覚伝達系をモデル化し,
ラウドネス(
等ラウドネ スレベル)
の推定モデルを提案している[16, 17]
。これはMoore-Glasberg
のラウドネスモデルと 呼ばれ,
等ラウドネスレベル曲線の規格(ISO 226:2003)
向けに改良されたものが米国音響学会で 規格化[18]
された後,
前述のZwicker
の方法(ISO532-1:2017)
と同時期に, ISO 532-2:2017 [19]
として規格化された。なお
, ISO 532-1:2017
の序文には,
「ISO 532-1:2017
とISO 532-2:2017
の 両規格に記載のラウドネスの計算方法は互いに異なる方法であり,
よって各方法で得られるラウド ネスは相違する」と記載されている。また,
両方法はユーザが状況に応じて使い分けると記載され ているが,
どのような状況の場合にどちらの計算方法を使用すべきか,
またどちらの計算方法がよ り正確なラウドネスを与えるかといったことは明記されていない。さて
,
本研究で対象とする音の到来方向とラウドネスに関する最も初期の研究は, 1960
年代にRobinson
らにより行われた。彼らは,
被検者の周囲に30
度間隔で設けた全12
台のスピーカを備えた装置を用いて
,
音の到来方向によってラウドネスが変化することを実験的に検証した[20]
。な お,
この研究ではラウドネスの変化に関する結果の他に,
外耳道入口で観測された音圧レベルを頭
1950s Re-determination of equal-loudness relations for pure tones / D. W. Robinson and R. S. Dadson [12]
1960s Procedure for calclationg loudness / S. S. Stevens [3, 4]
Subdivision of audible frequency range into critical bands, and procedure for calclationg loudness/ E. Zwicker [5, 6]
Loudness of directional sound fields / D. W. Robinson [20]
1970s Standardization of methods for calculating loudness level / ISO 532:1975 [7]
1980s Standardization of normal equal-loudenss-level contours / ISO 226:1987 [13]
1990s Prediction of loudness / B. C. J. Moore and B. R. Glasberg [16, 17]
2000s Standardization revision of normal equal-loudenss-level contours / ISO 226:2003 [14]
Standardization of method for calculating loudness
using Moore-Glasberg method / ANSI/ASA S3.4-2007 [18]
Binaulal loudness of directional sound fields / V. P. Sivonen [23, 24]
2010s Standadization revision of methods for calculating loudness / ISO 532-1:2017 [8] and ISO 532-2:2017 [19]
部中心の音圧レベルで基準化し
,
音の到来方向と音圧レベルの変化についても考察している。こ れは,
頭部伝達関数(Head-Related Transfer Function; HRTF)
の算出式そのものであり, HRTF
に関する初期研究として非常に有意義な研究成果である。この研究以降は,
両耳(
バイノーラル)
で取得される応答によるラウドネス推定に関する研究がいくつか確認されるが[21, 22], 1980
年代 以降は音の到来方向とラウドネスに関する研究報告はあまり見られなくなった。しかし2000
年代 に入り,
再び音の到来方向とラウドネスに関する研究報告が確認されるようになった。Sivonen
ら は,
音の到来方向の影響を受ける両耳で取得される応答を単一(
モノラル)
の応答に合成させるこ とによるラウドネスの推定式に含まれる定数について,
主観との対応が良好な定数を実験的に導出した
[23, 24]
。また, Sivonen
らは狭帯域雑音の方が広帯域雑音と比べて音の到来方向に対するラウドネスの感度が高いことを主観評価実験により確認している
[25]
。以上に示した音の到来方向によるラウドネスの変化に関する研究は
,
音の到来方向が明確な自由, 1960 Robinson [26],
これは音場の違いによる等ラウドネスレベル曲線の変化を確認することが目的であった。音場と 音の到来方向に着目した研究はいくつか確認でき[25, 27],
拡散性の高い音場におけるラウドネス は拡散性の低い音場におけるラウドネスと比べて音の到来方向に対する変化が小さいことが報告 されている。また
,
ラウドネスはEq. (1.1.1)
に示したように音の強さ(
エネルギ)
と関係がある。音の到来方 向によって人の耳(
外耳道入口や鼓膜)
に到達するエネルギの変化については, HRTF
で評価でき る。このHRTF
を利用した音の到来方向とラウドネスの変化に関する研究も見られる。Zacharov
らは
,
被検者のHRTF
を測定し,
このHRTF
とMoore
のラウドネスモデルを用いて音の到来方向によるラウドネスの変化を予測している
[28]
。Sivonen
らは,
音の到来方向に対するラウドネス の変化量を被検者のHRTF
で基準化することにより,
変化量に対する被検者間のばらつきの低減 を試みている[29]
。以上の研究報告は
,
音の到来方向によるラウドネスの変化の検証を目的としたものである。こ のようなラウドネスの変化をサービスへ応用しようとする動きが,
デジタルテレビ放送(
日本では2011
年にアナログ方式から完全移行)
において設けられたラウドネスによる運用基準などで確認 される[30]
。この運用基準では,
デジタルテレビ放送における音量のばらつきを低減するため,
ラ ウドネスメータによるラウドネスの運用基準と音響システムの各チャンネルの重み係数が規定さ れている。これに関連して, Komori
らは22.2
マルチチャンネル音響システムにおける各チャン ネルの重み係数を主観評価実験により算出している[31, 32]
。1.3 本研究の目的と本論文の構成
1.2
節で述べたラウドネスに関する既往の研究は,
いずれも理想的な音場(
ほとんどが自由音場)
において,
ある特定の方向から到来する音に関する研究報告である。これは,
音の到来方向が明確 である点において非常に有意義な研究である。しかし,
我々の生活環境において自由音場はほとん ど存在しない。1.1
節で述べたように,
我々が良く利用する鉄道車両の車内やエレベータ内といっ た,
我々が滞在可能な製品の内部空間には,
多数の音源が広く分布していると考えらえる。このよ うな空間内の音(
製品音)
は一般に騒音として認識され,
製品の音響設計で考慮される評価指標はA
特性音圧レベル(
騒音レベル)
である。騒音の低減,
すなわちA
特性音圧レベルの低減を効果的 に実現するための検討手段や技術としては,
音響アレー(
ビームフォーミング法) [10, 33, 34],
音響 インテンシティ法[35–37]
などによる音源探査技術や, A
特性音圧レベルの低減に対して有効な改 善部位把握のための寄与分析技術[38]
などが挙げられる。め
,
特定の周波数に卓越した周波数成分をもつ複合音や,
音源が複数存在しその周波数成分が相違 する場合には聴覚特性(
マスキングなど)
により実際に知覚する音の大きさとA
特性音圧レベルの 数値は感覚的に異なる可能性がある。我々が日常生活で知覚する音のほとんどは,
複雑な周波数成 分を含む複合音かつ複数の音源からの音であるため,
必ずしもA
特性音圧レベルで示される物理 量としての音の大きさを感じているわけではない。一方,
ラウドネスは聴覚特性を考慮した(
聴覚 特性をモデル化して推定された)
音の大きさの心理量であるため,
日常生活で耳にする音を対象と した音の大きさの評価量としては適していると考えらえる。しかし,
現状はラウドネスによる製品 音の評価はあまり普及していない。一般的な音(
環境音や生活騒音など)
は低周波数が優勢である ことが多く,
この場合, A
特性音圧レベルとラウドネスは対応が良いとされる。騒音測定で広く使 用されるサウンドレベルメータにはA
特性が組み込まれているため,
騒音の測定が安易かつ実用 的な物理量であるA
特性音圧レベルが騒音評価として広く使われている。さて
, 1.2
節で述べた既往の研究結果(
例えば[20])
によると,
音の大きさ(
ラウドネス)
は音の到 来方向によって変化すると考えられる。さらに音源が分布する場合は音の到来方向が広範囲にな るために,
このような分布音源もラウドネスに対して影響を与えると考えられる。しかし,
前述の ように従来規格では全指向性が仮定されるマイクロホン1
点から取得される音を用いるため,
音の 到来方向の影響は考慮されていない。ある特定の方向から到来する音や分布する音源を対象とし た音の大きさを評価するためには,
音の到来方向や音源の分布幅などを把握する必要があるが,
従 来規格による測定ではこれらを把握することはできず,
よって従来規格ではこれらの音源を対象と した音の大きさの評価はできない。音の到来方向や音源の分布幅を考慮した音の大きさの評価が できれば,
従来の騒音の物理指標であるA
特性音圧レベルではなく,
主観指標であるラウドネスに 基づく音響指標が提案できる可能性がある。この指標により,
騒音(
音の大きさ)
を低減するため の音の到来方向や音源の分布幅の改善対象部位や改善指針などを検討することができ,
これを基に した音の大きさに関する新たな音響設計指針を獲得することができると考えられる。すなわち,
こ の音響指標を積極的に製品の音響設計に活用することで,
音の大きさの印象が良好となる高付加価 値の製品音を提供できると考えられる。自動車や家電などを対象とした製品音の音質改善は,
製品 としての価値向上に寄与する研究報告が多数ある[39–47]
。よって,
従来の物理指標(A
特性音圧 レベル)
では測ることが困難な主観指標による製品音の音質改善は,
製品の高付加価値につながる 音響設計として重要である。以上より本論文では
,
音の到来方向と音源の分布幅を考慮したラウドネスを基礎とする音の大き( 1 ) ,
する。第
2
章では,
人が聴取する場において,
音場以外で聴取に影響を与える頭部や耳介などによる 応答の変化,
つまり頭部伝達関数(HRTF)
を概説する。本論文に記載の測定では,
一貫して同 一のダミーヘッドを使用するため,
当該ダミーヘッドのHRTF
を測定し,
音の到来方向によるHRTF
の変化を確認する。測定によりHRTF
を取得する場合,
音源の位置合わせや音源の多数 点測定など非常に労力を必要とする。労力削減のために,
相反法(
入力と出力を入れ替えても入 出力間の伝達関数は変わらない定理)
を応用した測定方法[48, 49]
や, MRI(Magnetic Resonance Imaging)
などにより頭部の3
次元モデルを取得した上で,
時間領域有限差分(Finite Difference Time Domain; FDTD)
法[50]
や境界要素法(Boundary Element Method; BEM) [51]
などによ るシミュレーションを用いてHRTF
を推定する方法もあるが,
本論文では測定によりHRTF
を取 得する。第
3
章と第4
章では,
音の到来方向によるラウドネスの変化の検証を目的に実施した,
ダミー ヘッドを用いた測定と主観評価実験について述べる。第3
章では,
まずラウドネスの計算方法につ いて,
従来規格による1
点から取得される音から計算する方法と音の到来方向を考慮するために 両耳から取得される音から計算する方法をそれぞれ紹介し,
両方法の違いを述べる。その後に, 4π
空間においてある特定の方向(
単一方向)
から到来する音源,
つまり単一音源を対象に,
音の到来方 向を考慮した方法により計算されるラウドネスをダミーヘッドを用いて測定し,
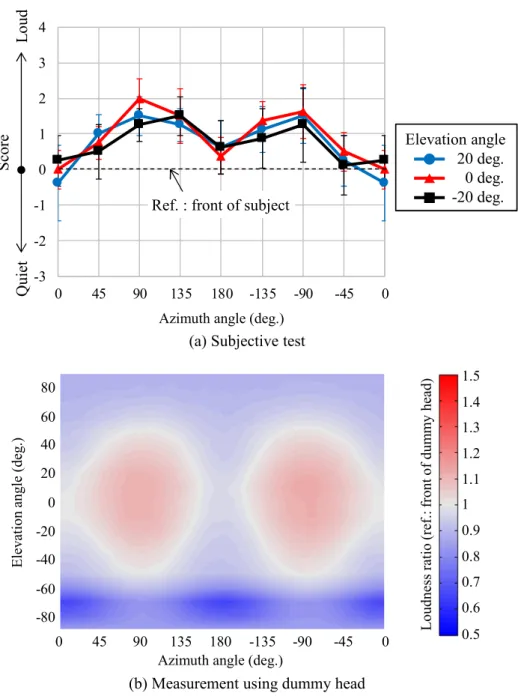
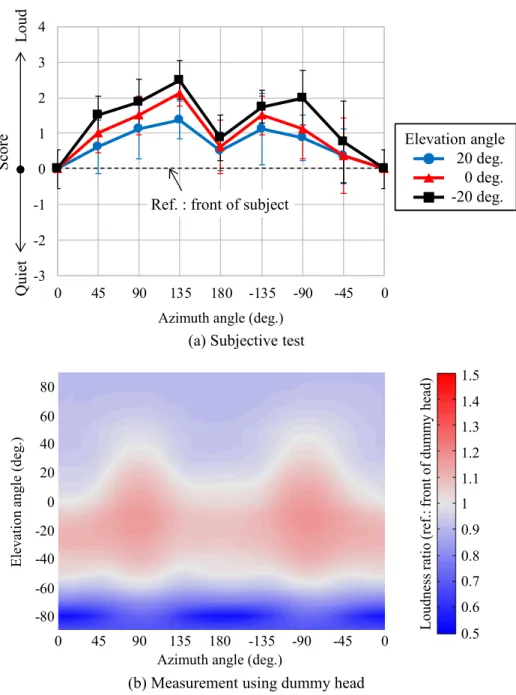
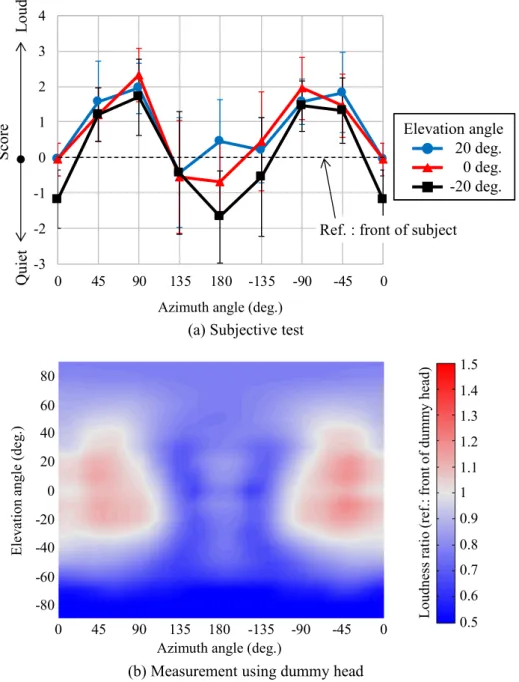
その測定で得られ た傾向の検証を目的に実施した主観評価実験について述べる。第
4
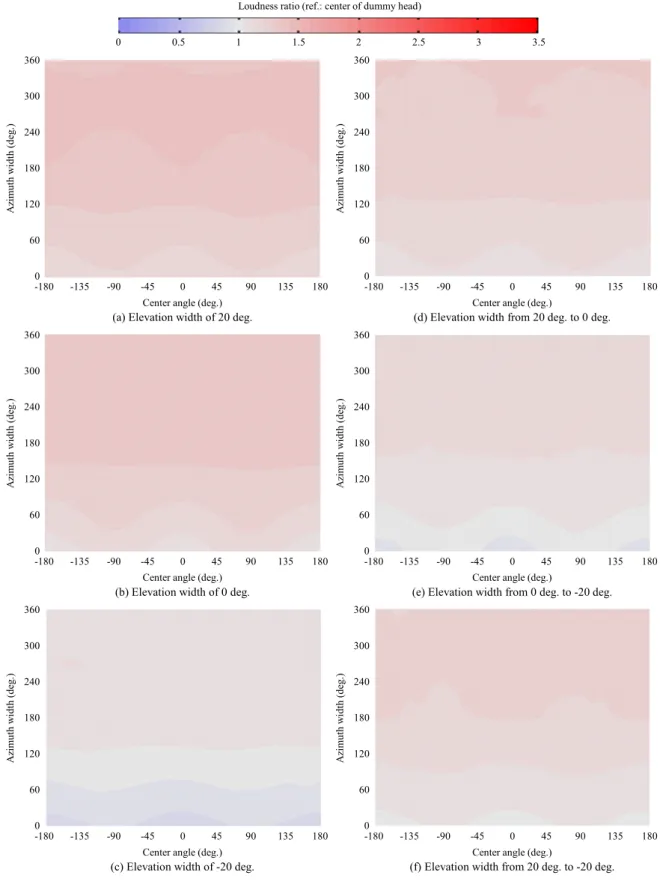
章では,
音の到来方向がある範囲をもつ音源,
つまり分布する音源(
分布音源)
を対象に,
分 布の幅や分布の中心位置によるラウドネスの変化の検証を目的に実施した,
ダミーヘッドを用いた 測定と主観評価実験について述べる。本測定における分布音源は,
分布を構成する複数の音源から 互いに無相関な音を放射させることでこれを模擬した。第
5
章では,
第3
章と第4
章で示した音の到来方向と音源の分布幅によって変化するラウドネ スの変化量を,
音圧レベルの変化量に変換することを試みる。この変換により,
騒音評価に活用可 能なラウドネスを基礎とした音の大きさに関する新たな音響指標の提案を目指す。第
6
章では,
第5
章で示した音の到来方向と音源の分布幅を考慮したラウドネスの変化量を実 際の製品音に対して適用した例について述べる。対象は,
自動車の走行音と掃除機の運転音の2
種 類とした。本適用例によって,
従来のA
特性音圧レベルやラウドネスでは評価困難な音響設計指 針の獲得の可能性について検討する。第
7
章では,
本論文の研究成果のまとめと今後の課題を述べる。Chapter 1
Chapter 2
Chapter 3 Measuring Loudness for Single Sound Source
Chapter 4 Measuring Loudness
for Distributed Sound Source
Chapter 5
Chapter 6
Chapter 7 Conclusion Introduction
Background and purpose of this research
Measuring Head-related Transfer Function
Evaluation of change in sound pressure level measured at both ears of dummy head by arrival direction of sound
Changes in loudness for single sound source were evaluated through measurement with dummy head and subjective test
Changes in loudness for distributed sound source were evaluated through measurement with dummy head and subjective test
Variation of Loudness in Consideration of Arrival Direction and Distribution Width of Sound Source
Variation in loudness (as sound pressure level) due to arrival direction and distribution width of sound source was obtained from measurements using dummy head.
Basic Study on Application of Variation in Loudness
Evaluating applicability of product sound using the variation in loudness
Summary of this research and future tasks
Fig. 1.3.1 Flowchart of each chapter constituting this paper.
第 2 章
頭部伝達関数の測定
人が聴取する場において
,
音の到来方向とラウドネスの関係性を考えるためには,
まず音の到来 方向と両耳の応答の関係,
つまり頭部伝達関数の把握が必要である。そこで本章では,
頭部伝達 関数について概説し,
本研究で一貫して使用するダミーヘッドの頭部伝達関数の測定について述 べる。2.1 頭部伝達関数について
頭部伝達関数
(Head-Related Transfer Function; HRTF)
とは, Fig. 2.1.1
に示すように自由音 場に頭部がないときの両耳の中心位置(
頭部中心)
から,
頭部があるときの外耳道入口または鼓膜 までの伝達関数である[52]
。HRTF
は,
実頭あるいは頭部と胴部を模擬したダミーヘッドの外耳 道入口または鼓膜で取得されるインパルス応答と,
実頭またはダミーヘッドの頭部中心で取得され るインパルス応答から,
次式より計算される。HRTF
E(r, θ, ϕ, ω) =
HE(r, θ, ϕ, ω)
Ho
(r
o, θ, ϕ, ω)(2.1.1)
ここに,
添え字E は左耳または右耳(L
またはR),
rは音源から各耳までの距離(m),
roは音源か ら頭部中心までの距離(m),
θは方位角(
度),
ϕは仰角(
度),
ω は角周波数(Hz),
HE は音源から 各耳の外耳道入口または鼓膜までの伝達関数,
Hoは音源から頭部中心までの伝達関数である。これまでに多くの実頭やダミーヘッドの
HRTF
が測定されており,
その一部は公開されている
[54–58]
。このようなHRTF
の測定は,
音源の位置合わせや音源の多数点測定など非常に労力を必要とする。この労力削減のために
, 1.2
節で述べたような相反法[48, 49]
やシミュレーション
[50, 51]
を用いてHRTF
を取得あるいは推定する方法が提案されているが,
本研究では測定により
HRTF
を取得する。Front Head
Sound source
Fig. 2.1.1 Head, sound source, and ear positions for calculating head-related transfer function [53]. S is sound source,E is ear,Ois center of head,ris distance from sound source to ear,rois distance from sound source to center of head,θis azimuth angle, and ϕis elevation angle.
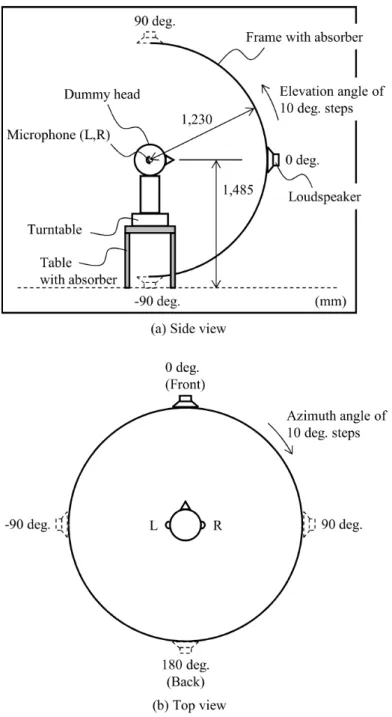
2.2 測定構成
Fig. 2.2.1
とFig. 2.2.2
は, HRTF
の測定構成図および測定写真である。無響室の中心付近に吸 音材で覆った机を設置し,
この机の上にターンテーブル(Br¨ uel & Kjær Type 5960)
と各耳の外 耳道入口にマイクロホン(Br¨ uel & Kjær Type 4190
−L
−002)
が設置されたダミーヘッド(Br¨ uel
& Kjær Type 4100)
を設置した。このとき,
無響室の床面から頭部中心までの高さは1,485 mm
である。また,
吸音材で覆った半径1,230 mm
の半円状のフレームを,
ダミーヘッドの矢状面内に フレームが配置されるように無響室の天井と側壁に設けた治具を用いて固定した。このとき,
フ レームの円周を描く円の中心はダミーヘッドの頭部中心と一致させた。このフレームには,
ダミー ヘッドの正面を仰角0
度および方位角0
度として,
仰角90
度から−90
度(
正は上方,
負は下方)
まで10
度間隔でスピーカ(GENELIC 6010A)
が設置可能な治具が設けられ,
測定対象の仰角に スピーカを設置できるようにした。また,
方位角はダミーヘッドの右耳側を正とし,
ターンテーブ ルを用いてダミーヘッドを10
度間隔で回転させることで,
方位角方向のスピーカを設定した。た だし,
仰角が90
度と−90
度の場合,
ダミーヘッドを回転させてもスピーカとダミーヘッドの各耳 に設けられたマイクロホンの位置関係や向きは変わらないため,
この2
つの仰角で測定する際のス ピーカの方位角は0
度のみとした。以上より,
仰角と方位角の組み合わせ総数(
音源総数)
は614
点となり,
これは本実験における音の到来方向の総数となる。従来の規格
[8]
による評価点は, Fig. 2.2.1
に示した構成からダミーヘッド,
ターンテーブル,
お よび机を撤去したときのダミーヘッドの頭部中心とした。頭部中心に設けるマイクロホン(Br¨ uel
& Kjær Type 4190)
は全指向性と仮定し,
音源位置はダミーヘッドの正面の1
点とした。音源の出力とマイクロホンで得られる応答の収録は
, PC
とオーディオインターフェイス(RME
Fireface UCX)
により行った。スピーカはオーディオインターフェイスと接続され,
マイクロホンはプリアンプ
(Br¨ uel & Kjær Type 2690)
と,
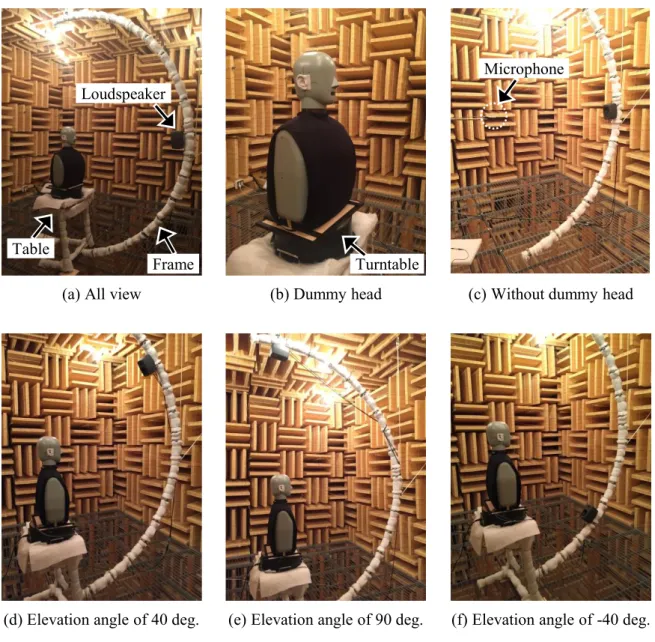
プリアンプはオーディオインターフェイスと接 続されている。Fig. 2.2.1 Setup for measuring head-related transfer function of dummy head in ane- choic chamber. Jigs were installed on semicircular frame covered with absorber for positioning loudspeakers at elevation angles every 10 degrees from 90 degrees (above the head) to −90 degrees (under the head). The head was rotated counterclockwise at azimuth-angle intervals of 10 degrees from 180 degrees to −180 degrees by using turntable. Point at which loudness was measured according standard was at center of the head when the head, turntable, and table were removed.
(a) All view
(d) Elevation angle of 40 deg.
(b) Dummy head
(e) Elevation angle of 90 deg.
(c) Without dummy head
(f) Elevation angle of -40 deg.
Loudspeaker
Microphone
Frame Turntable
Table
Fig. 2.2.2 Photos for measuring head-related transfer function of dummy head in ane- choic chamber.
を用いた。この信号は
,
有限の継続時間内において対数周波数が時間とともに変化する正弦波パル ス信号であり,
次式で設計される。S(k) =
1 (k = 0)
√
1
k
exp(jak log
k) (0
< k≤ N2
)
(2.3.1)
S(N −k)∗
(N
2
< k < N )ここに
,
Nは信号長(=2
n),
nは任意に設定するFFT(Fast Fourier Transform)
の次数,
m=
N/4,log
は自然対数であり,
aは,
a
= 2mπ
N
2 log
(N
2
)
(2.3.2)
となるように設定する。また
,
∗は複素共役である。この信号は,
周波数成分が−3 dB/oct.
で減 衰する特徴をもつため, Pink TSP
とも呼ばれる[59]
。この信号S(k)に対して逆フィルタ特性を もつ信号S−1(k)
を畳み込むことで,
インパルス応答を得る。本測定において,
サンプリング周波数は
48 kHz,
同期加算回数はゼロ(1
回の信号で分析)
とした。また,
分析するインパルス応答長は
479
サンプル(
約10 ms)
とした。2.4 測定結果
2.4.1 インパルス応答
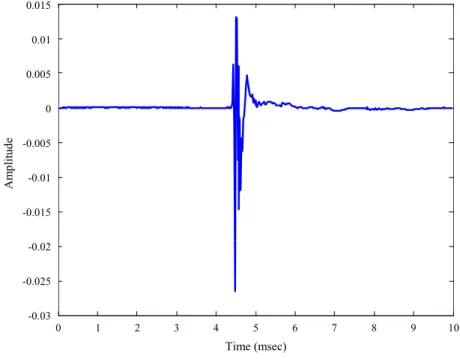
Fig. 2.4.1
は,
音源がダミーヘッドの正面に配置されたときの頭部中心に設置されたマイクロホンにより測定されたインパルス応答である。
4.5 msec
付近に見られる直接波の直後(4.8 msec
付 近)
には,
机によるものと考えられる反射波が観測されているが,
それ以降の約5.5 msec
の間(
行路差約
1.9 m
以内)
に振幅の大きな反射波は見られない。よって,
本測定における無響室内の反射波の影響は小さいと判断できる。
ダミーヘッドの各耳で測定されたインパルス応答の総数は
,
音源の数(
音の到来方向の数)
と同 じ614
点である。ここでは,
代表的なインパルス応答から音の到来方向によるインパルス応答の 違いを示す。0.015
0.01
0.005
0
-0.005
-0.01
-0.015
Amplitude
Time (msec)
10 9 8 7 6 5 4 3 2 1 0 -0.02
-0.025
-0.03
Fig. 2.4.1 Impulse response measured at center of dummy head when sound source was positioned at front of the head (at elevation angle and azimuth angle of 0 degrees).
ルス応答である。
Fig. 2.4.2
とFig. 2.4.3
に示すように,
方位角が0
度から90
度に向かうにした がって音源は右耳側へ移動するために,
左耳で観測される直接波の到達時刻は右耳より遅れ,
かつ 左耳の波形の振幅は右耳と比べて小さくなることが確認できる。またFig. 2.4.4
とFig. 2.4.5
に 示すように,
方位角が90
度から180
度に向かうにしたがって音源は背後に向かうため,
両耳に到 達する音波の時間差が小さくなり,
かつ振幅はほぼ同じになっていくことが確認できる。音源位置が方位角0度の場合
Fig. 2.4.6
からFig. 2.4.9
は,
音源が方位角0
度かつ仰角が90
度から−90
度まで30
度ごとに 位置しているとき(
音源が矢状面内に存在しているとき)
に両耳で測定されたインパルス応答であ る。Fig. 2.4.6(a)
に示す仰角90
度のインパルス応答を見ると, 4.5 msc
付近に見られる直接波か ら約3.7 msec
後(
行路差約1.3 m)
の約8.2 msec
付近に反射波が確認できる。この反射波は,
音 源から頭部中心までの距離と,
音源から机に反射して頭部中心に到達するまでの距離の差約1.4 m
とほぼ同じ行路差であるため,
机による反射波と考えられる。Fig. 2.4.6
からFig. 2.4.9
より,
仰 角90
度から−90度に向かっても,
両耳への到達時刻や両耳の振幅はほぼ同じであることが確認 できる。これは,
矢状面内に配置された音源と各耳への位置関係はほぼ同じためである。さらにFig. 2.4.9
に示す音源位置が仰角−90
度のインパルス応答の波形は,
他の波形と比べて大きく乱れていることが確認できる。
Fig. 2.4.10
は音源位置が仰角−60
度から−90
度まで10
度ごとに位 置しているときの両耳のインパルス応答であるが,
前述の波形の乱れは仰角−70
度から小さく現れ始め
(6 msec
付近),
仰角−80度と−90度では波形の乱れが明確に確認できる。これらの角度は
,
音源がダミーヘッドの胴部や机の下方に位置するため,
これらの波形の乱れは机やターンテー ブルによる回折が原因であると考えられる。よって,
仰角−70度から−90度の結果は参考結果と する。Left Right
Ă Ă Ă Ă Ă Ă Ă Ă Ă Ă ĂĂ
(a) Azimuth angle of 0 degrees
0 3
Time (msec) -0.025
-0.02 -0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02 0.025
Amplitude
1 2 4 5 6 7 8 9 10
0 3
Time (msec) -0.04
-0.03 -0.02 -0.01 0 0.01 0.02 0.03
Amplitude
1 2 4 5 6 7 8 9 10
(b) Azimuth angle of 30 degrees
Fig. 2.4.2 Impulse responses mesured at left and right ears of dummy head when sound source was positioned at elevation angle of 0 degrees and azimuth angle of; (a) 0 degrees and (b) 30 degrees.
(a) Azimuth angle of 60 degrees
0 3
Time (msec) -0.05
-0.03 -0.02 -0.01 0 0.01 0.02
Amplitude
1 2 4 5 6 7 8 9 10
-0.04
0 3
Time (msec) -0.05
-0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04
Amplitude
1 2 4 5 6 7 8 9 10
-0.04
(b) Azimuth angle of 90 degrees
Fig. 2.4.3 Impulse responses mesured at left and right ears of dummy head when sound source was positioned at elevation angle of 0 degrees and azimuth angle of; (a) 60 degrees and (b) 90 degrees.
Left Right
(a) Azimuth angle of 120 degrees
0 3
Time (msec) -0.04
-0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04
Amplitude
1 2 4 5 6 7 8 9 10
0 3
Time (msec) -0.025
-0.02 -0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02 0.025
Amplitude
1 2 4 5 6 7 8 9 10
(b) Azimuth angle of 150 degrees
Fig. 2.4.4 Impulse responses mesured at left and right ears of dummy head when sound source was positioned at elevation angle of 0 degrees and azimuth angle of; (a) 120 degrees and (b) 150 degrees.
Left Right
0 3
Time (msec) -0.015
-0.01 -0.005 0 0.005 0.01 0.015
Amplitude
1 2 4 5 6 7 8 9 10
Fig. 2.4.5 Impulse responses measured at left and right ears of dummy head when sound source was positioned at elevation angle of 0 degrees and azimuth angle of 180 degrees.
0 3
Time (msec) -0.02
-0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02
Amplitude
1 2 4 5 6 7 8 9 10
0 3
Time (msec) -0.02
-0.015 -0.01 -0.005 0 0.005 0.01 0.015
Amplitude
1 2 4 5 6 7 8 9 10
Left Right
(a) Elevation angle of 90 degrees
(b) Elevation angle of 60 degrees
Fig. 2.4.6 Impulse responses measured at left and right ears of dummy head when sound source was positioned at azimuth angle of 0 degrees and elevation angle of; (a) 90 degrees and (b) 60 degrees.
0 3
Time (msec) -0.02
-0.015 -0.01 -0.005 0 0.005 0.01 0.015
Amplitude
1 2 4 5 6 7 8 9 10
0 3
Time (msec) -0.025
-0.02 -0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02 0.025
Amplitude
1 2 4 5 6 7 8 9 10
(a) Elevation angle of 30 degrees
(b) Elevation angle of 0 degrees
Fig. 2.4.7 Impulse responses measured at left and right ears of dummy head when sound source was positioned at azimuth angle of 0 degrees and elevation angle of; (a) 30 degrees and (b) 0 degrees.
0 3
Time (msec) -0.025
-0.02 -0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02 0.025
Amplitude
1 2 4 5 6 7 8 9 10
0 3
Time (msec) -0.015
-0.01 -0.005 0 0.005 0.01 0.015
Amplitude
1 2 4 5 6 7 8 9 10
Left Right
(a) Elevation angle of -30 degrees
(b) Elevation angle of -60 degrees
Fig. 2.4.8 Impulse responses measured at left and right ears of dummy head when sound source was positioned at azimuth angle of 0 degrees and elevation angle of; (a)
−30 degrees and (b)−60 degrees.
0 3
Time (msec) -2
-1 -0.5 0 1 1.5
Amplitude
1 2 4 5 6 7 8 9 10
-1.5 x 10-3
0.5
Left Right
Fig. 2.4.9 Impulse responses measured at left and right ears of dummy head when sound source was positioned at azimuth angle of 0 degrees and elevation angle of−90 degrees. The responses were affected by diffraction caused by table and turntable.
0 3
Time (msec) -0.015
-0.01 -0.005 0 0.005 0.01 0.015
Amplitude
1 2 4 5 6 7 8 9 10
0 3
Time (msec) -2
-1 -0.5 0 1 1.5
Amplitude
1 2 4 5 6 7 8 9 10
-1.5 x 10-3
0.5
0 3
Time (msec) -8
-4 -2 0 4 6
Amplitude
1 2 4 5 6 7 8 9 10
-6 x 10-3
2
0 3
Time (msec) -1.5
-1 -0.5 0 1 1.5
Amplitude
1 2 4 5 6 7 8 9 10
x 10-3
0.5
(a) Elevation angle of -60 degrees
(b) Elevation angle of -70 degrees
(c) Elevation angle of -80 degrees
(d) Elevation angle of -90 degrees
Left Right
Fig. 2.4.10 Impulse responses measured at left and right ears of dummy head when sound source was positioned at azimuth angle of 0 degrees and elevation angle of; (a)
−60 degrees, (b) −70 degrees, (c) −80 degrees, and (d) −90 degrees. The responses when sound source was positioned at elevation angle of−70 degrees,−80 degrees, and
−90 degrees were affected by diffraction caused by table and turntable.
確認する。
音源位置が仰角0度の場合
Fig. 2.4.11
からFig. 2.4.14
は,
音源が仰角0
度かつ方位角が0
度から180
度まで30
度ごとに 位置している条件において計算されたHRTF
である。Fig. 2.4.11
より,
仰角0
度かつ方位角0
度(
ダミーヘッドの正面)
のHRTF
は,
約1.6 kHz
以下では頭部中心(
縦軸が0 dB)
との差は小さ いが, 2 kHz
以上では差が大きくなる傾向が確認できる。これは, 2 kHz
の波長(
約170 mm)
と,
日本人の青年における頭長(
眉間点から後頭点までの長さ)
が約184 mm(
男女平均),
頭幅(
頭部の最大幅
)
が約157 mm(
男女平均) [60]
で同程度の長さであるためと考えられる。つまり, 2 kHz
付近を境に
,
高周波数は頭部や耳介などにより反射や回折の影響が大きくなるためと考えられる。4 kHz
から5 kHz
に見られるピークと9 kHz
付近のディップも前述の反射や回折の影響によるものであると考えられる。
Fig. 2.4.11
に示したHRTF
は,
先行研究の一例[53]
と比較すると,
ダ ミーヘッドそのものは本測定で使用したものと異なるもののその傾向は類似しており,
本測定結 果は妥当であると判断できる。また, Fig. 2.4.11(a)
に示した方位角0
度では両耳のHRTF
はほ ぼ同じであるが, Fig. 2.4.11
とFig. 2.4.12
に示すように方位角が0
度から90
度に向かうにした がって両耳のHRTF
の差が大きくなり, Fig. 2.4.13
とFig. 2.4.14
に示すように方位角が90
度か ら180
度に向かうにしたがってその差は小さくなり, 180
度では再び両耳のHRTF
がほぼ同じと なる。これは2.4.1
項で述べたように,
音源と両耳の位置関係によるものである。つまり,
両耳のHRTF
の差が大きいときには音源がいずれかの耳の方向に存在し,
両耳のHRTF
の差が小さいと きには頭部中心を含む矢状面近傍に音源が存在していると判断できる。音源位置が方位角0度の場合
Fig. 2.4.15
からFig. 2.4.18
は,
音源が方位角0
度かつ仰角が90
度から−90
度まで30
度ごと に位置している条件において計算されたHRTF
である。Fig. 2.4.15
からFig. 2.4.18
より,
仰角 の変化に伴う両耳のHRTF
差は小さいことが確認できる。これも前述した音源と両耳の位置関係 によるものである。Fig. 2.4.18
に示す仰角−90
度の場合では,
両耳のHRTF
は他の音源位置と 比べて大きく低減しているが,
これは2.4.1
項で述べたように机やターンテーブルによる回折が原 因であると考えられる。よって,
仰角−70
度から−90
度は参考結果である。100 1k 10k Frequency(Hz)
-30 -25 -20 -15 -10 -5 0 5 10 15 20
Relative level (dB)
100 1k 10k
Frequency(Hz) -30
-25 -20 -15 -10 -5 0 5 10 15 20
Relative level (dB)
(a) Azimuth angle of 0 degrees
(b) Azimuth angle of 30 degrees Left Right
Fig. 2.4.11 Head-related transfer functions measured at left and right ears of dummy head when sound source was positioned at elevation angle of 0 degrees and azimuth angle of; (a) 0 degrees and (b) 30 degrees.
100 1k 10k Frequency(Hz)
-30 -25 -20 -15 -10 -5 0 5 10
Relative level (dB)
100 1k 10k
Frequency(Hz) -30
-25 -20 -15 -10 -5 0 5 10 15 20
Relative level (dB)
(a) Azimuth angle of 60 degrees
(b) Azimuth angle of 90 degrees
Fig. 2.4.12 Head-related transfer functions measured at left and right ears of dummy head when sound source was positioned at elevation angle of 0 degrees and azimuth angle of; (a) 60 degrees and (b) 90 degrees.
100 1k 10k Frequency(Hz)
-30 -25 -20 -15 -10 -5 0 5 10 15 20
Relative level (dB)
100 1k 10k
Frequency(Hz) -30
-25 -20 -15 -10 -5 0 5 10 15 20
Relative level (dB)
(a) Azimuth angle of 120 degrees
(b) Azimuth angle of 150 degrees Left Right
Fig. 2.4.13 Head-related transfer functions measured at left and right ears of dummy head when sound source was positioned at elevation angle of 0 degrees and azimuth angle of; (a) 120 degrees and (b) 150 degrees.
100 1k 10k Frequency(Hz)
-30 -25 -20 -15 -10 -5 0 5 10 15 20
Relative level (dB)
Left Right
Fig. 2.4.14 Head-related transfer functions measured at left and right ears of dummy head when sound source was positioned at elevation angle of 0 degrees and azimuth angle of 180 degrees.
100 1k 10k Frequency(Hz)
-30 -25 -20 -15 -10 -5 0 5 10 15 20
Relative level (dB)
100 1k 10k
Frequency(Hz) -30
-25 -20 -15 -10 -5 0 5 10 15 20
Relative level (dB)
(a) Elevation angle of 90 degrees
(b) Elevation angle of 60 degrees
Left Right
Fig. 2.4.15 Head-related transfer functions measured at left and right ears of dummy head when sound source was positioned at azimuth angle of 0 degrees and elevation angle of; (a) 90 degrees and (b) 60 degrees.
100 1k 10k Frequency(Hz)
-30 -25 -20 -15 -10 -5 0 5 10
Relative level (dB)
100 1k 10k
Frequency(Hz) -30
-25 -20 -15 -10 -5 0 5 10 15 20
Relative level (dB)
(a) Elevation angle of 30 degrees
(b) Elevation angle of 0 degrees
Fig. 2.4.16 Head-related transfer functions measured at left and right ears of dummy head when sound source was positioned at azimuth angle of 0 degrees and elevation angle of; (a) 30 degrees and (b) 0 degrees.
100 1k 10k Frequency(Hz)
-30 -25 -20 -15 -10 -5 0 5 10 15 20
Relative level (dB)
100 1k 10k
Frequency(Hz) -30
-25 -20 -15 -10 -5 0 5 10 15 20
Relative level (dB)
(a) Elevation angle of -30 degrees
(b) Elevation angle of -60 degrees
Left Right
Fig. 2.4.17 Head-related transfer functions measured at left and right ears of dummy head when sound source was positioned at azimuth angle of 0 degrees and elevation angle of; (a)−30 degrees and (b)−60 degrees.
100 1k 10k Frequency(Hz)
-30 -25 -20 -15 -10 -5 0 5
Relative level (dB)
Fig. 2.4.18 Head-related transfer functions measured at left and right ears of dummy head when sound source was positioned at azimuth angle of 0 degrees and elevation angle of−90 degrees. These head-related transfer functions were reference only, because of influence of diffraction caused by table and turntable.
2.5 本章のまとめ
本章では