著者
若張 直紀
学位授与機関
Tohoku University
Brzozowski
系の
DFA
最小化アルゴリズムの
解析に関する研究
東北大学 大学院情報科学研究科
システム情報科学専攻 篠原・吉仲研究室
博士課程前期
2
年の課程
若張 直紀
2020
年
2
月
21
日
目次
第 1 章 序論 1 1.1 はじめに . . . . 1 1.2 構成 . . . . 3 第 2 章 準備 4 2.1 言語及び有限オートマトン . . . . 4 2.2 多項式時間アトミック化アルゴリズム . . . . 8 2.3 DFA の Brzozowski 系状態数最小化アルゴリズム . . . . 12 第 3 章 V´azquez らのアルゴリズムの出力の状態数の解析 16 3.1 任意の NFA を入力とする場合の出力の最大状態数 . . . . 16 3.1.1 |Σ| = 1 のとき . . . . 18 3.1.2 |Σ| ≥ 2 のとき . . . . 20 3.2 到達可能な DFA を反転したものを入力とする場合の出力の最大状態数 . 21 3.2.1 |Σ| = 1 のとき . . . . 23 3.2.2 |Σ| ≥ 2 のとき . . . . 25 3.3 V´azquez らのアルゴリズムの出力の状態数 . . . . 27 第 4 章 V´azquez らのアルゴリズムの出力の平均状態数の削減 31 4.1 出力の平均状態数を削減するため検討 . . . . 31 4.2 実験 4.2:Brzozowski 系アルゴリズムの中間状態数の比較 . . . . 33 4.3 実験 4.3:状態の選択順による出力の状態数の変化 . . . . 33 4.4 実験 4.4:文字の選択順による出力の状態数の変化 . . . . 36 4.5 実験 4.5:状態と文字の選択順による出力の状態数の変化 . . . . 36 4.6 より有効な選択順の検討 . . . . 384.6.1 状態の選択順 . . . . 38 4.6.2 文字の選択順 . . . . 40 第 5 章 V´azquez らのアルゴリズムの高速な実装手法の考案 43 5.1 提案アルゴリズム . . . . 43 5.2 実験 5.2:実装手法の違いによる V´azquez らのアルゴリズムの実行時間の 違い . . . . 48 5.3 実験 5.3:アトミック化の実装手法の違いによる拡張 Brzozowski アルゴリ ズムの実行時間の違い . . . . 50 5.4 Brzozowski 系アルゴリズムと Hopcroft によるアルゴリズム . . . . 51 5.5 提案手法を用いた拡張 Brzozowski アルゴリズムと Hopcroft によるアルゴ リズムを用いた DFA 最小化の実行時間の比較 . . . . 51 第 6 章 結論 55 参考文献 56
第
1
章
序論
1.1
はじめに
有限オートマトンは,メモリが有限なコンピュータの動作をモデル化したものの一つ である [1].具体的には,文字列 w を入力とし,その文字列 w を受理するか否かを出力す るものである.ある有限オートマトンで受理される文字列の集合を,その有限オートマ トンで受理される言語と呼ぶ.有限オートマトンには,決定性有限オートマトン(DFA) や非決定性有限オートマトン(NFA)等があり,ある言語を受理する有限オートマトン は,一般に複数存在する.これは,DFA や NFA に限ったとしても同様であり,状態数や 状態遷移が互いに異なる DFA(または NFA)が,同じ言語を受理することがある.そこ で,ある言語を受理する有限オートマトンの中で最もシンプルなもの(ここでは最も状 態数の少ないもの)をいかに求めるかという関心が生じる. 有限オートマトンの状態数の最小化によってできることには,主に以下の二つがある. 一つ目は,2 つの有限オートマトンに対して,それらが同じ言語を受理するか否かを判定 することである.ある言語を受理する DFA のなかで,状態数最小なものはただ1つであ るから,与えられた有限オートマトンと等価な状態数最小 DFA をそれぞれ求めて,その 状態数最小 DFA 同士を比較すればよい [2]. 二つ目は,効率的な実装が可能になるということである.前述のように,有限オート マトンは,コンピュータの動作をモデル化したものであった.よって,実システムの設 計等で,システムの要件を満たす有限オートマトンを,たとえそれが冗長なものであっ たとしても構築できれば,その有限オートマトンと等価で状態数最小な有限オートマトンを求めることができる.そして,この状態数最小の有限オートマトンをもとにするこ とで,より効率的な実装が可能になる.状態数の最小化は,論理設計,コンパイラ,文 字列処理,及び画像解析等で利用実績がある [2, 3]. DFA の最小化の基本的な考え方は,同じ働きをするとみなせる状態を一つにまとめる ことである.これを実現する直感的な方法として,最小化したい DFA の状態を,はじめ に最終状態のグループと非最終状態のグループに分割し,さらに各グループの状態の遷 移先が同じグループになるか否かで分割していくことを繰り返すものがある.こうした 考えによる Hopcroft によるアルゴリズム [4] の実行時間は,n を入力の DFA の状態数と して,O(n log n) である.一方,NFA の初期状態と最終状態を交換し,全ての状態遷移を 逆にする操作を反転とよぶが,反転と決定性化を 2 回繰り返すことで状態数最小の DFA を得るという,Brzozowski によるアルゴリズム [5] が存在する.この Brzozowski による アルゴリズムは,最悪時計算量は指数時間であるが,入力によっては非常に効率的なこ と,(DFA だけでなく)NFA も入力とできること,及び処理手順や実装が分かりやすいと いった,優れた面もある [3].なお,これらの,分割を繰り返す方法と,2 回反転(と決 定性化)を行う方法は,相互の関係性が指摘されている [6].
Brzozowski によるアルゴリズムは,入力の DFA(または NFA)を反転して,決定性化 (DFA 化)して,さらに反転して,決定性化するものであるが,1 回目の決定性化の後の 状態数が,入力の DFA の状態数を n とすると,最大で 2nになるのが問題であった.し かし,この 1 回目の決定性化を,NFA のクラスの一つであるアトミックな NFA を得る 操作に拡張しても,DFA を最小化できることが示された [7].V´azquez ら [8] は,状態数 n の NFA を入力とし,最大でも状態数が 2n− 1 であるアトミックな NFA を求めるアル ゴリズムを示し,これら Brzozowski アルゴリズムの拡張とアトミック化アルゴリズムに よって,多項式時間の DFA の最小化アルゴリズムが実現された. そこで本論文では,DFA の状態数の最小化アルゴリズムの一種である,Brzozowski に よるアルゴリズムとその拡張版アルゴリズムについて,その計算量に影響を及ぼす両ア ルゴリズムの 2 回目の操作,特に拡張版アルゴリズムのアトミック化に着目する.そし て,V´azquez らの解析では言及されていなかった,DFA を反転したものをアトミック化 した場合の出力の状態数,及び出力の状態数が最大となる入力例等について述べる.ま
た,両方の最小化アルゴリズムの 2 回目の操作の後の NFA の状態数を,実験的に比較す る.さらに,V´azquez らのアルゴリズムで任意性のある部分の工夫による,出力の平均 状態数の削減や,実装手法の工夫による高速化についても述べる.
1.2
構成
本論文の構成を以下に示す.第 2 章では,本論文で用いる用語を定義したうえで,V´azquez らのアルゴリズム,Brzozowski によるアルゴリズム,及びその拡張版アルゴリズムを説 明する.第 3 章では,V´azquez らのアルゴリズムについて,その出力の NFA の最大・最 小状態数,及び出力の状態数が最大・最小となる入力例について述べる.第 4 章では,両 方の最小化アルゴリズムの途中の NFA の状態数を,実験的に比較した結果を示すととも に,V´azquez らのアルゴリズムで任意性のある,状態と文字の選択順の工夫による,出 力の平均状態数の削減について述べる.第 5 章では,V´azquez らのアルゴリズムの高速 な実装手法について述べる.最後に,第 6 章で本論文をまとめる.第
2
章
準備
2.1
言語及び有限オートマトン
Σ を有限のアルファベットとする.Σ の元である記号を有限個並べたものを,文字列と 呼ぶ.長さが 0 の文字列を空文字列と呼び,ϵ で表す.文字列 w の長さを,|w| と表す.Σ 上のすべての文字列からなる集合を,Σ∗と表す.Σ∗の任意の部分集合を,Σ 上の言語と 呼ぶ. Σ 上の言語 L, K について,補集合 L = Σ∗ \ L = {w ∈ Σ∗ | w /∈ L},和集合 K ∪ L = {w ∈ Σ∗ | w ∈ K or w ∈ L},積集合 K ∩ L = {w ∈ Σ∗ | w ∈ K and w ∈ L},連結 KL ={w ∈ Σ∗ | w = uv, u ∈ K, v ∈ L} をそれぞれ用いる.また,2Sを,集合 S の冪集 合とする.非決定性有限オートマトン(Nondeterministic Finite Automaton, NFA)は,5 項組
M = (Q, Σ, δ, I, F ) であり,Q は状態の有限で非空な集合,Σ は有限で非空なアルファ ベット,δ : Q× Σ → 2Qは遷移関数,I ⊆ Q は初期状態の集合,及び F ⊆ Q は最終状 態の集合である. ここで,遷移関数 δ は,δ′ : Q× Σ∗ → 2Q及び δ′′: 2Q× Σ∗ → 2Qへ拡張して用いる場合 もある.ただし,δ′ : Q×Σ∗ → 2Qは,δ : Q×Σ → 2Qに対して,状態 q∈ Q,文字 a ∈ Σ, 文字列 w∈ Σ∗を用いて,δ′(q, ϵ) ={q} かつ δ′(q, aw) = δ′(δ(q, a), w) と拡張したものであ る.また,δ′′ : 2Q× Σ∗ → 2Qは,δ′ : Q× Σ∗ → 2Qに対して,状態 q∈ Q,状態の部分集 合 P ⊆ Q,文字列 w ∈ Σ∗を用いて,δ′′(∅, w) = ∅ かつ δ′′({q}∪P, w) = δ′(q, w)∪δ′′(P, w) と拡張したものである.今後,遷移関数 δ,δ′,及び δ′′の表記は区別せず,全てに対して
NFA
図 2.1: NFA M の一例. δ を用いる. NFA M によって受理される言語は,L(M ) ={w ∈ Σ∗ | δ(I, w) ∩ F ̸= ∅} である.2 つ の NFA が同じ言語を受理するとき,それらは等価であるという.NFA M の状態 q の左 言語は,LI,q(M ) ={w ∈ Σ∗ | q ∈ δ(I, w)} である.状態 q の右言語は,Lq,F(M ) ={w ∈ Σ∗ | δ(q, w) ∩ F ̸= ∅} である.状態 q の左言語が空である時,その状態 q は到達不可能と 呼ぶ.到達不可能な状態を持たないとき,その NFA は到達可能であるという. 例 1. 図 2.1 に示す NFA M = (Q, Σ, δ, I, F ) について,各状態の左言語は,LI,0(M ) ={ϵ},LI,1(M ) ={a},LI,2(M ) ={b},及び LI,3(M ) ={ab, ba} である.
また,M の各状態の右言語は,L0,F(M ) ={a, ab, b, ba},L1,F(M ) ={ϵ, b},L2,F(M ) =
{ϵ, a},及び L3,F(M ) ={ϵ} である.
決定性有限オートマトン(Deterministic Finite Auotmaton, DFA)は,5 項組 M =
(Q, Σ, δ,{q0}, F ) であり,Q,Σ,δ,及び F は NFA と同様であるが,δ の値域は単集合に 制限されたものであり,q0は初期状態である.すなわち,DFA は,初期状態集合が{q0}, 遷移関数の値域が集合 Q の単集合に制限された NFA である.到達不可能な状態を持た ず,互いに等価な状態を含まない DFA は,最小である. NFA M = (Q, Σ, δ, I, F ) について,M の初期状態と最終状態を交換し,全ての状態遷 移を逆にする操作を反転と呼ぶ.M を反転したもの Rev(M ) は,q ∈ δR(p, a) ⇐⇒ p ∈
δ(q, a) である NFA Rev(M ) = (Q, Σ, δR, F, I) である.すなわち,Rev(Rev(M )) = M が
2 0 1 2 0 1 反転 NFA NFA 図 2.2: 反転の例. 例 2. 図 2.2 に反転の例を示す.図 2.2 では,NFA M で初期状態である状態 0 が,NFA Rev(M ) では最終状態となっている.また,M で最終状態である状態 0, 2 が,Rev(M ) で は初期状態となっている.状態遷移については,例えば,M で状態 1 から 0 に文字 a に よる遷移があるが,Rev(M ) では状態 0 から 1 の向きとなっている. NFA M = (Q, Σ, δ, I, F ) について,F′ = {P ∈ 2Q | P ∩ F ̸= ∅},δ′(P, a) = ∪ p∈Pδ(p, a) = δ(P, a) である M′ = (2 Q, Σ, δ′,{I}, F′) を考える.この M′ は,M と等 価な DFA であり,M′を到達可能にしたものを Det(M ) と表す.具体的には,Q′′ ={R ∈ 2Q | L {I},R(M′)̸= ∅},R ∈ Q′′である R について δ′′(R, a) = δ′(R, a),及び F′′ = F′∩ Q′′
に対して,Det(M ) = (Q′′, Σ, δ′′,{I}, F′′) である.Det(M ) を求めることを,決定性化と
呼ぶ.決定性化には,状態 I を出力の初期状態として,状態からの遷移先を繰り返し求 めていく,部分集合法を用いる. 例 3. 図 2.3 に決定性化の例を示す.まず,NFA M の初期状態 0, 2 をまとめた状態{0, 2} を,求める Det(M ) の初期状態とする.続いて,状態{0, 2} からの遷移先を調べる.文 字 a について,M における状態 0 からの遷移先は 0, 1,状態 2 からの遷移先は 2 である から,Det(M ) において,状態{0, 2} からの遷移先として {0, 1, 2} を追加する.また,文 字 b について,M における状態 0, 2 からの遷移先は 1, 2 であるから,Det(M ) において, 状態{0, 2} からの遷移先として {1, 2} を追加する.同様にして,新たに追加された状態 の遷移先を調べていくと,図 2.3 に示す Det(M ) が求まる. 文字列 w による言語 L の左商(または商) とは,言語 w−1L = {x ∈ Σ∗ | wx ∈ L} で ある.NFA M が受理する言語 L(M ) の左商集合は有限である.空でない言語 L′ が,L の左商集合{L1, L2, ..., Ln} に対して, eLi ∈ {Li, Li} を用いて L′ = fL1∩ fL2∩ ... ∩ fLnと 書け,かつ L′ ̸= L 1∩ L2∩ ... ∩ Lnであるとき,L′は L のアトムであるという.NFA M
決定性化 NFA DFA 2 0 1 {0,2} {0,1,2} {1,2} {0,1} {2} ∅ {1} {0} 図 2.3: 決定性化の例. について,その全ての状態の右言語が,L(M ) のアトムの和集合であるとき,M はアト ミックであるという.
例 4. アルファベット Σ = {a, b} 上の言語 L = {a, ab, b, ba} について,L0 = ϵ−1L =
{a, ab, b, ba},L1 = a−1L ={ϵ, b},L2 = b−1L ={ϵ, a},及び L3 = (ab)−1L = (ba)−1L =
{ϵ} はそれぞれ,L の左商である.
また,L0∩ L1∩ L2∩ L3 ={a},L0∩ L1∩ L2∩ L3 ={b},L0∩ L1∩ L2∩ L3 ={ab, ba}, 及び L0∩ L1∩ L2∩ L3 ={ϵ} はそれぞれ,L のアトムである.
例 5. 図 2.1 に示す NFA M = (Q, Σ, δ, I, F ) について,M の各状態の右言語は,L0,F(M ) =
{a, ab, b, ba},L1,F(M ) = {ϵ, b},L2,F(M ) = {ϵ, a},及び L3,F(M ) = {ϵ} である.ここ
で,L(M ) = {a, ab, b, ba} のアトムは,例 4 より,{a},{b},{ab, ba},及び {ϵ} である
が,N の各状態の右言語は,L0,F(M ) = {a} ∪ {b} ∪ {ab, ba},L1,F(M ) = {b} ∪ {ϵ},
L2,F(M ) = {a} ∪ {ϵ},及び L3,F(M ) ={ϵ} のように,それぞれ L(M) のアトムの和集合
で表せるため,M はアトミックである.
定義 1 で,NFA のレプリカを定義する.NFA M のレプリカは,M と等価な NFA の一 種である.
定義 1 (V´azquez, Garc´ıa, and L´opez [8]). NFA M = (Q, Σ, δ, I, F ) に対して,以下の条
件を満たす到達可能な NFA M′ = (Q′, Σ, δ′, I′, F′) を,M のレプリカと呼ぶ.
{1,2} ∅ {0,1,2,3} {1,2} {0,3} {1} {2} {0,2} {1,3} {0,1} {2,3} NFA NFA NFA NFA 図 2.4: NFA M とそのレプリカの一部 M1, M2, 及び M3. • I =∪P∈I′P . • F′ ={P ∈ Q′ | P ∩ F ̸= ∅}. • ∀P ∈ Q′,∀a ∈ Σ, δ′(P, a) ={P 1, ..., Pk}.ただし,Pi ∈ Q′,δ(P, a) = ∪k i=1Pi. M のレプリカは,一般に複数存在する. 例 6. 図 2.4 にレプリカの例を示す.NFA M のレプリカとしては,例えば,M に部分集 合法を適用した M1 = Det(M ) がある.また,部分集合法ではある文字による遷移先状 態はただ一つであるが,2 つ以上の状態に分割遷移させた M2のようなものも,M のレプ リカである.さらに,初期状態を分割させた M3のようなものも,M のレプリカである. 集合 Q について,Q = ∪1≤i≤kPiを満たす,Q の互いに素で非空な部分集合 Piの集合 {P1, P2, ..., Pk} を,集合 Q の分割と呼ぶ.S | P = {P ∩S, P \S}\{∅} を,P の S による分 割と呼ぶ.また,集合 Q の2つの分割P, P′に対し,P∧P′ ={P ∩P′ | P ∈ P, P′ ∈ P′}\{∅} を,P と P′の粗分割と呼ぶ.
2.2
多項式時間アトミック化アルゴリズム
アトミックな NFA を求める多項式時間のアルゴリズムが,V´azquez らによって提案さ れている [8].これを,Algorithm 1 に示す.Algorithm 1 は,NFA を入力として,そのレプリカを出力するアルゴリズムである.ただし,到達可能な DFA を反転したものを入 力とすると,その出力はアトミックなレプリカとなることが示されている.本論文では, NFA M に Algorithm 1 を適用したものを Atom(M ) と表記する.また,Algorithm 1 を
V´azquez らのアルゴリズムと呼ぶ. Algorithm 1 V´azquez らのアルゴリズム [8] Require: A NFA M = (Q, Σ, δ, I, F ) Ensure: A replica of M 1: I = {I} 2: Q = I 3: δ′ =∅ 4: F = I if I ∩ F ̸= ∅ ∅ otherwise 5: L = I 6: while L ̸= ∅ do
7: Choose and delete P from L
8: for a∈ Σ do
9: P =∧S∈QS| δ(P, a) 10: L = L ∪ (P \ Q)
11: Q = Q ∪ P
12: Add to δ′ the transitions (P, a, S′), where S′ ∈ P
13: F = F ∪ {S ∈ P | S ∩ F ̸= ∅}
14: end for
15: end while
16: Return M′ = (Q, Σ, δ′,I, F)
V´azquez らのアルゴリズムは,NFA から到達可能な DFA を得る部分集合法と似てい
る.しかし,部分集合法では,遷移先状態が既出の状態と異なる場合には,その遷移先を そのまま,出力の新たな状態として追加するのに対して,このアルゴリズムでは,可能な 限り,既出の状態に分割させて状態遷移を追加していく.これを行うのが,Algorithm 1
の 9 行目にある分割と粗分割である.9 行目の分割は,遷移先状態をある既出の状態に含 まれるか否かで分割する操作であり,粗分割は,それらの分割を持ち寄り,より細かく 分割する操作であるとそれぞれ考えることができる. また,7 行目や 8 行目での状態や文字の選択順に制約はない. 例 7. V´azquez らのアルゴリズムの処理過程を図 2.5 に示す.ただし,図 2.5 では,青矢印 の上に示した状態と文字を選択することで,青矢印の先に示すような NFA が順に求まる ことを表しており,また,選択待ちの状態は白で,選択済みの状態は青で塗り分けた.こ こで,入力の NFA M は,Rev(M ) が到達可能な DFA であり,出力はアトミックな NFA となる. はじめに,I = {{0, 1}} となり,L = {{0, 1}} となる.1 回目の while ループで,状態 P ={0, 1} と文字 b を選択することにする.δ({0, 1}, b) = {0, 2} を,既出の状態 {0, 1} で分 割すると,{0, 1} | {0, 2} = {{0}, {2}} となる.既出の状態は {0, 1} しかないため,粗分割 の結果は,この分割の結果{{0}, {2}} と等しく,状態 P = {0, 1} からの文字 b による遷移 先として,状態{0}, {2} が求まる.続いて,文字 a を選択すると,δ({0, 1}, a) = {0, 1, 2, 3} であり,これを既出の状態で分割するとそれぞれ{0, 1} | {0, 1, 2, 3} = {{0, 1}, {2, 3}}, {0} | {0, 1, 2, 3} = {{0}, {1, 2, 3}},及び {2} | {0, 1, 2, 3} = {{2}, {0, 1, 3}} となる.よっ て,粗分割は以下のように求まる. { {0, 1}, {2, 3}}∧{{0}, {1, 2, 3}}∧{{2}, {0, 1, 3}} ={{{0, 1} ∩ {0}, {0, 1} ∩ {1, 2, 3}, {2, 3} ∩ {0}, {2, 3} ∩ {1, 2, 3}} \ {∅}}∧{{2}, {0, 1, 3}} ={{0}, {1}, {2, 3}}∧{{2}, {0, 1, 3}} ={{{0} ∩ {2}, {0} ∩ {0, 1, 3}, {1} ∩ {2}, {1} ∩ {0, 1, 3}, {2, 3} ∩ {2}, {2, 3} ∩ {0, 1, 3}} \ {∅}} ={{0}, {1}, {2}, {3}} よって,状態 P ={0, 1} からの文字 a による遷移先として,状態 {0}, {1}, {2}, {3} が求 まる. 同様にして,状態{0} 及び文字 a により状態 {1}, {2} が,状態 {0} 及び文字 b により状 態{2} がそれぞれ遷移先として求まる. 以下,状態{1} 及び文字 a により状態 {0}, {3} が,状態 {1} 及び文字 b により状態 {0}
{0,1} {1} 𝑎 𝑎, 𝑏 {2} 𝑎, 𝑏 {3} {0} 𝑎 𝑏 𝑏 𝑎, 𝑏 𝑎, 𝑏 𝑎 𝑎 {0,1} {1} 𝑎 𝑎, 𝑏 {2} 𝑎, 𝑏 {3} {0} 𝑎 {0,1} 𝑏 {2} 𝑏 {0} 0,1 , 𝑏 0,1 , 𝑎 … :選択済みの状態 :選択待ちの状態 入力 出力 {0,1} 1 3 𝑎, 𝑏 𝑎 𝑏 0 2 𝑏 𝑎, 𝑏 𝑎 図 2.5: V´azquez らのアルゴリズムの処理過程の例. が,状態{2} 及び文字 b により状態 {1}, {3} が,それぞれ遷移先として求まる.また,状 態{2} 及び文字 a,状態 {3} 及び文字 a,状態 {3} 及び文字 b による遷移先状態はそれぞ れ求まらない. 最終的に,図 2.5 の右下に示す NFA が出力される. Algorithm 1 では,入力が同一であっても,7 行目での状態の選択順や,8 行目での文 字の選択順によって,出力の NFA の状態数が変化する場合がある. 例 8. 図 2.6 は,同じ NFA M を入力とする,例 7 とは異なる Atom(M ) の導出過程である. 図 2.6 では,1 回目の while ループで,状態 P = {0, 1} と文字 a を選択している.そ れにより,状態{0, 1}, {2, 3} が遷移先として求まる.続いて,文字 b を選択して,状態 {0}, {2} が遷移先として求まる.以下同様に処理を進めると,最終的に図 2.6 の右下に示 す NFA が出力される. V´azquez らのアルゴリズムの出力の NFA の状態数について,定理 1 が成り立つ.また,
{0,1} {1} 𝑏 {2} 𝑏 {3} {0} 𝑏 𝑏 𝑎, 𝑏 𝑎, 𝑏 𝑎 𝑎 {2,3} 𝑏 𝑏 𝑎 𝑎 {0,1} {1} 𝑏 {2} 𝑏 {3} {0} {2,3} 𝑏 𝑏 𝑎 {0,1} 𝑏 {2} 𝑏 {0} {2,3} 𝑎 𝑎 {0,1} {2,3} 𝑎 𝑎 0,1 , 𝑎 0,1 , 𝑏 2,3 , 𝑏 … :選択済みの状態 :選択待ちの状態 出力 図 2.6: 図 2.5 とは異なる V´azquez らのアルゴリズムの処理過程の例. 2k− 1 となるのは,状態の 2 要素への分割が連続的に生じる場合である [8].この場合に ついては,第 3 章で説明する.
定理 1 (V´azquez, Garc´ıa, and L´opez [8]). V´azquez らのアルゴリズムの出力の NFA の状
態数は,入力の NFA の状態数を k とすると,高々2k− 1 である.
2.3
DFA
の
Brzozowski
系状態数最小化アルゴリズム
DFA M を入力として,M と等価で最小の DFA を出力する,DFA の状態数最小化ア ルゴリズムの一つを,Algorithm 2 に示す [5].すなわち,DFA M を入力として,その出 力 Det(Rev(Det(Rev(M )))) は M の最小 DFA である.本アルゴリズムは,NFA M を入 力としても,その出力 Det(Rev(Det(Rev(M )))) は M と等価で最小の DFA である.本論 文では,Algorithm 2 を Brzozowski アルゴリズムと呼ぶ. Algorithm 2 は,その 2 行目の決定性化を,アトミックな NFA を得る操作に置き換え ても,最小化アルゴリズムとして機能する [7].これを Algorithm 3 に示す.本論文で は,Algorithm 3 の 2 行目のアトミック化に V´azquez らのアルゴリズムを用いたもの, すなわち,DFA M を入力として,Det(Rev(Atom(Rev(M )))) を出力するものを,拡張 Brzozowski アルゴリズムと呼ぶ.
反転 決定性化 決定性化 反転 反転 決定性化 アトミック化 Brzozowski アルゴリズム の適用例 拡張Brzozowski アルゴリズム の適用例 𝑏 𝑎 𝑏 𝑎 𝑎 0 1 2 𝑎 𝑎 𝑏 3 4 𝑏 𝑏 𝑏 𝑎 𝑏 𝑎 𝑎 0 1 2 𝑎 𝑎 𝑏 3 4 𝑏 𝑏 {2} {1,3} 𝑏 {1,2,3} {0,1,2,3,4} 𝑎 𝑏 𝑎 𝑎, 𝑏 {0,2,4} 𝑎 𝑎 {0,1,3,4} 𝑏 𝑏 𝑎 ∅ 𝑏 𝑎, 𝑏 𝑏 𝑎 𝑎, 𝑏 𝑎 { 0,1,3,4 , 0,1,2,3,4 , {0,2,4}} 𝑏 { 1,2,3 , 0,1,2,3,4 , 0,1,3,4 , {1,3}} { 1,2,3 , 0,1,2,3,4 , 0,2,4 , {2}} 𝑏 𝑎 𝑎, 𝑏 𝑎 {{0,4}} { 1,2,3 , 1,3 } 𝑏 { 1,2,3 , 2 } {2} {1,3} 𝑎 𝑎, 𝑏 𝑎 {1,2,3} {0,4} 𝑏 𝑎 𝑎, 𝑏 𝑎 𝑏 {2} {1,3} 𝑎 𝑎, 𝑏 𝑎 {1,2,3} {0,4} 𝑏 𝑎 𝑎, 𝑏 𝑎 𝑏 {2} {1,3} 𝑏 {1,2,3} {0,1,2,3,4} 𝑎 𝑏 𝑎 𝑎, 𝑏 {0,2,4} 𝑎 𝑎 {0,1,3,4} 𝑏 𝑏 𝑎 ∅ 𝑏 𝑎, 𝑏 図 2.7: Brzozowski アルゴリズムと拡張 Brzozowski アルゴリズムの適用例.
Algorithm 2 Brzozowski アルゴリズム [5] Require: A DFA M
Ensure: Minimal DFA of M
1: Obtain M1 = Rev(M ) 2: Obtain M2 = Det(M1) 3: Obtain M3 = Rev(M2) 4: Return M′ = Det(M3) Algorithm 3 拡張 Brzozowski アルゴリズムの一般形 [7] Require: A DFA M
Ensure: Minimal DFA of M
1: Obtain M1 = Rev(M )
2: Obtain M2, an atomic NFA equivalent to M1
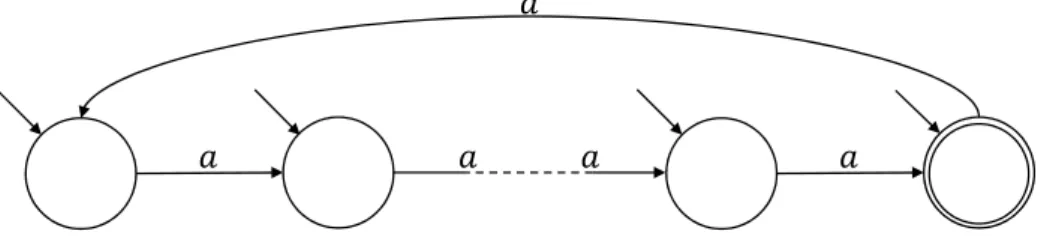
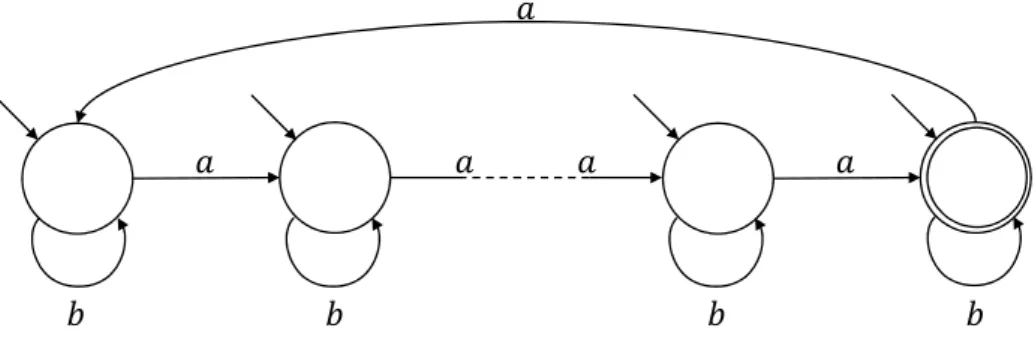
3: Obtain M3 = Rev(M2) 4: Return M′ = Det(M3) 例 9. Brzozowski アルゴリズムと拡張 Brzozowski アルゴリズムの適用例を図 2.7 示す.図 2.7 では,最上部にある DFA を両アルゴリズムの共通の入力とし,左側に Brzozowski ア ルゴリズムの適用例を,右側に拡張 Brzozowski アルゴリズムの適用例をそれぞれ示した. 最下部にある両アルゴリズムの出力は,共に状態数 3 の DFA となっており,状態名の違 いを除けば同じ DFA である. Brzozowski アルゴリズムと拡張 Brzozowski アルゴリズムの違いは,1 回目の反転の次 に,決定性のものを求めるか,アトミックなものを求めるかである.そこで,それぞれ を適用した後の状態数,すなわち 2 回目の反転の前の状態数に着目する. 決定性のものを求める場合,入力の NFA M の状態数を k とすると,出力 Det(M ) の 状態数は高々2kである.2kとなるのは,出力 Det(M ) の状態が,入力 M の各状態の組 み合わせを網羅する,図 2.8 に示すような場合である.対して,V´azquez らのアルゴリズ ムを用いてアトミックなものを求める場合,入力の NFA M の状態数を k とすると,出 力 Atom(M ) の状態数は高々2k − 2 である.ここで,V´azquez らのアルゴリズムの出力 の状態数は高々2k− 1 であるが,DFA を反転したものを入力とすると,2k − 1 となる場
決定性化 入力 出力 0 𝑐 𝑎, 𝑏 1 𝑎 𝑎 2 𝑎, 𝑏 {0,1,2} {0,1} {0,2} {1,2} {1} {0} {2} ∅ 𝑎 𝑎 𝑎 𝑎 𝑎 𝑐 𝑐 𝑐 𝑐 𝑐 𝑎, 𝑏, 𝑐 𝑎, 𝑏, 𝑐 𝑏 𝑏 𝑏 𝑏 𝑏 𝑎 𝑏 𝑐 図 2.8: 決定性化の出力の状態数が最大となる例. 合は存在しない.これは第 3 章で示す. したがって,拡張 Brzozowski アルゴリズムでは,Brzozowski アルゴリズムに対して, 途中の NFA の状態数を大きく削減できる可能性があり,両アルゴリズムの最悪時計算量 を比べると,Brzozowski アルゴリズムは指数時間であるのに対して,拡張 Brzozowski ア ルゴリズムは多項式時間である [8].
第
3
章
V´
azquez
らのアルゴリズムの出力の状態数の解析
定理 1 により,V´azquez らのアルゴリズムの出力の NFA の状態数は,入力の NFA の
状態数を k とすると,高々2k− 1 である.また,2k − 1 となるのは,状態の 2 要素への 分割が連続的に生じる場合である [8].[8] では,出力の状態数が最大となる入力例につい てや,到達可能な DFA を反転したものが入力の場合に,出力の状態数がどうなるかにつ いては述べられていなかった.そこで,本章では,任意の NFA を入力とする場合と,到 達可能な DFA を反転したものを入力とする場合に分けて,その出力の状態数の最大値と 最小値,及び出力の状態数が最大や最小となる入力例について述べる. 本章の以下の議論において,特に断らない限り,V´azquez らのアルゴリズムの入力の NFA を M = (Q, Σ, δ, I, F ) とし,出力の NFA を M′ = (Q′, Σ, δ′, I′, F′) とする.また, |Q| = k とする.
3.1
任意の
NFA
を入力とする場合の出力の最大状態数
V´azquez らのアルゴリズムの出力の状態数|Q′| が 2k − 1 となる場合について,[8] の指 摘を言い換えると観察 1 のようになる. 観察 1. V´azquez らのアルゴリズムの出力の状態数|Q′| が 2k − 1 となるのは,入力の状 態集合 Q を,Q の空でない真部分集合 R⊊ Q 及び S = Q \ R の 2 要素に分割し,それら の部分集合をこれ以上分割ができない単集合になるまで同様に 2 分割する操作を繰り返 すときの,分割前と分割後の全ての部分集合と Q の集合に,出力の状態集合 Q′が等しい 場合である.{0,1,2,3,4} {0} 𝑏 𝑎 {1,2,3,4} 𝑎 {4} {1,2,3} 𝑏 {2,3} {1} 𝑏 {2} 𝑏 𝑎 {3} 𝑏 𝑎, 𝑏 𝑎 𝑏 𝑏 𝑏 𝑏 𝑎 𝑎 𝑎 𝑎 𝑎 𝑏 𝑏 𝑏 𝑎 𝑏 入力 出力 𝑏 𝑎 𝑏 𝑎 𝑏 0 1 2 𝑎 𝑏 𝑎 3 4 Vázquezらの アルゴリズム 図 3.1: V´azquez らのアルゴリズムの出力の状態数が 2k− 1 となる具体例. 例 10. V´azquez らのアルゴリズムの出力の状態数が 2k− 1 となる具体例を図 3.1 に示す. この例は,k = 5 であるが,確かに出力 Atom(M ) の状態数は 2k− 1 = 9 である.観察 1 で述べたように,出力の状態集合 Q′は,{0, 1, 2, 3, 4},{0, 1, 2, 3, 4} を 2 分割した {0} 及 び{1, 2, 3, 4},{1, 2, 3, 4} を 2 分割した {1, 2, 3} 及び {4},{1, 2, 3} を 2 分割した {1} 及び {2, 3},{2, 3} を 2 分割した {2} 及び {3} を元とする, Q′ ={{0, 1, 2, 3, 4}, {0}, {1, 2, 3, 4}, {1, 2, 3}, {4}, {1}, {2, 3}, {2}, {3}} となっている. また,結果として観察 1 に示すような状態が得られれば良く,各状態から分割先の状 態への遷移がある必要はないこともわかる.例えば,図 3.1 では状態{1, 2, 3, 4} から状態 {1, 2, 3} に向かう遷移は存在しない. V´azquez らのアルゴリズムの出力の状態数|Q′| が 2k − 1 となる入力に関して,補題 1 が成り立つ. 補題 1. V´azquez らのアルゴリズムの出力の状態数|Q′| が 2k − 1 となるためには,その 入力の状態全てが初期状態,すなわち Q = I である必要がある.
証明. 補題 1 の対偶を示す. 入力の NFA M の状態集合 Q に初期状態でない状態も含まれるとき,初期状態でない 状態の集合を R = Q\ I ̸= ∅ とする. NFA M に V´azquez らのアルゴリズムを適用する と,出力の初期状態は状態 I となる.本アルゴリズムの処理過程で Algorithm 1 の 9 行 目が δ(P, a) = Q となった場合,Q は,既出の状態 I によって状態 I と状態 R に分割さ れるため,状態 Q が出力の状態として追加されることはない.観察 1 より,出力の状態 数|Q′| が 2k − 1 となるためには,Q ∈ Q′の必要があるが,状態 Q が出力の状態として 追加されることはないから,出力の状態数|Q′| は高々2k − 2 となり,2k − 1 となること はない. 3.1.1 |Σ| = 1 のとき |Σ| = 1 のとき,V´azquez らのアルゴリズムの出力の状態数について,定理 2 が成り 立つ. 定理 2. |Σ| = 1, k ≥ 2 のとき,V´azquez らのアルゴリズムの出力の状態数 |Q′| について, |Q′| ≤ 2k − 2 が成り立つ.またこの上界は厳密である. 証明. はじめに,出力の状態数|Q′| について,|Q′| ≤ 2k − 2 が成り立つことを示す.定 理 1 により,V´azquez らのアルゴリズムの出力の状態数|Q′| は高々2k − 1 であるから, |Σ| = 1, k ≥ 2 のとき,本アルゴリズムの出力の状態数 |Q′| が 2k − 1 となる入力 M が存 在すると仮定し,Σ ={a} とする.補題 1 により,M はその状態全てが初期状態,すな わち Q = I である.よって,M に本アルゴリズムを適用すると,状態 Q が出力の初期状 態として求まる. Q からの遷移先 δ(Q, a) が Q と等しい,すなわち δ(Q, a) = Q のとき,新たな状態は追加 されず,アルゴリズムは停止する.この場合の出力の状態数|Q′| は 1 であり,|Q′| = 2k−1 という仮定に矛盾する. Q からの遷移先 δ(Q, a) が Q と異なる,すなわち δ(Q, a) ̸= Q のとき,新たな状態 B = δ(Q, a) が追加される.ここで,状態 B には M の全ての状態からの遷移先状態が含 まれており,ゆえに以後の処理過程のある状態 C からの遷移先 δ(C, a) が,状態 B に含 まれない状態 D = Q\ B を含むことはない(∀C ⊆ Q, D ⊈ δ(C, a)).よって,状態 D が
図 3.2: |Σ| = 1 のとき,V´azquez らのアルゴリズムの出力の状態数が 2k − 2 となる入 力例. 新たな状態として追加されることはなく,アルゴリズムは停止する.観察 1 より,出力 の状態集合 Q′には状態 D も含まれるはずであり,矛盾が生じる. したがって,|Σ| = 1, k ≥ 2 のとき,V´azquez らのアルゴリズムの出力の状態数 |Q′| が 2k− 1 となる入力は存在せず,|Q′| は高々2k − 2 となる. 次に,上界が厳密であることを示す.V´azquez らのアルゴリズムの出力の状態数が 2k−2 となる入力例を,図 3.2 に示し,この NFA を M とする.ただし,状態の選択順は,含ま れる M の状態が多い順とする.M に本アルゴリズムを適用すると,状態{0, 1, ..., k − 2} が出力の初期状態として求まる.続いて,状態{0, 1, 2, ..., k − 2} から文字 a による遷移 先として状態{1, 2, .., k − 2}, {k} が追加される.状態 {1, 2, .., k − 2} と {k} を比較して, 含まれる M の状態が多い方として状態{1, 2, .., k − 2} を選択すると,文字 a による遷移 先として状態{2, .., k − 2} が追加される.同様にして,状態の選択と新たな状態の追加 を繰り返すと,状態{k − 1} が未選択の状態として残る.状態 {k − 1} を選択すると,状 態{0} が新たな状態として追加される.同様にして,状態 {1}, {2}, ..., {k − 3} が追加さ れる.以上のようにして,観察 1 で述べた状態集合から入力 M の状態集合 Q を除いたも のを状態集合として持つ出力が得られる. 例 11. |Σ| = 1 のとき,V´azquez らのアルゴリズムの出力の状態数が 2k − 2 となる具体 例を図 3.3 に示す. 図 3.2 で示した入力例は,k ≤ 4 のときは,状態の選択順によらず,出力の状態数が 2k− 2 となるものである.
{0,1,2,3} 𝑎 {1,2,3} {4} 𝑎 {0,1,2,3} 𝑎 {1,2,3} {2,3} {4} 𝑎 𝑎 𝑎 {0,1,2,3} {0} 𝑎 {1,2,3} {2,3} {1} 𝑎 {4} 𝑎 𝑎 𝑎 𝑎 𝑎 {3} {2} 𝑎 𝑎 𝑎 𝑎 {0,1,2,3} 𝑎 {1,2,3} {2,3} {4} 𝑎 𝑎 𝑎 𝑎 {3} 𝑎 {0,1,2,3} 𝑎 {1,2,3} {2,3} {4} 𝑎 𝑎 𝑎 𝑎 {3} 𝑎 𝑎 {0,1,2,3} {0} 𝑎 {1,2,3} {2,3} {4} 𝑎 𝑎 𝑎 𝑎 𝑎 {3} 𝑎 𝑎 {0,1,2,3} {0} 𝑎 {1,2,3} {2,3} {1} 𝑎 {4} 𝑎 𝑎 𝑎 𝑎 𝑎 {3} 𝑎 𝑎 {0,1,2,3} {0} 𝑎 {1,2,3} {2,3} {1} 𝑎 {4} 𝑎 𝑎 𝑎 𝑎 𝑎 {3} {2} 𝑎 𝑎 𝑎 入力 2 1 4 0 3 1,2,3 2,3 0,1,2,3 出力 3 𝑎 𝑎 0 1 2 𝑎 3 𝑎 𝑎 4 {0,1,2,3} 図 3.3: |Σ| = 1 のとき,V´azquez らのアルゴリズムの出力の状態数が 2k − 2 となる具 体例. 3.1.2 |Σ| ≥ 2 のとき |Σ| ≥ 2 のとき,V´azquez らのアルゴリズムの出力の状態数について,定理 3 が成り 立つ. 定理 3. |Σ| ≥ 2 のとき,V´azquez らのアルゴリズムの出力の状態数 |Q′| について,|Q′| ≤ 2k− 1 が成り立つ.またこの上界は厳密である. 証明. はじめに,出力の状態数|Q′| について,|Q′| ≤ 2k − 1 が成り立つことは,定理 1 にある.ここでは,この上界が厳密であることを示す.V´azquez らのアルゴリズムの出 力の状態数が 2k− 1 となる入力例を,図 3.4 に示し,この NFA を M とする.ただし,状 態の選択順は,含まれる M の状態が多い順とし,文字の選択は a, b の順とする.M に本 アルゴリズムを適用すると,状態{0, 1, 2, ..., k − 1} が出力の初期状態として求まる.続 いて,状態{0, 1, 2, ..., k − 1} から文字 a による遷移先として状態 {1, 2, .., k − 1} が追加 される.また,状態{0, 1, 2, ..., k − 1} から文字 b による遷移先として状態 {0} が追加さ れる.状態{1, 2, .., k − 1} 及び {0} を比較して,含まれる M の状態が多い方として状態 {1, 2, .., k − 1} を選択すると,文字 a による遷移先として状態 {2, .., k − 1} が,文字 b に よる遷移先として状態{1} がそれぞれ追加される.同様にして,選択した状態 q0の,部
図 3.4: |Σ| = 2 のとき,V´azquez らのアルゴリズムの出力の状態数が 2k − 1 となる入 力例. 分集合である単集合 q1とそれ以外 q2 = q0\ q1への 2 分割と,それら状態の追加が繰り返 される.以上のようにして,観察 1 で述べた状態集合を持つ出力が得られる. |Σ| ≥ 3 のときは,文字 a による遷移は図 3.4 の a による遷移と同じとし,a 以外の文 字による遷移は図 3.4 の b による遷移と同じとして,同様に証明できる. 例 12. |Σ| = 2 のとき,V´azquez らのアルゴリズムの出力の状態数が 2k − 1 となる具体 例を図 3.5 に示す.
3.2
到達可能な
DFA
を反転したものを入力とする場合の出力の最大状
態数
到達可能な DFA を反転したものを入力とする場合には,出力の状態数にも制約が生じ る.この場合の V´azquez らのアルゴリズムの出力の状態数について,定理 4 が成り立つ. 定理 4. 到達可能な DFA を反転したものを入力とする場合,入力の状態数 k≥ 2 のとき, V´azquez らのアルゴリズムの出力の状態数|Q′| は,高々2k − 2 である. 証明. 定理 1 により,V´azquez らのアルゴリズムの出力の状態数|Q′| は,どんな NFA を入 力としても,高々2k−1である.そこで,到達可能なDFAを反転したものを入力とし,k ≥ 2 のときに,本アルゴリズムの出力の状態数|Q′| が 2k − 1 となる入力 M = (Q, Σ, δ, I, F ) が存在すると仮定する.補題 1 により,M はその状態全てが初期状態,すなわち Q = I である.よって,M に本アルゴリズムを適用すると,状態 Q が出力の初期状態として求 まる.{0,1,2,3,4} {0} 𝑏 𝑎, 𝑏 {1,2,3,4} 𝑎, 𝑏 {2,3,4} {1} 𝑏 {0,1,2,3,4} {0} 𝑏 𝑎, 𝑏 {1,2,3,4} 𝑎 {2, 3,4} {0,1,2,3,4} {0} 𝑏 𝑎, 𝑏 {1,2,3,4} {0,1,2,3,4} 𝑎 {1,2,3,4} {0,1,2,3,4} {0,1,2,3,4} {0} 𝑏 𝑎, 𝑏 {1,2,3,4} 𝑎, 𝑏 {2,3,4} {1} 𝑏 𝑎 {3,4} {0,1,2,3,4} {0} 𝑏 𝑎, 𝑏 {1,2,3,4} 𝑎, 𝑏 {2,3,4} {1} 𝑏 {2} 𝑏 𝑎, 𝑏 {3,4} {0,1,2,3,4} {0} 𝑏 𝑎, 𝑏 {1,2,3,4} 𝑎, 𝑏 {2,3,4} {1} 𝑏 {2} 𝑏 𝑎, 𝑏 {3,4} 𝑎, 𝑏 {4} {3} 𝑏 {0,1,2,3,4} {0} 𝑏 𝑎, 𝑏 {1,2,3,4} 𝑎, 𝑏 {2,3,4} {1} 𝑏 {2} 𝑏 𝑎, 𝑏 {3,4} 𝑎 {4} {0,1,2,3,4} {0} 𝑏 𝑎, 𝑏 {1,2,3,4} 𝑎, 𝑏 {2,3,4} {1} 𝑏 {2} 𝑏 𝑎, 𝑏 {3,4} 𝑎, 𝑏 {4} {3} 𝑏 𝑎 𝑎 𝑎 𝑎 𝑏 𝑎, 𝑏 𝑏 𝑏 𝑏 𝑏 𝑎 𝑏 𝑎 𝑏 0 1 2 𝑎 𝑏 𝑎 𝑎, 𝑏 3 4 入力 2,3,4 , 𝑎 1,2,3,4 , 𝑏 3,4 , 𝑏 3,4 , 𝑎 … 2,3,4 , 𝑏 1,2,3,4 , 𝑎 0,1,2,3,4 , 𝑏 0,1,2,3,4 , 𝑎 出力 図 3.5: |Σ| = 2 のとき,V´azquez らのアルゴリズムの出力の状態数が 2k − 1 となる具 体例.
ここで,Rev(M ) = (Q, Σ, δR, F, I) は到達可能な DFA であるから,Rev(M ) の状態全
てが,各文字による状態遷移元である(∀q ∈ Q, ∀a ∈ Σ, ∃p ∈ Q, δR(q, a) = p).ゆえに, M の状態全てが,各文字による状態遷移先である(∀q ∈ Q, ∀a ∈ Σ, ∃p ∈ Q, δ(p, a) = q). よって,出力の初期状態 Q からの遷移先は,どの文字によっても状態 Q となり(∀a ∈ Σ, δ(Q, a) = Q),新たな状態は追加されずアルゴリズムは停止する.この場合の出力の 状態数|Q′| は 1 であり,|Q′| = 2k − 1 という仮定に矛盾する. したがって,到達可能な DFA を反転したものを入力とし,k ≥ 2 のとき,V´azquez ら のアルゴリズムの出力の状態数|Q′| が 2k − 1 となる入力は存在せず,|Q′| は高々2k − 2 となる. 到達可能な DFA を反転したものを入力とし,V´azquez らのアルゴリズムの出力の状態 数|Q′| が 2k − 2 となる場合について,観察 2 が言える. 観察 2. 到達可能な DFA を反転したものを入力とし,V´azquez らのアルゴリズムの出力 の状態数|Q′| が 2k − 2 となる入力 M が存在するならばそれは,入力の状態集合 Q を,Q
の空でない真部分集合 R⊊ Q 及び S = Q \ R の 2 要素に分割し,それらの部分集合をこ れ以上分割ができない単集合になるまで同様に 2 分割する操作を繰り返すときの,分割 前と分割後の全ての部分集合の(Q を含まない)集合に,出力の状態集合 Q′が等しい場 合である. 証明. 到達可能な DFA を反転したものを入力とし,V´azquez らのアルゴリズムの出力の 状態数|Q′| が 2k − 2 となる出力の状態集合 Q′として考えられるのは,観察 2 で述べたも のか,観察 1 で述べたものから状態 Q 以外を除いたものの 2 通りである. 後者について,定理 4 の証明にあるように,本アルゴリズムで状態 Q が出力の初期状 態として求まる場合の,出力の状態数|Q′| は 1 である.また,補題 1 の証明にあるよう に,初期状態としてでなく,状態 Q を後から追加することはできない.よって,後者の ような状態集合 Q′をもつ出力は存在しない. 例 13. 到達可能な DFA を反転したものを入力とし,V´azquez らのアルゴリズムの出力 の状態数が 2k− 2 となる具体例を図 3.6 に示す.この例は,k = 4 であるが,確かに出 力 Atom(M ) の状態数は 2k− 2 = 6 である.観察 2 で述べたように,出力の状態集合 Q′ は,状態{0, 1, 2, 3} を 2 分割した {0, 1}, {2, 3},状態 {0, 1} を 2 分割した {0}, {1},状態 {2, 3} を 2 分割した {2}, {3} を元とする, Q′ ={{0, 1}, {2, 3}, {0}, {1}, {2}, {3}} となっている. また,結果として観察 2 に示すような状態が得られれば良く,各状態から分割先の状 態への遷移がある必要はないこともわかる.例えば,図 3.6 では状態{0, 1} から {1} に向 かう遷移,状態{2, 3} から {2} に向かう遷移は,それぞれ存在しない. 3.2.1 |Σ| = 1 のとき 到達可能な DFA を反転したものを入力とし,|Σ| = 1 のとき,V´azquez らのアルゴリ ズムの出力の状態数について,定理 5 が成り立つ.
{0,1} {1} 𝑏 {2} 𝑏 {3} {0} 𝑏 𝑏 𝑎, 𝑏 𝑎, 𝑏 𝑎 𝑎 {2,3} 𝑏 𝑏 𝑎 𝑎 1 3 𝑎, 𝑏 𝑎 𝑏 0 2 𝑏 𝑎, 𝑏 𝑎 入力 出力 Vázquezらの アルゴリズム 図 3.6: 到達可能な DFA を反転したものを入力とし,V´azquez らのアルゴリズムの出力 の状態数が 2k− 2 となる具体例. 図 3.7: 到達可能な DFA を反転したもので,|Σ| = 1 のとき,V´azquez らのアルゴリズム の出力の状態数が 2k− 2 となる入力例. 定理 5. 到達可能な DFA を反転したものを入力とし,|Σ| = 1, k ≥ 2 のとき,V´azquez ら のアルゴリズムの出力の状態数|Q′| について,|Q′| ≤ 2k − 2 が成り立つ.またこの上界 は厳密である. 証明. はじめに,出力の状態数|Q′| について,|Q′| ≤ 2k − 2 が成り立つことは,定理 4 にある.ここでは,この上界が厳密であることを示す.到達可能な DFA を反転したもの で,V´azquez らのアルゴリズムの出力の状態数が 2k− 2 となる入力例を,図 3.7 に示し,
この NFA を M とする.M を反転したもの Rev(M ) は,到達可能な DFA であり,入力 条件を満たしている.ただし,状態の選択順は,含まれる M の状態が多い順とする.こ の M は,図 3.2 に示すものと同じであり,定理 2 の証明に示したように,M に V´azquez
らのアルゴリズムを適用した出力の状態数は,2k− 2 になる.
例 14. 到達可能な DFA を反転したものを入力とし,|Σ| = 1 のとき,V´azquez らのアル
図 3.8: 到達可能な DFA を反転したもので,|Σ| = 1, k = 5 のとき,状態の選択順によら ず V´azquez らのアルゴリズムの出力の状態数が 2k− 2 = 8 となる入力例. 図 3.7 で示した入力例は,k ≤ 4 のときは,状態の選択順によらず,その出力の状態数 は 2k− 2 となる. 図 3.7 に対して,k = 5 で状態の選択順によらず,出力の状態数が 2k− 2 = 8 となる入 力例を,図 3.8 に示す.また,図 3.8 の NFA に V´azquez らのアルゴリズムを適用した場 合に起こりうる,全ての処理過程を図 3.9 に示す. 3.2.2 |Σ| ≥ 2 のとき 到達可能な DFA を反転したものを入力とし,|Σ| ≥ 2 のとき,V´azquez らのアルゴリ ズムの出力の状態数について,定理 6 が成り立つ. 定理 6. 到達可能な DFA を反転したものを入力とし,|Σ| ≥ 2, k ≥ 2 のとき,V´azquez ら のアルゴリズムの出力の状態数|Q′| について,|Q′| ≤ 2k − 2 が成り立つ.またこの上界 は厳密である. 証明. はじめに,出力の状態数|Q′| について,|Q′| ≤ 2k − 2 が成り立つことは,定理 4 に ある.ここでは,この上界が厳密であることを示す.到達可能な DFA を反転したもので, V´azquez らのアルゴリズムの出力の状態数が 2k−2 となる入力例を,図 3.10 に示し,この
NFA を M とする.M を反転したもの Rev(M ) は,到達可能な DFA であり,入力条件を 満たしている.ただし,状態の選択順は,含まれる M の状態が多い順とし,文字の選択 順は任意とする.M に本アルゴリズムを適用すると,状態{0, 1, 2, ..., k −2} が出力の初期 状態として求まる.文字の選択は a, b の順とすると,状態{0, 1, 2, ..., k − 2} から文字 a に よる遷移先として状態{1, 2, .., k −2}, {k −1} が追加される.また,状態 {0, 1, 2, ..., k −2} から文字 b による遷移先として状態{0} が追加される.状態 {1, 2, .., k − 2},{k − 1},及 び{0} を比較して,含まれる M の状態が多い状態 {1, 2, .., k − 2} を選択すると,文字 a による遷移先として状態{2, .., k − 2} が,文字 b による遷移先として状態 {1} がそれぞ
図 3.9: 図 3.8 の NFA に V´azquez らのアルゴリズムを適用した場合に起こりうる,全て の処理過程.
図 3.10: 到達可能な DFA を反転したもので,|Σ| = 2 のとき,V´azquez らのアルゴリズ ムの出力の状態数が 2k− 2 となる入力例. れ追加される.同様にして,選択した状態 q0の,部分集合である単集合 q1とそれ以外の q2 = q0\ q1への 2 分割と,それら状態の追加が繰り返される.以上のようにして,観察 2 で述べた状態集合を持つ出力が得られる. |Σ| ≥ 3 のときは,文字 a による遷移は図 3.10 の a による遷移と同じとし,a 以外の文 字による遷移は図 3.10 の b による遷移と同じとして,同様に証明できる. 例 15. 到達可能な DFA を反転したものを入力とし,|Σ| = 2 のとき,V´azquez らのアル ゴリズムの出力の状態数が 2k− 2 となる具体例を図 3.11 に示す. 図 3.2 で示した入力例は,k ≤ 4 のときは,状態の選択順によらず,その出力の状態数 は 2k− 2 となる.
3.3
V´
azquez
らのアルゴリズムの出力の状態数
V´azquez らのアルゴリズムの出力の最大状態数についてまとめると,表 3.1 のようにな る.表 3.1 でマスが 2 段となっているところは,上段が,出力の状態数の最大値を表し, 下段が,出力の状態数が最大となる(現在見つかっている)入力例の,本アルゴリズム 適用時の状態や文字の選択順の指定の有無を表す. また,V´azquez らのアルゴリズムの出力の最小状態数について,定理 7 が成り立つ. 定理 7. 入力が任意の NFA であっても,到達可能な DFA を反転したものであっても, |Σ| ≥ 1, k ≥ 1 のとき,V´azquez らのアルゴリズムの出力の状態数 |Q′| について,|Q′| ≥ 1 が成り立つ.またこの下界は厳密である.{0,1,2,3} {0,1,2,3} 𝑎 {1,2,3} {4} 𝑎 {0,1,2,3} {0} 𝑎 {1,2,3} {4} 𝑎, 𝑏 𝑏 𝑎 𝑎 0 1 2 𝑎 3 𝑎 𝑏 𝑏 𝑏 𝑏 𝑎 4 𝑏 {0,1,2,3} {0} 𝑎 {1,2,3} {2,3} {4} 𝑎 𝑎, 𝑏 𝑎 𝑏 {0,1,2,3} {0} 𝑎 {1,2,3} {2,3} {1} {4} 𝑎, 𝑏 𝑎, 𝑏 𝑎 𝑏 𝑏 {0,1,2,3} {0} 𝑎 {1,2,3} {2,3} {1} {4} 𝑎, 𝑏 𝑎, 𝑏 𝑎 𝑎 {3} 𝑎 𝑏 𝑏 {0,1,2,3} {0} 𝑎 {1,2,3} {2,3} {1} {4} 𝑎, 𝑏 𝑎, 𝑏 𝑎 𝑎 {3} {2} 𝑎, 𝑏 𝑏 𝑏 𝑏 {0,1,2,3} {0} 𝑎 {1,2,3} {2,3} {1} 𝑎 {4} 𝑎, 𝑏 𝑎, 𝑏 𝑎 𝑎 𝑎 {3} {2} 𝑎 𝑎 𝑎, 𝑏 𝑎 𝑏 𝑏 𝑏 𝑏 𝑏 𝑏 𝑏 𝑏 入力 … 1,2,3 , 𝑎 2,3 , 𝑏 2,3 , 𝑎 1,2,3 , 𝑏 0,1,2,3 , 𝑏 0,1,2,3 , 𝑎 出力 図 3.11: 到達可能な DFA を反転したものを入力とし,|Σ| = 2 のとき,V´azquez らのア ルゴリズムの出力の状態数が 2k− 2 となる具体例. 表 3.1: V´azquez らのアルゴリズムの出力の最大状態数 入力 M の 任意の入力 M 到達可能な DFA を反転した入力 M 状態数 k |Σ| = 1 |Σ| ≥ 2 |Σ| ≥ 1 1 1 1 1 2≤ k ≤ 5 2k− 2 2k− 1 2k− 2 (選択順指定無)(選択順指定有) (選択順指定無) k≥ 6 2k− 2 2k− 1 2k− 2 (選択順指定有)(選択順指定有) (選択順指定有)
図 3.12: |Σ| = 1 のとき,V´azquez らのアルゴリズムの出力の状態数が 1 となる入力例. 証明. |Σ| = 1 のとき,V´azquez らのアルゴリズムの出力の状態数が 1 となる入力例を,図 3.12 に示し,この NFA を M1とする.ここで,M1を反転した Rev(M1) は,到達可能な DFA である.また,M1に本アルゴリズムを適用する場合の状態の選択順は一意である. M1に本アルゴリズムを適用すると,M1の状態集合 Q が出力の初期状態として求まる. 状態 Q から文字 a による遷移先は状態 Q であり,新たな状態は生成されない.よって, アルゴリズムは終了し,出力の NFA はその状態集合 Q′ ={Q},すなわち |Q′| = 1 であ るものとなる. |Σ| = 2 のとき,V´azquez らのアルゴリズムの出力の状態数が 1 となる入力例を,図 3.13 に示し,この NFA を M2とする.ここで,M2を反転した Rev(M2) は,到達可能な DFA である.また,M2に本アルゴリズムを適用する場合の状態の選択順は一意であり, 文字の選択順は任意とする. M2に本アルゴリズムを適用すると,M2の状態集合 Q が出力の初期状態として求まる. 状態 Q から文字 a による遷移先は状態 Q であり,新たな状態は生成されない.また,状 態 Q から文字 b による遷移先も状態 Q であり,新たな状態は生成されない.よって,ア ルゴリズムは終了し,出力の NFA はその状態集合 Q′ ={Q},すなわち |Q′| = 1 である ものとなる. |Σ| ≥ 3 のときは,文字 a による遷移は図 3.13 の a による遷移と同じとし,a 以外の文 字による遷移は図 3.13 の b による遷移と同じとして,同様に証明できる 例 16. |Σ| = 1 のとき,V´azquez らのアルゴリズムの出力の状態数が 1 となる具体例を図 3.14 に示す.同様に,|Σ| = 2 のとき,V´azquez らのアルゴリズムの出力の状態数が 1 と なる具体例を図 3.15 に示す.
図 3.13: |Σ| = 2 のとき,V´azquez らのアルゴリズムの出力の状態数が 1 となる入力例. {0,1,2,3,4} 0,1,2,3,4 {0,1,2,3,4} 入力 出力 図 3.14: |Σ| = 1 のとき,V´azquez らのアルゴリズムの出力の状態数が 1 となる具体例. {0,1,2,3,4} {0,1,2,3,4} 0,1,2,3,4 , 𝑎 入力 出力 {0,1,2,3,4} 0,1,2,3,4 , 𝑏 図 3.15: |Σ| = 2 のとき,V´azquez らのアルゴリズムの出力の状態数が 1 となる具体例.
第
4
章
V´
azquez
らのアルゴリズムの出力の平均状態数の
削減
Brzozowski 系アルゴリズムでは,2 番目の操作(決定性化及びアトミック化)の出力 の状態数が,全体の計算量に影響する.そこで,本章では,V´azquez らのアルゴリズムで 任意性のある,状態と文字の選択順の工夫による,出力の平均状態数の削減の検討とそ の実験結果を述べる.また,拡張 Brzozowski アルゴリズムを用いることで,Brzozowski アルゴリズムの場合よりも,2 番目の操作の出力の状態数を削減できることを,実験的に 確認した結果も示す.4.1
出力の平均状態数を削減するため検討
V´azquez らが提案した Algorithm 1 では,7 行目の状態 P の選択順及び 8 行目の文字 a の選択順は任意であった.そこで,それらの選択順を工夫することで,出力の平均状態 数を削減できないかと考えた. 図 4.1 は,図 2.5 及び 2.6 と同じ例であるが,文字の選択順で出力の状態数が異なる V´azquez らのアルゴリズムの適用例である.図 4.1 の上部に示した例は,下部に示した例 に対して,状態{2, 3} の分だけ状態が多くなっており,下部の例では,上部の例の状態 {2, 3} の役割を,状態 {2}, {3} で担っているといえる.そこで,状態 {2, 3}, {2}, 及び {3} が出現した様子を観察すると,上部の例では,状態{2, 3} の後に状態 {2}, {3} が出現し ているのに対して,下部の例では,先に状態{2} ⊂ {2, 3} が出現することで,状態 {2, 3} への遷移に相当するものが,状態{2}, {3} に分割遷移されたといえる.以上の観察から,{0,1} {0,1} 𝑏 {2} 𝑏 {0} {0,1} {2,3} 𝑎 𝑎 {0,1} {1} 𝑎 𝑎, 𝑏 {2} 𝑎, 𝑏 {3} {0} 𝑎 {0,1} {1} 𝑏 {2} 𝑏 {3} {0} 𝑏 𝑏 𝑎, 𝑏 𝑎, 𝑏 𝑎 𝑎 {2,3} 𝑏 𝑏 𝑎 𝑎 {0,1} 𝑏 {2} 𝑏 {0} {2,3} 𝑎 𝑎 {0,1} {1} 𝑎 𝑎, 𝑏 {2} 𝑎, 𝑏 {3} {0} 𝑎 𝑏 𝑏 𝑎, 𝑏 𝑎, 𝑏 𝑎 𝑎 𝛿 0,1 , 𝑎 = {0,1,2,3} 𝛿 0,1 , 𝑏 = {0,2} 状態{2,3}が {2}と{3}に分割 2 ⊂ {2,3} 𝛿 0,1 , 𝑏 = {0,2} 𝛿 0,1 , 𝑎 = {0,1,2,3} … … 状態{2,3}が余分 :選択済みの状態 :選択待ちの状態 入力 1 3 𝑎, 𝑏 𝑎 𝑏 0 2 𝑏 𝑎, 𝑏 𝑎 出力 図 4.1: 文字の選択順で出力の状態数が異なる,V´azquez らのアルゴリズムの適用例. サイズの小さい状態を先に出現させれば,出力の状態数を小さくできる可能性が高いと 考えた.すなわち,Algorithm 1 のP の元を,よりサイズの小さい状態にできればよいと 考えた. 続いて,Algorithm 1 のP の元を,よりサイズの小さい状態にするための方策につい て,状態 P や文字 a の選択順を変えることで制御できるのは δ(P, a) であるが,δ(P, a) の サイズが小さいほど,P に追加される状態が小さくなる可能性が高いと考えた.これは, 次の分割の対比から予想できる. {0, 1} | {0, 1, 2} ={{0, 1}, {2}} {0, 1} | {0, 1, 2, 3, 4, 5} ={{0, 1}, {2, 3, 4, 5}} 最後に,δ(P, a) のサイズを小さくするための方策は,状態 P の選択順については,遷 移元である状態 P のサイズが小さければ,遷移先である δ(P, a) のサイズも小さくなる可 能性が高いと考え,サイズの小さい状態 P を優先的に選択する戦略を考えた.また,文 字 a の選択順については,a∈ Σ である全ての文字 a について δ(P, a) をあらかじめ求め ておいて,その δ(P, a) のサイズが小さくなる文字 a を優先的に選択する戦略を考えた.
4.2
実験
4.2
:
Brzozowski
系アルゴリズムの中間状態数の比較
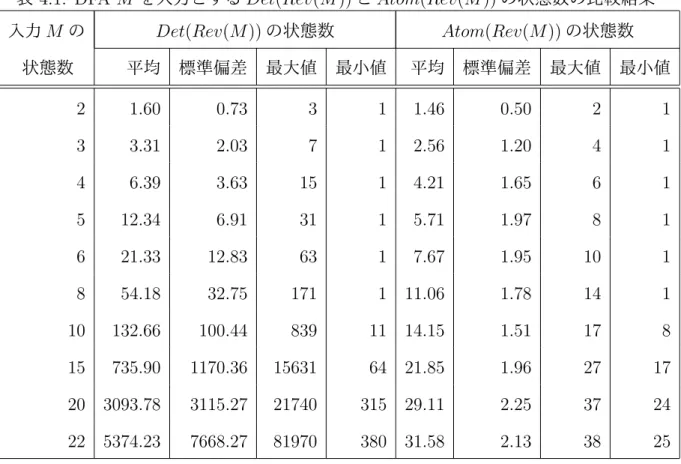
Brzozowski アルゴリズム及び拡張 Brzozowski アルゴリズムの計算量に違いをもたらす 可能性のある,両アルゴリズムの 2 番目の操作の出力の状態数,すなわち入力の DFA M に対して,Det(Rev(M )) と Atom(Rev(M )) の状態数を実験的に比較した.アルファベッ トサイズ|Σ| = 2 の到達可能な DFA を,各状態数につき 200 個ランダムに生成して用い た比較結果を表 4.1 に示す. ただし,実装には Python 2.7.16 を用い,到達可能な DFA のランダムな生成,反転,及 び決定性化は,形式言語操作モジュール FAdo [9] を用いて実現した.V´azquez らのアル ゴリズムの実装では,Algorithm 1 の選択待ちの状態を保持する変数L を set 型とし,新 たな状態の集合を update 関数でL に追加し,L から pop 関数で取り出されたものを, そのまま選択された状態 P として用いた.また,アルファベット Σ も set 型とし,Σ か ら for 文で取り出されたものを,そのまま選択された文字 a として用いた.すなわち,状 態 P や文字 a の選択順は,Python 本体の上記要素の実装によった.ただし,文字につい ては,実装上は Σ = {0, 1} であり,その選択順は常に 1, 0 の順であった.特に断りがな い限り,本実装を本論文の他の実験でも用いるものとする.表 4.1 より,拡張 Brzozowski アルゴリズムの Atom(Rev(M )) の状態数は,Brzozowski アルゴリズムの Det(Rev(M )) の状態数に比べて,最悪時のみならず平均でも大幅に小 さくなることが確かめられた.また,本実験の限りにおいて,第 3 章の定理 4 で述べた, DFA を反転したものを入力とする場合の,V´azquez らのアルゴリズムの出力の状態数の 最大値を超える反例は確認されなかった.
4.3
実験
4.3
:状態の選択順による出力の状態数の変化
V´azquez らのアルゴリズムで任意性のある状態の選択順による,出力の状態数の違いを 実験的に比較した.状態の選択順による V´azquez らのアルゴリズムの出力の状態数の実験 結果を図 4.2,4.3,4.4 に示す.ただし,図 4.2,4.3 は,入力の NFA M = (Q, Σ, δ, I, F ) の アルファベットサイズ|Σ| を固定して,状態数 |Q| を変化させて,出力 Atom(Rev(M)) = (Q′, Σ, δ′, I′, F′) の状態数|Q′| を調べたものであり,図 4.4 は,入力の NFA M の状態数表 4.1: DFA M を入力とする Det(Rev(M )) と Atom(Rev(M )) の状態数の比較結果 入力 M の Det(Rev(M )) の状態数 Atom(Rev(M )) の状態数 状態数 平均 標準偏差 最大値 最小値 平均 標準偏差 最大値 最小値 2 1.60 0.73 3 1 1.46 0.50 2 1 3 3.31 2.03 7 1 2.56 1.20 4 1 4 6.39 3.63 15 1 4.21 1.65 6 1 5 12.34 6.91 31 1 5.71 1.97 8 1 6 21.33 12.83 63 1 7.67 1.95 10 1 8 54.18 32.75 171 1 11.06 1.78 14 1 10 132.66 100.44 839 11 14.15 1.51 17 8 15 735.90 1170.36 15631 64 21.85 1.96 27 17 20 3093.78 3115.27 21740 315 29.11 2.25 37 24 22 5374.23 7668.27 81970 380 31.58 2.13 38 25 を|Q| = 20 に固定して,アルファベットサイズ |Σ| を変化させて,出力 Atom(Rev(M)) の状態数|Q′| を調べたものである.この出力の状態数は,FAdo を用いて各入力条件に つき,ランダムに生成した 200 個の DFA M に対する,Atom(Rev(M )) の状態数の平均 である.また,各図において,Unspecified とあるのは,実験 4.2 で述べた実装による選 択順の結果であり,Mimimum-state-first は,サイズの小さい状態を優先する選択順の, Maximum-state-first は,大きい状態を優先する選択順のそれぞれの結果である. 各図より,入力の状態数|Q| が大きく,アルファベットサイズ |Σ| が小さいときに,サ イズの小さい状態を優先する選択順が有効といえる結果となった.これは,入力の状態 数|Q| が大きいほど,出力の状態数も大きくなり,Algorithm 1 の L に追加される状態の サイズも幅広くなることから,状態の選択順による影響がより現れたと考えられる.ま た,アルファベットサイズ|Σ| が大きいと,δ(P, a) のサイズも幅広くなることから,状 態の選択順による影響が小さくなったと考えられる.
0 10 20 30 40 50 60 70 80 |Q| 0 20 40 60 80 100 120 |Q'| Maximum-state-first Unspecified Minimum-state-first 図 4.2: 状態の選択順による,V´azquez らのアルゴリズムの出力の状態数の違い(|Σ| = 4). 0 10 20 30 40 50 60 70 80 |Q| 0 20 40 60 80 100 120 |Q'| Maximum-state-first Unspecified Minimum-state-first 図 4.3: 状態の選択順による,V´azquez らのアルゴリズムの出力の状態数の違い(|Σ| = 16). 0 5 10 15 20 25 30 alphabet size 0 5 10 15 20 25 30 35 |Q'| Maximum-state-first Unspecified Minimum-state-first 図 4.4: 状態の選択順による,V´azquez らのアルゴリズムの出力の状態数の違い(|Q| = 20).