MECHATROLINK協会
事務局代表
三輪 卓也
JIIA殿主催 Industry 4.0 セミナー
「Industry 4.0 に対するフィールドネットワーク市場の動向と
ビジョンシステムのフィールドネットワーク対応による将来性について」
目次
1.Industry 4.0及び各種ネットワークに関する市場動向
2.フィールドネットワークの市場動向について
3.ビジョンシステムのフィールドネットワーク対応に対する将来性
について
「Industry 4.0 に対するフィールドネットワーク市場の動向と
ビジョンシステムのフィールドネットワーク対応による将来性について」
1-1.Industry 4.0とは
Industry 4.0とは:
ドイツ政府が中心となって第4次産業革命の位置づけとして、提唱。
IT技術「サイバーフィジカルシステム(Cyber Physical System)」を活用した新たな
モノづくりであり、それを具体化するスマートファクトリ-の実現と捉えられている。
第1次産業革命:
蒸気機関による機械化
第2次産業革命:
電力の活用による大量生産
第3次産業革命:
PLCなど電気とITを組み合わせた
エレクトロニクスによる
オートメーション化
第4次産業革命:
「サイバーフィジカルシステ
ム(Cyber Physical
System)」に基づく、新た
なモノづくり
生産性
19世紀
1970年代
2010年代
18世紀
1-2.Industry 4.0の背景
新興国
先進国
大規模・他品種大量生産
多品種変量生産
市場縮小
アプリケーション
多機能化
内需拡大
先進国企業の
製造工場増加
低コスト化
高付加価値
ニーズ多様化
市場トレンド
市場拡大
各市場でのニーズは異なる!!
ドイツをはじめ先進国が市場環境の変化に危機感。
ものづくりの革新(製造業の生き残り)への取り組みを強化。
1-3.Industry 4.0に対する各国の取り組み
Industry 4.0に対する各国の取り組み:
新たなものづくりの実現に向け、各国が中心になり主要企業を巻き込んみ標準化
を含めた主導権争いを実施中。
Indstrie4.0
(ドイツ)
Industrie4.0プラットフォーム運営委員会
・ABB AG
・Hewlett Packard GmbH
・Robert Bosch Industrietreuhand KG
・Bosch Rexroth AG
・IBM Deutschland GmbH
・SAP Deutschland AG & Co. KG
・Deutsche Telekom AG
・Infineon Technologies AG
・Siemens AG
・FESTO AG & Co. KG
・PHOENIX CONTACT Electronics GmbH
・ThyssenKrupp AG
・TRUMPF Werkzeugmaschinen GmbH
・WITTENSTEIN AG
1-3.Industry 4.0に対する各国の取り組み
Industry 4.0に対する各国の取り組み:
新たなものづくりの実現に向け、各国が中心になり主要企業を巻き込んみ標準化
を含めた主導権争いを実施中。
Industrie4.0
(ドイツ)
・ロボット革命イニシアティブ協議会
(RRI:日本)
RRI運営幹事(企業)
・㈱小松製作所
・日本電気㈱
・パナソニック㈱
・ファナック㈱
・富士通㈱
・三菱電機㈱
1-3.Industry 4.0に対する各国の取り組み
Industry 4.0に対する各国の取り組み:
新たなものづくりの実現に向け、各国が中心になり主要企業を巻き込んみ標準化
を含めた主導権争いを実施中。
Industrie4.0
(ドイツ)
・ロボット革命イニシアティブ協議会
(RRI:日本)
IVI幹事会員
・㈱IHI
・オムロン㈱
・川崎重工業㈱
・㈱神戸製鋼所
・小島プレス工業㈱
・㈱今野製作所
・㈱ダイフク
・㈱東芝
・トヨタ自動車㈱
・㈱豊田中央研究所
・㈱ニコン
・日本電気㈱
・パナソニック㈱
・㈱日立製作所(代表幹事)
・ブラザー工業㈱
・富士通㈱
・マツダ㈱
・三菱電機㈱(副代表幹事)
・㈱安川電機
・Industrial Value Chain Initiative
(IVI:日本)
1-3.Industry 4.0に対する各国の取り組み
Industry 4.0に対する各国の取り組み:
新たなものづくりの実現に向け、各国が中心になり主要企業が標準化を含めた主
導権争いを実施中。
Industrie4.0
(ドイツ)
・ロボット革命イニシアティブ協議会
(RRI:日本)
Industrial Internet Consortium
(IIC:米国)
中国製造2015
(中国)
・Industrial Value Chain Initiative
(IVI:日本)
1-4.Industry 4.0の目指す世界
Industry 4.0の目指す世界とは:
IT技術「サイバーフィジカルシステム(Cyber Physical System:CPS)」を活用した新
たなモノづくりであり、それを具体化するスマートファクトリ-の実現と捉えられている。
生産準備
生産管理・在庫管理
販売管理
保守・保全
アフターサービス
製品設計
企画
PLM
IT系
FA系
ERP
MES
SCADA
PLC,NC,RC,MC
サーボ、インバータ、I/O、センサ
情報系ネットワーク
コントローラ間ネットワーク
フィールドネットワーク
データ収集
データ蓄積
データ解析
対策適用
CPS
IT技術:
M2M
Cloud
AI
OPC-UA
・・・等
IT-FAの
情報連携
1-5.Industry 4.0の課題
Industry 4.0実現に向けた課題:
IT技術の活用は新たなものづくりを実現するため手段。
今までのものづくりの何を改善するのかをとらえることが重要。
生産準備
生産管理・在庫管理
販売管理
保守・保全
アフターサービス
製品設計
企画
PLM
IT系
FA系
ERP
MES
SCADA
PLC,NC,RC,MC
サーボ、インバータ、I/O、センサ
情報系ネットワーク
コントローラ間ネットワーク
フィールドネットワーク
データ収集
データ蓄積
データ解析
対策適用
CPS
IT-FAの
情報連携
工場の見える化:
生産モニタリング、生産性改善、
稼働率改善・・・等
生産設備の予防保全:
メンテナンス計画、稼働率
(ダウンタイム)改善、・・・等
IT技術:
M2M
Cloud
AI
OPC-UA
・・・等
1-6.Industry 4.0に対する各社取り組み
Industry 4.0に対する各社取り組み:
各社が、自社製品を活用した自社工場による実証を積極的に展開。
その活動の中で、FA企業とIT企業の連携が活発化。
・シーメンス×松下(2016/4)
電子機器産業におけるオートメーション規格の
共同開発を合意
製造プロセスのライン統合及びオートメーション
構想に関するパートナーシップを構築
•安川電機×IBM(2016/6)
安川電機のロボットとIBMのAI技術を利用したロ
ボットの稼働率向上(予知・予防保全)の実現
・ファナック×ロックウェル(2016/1)
ファナックのロボット/CNCとロックウェルの
MESとの接続し、稼働状況の見える化(つなが
る工場)を実現
・ファナック×シスコ(2016/1)
ファナックのロボット及びその解析技術とシスコ
のIoTソリューションとの接続し、ロボットの稼働
率向上(予知・予防保全)の実現
・ファナック×NAVDIA(2016/10)
ファナックのロボット及びその解析技術と
NAVDIAのAI技術を利用したロボットの操作の簡
単化と高知能化を実現
・日立製作所×ServiceNow Inc(2016/7)
日立の統合システム運用管理ソフトウェアと、 ServiceNow
Inc のSaaS型ITサービスマネジメントを連携させ、企業のIT
サービスマネジメントのさらなる最適化を実現するソリューショ
ンの提供
•三菱電機×インテル(2014/9)
インテルの IoT 技術と三菱電機の e-F@ctory ソリューションが
組み合わさることで、障害予測などの革新的な機能を提供し、工
場の生産性向上を実現
•三菱電機×e-Factoryパートナー
三菱電機のPLCを軸にした e-F@ctory ソリューションとの連携
のため、IT企業やコンポーネント企業など連携を実施
2-1.フィールドネットワークの位置づけ
フィールドネットワークの位置づけ
コントローラ間ネットワーク
フィールドネットワーク
上位情報系ネットワーク
フィールドネットワークは、ネットワークの階層の中で、一番下位に位置づけされます。
フィールドネットワークの中でも、特にアクチュエータ制御や、IO制御など、システムを駆動
したり制御情報を入力するための機器がつながるネットワークを、一般的に「モーション・
ネットワーク」と呼びます。(これに対し、I/O用途のネットワークは「I/Oネットワーク」)
モーション・ネットワークに必要な要件には、高速性、定周期性、同期性、低ジッター、多
ノード接続、サイクリックと非サイクリック通信などが挙げられます。
サーボ、リモートI/O、 センサ、情報入出力 機器 MC、PLCなど末端の 機器をコントロール する製品 パネルコンピュータ やパソコンなど 生産管理システム、 保全システムなどPLC
Servo Servo I/O Servo I/O Servo INV I/O I/O
NC
Spin dleMC
motion network
I/O network
ネットワーク 国 開発元 推進団体 URL
MECHATROLINK 日本 安川電機 MECHATROLINK協会(MMA) www.mechatrolink.org
EtherCAT ドイツ Beckhoff EtherCAT Technology Group (ETG) www.ethercat.org PROFIBUS / PROFINET ドイツ Siemens PROFIBUS & PROFINET International (PI) www.profibus.com ETHERNET POWERLINK オーストリア B&R ETHERNET POWERLINK Standardization
Group (EPSG) www.ethernet-powerlink.org Ethernet/IP, DeviceNet,
CompoNet 米国 Rockwell Automation Open DeviceNet Vendors Association (ODVA) www.odva.org SERCOS ドイツ ABB, Bosch, Indramat Sercos International e.V. www.sercos.org CC-LINK / CC-LINK IE 日本 三菱電機 CC-LINK Partner Association (CLPA) www.cc-link.org
SynqNet 米国 MEI SynqNet Interest Group www.synqnet.org
VARAN bus オーストリア Sigmatek “VARAN-BUS-NUTZERORGANISATION"
(VNO) www.varan-bus.net
ネットワーク 国 企業 URL
SSCNET-III/H 日本 三菱電機 (SSCNETパートナー会) www.mitsubishielectric.co.jp/fa/products/cnt/ssc/affiliates/partner/ Realtime Express 日本 パナソニック (パートナー会) industrial.panasonic.com/jp/i/25000/n_minas_a4n/n_minas_a4n/rtex.html
CUnet, HLS 日本 ステップテクニカ www.steptechnica.com
Motionnet 日本 日本パルスモーター www.pulsemotor.com/products/motionnet.html motionCAT 日本 ハイバーテック www.hivertec.co.jp/products/haisen/
A-Link, A-net 日本 アルゴシステム www.algosystem.co.jp
Open network
Private network
FL-net (OPCN-2)
ドイツ
オーストリア
アメリカ
日本
2-2.主なオープンネットワーク:国別
ODVA
(DeviceNet, Ethernet/IP)CLPA
(CC-LINK)
ETG
(EtherCAT)
EPSG
(Powerlink)
MMA
PI
(Profibus & Profinet)
SI
(Sercos)
VNO
(VARAN)
CiA
(CAN/CANopen)CANopen
CANopen
Sercos
profile
CIP Safety
DeviceNetは
CAN(物理層)を使用
CANopen
各団体の持つネットワーク技術による協力関係
日本
ドイツ
ドイツ
アメリカ
ドイツ
ドイツ
オーストリア
相互接続の協業
(2015/11発表)PI もPRしている。
2-3.主なオープンネットワーク団体の関係
2-4.主なオープンネットワーク団体の取り組み
IT系との情報連携に向けて、コントローラネットワークをサポートする団体は、OPC
Foundationと連携強化。
⇒OPC-UAでセキュリティを確保しながらIT系システムへの情報連携と標準化が加速
2016/4
2015/4
IT系
FA系
■モーションネットワーク(MECHATROLINK、EtherCAT、SSCNETなど)
通信サイクル Slave1 Slave2 Slave3
Master→Slave Slave→Master
■I/Oネットワーク(DeviceNet、CC-LINKなど)
•
定周期性の保証
→たとえば、1msサイクルの通信であれば、1msサイクルを保証。
•
同期の仕組みがある
→複数のスレーブが同期して動作する仕組みを持っている。
•
ジッタ(Jitter; 時間の揺らぎ)が1usec以下
→各ノード間におけるジッタが1usecである。
このジッタが小さいほど、同期性が高い。
(通信データの送受信タイミングの揺らぎではなく、各スレーブのコマンドデータの
処理タイミングの揺らぎのこと。)
Slave1 Slave1 Slave2 処理開始I/Oネットワークではコマンド受信したタイ
•
定周期性は保証されない
→通信データサイズにより、通信時間は変化する。
サイクリックな通信は可能だが、Best Effort方式となる。
•
同期の仕組みはない
→複数のスレーブは通信データを受信したタイミングで処理を開始する。(下図参照)
要件
2-5.フィールドネットワークの種類:モーションネットワークとI/Oネットワーク
■モーションネットワーク(MECHATROLINK、EtherCAT、SSCNETなど)
■I/Oネットワーク(DeviceNet、CC-LINKなど)
•
複数スレーブでの補間運転も可能。(同期性、サイクリック通信、時間確定性)
•
サーボ側に速度プロファイル等を持った位置決め動作も可能。(コマンド)
•
速度指令、トルク指令も可能。(コマンド)
•
I/Oネットワークでもサーボ等のアクチュエータを接続可能だが、この場合、
アクチュエータ側に速度プロファイル等を持ち、その運転の起動、停止を通信
経由で行うことになる。
•
複数スレーブ間の同期性がないため、補間運転は出来ない。
•
速度指令、トルク指令も可能とは思われるが、一般に上位で位置ループ、速度
ループを組むことは無い。
Position
Control
Velocity
Control
Torque
Control
Motion
Profile
Motor
Encoder補間指令
位置決め
サーボが持つ 速度プロファイル等に よる移動速度指令
トルク指令
モーション用途で使用すると・・・
2-5.フィールドネットワークの種類:モーションネットワークとI/Oネットワーク
Network 物理層 伝送速度 伝送周期 同期性 リトライ
機能 IEC61158 / IEC61784 IEC61800-7(PDS) 備考
MECHATROLINK-Ⅲ Ethernet 100 Mbps 31.25us~ Yes Yes Yes No
EtherCAT Ethernet 100 Mbps 10us~ Yes No Yes Yes
(IEC61800-7-301, IEC61800-7-304)
Sercos-Ⅲ Ethernet 100 Mbps 31.25us~ Yes No Yes Yes
(IEC61800-7-304) PROFINET IRT Ethernet 100 Mbps 250us~ Yes No Yes Yes
(IEC61800-7-303) Ethernet/IP with CIP
Motion Ethernet 100 Mbps 200us~ Yes(CIP Sync) No Yes Yes(IEC61800-7-302) CC-LINK IE Field
Motion Ethernet 1 Gbps 111us~ Yes No Yes Yes(IEC61800-7-301) CC-LINK IE Field
Basic Ethernet 100 Mbps Yes No No No
SynqNet Ethernet 100 Mbps ZMP : 20.8us
XMP : 62.5us Yes No No No
VARAN Ethernet 100 Mbps <100us~ Yes Yes No No
SSCNET-Ⅲ/H ? 150 Mbps 222us~ Yes No No No 111usがあるとの噂あり
Realtime Express Ethernet 100 Mbps 83us~ Yes No No No motionnet
motionCAT RS-485 2.5, 5, 10, 20 Mbps 120 us / 8 slave240 us / 16 slave 480 us / 32 slave 970 us / 64 slave No No No No 同期性は無い通信だが、 半導体業界に入り込んで いる。
2-6.フィールドネットワーク:Motion 用途向けネットワーク概要
IEC 61158
(Communication Layers)
IEC 61784-1
(Communication Profiles)
IEC 61784-2
(Realtime Ethernet RTE)
IEC 61784-3
(Safety Communication)
IEC 61784-4
(Security)
IEC 61784-5
(Installation)
-1
Overview
-2
Physical
Layer
-3 Data link Service, Type 1,2,3,4...,
24
-4 Data link Protocol, Type 1,2,3,4...,
24
-5 Application Layer Service, Type 1,2,3,4...,
24
-6 Application Layer Protocol, Type 1,2,3,4...,
24
IEC61784-4 は各ネットワーク用個別の仕様、IEC61918が共通の要求仕様。 IEC61784-5 は各ネットワーク用個別の仕様、IEC62443が共通の要求仕様。 MECHATROLINK-II/III (Type24) -3-1 FF SIF -3-2 CIP Safety -3-3 PROFIsafe -3-6 INTERBUS Safety -3-8 CC-LINK Safety -3-12 EtherCAT Safety -3-13 Powerlink Safety CIP CIP FF PROFIBUS PROFINET MECHATROLINK-II/III EtherCAT Powerlink CIP FF PROFIBUS PROFINET
フィールドネットワークに対するIEC規格は、主なオープンフィールドネットワークが対応済み
MECHATROLINKは、type24として追2014年の改版追加され、現在は、FL-netやADSnetの追加が審議中。
2-7.フィールドネットワーク:主なオープンネットワークのIEC規格対応について
(IEC61158 / 61784)
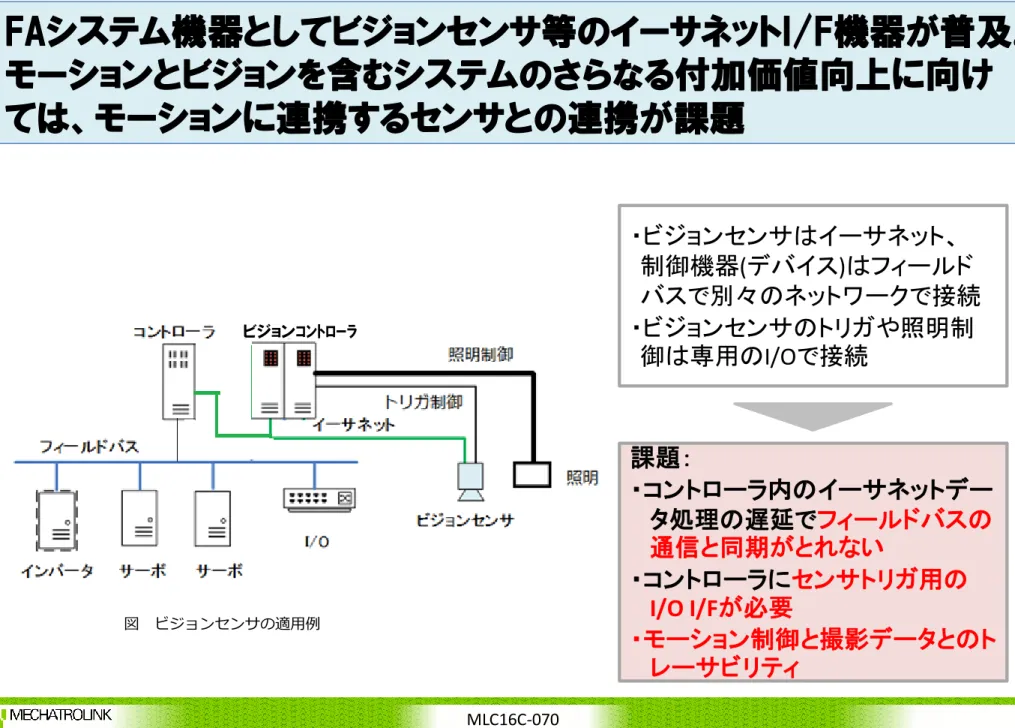
図 ビジョンセンサの適用例