2019年度 修士論文
濁度の深さ分布計測のための 移動式イメージングライダーの開発
首都大学東京 システムデザイン研究科 電子情報システム工学域
学修番号 18861616 氏名 寺内 崇 指導教員 阿保 真 教授
目次
第1章 はじめに ... 1
第2章 移動式イメージングライダーの原理 ... 6
2.1 移動式イメージングライダー方程式 ... 6
2.2 補正係数 ... 12
2.3 減衰係数と誤差の導出 ... 15
第3章 画像データからの信号強度の取得方法 ... 18
3.1 信号強度の算出方法 ... 18
3.2 背景光除去方法 ... 20
第4章 屋外実験 ... 23
4.1 実験道具の設計・設置 ... 23
4.2 実験内容と撮影地点 ... 26
4.3 画像から得られた信号強度 ... 31
第5章 実験データの解析 ... 34
5.1 システムの幾何学的パラメータの導出方法 ... 34
5.2 直線フィッティング窓の設定... 38
5.3 信号強度に現れるスパイク除去方法 ... 39
5.4 地点別の減衰係数の深さ分布... 42
5.5 地点別の濁度の深さ分布... 46
第6章 まとめ ... 51
謝辞 ... 52
参考文献 ... 53
1
第1章 はじめに
海や川,湖といった自然環境における水源は純粋な水だけでなく,微細な粒子や微生物な どによる浮遊物質によって透明度が異なっている.高度経済成長に伴いそれらの水源が汚 染されている話も記憶に新しい.図1.1に示すような東京湾の青潮はその一例であり,浚渫 工事に伴う弊害である.東京湾の水質調査に図1.2に示すようなモニタリングポストや図3 に示すような採水器などが用いられている.図1.4に示すような多項目水質計を用いて計測 され水温や濁度,赤潮発生の目安とされるクロロフィル a 濃度の連続的に観測することが できる1).ただし定点のみの観測であり,モニタリングポスト自体が非常に高価なため広範 囲の計測には向いていない.図1.5にモニタリングポストによる濁度の観測例を示す.
濁度の水平・深さ分布を知ることはその環境の水質汚染の発生メカニズムの解明や汚染 状況の把握のために必要な要素の一つであり,広範囲計測によってそれらの有効性を高め ることができる.
図1.1 東京湾おける青潮
(https://www.pakutaso.com/20170601177post-12219.html)
2
図1.2 東京湾に設置されているモニタリングポスト(東京湾リアルタイム水質データ https://www1.kaiho.mlit.go.jp/monitoring/)
図1.3 採水器(ウォーターサンプラー) (https://is.gd/qjDqvf)
3
図1.4 多項目水質計(JFE アドバンテック社 AAQ-RINKO) (https://www.jfe-advantech.co.jp/support/catalog.html)
図1.5 モニタリングポストによる濁度の計測例(東京湾リアルタイム水質データ https://www1.kaiho.mlit.go.jp/monitoring/)
4
先行研究2)では連続観測に優れているライダー手法を用いて,簡易的に水中浮遊物質の鉛 直分布を高頻度・連続に計測可能な新しいバイスタティックイメージングライダーが提案 された.システムの特長として,連続観測により水の濁り具合の変化を高い時間・空間分解 能で見ることが可能であること,海岸に固定して設置し定点観測が可能である事などが挙 げられる.またCCDカメラとレーザ装置がシステムの主な部品であるため,モニタリング ポストにおける計測手法よりも比較的低コストでの観測が可能である.先行研究の水中バ イスタティックイメージングライダーの概要図を図1.6に示す.海岸から水面に向けてレー ザを斜めに照射し,同じ海岸に設置したカメラで画像を取得し,画像処理を行う事によって 散乱光強度の深さ分布を求める装置で,基本的には定点観測を目的とした固定式となって いる.
本研究では図 1.7 の概要図に示すような広範囲計測可能かつ安価に製作可能な移動式イ メージングライダーの開発を行った.このシステムは,
① レーザとカメラを小型の箱に収納し,その箱をボートで牽引する事で定点だけでなく広 範囲での計測が期待できる.
② 箱の底に窓をつけ水面下からの画像を取得するため,水面の波の影響をなくし,水面の 波による光路の揺らぎや水面反射による背景光を大幅に低減することができる.
といった特徴がある.
本研究の目的は,移動式イメージングライダーを開発しそれを用いて実際の環境下にお ける水の濁り具合を測定することである.実際に装置を設計・開発をし,屋外実験に取り組 みその有用性を示す.
5
図1.6 固定式バイスタティックイメージングライダーの概要図
図1.7 移動式イメージングライダーの概要図
6
第2章 移動式イメージングライダーの原理
2.1 移動式イメージングライダー方程式
提案方式の移動式イメージングライダーの原理は基本的には先行研究3)と同じであり,水 中に射出されたレーザービームの散乱飛跡をCCDカメラで撮影し,画像処理によって散乱 光強度の深さ分布を求める.深さ𝑑からの受信光強度𝑃(𝑑)を表す移動式イメージングライダ ー方程式は次式で表せる.
𝑃(𝑑) = 𝑃
0𝜂
0𝐴
𝑅𝛥𝑑(𝑑′)
𝛽(𝑑)𝑟2(𝑑)
𝑇(𝑑)𝑒𝑥𝑝[−𝜏(𝑑)]
(2.1)ここで𝑃0はレーザ出力,𝜂0は光学的効率,𝐴𝑅はカメラレンズの受光面積,𝛥𝑑(𝑑′)は一画素に 対応する深さである.
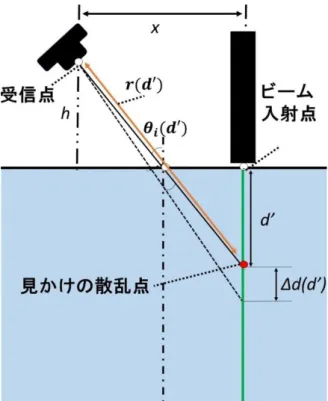
提案方式のライダーシステムの水の外から見た見かけの光路図と水中の光路図をそれぞ
れ図2.1,図2.2に示す. 実際の深さ𝑑,見かけの深さ𝑑′,見かけの散乱点から受信点まで
距離𝑟(𝑑),レーザの透過率𝑇(𝑑)4)は図中の記号を用いて以下の式で表せる.
𝑑 =
𝑥−ℎ tan 𝜃𝑖tan 𝜃𝑣 (2.2)
𝑑′ =
𝑥tan 𝜃𝑖
− ℎ
(2.3)𝑟(𝑑) =
ℎ+𝑑cos 𝜃𝑖 (2.4)
𝑇(𝑑) = 𝑇
𝑖𝑛(𝑑) ∙ 𝑇
𝑜𝑢𝑡(𝑑)
(2.5)𝑇
𝑖𝑛(𝑑) =
ncos 𝜃𝑣(𝑑)cos 𝜃𝑖(𝑑)
{
cos 𝜃𝑖(𝑑)cos 𝜃𝑖(𝑑)+ncos 𝜃𝑣(𝑑)
+
cos 𝜃𝑖(𝑑)ncos 𝜃𝑖(𝑑)+cos 𝜃𝑣(𝑑)
}
2(2.6)
7
𝑇
𝑜𝑢𝑡(𝑑) =
cos 𝜃𝑖(𝑑)ncos 𝜃𝑣(𝑑)
{
cos 𝜃𝑖(𝑑)cos 𝜃𝑖(𝑑)+ncos 𝜃𝑣(𝑑)
+
cos 𝜃𝑖(𝑑)ncos 𝜃𝑖(𝑑)+cos 𝜃𝑣(𝑑)
}
2(2.7)
ここで,𝑛は水の屈折率,𝜃𝑖は受信点から散乱点へ向かう光路の入射角,𝜃𝑣は屈折角であ る.水の光学的厚さ𝜏(𝑑′)は減衰係数𝜎(𝑥)を用いて以下の式で表せる.
𝜏(𝑑) = −(𝜏
𝑙𝑎𝑠(𝑑) + 𝜏
𝑠𝑐𝑎(𝑑))
(2.8)𝜏
𝑙𝑎𝑠(𝑑) = ∫ 𝜎(𝑥)𝑑𝑥
0𝑑, 𝜏
𝑠𝑐𝑎(𝑑) = ∫ 𝜎(𝑥)𝑑𝑥
𝑑 cos 𝜃𝑣(𝑑)
0 (2.9)
𝛽(𝑑)は深さ𝑑における水の体積散乱係数を表し,純水のレイリー散乱成分𝛽𝑟𝑎𝑦𝑙𝑒𝑖𝑔ℎ(𝑑)とミ ー散乱成分𝛽𝑚𝑖𝑒(𝑑)を用いて以下の式で表せる.
𝛽(𝑑) = 𝛽
𝑟𝑎𝑦𝑙𝑒𝑖𝑔ℎ(𝑑) + 𝛽
𝑚𝑖𝑒(𝑑)
(2.10)これらの散乱係数は位相関数と呼ばれる角度依存性を持つが実際の環境ではミー散乱に よる影響が大きく,存在する粒子の形や粒形が不規則であるため,計算上では定数として扱 っている.
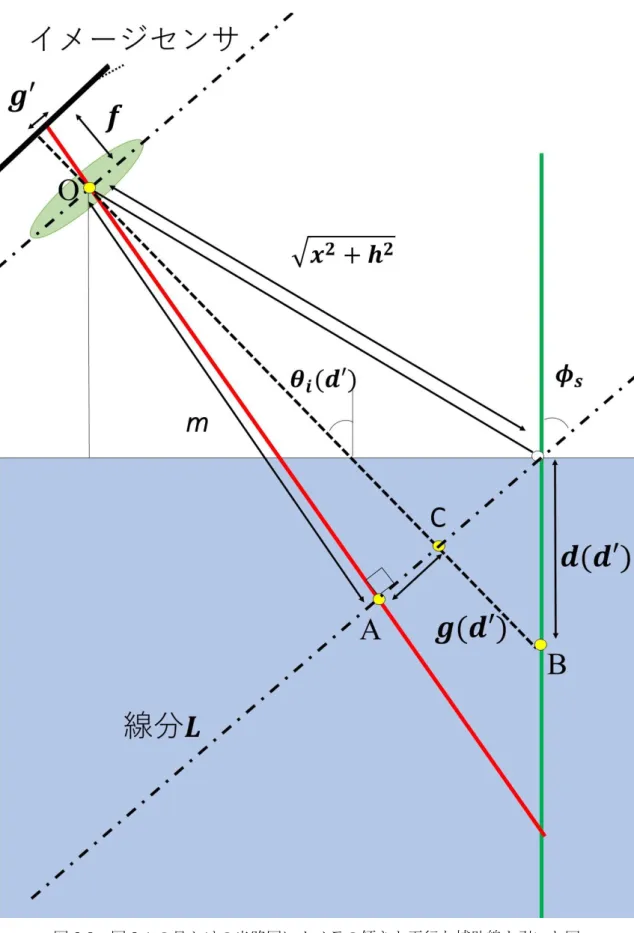
図 2.3 に図 2.1 にカメラの傾きに平行でレーザの入射点を通る補助線を引いた図を示 す.この補助線を𝐿,受信点をO,Oから𝐿に下した垂線の交点をA,散乱点B,線分OA̅̅̅̅と𝐿の 交点をCとする. OA̅̅̅̅を𝑚, AB̅̅̅̅を𝑔(𝑑),一画素当たりの横幅を𝑔′,焦点距離を𝑓と,𝑚と𝑔(𝑑) はカメラの傾き角𝜙𝑠を用いて以下のように表せる.
𝑚 = √𝑥
2+ ℎ
2sin {
𝜋2
− 𝜙
𝑠+ tan
−1 ℎ𝑥
}
(2.11)𝑔(𝑑) =
𝑚tan{𝜋−tan−1( 𝑥
ℎ+𝑑)−𝜙𝑠}
(2.12) 入射角𝜃𝑖と屈折角𝜃𝑣はこの𝑚と𝑔(𝑑)を用いて以下のように表せる.
8
𝜃
𝑖(𝑑) = 𝜃
𝑖(𝑑′) =
𝜋2
− 𝜙
𝑠+ tan
−1 𝑔(𝑑)𝑚 (2.13)
𝜃
𝑣(𝑑) = sin
−1(
sin 𝜃𝑖(𝑑)𝑛
)
(2.14)𝛥𝑑(𝑑′)は(2.2)式の差分により求めることができる.本研究のイメージングライダーの特 徴として𝛥𝑑(𝑑′)は浅い部分の分解能は高く,深い部分になるほど分解能が低くなるという ものがある.
9
図2.1 水の外から見たバイスタティックイメージングライダーの見かけの光路図
図2.2 バイスタティックイメージングライダーの水中の光路図
10
図2.3 図2.1の見かけの光路図にカメラの傾きと平行な補助線を引いた図
11
表2.1 式2.1から式2.14で使用するパラメータ
𝑥 点Oからレーザまでの水平距離
ℎ 水面から点Oまでの高さ
𝑓 カメラの焦点距離
𝜙𝑠 カメラの傾き
𝑔(𝑑) AC̅̅̅̅
𝑔′ カメラの1画素当たりの横幅
𝑚 OA̅̅̅̅
𝜃𝑖(𝑑) 点Oから点Bへ向かう入射角 𝜃𝑣(𝑑) 𝜃𝑖に対する屈折角
𝑑 真の点B深さ
𝑑′ 見かけの点Bの深さ
𝛽(𝑑) 深さ𝑑に対する水の体積散乱係数
𝛥𝑑(𝑑′) 見かけの深さ分解能
𝑟(𝑑) OB̅̅̅̅の見かけの距離
𝑇(𝑑) 水面の透過率
𝜏(𝑑) 水の光学的厚さ
𝑃0 レーザの出力
𝜂0 光学的効率
𝐴𝑅 カメラレンズの受光面積
12 2.2 補正係数
減衰係数を導出するためには画像から得られた信号強度を補正する必要がある.補正係 数には主に以下の3つがある.
① 散乱光の広がりに対する距離二乗補正(𝑟2(𝑑))
② 深さ分解能補正( 1
∆𝑑(𝑑′))
③ 水面の透過率補正( 1
𝑇(𝑑))
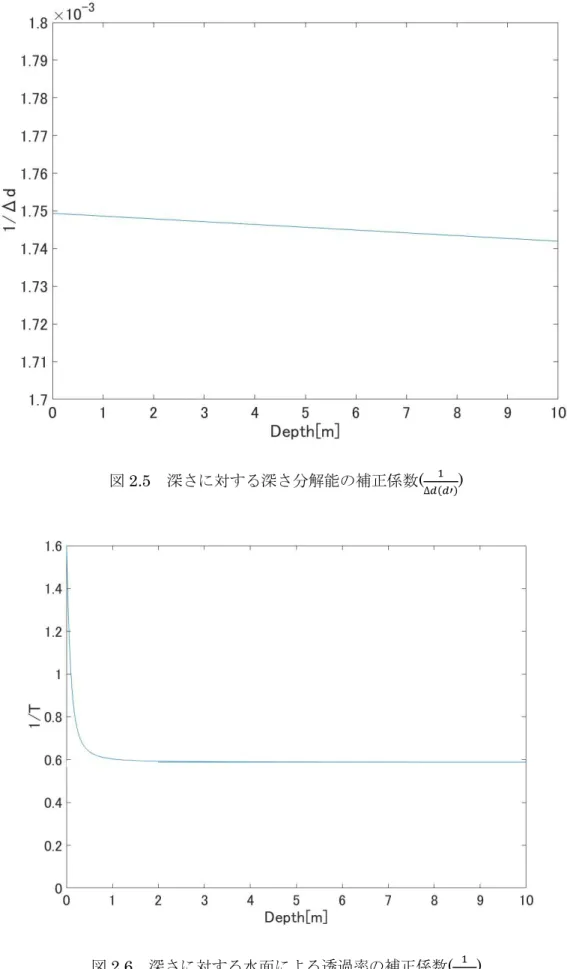
①から③のそれぞれの補正係数を深さに対して計算した結果を図2.4から図2.6に示す.
また①から③すべての補正係数を掛けた全体の補正係数を図 2.7 に示す.計算では𝑥 = 20.5𝑐𝑚,ℎ = 11𝑐𝑚とした.
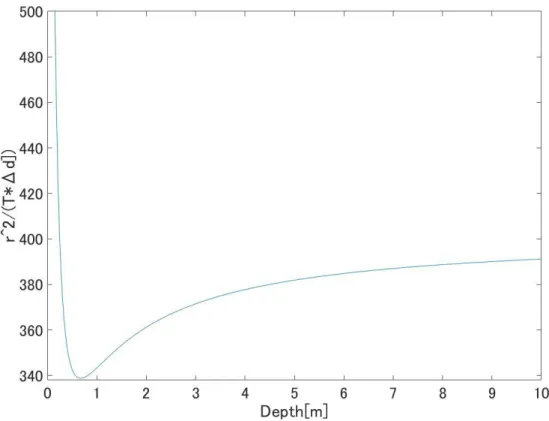
図2.4 深さに対する散乱光の広がりに対する距離二乗補正係数(𝑟2(𝑑))
13
図2.5 深さに対する深さ分解能の補正係数( 1
∆𝑑(𝑑′))
図2.6 深さに対する水面による透過率の補正係数( 1
𝑇(𝑑))
14
図2.7 ①から③を掛け合わせた深さに対する全体の補正係数
15 2.3 減衰係数と誤差の導出
取得した画像から得られた信号強度より,深さごとの減衰係数を求めるためにバイスタ ティックイメージングライダー方程式を(式(2.1))𝜏(𝑑′)について整理すると以下のような形 になる.
𝑒𝑥𝑝[−𝜏(𝑑)] =
𝑃(𝑑)𝑟2(𝑑)𝑃0𝜂0𝐴𝑅𝛥𝑑(𝑑′)𝛽(𝑑)𝑇(𝑑)
≡ 𝑃′(𝑑)
(2.15) (2.15)式の両辺の対数をとると以下の形で表せる.𝜏(𝑑) = log 𝑃′(𝑑)
(2.16) (2.8),(2.9)式よりcos 𝜃𝑣(𝑑) ≈ 1と近似して,(2.16)式に代入すると−𝜏(𝑑) ≈ 2 ∫ 𝜎(𝑥)𝑑𝑥
0𝑑= log 𝑃′(𝑑)
(2.17)𝜎(𝑑) = −
12 𝑑
𝑑𝑑
log 𝑃′(𝑑)
(2.18)(2.18)式の右辺は測定より得られた信号強度に補正係数をかけた𝑃′(𝑑)を深さ微分した値 である.従って減衰係数導出は以下の手順に沿って行う.
(ⅰ) 画像処理より得られた𝑃(𝑑)を用いて𝑃′(𝑑)を算出
(ⅱ) 𝑃′(𝑑)を分割し,区間ごとの信号強度分布から回帰直線を推定する(最小二乗法)
(ⅲ) (ⅱ)の直線の傾きをそれぞれの区間の中点の減衰係数とする
以上の手順により対象の減衰係数の深さ分布が求められる.
16
(ⅱ)で求めた回帰直線𝑦̂(𝑥)は以下のように表すことができる.
𝑦̂(𝑥) = 𝑎̂ + 𝑏̂𝑥 (2.19)
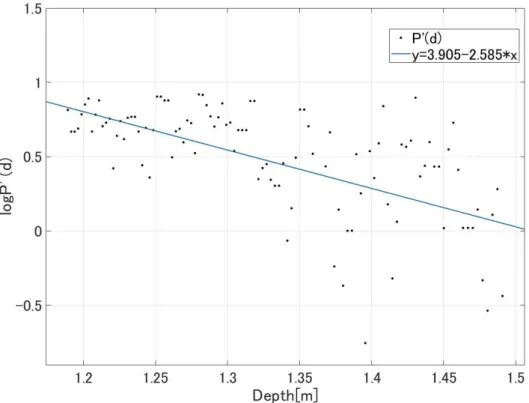
計算例として図2.8に区間1.1891m~1.4907mにおける𝑃′(𝑑)と,最小二乗法により推定 した近似直線𝑦̂(𝑥)のグラフを示す.このグラフから区間 1.1891m~1.4907m における近似 直線の係数𝑏̂ = −2.585より,区間の中点 1.3399m における減衰係数=2.585[1/m]と求める ことができる.
減衰係数の推定誤差は,係数𝑏̂の信頼区間を計算することでを算出する.係数𝑏̂の信頼区
間99%は次式で表すことができる5).
𝑏̂ ± 𝑡(𝑛−𝑝,𝛼
2=0.005)∙ 𝑆𝐸(𝑏̂) (2.20) ここで𝑡は自由度𝑛 − 𝑝,危険率𝛼/2(両側検定)における𝑡分布の値,𝑛は観測数,𝑝は回帰係 数の個数,𝑆𝐸(𝑏̂)は係数の推定値の標準誤差である.
図 2.8 の区間において係数𝑏̂の信頼区間を計算すると,減衰係数=2.585 [1/m]は[1.785 3.386]の間の誤差で推定できる.
17
図2.8 ある区間における最小二乗法による近似直線
18
第3章 画像データからの信号強度の取得方法
3.1 信号強度の算出方法
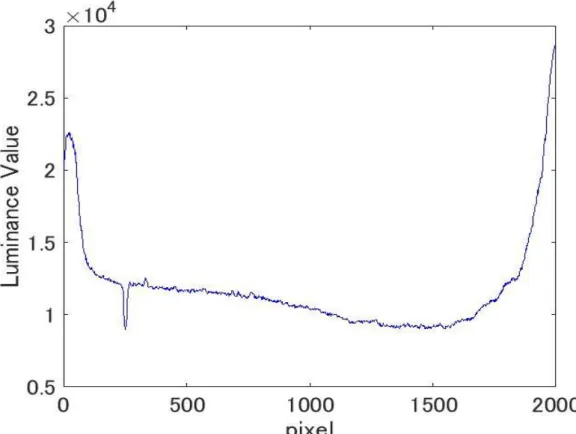
イメージングライダーではレーザビームの散乱飛跡をデジタルカメラで撮影した画像か ら信号強度を取り出す必要がある.レーザ散乱の信号強度は輝度値に相当するものでが,ビ ームに幅があるため画像処理によって信号強度を計算する.室内実験における暗闇の中で 撮影したレーザビームの散乱飛跡を図3.1に,図3.1を切り出しレーザ幅方向に輝度値を積 算したものを図3.2にそれぞれ示す.画素番号が深さに対応するためこの処理によって深さ ごとの信号強度が求められる.
画像データから信号強度を求める手順を以下に示す.
① 取得した画像をレーザビーム幅に切り出す
② 背景光を除去する
③ ②を列ごとにG成分の輝度値を積算する
図3.3に輝度値を積算し信号強度を求める方法を示す.
図3.1 暗闇の中で撮影したポリタンク水中での レーザビームの散乱飛跡
19
図3.2 切り出し画像の輝度値を積算したグラフ
図3.3 画像データから信号強度を求める方法
20 3.2 背景光除去方法
レーザの散乱飛跡を撮影する際,屋外では昼間の太陽による背景光の影響が大きい.それ らを取り除くためにレーザON画像とレーザOFF画像の差分を求め法を提案する.差分画 像による背景光除去の有効性を確かめるために室内実験を行った.
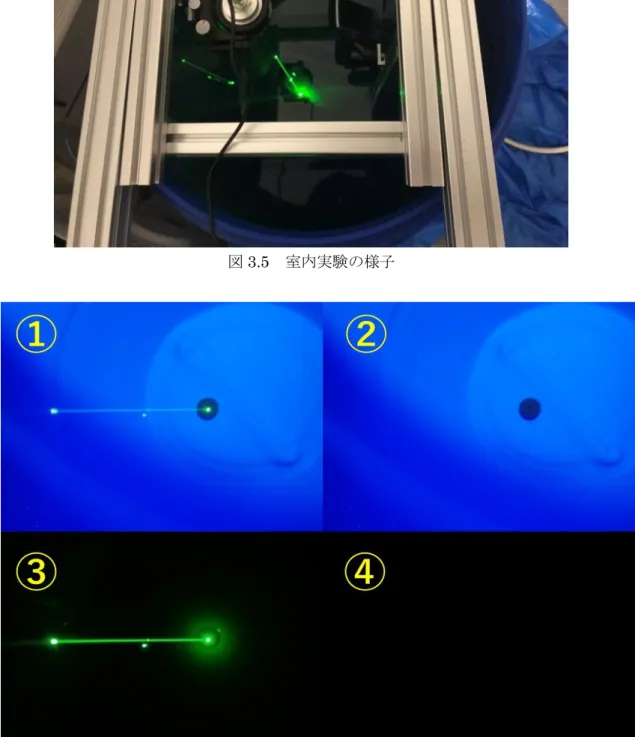
室内実験はポリタンク (胴径φ586mm×全高 978mm)に水道水を満たし,アクリルケー ス(30cm 四方)と白色 LED ライトを用いて行った.アクリルケース内部にフレームを取り 付けカメラとレーザを固定し水中にレーザを照射するよう設計し,LED ライトを用いて背 景光の有無を切り替えられるようにした.室内実験の様子を図3.5に示す.
実験では以下に記す4種類の画像を取得した.
① LEDライトON,レーザON
② LEDライトON,レーザOFF
③ LEDライトOFF,レーザON
④ LEDライトOFF,レーザOFF
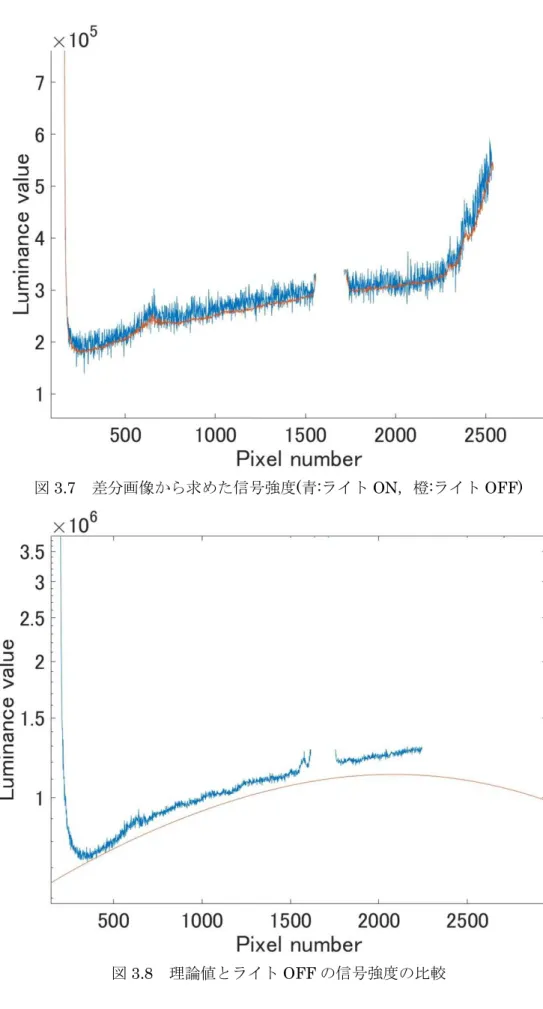
上記①から④の画像を図3.6に示す.取得した画像から,①と②の差分画像と③と④の差 分画像から求めた信号強度を図3.7に示す.信号強度の理論値は式(2.1)と表3.2を用いて計 算した.③と④の差分画像から得られた信号強度と理論値を比較したグラフを図 3.8 に示 す.背景光ありの信号強度は全体的にノイズが大きいが,背景光無しから得られた信号強度 と背景光ありから得られた信号強度は概ね一致していた,以上の実験から差分画像が背景 光除去に有効であることを示した.
表3.1 理論値算出に用いた室内実験のパラメータ 𝑥
点Oからレーザまでの
水平距離 11.0cm
ℎ
アクリル板から
点Oまでの高さ 5.0cm
𝑓 カメラの焦点距離 4mm
𝜙𝑠 カメラの傾き 60.0°
21
図3.5 室内実験の様子
図3.6 ①ライトON/レーザON,②ライトON/レーザOFF,
③ライトOFF/レーザON,④ライトOFF/レーザOFFの取得画像
22
図3.7 差分画像から求めた信号強度(青:ライトON,橙:ライトOFF)
図3.8 理論値とライトOFFの信号強度の比較
23
第4章 屋外実験
移動式イメージングライダーで水の減衰係数と濁度の測定が可能であることを検証する ために屋外実験を行った.屋外実験は神奈川県相模原市にある相模湖で行った.相模湖は相 模ダムによる人造湖であり,最大水深は33.8mであり平均水深は19.4mである6).
4.1 実験道具の設計・設置
水上を移動しながらの観測を想定し,バッテリーでも動作可能な小型のレーザとデジタ ルカメラを用いた移動式イメージングライダーの設計を行い,屋外でも観測可能な装置を 作成し屋外での実験を行った.イメージングライダーの仕様を表4.1に示す.
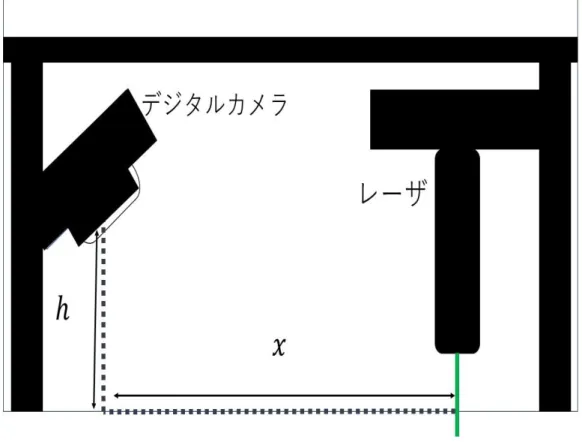
レーザとカメラはアクリルケース(36㎝×22㎝×26㎝)の中に収納し,カメラから窓まで の距離を11㎝(パラメータのℎ),カメラの受信点を窓に対して垂直におろした点からレーザ 入射点までの距離を20.5㎝(パラメータの𝑥)と設計した.レーザを装着したアクリルケース の写真を図4.1に,アクリルケース内部のカメラとレーザの配置図を図4.2に示す.レーザ
は手動でON/OFFの切り替えができるように電源スイッチを取り付けた.モバイルバッテ
リー(10000mAh)を用いて,ボート上でも長時間の測定を可能にした.さらに水上に安定し て浮かせるためにアルミフレームを使ってアクリルケースと救助用浮環(内径42cm外径72
㎝)に固定した.浮環に装着した様子を図4.3に示す.
表4.1 イメージングライダーの仕様
アクリルケース外形寸法 36㎝×22㎝×26㎝
救助用浮環 内径 42㎝
外形 72㎝ モバイルバッテリー 容量 10000mAh
小型レーザ
型 ZM18b-f-gr
出力 40mW
波長 532nm
デジタルカメラ
OLYMPUS TG-5 イメージセンサ 1/2.3
レンズ径 8㎜
24
図4.1 イメージングライダーを収納したアクリルケース (36㎝×22㎝×26㎝)の外観
図4.2 アクリルケース内部のカメラとレーザの配置図
25
図4.3 浮環に装着した装置全体の写真
26 4.2 実験内容と撮影地点
屋外実験では貸しボートに実験機材を積み込み,撮影ポイントで水面に浮かべレーザ
ON/OFFの画像を露光時間1/20秒の連写モードで複数枚撮影した.カメラの仕様と設定を
表4.2に,実際の実験地点と実験の様子を図4.4,図4.5に示す.
相模湖における実験は2019年8月31日(土)に行った.天候は晴れであるが雲が多く見 られ,日光を遮ることがあった.撮影は図4.6に示す3か所で行い,それぞれの地点でレー
ザ ON/OFFの画像を複数枚取得した.撮影時間はそれぞれ①16:38,②16:44,③17:11で
ある.図4.7から図4.9に各地点で撮影した画像を示す.
表4.2 撮影したカメラの仕様と設定
メーカ・型番 OLYMPUS TG-5
画素数 4040×3016
イメージセンサーサイズ 1/2.3型CCD(6.2×4.7mm)
焦点距離 4.0mm
F値 2.0
露光時間 1/20秒
図4.4 測定を行った相模湖の様子
27
図4.5 実験の様子
図4.6 撮影ポイントの位置
( https://www.google.co.jp/maps/@35.6100456,139.1879869,16.75z?hl=ja)
28
図4.7 地点①で撮影したON/OFF画像
29
図4.8 地点②で撮影したON/OFF画像
30
図4.9 地点③で撮影したON/OFF画像
31 4.3 画像から得られた信号強度
それぞれの地点で撮影した ON/OFF画像各14枚を使って信号強度を算出した.算出方 法に関しては第三章で述べたとおりである.地点①から地点③の各地点で得られた画像か ら取得した信号強度の深さ分布を図4.10に示す.
移動式イメージングライダーは深い地点に行くほど深さ分解能が大きくなる特徴がある.
また屋外実験における画像の左端を0,右端を4039とした画素番号に対する実際の深さと みかけの深さ分解能の計算値をそれぞれ図4.11,図4.12に示す.屋外実験で用いた設定値 における画素番号と実際の深さ及びみかけの深さ分解能の対応を表4.3に示す.
図4.10 画像処理から得られた各地点の信号強度の深さ分布(横軸は画素番号)
32
図4.11 画素番号に対する実際の深さ
図4.12 画素番号に対する深さ分解能
33
表4.3 画素番号に対する実際の深さと見かけの深さ分解能
画素番号 実際の深さ(𝑑)[m] 見かけの深さ分解能(𝛥𝑑(𝑑′))[mm]
208 0 0.068
1592 0.25 0.22
2178 0.5 0.49
2469 0.75 0.87
2643 1 1.4
2954 2 4.4
3177 5 23.6
3259 10 89.2
3346 ∞ ∞
34
第5章 実験データの解析
第 4章の屋外実験で得られた信号強度から第3章で述べた手順で減衰係数を導出する.
この章では減衰係数を導出するにあたって,パラメータ𝜙𝑠の導出方法,窓の長さ(深さ分解 能)の設定根拠,信号強度の平滑化方法,減衰係数の誤差範囲の導出方法を述べ,最後に地 点ごとに得られた減衰係数の深さ分布を示す.
5.1 システムの幾何学的パラメータの導出方法
深さ分解能Δdはライダー方程式に必要な幾何学的パラメータ𝜙𝑠(カメラの傾き)に対する 依存性が高く,特に深さ10m付近では0.1°の違いで深さが1mも変動してしまう.その ため手動での設定ではなく,写真データから逆算しパラメータを求める手法を用いた.
図5.1に示すのように深さ30㎝の箱にイメージングライダーのアクリルケースを乗せた 状態で,レーザを射出した画像を取得する.取得した画像を図5.2に,レーザ射出の概要図 を図5.3にそれぞれ示す.アクリルケースに写ったレーザ点を𝑑1=0㎝,箱の底に写った点 を𝑑2=30㎝の点とし,それぞれの点の中心画素番号を取得し𝑝𝑥1,𝑝𝑥2とする.
パラメータ𝑔(𝑑),パラメータ𝑚,一画素当たりの幅𝑔′,焦点距離𝑓を用いて以下の式から カメラの傾きが求められる.
(𝑔(𝑑
1) − 𝑔(𝑑
2))
𝑚𝑔′𝑓
= |(2020 − 𝑝𝑥
1) − (𝑝𝑥
2− 2020)|
(5.1)
本実験では4040×3016画素のカメラを用いて行ったため,中点の画素番号2020を基 準に計算している.本方法により求めた屋外時実験装置に関するパラメータの値を表5.1 に示す.
35
表5.1 実験装置に関するパラメータの値 𝑥 点Oからレーザまでの
水平距離 20.5cm
ℎ アクリル板から
点Oまでの高さ 11.0cm
𝑓 カメラの焦点距離 4mm
𝜙𝑠 カメラの傾き 63.03°
𝑔′ カメラの1画素あたりの
横幅 1.53µm
次に実験装置のパラメータ𝑥,ℎならびに中心画素番号𝑝𝑥1,𝑝𝑥2が深さに与える誤差につ いて検討する.𝑥,ℎは鋼製巻尺で,𝑝𝑥1,𝑝𝑥2は目分量でそれぞれ計測した.𝑥,ℎについて は±0.5㎝,𝑝𝑥1,𝑝𝑥2は散乱点が写る画素番号の幅を測定誤差として算出する角度の誤差 と深さ対応への影響を検討した.
表5.2に誤差の検討結果について示す.𝑥,ℎ,𝑝𝑥1,𝑝𝑥2の誤差が最も大きい組み合わせ で検討した.角度の取りうる誤差は60.24°から64.75°までであり,実際の測定結果か ら算出した角度と比較すると約-3°~+1.5°の幅が,これらの誤差を深さ1mに対応す
ると0.87m~1.17mまでの幅があることが確認できた.
表5.2 誤差の検討結果
𝜙𝑠 画素番号2645の深さ
測定から算出した値 63.03° 1.00m 誤差が最大となる組み合わせ 60.24°~64.75° 0.87m~1.17m
36
図5.1 深さ30㎝の箱にイメージングライダーのアクリルケースを乗せた様子
図5.2 図5.1の状態でレーザを射出し取得した画像
37
図5.3 図5.1の概要図
38 5.2 直線フィッティング窓の設定
減衰係数を導出する際,信号強度を区間に分割し直線フィッティングを行う.その区間を 移動式イメージングライダーの深さ分解能とする.適切な深さ分解能を決めるため 20 ㎝,
30 ㎝,40㎝,50㎝と区間を変え減衰係数を導出した.それぞれの深さ分解能で得られた 減衰係数の深さ分布を図5.4に示す.
区間が長くなるほどなだらかになるが,30 ㎝以上では減衰係数の大きな変動は見られな かった.深さ分解能は狭いほど細かな変動の観測が期待できるため,深さ分解能は30㎝に 設定し以降の解析を行うこととした。
図5.4 異なる深さ分解能(区間)に対する減衰係数推定値 (20cm:青 30cm:橙 40cm:黄 50cm:紫)
39 5.3 信号強度に現れるスパイク除去方法
第 4 章で得られた信号強度には撮影地点に関わらず水面の浅い部分に浮遊物質による散 乱が多くみられた.図5.5に浮遊物質による散乱を捉えた写真を示す.写真に写る浮遊物質 による輝点はランダムに出現し,それらの散乱が信号強度にスパイク状となって表れる.信 号強度からスパイクを除去するために,画像の列ごとに外れ値を検出し隣接する非外れ値 に置き換える処理を行った.図5.6にある列のスパイク除去前後の輝度値の比較を示す.ま た,アクリルケースの反射光の影響がみられたため,該当箇所は反射光の影響を受けていな い前後の値に置き換えている.
外れ値は,列の輝度値を対象に上位四分位数を四分位数間範囲の1.5倍を超える,または 下位四分位数を四分位数館範囲の1.5倍を下回る要素を検出している.図5.7に外れ値を除 去して積算した信号強度の深さ分布を示す.青線は除去前,橙線は除去後であり,スパイク 状の部分が除去できていることが確認できる.
図 5.7の除去前(青線)から除去後(橙線)を減算したグラフを図5.8に示す.このグラフか ら浮遊物質は0m~0.1m付近に多く見られ,0.2m,0.4m付近に浮遊物質が存在すると推測 できる.サンプリングした水にはプランクトンのような生物がいることが肉眼で確認でき たことから,図5.8は湖に存在するプランクトンなどの浮遊物質の深さ分布を示しているも のと考えられる.さらにレーザ幅と浮遊物質の幅の比を測定することにより物質特定の可 能性がある.
40
図5.5 浮遊物質による散乱とみられる画像
図5.6 ある列の輝度値の分布(外れ値除去前(青)と除去後(赤))
41
図5.7 浮遊物質の散乱スパイクがある信号強度の深さ分布(青:除去前 橙:除去後)
図5.8 除去したスパイクを積算した信号強度の深さ分布
42 5.4 地点別の減衰係数の深さ分布
図 4.6 に示す地点①から地点③で取得した画像から深さごとの減衰係数の推定値と推定 誤差を求めた.その結果を図5.9から図5.11にそれぞれ示す.また,地点①から地点③の 深さごとの減衰係数の推定値をまとめたグラフを図5.12に示す.
地点①は桟橋に近い場所である.図5.9では減衰係数は0.7m付近まではなだらかに減少 しているが,0.9m辺りで上がり,1m を過ぎたあたりで急激に増加している.深さ1m付 近に何らかの濁った水の層がある可能性がある.連続的な観測は約 1.4m 付近までとなる.
地点②の付近には湖の底から泡を出す装置「エアレーション」と呼ばれる装置が設置され おり,周囲の水を撹拌している.図5.10には浅い部分における減衰係数の変動は小さいが この場所で撮影した画像は地点①と地点③に比べ多くの浮遊物質が写っていることが肉眼 で確認できる.連続的な観測は1.8m付近までとなる.
地点③は浮島の近くである.図5.11より地点①,地点②に比べ浅い部分での変動が多い ことが分かる.1.6m付近で大きく値が下がり,連続的な観測は1.8m付近までとなる.
図5.12はすべての地点の減衰係数をまとめたグラフであり,浅い部分の減衰係数はどの 地点も大きな違いがないことがわかる.また1.2m~1.6mあたりで値が大きくなり,1.6mを 過ぎたあたりで大きく値が下がっていることが3か所で共通している.図5.13に相模湖の 地形図を示す.図5.13から測定地点の3か所は相模湖から水が下流に流れ出る地点である ことがわかり,この付近の水の流れは同一方向である可能性が高い.これらのことから測定
地点1.2m~1.6m付近に水の汚濁具合が高い層が存在する可能性がある.
43
図5.9 地点①の減衰係数の推定値(青)と推定誤差(赤)の深さ分布
図5.10 地点②の減衰係数の推定値(青)と推定誤差(赤)の深さ分布
44
図5.11 地点③の減衰係数の推定値(青)と推定誤差(赤)深さ分布
図5.12 深さごとの減衰係数の推定値(地点①:青 地点②:橙 地点③:黄)
45
図5.13 相模湖の地形図
(https://maps.gsi.go.jp/#15/35.611273/139.190898/&base=std&ls=std&disp=1&vs=c1 j0h0k0l0u0t0z0r0s0m0f1)
46 5.5 地点別の濁度の深さ分布
濁度は水の濁りの程度を表す指標の一つである.精製水にカオリンといった標準物質を 混ぜ,その濁り具合とサンプリング試料を比較することで濁度を測定する.濁度の測定方式 は視覚濁度,透過光濁度,散乱光濁度などさまざまであるため,測定装置が異なれば濁度も 異なる.透過光・散乱光方式では試料中に存在する大小さまざまな浮遊物質による散乱の影 響を受けやすく,濁度は一意に決まらないこともある.
濁度の単位の一つである NTU(Nephelometric Turbidity Unit)について,室内実験によ る濁度計と減衰係数の測定値の比較より,減衰係数を𝑦,濁度を𝑥としたとき以下の関係式 が示されている7).減衰係数が小さい場合を考慮して,参考文献8)と蒸留水の減衰係数を参 考に濁度が 3 以下の場合の式を新たに設けた.関係式を式(5.2)に示し,グラフにしたもの を図5.14に示す.
𝑦 = {0.4976𝑥 + 0.0573 (𝑥 < 3)
0.36𝑥 + 0.47 (𝑥 ≥ 3) (5.2)
(5.2)式を用いてイメージングライダーにより求めた減衰係数を濁度に変換した各地点の の深さ分布を図5.15から図5.17に,3つの地点の濁度の深さ分布を図5.18に示す.
屋外実験の最後に地点①において深さ0.5m付近を採水器でサンプリングし,濁度計を用 いて濁度を計測した.濁度計の仕様を表5.3に示す.用いた濁度計はLED850nmの光源に よる透過散乱光比較測定方式を用いている.透過散乱光比較測定方式は光源から試料に入 射した光を透過光・散乱光に分け,比率演算器により濁度を算出する方式である 10).サン プリングした水の濁度計測値は時間とともに変動し 3.13~4.91[NTU]という値が得られた.
直線フィッティングの窓を40㎝に変えて算出した地点①の濁度の深さ分布に濁度計の測 定値をプロットした図を図5.19に示す.濁度計測値と本装置の計測値は測定誤差範囲内で 一致し,本装置の有用性が示された.
47
図5.14 濁度(NTU)と減衰係数の対応
図5.15 地点①における濁度の深さ分布
48
図5.16 地点②における濁度の深さ分布
図5.17 地点③における濁度の深さ分布
49
図5.18 3つの地点における濁度の深さ分布
表5.3 濁度計の仕様
名称 サトテックデジタル濁度計
型番 TU-2016
測定範囲 0~1000[NTU]
分解能 0.01NTU(0~49.99) 1NTU(50~1000)
サンプル量 10ml
サンプリング時間 約1秒
反応速度 10秒以下
光源 LED 850nm
検知器 フォトダイオード
測定原理 透過散乱光比較測定方式
50
図5.19 フィッティング窓を40㎝にした時の地点①の濁度の深さ分布
51
第6章 まとめ
本研究では小型の箱にライダーシステムを搭載しボートで牽引可能な移動式イメージン グライダーを開発し屋外実験を行った.それに伴うライダー方程式の改良,背景光の除去 方法の確立,実験装置の設計に取り組み移動式イメージングライダーを開発,屋外での実 験で信号強度の取得と減衰係数と濁度の推定を行い,濁度計との比較から概ね良い結果が得 られた.
今後の課題として次の3つがある.
(1) 背景光による影響が少ない環境での計測
(2) カメラの焦点位置をすべての深さで同様に合わせる工夫 (3) 浮遊物質の解析
(1)今回の実験は夏の日中に行ったため日光の影響を受けやすい条件での計測であった.そ のため背景光自体の輝度値が大きく,変動も大きかった.同様の実験を夜間,または透明 度の高い環境で行えばより深い地点までの計測が期待できる.
(2)今回カメラのピントは深さ20㎝付近に合うように設定した.理想はすべての深さにピ
ントが合うことである.これについては今回使用したデジタルカメラでは不十分である.
より明るいレンズを持ったカメラがのぞましい。
(3)実験で得られた画像の中に浮遊物質が確認できた.これらは大小さまざまな大きさであ ったが,形状や大きさの推定は困難であった.しかし,例えばプランクトンの平均体長を 元に画像に写ったレーザ幅と比較して大きさを推定できる可能性がある.それが可能にな ればプランクトンの存在する層の詳細な分析が可能になり,イメージングライダーの長所 を活かすことができる.
これら3つの課題を解決し,観測地点やサンプリングを増やして計測データを増やすこ とでさらにシステムの信頼性を増していくことが期待できる.
更に将来的には,移動式イメージングライダーを自動操縦可能な船に牽引,またはイメ ージングライダーそのものを操縦可能にして遠隔操作することで,人が立ち入れないよう な場所での無人自動観測も可能になる.
52
謝辞
本研究を進めるにあたって,3年間親身にご指導いただいた阿保真教授に深く感謝の意 を表します.特に相模湖での2回の実験の際の準備やサポートがなければここまで研究を 進めることができなかったと思います.屋外での実験がとても良い経験になりました.本 当にありがとうございました.
53
参考文献
1) 東京湾リアルタイム水質データ,モニタリングポストの概要 (https://www1.kaiho.mlit.go.jp/monitoring/index.html)
2) 清水 匡,水中浮遊物質の鉛直分布計測のためのバイスタティックイメージングライ ダーに関する研究,首都大学東京修士論文,2017.
3) 目木 一男,三島 英嗣,川原 琢也,野村 彰夫,昼夜連続観測可能なバイスタテ ィックイメージングライダーの開発,レーザ研究,Vol25,No.12、pp875-879,
1997.
4) 株式会社ルケオ,偏光
(https://www.luceo.co.jp/sp/technical/pdf/henkou1-1.pdf)
5) 唐沢 好男,回帰分析と信頼区間~ばらつきの大きい少数データから誤った推論をしな いための~,Technical Report YK-019,2019.
(http://www.radio3.ee.uec.ac.jp/ronbun/YK-019_Kukan_Suitei.pdf)
6) GEMS/Waterナショナルセンター
(http://db.cger.nies.go.jp/gem/inter/GEMS/gems_jnet/station/sagami_site.html)
7) 成田 美穂,荒川 久幸,宅和 哲郎,森永 勤,現場用濁度計における性能の比 較,海洋調査技術,Vol.19,No.2,pp1-10,2007.
8) Panasonic,水中照明
(https://www2.panasonic.biz/ls/lighting/plam/knowledge/pdf/0224.pdf)