オントロジー技術に基づく航空交通情報共有の高度化
Ontology Technology for Advanced Air Traffic Information Sharing
江上周作
1∗呂暁東
1古賀禎
1住谷泰人
1Shusaku Egami
1Xiaodong Lu
1Tadashi Koga
1Yasuto Sumiya
1 1国立研究開発法人海上・港湾・航空技術研究所 電子航法研究所
1
Electronic Navigation Research Institute
Abstract: グローバルな航空交通管理(Air Traffic Management: ATM)では,航空機の運航に 係る飛行計画,監視,空港,気象,制約などの様々な情報をシステムや運航関係者間で共有するこ とが必要である.そこで,国際標準化された情報交換モデルを用いてシステム間でシームレスな情 報交換を実現できる System Wide Information Management (SWIM) の概念が国際民間航空機関 (International Civil Aviation Organization: ICAO)により提示されている.今後 SWIM 環境で様々 な情報が共有されることで,関係者の誰もが必要なときに必要な情報の効率的な利用や,離陸前・離 陸後における情報更新による状況認識機能が必要になると想定される.しかし,各種情報交換モデル 間の関連付けは不十分であり,異種情報間の横断的な連携は困難である.本稿では運航情報,航空情 報,気象情報の交換モデルについて,時空間的な記述を拡張して統一化したオントロジーを構築す る.これにより,飛行計画の作成を支援する関連情報の柔軟な検索機能の実現を目指す.
1
はじめに
現行の航空交通管理(ATM)では,航空機の運航に 係る飛行計画,空港,監視,航空気象,空域的制約など の様々な情報について,独立したシステムを使用して 各情報の提供者と利用者の間の 1 対 1 の情報交換を行っ ている.そこで,独立したシステムを連携させ,あらゆ る ATM 関連データについて多対多のシームレスな情報 配信を可能にする System Wide Information Manage-ment (SWIM)[6] の概念が,国際民間航空機間(ICAO) によって推進されている.米国連邦航空局(FAA)が主 導する NextGen1,欧州の Single European Sky ATMResearch (SESAR)2,国内では国土交通省航空局を中 心とした Collaborative Actions for Renovation of Air Traffic Systems (CARATS)3で SWIM の導入に向けた
検討が行われている.また,ICAO は SWIM 環境にお ける ATM 運用のための要件を定義した,Flight and Flow - Information for a Collaborative Environment (FF-ICE)[4] の概念を提示している.現行の ATM 関連 情報は一部の二国間での情報交換を除き,構造化され ていない短いテキストメッセージが交換されている.こ れに対し,FF-ICE では SWIM 上で運航に係る情報を ∗連絡先:国立研究開発法人海上・港湾・航空技術研究所 電子航 法研究所 〒 182-0012 東京都調布市深大寺東町 7-42-23 E-mail: [email protected] 1 https://www.faa.gov/nextgen/ 2https://ec.europa.eu/transport/modes/air/sesar_en 3http://www.mlit.go.jp/koku/koku_fr13_000006.html XML 形式の標準フォーマットで交換するため,多種多 量の情報をシステムにより自動的に処理することが可 能になる. 現在,運航情報,航空情報と気象情報に対して3つ の標準情報交換モデルが開発されている.しかし,開 発した組織や対象範囲などが異なるため,モデル間の 関連付けが不十分であり異種情報間のシームレスな連 携は困難である.異種情報間の連携により,SWIM 利 用者が必要な情報やその関連情報を横断的に検索する ことや,情報更新時における影響伝搬を考慮した飛行 計画,飛行中の迅速な経路変更の効率化等が可能にな る.そこで,本研究ではこれらの情報交換モデルにつ いて時空間表現の拡張と統一化,システムでの利活用 を考慮して Web Ontology Language (OWL) 形式のオ ントロジーを構築した.また,これらのオントロジーに 基づく Resource Description Framework (RDF) デー タを RDF ストアに蓄積し,ルールによる時空間的な 関係補完を行った.さらに,関係補完された RDF スト アから SPARQL Protocol and RDF Query Language (SPARQL) と推論により,飛行計画に影響する情報の 検索実験を行い,結果を考察した. 以降,2 章では関連研究について述べ,3 章では各情 報交換モデルに基づくオントロジーの構築について述 べる.4 章でオントロジーの SWIM 環境への導入につ いて述べる.5 章で本研究を考察し,最後に 6 章でむ すびとする. 02-01
場予報気象通報式(TAF)や特別気象情報(SIGMET) などの気象情報に関しては,ICAO Meteorological In-formation Exchange Model (IWXXM)[5] が使用され る.これらの情報交換モデルは XML スキーマで定義さ れており,XML 形式のデータがサービス間で交換され る.さらに,ATM 関連の参照語彙として ATM Infor-mation Reference Model (AIRM)6が定義されている. SESAR プロジェクトの一つである BEST プロジェク ト7は,SWIM の効力を最大限に引き出すために,オン
トロジーや推論などのセマンティック技術を活用した研 究を行っている [9][12].BEST プロジェクトでは標準 フォーマットの Web Ontology Language (OWL)8化,
情報をコンテナ化してメタデータを付与する Semantic Container の定義,Semantic Container の推論実験な どを行っており,SWIM におけるセマンティック技術の 有効性を示している.BEST プロジェクトでは AIRM と AIXM を対象に XSL Transformations (XSLT) によ り OWL に変換している.したがって,構築した OWL の表現能力は XML スキーマとほぼ同等であり,推論 機能を活用するためには Semantic Container の定義と 別途 Semantic Web Rule Language (SWRL)[3] によ る推論ルールを使用する.また,IWXXM に関しては TAF と METAR のみを対象に手動で OWL 化してお り,AIXM, AIRM と同様に表現能力は XML スキー マとほぼ同等である.BEST プロジェクトでは同種の データを含むコンテナ間の関連付けをしているが,異 種データの関連付けはしておらず,情報更新時におけ る異種データ間の影響認識が課題である. 一方で,FAA はセマンティック Web 技術を使用して 開発された成果を公開するための語彙 semantics.aero9 を提供している.これは SWIM 環境で使用される基 本的な語彙やタクソノミーを SKOS[11] を用いて記述 したものである.また,FAA は Service Oriented Ar-chitecture (SOA) に基づく SWIM のサービス間連携に 向けた,Web Service Description Ontological Model
4https://www.fixm.aero/ 5http://aixm.aero/ 6http://airm.aero/ 7https://project-best.eu/ 8https://www.w3.org/OWL/ 9 https://semantics.aero/ 図 1: SWIM のレイヤ構成 [6] (WSDOM) を定義している10.WSDOM はサービスに 関する主要な概念をカバーしており,セマンティック Web サービス記述オントロジーの OWL-S11で記述さ れている [7].さらに,WSDOM を拡張した地理空間 情報のサポートに向けた議論12が行われたが,FIXM, AIXM, IWXXM の横断的な連携については議論不足 である.
3
オントロジーの構築
3.1
航空交通情報交換モデルの OWL 化
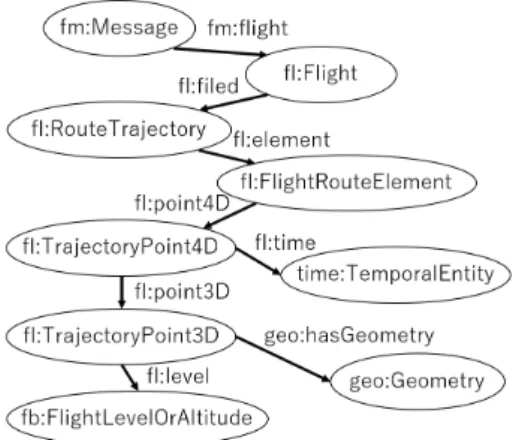
本研究では,SWIM で使用される各種情報交換モデ ルに基づくオントロジーを構築し,SWIM 環境におけ る情報共有・情報検索の高度化を目指す.本研究で構築 した OWL 形式のオントロジー間の関係を図 2 に示す. 白色の円は既存のオントロジーであり,青色の円は本研 究で新たに構築したオントロジーである.青色の太線は 本研究で新たに追加した関係であり,点線はルールによ り補完される関係である.本研究では,FIXM の XML スキーマに基づくオントロジー(FO)と,IWXXM の XML スキーマに基づくオントロジー(IWMO)を,オ ントロジーエディタの Prot´eg´e[8] を使用して次に示す 手順で構築した. (1) Base URI を定義する. (2) 単純型,複合型要素の name 属性値を参考に OWL クラスを作成する. (3) 型の制約記述に基づいて OWL クラスの制約を部 分公理として定義する. 10https://www.faa.gov/air_traffic/technology/swim/ governance/service_semantics/ 11https://www.w3.org/Submission/OWL-S/ 12 http://docs.opengeospatial.org/per/16-039.html図 2: 構築したオントロジー間の関係図
– 制約記述内における element 要素および
at-tribute 要素の name 属性値を (2) の OWL クラスの制約対象プロパティとし,type 属 性値をプロパティの値域とし,その他属性 値に基づいて全称量化,存在量化,個数制 約を定義する. – 制約記述内で type 属性値が時間情報に関す る型である場合,Time Ontology から該当 するクラスを選択して値域とする. – 制約記述内で type 属性値が地理空間情報で ある場合,GeoSPARQL Ontology から該当 するクラスを選択して値域とする. – 制約記述内で type 属性値がその他外部 XML スキーマの型である場合,対応する既存オ ントロジーを参照し,該当するクラスを値 域とする.既存オントロジーが無い場合や 制約に矛盾する場合は,その XML スキー マに基づいて本手順を (1) から実行する. (4) 型の制約記述が列挙型である場合,クラスの外延 メンバーのインスタンスを作成して列挙し,OWL クラス制約を完全公理として定義する. (5) 拡張元の型がある場合にその型名を元に (2) の 上位クラスとして定義し,(3) 以降の処理を実行 する. – 拡張元の型が外部 XML スキーマの型である 場合,対応する既存オントロジーを参照し て該当するクラスを上位クラスとする.既 存オントロジーが無い場合や制約に矛盾す る場合は独自に OWL クラスを作成する. (6) annottion 要素内に参考 URL が記述されている 場合,その情報を参考に対応する既存オントロ 図 3: FO における軌道情報に係るクラス関係の一部 ジーを参照して代替する.既存オントロジーが無 い場合や制約に矛盾する場合は独自にクラスを作 成する. FO における軌道情報に係るクラス関係の一部を図 3 に示す.FO において Flight クラスは運航情報を意味す る.Flight クラスは提出された飛行経路の軌道情報と して RouteTrajectory クラスが関連付けられており, FlightRouteElement クラスは軌道内の通過点である. この通過点の四次元情報として TrajectoryPoint4D クラスが関連付けられている.FO の元となる FIXM の XML スキーマでは,TrajectoryPoint4D 型の要素 が通過予定時刻,緯度経度,高度の情報を直接持つ構 造となっている.また,後述する AIXM OWL (AO), IWMO では時間と空間,空間と平面を分けた構造となっ ている.そこで,本研究では FIXM,AIXM,IWXXM の連携に向けて,時空間的な情報を時間と空間,空間 と平面に分ける表現に統一し,空間情報のみを持つ TrajectoryPoint3D クラスを新たに定義した. IWMO についても,具体的な時間を表すプロパティの 値域には一貫して Time Ontology の TemporalEntity クラスを定義した.また,空域表現に関しては後述す る AO を採用しており,具体的な地理空間表現は AO 内で拡張する. BEST プ ロ ジェク ト に よ る AO に つ い て ,本 研 究 で は 地 理 空 間 表 現 と し て GeoSPARQL,時 間 表 現として Time Ontology を使用し,時空間的な表 現力を拡張した.例えば,空域容量(Airspace Vol-ume)が水平方向の投影情報を持つことを意味する AirspaceVolume-horizontalProjection プ ロ パ テ ィ(以下,horizontalProjection)は,GeoSPARQL Ontology の hasGeometry プロパティのサブクラスと して定義し,値域を Surface クラスのインスタンスと して定義している.また,Surface クラスのインスタ ンスは GeoSPARQL Ontology の asWKT プロパティを 持ち,その値が全て,ジオメトリオブジェクトを地図
このように時空間表現を FO,AO,IWMO 間で統一 化することで,それぞれの事象が異なる事象に与える 影響を四次元,三次元,二次元と分けて関連付ける事 ができる.したがって,空間的な影響や時間的な影響 を分けて検索する際に利便性が向上する.
3.2
包括的なオントロジーの試作
構築した各情報交換モデルのオントロジーには,意味 や用途が類似する語彙が存在する.例えば,時間を表す プロパティについては fl:time,aixm:AIXMFeature-timeSlice,oml:phenomenonTime が,各情報交換モ デルのオントロジーで定義されており,その定義域 はそれぞれ fl:TrajectoryPoint4D,aixm:Airspace, sigmet:EvolvingMeteorologicalCondition である. したがって,時間情報に関して異なる情報源から横断的 に検索を行いたい場合に,ユーザは各オントロジーにお ける使用語彙と構造を把握しなければならず,SPARQL 検索においてもクエリが冗長化してしまう.そこで,こ れらのプロパティやクラスを抽象化した包括的なオン トロジーを構築し,RDFS や OWL 推論を活用して検 索の利便性の向上を目指す.ここで,包括的なオント ロジーとはあくまで異種情報間の横断的な検索におけ る利便性を重視し,各情報交換モデルのオントロジー をスキーマレベルで統一化するものである.本研究で は FO,AO,IWMO に関する包括的なオントロジーを 試作した. 図 4 に包括的なオントロジー(以下,XMO)のク ラス階層を示す.各情報交換モデルのオントロジーに は共通してメッセージを意味するクラスが存在するた め,xm:Message はこれらのクラスの上位クラスとし て定義している.xm:SpatiotemporalObject は全て の時間的または空間的なクラスの上位クラスとして定 義しており,そのサブクラスとして二次元(xm:2D), 三次元(xm:3D),四次元(xm:4D),鉛直成分(xm: VerticalObject)のクラスを新たに定義している.図 5 に XMO のプロパティ階層を示す.同種のプロパティ を抽象化した上位プロパティ(xm:hasTime,xm:has3D, xm:has4D,xm:hasVerticalDistance)を定義してい 図 4: XMO のクラス階層 る.ここで,xm:has4D と xm:hasVerticalDistance については,サブプロパティについても一部新たに定 義する必要がある.例えば,xm:has4D は定義域が xm: Message,値域が xm:4D であるが,FO,AO,IWMO のそれぞれでメッセージに関するクラスのインスタン スを始点として,四次元情報クラスのインスタンスに 達するまでに経由するプロパティパス数は異なる.し たがって,単に FO,AO,IWMO で同種のプロパティ を抽象化することはできない.そこで,OWL のプロパ ティチェーン公理を用いて sigmet:analysis-result, fm:flight-filed-element-point4D プロパティを新 たに定義し,メッセージ情報から四次元情報までに経由 するプロパティパス数を ao:hasMember と統一した.ま た,AO に鉛直方向の範囲を意味する中間クラス aixm: VerticalRange と aixm:verticalRange プロパティを 新たに定義し,三次元情報から高度情報までのプロパ ティ数を fl:level と統一した. さらに,四次元・三次元・二次元的な包含関係を意 味するプロパティを xm:contains のサブプロパティと して定義し,メッセージ間の四次元・三次元・二次元+ 時間的な影響関係を意味するプロパティを xm:affect プロパティのサブプロパティとして定義している.こ れらのプロパティは 4.3 節で述べる異種情報間の関係 補完に使用する.ここで,時空間的な包含・影響関係 のプロパティについては階層関係を定義しないことと した.例えば,異なる2つの事象間に四次元的な包含 関係があることは三次元的,二次元的にも包含関係が あると言える.しかし,推論を使用した SPARQL 検索 時に得られる結果が冗長となることから,これらのプ ロパティの階層関係は定義しないこととした.図 5: XMO のプロパティ階層
4
SWIM
デモシステムにおけるオ
ントロジーの応用例
4.1
SWIM デモシステムの構成
これまでの研究で我々は SWIM デモシステムを構 築し,シナリオベースによる FF-ICE 検証実験を行っ ている [10].本研究では図 6 に示すシステム概要図の 通りに SWIM デモシステムを拡張した.SWIM デモ システムでは,航空機の運航に係る情報を外部サービ スまたは監視システムより取得し,各種情報交換モデ ルに基づいて変換する.変換されたデータを Messag-ing Infrastructure により各システムやユーザに配信 する.Messaging Infrastructure は Advanced Message Queuing Protocol (AMQP) による Publish/Subscribe や Representational State Transfer (REST) による Re-quest/Reply を利用して,システム間の情報交換を実現 する.配信されたデータを RDF 生成器がオントロジー に基づいて RDF 化し,RDF ストアに格納する.RDF ストアには Ontotext GraphDB13を使用している. 13 https://www.ontotext.com/products/graphdb/ 図 6: 拡張した SWIM デモシステムの概要図4.2
オントロジーに基づく RDF データの
生成
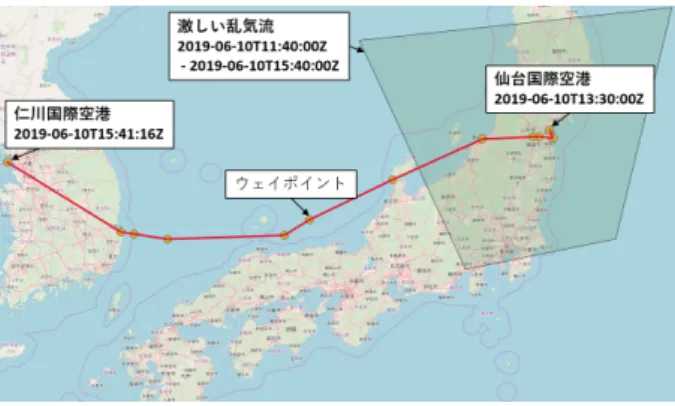
本研究では 2019 年 5 月 29 日から 6 月 24 日の約一ヶ 月間,国内における NOTAM と SIGMET のデータを 収集し,11,104 トリプルの RDF を生成し RDF ストア に蓄積した.なお,NOTAM は緯度経度情報が取得でき る制限空域に関するデータ(Special Active Airspace: SAA)を対象とした.また,運航情報に関しては取得 が困難であるため,6 月 10 日 13 時 30 分仙台国際空港 発,15 時 41 分仁川国際空港着の仮の FIXM シナリオ データを基に RDF を生成し,RDF ストアに格納した.4.3
異種情報間の関係補完
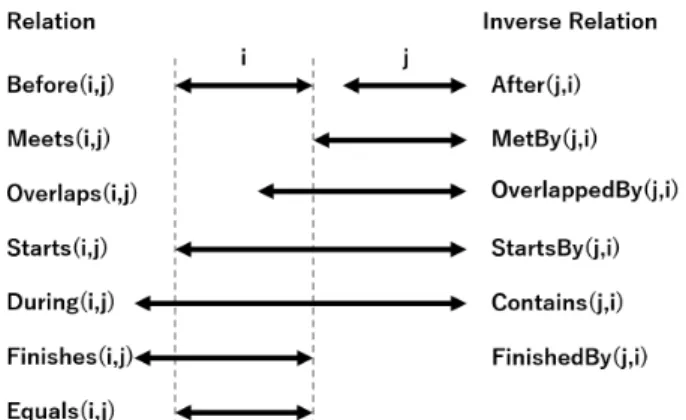
4.2 節で述べた RDF データについて,位相的な時間 関係を Time Ontology のプロパティを使用して補完し, ジオメトリ間の空間的関係を GeoSPARQL Ontology のプロパティを使用して補完する,異種情報間の関連 付けの手法について述べる.これらの定性的な関係を 追加することで検索時の利便性が向上し,さらには定 性時空間推論も可能になる. 4.3.1 位相的な時間関係の補完Time Ontology において位相的な時間関係は Allen らの定義 [1](図 7)に基づいており,before, meets, overlaps などの 13 種類の関係に対応するプロパティが 用意されている.また,3 章で述べた通り,時間情報に ついては全て Time Ontology を使用しているため,例 えば次の SPARQL クエリを使用して位相的な時間関 係を補完することが可能である. C O N S T R U C T {? t i m e 1 t i m e : i n t e r v a l O v e r l a p s ? t i m e 2 . } W H E R E { ? t i m e 1 t i m e : h a s B e g i n n i n g / t i m e : i n X S D D a t e T i m e ? t i m e 1 B e g i n ; t i m e : h a s E n d / t i m e : i n X S D D a t e T i m e ? t i m e 1 E n d .
図 7: 位相的な時間関係(Allen’s Temporal Relations) 図 8: RCC8 ? t i m e 2 t i m e : h a s B e g i n n i n g / t i m e : i n X S D D a t e T i m e ? t i m e 2 B e g i n ; t i m e : h a s E n d / t i m e : i n X S D D a t e T i m e ? t i m e 2 E n d . F I L T E R (? t i m e 1 != ? t i m e 2 ) F I L T E R ((? t i m e 1 B e g i n < ? t i m e 2 B e g i n ) && (? t i m e 1 E n d < ? t i m e 2 E n d ) && (? t i m e 2 B e g i n < ? t i m e 1 E n d ) ) } これは時間間隔リソース time1 が別の時間間隔リソー ス time2 と重複する間隔がある場合に,time1 と time2 を time:intervalOverlaps プロパティで関連付けし たトリプルを生成するというルールに相当する.さら に,Time Ontology では位相的な時間関係のプロパティ について逆関係(owl:inverseOf)を定義しているた め,一方の関連付けを行うとその逆関係が OWL 推論 により補完される.そこで,本研究では同値関係を含 む 7 種類の位相的な時間関係と,時間間隔と瞬間の関 係(time:inside)を補完するルールを定義し,この ルールに相当する SPARQL クエリを実行した. 4.3.2 ジオメトリ間の空間的関係の補完 定性空間表現と推論には,2 つの空間的領域間にお ける 8 通りの基本関係を定義した Region Connection Calculus である RCC8(図 8)が用いられることが多 い.SOWL[2] は RCC8 に基づいた OWL として提案さ れ,定性空間的表現と推論を可能にする.GeoSPARQL Ontology は RCC8 に対応する 8 通りの関係に,交差 (¬DC)を意味する intersects を加えた 9 通りの空間 geo : h a s G e o m e t r y ? p o i n t . ? p o i n t geo : a s W K T ? p o i n t W K T . F I L T E R ( g e o f : s f C o n t a i n s (? surWKT ,? p o i n t W K T ) ) } これは,ある空域容量の水平方向の投影情報リソース surface が,飛行経路上の通過点リソース point3D を空間的に含む場合,surface と point3D を geo: sfContains プロパティで関連付けしたトリプルを生 成するというルールに相当する.このようなクエリに より他の空間的関係についても補完した. また,航空交通においては平面的な関係だけでなく, 高度を追加した三次元の関係を考慮する必要がある. SOWL や GeoSPARQL などの既存のオントロジーは 平面的な関係しか考慮していないため,三次元的な関 係を記述することはできない.そこで,三次元の包含 関係を意味する xm:3D-contains プロパティを XMO で定義し,次の SPARQL クエリを使用して三次元の包 含関係を補完した. P R E F I X xm : < h t t p :// www . s w i m . e n r i . go . jp / o n t o l o g y / XM . owl # > C O N S T R U C T { ? asv xm :3 D - c o n t a i n s ? p o i n t 3 D . } W H E R E { ? asv a i x m : A i r s p a c e V o l u m e -h o r i z o n t a l P r o j e c t i o n ? s u r f a c e ; a i x m : A i r s p a c e V o l u m e - u p p e r L i m i t / rdf : v a l u e ? ul . ? s u r f a c e geo : a s W K T ? s u r W K T . ? p o i n t 3 D a f i x m : T r a j e c t o r y P o i n t 3 D ; f i x m : f l i g h t L e v e l O r A l t i t u d e / f i x m : f l i g h t L e v e l / f i x m : f l i g h t L e v e l O r A l t i t u d e V a l u e ? fl ; geo : h a s G e o m e t r y ? p o i n t . ? p o i n t geo : a s W K T ? p o i n t W K T . O P T I O N A L { ? asv a i x m : A i r s p a c e V o l u m e - l o w e r L i m i t / rdf : v a l u e ? ll . F I L T E R (? ll < ? fl ) } F I L T E R (? fl < ? ul ) F I L T E R ( g e o f : s f C o n t a i n s (? surWKT ,? p o i n t W K T ) ) } 同様に四次元的な包含関係についても,上記クエリ に時間的な包含関係の条件を追加し,xm:4D-contains プロパティを使用して補完した. 4.3.3 メッセージ間の関係補完 4.3.1 節,4.3.2 節では時間的・空間的な関係につい て,対象となる時間リソースやジオメトリリソースの 間の関係を補完した.これらの関係は,ある事象間が
図 9: 飛行計画シナリオ(RJSS–RKSI) 具体的にどの時空間的な位置で関係があるか検索する 際に使用する.さらに,情報源となるメッセージレベ ルでの影響関係を補完することで,情報更新時の影響 伝搬を考慮した検索が可能になる.そこで,メッセー ジ間の四次元的な影響を意味する xm:4D-affect プロ パティを定義し,次の SPARQL クエリにより関係を補 完した. C O N S T R U C T { ? m s g 1 xm :4 D - a f f e c t ? m s g 2 } w h e r e {{ ? m s g 1 s i g m e t : a n a l y s i s ? obs . ? obs om : r e s u l t ? e m c O r A s . } u n i o n { ? m s g 1 aeo : h a s M e m b e r ? e m c O r A s .} ? e m c O r A s xm :4 D - c o n t a i n s ? p4d . ? e l e m f i x m : p o i n t 4 D ? p4d . ? t r a j f i x m : f l i g h t R o u t e E l e m e n t ? e l e m . ? f l i g h t f i x m : f i l e d ? t r a j . ? m s g 2 f i x m : f l i g h t ? f l i g h t . } これにより,ある AIXM または IWXXM メッセージの 情報 msg1 が FIXM メッセージの情報 msg2 に四次元的 に影響を与えるという関係が追加される.この関係は, 飛行経路を変更する必要性が高いことを意味している. 同様に,メッセージ間の三次元的な影響関係を意味す る xm:3D-affect プロパティを定義し,SPARQL クエ リにより関係を補完した.
4.4
運航関連情報の検索例
図 9 に示す 6 月 10 日 13 時 30 分仙台国際空港(RJSS) 発,15 時 41 分仁川国際空港(RKSI)着の飛行計画シ ナリオに関して,四次元的に衝突する事象に関するメッ セージを次の SPARQL クエリにより検索が可能である. S E L E C T D I S T I N C T ? m s g 1 ? m s g 2 W H E R E { ? m s g 1 xm :4 D - a f f e c t ? m s g 2 . ? m s g 2 f i x m : f l i g h t / f i x m : g u f i " c 9 4 b d e b 0 -9 c32 - 4 3 2 a - a7d6 - 0 5 5 5 b 6 9 d 0 8 0 d " . } 飛行計画の指定には GUFI を使用している.結果とし て,図 9 に示した 1 件の特別気象情報(激しい乱気流) が該当し,この飛行計画は再設計が必要であることが 確認できた.Intel Xeon CPU E5-2660,メモリ 64GB の Windows サーバ上で実験を行い,検索実行時間は 0.1 秒以内であった.さらに次の SPARQL クエリによ り,飛行時間後に飛行経路上のウェイポイントに影響を 与える事象のメッセージを検索することが可能である. S E L E C T D I S T I N C T ? m s g 1 ? m s g 2 W H E R E { ? m s g 1 xm : h a s 4 D / xm : h a s T i m e ? i n t e r v a l 1 . ? m s g 2 fm : f l i g h t ? f l i g h t . ? f l i g h t fl : g u f i " c 9 4 b d e b 0 -9 c32 - 4 3 2 a - a7d6 - 0 5 5 5 b 6 9 d 0 8 0 d " ; fl : f i l e d / fl : r o u t e I n f o r m a t i o n / xm : h a s T i m e ? i n t e r v a l 2 . ? i n t e r v a l 1 t i m e : a f t e r ? i n t e r v a l 2 . ? m s g 1 xm :3 D - a f f e c t ? m s g 2 . F I L T E R NOT E X I S T S {? m s g 1 xm :4 D - a f f e c t ? m s g 2 }} この結果,6 件の特別気象情報が該当した.検索実行時 間は 0.1 秒以内であった.これらの特別気象情報によ る飛行経路の変更は生じないが,気象予報が変更され て当初の予報よりも早く特別気象が訪れた場合や,離 陸遅延が発生した場合には飛行経路の変更が求められ る場合がある.5
考察
構築したオントロジーと参照したオントロジー,約 一ヶ月間の NOTAM および SIGMET 情報の RDF, FIXM シナリオデータの RDF を全て RDF ストアに 格納した時の総トリプル数は 56,162 となった.また, 4.3 節で述べたルールによる補完後の総トリプル数は 82,686,RDFS 推論および OWL 推論された後の総ト リプル数は 262,868 となった.時空間的な関係補完,お よび推論後のデータを対象とした検索については全て 1 秒以内で実行可能であった.NOTAM や SIGMET の 有効期間は平均して二週間程度であるため,検索対象 とする RDF ストアには常に同程度のデータ量を保持す ることを想定すると,本研究の SWIM デモシステムは ある程度実現可能性があると考える.しかし,上述の 通り推論によるトリプル数の膨張率は三倍程度であり, 今後データの収集領域や種類を増加した際に,推論に よる膨張率と検索性能を改めて評価する必要がある. また,本研究では運航情報交換モデルのオントロジー 構築において,飛行経路上のウェイポイントごとに三 次元クラス(TrajectoryPoint3D)を設計した.現在, 飛行経路についてはウェイポイント主体の情報交換が 行われているため,本研究で述べた検索機能は SWIM 実環境での実現可能性が高く有用性があると考える.今 後の協調的な運航環境では,予め計画された四次元軌道 に基づいて飛行する軌道ベース運用(Trajectory Based Operation: TBO)の実現が期待されている.TBO で は飛行経路をウェイポイントだけでなく線やトンネル として考慮する必要がある.これに対して,今後ウェ イポイント間の線やトンネルも考慮したクラスを設計 し,時空間的な情報を関連付けることを検討する. また,本研究では検索の利便性を重視して各情報交 換モデルの包括的なオントロジー(XMO)を試作し,共有の高度化に向けて,各種情報交換モデルの時空間 表現を拡張したオントロジーを構築した.また,各オ ントロジーに関する包括的なオントロジーを試作した. さらに,オントロジーに基づいて RDF データを生成 して蓄積する仕組みを SWIM デモシステムに導入し, 異種情報間の時空間的な関係をルールにより補完した. オントロジーの応用例の一つとして,情報間の影響や 時空間的な影響が柔軟に検索可能になったことを示し た.今後,収集対象のデータと飛行計画シナリオを増 加して検索性能の評価を行うとともに,TBO に向けた オントロジーの拡張と洗練,様々な応用について検討 する.
謝辞
本研究は JSPS 科研費 19H04168 の助成を受けたも のです.参考文献
[1] James F. Allen. Maintaining knowledge about temporal intervals. Commun. ACM, Vol. 26,
No. 11, pp. 832–843, 1983.
[2] Sotiris Batsakis and Euripides GM Petrakis. Sowl: a framework for handling spatio-temporal information in owl 2.0. In International
Work-shop on Rules and Rule Markup Languages for the Semantic Web, pp. 242–249, 2011.
[3] Ian Horrocks, Peter F Patel-Schneider, Harold Boley, Said Tabet, Benjamin Grosof, Mike Dean, et al. Swrl: A semantic web rule language com-bining owl and ruleml. W3C Member submission, Vol. 21, No. 79, pp. 1–31, 2004.
[4] ICAO. Manual on Flight and Flow -
Informa-tion for a Collaborative Environment. ICAO Doc
9965. ICAO, 2012.
2016.
[8] Holger Knublauch, Ray W. Fergerson, Natalya F. Noy, and Mark A. Musen. The prot´eg´e owl plu-gin: An open development environment for se-mantic web applications. In The Sese-mantic Web
– ISWC 2004, pp. 229–243, 2004.
[9] Ilko Kovacic, Dieter Steiner, Christoph Schuetz, Bernd Neumayr, Felix Burgstaller, Michael Schrefl, and Scott Wilson. Ontology-based data description and discovery in a swim environment. In 2017 Integrated Communications, Navigation
and Surveillance Conference (ICNS), pp. 5A4 1–
13, 2017.
[10] Xiaodong Lu, Kazuyuki Morioka, Tadashi Koga, and Yasuto Sumiya. Collaborative flight and flow information exchange to achieve semless air traffic management operation. In Proceedings
of IEEE 14th International Symposium on Au-tonomous Decentralized Systems, pp. 135–140,
2019.
[11] Alistair Miles, Brian Matthews, Michael Wilson, and Dan Brickley. Skos core: simple knowledge organisation for the web. In International
Con-ference on Dublin Core and Metadata Applica-tions, pp. 3–10, 2005.
[12] B. Neumayr, E. Gringinger, C. G. Schuetz, M. Schrefl, S. Wilson, and A. Vennesland. Se-mantic data containers for realizing the full po-tential of system wide information management. In 2017 IEEE/AIAA 36th Digital Avionics
![図 5: XMO のプロパティ階層 4 SWIM デモシステムにおけるオ ントロジーの応用例 4.1 SWIM デモシステムの構成 これまでの研究で我々は SWIM デモシステムを構 築し,シナリオベースによる FF-ICE 検証実験を行っ ている [10].本研究では図 6 に示すシステム概要図の 通りに SWIM デモシステムを拡張した.SWIM デモ システムでは,航空機の運航に係る情報を外部サービ スまたは監視システムより取得し,各種情報交換モデ ルに基づいて変換する.変換されたデータを Mess](https://thumb-ap.123doks.com/thumbv2/123deta/8249182.1284469/5.892.462.804.146.350/デモシステムントロジーデモシステムシナリオベース.webp)