LSTM
による力覚データを用いた把持物体の識別
山崎雅幸
*
,山下隆義,山内 悠嗣,藤吉 弘亘
(
中部大学
)
Identification of grasped object using force data by LSTM
Masayuki Yamazaki, Takayoshi Yamashita, Yuji Yamauchi,Hironobu Fujiyoshi (Chubu University)
1.
はじめに
本研究では,力覚センサより取得したデータを用いてロボッ トが把持した物体の識別を目的とする.力覚センサはロボット に接触を用いて精密な作業を行わせるために使用されており, ハンドにかかる微細な力を計測することができる.力覚センサ の出力は時系列データであり,一般的なニューラルネットワー クでは連続的な変化を捉えることができない.そこで,本研 究では系列データから有用な特徴を捉えることが可能なLong
Short Term Memory(LSTM)を用いて,把持物体の識別を実
現する.
2.
力覚センサと電流フィードバック
力覚センサはロボットに触覚を付与させる目的で,様々な ロボットに装備されている.力覚センサは図1に示すように センサ上部と下部との力の変位を計測し,静電気容量の変化 から変位を計測し力とモーメントを求める.取得できるデー タは力ベクトル(F x, F y, F z)と回転ベクトル(M x, M y, M z) を合わせた6軸のデータである.
Fy
Fz
FxMx
Mz My
Fig. 1 Measurement of force data
図2に2つのアイテム(book,mailer)を把持し,ロボット アームを左右に動作させ停止した後の力覚値F yの遷移を示 す.形状が似ていてもセンサ値の変動が異なることが分かる.
Fig. 2 Comparison of force data
電流FBは,アームが動作する際に関節のモータの電流を 測定した値である.そのため,電流FBは動作や姿勢維持する ための値なので,物体ごとに影響を受けたロボットの状態を取 得できる.取得されるデータは6軸関節に流れる電流データ (J1, J3, J3, J4, J5, J6)である.
3.
提案手法
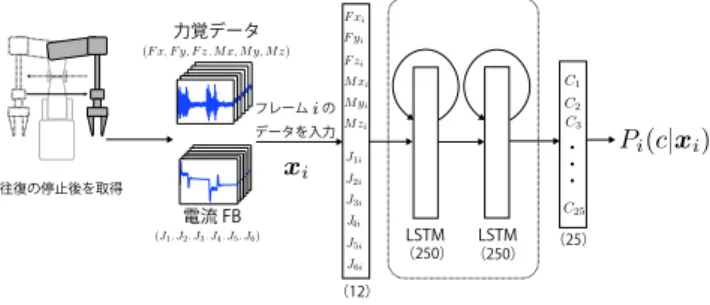
提案手法では,ロボットハンドを動作させ,停止させた後 のセンサの値をLSTMを用いて学習する.入力データは図3 のように,停止後100フレームを用い出力されたクラス確率 P(c|xi)は100フレーム分を統合し最終結果を求める.
Fig. 3 Network configuration
4.
評価実験
力覚センサを用いた把持物体の識別の有用性を示すために評 価実験を行う.本実験では,Amazon Picking Challenge 2016 データセットの25アイテムを対象とする.
取得する動作シーンはロボット座標系でX,Y,Zの3軸方 向へ往復させたデータを,学習用データ3,326セット,評価用 データは375セットを使用する.
表1に示すように,力覚センサと電流FBを用いることで, 25アイテムに対して約85%の識別性能を実現した.
さらに,剛体の識別率が高いため非剛体クラスを作成する ことで,約90.1%の識別性能を得た.
Table 1 Discrimination rate[%]
入力 力覚センサ 電流FB 力覚センサ+電流FB 識別率 79.7 4.0 85.3
Fig. 4 Confusion matrix
5.
おわりに
本研究では,画像を用いないアプローチとして,力覚セン サによる把持物体の識別法を提案し,その有効性を示した.力 覚センサと電流FBを用いることで,25アイテムに対して約 85%の識別性能を実現した.さらに,剛体の識別率が高いため 非剛体クラスを作成することで,約90.1%の識別性能を得た.