博 士 論 文
配 管 の 外 周 を 移 動 す る
ヘ ビ 型 ロ ボット の モ ー ション 設 計
2018 年 9 月
斉 偉
岡 山 大 学 大 学 院
自 然 科 学 研 究 科
I would like to dedicate this thesis to my wife and my entire family.
配 管 の 外 周 を 移 動 す る ヘ ビ 型 ロ ボット の モ ー ション 設 計 斉 偉
論 文 要 旨 :
本 研 究 で は ,ヘ ビ 型 ロ ボット が 配 管 の 外 周 に 沿って 移 動 す る モ ー ション の 設 計 を 研 究 対 象 と す る .特 に ,配 管 の 外 周 に フ ラ ン ジ や 分 岐 点 な ど の 障 害 物 が あった 場 合 に ヘ ビ 型 ロ ボット が 障 害 物 を す り 抜 け る 振 る 舞 い を 提 案 し ,新 た な 移 動 モ ー ション の 設 計 な ら び に 実 験 の 結 果 を 示 す.
ヘ ビ 型 ロ ボット は 細 長 い 体 幹 を 活 か し て ,人 間 の 手 や 目 の 届 か な い 場 所 へ ア ク セ ス す る こ と が で き る .例 え ば ,プ ラ ン ト 配 管 の 外 部 や 内 部 と 言った 狭 隘 で 複 雑 な 三 次 元 環 境 を 移 動 し て 点 検 や 調 査 を す る ロ ボット と し て 活 用 す る 期 待 が あ る .特 に 配 管 の 外 部 を 移 動 す る こ と を 考 え た 場 合 ,ロ ボット に は 配 管 の フ ラ ン ジ や 分 岐 点(T 字 分 岐 点 な ど) と いった 障 害 物 を す り 抜 け る こ と が で き る 移 動 モ ー ション が 必 要 と な る .し か し な が ら ,ヘ ビ 型 ロ ボット に よ り 配 管 の 外 周 に あ る 障 害 物 を 乗 り 越 え る こ と に 関 す る 研 究 報 告 は 少 な い .本 研 究 で は ヘ ビ 型 ロ ボット の 多 様 な 移 動 形 態 を 生 か す た め ,ピッチ と ヨ ー の 関 節 を 交 互 に 連 結 し て 構 築 さ れ て い る 一 般 的 な ヘ ビ 型 ロ ボット を 使 用 す る が ,一 般 的 な ヘ ビ 型 ロ ボット で 配 管 外 部 の 障 害 物 を 乗 り 越 え る 研 究 は 世 界 初 で あ る .本 研 究 で は 以 下 の 二 つ の 新 た な 移 動 モ ー ション を 提 案 す る;
1. 生 物 の 蛇 が 円 柱 形 状 の 物 体 の 上 を 移 動 す る 方 法 を 参 考 に し ,離 散 的 に 配 管 を 把 持 し て 体 を 支 持 し ,把 持 す る 地 点 を 順 次 送 る 動 作 を 実 現 す る 螺 旋 尺 取 り 方 式 の モ ー ション ,
2. 配 管 外 周 に あ る 分 岐 点 を 乗 り 越 え る た め に ,ヘ ビ 型 ロ ボット が 配 管 に 螺 旋 状 に 巻 き 付 い た 状 態 で 体 幹 の 一 部 を 配 管 か ら 浮 か せ る 縦 波 を 作 り,こ の 縦 波 を 後 方 の 関 節 か ら 前 方 の 関 節 へ シ フ ト 制 御 に よ り 伝 達 す る 螺 旋 縦 波 方 式 の モ ー ション .
ヘ ビ 型 ロ ボット の 運 動 計 画 に お い て は ,先 行 研 究 で 提 案 さ れ て い る ヘ ビ 型 ロ ボッ ト の 体 幹 形 状 を 曲 率 と 捩 率 を 用 い て 連 続 曲 線 モ デ ル と し て 表 現 す る 手 法 を 採 用 す る .連 続 曲 線 で 表 現 さ れ た 体 幹 形 状 を 離 散 化 す る こ と で ,ヘ ビ 型 ロ ボット の 各 関 節
の 目 標 角 度 を 与 え る .こ の 際 ,ロ ー ル 軸 ま わ り の 座 標 系 の 回 転 を 与 え る こ と で ,ヘ ビ 型 ロ ボット に 捻 転 運 動 を さ せ る こ と が で き る .捻 転 運 動 は ヘ ビ 型 ロ ボット を 体 幹 の 法 線 方 向 に 移 動 さ せ る モ ー ション と な る .ま た ,ヘ ビ 型 ロ ボット の 運 動 生 成 を 行 う 際 に ,角 度 指 令 を 前 方 の 関 節 ユ ニット か ら 後 方 の 関 節 ユ ニット へ バ ケ ツ リ レ ー 式 に 伝 達 す る「 シ フ ト 制 御 」を 導 入 す る .シ フ ト 制 御 を 用 い る こ と で ,計 画 し た 形 状 の 接 線 方 向 に 沿って ヘ ビ 型 ロ ボット の 形 状 を 変 化 さ せ る こ と が で き る .
さ ら に ,本 研 究 で 新 た な 提 案 し た 二 つ の 移 動 モ ー ション の 検 証 実 験 の 結 果 に つ い て 示 す.螺 旋 尺 取 り 方 式 運 動 に つ い て は ,段 差 の あ る 障 害 物 を 乗 り 越 え る 実 験 を 行った .螺 旋 縦 波 方 式 運 動 に つ い て は 分 岐 点 を す り 抜 け る 実 験 を 行った .提 案 手 法 を 実 機 に 実 装 す る に あ たって は ,関 節 の 可 動 範 囲 や ア ク チュエ ー タ の 出 力 を 考 慮 し た パ ラ メ ー タ 設 定 が 必 要 と な る .ま た ,実 機 実 験 に お い て は ,単 に ロ ボット の 形 状 の 設 計 を す る だ け で は な く,重 力 の 影 響 な ど を 考 慮 し た 実 装 が 必 要 と な る .こ れ ら の 実 験 に お い て 必 要 と な る 設 計 に つ い て も 述 べ る .実 験 に よ り,提 案 し た 二 つ の 移 動 モ ー ション の 有 用 性 を 確 認 で き た .
ii
目 次
1 緒 言 1
1.1 先 行 研 究 . . . . 1
1.1.1 ヘ ビ 型 ロ ボット の 運 動 学 . . . . 3
1.1.2 ヘ ビ 型 ロ ボット の 形 状 制 御 . . . . 5
1.1.3 配 管 内 や 外 周 を 移 動 す る ヘ ビ 型 ロ ボット. . . . 6
1.2 本 研 究 の 目 的 と 位 置 づ け. . . . 7
1.3 本 論 文 の 構 成 . . . . 9
2 連 続 曲 線 モ デ ル か ら 目 標 関 節 角 度 の 導 出 11 2.1 Frenet-Serretの 公 式 に よ る ヘ ビ 型 ロ ボット の 連 続 曲 線 モ デ ル. . . . 11
2.2 背 び れ 曲 線 に よ る 表 現 . . . . 12
2.3 目 標 関 節 角 度 の 導 出. . . . 15
3 先 行 研 究 で 実 現 し た 移 動 形 態 16 3.1 開 発 し た ヘ ビ 型 ロ ボット . . . . 16
3.1.1 jyanome 2号 機 . . . . 16
3.1.2 ノ ー マ ルV2タ イ プ ヘ ビ 型 ロ ボット. . . . 17
3.1.3 ハ イ パ ワ ー タ イ プ ヘ ビ 型 ロ ボット . . . . 20
3.2 先 行 研 究 で 実 現 し た 移 動 形 態 . . . . 22
3.2.1 横 う ね り 推 進 . . . . 22
3.2.2 Sinus-lifting推 進 . . . . 24
3.2.3 Pedal wave推 進 . . . . 25
3.2.4 Sidewinding推 進 . . . . 26
3.2.5 Lateral rolling . . . . 29
3.2.6 螺 旋 捻 転 運 動 . . . . 29
iii
3.3 ま と め . . . . 31
4 螺 旋 尺 取 り 方 式 運 動 と 螺 旋 縦 波 方 式 運 動 の 設 計 34 4.1 螺 旋 尺 取 り 方 式 の 提 案 . . . . 34
4.1.1 各 パ ラ メ ー タ の 設 定 指 針 . . . . 37
4.1.2 曲 率κと 捩 率τ の 計 算 . . . . 39
4.1.3 シ フ ト 制 御 に よ り 螺 旋 尺 取 り 方 式 の 形 状 生 成 . . . . 40
4.2 螺 旋 縦 波 方 式 運 動 . . . . 43
4.2.1 螺 旋 縦 波 曲 線 の 設 計 . . . . 43
4.2.2 各 パ ラ メ ー タ の 設 定 指 針 . . . . 45
4.2.3 曲 率κと 捩 率τ の 計 算 . . . . 47
4.2.4 捻 転 補 正 値 . . . . 49
4.2.5 重 力 落 下 補 正 . . . . 51
4.2.6 シ フ ト 制 御 に よ り 螺 旋 縦 波 方 式 の 形 状 生 成. . . . 52
5 実 験 54 5.1 螺 旋 尺 取 り 方 式 運 動. . . . 54
5.1.1 螺 旋 尺 取 り 方 式 運 動 の シ ミュレ ー ション 実 験 . . . . 54
5.1.2 螺 旋 尺 取 り 方 式 運 動 の 実 機 実 験 . . . . 58
5.2 螺 旋 縦 波 方 式 運 動 . . . . 63
5.2.1 螺 旋 縦 波 方 式 運 動 の シ ミュレ ー ション 実 験. . . . 63
5.2.2 螺 旋 縦 波 方 式 の 実 機 実 験 . . . . 65
5.3 ま と め . . . . 70
6 結 言 71
参 考 文 献 73
謝 辞 80
論 文 リ ス ト 81
iv
付 録A 曲 率 と 捩 率 の 計 算 84
A.1 螺 旋 尺 取 り 方 式 の 曲 率κ(s)と 捩 率τ(s) . . . . 84 A.2 螺 旋 縦 波 方 式 の 曲 率κ(s)と 捩 率τ(s) . . . . 86 付 録B ROS (Robot Operating System) に よ る シ ス テ ム 構 築 88 B.1 シ ス テ ム を 構 成 す るROSノ ー ド 群 . . . . 88 B.2 シ ミュレ ー ション 環 境 に お け る ロ ボット モ デ ル . . . . 89
付 録C 検 証 実 験 92
v
図 目 次
1.1 Snakes move in different ways, depending on their species. The shading indicates points where the snake’s ventral scales push against the ground[61].
. . . . 2 1.2 The wheel or crawler-type robot has a simple structure and has a high moving
efficiency on a flat surface, low adaptability in case of a heavy rough surface.
In contrast, snake robots have the possibility of moving in various environments using them cord-like body. . . . . 2 1.3 Serpenoid curve(left) and distribution of normal force(right). . . . . 3 1.4 One of Hirose’s early Active Cord Mechanisms(ACM-III), which was the world’s
first snake robot(left). The snake robot ACM-R3 developed at Tokyo Institute of Technology. The snake robot is covered with passive wheels(right). . . . . 4 1.5 The snake robot Sam developed at Carnegie Mellon University. The robot has a
strong and compact joint mechanism and can climb trees(left). The snake robot Kulko developed at the Norwegian University of Science and Technology. Each joint module is covered by force sensors in order to measure contact force the environment(right). . . . . 5 1.6 Theory of s-shift control for helical rolling motion. . . . . 6 1.7 Illustration ofν-shift control method and bend spiral curve that consideredθof f set
and βof f set. . . . . 7 1.8 The snake robot J yanome2 developed at Okayama University. The robot can
climb pipes with helical form. . . . . 8 1.9 The snake robot Samdeveloped at Carnegie Mellon University. The robot has a
strong and compact joint mechanism and can climb trees. . . . . 8 1.10 Expected application of snake robot . . . . 10
vi
2.1 Coordinate system of Frenet-Serret . . . . 12
2.2 Illustration of backbone curve . . . . 13
2.3 Definition of ψ(s) . . . . 14
3.1 Overview of the jyanome2 snake robot showing its kinematic configuration. . . . 17
3.2 Outline of the jyanome2 snake robot’s control system. . . . . 18
3.3 Overview of the normal V2 snake robot showing its kinematic configuration. The solid green line is the pitch joint, and the dashed red line is the yaw joint. . . . . 18
3.4 System configuration of normal V2 snake robot. . . . . 19
3.5 System configuration of normal V2 snake robot. . . . . 19
3.6 Hight-Power type snake robot . . . . 21
3.7 System diagram of the hight power snake robot platform. . . . 22
3.8 Serpenoid curve . . . . 23
3.9 Serpentine locomotion . . . . 24
3.10 Sinus lifting motion of a snake. . . . . 25
3.11 Sinus-lifting . . . . 25
3.12 Target angles of sinus-lifting motion . . . . 26
3.13 Pedal wave motion . . . . 27
3.14 Target angles of pedal wave motion . . . . 27
3.15 Sidewinding . . . . 28
3.16 Sidewinding . . . . 28
3.17 Target angles of sidewinding . . . . 29
3.18 lateral rolling . . . . 30
3.19 Lateral rolling target angle . . . . 30
3.20 helical shapeg . . . . 31
3.21 helical rolling . . . . 32
3.22 Target angles of helical rolling. . . . 33
vii 4.1 The effects of perch incline on locomotor mode and movement. The tracings are
from dorsal view videos of a corn snake ( SVL =102 cm, mass=400 g, 4.1 cm perch) and show seven consecutive images at equal time intervals within a single cycle of concertina locomotion (A,B). The downhill sequence (C) is for the same total time as A. The shaded areas indicate static contact with the perch. (A) Uphill 90° . (B) Horizontal. (C) Downhill 90° . The times between successive
images of B and C are 0.53 s, and 0.7 s for A. . . . . 35
4.2 A shape of spiral inchworm in the case of a = 0.2, b = 0.02, c = 0.1, d = 3, ω = 0.2. . . . . 36
4.3 Parameter settings of inchworm gait. . . . . 38
4.4 Curvature κ and torsion τ of inchworm curve. . . . . 39
4.5 The relationship between s and t around protrusion of helical wave curve (a = 0.09, b= 0.02, ω= 0.3,c= 0.04,d= 3). . . . . 40
4.6 Illustration of shift algorithm. . . . . 42
4.7 Illustration of helical rolling motion: s = l is the head of the snake robot, and s = 0 is the tail of the snake robot; B is the binormal direction, and T is the direction tangential to the snake robot’s body. (a) State of a snake robot climbing a pipe through helical rolling motion. (b) The state is projected in the z-rθ plane; on this plane, the shape of the snake robot is a line. (right)Helical wave propagation on z-rθplane. . . . . 43
4.8 Hyperbolic function sech . . . . 44
4.9 An example of a helical wave curve . . . . 45
4.10 The effects of perch incline on locomotor mode and movement. . . . . 46
4.11 The Curvatureκ and torsionτ around the protrusion of the helical wave curve . 47 4.12 An example of value range of A andω (r= 0.092, n= 0.029, ϕ= 2π). . . . . 47
4.13 The relationship betweensandtaround protrusion of helical wave curve (r= 0.1, n= 0.02,A= 0.1,ω = 1,ϕ= 2π). . . . . 49
4.14 Helical wave curve and snake robot shape: (a) planned curve; (b) application to a snake robot at ∆t. . . . . 50
viii 4.15 (a) Explanation of phenomenon of robot dropping. The green part denotes the
snake robot’s trunk attached to the pipe. The yellow part is the part that begins to form a helical wave curve. The yellow arrow shows the direction of gravity.
(b) Gravity compensation in the part of helical wave propagation. The red arrow
shows the direction of twisting by ψg. . . . . 51
4.16 Illustration of shift algorithm. . . . . 53
4.17 Programming flowchart. . . . . 53
5.1 Simulation results of movement distance along cylinder with three patterns of parameters. . . . . 55
5.2 An example of simulation result with the parameters of pattern B (a= 0.090, b= 0.015, ω= 0.435, c= 0.038, d= 2.29). . . . . 56
5.3 An example of experimental result of moving on a pipe with the parameters of pattern B (a=0.090, b=0.015, c=0.435, d=2.29, e=0.038). . . . . 58
5.4 An example of experimental result of stepping over 0.05[m] obstacle on the cylin- der with helical rolling motion. . . . . 60
5.5 An example of experimental result of stepping over 0.03[m] obstacle on the cylin- der with spiral inchworm motion with the parameters of pattern B (a=0.090, b=0.015, c=0.435, d=2.29, e=0.038). . . . . 60
5.6 An example of experimental result of stepping over 0.05[m] obstacle on the cylin- der with spiral inchworm motion with parameters of a = 0.106, b = 0.027, c = 0.417, d= 2.4, e= 0.0287. . . . . 62
5.7 An example of a simulation sequence obtained using the helical wave propagation motion. The figures are separated by intervals of approximately 22[sec]. . . . . . 64
5.8 The transition of angles of head and tail joints. . . . . 64
5.9 The positions of the head and tail links on the z-axis in the experiment. . . . . 64
5.10 Experiments to determine parameter A. . . . . 66
5.11 Experimental results of parameter A. . . . . 66
5.12 Overview of the experimental pipe . . . . 68
ix 5.13 An example of actual machine experiment result of helical wave propagate motion.
In this figure, the snake robot goes through the branch point by using the helical
wave propagate motion. . . . . 68
5.14 Command angle and actual angle of head joint. The part surrounded by the broken line is the waiting time at which set the parameter A is revised from 0.02 to 0.03. . . . . 69
5.15 Partial enlargement from 94[sec] to 108[sec]. The part surrounded by the broken line is the joint angle at the time of generation of the helical wave curve. . . . . 69
B.1 ROS Nodes . . . . 89
B.2 jyanome2-Vrep-structure . . . . 90
B.3 normalV2-Vrep-structure . . . . 90
B.4 Overview of the experimental snake robot and its unit in Gazebo(NormalV2). 91 c.1 An example of experimental result of the influence of gravity . . . . 93
c.2 Experimental results of the influence of gravity . . . . 93
x
表 目 次
3.1 snake robot locomotions . . . . 33
1
第 1 章
緒言
1.1 先 行 研 究
ヘ ビ 型 ロ ボット は 多 関 節 を 直 列 に 連 結 し て 構 成 さ れ る 多 自 由 度 冗 長 ロ ボット で あ る .生 物 の 蛇 の 特 徴 を 摸 倣 し て 開 発 さ れ て い る た め ,細 長 い 体 幹 を 活 か し て 多 様 な 移 動 形 態 を 実 現 す る こ と が 可 能 で あ り,複 雑 な 環 境 下 で 移 動 す る こ と が で き る .
ヘ ビ 型 ロ ボット の 研 究 は 生 物 の 蛇 の 移 動 形 態 を 学 ぶ こ と か ら 始 まった .蛇 の 移 動 形 態 と し て はFig. 1.1に 示 す よ う に ,横 う ね り 推 進( 蛇 行 推 進, serpentine locomotion)、
サ イ ド ワ イ ン デ ン グ 推 進(sidewinding locomotion)、コ ン チェル ティー ナ 運 動(concertina locomotion)、直 線 運 動(rectilinear locomotion)な ど が あ る[2, 16, 17, 19, 20, 30, 32, 33, 51]. こ の 四 つ の 移 動 形 態 に つ い て 定 量 的 に 研 究 し た の はJ.Grayの 研 究 が 最 初 と さ れ て い る .横 う ね り 推 進 は 体 幹 をS字 状 に 左 右 に く ね ら せ て 進 む 移 動 方 式 で あ り,最 も 効 率 よ い 移 動 方 式 と 言 わ れ ,ほ ど ん ど の 種 類 の 蛇 で 観 察 さ れ て い る[16, 32].サ イ ド ワ イ ン デ ン グ 推 進 は 砂 漠 の 蛇 に 見 ら れ る 移 動 形 態 で あ り,軟 弱 な 環 境 を 移 動 す る 際 に 十 分 な 摩 擦 を 得 る こ と が で き る[6, 17, 56].コ ン チェル ティー ナ 運 動 は 壁 な ど に 囲 ま れ た 環 境 に 閉 じ 込 め ら れ た 場 合 に ,体 幹 の 一 部 を ア コ ー ディオ ン 状 に 屈 曲 さ せ る 移 動 形 態 で あ る .直 線 運 動 は 体 幹 を まっす く に 伸 ば し て 腹 面 を 波 状 に 運 動 さ せ て 進 む 移 動 形 態 で あ る[10].こ の よ う に ,生 物 の 蛇 は 環 境 に よって 様々な 形 態 を 示 し ,
「 足 」が な い の に 高 い 走 破 性 を 持 つ .生 物 の 蛇 の 示 す 多 様 な 機 能 を 模 倣 し た ロ ボッ ト を 開 発 す る こ と は 大 き な 利 点 が あ り,Fig. 1.2に 示 す よ う に ,一 般 的 な 車 輪 型 や ク ロ ー ラ 型 の 移 動 ロ ボット よ り 高 い 走 破 性 を 実 現 す る こ と が 可 能 で あ る と 考 え ら れ る .
本 章 で は ,ま ず,研 究 背 景 と し て 生 物 の 蛇 の 多 様 な 移 動 形 態 を 工 学 的 に 実 現 す る 際 に な さ れ た 様々な 研 究 を 概 観 す る .そ し て ,本 研 究 の 位 置 付 け に 関 し て 述 べ る . 最 後 に ,本 論 文 の 構 成 を 紹 介 す る .
第1章 緒 言 2
Fig. 1.1:Snakes move in different ways, depending on their species. The shading indicates points where the snake’s ventral scales push against the ground[61].
Fig. 1.2:The wheel or crawler-type robot has a simple structure and has a high moving efficiency on a flat surface, low adaptability in case of a heavy rough surface. In contrast, snake robots have the possibility of moving in various environments using them cord-like body.
第1章 緒 言 3 1.1.1 ヘ ビ 型 ロ ボット の 運 動 学
ヘ ビ 型 ロ ボット の 形 状 生 成 に お い て ,大 き く 分 け て 二 つ の 考 え 方 が あ る .一 般 的 な ヘ ビ 型 ロ ボット は リ ン ク と 回 転 関 節 で 構 成 さ れ る た め ,シ リ ア ル リ ン ク マ ニ ピュ レ ー タ の 運 動 学 を 利 用 し て 運 動 学 の 記 述 を す る こ と が で き る .そ し て ,ヘ ビ 型 ロ ボット の 運 動 学 的 冗 長 性 の 特 徴 を 利 用 す る こ と で ,軌 道 追 従 制 御 な ど の 様々な タ ス ク を 実 現 す る こ と が で き る .Matsunoら は 二 次 元 平 面 を 移 動 す る 車 輪 型 ヘ ビ 型 ロ ボット の 運 動 学 モ デ ル に 基 づ い て 制 御 系 を 構 築 し ,う ね り 運 動 に よ る 推 進 の 機 能 を 自 然 に 発 生 さ せ る メ カ ニ ズ ム を 提 案 し た[34, 35, 36].Liljeb¨ackら は 運 動 学 の 冗 長 性 を 利 用 し た 障 害 物 回 避 な ど を 実 現 し て い る[3, 4, 31].Satoら は ヘ ビ 型 ロ ボット に 対 し て ,動 力 学 モ デ ル に 基 づ い た 制 御 系 設 計 を 行 い ,ヘ ビ 先 頭 の 正 確 な 軌 道 追 従 を 実 現 す る 制 御 系 な ど を 提 案 し ,シ ミュレ ー ション 実 験 に よ り 提 案 す る 制 御 則 の 有 効 性 を 検 証 し た[45, 48, 50].し か し な が ら ,超 冗 長 ヘ ビ 型 ロ ボット の 運 動 学 の 記 述 が よ り 煩 雑 で あ り,計 算 コ ス ト は リ ン ク 数 を 増 加 す る と 計 算 量 が 増 加 す る .よって ,リ ン ク 数 を 増 や し て い く と 実 時 間 制 御 が 困 難 と な る 問 題 が あ る[8].ま た ,車 輪 型 ヘ ビ 型 ロ ボット の 場 合 は ,直 線 状 あ る い は 円 弧 状 の 形 状 が 特 異 姿 勢 に あ た り,こ れ ら の 特 異 姿 勢 を い か に 回 避 す る か が 一 つ の 重 要 な 問 題 と な る[34].
一 方 で ,「 有 限 個 の リ ン ク に よって 曲 線 を 近 似 す る 」と 言 う 幾 何 学 的 な 問 題 を 解 く 方 法 が あ る .Hiroseら は シ マ ヘ ビ の 平 面 上 を 蛇 行 推 進 す る 運 動 を 考 察 し ,そ の 形 状 を 表 す モ デ ル と し て 曲 率 が 正 弦 曲 線 的 に 変 化 す る「 サ ー ぺ ノ イ ド 曲 線(Serpenoid Curve)」を 提 案 し た(Fig. 1.3 left).サ ー ぺ ノ イ ド 曲 線 に 基 づ く 力 学 的 解 析 に よって 生
Fig. 1.3:Serpenoid curve(left) and distribution of normal force(right).
第1章 緒 言 4 物 の 蛇 は 体 幹 に 対 す る 接 線 方 向 と 法 線 方 向 と の 摩 擦 差 に よ り 推 進 し て い る こ と を 見 出 し(Fig. 1.3 right),1972年 に 受 動 車 輪 を 備 え た ヘ ビ 型 ロ ボット が 開 発 さ れ ,2次 元 平 面 上 の 滑 ら か な 横 う ね り 推 進 が 実 現 さ れ た(Fig. 1.4) [19, 20, 28, 38, 39].ま た ,ヘ ビ 型 ロ ボット の 運 動 学 に 関 す る 研 究 は2次 元 平 面 上 で の 動 き に 限 ら ず,動 作 空 間 を3 次 元 空 間 へ 拡 張 す る た め に 様々な 研 究 が な さ れ た .Chirikjianら が 曲 率 と 捩 率 の 代 わ り に 仰 角 と 方 位 角 に よって 定 式 化 さ れ る 曲 線 を 用 い たbackbone curve reference setを 超 冗 長 ロ ボット の モ デ ル と し て 導 入 し た[7].そ の 後 ,ヘ ビ 型 ロ ボット の 体 幹 を 連 続 的 な 曲 線 モ デ ル 形 状 で 表 す 手 法 を 採 用 す る 様々な 研 究 が な さ れ た .Moriら は ヘ ビ 型 ロ ボット の 体 幹 姿 勢 を 持 つ 連 続 曲 線 モ デ ル と 考 え ,空 間 の 螺 旋 曲 線 に 沿って ロ ボッ ト の 形 状 を 生 成 す る3次 元 的 な 操 舵 制 御 を 提 案 し た .そ し て ,3次 元 運 動 が 可 能 な ヘ ビ 型 ロ ボットACM-R3(Fig. 1.4)を 開 発 し ,横 う ね り 推 進 、sinus-lifting、sidewinding、 loop wheeling motionな ど の 移 動 形 態 を 実 現 し た[37, 38].連 続 曲 線 モ デ ル を 実 機 に 導 入 す る 際 に 離 散 モ デ ル に す る 必 要 が あ る た め ,Yamadaら は 連 続 曲 線 モ デ ル か ら 離 散 モ デ ル へ の 近 似 手 法 を 提 案 し ,実 機 実 験 に よ り 提 案 手 法 の 有 効 性 を 検 証 し た [38, 47, 53].Dateら は 三 次 元 モ デ ル で の 連 続 体 の 運 動 学 を 導 出 し ,連 続 体 で 得 ら れ た 運 動 を 逆 運 動 学 に よって 多 リ ン ク 系 に 近 似 す る 方 法 を 提 案 し た[8, 9, 53].本 研 究 で は ,ヘ ビ 型 ロ ボット の 形 状 を 生 成 す る 際 に はMoriとYamadaら の 提 案 す る 連 続 曲 線 モ デ ル の 考 え 方 を 採 用 す る .
Fig. 1.4:One of Hirose’s early Active Cord Mechanisms(ACM-III), which was the world’s first snake robot(left). The snake robot ACM-R3 developed at Tokyo Institute of Technology. The snake robot is covered with passive wheels(right).
第1章 緒 言 5
Fig. 1.5:The snake robot Sam developed at Carnegie Mellon University. The robot has a strong and compact joint mechanism and can climb trees(left). The snake robot Kulko developed at the Norwegian University of Science and Technology. Each joint module is covered by force sensors in order to measure contact force the environment(right).
1.1.2 ヘ ビ 型 ロ ボット の 形 状 制 御
ヘ ビ 型 ロ ボット の 形 状 制 御 を 行 う 際 に ,単 位 時 間 毎 に 各 関 節 の 指 令 角 度 を 一 度 に 計 算 し ,指 令 角 度 に な る よ う に 各 関 節 を 駆 動 さ せ る こ と で 実 現 で き る .し か し な が ら ,こ の よ う な 運 動 制 御 方 式 で は 滑 走 方 向 の 自 由 な 操 舵 や 移 動 形 態 間 の ス ム ー ズ な 形 状 変 化 ,移 動 環 境 に 適 応 し た 移 動 な ど を 実 現 す る こ と は 困 難 で あ る .
一 方 で ,ロ ボット の 移 動 経 路 を あ ら か じ め 計 画 し ,そ の 移 動 経 路 に ヘ ビ 型 ロ ボッ ト の 各 関 節 を 沿 わ す よ う な 制 御 方 法 が あ る .Hiroseら は 角 度 指 令 を 前 方 の 関 節 ユ ニット か ら 後 方 の 関 節 ユ ニット へ バ ケ ツ リ レ ー 式 に 伝 達 す る「 シ フ ト 制 御 」に よ り,
滑 ら か な 蛇 行 推 進 と 操 舵 を 実 現 し た[19].Moriら は シ フ ト 制 御 法 を3次 元 に 拡 張 し てACM-R3(Fig. 1.4)に 実 装 し た[38, 53, 54, 55, 57].Kamegawaら は ヘ ビ 型 ロ ボット の シ フ ト 制 御 を「s-シ フ ト 制 御 」と「v-シ フ ト 制 御 」と 分 類 し て 議 論 し て い る .s-シ フ ト 制 御 は 前 述 の シ フ ト 制 御 と 同 様 で あ る(Fig. 1.6).そ れ に 対 し て ,あ ら か じ め 計 画 し て い た 移 動 経 路 か ら 捻 転 運 動 に よって 脱 線 し ,新 た な 移 動 経 路 に ヘ ビ 型 ロ ボット が シ フ ト す る と 同 時 に 体 軸 方 向 に∆s移 動 し た と 考 え る こ と で 先 頭 か ら 形 状 を 形 成 す る 制 御 方 法 を 示 す.こ の よ う な 制 御 方 法 を 捻 転 運 動 に よって 体 軸 に 対 し て 垂 直 方 向 に 移 動 す る と い う こ と か ら「v-シ フ ト 制 御 」と 呼 ぶ こ と と し て い る(Fig. 1.7).
Kamegawaら は 螺 旋 捻 転 運 動 お よ び 曲 螺 旋 捻 転 運 動 をv-シ フ ト 制 御 に よ り 実 現 し た
第1章 緒 言 6
Fig. 1.6:Theory of s-shift control for helical rolling motion.
[25].本 研 究 で は「s-シ フ ト 制 御 」を 用 い る .
シ フ ト 制 御 を 用 い る こ と で ,計 画 し た 曲 線 に 沿って ヘ ビ 型 ロ ボット の 形 状 を 変 化 さ せ る こ と が で き る .シ フ ト 制 御 は ,ロ ボット が 連 続 曲 線 に 近 い 形 状 を 取 り う る 場 合 は 特 に 有 効 で あ り,計 算 量 を 比 較 的 小 さ く で き る 利 点 が あ る .た だ し ,シ フ ト 制 御 法 で は 所 定 の 目 的 を 達 成 す る た め の 運 動 を 予 め 決 定 し な け れ ば な ら な い た め , 運 動 生 成 法 に 関 す る 詳 し い 検 討 が 必 要 で あ る .
1.1.3 配 管 内 や 外 周 を 移 動 す る ヘ ビ 型 ロ ボット
Kamegawaら はFrenet-Serretの 公 式 に 基 づ い て ,ヘ ビ 型 ロ ボット を 連 続 曲 線 モ デ ル か ら 離 散 折 れ 線 モ デ ル へ 適 用 す る 手 法 を 用 い て 螺 旋 捻 転 運 動(Fig. 1.8)と 呼 ば れ る 運 動 を 生 成 し ,円 柱 の 内 部 や 外 部 と いった3次 元 の 環 境 を 移 動 す る こ と が 実 現 し て い る[9, 24, 25, 26] Rollinsonら は 連 続 曲 線 モ デ ル の 考 え 方 に よ り ヘ ビ 型 ロ ボット の 螺 旋 曲 線 形 状 を 生 成 し ,そ の 形 状 を 基 に し て 拡 張 カ ル マ ン フィル タ を 用 い る こ と で 個々の 関 節 角 度 誤 差 か ら 全 体 の 形 状 を 決 定 し ,コ ン プ ラ イ ア ン ス 制 御 や バ ー チャ ル シャシ ー な ど の 機 能 を ヘ ビ 型 ロ ボット(Fig. 1.9)に 持 た せ る こ と に 成 功 し て い る [11, 12, 13, 14, 15, 52].螺 旋 捻 転 運 動 を 用 い る こ と で 配 管 の 内 部 や 外 部 と いった3次 元 の 環 境 を 移 動 す る こ と が で き る .配 管 外 周 の 場 合 ,ロ ボット が 配 管 に 巻 き 付 い た 状
第1章 緒 言 7
Fig. 1.7:Illustration ofν-shift control method and bend spiral curve that consideredθof f set and βof f set.
態 で 捻 転 運 動 を す る こ と に よ り 移 動 ,配 管 内 の 場 合 配 管 の 内 壁 に 突っ張 り 力 を 与 え ,そ の 反 力 を 得 る こ と で 滑 ら な い よ う に 移 動 す る こ と が で き る .
ヘ ビ 型 ロ ボット の 研 究 は 平 坦 な 床 面 や 瓦 礫 な ど の 不 整 地 な ど 限 定 さ れ て い た が , 螺 旋 捻 転 運 動 に よって 配 管 な ど の 円 柱 体 に も 適 応 で き る よ う に なった .ヘ ビ 型 ロ ボッ ト を 連 続 曲 線 モ デ ル と 考 え る こ と で よ り 本 質 的 な 解 析 が 行 え る 点 や 簡 略 化 さ れ た モ デ ル を 得 る こ と で 計 算 量 を 抑 え ら れ る 点 な ど の 有 意 点 が 考 え ら れ る .デ メ リット と し て ,こ の 移 動 手 法 は ロ ボット を 円 柱 に 巻 き 付 か せ た 状 態 で の 大 ま か な 移 動 に 適 し て い る が ,ロ ボット の 正 確 な 位 置 決 め は 難 し い .ま た ,ヒュー リ ス ティック な 制 御 手 法 で あ る た め ,運 動 学 的 冗 長 性 を 利 用 す る こ と は で き な い な ど が あ げ ら れ る .
一 方 で ,Tanakaら は ヘ ビ 型 ロ ボット を 多 リ ン ク 系 と し て モ デ ル 化 し ,円 柱 曲 面 上 に お け る 軌 道 追 従 制 御 則 を 提 案 し た が[49],ロ ボット が 滑 り 落 ち な い よ う な 十 分 な 摩 擦 力 が 得 ら れ る こ と が 前 提 と なって い る た め ,シ ミュレ ー ション 上 は 実 現 し て い る が 実 機 で 実 現 す る の が 困 難 で あ る .
1.2 本 研 究 の 目 的 と 位 置 づ け
本 研 究 で は ,ヘ ビ 型 ロ ボット を 用 い て プ ラ ン ト 配 管 の 外 周 に 巻 き 付 い て 移 動 し , 掃 除 や 点 検 な ど の 作 業 を 行 う こ と を 想 定 す る .ロ ボット の 実 用 化 を 考 え た 場 合 ,以
第1章 緒 言 8
Fig. 1.8:The snake robot J yanome2 developed at Okayama University. The robot can climb pipes with helical form.
Fig. 1.9:The snake robotSamdeveloped at Carnegie Mellon University. The robot has a strong and compact joint mechanism and can climb pipes.
第1章 緒 言 9 下 の 要 件 が 求 め ら れ る と 著 者 ら が 考 え る;
・ 移 動 形 態:ロ ボット に は 配 管 の フ ラ ン ジ や 分 岐 点(T字 分 岐 点 な ど) と いった 障 害 物 を す り 抜 け る こ と が で き る 移 動 モ ー ション が 必 要
・ 配 管 を 把 持 し て い る 部 分 で 十 分 な 摩 擦 力 を 発 生 さ せ る た め の ハ ー ド ウェア 設 計 が 必 要
・ ロ ボット の 移 動 中 に 周 囲 の 環 境 と の 接 触 が 複 雑 な の で ,接 触 を 提 示 で き る シ ス テ ム が 必 要
・ 防 塵 防 水 ,無 線 遠 隔 操 縦 な ど を 考 慮 し た ハ ー ド ウェア 設 計 が 必 要
・ 技 術 を 共 有 で き る 仕 組 み が 必 要
そ こ で ,本 論 文 で は ヘ ビ 型 ロ ボット が 配 管 の 外 周 に 沿って 移 動 す る モ ー ション の 設 計 を 研 究 対 象 と す る .特 に ,配 管 の 外 周 に フ ラ ン ジ や 分 岐 点 な ど の 障 害 物 が あっ た 場 合 に ヘ ビ 型 ロ ボット が 障 害 物 を す り 抜 け る 振 る 舞 い を 提 案 し ,新 た な 移 動 モ ー ション の 設 計 な ら び に 実 験 を 行 う.ま た ,配 管 と の 摩 擦 力 を 増 加 す る た め に ,ロ ボッ ト の 外 周 に 特 注 の ス ポ ン ジ ゴ ム を 付 け る な ど の ハ ー ド ウェア の 設 計 を し た .さ ら に ,提 案 手 法 は ピッチ と ヨ ー の 関 節 を 交 互 に 連 結 し て 構 築 さ れ て い る 一 般 的 な ヘ ビ 型 ロ ボット に 対 応 で き る た め ,ROSに 基 づ い た ソ フ ト ウェア シ ス テ ム を 構 築 し た . 我々の 研 究 グ ル ー プ は2015年 か ら 革 新 的 研 究 開 発 推 進 プ ロ グ ラ ム(Impulsing Paradigm Change through Disruptive Technologies Program, ImPACT)に 参 加 し ,ヘ ビ 型 ロ ボット の 実 用 化 に 注 目 し て ,現 在 ま で4種 類 の ヘ ビ 型 ロ ボット を 開 発 し て い る .ハ イ パ ワ ー タ イ プ ヘ ビ 型 ロ ボット,ノ ー マ ル タ イ プ ヘ ビ 型 ロ ボット,ノ ー マ ルV2タ イ プ ヘ ビ 型 ロ ボット と 防 塵 防 水 無 線 タ イ プ ヘ ビ 型 ロ ボット が あ る .本 研 究 で は ,主 に ノ ー マ ル V2タ イ プ ヘ ビ 型 ロ ボット を 用 い て 実 機 実 験 を 行った .
1.3 本 論 文 の 構 成
本 論 文 は ,本 章 を 含 め て6章 に よ り 構 成 さ れ る .第1章 で は ,序 論 と し て ヘ ビ 型 ロ ボット の 研 究 に お い て 注 目 し て い る と こ ろ を 紹 介 し ,特 徴 ,メ リット と 実 用 化 に 向 かって の 問 題 点 を 述 べ て い る .そ し て ,本 研 究 の 位 置 付 け に つ い て 述 べ て い る .第
第1章 緒 言 10
Fig. 1.10:Expected application of snake robot
2章 で は ,3次 元 空 間 内 に お け る ヘ ビ 型 ロ ボット の 連 続 的 な モ デ ル を 決 定 す る 手 法 に つ い て 示 し ,そ の 連 続 的 な モ デ ル に 沿った 形 状 を 実 機 で 実 現 す る 方 法 を 示 す.第 3章 で は ,本 研 究 グ ル ー プ で 開 発 し て い る ヘ ビ 型 ロ ボット を 紹 介 し た 後 先 行 研 究 で 実 現 し て る 移 動 形 態 の 推 進 原 理 に つ い て 述 べ る .そ し て ,ヘ ビ 型 ロ ボット の 移 動 形 態 を 再 現 す る .第4章 で は ,本 研 究 で 新 た に 提 案 す る 二 つ の 移 動 形 態:螺 旋 尺 取 り 方 式 運 動 と 螺 旋 縦 波 運 動 を 紹 介 す る .第5章 で は 螺 旋 尺 取 り 方 式 運 動 と 螺 旋 縦 波 運 動 に よ リ 円 柱 を 移 動 す る 実 験 を 示 す.ま た ,障 害 物 を 乗 り 越 え る 実 験 に つ い て 述 べ る .第6章 で は ,本 論 文 を 総 括 す る .
11
第 2 章
連続曲線モデルから目標関節角度の 導出
本 研 究 で は ,運 動 計 画 を す る 際 に ,ヘ ビ 型 ロ ボット の 体 幹 を 連 続 曲 線 モ デ ル と し て 表 現 す る 方 法 を 採 用 す る[9, 38, 53, 60].す な わ ち ,三 次 元 空 間 に お い て ヘ ビ 型 ロ ボット を ま ず Frenet-Serretの 公 式 を 用 い て 連 続 曲 線 で 表 現 し ,そ れ を 離 散 折 れ 線 モ デ ル へ 適 用 す る .本 章 で は そ の 方 法 を 述 べ る .
2.1 Frenet-Serret の 公 式 に よ る ヘ ビ 型 ロ ボット の 連 続 曲 線 モ デ ル
理 想 的 な ヘ ビ 型 ロ ボット を 無 限 の 関 節 を 微 小 間 隔 で 連 結 し た 太 さ の な い 線 と み な す と ,そ の 体 幹 形 状 は 空 間 曲 線 に な る .こ れ を 連 続 曲 線 モ デ ル と 呼 ぶ こ と に す る . Fig. 2.1に 示 す よ う に ,あ る 空 間 曲 線 をcと お く と 空 間 曲 線c の 形 状 は ,曲 線 の 始 点 か ら 測った 曲 線 の 長 さ(弧 長) sに 関 す る 連 続 微 分 方 程 式 と し て ,Frenet-Serretの 公 式 に よ り 曲 率 κ(s)と 捩 率τ(s) に よって 以 下 の よ う に 与 え ら れ る[59].
dc(s)/ds = e1(s) de1(s)/ds = κ(s)e2(s)
de2(s)/ds = −κ(s)e1(s) +τ(s)e3(s) de3(s)/ds = −τ(s)e2(s)
(2.1)
こ こ でc(s) = [(x(s),y(s),z(s)]T は 曲 線 の 座 標 を 示 す ベ ク ト ル で あ り,曲 線 の 座 標 は 弧 長sの 関 数 で あ る .e1(s),e2(s),e3(s) は そ れ ぞ れ 正 規 直 交 基 底 を な す 単 位 ベ ク ト ル で ,e1(s)は 曲 線 の 接 線 方 向 ,e2(s)は 曲 線 が 曲 が る 方 向 ,e3(s)はe3 =e1×e2 で 与 え ら れ る 単 位 方 向 の ベ ク ト ル と し て 定 義 さ れ る .式(2.1)は ,τ(s)dse1(s) +κ(s)dse3(s) と い う 回 転 ベ ク ト ル で 回 転 し な が らe1方 向 にdsず つ 移 動 す る 座 標 系e1,e2,e3 の 原 点 が 描 く 軌 跡 が 曲 線cに な る こ と を 示 し て い る .
第2章 連 続 曲 線 モ デ ル か ら 目 標 関 節 角 度 の 導 出 12
Fig. 2.1:Coordinate system of Frenet-Serret
2.2 背 び れ 曲 線 に よ る 表 現
式(2.1)で 与 え ら れ るFrenet-Serretの 公 式 で は 太 さ の な い 空 間 曲 線 モ デ ル で あ り,実 際 の ヘ ビ 型 ロ ボット に 存 在 す る 背 と 腹 の 向 き を 考 慮 す る こ と が で き な い .そ こ で , 文 献[8, 9, 24, 53, 54]に お い て 背 び れ 曲 線 と 呼 ば れ る 表 現 が 提 案 さ れ て い る .背 び れ 曲 線 で はFig. 2.2に 示 す よ う な 背 び れ 座 標 系(機 体 座 標 系) er,ep,ey を 連 続 曲 線 と み な し た ヘ ビ 型 ロ ボット に 張 り 付 け る .er は 曲 線 の 接 線 方 向 の 単 位 ベ ク ト ル ,ep, ey は そ れ ぞ れ ピッチ 軸 方 向 と ヨ ー 軸 方 向 の 単 位 ベ ク ト ル で あ る .こ れ ら 機 体 座 標 系 の 基 底 ベ ク ト ル と 定 義 に よ り,空 間 曲 線 cは 次 の よ う に 表 す こ と が で き る .
dc(s)/ds = er(s)
der(s)/ds = κy(s)ep(s)−κp(s)ey(s) dep(s)/ds = −κy(s)er(s) +τr(s)ey(s) dey(s)/ds = κp(s)er(s)−τr(s)ep(s)
(2.2)
こ こ で ,κp(s),κy(s),τr(s)は そ れ ぞ れ ピッチ 軸 回 り の 曲 率 ,ヨ ー 軸 回 り の 曲 率 ,ロ ー ル 軸 回 り の 捩 率 で あ る .式(2.2)がFrenet-Serret の 式(2.1)と 異 な る 点 は ,機 体 座 標 系 er,ep,eyの 回 転 がτ(s)dser(s) +κp(s)dsep(s) +κy(s)dsey(s) と い う 3 軸 の 成 分 を 持 つ 回 転 ベ ク ト ル で 与 え ら れ る 点 で あ る .本 研 究 で 使 用 す る ヘ ビ 型 ロ ボット は ピッチ 軸 ,ヨ ー 軸 の 二 つ の 関 節 の み で ロ ー ル 軸 は 存 在 し な い の で τr(s) = 0 と な る .
第2章 連 続 曲 線 モ デ ル か ら 目 標 関 節 角 度 の 導 出 13
Fig. 2.2:Illustration of backbone curve
dc(s)/ds = er(s)
der(s)/ds = κy(s)ep(s)−κp(s)ey(s) dep(s)/ds = −κy(s)er(s)
dey(s)/ds = κp(s)er(s)
(2.3)
Fig. 2.3に 示 す よ う に ,e2(s)とep(s)の 相 対 的 な 角 度 を 表 す 関 数 をψ(s)を 導 入 す る .
ep(s) =e2(s) cosψ(s)−e3(s) sinψ(s) ey(s) =e2(s) sinψ(s) +e3(s) cosψ(s)
(2.4)
ま た ,e1(s) =er(s)で あ る た め ,
κ(s)e2(s) =κy(s)ep(s)−κp(s)ey(s) (2.5)
式 (2.1),式 (2.2)に よ る と ,
κ(s)e1(s) +τ(s)e3(s) =κy(s)e1(s)
−τ(s)e2(s) =κp(s)er(s)
(2.6)
式(2.6)か らe2(s),e3(s)を 求 め て 式(2.4)に 代 入 す る と ,
第2章 連 続 曲 線 モ デ ル か ら 目 標 関 節 角 度 の 導 出 14
Fig. 2.3:Definition ofψ(s)
κ(s) =κy(s) cosψ(s)−κp(s) sinψ(s) 0 =κy(s) sinψ(s) +κp(s) cosψ(s)
(2.7)
ま た ,式(2.1),(2.3)と(2.4)か ら , d(e2(s)ep(s))
ds = de2(s)
ds ep(s) +e2(s)dep(s) ds
=−τsinψ(s) (2.8)
e2(s) ・ep(s) = cosψ(s)で あ る の で ,式(2.8)に 代 入 す る と , dcosψ(s)
ds = dψ(s)
ds sinψ(s) =−τsinψ(s)
dψ(s)
ds =τ(s) (2.9)
従って ,κp(s)とκy(s)をκ(s)とτ(s)で 表 す こ と が で き る よ う に なった た め ,Frenet-Serret の 公 式 で 与 え ら れ る 曲 線 と 背 び れ 曲 線 の 関 係 は 次 式 の よ う に な る .
κp(s) = −κ(s) sin (ψ(s)) κy(s) = κ(s) cos (ψ(s))
ψ(s) =
∫ s
0
τ(s)ds+ψ(0)
(2.10)
第2章 連 続 曲 線 モ デ ル か ら 目 標 関 節 角 度 の 導 出 15 こ こ で ,ψ(0) は ね じ れ の 初 期 値 を 意 味 す る 積 分 定 数 で あ り,既 知 ま た は 任 意 の 定 数 で あ る .従 来 の 螺 旋 捻 転 運 動 で は こ の 値 を 変 化 さ せ る こ と で 機 体 座 標 系 が 曲 線 に 沿って 回 転 す る の で ,ヘ ビ 型 ロ ボット は 捻 転 動 作 を 生 じ る .本 研 究 に お け る 実 験 で はψ(0) = 0と す る .式(2.10)に よ り,Frenet-Serretの 公 式 で3次 元 空 間 内 の 曲 線 が 与 え ら れ れ ば ,そ の 曲 線 を 機 体 座 標 系 で の 曲 率κp(s),κy(s) を 用 い て 表 す こ と が で き る .
曲 線 と 機 体 座 標 系 を 独 立 な も の と し て 扱 う 方 法 は ヘ ビ 型 ロ ボット の 屈 曲 を 直 接 に 表 し て い る た め ,ヘ ビ 型 ロ ボット の 形 状 を 扱 う 上 で 利 点 が 多 い .
2.3 目 標 関 節 角 度 の 導 出
連 続 曲 線 モ デ ル を 機 体 座 標 系 で の 曲 率κp(s),κy(s)を 用 い て 表 現 し た 後 に ,こ れ を 離 散 化 し て ヘ ビ 型 ロ ボット の 各 関 節 の な す べ き 相 対 角 度 を 導 出 す る .
ヘ ビ 型 ロ ボット の 各 リ ン ク の 長 さ をδsと す る と ,曲 率 の 定 義 よ り,位 置sで の リ ン ク 間 の 相 対 角 度 はκp(s)δsあ る い はκy(s)δsと な る .本 研 究 で 使 用 す る ヘ ビ 型 ロ ボッ ト は 先 頭 か ら 奇 数 番 目 にpitch,偶 数 番 目 にyawの 関 節 が な ら ぶ 構 造 に なって い る の で ,pitch関 節 とyaw関 節 の 間 の 距 離 をδs,関 節 番 号 をi= 1,2,·と す る と ヘ ビ 型 ロ ボッ ト の 各 関 節 の 目 標 角 度 は 次 の よ う に 与 え ら れ る .
θpd=κp(iδs)2δs (i= 1,3,5, ...) θdy =κy(iδs)2δs (i= 2,4,6, ...)
(2.11)
こ こ で ,θpdはpitch軸 関 節 の 目 標 角 度 ,θydはyaw軸 関 節 の 目 標 角 度 で あ る .
本 章 で は ,連 続 曲 線 モ デ ル で ヘ ビ 型 ロ ボット の 形 状 を 表 現 し ,そ れ を 離 散 化 し て 関 節 の 角 度 を 求 め る 方 法 を 述 べ た .本 研 究 グ ル ー プ で は ヘ ビ 型 ロ ボット の 形 状 設 計 に お い て よ く 使 用 さ れ る 手 法 で あ る .一 方 で ,ヘ ビ 型 ロ ボット の 運 動 学 を ロ ボット 工 学 で し ば し ば 使 用 さ れ るDH法 な ど を 用 い て 論 じ る こ と も 可 能 で あ る が ,多 関 節 で 構 成 さ れ る た め 通 常 の 方 法 で は 記 述 が 煩 雑 に な る .連 続 曲 線 モ デ ル の 考 え 方 を 用 い る こ と で ロ ボット の 形 状 を 抽 象 化 し て 考 え る こ と が で き ,複 雑 な 形 状 を 生 成 す る 場 合 ,特 に 有 効 で あ る .よ り 本 質 的 な 解 析 が 行 え る 点 や ,簡 略 化 さ れ た モ デ ル を 得 る こ と で 計 算 量 を 抑 え ら れ る 点 な ど の 優 位 性 が 考 え ら れ る .
16
第 3 章
先行研究で実現した移動形態
現 在 ま で(2018年 ),本 研 究 グ ル ー プ で は5タ イ プ の ヘ ビ 型 ロ ボット を 開 発 し て い る .本 論 文 で は 筆 者 が 開 発 に 参 加 し た3種 類 の ヘ ビ 型 ロ ボット を 紹 介 す る .各 ロ ボット に お い て ,ROS(Robot Operating System)に 基 づ い た シ ス テ ム を 構 築 し て い る . ま た ,動 力 学 シ ミュレ ー タV-repとGazebo上 に ロ ボット モ デ ル を 作 成 し て シ ミュレ ー ション 環 境 を 構 築 し て い る .ROSパッケ ー ジ や シ ミュレ ー ション 環 境 に 関 し て は 付 録 Bに 記 載 す る .
本 章 で は ヘ ビ 型 ロ ボット の 多 様 な 移 動 形 態 の 内 ,我々の 研 究 グ ル ー プ で 実 現 し て い る 移 動 形 態 の 形 状 モ デ ル と 移 動 形 態 の 推 進 原 理 を 説 明 す る .そ し て ,開 発 し た ヘ ビ 型 ロ ボット を 用 い て 移 動 形 態 を 再 現 す る .
3.1 開 発 し た ヘ ビ 型 ロ ボット
3.1.1 jyanome 2号 機
前 章1.1.1に 紹 介 し た よ う に ,ヘ ビ 型 ロ ボット の 横 う ね り 推 進 は 体 幹 に とって 摩 擦 力 の 異 方 性 に よ り 実 現 し て い る .生 物 の 蛇 の 皮 は そ の よ う な 特 性 を 持って い る[21]
た め ,蛇 行 推 進( 横 う ね り 推 進 )を 実 現 す る こ と が で き る が ,ロ ボット の 場 合 ,受 動 車 輪 を 取 り 付 け る こ と に よって 体 幹 に 沿った 接 線 方 向 と 法 線 方 向 の 摩 擦 の 差 を 生 じ さ せ ,前 進 す る こ と が で き る .jyanome 2号 機 は リ ン ク の 間 に 受 動 車 輪 を 取 り 付 け て い る ヘ ビ 型 ロ ボット で あ る[24].実 機 はFig. 3.1に 示 す よ う に ,pitchとyawの 二 自 由 度 の 駆 動 軸 を 持 つ 構 造 を1Unitと し ,こ れ を 直 列 に 連 結 し て ヘ ビ 型 ロ ボット を 構 築 し た .受 動 車 輪 を1Unitご と に 装 備 し て い る た め ,ロ ボット の 進 行 方 向 と そ れ に 垂 直 な 方 向 と の 間 に 摩 擦 差 が 生 じ る .横 う ね り 推 進 の 場 合 ,そ の 摩 擦 差 を 利 用 し て ,ロ ボット が 前 進 す る こ と が 可 能 で あ る .1Unitの サ イ ズ の 長 さ145[mm],幅50[mm],重 量 210[g],車 輪 間 の ト レッド は88[mm]で あ る .ヘ ビ 型 ロ ボット の 最 後 尾 に は ス リップ リ
第3章 先 行 研 究 で 実 現 し た 移 動 形 態 17
Fig. 3.1:Overview of the jyanome2 snake robot showing its kinematic configuration.
ン グ が 取 り 付 け ら れ て お り,ヘ ビ 型 ロ ボット が 捻 転 運 動 を 行 なって も コ ー ド が 捩 れ な い よ う に なって い る .関 節 駆 動 用 の ア ク チュエ ー タ と し て 市 販 の サ ー ボ モ ー タ ー (Dynamixel RX-28)を 使 用 し て い る .関 節 駆 動 用 サ ー ボ モ ー タ に は モ ー タ 制 御 用 の 基 盤 が 内 蔵 さ れ て お り,制 御 用PCか らRS485規 格 の 通 信 で 特 定 の コ マ ン ド をRX-28に 送 信 す る こ と で ,ヘ ビ 型 ロ ボット の 各 関 節 の 目 標 角 度 を 個 別 に 設 定 す る こ と が で き る .な お ,ヘ ビ 型 ロ ボット の ア ク チュエ ー タ へ は 外 部 の 安 定 化 電 源 か ら15[V]の 電 圧 が 供 給 さ れ て お り,最 大 で3.70[N·m]の ト ル ク を 発 生 で き る .
シ ス テ ム 構 成 をFig. 3.2に 示 す.ロ ボット 制 御 用PCに はOSと し てUbuntu14.04を イ ン ス ト ー ル し ,ROS indigoを 用 い て プ ロ グ ラ ム を 開 発 し て い る(付 録Bを 参 照).
3.1.2 ノ ー マ ルV2タ イ プ ヘ ビ 型 ロ ボット
ノ ー マ ルV2タ イ プ は 車 輪 非 搭 載 ヘ ビ 型 ロ ボット で あ る .外 観 をFig. 3.3に 示 し て い る .関 節 駆 動 用 の ア ク チュエ ー タ と し て 市 販 の サ ー ボ モ ー タ (Dynamixel XH-430R) を 使 用 し ,pitchとyawの 関 節 を 交 互 に 連 結 し て 構 築 さ れ て い る .サ ー ボ モ ー タ の 特 徴 は バック ケ ー ス 中 央 に あ る 溝 に は め ら れ た カ バ ー で ,コ ネ ク タ 部 を 保 護 す る こ と が で き ,ケ ー ブ ル の 引 き 出 し 方 向 を ガ イ ド す る 役 目 も あ る .
著 者 ら は ロ ボット の サ ー ボ モ ー タ 間 を 物 理 的 に 連 結 す る た め に パ ー ツ を 新 た に
第3章 先 行 研 究 で 実 現 し た 移 動 形 態 18
Fig. 3.2:Outline of the jyanome2 snake robot’s control system.
Fig. 3.3:Overview of the normal V2 snake robot showing its kinematic configuration. The solid green line is the pitch joint, and the dashed red line is the yaw joint.
第3章 先 行 研 究 で 実 現 し た 移 動 形 態 19
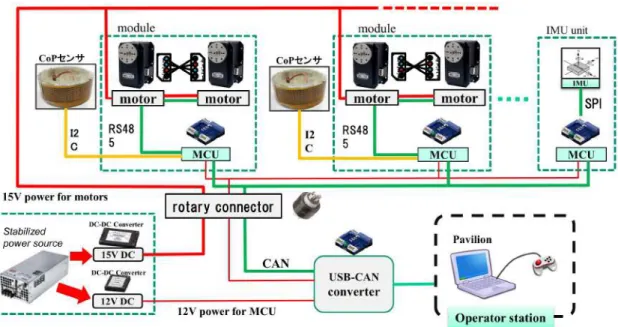
Fig. 3.4:System configuration of normal V2 snake robot.
Fig. 3.5:System configuration of normal V2 snake robot.
第3章 先 行 研 究 で 実 現 し た 移 動 形 態 20 設 計 し た .以 前 はXH430-W350の オ プ ション パ ー ツ で あ るFR12-H101KとFR12-S102K を ボ ル ト と ナット で 固 定 し た も の を 使 用 し て い た .こ の 純 正 品 の フ レ ー ム は2つ の パ ー ツ を ボ ル ト と ナット で 固 定 し て い る た め に ,そ の 部 分 の 緩 み が 発 生 し や す く,
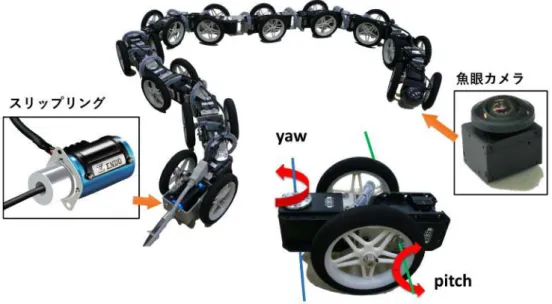
か つ そ の 部 分 の ボ ル ト の 締 め 直 し は 構 造 上 手 間 が か かった .そ こ で ,フ レ ー ム の 分 解 防 止 が で き る よ う に2パ ー ツ を 一 体 化 し たFig.3.4の ア ル ミ 製 フ レ ー ム を 設 計 し た .ア ル ミ 製 フ レ ー ム はA5052P耐 食 ア ル ミ(AL-Mn系)を 使 用 し ,作 成 は 外 部 の 板 金 メ ー カ に 委 託 し た .ま た ,信 号 線 と 電 源 ケ ー ブ ル を 保 護 す る た め ,各 リ ン ク の フ レ ー ム に 取 り 付 け る 外 装 を 設 計 し た .す べ て の 外 装 を3Dプ リ ン タ を 使 用 し て 作 成 し ,素 材 に はABSを 用 い た .さ ら に ,ロ ボット が 配 管 の 外 周 に 巻 き 付 い て 移 動 す る 際 に ,よ り 大 き な 把 持 力 を 得 る た め に 特 注 の ス ポ ン ジ ゴ ム を 外 装 に つ け た .モ ー タ の 可 動 範 囲 は±90◦と 設 定 し た. 一 リ ン ク の 長 さ71.75[mm],径70[mm](ス ポ ン ジ ゴ ム の 径)質 量3.0[kg]で あ る .ロ ボット の 最 後 尾 に は ス リップ リ ン グ が 取 り 付 け ら れ て お り,ロ ボット が 捻 転 運 動 を 行 なって も コ ー ド が 捩 れ な い よ う に なって い る .
ソ フ ト ウェア シ ス テ ム 構 成 はjyanome 2号 機 と 同 様 で あ り,ROSに 基 づ い た シ ス テ ム を 構 築 し て い る .制 御 用PCと サ ー ボ モ ー タ はRS485規 格 の 通 信 で 特 定 の コ マ ン ド を モ ー タ に 送 信 す る .ヘ ビ 型 ロ ボット の 各 関 節 の 目 標 角 度 を 個 別 に 設 定 す る こ と が 出 来 る .な お ,ヘ ビ 型 ロ ボット の ア ク チュエ ー タ へ は 外 部 の 安 定 化 電 源 か ら15[V]
の 電 圧 が 供 給 さ れ て お り,最 大 で4.80[N·m]の ト ル ク を 出 力 で き る .
3.1.3 ハ イ パ ワ ー タ イ プ ヘ ビ 型 ロ ボット
ハ イ パ ワ ー ヘ ビ 型 ロ ボット は 全 長 約2.0[m],質 量 約9.0[kg]で ,車 輪 非 搭 載 ヘ ビ 型 ロ ボット で あ る .配 管 や ダ ク ト 内 に 沿って 移 動 さ せ ,掃 除 や 点 検 作 業 を す る ロ ボット と し て 開 発 さ れ て い る .Fig. 3.6に 示 す よ う に ,ロ ボット の 外 周 に は ロ ボット と 配 管 と の 間 の 摩 擦 力 を 高 め る た め に ス ポ ン ジ ゴ ム が 巻 か れ て い る .こ の 隙 間 テ ー プ は ス ポ ン ジ 状 の 素 材 でEPDM発 泡 体 で あ り,幅 は20[mm],厚 さ は10[mm]で あ る .こ れ を ロ ボット に 重 に 巻 き 付 け て い る .ロ ボット 全 体 を 制 御 す るPCや 電 源 は 外 部 の 設 置 さ れ て お り,こ れ ら の 機 器 へ の 接 続 の た め ロ ボット 後 部 か ら 外 径10.4[mm],長 さ 約 10[m]の ハ イ フ ロ ン 被 覆 の6芯×15AWGの ケ ー ブ ル が 接 続 さ れ て い る .ま た ,螺 旋 捻 転 運 動 時 に ケ ー ブ ル の 捻 じ れ 捩 れ を 解 消 す る た め に ,ロ ボット の 後 部 に ソ ル ト ン 社
第3章 先 行 研 究 で 実 現 し た 移 動 形 態 21
Fig. 3.6:Hight-Power type snake robot
製 の ロ ー タ リ コ ネ ク タrotary630を 搭 載 し て い る .ロ ボット の 先 頭 に は ,配 管 内 を モ ニ タ す る た め の カ メ ラ と し てGoPro社 製HERO5を 搭 載 し て い る .ま たLEDの 照 明 と し て ,NEEWER社 製LEDリ ン グ 撮 影 用 ラ イ ト を 搭 載 し て い る .カ メ ラ 映 像 は 無 線 通 信 に よ り 転 送 さ れ オ ペ レ ー タ の 手 元 に あ るApple社 製iPad Air2に 映 し 出 さ れ る . こ の ヘ ビ 型 ロ ボット は ,ピッチ 軸 と ヨ ー 軸 と が 交 互 に な る よ う に 屈 曲 す る 関 節 を 直 列 に 配 置 し て 構 成 さ れ て お り,合 計 20個 の 関 節 を 持 つ .こ こ で 関 節 を 駆 動 す る サ ー ボ モ ー タ に はROBOTIS社 製Dynamixel MX-106を 採 用 し て い る .サ ー ボ モ ー タ 間 の 接 続 に は 通 常Dynamixelの 純 正 品 の ア ル ミ フ レ ー ム が 組 み 合 わ さ れ て 使 わ れ る が ,実 験 に お い て 部 材 の 塑 性 変 形 を 防 止 す る た め に ,新 た にSUS304-CPの 材 質 の1 枚 も の の フ レ ー ム を 特 注 で 設 計 製 作 し た .
Dynamixelは あ る 程 度 の 数 で あ れ ば 電 源 線 と 信 号 線 を 直 列 に 接 続 し て 使 用 す る こ と が で き る が ,20個 を 直 列 に つ な ぐ と 電 源 か ら 離 れ る に し た がって 電 圧 降 下 が 起 こった り,通 信 速 度 に 制 約 が 生 じ る .そ こ で ,Fig. 3.7に 示 す よ う に ,サ ー ボ モ ー タ 2個 に つ き1個 の マ イ コ ン にTHK 社 製SEED MS1Aを 使 用 し て い る .ロ ボット の 超 小 型USBシ リ ア ル 変 換 モ ジュー ルAE-FT234Xを 接 続 し た マ イ コ ン で 独 自 に 構 成 し た USB-CAN converterを 介 し てPCと 通 信 を 行って い る .ま た, IMUセ ン サ を 搭 載 し た マ
第3章 先 行 研 究 で 実 現 し た 移 動 形 態 22
Fig. 3.7:System diagram of the hight power snake robot platform
イ コ ン が ロ ボット の 先 頭 付 近 に 搭 載 さ れ て い る .す べ て の マ イ コ ン は 共 通 のCAN バ ス に 接 続 さ れ て 通 信 が 行 わ れ て い る .
ロ ボット へ の 電 源 と し て ,定 格 出 力 電 圧48[V],定 格 電 力1000[W]の 安 定 化 電 源 で あ る .TDK-Kambda社 製HWS100-48を 使 用 し て い る .こ の48[V]の 電 源 をDCDCコ ン バ ー タ で 適 切 に 電 圧 変 換 し て ,ロ ボット の 各 機 器 へ と 電 力 を 供 給 す る .サ ー ボ モ ー タ に 対 し て はCOSEL社 製CDS4004815を 介 し て15[V]の 電 源 が 供 給 さ れ ,マ イ コ ン に はCOSEL社 製CBS2004812を 介 し て12[V]の 電 源 が 供 給 さ れ て い る .
3.2 先 行 研 究 で 実 現 し た 移 動 形 態
3.2.1 横 う ね り 推 進
本 節 で は ,jyanome2号 機 を 用 い て 横 う ね り 推 進 を 再 現 す る .Hiroseら は 生 物 の 蛇 の 横 う ね り 推 進 は サ ー ペ ノ イ ド 曲 線(serpenoid curve)と 呼 ば れ る 曲 線 に 沿って 移 動 し て い る こ と を 明 ら か に し ,摩 擦 の 差 を 生 じ る メ カ ニ ズ ム を 受 動 車 輪 に よ り 工 学 的 に モ デ ル 化 す る こ と で2次 元 平 面 上 を 滑 ら か に 移 動 す る ヘ ビ 型 ロ ボット を 実 現 し た .Fig. 3.8に 示 す よ う に ,サ ー ペ ノ イ ド 曲 線 は「 曲 率 が 曲 線 に 沿って 正 弦 波 に 変 化 す る 曲 線 」で あ る .二 次 元 平 面 上 の 横 う ね り 推 進 を す る ヘ ビ 型 ロ ボット の 体 幹 を
第3章 先 行 研 究 で 実 現 し た 移 動 形 態 23
Fig. 3.8:Serpenoid curve
yaw軸 の 曲 率κyaw(s)とpitch軸 の 曲 率κpitch(s)で 表 記 す る と ,次 式 の よ う に 示 さ れ る [19, 20, 38].
κyaw(s) κpitch(s)
=
απ2l sin(sπ2l) +bias 0
(3.1)
αは 曲 線 の く ね り 角 で ,lは1/4周 期 長 さ ,sは 曲 線 上 の 位 置 で あ る .biasは 操 舵 量 で あ リ,横 う ね り 推 進 の 移 動 方 向 を 調 整 す る こ と が で き る .横 う ね り 推 進 は 平 面 上 の 運 動 で あ る た め ,pitch軸 の 曲 率κpitch(s)を 常 に0と 設 定 す る .
実 機 に 実 装 す る 際 に ,計 画 し た サ ー ペ ノ イ ド 曲 線 に 沿って 移 動 す る 速 度νを 入 力 量 と す る .速 度νに よ り 単 位 時 間 内 曲 線 に 沿って 移 動 す る 距 離( 曲 線 上 の 位 置 )s を 算 出 し た 後 ,(3.1)式 に よ り 曲 率 を 求 め ,(2.11)式 に よ り 各 関 節 の 目 標 角 度 を 算 出 す る .ま た ,オ ペ レ ー タ か ら 各 パ ラ メ ー タ 調 整 す る こ と で ロ ボット の 形 状 を 変 化 さ せ る こ と が で き る .Fig.3.9に 示 す よ う に ,筆 者 ら は サ ー ペ ノ イ ド 曲 線 に よ る ヘ ビ 型 ロ ボット の 推 進 実 験 を 再 現 し た .受 動 車 輪 に よ り 摩 擦 の 異 方 性 が で き た た め , ロ ボット は 前 進 す る こ と が 確 認 さ れ た .推 進 中 ,受 動 車 輪 が 横 に 滑 ら な い(sideslip constraints)と 仮 設 す る と ,横 う ね り 推 進 は ロ ボット の 体 幹 形 状 に 沿って 接 線 方 向 へ 移 動 す る2次 元 運 動 で あ る .
第3章 先 行 研 究 で 実 現 し た 移 動 形 態 24
Fig. 3.9:Serpentine locomotion
3.2.2 Sinus-lifting推 進
前 節 で は ,ヘ ビ 型 ロ ボット の 横 う ね り 推 進 を 基 本 的 に 平 面 上 の 運 動 と 考 え で 体 幹 形 状 を 設 計 し た .一 方 で ,生 物 蛇 は 全 力 で 滑 走 す る 際 に ,Fig.3.10に 示 す よ う な
「Sinus-lifting」と い う 体 幹 の 最 大 屈 曲 部 分 を 地 面 か ら 浮 か せ て 推 進 す る 滑 走 様 式 が 観 察 さ れ て い る .こ の 滑 走 様 式 は 法 線 方 向 の 地 面 反 力 が 最 大 と な る 変 曲 点 付 近 に 体 重 を 集 中 さ せ て 横 滑 り を 防 ぐ た め の 適 応 的 な 行 動 で あ る[19, 46].先 行 研 究 に よ り,Sinus-lifting推 進 は 半 周 期 ご と に 体 幹 の 最 大 屈 曲 部 分 を 地 面 か ら 浮 か せ て 推 進 す る た め ,以 下 の よ う に ,横 方 向 の う ね り と 縦 方 向 う ね り を 加 え る こ と で 実 現 す る こ と が で き る .
κyaw(s) κpitch(s)
=
αyaw2l πsin(2πsπ2l) +biasyaw αpitchπ
2l sin(4πsπ2l) +biaspitch
(3.2)
αyawとαpitchは そ れ ぞ れyaw軸 とpitch軸 方 向 へ の 曲 線 の く ね り 角 で ,lは1/4周 期 長 さ ,sは 曲 線 上 の 位 置 で あ る .biasyawとbiaspitchは 操 舵 量 で あ る が ,ロ ボット の 移 動 中 基 本 的 に 横 方 向 だ け 操 舵 を 行 う.縦 方 向 の 操 舵 をbiaspitch = 0と 設 定 す る .
実 機 に 実 装 す る 際 に ,計 画 し た サ ー ペ ノ イ ド 曲 線 に 沿って 移 動 す る 速 度νを 入 力 量 と す る .速 度νに よ り 単 位 時 間 内 曲 線 に 沿って 移 動 す る 距 離( 曲 線 上 の 位 置 )sを 算 出 し た 後 ,(3.3)式 に よ り 曲 率 を 求 め ,(2.11)式 に よ り 各 関 節 の 目 標 角 度 を 算 出 す る .(3.3)式 に よ り 算 出 し た 曲 率 をFig. 3.12に 示 す.本 論 文 で はFig. 3.11に 示 す よ う
第3章 先 行 研 究 で 実 現 し た 移 動 形 態 25
Fig. 3.10:Sinus lifting motion of a snake.
Fig. 3.11:Sinus-lifting
に ,jyanome 2号 機 を 用 い てsinus-lifting推 進 を 再 現 し た .Sinus-lifting推 進 は ロ ボット の 体 幹 形 状 に 沿って 接 線 方 向 へ 移 動 す る 三 次 元 運 動 で あ る .
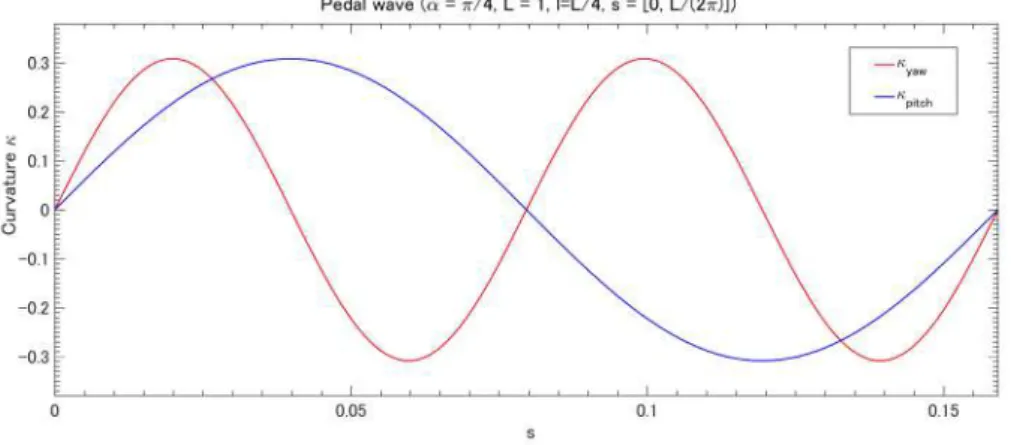
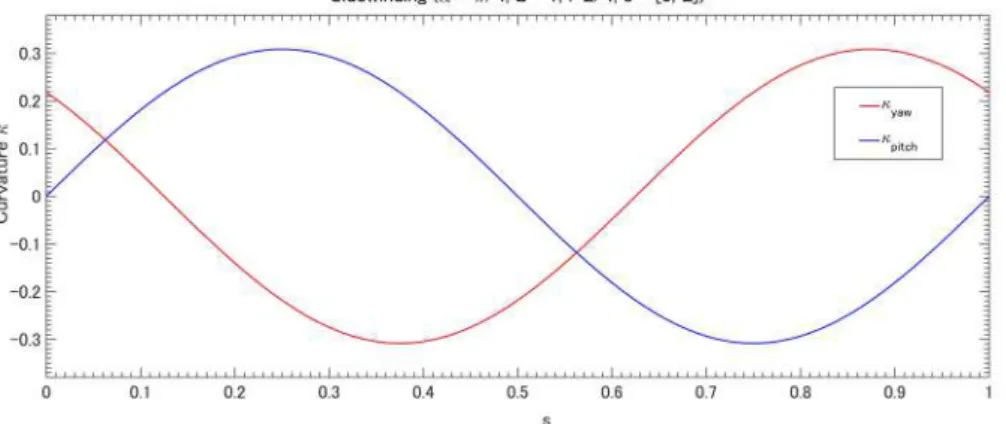
3.2.3 Pedal wave推 進
Pedal wave推 進 は 地 面 と 垂 直 な 方 向 に 体 を 波 打 た せ ,尺 取 虫 の よ う に 這って 進 む 移 動 方 式 で あ る .Yamadaら の 研 究 に よ り,本 来 は カ タ ツ ム リ な ど の 腹 足 動 物 の 運 動 に 使 用 さ れ て い た「Pedal wave」と 呼 ば れ て い る[58].垂 直 波 動 き と 同 じ 方 向 に 移 動 す る の は 似 て い る .
本 論 文 で は ,Pedal wave推 進 に は2次 元 と3次 元Pedal wave推 進 が あ る .2次 元Pedal wave推 進 は3.2.1節 で 紹 介 し た 横 う ね り 推 進 に 対 し て ,yaw軸 関 節 の 目 標 角 度 を 常 に0と し て ,pitch軸 関 節 に 目 標 角 度 を 送 る だ け で 実 現 で き る .3次 元Pedal waveは sinus-lifting推 進 と 似 て い る .本 論 文 で は ノ ー マ ルV2を 用 い て2次 元Pedal wave推 進