加速度センサを用いた二輪車用スマートフォンUI
8
0
0
全文
(2) 情報処理学会研究報告 IPSJ SIG Technical Report を,ポケットや鞄に入れたまま運用することになる.この 方法では視覚的なサービスを受けることはできないが,ヘ ルメットに装着するスピーカーのコストのみでナビゲーシ ョンアプリの恩恵を得ることができる. そのため,そのような利用方法を取っているユーザを対 象とする場合,スマートフォンを二輪車で快適に運用する ための端末も低コストである事が望ましいと考えている. また,二輪車でのスマートフォンサービスは運転者一人. Vol.2015-ITS-61 No.11 Vol.2015-CDS-13 No.11 2015/5/22. 2. 車載器として UI の要求 2.1 既存の操作 UI の問題点 現在既存のナビゲーションデバイスの操作 UI として主 流となっているのは,スマートフォン,PND のどちらもタ ッチディスプレイを用いたタッチ操作である.そのため, 本節では,タッチ操作の問題点を述べる. まず,タッチパネルを用いた端末の操作は,以下の 3 ス テップの繰り返しからなる.. を対象にしているため,映像や文字のコンテンツを表示す る必要性は無く,現在スマートフォンのナビゲーションサ ービスを利用する際は,ポケット等に入れるか,ハンドル やタンク,ミラーなどにステーを使いスマートフォンを取 り付け,イヤホンや Bluetooth 接続のオーディオ機器を通し て音声案内やオーディオ機能を利用する形が一般的であり, 視覚的な情報表示の必要性は薄いといえる. そのため,二輪車を利用している際のスマートフォンサ ービスでは,音声ナビゲーションとオーディオ機能,通話 等の聴覚を使った機能があれば十分であると考え,運転中 の利用サービスは音声を用いた物に絞ることで,視認性の 問題はないといえる。 しかし,現状のスマートフォンでは音声を主体としてサ ービスを利用していても,操作を行う上で体勢の変化や,. (1). 画面内の行いたい操作用のボタンの場所を視覚的 に確認する.. (2). 確認したボタンの位置に指で触れる.. (3). 操作が間違いなく行われたかを視覚的に確認する.. このような特徴を持つ操作 UI であると,目的のタスク が全て完了するまでは, 画面内を注視し続ける必要があり, もし途中で周囲を確認すると,その分タスク完遂までの時 間が延びてしまう.また,二輪車に乗る際に装着するグロ ーブは,静電容量式のタッチパネルの操作が行えないため, 操作を行う際にはグローブを外す必要があり,操作中は着 けることができない.操作の際にこれらの操作があること による問題点として以下の点が挙げられる.. 注視が必要となる. そこで,本論文では残る操作性の面に着目し,利用者が 音声サービスを利用していることを前提とした,操作時に 手元を注視する必要のない操作デバイスとして,加速度セ. (1). ボタン位置や操作完了を確認する際の視線逸脱.. (2). 操作の際に手を離し,体制を崩すことにより,運転動 作に戻るまでに時間がかかる.. ンサを用いた操作インターフェースを提案する. 第 2 章では二輪車向けスマートフォン操作 UI の要求につ いて述べる.第 3 章では関連技術、関連研究について述べ る.第 4 章では第 2 章で述べた要求を踏まえた提案手法に ついて述べる.第 5 章では,まとめと今後の方針について 述べる.. これらの問題により,二輪車ユーザは多くの場合,図 3 に示すように信号待ちなどの短い停止中に行いたいタスク を完遂することはできない.. 3. 関連技術 3.1 マウント形態 3.1.1. 現状の 2 輪車向け端末. 二輪車ではダッシュボードのスペースが無いため,四輪 車のようなインダッシュ型のナビゲーションデバイスを利 用することはできない.そのため,取り付けや取り外し, 持ち運びが容易な携帯型端末である PND を図 4 に示すよう. 図 3 既存の UI の課題. ⓒ2015 Information Processing Society of Japan. 図 4 PND 型の取り付け[5][7]. 2.
(3) 情報処理学会研究報告 IPSJ SIG Technical Report にハンドルやタンクにマウントして,オンダッシュデバイ スに近い形で運用されてきた.. Vol.2015-ITS-61 No.11 Vol.2015-CDS-13 No.11 2015/5/22. 3.2.2 カメラによる操作 遠隔操作に関しては,赤外線やカメラを用いて機器を操. 中でも防水機能や,Bluetooth,グローブ越しでの利用を. 作する手法が数多く提案されている.赤外線やカメラを用. 想定した操作 UI を搭載したオートバイ向け端末が市販さ. いて操作を行う場合,各身体動作に対応する操作を定義す. れており,ほとんどの場合に二輪車で利用するナビゲーシ. ることにより,音声認識を用いる手法と同様に画面の注視. ョンデバイスは PND 型である.しかし,先述の取り外しが. が必要なく,従来の操作よりも迅速に運転動作に戻ること. 容易なため,盗難対策や落下防止のため,車両から離れる. ができる.. 場合には持ち運ぶ必要がある 3.1.2 HUD 型 近年登場した,HUD とは二輪車向けにヘルメットのシー. 文献[10]では,指先に目印となるマーカを装着すること によって,安価な USB カメラを利用してジェスチャ認識を 実現する方式提案している.. ルドに映像を投影する端末である.HUD デバイスでは,視. 文献[11]では,深度カメラによって得られた深度情報を. 線を前方に向けたまま,視覚的なナビゲーションをうける. 用いて,運転者の姿勢まで考慮したジェスチャを認識する. ことができ,既存のナビゲーションデバイスよりも快適性,. 手法を提案している.. 安全性の高いデバイスである.. また,赤外線処理と画像処理を組み合わせたデバイスと. 既にヘルメットに取り付ける後付タイプの端末が登場して. して Leap Motion[12]と言うモーションキャプチャデバイス. おり,スマートフォンと連携するヘルメット一体型のデバ. が登場しており,ユーザの動きを事細かに判別することが. イスも登場している.現在は高額なため普及していないが,. できる.しかし,端末に対して影になってしまった部分は. 将来的に主流の UI になると考えられる.. 読み取ることができないため,屋外で利用する難しい.ま. 3.2 遠隔操作. た,二輪車においてこれらの手法を活用するためには,身. 3.2.1 音声による操作. 体動作を認識できる車体の個所に装置の取り付けを行う必. 音声認識を用いた手法が数多く提案されている.音声認識. 要がある.そのため,取り付けスペースの問題や,防水の. を用いて機器の操作を行う場合,画面の注視や両手を用い. 対策,盗難のリスクがあり,これらのリスクから高額なデ. る必要がない.そのため,二輪車での移動中において視線. バイスを守るためには,使用しない場合にも持ち歩く必要. 逸脱や運転姿勢の崩れによる事故リスクを大幅に削減する. がある.. ことができる.. また,日中と夜間の明度の差にも影響を受けるため,屋. 文献[7]では,ベリフェラルモジュールとサーバモジュー. 外で利用するには適さない.車体に直接マウントすること. ルに機能を分散させて実装することにより,安価な組み込. による振動の影響があり,認識率に悪影響を及ぼす可能性. みボード上で実装可能な音声入力アーキテクチャを提案し. があり,多くの研究は室内での操作を前提としており,運. ている.. 転中の操作にそのまま活用することができない.. 文献[8]では,ユーザ負荷の観点から対話戦略を評価し,. 3.2.3 センサによる操作. ユーザ主導,システム主導の対話システムのメリットとデ. 加速度センサやジャイロセンサなどを用いて機器を操. メリットを調査し,ユーザ負荷を考慮した対話戦略の検討. 作する手法が数多く提案されている.センサを用いて操作. を行っている.. を行う場合,マイクやカメラによる操作と同様に,画面の. 文献[9]では,バイク走行時にマイクが拾う雑音の多くが. 注視が必要なく,従来の操作よりも迅速に運転動作に戻る. 風切り音であることに着目し,類似した雑音が発生する空. ことができる.また,カメラによる操作とは異なり,ジェ. 洞環境で収録した音声データで構築したモデルを使う事に. スチャを行う部位に装置を取り付ければ良いため,車体に. より,走行環境課でも市販認識ソフトより高い認識率を得. 装置備え付けることによるリスクがない.. られていることを報告しており,それを用いた楽曲検索シ ステムを提案している.. 文献[13]では,スマートフォンと同期を取り大きなタッチ パネルで入手力可能な Display Audio を用いることを想定. しかし,音声認識を用いた手法では階層的に処理を行う. し,スマートフォン通常の操作に近いタップジェスチャー. 必要があり,必然的に操作数が増加してしまう.また,多. による操作方式を提案しており,加速度のみでなく角速度. くの研究は室内での操作を想定しており,二輪車において. を利用することで上下左右の 4 方向へのタップ及びダブル. マイクによる入力を行う場合,風や周囲の騒音の影響を大. タップの計 8 種類のジェスチャを認識する,グローブ型デ. きく受けるため,ノイズ除去などの処理が必要となるため. バイスを用いた 4 輪車向けスマートフォン操作 UI を提案. 処理時間が増加する.更に現在の音声認識自体の処理速度. している.. も十分ではない.これらの理由により信号待ちなどの短い. 文献[14]では,HMD の装着を前提とした,あらゆる環境. 時間で操作を行うことを想定している本研究では,これら. でのジェスチャ入力を可能にするため,両手両足の計 4 か. の手法をそのまま活用することはできない.. 所に取り付けた加速度センサデバイスを状況に応じて使い. ⓒ2015 Information Processing Society of Japan. 3.
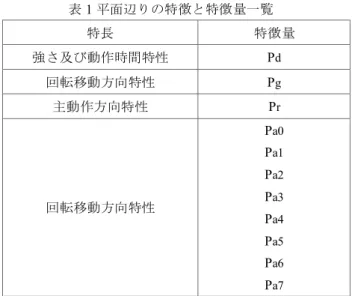
(4) 情報処理学会研究報告 IPSJ SIG Technical Report 分けることで,物を持っていて手が使えない場合や,電車 内等の足でジェスチャをするスペースが無い場合にも対応 した操作デバイスを提案している.この研究では,HUD の 装着を前提とした,日常生活を想定しているため,こちら も選択式メニューを見ながら操作を行う事を前提としてい る.しかし、通常の二輪走行時にセンサデバイスを 4 か所 につけることは通常は想定できない. 文 献 [15] で は , 動 的 計 画 法 を 用 い た Dynamic Programming(DP ダイナミックプログラミング)マッチング を用いたジェスチャ認識を用いて,主動作の特性を生かし たジェスチャのしきい値設定や,状況認識用センサを利用 することにより認識精度と自由度の高いジェスチャ認識シ ステムを提案している. 文献[16]では,加速度センサの三軸を y–z ,z–x ,x-y の 3 つの平面に分解し,各ベクトルから 11 種類,総計 33 種類の定義された特徴量を用いた,パターンマッチングに より判別する方式を提案しており,事前にパーソナライズ を行い,ジェスチャの速度や角度が再現しやすい平面的な ジェスチャに絞ることで,非常に高い認識率を得られるこ とを示しているが,ジェスチャ認識の手法についてのみ述 べられており,特定の使用目的を想定した実験が行われて いない. また,これらの研究は室内での操作を前提としており, 二輪車の運転中における機器の操作を想定していないため, そのまま活用することはできない. 加速度などのセンサは小型のモジュールを防水対策する ことで,雨風といった外乱の対策することが可能であるが, 振動などの外乱の影響を受けやすい. また,近年登場しているウェアラブルデバイスとして, 指輪型[17]や腕時計型[18]のデバイスがあり,それらを利用 して日常時にも利用することが考えられたが,これらは大 きさや体に取り付ける個所などの問題から運転中に利用す るには適さないため難しい.. Vol.2015-ITS-61 No.11 Vol.2015-CDS-13 No.11 2015/5/22. 4. 提案方式 二輪車上においてナビゲーション端末を操作する場合, 第 2 節で述べた操作時間が短く,運転姿勢の崩れが最小限 で,操作に画面の注視を必要としない,無線方式で独立し ている装置である端末である必要がある. 第 3 節で述べたとおり,音声認識や光学方式による操作 では,操作時間の増加の問題や,外乱による影響を受けや すいという問題があり,信頼性や快適性に欠けてしまう. そこで,加速度センサを用いた,音声認識や光学方式よ りも低コストで,外乱の影響を受けることのない操作方式 を提案する. 利用環境は,スマートフォン端末を用いたナビゲーショ ンサービス及び,音楽再生や通話機能といった音声のみで 利用できるサービスを利用することを想定し,機能を限定 することにより判別を行うことが可能である.ジェスチャ 認識の手法としては,文献[16]にて用いられている特徴量 を用いたパターンマッチングを採用することで,将来的に ジェスチャの種類の増加や HUD とも連携を行うことがで きると考えられる. 4.1 ジェスチャ認識 4.1.1 認識手法概要 図 5 に示すような構成を考え,特徴量とは,加速度セン サから得られた X 軸 Y 軸 Z 軸の 3 軸のうち,図 6 に示す ように,それぞれ 2 つを組み合わせた擬似的な 3 平面 y-z, z-x,x-y に加速度データから射影した 2 次元ベクトルから 得られる値である.各ベクトルからは,動きの強さ,回転 移動方向, 主動作の方向, 方向分布の 4 種類の特性があり, 方向分布特性は 8 つの方向の分布を示すため,合計で 33 種類の特徴量を得る. 事前に登録した特徴量の値と,入力されたジェスチャか ら得られた値をパターンマッチングによって比較すること でジェスチャ認識を行う. 4.1.2 特徴量定義 本論文における特徴量とは 4.1.1 節にて述べたとおりサ ンプリングした x , y , z の 3 軸のうち二つの値を,平面上 に射影した際の二次元ベクトルを用いて求める.1 平面に. 図 5 提案方式の構成. ⓒ2015 Information Processing Society of Japan. 図 6 各平面上の特徴量. 4.
(5) 情報処理学会研究報告 IPSJ SIG Technical Report. Vol.2015-ITS-61 No.11 Vol.2015-CDS-13 No.11 2015/5/22. 表 1 平面辺りの特徴と特徴量一覧. 包し,かつ最大値と最小値に外接する四角形の縦横比であ. 特長. 特徴量. り,式(5)で求める.また,ah は水平方向のベクトル成分を. 強さ及び動作時間特性. Pd. 表し,av は垂直方向のベクトル成分を示す.また,水平方. 回転移動方向特性. Pg. 向の最大値を Hr+,最小値を Hr-とし,垂直方向のベクトル. 主動作方向特性. Pr. 成分最大値を Vr+,最小値を Vr-とする.. Pa0 Pa1 Pa2 回転移動方向特性. Vt Vt . Pr . (5). Hr Hr . Pa3. Hr max(a h ) , Hr min(a h ) ,. Pa4. Vr max(a v ) , Vr min(a v ) .. Pa5 Pa6 Pa7. (6). ah :A’s Horizontal Compon a v :A’s Vertical Component 方向分布特性とは, 各平面上の主な方向へのベクトルの偏 りを表すものであり,次式(7)で求める.本論文では 45°毎. つき求められる特徴量は以下の 4 種類である.1 平面から. の 8 方向とし,Pa0~Pa7 の計 8 つとした.各平面上の水平. 得られる特徴量の一覧を表 1 に示す.. 方向にあたる-180°又は 180°を Pa0 として,次に-135°が Pa1 となっている.以降 45°毎に Pa2,Pa3 となる.8 種類. (1). 強さ及び動作時間特性. の方向分布特性は次式(7)で表すことができる.ここで用い. (2). 回転移動方向特性. る Fn とはメンバシップ関数であり,Fn を用いて一連の加. (3). 主動作方向特性. 速度データの各ベクトルへの所属度をファジー集合的に決. (4). 方向分布特性. 定する.また,θt は,時間 t におけるベクトルΔA(t)の平 面上の角度である.. 強さ及び動作時間特性(Pd)とは,平面上のベクトルの距 離の総和であり式(1)で表すことができる.また, A(t ) は. S. Pan . S 1. Pd . A(t ). (1). t 1. n. (7). t. t 1. 時間 t の場合のベクトル A(t ) と A(t 1) 間におけるベクト ル差分を表し,式(2)で求める.また,S はジェスチャのサ ンプリング数であり,t の上限値である.. F ( ). Fn ( t ) :Membership Function of n-th main direction. t :Direction of A(t). n : 0,1,2,…7.. 4.1.3 相違度(e) 相違度とは,入力された加速度データと,登録されてい. A(t ) A(t 1) A(t ). (2). るジェスチャの特徴量がどの程度の近似度を示すものであ (5.2) る.相違度が低いほど近似度が高くなり,相違度(e)は式(8). A :2D Acceleration Vector S :Sampling Number. で求める.相違度(e)は,特徴量αごとの重み付き誤差εの. 回転移動方向特性(Pg)とは,各ベクトル差分の移動方向が. データの特徴量平均との二乗誤差を登録データの特徴量標. 総和であり,重み付き誤差とは入力データの特徴量と登録. 原点から見て時計回りの方向ならば 1,時計回りであれば 0. 準偏差の二乗(分散値)で割ったものである.. とした数値の総和であり, の移動方向はベクトル と の外. 一回のジェスチャにつき,全ての登録ジェスチャとの相. 積を用いて,式(3)により求める.求められた外積の値が 0. 違度を求め、一番低い値のものを該当ジェスチャとして認. 以上であれば 1,0 未満ならば 0 を返す判別式(4)を用いて. 識する.. 計算を行う.. eg . S 1. Pg . . u ( A(t ) A(t 1)). (3). t 1. 1 : 0 m, u ( m) 0 : 0 m.. 主動作方向特性(Pr)とは,各平面上の全てのベクトルを内. ⓒ2015 Information Processing Society of Japan. α. V1 (4). . g εα. . α. (Vα1 Eαg ) 2 (μαg ). (8). :Parameter Value of Input Acceleration Data. 5. 試作評価 5.1 基本実験 走行時には車体の加減速や,振動の影響により加速度セ. 5.
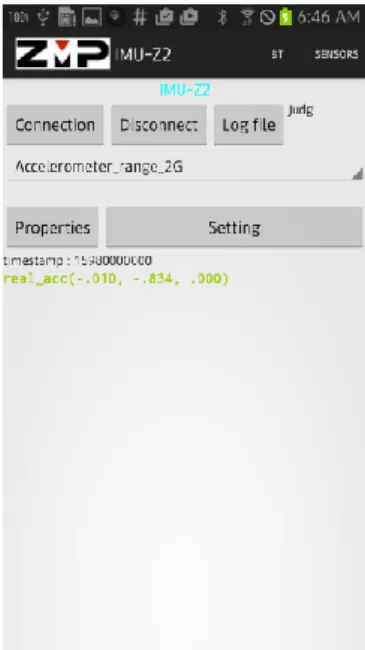
(6) 情報処理学会研究報告 IPSJ SIG Technical Report. Vol.2015-ITS-61 No.11 Vol.2015-CDS-13 No.11 2015/5/22. 表 2 利用機材及び開発環境 機材種別 HW. Android 端末 加速度センサ. 名称. 製造・開発元. GalaxyS3 IMU-Z2. 20). SAMSSUNG. 19). ZMP. Eclipse IDE アプリ. 開発環境. for Android. IBM. Depelopers 図7. 実験センサの装着方法. 開発 PC. EclipseIDE forAndroid. GalaxyS3. IMU-Z2. Depelopers. 図 10 GalaxyS3 と試作環境の構成図. 図 8 加速度センサを装着した際の走行時加速度実測値. が出る PrYZ や,走行時に特徴が出る PsXY などが見てと れ,走行時の操作制限などに利用できると考えられる. 5.2. 試作実験環境. 試作にあたって利用した機材および環境を表 2 に示す. 試作したアプリケーションは図 10 に示すように Android 端 末上で動作する Android アプリケーションで,加速度セン サ IMU-Z2 から送信された XYZ の 3 軸の加速度情報を受け 取り,3 平面の特徴量に変換,比較し,ジェスチャを認識 するアプリケーションである.試作環境の構成図を図 10 に示す. 5.3 試作アプリケーション 図 9 加速度センサを装着した際の走行時特徴量実測値. スマートフォンと操作用装置を無線で繋いだ加速度ジ ェスチャ認識の操作感覚や認識率,特徴量を計測し検証す るため,Android 上で動作するアプリケーションを実装し. ンサの値に影響を与える可能性がある.走行中にそれらの 影響を避けることはできないが,本論文では信号待ちなど の短い停車中を想定しているため,特にエンジンの振動が 問題になる可能性があると考えられる. そのため,基礎実験では二輪車上で用いることにより加 速度センサの値に影響が発生するかを調査するために図 7 に示すようにグローブに加速度センサ(IMU-Z219)を装着 して走行し,Bluetooth でスマートフォンと接続,後述の開 発アプリにて加速度および特徴量の取得を行った.その結 果を図 8,9 に示す. 図 8 の生の加速度値のグラフからは,発進,加速,停止. た. 試作したアプリケーションは,まず加速度センサ IMU-Z2 から加速度値を取得し,複数回のジェスチャを行 うことで,そのジェスチャの特徴量平均をサンプルデータ として保存する.全てのジェスチャのサンプルデータを保 存後,サンプルデータと入力値の相違度を求め,もっとも 相違度の低いジェスチャに割り当てられた動作を行うパタ ーンマッチングによるジェスチャ認識を行うアプリケーシ ョンである.短いジェスチャでも十分なデータを得るため に,サンプリングレートは 50ms とした. ジェスチャ認識を行うための動作フローチャートを図. のそれぞれがはっきりと分かる違いが出ており,特に停止. 11 に示す.作成したアプリは,Connection スイッチを押す. 中には大きなノイズは発生していない.そのため,停車中. ことでセンサとペアリングし,50ms 毎に加速度を取得する.. であればジェスチャ認識に問題はないと考えられる. 図 9 の特徴量のグラフからは,発進加速時に大きな特徴. ⓒ2015 Information Processing Society of Japan. 次に Setting キーを押し,押している間にジェスチャを行 うことで,行ったジェスチャが記録される.この登録作業. 6.
(7) 情報処理学会研究報告 IPSJ SIG Technical Report. Vol.2015-ITS-61 No.11 Vol.2015-CDS-13 No.11 2015/5/22. 開始. 加速度センサとのセンシングを開始 既定の回数分をバッファとして保存. 登録用ジェスチャの入力. 入力された加速度値から特徴量を算出. 規定回数の特徴量を 保存した. 図 12 動作受付画面. 特徴量から特徴量平均と二乗誤差を算出しサ ンプルデータとして保存. ジェスチャによる操作入力. 入力された加速度値から特徴量を取得. 特徴量とサンプルデータ n を比較 相違度を求める n+1. 全てのサンプルデータとの 比較が完了している. 図 13 動作認識時の 最少相違度をサンプルデータに 対応したジェスチャを認識し対応した動作を行う. は,ジェスチャ毎にそれぞれ 10 回行い,認識処理にはその 平均特徴量が用いられる.最後に Properties キーを押し,. 終了. 押している間にジェスチャを行うことで,ジェスチャ認識 図 11. を行い,対応する動作を確認すると,ハンドラで“ジェス. ジェスチャ認識フロー. チャ 1”から“ジェスチャ 3”までの対応したジェスチャ名 を表示する.また,log- file ボタンを押すことで,加速度や, 起動中に得られた特徴量,登録された特徴量などを csv 形. 6 種類を表現でき,2 回の動作であれば,操作時間は許容範 囲内であると考えられる.. 式で保存する. 実装したアプリケーションの動作実験として,腕を振り. 6. おわりに. 下げる,腕を横に振る,腕を回すという三つのジェスチャ. これからの自動車ナビゲーションは,スマートフォンの. のサンプルデータを登録し,ジェスチャを行った結果,ア. 高機能化と普及に伴い,二輪車では HUD,四輪車では. プリケーション上で図 12,13 に示すようにジェスチャ認識. Display Audio などのスマートフォンと連携する製品を用い. を確認する事ができた. ることによる,スマートフォンの車載器としての利用が増. しかし,当初の目標では,音楽再生アプリの操作に必要. 加すると考えられる.これらの製品は主にユーザへの情報. な 5 種類のジェスチャに加えて,そのほかのアプリの操作. 出力を快適にするためのものである.そこで,本論文では. に切り替えるための操作を加えた 6 種類のジェスチャを予. 操作性の改善に目を向け,加速度センサを用いた車載スマ. 定していたが,6 種類では全て認識することができなかっ. ートフォン操作端末を提案した.. たため,3 種類に変更したが,2 回の動作を組み合わせれば. ⓒ2015 Information Processing Society of Japan. 基礎研究では,手に装着した加速度センサが,停車時で. 7.
(8) 情報処理学会研究報告 IPSJ SIG Technical Report あれば車両や外部の影響を受けず,室内と同様にジェスチ ャ認識が行えることが分かった. また,二輪車を運転中に行いたい操作は限られていると. Vol.2015-ITS-61 No.11 Vol.2015-CDS-13 No.11 2015/5/22. 17) ログバー: Ring, http://logbar.jp/ring/ja/ 18) ソニー: Smart Watch, http://www.sonymobile.co.jp/product/smartwear/swr50/. いうことに着目することでジェスチャの種類を絞る事で, 加速度センサのみでも,ジェスチャ認識を行うことができ ることがわかった.加速度センサのみの実装であれば,デ バイスは非常にローコストになると考えられる. 今後は利用する特徴量の増加などによる精度の向上が 課題となる.また今回開発したアプリケーションでは,操 作を行うまでに慣れが必要であったため,特徴量どうしの 相違度のみでなく,複数の人間から取った標準特徴量など の利用によることにより直観的に操作を行えるようにする などの点が課題となる. 謝辞. 本研究を進めるにあたりバイクに関して議論し. ていただいた東京都市大学大谷紀子教授に感謝します。ま た有益なコメントを多数いただいた静岡大学木谷准教授に 感謝します。. 参考文献 1) Honda Moto LINC,http://www.honda.co.jp/MotoLINC/ 2) つながるバイクアプリ, http://www.yamaha-motor.co.jp/tsunagaru/app/ Live Map, 3) Live Map,https://livemap.info/ 4) NUVIZ Ride : HUD,http://www.ridenuviz.com/#intro 5) SYGN HOUSE マウントシステム, http://www.bolt.co.jp/bike-mount-system/sygnhouse_mount-system_top .asp 6) TANAX: ナビゲーションタンクバッグ 3, http://www.tanax.co.jp/motorcycle/product.php?goods_id=1874 7) 橋本 諒太, 金 又現, 伊藤 俊廷, 倉光 君郎, 魔法の水晶:音声 インタラクションを備えた Ambient Display の実装, 情報処理学 会研究報告 2007-UBI-016(118), pp31-38, (2007). 8) 山岡 将綺, 原 直, 阿部 匡伸, 車載用音声対話システムにおけ るユーザ負荷を考慮した対話戦略の検討, 情報処理学会研究報告 2014-SLP-101(7), pp.1-6, (2014). 9) 赤坂 貴志, バイク走行環境下での音声認識/音声対話システム の性能向上に関する研究, ヤマハ発動機技術論文 No43, 2007-12. 10) 武藤 亮介, 嶋田 和孝, 遠藤 勉, USB カメラとマーカを用い たハンドジェスチャ認識, 電子情報通信学会講演論文集(2008). 11) 長谷川 秀太, 赤池 英夫, 角田 博保, 姿勢を考慮したハンド ジェスチャを利用する機器操作の提案・評価, 情報処理学会研究 報告 2012-HCI-147(24), pp.1-6, (2012). 12) Leap Motion: Leap Motion Controller, https://www.leapmotion.com/?lang=jp 13) 池上 翔太, 石崎 新, 山辺 教智, 北上 慎二, 梶並 知記, 清 原 良三, スマートフォンカーナビ向け加速度センサデバイス, 情 報処理学会研究報告 2014-GN-90(1), pp. 1-7, (2014). 14) 山本 哲也, 庄司 武, 寺田 努, 塚本 晶彦, ウェアラブルコ ンピューティングのための手足を使った状況依存コマンド入力手 法, 情報処理学会 インタラクション, (2011). 15) 富林 豊, 竹川 佳成, 寺田 努, 塚本 昌彦, 装着型センサを 用いたウェアラブル DJ システムの開発と実運用, 情報処理学会研 究報告 2008-MUS-76(8), (2008). 16) 坂本 翔, ユーザの直観的な入力をとらえるための 3 軸加速 度センサによるジェスチャ認識の研究,公立はこだて未来大学卒 業論文, (2010).. ⓒ2015 Information Processing Society of Japan. 8.
(9)
図
![図 2 ステーを用いた固定 (SYGN HOUSE 製 マウントシステム[5]) 図1 HUD型2輪車用情報端末の例 加速度センサを用いた二輪車用スマートフォンUI 伊藤篤志†1 清原良三†1近年、カーナビなどの車載情報端末は四輪車を中心に普及が進み、現在では標準搭載されている言っても過言ではないほどである。一方バイクにおいては、情報端末を搭載する位置や操作性、見るべき情報などが違うこともあり普及しているとは言い難い。しかし、最近はスマートフォンが登場しており、法律違反ではあるが、イヤホンで聞](https://thumb-ap.123doks.com/thumbv2/123deta/6461080.1633473/1.892.474.810.633.799/マウントシステムスマートフォンUIカーナビスマートフォンイヤホン.webp)
![図 4 PND 型の取り付け[5][7] 図 3 既存の UI の課題 を,ポケットや鞄に入れたまま運用することになる.この方法では視覚的なサービスを受けることはできないが,ヘ ルメットに装着するスピーカーのコストのみでナビゲーションアプリの恩恵を得ることができる. そのため,そのような利用方法を取っているユーザを対象とする場合,スマートフォンを二輪車で快適に運用する ための端末も低コストである事が望ましいと考えている. また,二輪車でのスマートフォンサービスは運転者一人を対象にしているため,映像](https://thumb-ap.123doks.com/thumbv2/123deta/6461080.1633473/2.892.84.418.862.1117/ナビゲーションアプリスマートフォンスマートフォンサービス.webp)
![図 5 提案方式の構成 図 6 各平面上の特徴量 分けることで,物を持っていて手が使えない場合や,電車内等の足でジェスチャをするスペースが無い場合にも対応した操作デバイスを提案している.この研究では,HUDの装着を前提とした,日常生活を想定しているため,こちらも選択式メニューを見ながら操作を行う事を前提としている.しかし、通常の二輪走行時にセンサデバイスを4か所につけることは通常は想定できない. 文 献[15]で は , 動 的 計 画 法 を 用 い たDynamic Programming(DP ダ](https://thumb-ap.123doks.com/thumbv2/123deta/6461080.1633473/4.892.94.439.864.1121/ジェスチャスペースデバイスメニューセンサデバイスにつける.webp)
+2
関連したドキュメント
必要な食物を購入したり,寺院の現金を村民や他
原稿は A4 判 (ヨコ約 210mm,タテ約 297mm) の 用紙を用い,プリンターまたはタイプライターによって印 字したものを原則とする.
本アルゴリズムを、図 5.2.1 に示すメカニカルシールの各種故障モードを再現するために設 定した異常状態模擬試験に対して適用した結果、本書
収益認識会計基準等を適用したため、前連結会計年度の連結貸借対照表において、「流動資産」に表示してい
4) は上流境界においても対象領域の端点の
本市においては、良好な居住環境の保全を図るため、用途地域指定
図1に示す山口大学工学部所有の輪荷重走行試験機を用いて RC 床 版試験体を疲労損傷させ, RC 床版に設置した加速度センサの測定デー
入力用フォーム(調査票)を開くためには、登録した Gmail アドレスに届いたメールを受信 し、本文中の URL
