【論 文】 UDC :624
.
042.
7:620.
1 日本建築学会構造系論文報告 集 第 369 号・
昭 和 61 年 11 月パ ル ス
応
答解析
に
よ
る
1
質 点
系
の
地
震 応
答評価
一
Bi
−
linear
型
復
元力
特
性
完 全弾
塑性
型 と塑性 劣化型
につ い て一
正 会 員 正 会 員 正 会 員 正 会 員山
河
谷
藤
田
村
谷
明
秀
稔
*広
* *勲
* * *雄
* * * *1.
序弾塑 性 構 造 物の地 震応答評価は, 時 刻 歴 応 答 解 析に よ る場 合 が 多く
,
そ れ は,
個々の構造 物の特 定の地 震 波 形 に よる振 動特 性を知る ために有 効な手 段で あ る]) 。しか し, 時 刻 歴 応 答 解 析は確定 論 的であるとい う批判 か ら
,
ランダム振 動 論2}によ る応答評価が 行わ れ , また,
構造 物の吸 収エ ネル ギー
を応答評 価の指 標とする研 究も 多く行わ れ る よ うに なっ た3 〕−
5)。
そこ で,
筆 者ら は,
単純エ ネルギー
原 理で応 答 評 価の み な らず 損 傷 評 価にも結びつ け ることの できる,
極 限応 答解析を提示 し た6 ;−
8 )。 この極限応 答 解 析は,
選 択 極大 応答原 理に基づき,
構 造 物が与え ら れ た 入力の 中か ら 入 力エ ネル ギー
が最 大に な るよ う な 入力 を 選 択し応 答 する と し て, 応 答 解 析を行 う方 法であ る。
まず, 構 造 物の応 答をCyclic
(繰 り返 し)とMonotonic
(一
方 向 )の両 極 端のケー
ス に分け,Cyclic
な答 応に は有 限 共 振 応 答 解 析を,MonotQnic
な応 答にはパ ル ス応 答 解 析 (速 度 パ ル ス,
加 速 度パル ス)を適用す る。
本解 析 法では,
入 力は 地 動ス ペ ク トル特 性と継続時 間で与え られ9 ),
構 造 物の特性も地 動入力ス ペ ク トル と 同 じ座 標 上に描く こと で,
両者の相互 関 係か ら応 答量 を計算す ることができる。 し たがっ て,
人力と構 造 物の特 性が分離し て与え ら れ る こ と と,
数値 計算等に よ る解 析過 程のblack
box
化を防 ぐこ と が で き るの が特 徴で あ る。すで に
,
筆者ら の研 究室で は,
有限共 振 応 答 解 析に よ る履歴系の応 答 解 析7 }・
le )とパ ルス応 答 解 析の検 証 例川,
さ ら にパ ル ス応 答解 析によ る 剛体ロ ッキング振 動の解 析 例IX) を 発表 し た。
また,
極 限 応 答 解 析を,
地 域的な震 害 予測Blや震 害の確率 統 計 的 評 価14〕の ために も有 効な手 段 と して,
耐震性評価に も応 用を試み た。し か し
,
パ ル ス応 答 解 析に関す る 既報の研 究8 胆 1では,
本論 文 は,
文 献15)の内 容を骨 子と して ま と め たもの である。
申 神 戸 大 学 教 授・
工博 * * 神戸大学 助 教 授・
工博 i# 神戸大学 助 手・
工 修 * * * * 神 戸 大 学 大 学 院生・
工修 〔昭 和61年 3月 7日原 稿 受理 } 基本的な考え方 と解 析 結 果 を報 告し た が, その定量的な 考 察の結果,
解 析 手 法の物 理 的 意 味に検討の余地が あ る と考え られ たの で, 本 報で は以 下の 4点につ い て根本 的 な検 討 を 加え,
定 量 的に も近 似 性の高い パ ル ス応答解析 を提 示 するもの である。
(1 )1
正 弦パ ル ス 入力と矩 形パ ルス入力の 振 幅比 (2)’
矩 形パ ル ス入 力の継 続 時 間と,
入力ス ペ ク トル の横 軸の周 期との対 応 関係 (3 )速 度パ ル ス応 答 解 析の有効範囲 と 加 速 度パル ス 応 答 解 析の関 係 (4) パル ス応 答 解 析の初 期 条件ま た, 本報で は, 復 元 力 特 性 (完 全 弾 塑 性型
,
塑性 劣 化型)の応 答に与え る影 響 を考 察 して いるので,
と り あ えず 構 造 物の粘 性 減 衰 を無 視して いる。
さ らに,
解析結 果を定量的に検 討する た め に, 最 小二乗 法を用い て,
入 力と応 答に統 計 的な処 理 を行い,
解 析に精 度 上の検討を 加える。
2.
極限応答解 析
Bi.
linear
型 復 元 力特 性 (Fig.
2)を有す る1
質 点系振 動子 (Fig.
])は,
任 意の地 動入力を受け,
任意の応 答 を示す。
本 極限応 答 解 析TL8 ]で は
,
等 価 線 形 化の可 能な安定し たCyclic
な応 答 (Fig.
3)を有 限 共振応答解析で解 析 し,
非 線形性の強い 不 安 定な Monotonic な応 答 (Fig,
4 ) をパ ル ス応 答 解 析で解 析 する。 し た がっ て,
系の極 限 応 答 変 位は パ ル ス応 答 解 析によっ て得ら れ る。
以ドの と お り,
変 数を定 義す る。
m :質 量 (1−
n>h
:塑性岡ll性 (Fig.
2) x :基 礎か らの変 位f
(x):復元力 z 二地 動 変 位 2 :地 動 加 速 度 t:時刻 x。 :降 伏 変 位fy
:降 伏 耐 力 x、1;崩 壊 変 位 Te :弾 性 固 有 周 期 ω :固有Pl
振 動 数 Xa :変形 振 幅fa
:荷重 振 幅 Ac(x。
〉:履 歴 面 積 醜。:等 価剛性 丁。 。:等価 周 期 Xp :一
方 向 応 答 変 位一 48 一
h
:弾性 剛 性A
(x}:一
方向履 歴 面 積 Tc,
Tc :台 形 化 地 動入力ス ペ ク トル の折 点 周 期3.
パル ス の応答解析Monotonic
な応答 (Fig.
4)は,
速 度 あるいは加 速度 のパ ル ス入 力 (Fig.
5)に よっ て生じ る と考え ら れ る。 今, あるパ ルス入力 (Fig.
5)により,
系 がFig.
4
の点 P まで変 形し た と す る。 その パ ル ス入 力の速 度 (加 速 度〉 振 幅 をvN α p), 継 続 時 間 を tpとす る と, そ の一
方 向応 答 変 位 Xp に対 して, Vp(ap)と tpの組み合わ せは無 数に 存 在 する。 そこ で,
その 組み 合わ せ の 集 合 (Vp−
tp (a。−
t,〉関 係 )を4軸対数 座標に図 示し た もの を, 速 度 (加 速 度 )パル ス ス ペ ク トル と呼ぶ (Fig.
6)。
他 方,
地 動 入 力スペ ク トル (Fig.
7)は,
それぞ れの 地 震 動に固 有の もの で,
最大 地動 振 幅4 (加 速度 ),
Vmax (速 度),Dmax
(変位)と 2つ の折 点 周期Tc,
Tc
で構 成さ れ る台形 化スペ ク トル とする5)。
こ こ で,
パ ル ス入力の継 続 時 間 tp(Fig.
5)と地 動入力スペ ク トル の 周 期T
(Fig.7
)の間に適 当 な 関 係 を 与え る と,
Fig.
6 に示す よ うに,
速度 (加 速 度 )パ ル スス ペ ク トル と 地動 入 力ス ペ ク トル を 同 じ座標上に描 く こ と が で き る。こ こで, Xp よ り大きい
一
方 向 応 答 変 位 x尸、を仮 定す る と,
速 度 (加 速度 )パ ル ス スペ ク トル は,Fig.
6で速酷
m
f
{
x } 「{
1
−
n }k
k
鬯
XyOXy XBx一
fy
度 (加 速 度 〉の 増 加す る方 向へ 移 動する。
同時に, 与え ら れ た地 動入力ス ペ ク トル との共有点が存 在し な く な る。 これ は,
その地 動 入 力 を受けて も,
系の応答変位は 砺 に達し ない こと を意味す る。 逆に,
Xp より小さい一
方 向 応 答 変 位 Xn を仮 定す る と, 速度 (加 速 度 )パ ル ス ス ペク トルは,Fig.
6で速 度 (加 速度 )の減 少する方 向 へ 移 動する。
同 時に, 与え ら れ た 地動入力ス ペ ク トル の一
部が速 度 (加 速 度 )パ ルス スペ ク トル より上 方に存 在 す る。 これ は,
そ の地 動入力 を受け る と,
系は Xp2 よ り 大 きい変 形を強 制され る こと を意味 する。 し たがっ て, 速度 (加 速 度 )パ ル ス スペ ク トル が 地動入力ス ペ クトル と接し た とすると,
その とき仮定して い た一
方 向応 答 変 位 Xp が,
与え ら れ た地動入力に よ る応 答 変 位 とな る。
解 析で は, 矩 形パ ル ス入力につ い て Vp
− tp
(ap−
tp) 関 係 を 求 める。
ある応 答変位Xp を仮 定し た と き,一
つ の矩 形パ ル ス入力の速度振 幅 Vp (加 速 度 振 幅 α ,)に対 して 1つ の継続 時間tp
が確 定 的に計 算でき,
速度 (加bgV
速 度 速 度パ ル ススペ ク ト ルx卩
Xp1 (>Xp
)
Xp2(くXp
)Vp
−
tp
関 係 广一一一一一
!!
/
地 動入 力ス ペ ク トル 丶 丶 ! 丶驚
f
{x ) o四
7帋
tFig
,
1 1質点系振 動 子 Fig.
2 B重・
linear型復元力 特性f
【x}
foA
匸IXo
〕殴
q一
x α0
xαX
■
fo
Fig.
3 Cyclicな応答 V震
・・ 【OO
f
{x0
logV
・。、嗣
速 度log
tp
va
間L
・g
Tfi
b9
τd
。gT
周 期 (a )速 度パ ル ス ス ペ ク トル 加 速 度パ ル ス スペ ク トルXp1
〔
>X卩)X αP
−
tp
Xm (くXp
)
関 係 /弩
Fig.
4
Monotonicな応 答 TlI−
0
α偽
o
加 速 度 7− 『一一■
A 丶 ! 丶 !地 動入 力スペ ク トル \ 丶 、
f
卩t
時 間 十Pt 時 間 (a }速 度パ ル ス 入 力 (b)加 速 度パ ルス入 力 Fig.
5 パ ル ス入力togtp
時 間lOg
TG
logT
⊂[ogT 周朋 (b〕加 速度パルス ス ペ ク トル Fig
.
6 パ ル スス ペ ク トルbgV
速 度A
logTG
ヒngTi
⊂【〔胆T
周 期 Fig.
7 パ ル ス応 答 解 析地 動 入 力スペ ク トル一
49
一
速 度)パ ル ス スペ ク トル も即座に描 か れ る
。
とこ ろ が,
よ り実 状に近い パ ル ス入力とい えば, 正 弦パ ル ス入力が 考え られる。
しか し,
正弦パ ルス入力 を仮 定 する と,1
つ の vKap )に対 応す る tpを得る た めに は, 繰 り返 し計 算が 必要にな り, 1つ の速 度 (加速 度)パ ル ス スペ ク ト ル を描 くことも容 易では ない。
し た がっ て, 本 報では解 析を簡単にする ために
,
矩 形 パ ルス 入力に よる解 析 を 行 うが, 3−
1(1 )一
(3}に示す 適 用変換 則 を導い て正弦パ ル ス入力 を 仮 定した場 合と等 価な解析とな るよ うにす る。
3−
1 パ ルス 応 答 解 析の仮 定(1) 正弦パル ス入力と矩 形パ ル ス入力の振 幅 比
既 報8)
・
Ll)・
12}では , 速 度パ ル ス も加 速 度パ ル ス も, 正 弦 波と矩 形 波の 面積が等 しい場 合に等 価であ る と仮定して い たが,
速 度パ ル ス と加 速 度パ ル ス では,
系に与え るエ ネルギー
を支 配す る物 理 量 が異 なるの で,
個別に仮定 す る必 要が あ る と考え る。
そこ で,
矩 形パ ルス 入力と正 弦 パ ル ス入力の理 想的な状 態 (初 速 度 V。=
0 )で微 分 方 程 式 を 解い て得た, 矩 形パ ル ス入 力対正弦パ ルス入力の最 小 振 幅の比 の値 (文 献 15)の Table2,
hv,
ic
、 の値 ) も参 考に して,
次の よ うな考え方で,
新たに仮定 を行 う。
速 度パ ル スの場合, 速 度の変 化 量が系に与え る運 動 エ ネルギ
ー
を支配 してい る (cf.
式 (3
),
V
。+Vp)の で,
正 弦パ ル ス入力の最 大 振 幅と矩 形パ ル ス入力の振 幅が 等 しい もの を等 価と み な し,振 幅比hv
をkv
=
1(Fig.
8
(a)) と す る。
加速 度パ ル ス の場 合
,
加速 度による慣 性 力 (m α p)と,
それ による変 形 (x)の積(m αpx }が,
系に与え るエ ネル ギー
を 支 配 し て いる (cf.
式 (10))の で,
正弦パ ル ス 入力と矩 形パ ル ス入 力の面 積 が等しLiもの を等価と み な し,
振 幅M
ka
を,
h
・−
9
(Fi
・・
8
(b
})とする・(2) 矩 形パ ル ス入力の 継 続 時 間 と地 動 入 力スペ クト ル と の関 係
矩形パル ス入 力に よ るパ ル ス スペ クトル を地 動入力ス ペ ク トル と 同じ座 標に描く た めに は, 矩 形パ ル ス入力の 継続 時間
tF
と地 動入力スペ ク トル の横 軸の周 期T
の関 係を 仮 定す る必 要が あ る。enva
・・,
]1・,
・・1 で ・,
矩 形パ ・レ从 加弖
サ イ・ル の入 力で あ る と考え て,
tpを 2倍する こ と で周 期 T と整 合 させ て いた が,
これ は 入力 側か らの仮 定である。
そこ で,
VO
速 度一
Vp加 0(
凄
o
−
Ctp
一
葦
o〔p (a)速度パ ル ス 入 力 (b)加速 度パ ル ス入力 Fig.
8 矩 形パ ル ス入力と正 弦パ ル ス入 力一
50
一
矩 形パ ル ス入力に よる Vp−
tp(ap−
tp>関係の tpを2
倍 お よび4倍 し た パ ル ス ス ペ ク トルと,
正弦パ ル ス入力に よ る パル ス ス ペ ク トル を比 較し た結果 (文献15
)Figs.
9〜
20,Table
2,
tpと T の対 応 関係 )を参考に して,
次の よ うな考え方で,
新たに仮定 を 行 う。
継 続 時 間tp
の実 際の長さ は, 系が原点 を 通 過してか らMonotonic
な変 形を終 了す る まで の時 間に相 当 する。 ・ れ は1
サイ・ ル の応答で あ る・
・ た… て・
tpは 4 倍す ることで周 期T
と整 合さ れ,Fig.6
に示すよ うに,
パ ル ス スペ ク トル は地動入力ス ペ ク トル と同 じ座 標に図 示で きる と仮 定す る、 こ れ は,
パ ル ス スペ ク トル,
地動 入力スペ ク トル と もに,
応 答の観点か ら見た仮定である。(3) 速 度パル ス応 答 解 析の有効 範囲 と加 速 度パル ス
応
答
解 析の関 係Fig.
9
に,
矩 形 速 度パ ル ス によ るパ ル ス スペ ク トル と 正弦速 度パ ルス に よるパ ル ス ス ペ ク トルを 示す。
その概 形の相違 点は, 矩 形 速 度パ ル ス’
によ る 場合に下限 値 (直 線部分 )が存 在 することであ る。 ま た,Fig.
9
で は, 矩 形 速 度パ ル ス に よる パ ル ス ス ペク トルは,
その直線 部 分 だ け で地 動入力スペ ク トル と 接 してい る。
こ の と き,
両 者に よ る応 答結 果 を比 較す る。 矩 形 速 度パ ルス による一
方 向応答変位を x.と し,
正弦速度パ ルス に よる一
方 向 応 答変位をXs と すると, Xp>Xs であ る。
こ の結 果は,
矩 形 速 度パ ルスに よ る パル ス ス ペク トルが, その直線 部 分だけ で地 動 入 力ス ペ ク トル と接す る場合,
地 動入力ス ペ クトルの 周期特 性 (加 速 度一
定 領 域 )を 十 分に抽 出で きない で,矩
形速 度パル ス に よる一
方向応答変位x。 は 過 大 評 価とな pてい る こ と を示し て い る。
こ の とき,
矩 形 速 度パ ルス に よ るパ ル ス ス ペ ク トルの 曲線部分 と直線 部 分の境 界 点の継 続 時 間 をt
。 。とする と4
×tv
。〈T
, の 関 係が成立 す る。
また
,
Fig.
10に, 地 動入力スペ ク トル と速 度パ ル ス ス ペ ク トル お よび 加 速 度パル ス ス ペ ク トルの関 係の具 体 例 を 示 す。
以 後,
パル ス はすべ て矩 形パ ルス であ る。
Fig
.
10(a)は,
弾性固有周 期 Teが非 常に短い 場合の 例で,
速 度パ ル スろペ ク トル におい ては 4×t
。o〈Tc
とlogV
速 度Fig
.
9 正 弦 速 度パ ル ス と矩 形 速 度パ ルス によるパ ルス ス ペク ト ル の比 較V 速 度 LegV 速 崖
剛
蓬
編
謁
b・覧 ・・
炯
嗣
晶
(a ⊃弾 性 固 有 周 期Te の短い 栂 合(b)弾 性 固 有 周 期Te の 申間的な場 合
(c)弾 性 固 有 周 期Te の長い樋 合 Fig
.
10 地 動 入 力スペ ク トルと速度 (加 速 度1
パ ル ス ス ペ ク トル の 関係 なっ て,
前出の説 明よ り速 度パ ルス に よる応 答は過 大 評 価と な り無 効である。一
方, 加速度パ ル ス ス ペ ク トル は 地動入力ス ペ ク トル の加 速度一
定領 域 (短 周 期 領 域〉に 接 して い て,
加 速 度パル スは, 矩 形パ ル ス である ことの 問 題が生 じない の で, 有 効であ る。Fig,
10
(b
)は,
T
、の中 間的な場合の例で,
速 度パル ス, 加 速度パ ル ス と もに有 効で あ る が,
速度パ ル ス スペ ク トル は,
地 動 入 力スペ ク トルの速 度一
定 領 域 (中周期 領域 )に接してい る の で,
速 度パ ル ス の方が よ り有効 性 が高い と考えられる。
Fig
.
10(c)は,Te
の特に長い場 合の例で,
速度パ ル ス,
加 速 度パ ル ス ともに有効である が,
速 度パ ル ス スペ ク トル は,
地 動入力スペ ク トル の変 位一
定領域 (長 周 期 領 域 )に接し ている ので,
速度パ ル ス の方が よ り有効 性 が高い と考え ら れ る。
以上の点よ り
,
本 報の パ ルス応答 解 析に おい て は,
ま ず 速 度パ ル ス応 答解析を行い,
そ れ が有 効で あ ること を 確認す る。 有 効な場 合 (4× t。。≧T∂は,
速 度パ ル スによ る応答 変位 xv を 極限応答変 位 Xu と する。
速度パ ル ス が無 効な場 合 (4
×t
。。<Tc
)は,
加 速 度パル ス応答解 析を 行い,
加 速 度パル ス によ る応 答変位 xa を極限 応答 変 位 Xu と する。
(4) パ ル ス応 答 解 析の初 期 条 件系は
,
静 止し た状 態か ら突然,
極限応 答を 示 すの で は な く,
応 答の経 過 中にパ ル ス人力 を 受け てMonotonic
な極 限 応 答 をす る と考え ら れ る。 そこで,
系に初速度V
。を与えて パ ル ス応 答 解析を行う。
本報で は
,
予め有限共 振応 答解 析51 川 ゜】を 行い,その結 果の有限共振 振 幅 xa によっ て初速度V
。を 決 定す る。
そ こ で, 有限 共 振 応 答 解 析につ い ては,
Appendix に示 す。
有限 共 振 応答 解 析の結 果, 有限共 振振 幅 xa が弾 性 域 (Xa≦Xy)の と き
,
系が振 幅 x。で自 由 振動 して原 点 を 正 方 向に通 過す る と きの速 度 tUXaを初速 度V
。 とす る (Fig.
11(a))。
ま た,
有 限 共 振 振 幅 Xa が 塑 性 域 (Xa>Xv)の と き,
系が振 幅 xy で 自 由 振 動して 原 点 を 正 方向に通 過する とき の速 度 aAXy を初速度 V。 と する (Fig.
11(b
))。
3−
2 パル ス応 答 解 析の解析式パ ルス応答解 析では
,
パル ス スペ ク トル を求め ること,
つ ま りVp−
tp(α p−
tp)関係式を求 める ことが, 主な作 業と な る。(
1
)(単
一
)矩 形 速 度パ ルス入力を受け る場合 もヨ
Fig.
12に,
矩形 速度パ ル ス 入力と系の一
方向の横 カー
変位 (f
〔x)−
x )関 係 を示す。 次 式で与え ら れ る初期 条 件と極大応 答 条 件 を満た す Vp−
tp関 係 を求め る。
t−
o
・x− o,
審
一
v 。+ v。……・
………一
(1)t− t
・・x−
x・,
審
一
〇・
………・
………
(2) エ ネル ギー
の保 存 則より,0
≦x≦Xp,
0≦t≦tp
におい て次式が成 立 する。弖
・(… v・)…A
(x)・S
・(
dxdt
)
2・
一 ・
……
(・) た だ し,
f
{x )flx
}fy
f
ン 瑞 ζωx ・ノ
1 ▽』=ωXy !ヲ
一
Xy−
0x
αXyx層X
α一X
ンXyX
αx
一
fy
0
−
fy
(a) x。SXv の と き の Vo (b) Xe >Xv の と きの V 。 Fig.
11
初 速 度 v。f
(x0VO
一
Vp Fig.
12
矩 形 速 度パル ス 入力 と ノ(x }−
x 関 係log
Vp嚇
薊
一
val
−一
vp−
tp開係 {x=)IP
)
!ogtp
Fig.
13 速 度パル ス スペ ク トル一
51
一
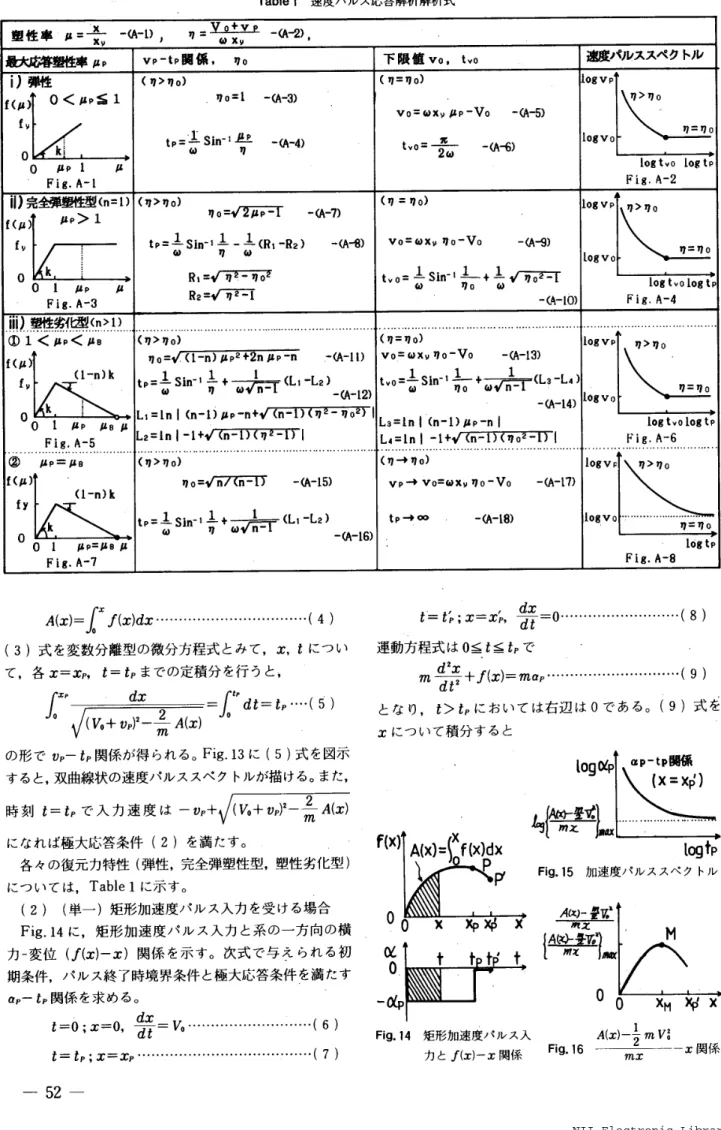
Table 1 速度パ ル ス応答 解 析 解析 式
.
瓢 弛一
(禽一
D 塑 性 率 μ3 翼り ,η=
ω xり
■
(《『
2)・
最大応繼 性率仰 VP一
い関 係,
η。 下 限 億 vo,
匙.
o 速度パルス ス ペク トルi
,難 (り〉”o } (η=
つo ) 10αVP f(μ )0
<μP≦1 ηo =1
−
(△一
劭 Vo3 ω 掬 μP−
Vo−
(八一
5) η〉ηo fり η=η0 い=
「
エs血一
泡.
ω ” π t》o=
【OεVOkl
2一
(《−
6) ω 00 μpl μ 且o区t.
o Logtp Fig.
A冒
1 Fig,
A−
2 尢 f(μ)ii
院 全弾 塑性型(n2D μP> 1 (η 〉 ηo) ”o=偏一
(八一
7) (つ=ηo ) 109VP η〉ηo t,ユ Siガ IL ⊥(R,−
R、}一
“適) Vo =ω恥 ηo冒
Vo−
(《−
9〕f
り ω ” ωLogvo
η=ηo k0 R 、=
岬t.。
.⊥
Sir
・
1
+⊥
y
万7
=τ ω η0 0 1 μP μ F19.
A−
3 R2=
研 τ ω一
(自一
ゆ 1。8t・
。L。客い Fi唇.
A−
4.
麺
i1
.
難 劣嶼.
1
輿 }.
.
1 く μP<畑 (η〉ηo ) (鞭;
ηo ) 且09VP η〉η0 f(μ} fり q−
n )k ηo=
(1−
n》 μP2 +2nμP噛
n.
一
(八一
11) …告
… 1÷
・詣
・Ll−
L・・一
。一
、2} Vo = ωxりηo■
Vq−
(A−
L3) …吉
S1・・1
。 ・論
r
・L・一
・・) η=
ηo k }‘
一
(A−
14〕Io区Vo L笛;
lnl (n−
1}μP−
n+ (n一
η一
ηol
00 1 μP μ8 μ L3=且nl (r1 )μP¶1
b区t・。logtp Fi8.
A−
5 L2=且nl−
1十 n騨
1,(η一
1
L4冨
L励1
−
1+ (n一
ηo−
1
Fig.
A−
6.
幽
.
L
μP留 μ8 (η〉ηo) (η→ ηo ) 109VF η〉ηo 正(ρ ηo=佩 「一
(△一
15) VP → Vo=
ωxりηD−
Vo−
(A−
17) (1¶ }k fy 且 t,.
⊥Sin−
・⊥+(L・
−
L ・) tp→ oo−
“−
L8) 且09VO「
9,
9
k ω 写 ω7F
丁一
”=ηo (A−
16) 0O l μP=μ臼μ logtp Fig.
A−
7 Fig.
A−
8A(・)
一
∬
∫馳一 一 ・
………・
・
…・
・
(・) (3)式を変数分離 型の微 分 方 程 式 とみて,
x,
tにっ い て,
各x=
Xp,
t
=tp
まで の定 積 分を行う と,
塩
。.龕
・A
,x、−
f
・ ”d
…=
tP””
(5
} 況 の形で v。− tp
関 係が得ら れ る。Fig.
13に (5)式を 図 示 すると,
双 曲 線 状の速度パル ス スペ ク トルが描 ける。ま た,
翩 ・ で 入力 臘 は一
・・+ 瞭 跏ア譫
醐 にな れば極大 応 答 条 件 (2)を満た す。
各々 の復 元 力 特 性 (弾性, 完全 弾 塑 性 型,
塑性 劣 化 型 ) につ い て は,
Tab 且e 1に示す。
(2}
(単
一
)矩 形 加速 度パ ル ス入力を受け る場合Fig.
14に, 矩 形 加 速 度パ ル ス入 力と系の一
方 向の横 カー
変位 げ(x)−
x >関 係を示す。 次式で与きられ る初 期 条 件,
パル ス終了時境 界 条件と極 大 応 答 条 件牽
満た す α p−
tp関係を求める。
t
−
b
・x− o
,{
弩
一v
・・
………・
・
…
(6>t=
tp
;ユ:=
コじP・
・
…
一・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
『
・
…
(7)
嫉 ・… 鈎
審
一
………・
…………・
・
…
(8
) 運 動 方 程 式は0≦t≦tp
で聯
・f
(・)−
map−
・
…・
一 …・
……・
・
(・) と な り,t
>tpに おい て は右 辺は0
で あ る。
(9)式を x につ い て積 分す る とf
(
xlA {・)・S
f
{・)d
・丶
戸
00
x
Xp 羅
x
鞠
tngtp
Fig.
15
加 速 度パ ル ス ス ペ ク トル ・・9.
14 矩 形 飃 度バ ・レス人A〔x)
−
em
・:力 と∫(エ)
一
躙 係Fig
・
16m 、c
.
・
.
一一
=関 係一
52
一
S
・(
dx
厩)
! +A
(x)−
m ・。x +・……・
……一
(1・) し た カ’ ・ て・
(’°)式は以 下の よ うになる・
硼 条 件 (、〉。,, 積 分 定 数C
を決定。 。.去
・(
貅
+醐一
m ・・x+S
・ ・:・
………
(12
)・t・
Sm
・:……・
…・
・
…………・
・
…・
・
・
・
………
(11) (12
>式を変嬲 離型の微 分 方 程 式 と見な し,
。,
,。つ Table2
加 速 度パル ス応答解析解析 式一
難 庫 μ・希
一
田一
D、
ξ・ 。寒
,一
餽 ),
u・
讒
:,
μ・ = n + 2 ) r−
6−
4},
率 μP’
パル ス終了塑 牲 率μP α 广 い閤係.
μp’
とμpの関係,
ξ0,
ξ乳,
(ξo ) 下 限 僵α 。,
t虞。 加 速 度パル ス スペク トル 正(μ) fり oi
弾 性0<μP’
≦1 μρ≦μPlk …
i
(ξ〉ξ0 )(μPくμP’
)ξ・
・
、夛
,・ ・… 2−
…一
《B−
5) …吉
・S1・S
・・一
… S・rl
≠
齢
S2=Sin−
1一__
_
1
僻 μ・= 耳 (μ・
’
2−
uaエー
ω一
7) (ξ=ξ・)(μP=
μρつ αo=ω2xレξo−
(B−
8) 1t 償o=一
(S5
+S4)一
(B−
9) ω… s…
論
ξ。 lo9αP 三〇9αQ ε)ξ。 ξ=ξ。 0 μPμPIK μ F薀9.
B−
1 S4=Sir1 柳 L。Et氓。10醒tp Fi8.
B−
2ii
)
自「
7F
.
7.
.
.
,
鹽
P.
.
.
.
.
.
1「
7F
鹽
1幽
鹽
鹽
■
■
■
L」
F」
■
■
」
,
μP’ >10
<μpく1ki
i
・… ξ1・量
・2… + Uり一
・一
・・ μ・手
「
「
−.
.
.
.
L」
.
」
」
L」
」
.
.
1「
「
「
1.
1F
層
FF
.
.
P,
1P
幽
.
幽
,
幽
1.
.
.
.
.
.
.
.
7.
■
■
1■
幽
.
.
.
」
L齟
.
.
L」
.
.
r
(ξ〉ξρ (μP 〈μPり…
器
・S・・S・・一
・一
・2・齟
’
L,
1「
「
.
−”
7.
F・
.
.
.
’
”
L.
’
齟
7’
層
1,
幽
幽
・
…
.
L齟
・
L「
.
.
、
r
.
−.
.
.
.
.
.
.
.
.
L齟
.
.
.
、
r、
−.
.
.
(ξOくξ≦ξ1)( μP くμρ
’
)一
(B−
1P.
.
7.
F.
,
F囓
.
.
.
.
.
.
.
.
.
.
.
.
.
,
1,
■
.
.
.
.
L
+ f(μ)f
り o f(μ) f” 0 μρ 1 μP’
μ Fig,
B−
3.
’
7’
F.
P.
囓
.
「
’
”
.
F■
.
層
P.
幽
.
鹽
・
L」
・
齟
,
・
μP卩
>1 1≦μP≦μ〆1「
1.
.
−.
.
L.
.
LlF
.
「
「
.
.
「
.
「
「
「
「
.
.
.
「
1.
F・
.
・
.
.
■
幽
−■
■
■
■
■
層
層
,
■
7.
P・
.
.
.
「
−
層
.
P幽
−−”
.
”
.
’
.
”
」
.
P
.
.
.
’
」
’
」
L.
L’
」
」
●
・
r・
…
r…
.
・
・
」
P.
.
、
L.
.
.
(ξ=
ξ0} (μP=μP,
) 曙o;
ω2麗り εo−
6−
15) 1 lo9αP lo8伽 ε〉ε11 ξ=ε1、
ξGくεくξ1 εo= ξ1 ξ富
ξD 0 i i r l kii
O 1μP μP’
μ Fig.
B−
4一
(B−
13) μP,
…岩
・S・+・ ・…
夛
一
・ (R・品辷
吁 1、) … s・一
・態
R3= 2(−
D μP+1← R4=
顳 ・…吉
・s・+s・・一
。 、ξ。.
D ・・一
(B−
i6) … Slr 1論
R5= 2 0−
1+U2 1。醒tα
010gtp Fig.
B−
5,
「
■
幽
.
P.
.
鹽
L.
L齟
層
」
rrrr
.
7層
.
F■
F,
.
F,
.
.
.
.
.
,
層
1<μP’
≦μ3 0<μP<呈 q−
n)k k i ;乙
:iiD
雛 抛 ・・ 〉・ ξ・号
・(1−
・… ’・・・…’
−
rU ・・一
・一
・η,
…争
一
・−
18・.
.
.
.
齟
.
.
.
.
F.
.
鹽
「
鹽
鹽
鹽
「
.
.
.
L.
L齟
齟
齟
LFPr
■
■
■
.
7rF
.
十 f(μ) fり」
」
「1
正(μ ) 「レ ゜ 0。,1 。,・
。、μ Fi醒,
B−
6.
「
.
.
齟
.
齟
.
.
.
」
「
「
「
.
「
.
■
■
■
幽
■
,
r.
.
.
.
.
.
1
<μP’
<μc 1≦μP≦μP’
.
.
P.
.
.
齟
.
.
,
.
11rL
」
,
.
r.
r.
r.
.
LL
.
」
齟
L」
.
.
「
1.
「
.
.
.
1.
PF
.
「
.
.
F.
.
.
.
.
.
,
「
「
7P
層
■
鹽
■
.
.
L
(ξ〉ξ1〕(μP〈μP’
) t, ・⊥(S,+S,).一
儡.
19) ω.
.
’
,
’
1.
.
鹽
1幽
’
.
’
齟
」
」
齟
」
.
1「
「
.
’
’
”
」
.
”
L,
r・
…
r
…
.
−,
F.
.
、
r
.
.
.
.
.
.
,
層
.
層
F.
.
.
LL
(ξ0 くε≦ξρ (μP くμP「) …吉
・S・・・… 万斎
・L・−
L・・一
(B一
λ)) L5=lnl(n呷
D μP 十ξ一
轟 ←R61」
L.
L.
」
.
「
1「
.
rr
.
.
.
.
r.
.
.
.
.
.
.
・
」
P.
.
L齟
,
LL
」
.
r「
.
r.
.
1.
.
F.
層
P幽
.
.
.
−r1
−.
.
.
.
.
」
」
L.
「
.
」
」
」
.
.
「
1.
.
.
F層
.
幽
.
・
幽
1■
鹽
−鹽
r「
■
■
.
■
F,
F.
.
P幽
.
1.
.
,
幽
.
」
齟
.
齟
L
(ε=ξo)(μP=μPりξ。・
f
÷一
侶一
2D μP αo=ω2罵りξo−
(B−
22〕 1 星 ξ〉ξ1 、 ξ=ε1 ξo 〈ξ〈ξ1 ε=
ξo (1−
n )k … k l i.
;
t醒・ (S・+S・冫+ 。ぜ肩一
(L・’
L・) 《B−
23) Lτ=hl (n−
D μP’
+書。¶1
109αP 且09 αo.
.
10唇αP ko唇αo 且。齢 1。目 い Fig,
B−8
.
11
■
.
−■
■
■
■
L」
−,
1幽
rr
■
●
■
■
■
−■
■
■
L」
■
層
1●
幽
■
鹽
L
十 00 1μPμP’
μc μaμ Flg.
B−
7.
,
7.
「
PPP
.
.
.
齟
齟
.
齟
「
.
−r「
■
■
1層
.
FF1
,
r−.
.
.
.
.
μc≦μP’
≦μB 1≦μPくμゲ L・;
lnl ξ一
且+R,r
R5 ザ + 2 }i
K μ) fり (1「 )k kl
.
.
= (n−
D {(n−
D μP 〜+2( ¶ )μρ+n+U2} R7=
(n−
D (一
1十 ) L8=
i
ξo−
【+ n呷
L.
.
.
」
,
.
層
幽
.
11
,
.
.
.
.
.
.
LL
.
」
L
1「
−.
.
.
LL
.
.
.
.
.
」
L.
.
.
「
1.
LL
.
..
1
(.
ξ→ ξo) (μP→ μP’
) εo=r 而 可 碑一
6−
2の αP→ αo= ω2躍り
ξo−
(B−
25) tp → oo−
(B−
26) ξ〉ξ1 1 ε冨ξ■ 、.
軸
ξ・〈ξ〈ξ1.
.
「
.
.
.
L.
L」
L,
「
.
11
.
7.
.
■
,
■
■
鹽
■
■
P■
鹽
ξ=ξo 001 μρμcμP’
μBμ Fi8.
B−
9 lo霧tp Fi8.
B−
to一
53
一
いて各 x = Xp ,
t
=tp
まで の定 積 分を行う と,
砲
_籖
闘一
∬
齢 糀……一 …・
……・
・
一 ……・
…
(13 ) の形で,
ap−
tp
関係が え ら れ る。
ただし , Xp は, (12> 式 をτ壽
轟 まで定積分す ること よ り,
Xp
.
欄一
;
・ ・1
…..
.
.
._ _ .
.
...
(14> m α P で与え ら れ る。
(13> 式 を 図 示 すれ ばFig.15
の よ う な 双 曲 線 状の加速度パ ル ス スペ ク トルが描か れ る。
し か し 加速度パ ルス入力継続時 間 中に,
系の 応 答が停 止また は“
A
(x)−
5
mv
; 逆 転し ない た めの条 件は・
Fig・
16
で一
m 、c−
xA
(・)一
劫
y
‘ 関 係が 与え られ る と き,
が,
x に対し て mx 単 調 増 加であ ること で ある。
し たがっ て,
α p は,Fig.
16
。極 大点M .
。 , ,{
醺
・ γ訥
小,。。 に は な らない の で,
この値が,Fig.
15の加 速度パ ル ス ス ペ ク トルの下限値 を与え ることになる。 各々 の復元力 特 性 (弾 性,
完 全 弾 塑 性t 塑 性 劣化型) につ い ては,Table
2に示す。
4.
数値計 算 次の 3 種の地震動につ い て数値 計算を行っ た。
(1
) ElCentro
1940,
NS,
Max.
Acc.=
=
342
(cm /s2>,14.
98
(s)161 (2 )Taft
1952,
NS ,
Max.
Acc,=
153 (cm /s2),14,
98
(s)16) (3
) Hachinohe1968,
NS ,
Max .
.
Acc.=248
(cm /s2),39.
98
(s)17} 4−
1 地動入力ス ペ ク トル 有限 共 振 応 答 解 析 に.
用 い る地 動入力ス ペ ク トル (Fig.
19
),
パ ル ス応 答 解 析に用い る地 動入力ス ペ ク ト ル (Fig.
20 )は, それ ぞれ減 衰 定 数 h=
o.
473T
}お よ びh =0,
21B
)の 変 位応 答ス ペ ク トル か ら変換した擬 似 速 度 応答ス ペ ク トル19 )(刻み時間 はO.
02 (s)) を 台 形 化し たもの で あ る5i。 台形化ス ペ ク トル は, 応 答スペ ク トル を対 数 軸上で最小二 乗法を用い て, 速 度一
定 値 (Va
.。 or Vmax)と折 点周期 (T。
andT
、)の 3個の推 定 値 を決 定 し て得ら れ る。 ま た,
ばらつ きの指標と しての標 準 偏 差 σ は,
自由度を3
と し て次 式で与え ら れ る。
Table 3 解 析パラ メー
ター
とFig.
No.
塑牲剛性q−
n)k 完全弾塑性型(n=
Lo ) 塑性劣化型(n=
L2 ) 復 元 力特 性降 伏 震度 晦 Ky
=
0,
5Ky =0.
2Ky =0.
5Ky =0.
2EL C6ntroFig
,
21ω Fi魍.
21(d}F且9.
22(a)Fi8.
22(d)入 力 地 震 動 Taft Fi8
.
21 (b)Fi区.
21(8 )Fi8,
22(b)Fi8.
22(e)HachinohoFi8
.
21(c}Fig.
21(正)Fi8.
22(c〕Fig.
22(1) 有 限 共振 応 答 解 析 共搬 振 幅Xu
YS Xα≦Xy NO マ6
=ωXy
V
』=ωxα パ ル ス 応 答 解 折 速 度パ ル スxり 輪 加 速 度パ ル ス
X
譜α。 YES4
対が τ NOXu = Xv Xu =xα 極 限 応 答変 位 為 Fig.
17 極 限 応 答 解 析フ ロー
チャー
ト「
5
1
時 刻歴 最大 応 答変 位 Xm一
一
一
一
一
一
一
一
粘 弾 性 応 答 ス ペ ク ト ルも
平均 化E
折 れ 線 化 時 刻 歴 最大応 答 変位[
ー
L
「
φ
〔
1
比 較・
考 察1
極 限 応 答変 位B
. _
_
」
「
う
台 形化 地 動入 力 ス ペ ク トル 平均化L
_
_
_
_
_
_
_
_
_
」
Fig.
18 入力と 応 答の評 価 法一 54 一
・
一
纛 象
α・gv
厂1
・9 vr)・”・
・
一
…
(15 >N
:横軸 (周期 )の ポイン ト数 Vi:も との応答ス ペ ク トル の各 周 期の速 度の値 vぎ:台形化ス ペ ク トル の 各 周 期の速 度の値4−2
計 算結 果計 算結果 は
,
降 伏震 度K
。 (=
fy
/mg )と塑 性 剛 性 (1−
n)h をパ ラメー
タ と し て示す (Table 3)。 Figs.
21,
22に, 有 限 共 振 応 答 振幅Xa,
速度パ ル ス によ る応 答 変 位 x。
,
加 速 度パ ル ス に よ る 応 答変 位Xa,
極 限応 答 変 位 Xu お よ び時 刻 歴最大 応答変 位Xrcを示 す (Tab14 )。 た だ し,
時 刻 歴 応 答 解 析は,
筆者らの提唱す る区 間 線 形 解 法2°) (刻み時間 は 0.
02 (sD で 行 っ た。
極 限 応 答 変 位 Xu は,
Fig.
17に示す極限 応答 解析フ ロー
チ ャー
トに 従っ て決 定され る。 ま た, 時 刻 歴 最 大 応 答 変 位πm を対 数 軸 上で最 小二乗法 を 用い て, 折れ線に近 似し た。 ば ら つ きの指 標 として の標準偏差 a は,
推 定 値が 3個 (cf.
Fig.21
(a)),
傾き α,
折れ点の周 期T
,, 長 周期領域に お け る応答変位一
定 値 Xb )あるの で,次 式で与え ら れ る。
・
一
。≡
、嵩
G
・9
・x・− 1
・9
・x.
n2
,
・
・
………
(16
)N
:横軸 (周期 )のポイン ト数 Xt :近似さ れ た最 大 応 答 変 位 Xmi :時 刻 歴 最 大 応 答 変 位 また,Fig.18
に 入力と応 答 評 価の概 念 図 を示す。
5.
考 察 (1 ) 地動入力ス ペ ク トルとパ ル ス スペ ク トル弾 性固有周期
T
。が 短 く な る と,
時 刻 歴最大 応答変位 Table 4 記号区分 o 有 限共 撮 振 幅 XG 口 速 度パ ル ス 応 答 変 位 Xv ロ :有餌
4t・。>T・) 回 :無効(4t 四 く G} △ 加 速 度パ ル ス応 答 変 位 X ¢ 。 、採。当
・ … 圃 4 :不 採 用 一 極 限 応 答 変 位 Xu き←■ :崩 壌 変 位 XB に達 した ● 時 刻 歴 最大 応 答 変 位 Xm ↑;崩 製 変 位 XB に達 した v
貯
に 速 度 10 5 O、
1 v 50 速 度 に 105 o.
41
.
03
.
oT
{s )o
.
10
.
]51
.
os
.
oT‘s)D
.
1 (a )E且Centro 周 期 周期 (b
)Taft
Fig.
19 有限共 振応 答解 析の地動入カス ペ ク トル 0.
45 1.
O (c )Hachinohe 4.
oTCs
) 周 期 O.
1 0.
55 1,
0 2.
5 (a〕El Cent 「o V 咄 50 速 度 に 105 Vl 匸哦150
速 度 10 5T
〔・}。
、
1。
.
51、
。コ
.
o τ〔・1
0」 周 期 周 期 (b)Taft Fig
.
20 パ ル ス応 答 解析の地 動入カス ペ ク トル 0.
ら5 1、
O (C )Hachinohe 3.
5Tts } 周期一
55
一
Xm と同 様に
,
極 限 応 答 変 位 Xu も小さ く な る傾 向を示す (Figs.
21,
’
22)。 これ を 地動入力ス ペ ク トル とパ ル ス スペ ク トルの 関 係か ら考 察 する。Te
の 長い領 域では,
速 度パ ル ス に よっ て決 定さ れ た 極 限 応 答 変 位 Xu は一
定で あ る。
こ の と きは,
速度パ ル ス ス ペ クトル は地 動入力ス ペ クトル の変 位一
定 領 域に接 して い て,T
。 が 短 く な る と,
そ の接点は変位一
定領域 に沿っ て左 上方へ 移 動して行く (Fig.
lo(c))。
Te
の中 間 領 域では,
T
。が短く な る に従っ て,
速度パ ル ス によっ て決定さ れ たXu は小さ く な る。 この と き,
速 度パ ル ス ス ペク トルは 地 動 入 力スペ ク トル の速度一
定 領 域に接して い て,Te
が短く な る と,
その接 触 部 分は 速 度一
定 領 域に沿っ て左方 向に移 動して行く が,
これ は 変 位 成 分の減 少する方 向である (Fig.
10(b))。
Te
の短い領域で は,
地動入力ス ペ ク トル の変位 成 分 はい っ そ う小さ く なっ て いるのに,
速度パ ルス によ る応 答変位 Xv は あ ま り小さ く な ら ない 。 これ は,
速 度パ ル スス ペ ク トルが地動入力スペ ク トル と下 限値 (直線部 分) だ けで接 して い て (Fig.9,
10(a)),
地動入 力ス ペ ク ト ルの周期特性 (加速度一
定領域 〉を応答に反映す ること が で き ないか ら で あ る。
こ の場合は,
加 速度パルスに よ る 応 答変位 Xa を 極 限 応 答変位 Xu と してい る (cf.
3−
1 (3
),Fig.
17 )。
」
逆に,
加 速 度パル ス スペ ク ト・
ルは地 動入力スペ ク トル の加 速 度一
定 領 域に接す るの で,Te
の長 い領 域で は地 動入力ス ペ ク トルの周期特性 (変位一
定領域 )を応答結 果に反 映で.
き ない (Fig.
10
(c))。
(2
) 入力と応答の評価法 (Fig.
18
)と 入力の評 価 耐 oX に 10 応 答 変 位 10 1o.
1 1。。)暫 10)9
)暫 4凸 6 4tり
0 <TG 4tvo>TG 煙 彑 ユ9一
矼__
昏 『 Xb∠
∠
__
皇●_ 一
σ 。%
須
∠ 口 σ = 0,
127 Tbz7
7
E
且Centro 完 金 弾 塑性型 n二 且.
OKy=
0,
5 O・
11 弾 性周 期 10
昌
’
(a )Ky=
O.
5,
EI Centro x柵
応 答 変 位10
1O.
1 x刪
応 答 変 位 10 1 0.
1 x刪
応 答 変 位 10 1 O、
1 O.
1 1 弾 性 關 1嘔
(b)Ky=0,
5 凾 Ta正t 100)呼 10Xy )勉 4t.oくτ6 06 4tvo>TG o窰
_
4
・ 蟹一
一一
_
2__
.
一幽
一.
一.
一.
・
σ∠
∠ 囗 σ幕 0.
109 ∠『
〃7
∠7
Ta正t 完全弾 塑性型 n=
LOKy≡
0.
2 ゜湘1 弾 欄 期 1
囓
品
X 姪1 応 答 変 位 −o 1 O,
1 X 悩 応 答 変 位 10 1 0.
1 ゜A1 弾 性 醐 1
鳴
(d}Ky=
0.
2, E凪 Centro (e)Ky=0,
2置
τaft Fig.
21 完 全 弾 塑 性 型 復 元 力特 性の場合の 応 答 解 析 結 果 ゜・
11 弾 欄 期 1
嘔
(c)Ky=O.
5,
HacbinΦhe ゜・
11 難 醐 1
囓
(f)KyFO・
2,
Hachiりohe