日 本 ロ ボ ッ ト学 会 誌Vol.24 No.6, pp.727∼734, 2006 727
学 術 ・技 術 論 文
注 視 に よ る2足 歩 行 ロボ ッ トの歩 行 動作 の 安定 化
滝
澤
象
太*牛
田
俊*出
口
光 一 郎*
Motion
Stabilization
of Biped
Robot
by Gaze
Control
Shota
Takizawa*.
Shun Ushida*
and Koichiro
Deguchi*
We present a motion stabilization
system for a biped robot that makes it possible to keep relative posture and
position to a moving or stationary
object.
Our system consists of two layers of control subsystems, gaze control
system and motion control system. In order to achieve an actual motion which follows exactly a scheduled one, the
biped robot gazes a target to estimate errors of robot motion and adjusts both an actual motion and the scheduled
one simultaneously.
The gaze control system has 2 DOF controller, visual feedback part and feedforward part based
on a scheduled robot motion. A periodic motion of robot body swing induced by walking allows us to estimate the
distance to the target by forming a motion stereo. The scheduled motion is adjusted based on an adaptive law of
Model Reference Adaptive Control (MRAC).
Key Words: Gaze Control, 2 DOF Control System, Motion Stabilization, Biped Robot, MRAC
1.は じ め に 1.12足 歩 行 ロ ボ ッ トに お け る視 覚 機 能 ロ ボ ッ トに 搭 載 さ れ た 視 覚 は,外 部 に 設 け た 基 準 に 対 す る ロ ボ ッ トの相 対 的 な位 置 姿 勢 を 計 測 す る こ とが で き,ロ ボ ッ トの 運 動 制 御 に不 可 欠 な “実 環境 に お け る ロ ボ ッ トの実 際 の動 作 簡 に 関 す る 情 報 を与 え て くれ る セ ンサ で あ る.た だ し ロ ボ ッ トの 研 究 に お い て は,視 覚 は 動 作 計 画 や 障 害 物 検 出 な ど の 高 度 な タ ス ク に盛 ん に 利 用 さ れ て い る一 方 で,動 作 制 御 や バ ラ ン ス 制 御 の よ う な 基 本 的 な 制 御 に は ほ とん ど利 用 さ れ て い な い.い くつ か の 歩 行 ロ ボ ッ トの 研 究 で は 視 覚 を 動 作 計 画 や 動 作 制 御 に利 用 し て い る が,そ こ で の 利 用 法 は 単 純 な 視 覚 フ ィー ドバ ッ クや ス テ レ オ視 に よ る 三 次 元 計 測 な ど に 限 定 され て い る[1]∼[4].し か し, 人 の 視 覚 機 能 を 実 験 的 に 調 べ る 研 究[5]∼[8]に よ っ て,人 の 視 覚 機 能 と運 動 制 御 の か か わ りが 解 明 さ れ つ つ あ り,人 や 動 物 な ど の 生 物 が もつ 運 動 制 御 機 構 に お い て は,視 覚 が 動 作 制 御 に お い て 重 要 な 役 目 を 果 た し て い る こ とが 明 らか に な っ て き た.こ れ らの 生 物 が もつ 運 動 制 御 機 構 と 同 様 に,ロ ボ ッ トの 運 動 制 御 機 能 を 高 め る た め に は 視 覚 を運動 制 御 に 積 極 的 に 利 用 す べ きで あ る と考 え られ る.こ の 視 覚 を 用 い た 動 作 計 画,動 作 制 御,バ ラ ンス 制 御 とい っ た 種 々 の 運 動 制 御 を 「ロボ ッ ト動 作 の 安 定 化 」 と呼 び,そ の 運 動 制 御 系 の 仕 組 み を 明 ら か に し た い と い う の が 我 々 の 研 究 の 動 機 で あ る. 2足 歩 行 ロ ボ ッ トが 動 作 を 行 う場 合,(a)ロ ボ ッ ト と ロ ボ ッ トの 活 動 す る 環 境 の 全 体 を モ デ ル 化 し,(b)モ デ ル に 基 づ い て ロ ボ ッ トの 動 作 を計 画 し,(c)様 々 な セ ンサ を 用 い た運 動 制 御 に よ っ て計 画 され た 動 作 を 実 現 す る と い っ た 手 川頁を 踏 む.こ こ で は,こ の 計 画 さ れ た 動 作 を 「予 定 動 作 」 と呼 ぶ.予 定 動 作 の 具 体 例 と し て は,歩 行 し な が ら カ メ ラ を搭 載 した 首 を振 る注 視 制 御 系 で は,歩 行 時 の 上 体 の 揺 れ の 周 期 か ら計 算 され る 理 想 的 な 首 振 り角 度 と な る.も しロ ボ ッ トが 床 の す べ り等 の 不 確 実 な 振 舞 い を す る こ と な く予 定 動 作 通 りに 制 御 さ れ た と き,完 全 な 注 視 制 御 が 達 成 さ れ,歩 行 時 に も カ メ ラ が と ら え た 対 象 物 は 画 像 の 中 心 で 静 止 す る. 動 作 の 計 画 法 に 関 す る 研 究 は,数 多 く行 わ れ て い る.例 え ば, 人 の モ ー シ ョ ンキ ャ プ チ ャデ ー タ を元 に し た動 作 の 計 画 法[9]や 視 覚 を 用 い た 強 化 学 習 に よ る動 作 の 獲 得[10],能 動 視 覚 を 用 い た 三 次 元 環 境 モ デ ル の 同 定[11]な ど が あ る. ま た,2足 歩 行 ロ ボ ッ トの 運 動 制 御 法 に 関 し て も 多 くの 研 究 が 行 わ れ て い る.例 え ば,バ ラ ン ス の 維 持 を支 持 脚 で 発 生 す る モ ー メ ン トを一 定 範 囲 に 保 持 しつ つ,目 的 の 姿 勢 に 近 い 姿 勢 を 見 出 す 最 適 化 問 題 を解 く手 法[12]や2足 歩 行 ロ ボ ッ トの 全 運 動 量 を 陽 に与 え,こ れ ら を 満 足 す る よ う に関 節 を駆 動 す る 分 解 運 動 量 制 御[13]な ど が 挙 げ ら れ る. 2足 歩 行 ロ ボ ッ トが 計 画 され た動 作 を実 際 に行 うた め に は,ロ ボ ッ トや 環 境 の振 る 舞 い を表 す モ デ ル が,実 際 の ロ ボ ッ トや 環 境 に 正 確 に 一 致 す る 必 要 が あ る.な ぜ な ら,2足 歩 行 ロ ボ ッ トの 歩 行 動 作 は そ れ 自体 が 不 安 定 な動 作 で あ り,モ デ ル の 誤 差 が 予 定 動 作 と の 大 きな ず れ に な っ て 現 れ る た め で あ る.し か し,歩 行 ロ ボ ッ トや 動 作 環 境 は 複 雑 か つ 時 変 な シ ス テ ム で あ り,そ の 振 る 舞 い を モ デ ル 化 す る こ と 自体 が 難 し く,使 用 す る モ デ ル に 原 稿 受 付2005年4月14日 *東 北 大 学 大 学 院 情 報 科 学 研 究 科 * G
raduate School of Information Sciences, TOHOKU University
728 滝 澤 象 太 牛 田 俊 出 口 光一郎
Fig.1 Basic scheme of vision-based motion stabilization
は あ る 程 度 の 不 確 か さ が 伴 う.こ の よ う に あ る 程 度 の 不 確 か さ を 含 む モ デ ル に よ っ て 計 画 さ れ た予 定 動 作 を 実 際 に2足 歩 行 ロ ボ ッ トに行 わせ る場 合,ロ ボ ッ トの もつ 動 作 制 御 系 は,セ ンサ か ら得 ら れ た実 際 の ロ ボ ッ トの 状 態 を 基 に,実 際 の 状 況 に 合 う よ う動 作 中 に そ の 予 定 動 作 を 修 正 す る 機 能 を も っ て い な け れ ば な ら な い. 我 々 は,こ の 予 定 動 作 の オ ン ラ イ ン修 正 の た め の セ ンサ と し て,視 覚 を 利 用 す る.:Fig.1に,我 々 の 提 案 す る 視 覚 を用 い た 予 定 動 作 の オ ン ラ イ ン 修 正 の 基 本 的 な 考 え 方 を示 す.提 案 す る 制 御 系 で は,ロ ボ ッ トは あ る 対 象 を注 視 す る こ と に よ っ て,外 部 に 設 け た 動 作 の 基 準 に 対 す る実 際 の 動 作 を注 視 機 構 の カ メ ラ の 首 振 り量 と い う形 で 知 る こ と が で き る.ま た,ロ ボ ッ トは 実 際 の 首 振 り量 と予 定 動 作 を行 っ た 場 合 の 首 振 り量 を 比 較 す る こ とで,自 身 の 動 作 の ず れ を推 定 す る.こ の 動 作 の ず れ の 推 定 値 を用 い て,予 定 動 作 が 実 現 さ れ る よ う に 実 際 の 動 作 を 制 御 し, 同 時 に 予 定 動 作 を 修 正 す る.こ の よ う な,モ デ ル と実 際 の 制 御 対 象 が 一 致 す る よ う に モ デ ル パ ラ メ ー タ を 修 正 す る制 御 手 法 は, モ デ ル 規 範 型 適 応 制 御(Model Reference Adaptive Control) と して 定 式 化 され,制 御 系 の 安 定 性 や パ ラ メ ー タ の 修 正 則(適 応 則)に つ い て 多 くの 研 究[14][15]が な され て い る. 本 論 文 で は,以 上 の 制 御 の 考 え 方 に 基 づ い た 視 覚 を 用 い た 動 作 制 御 と し て,ロ ボ ッ トが 外 部 に 設 け た 基 準 に 対 す る 自身 の 移 動 量 や 進 行 方 向 の ず れ を視 覚 を 通 して 計 測 し,状 況 に 合 わ せ て 動 作 を修 正 す る こ とで 目的 の 動 作 を実 現 す る動 作 安 定 化 制 御 系 の 設 計 を 行 う.提 案 す る 動 作 安 定 化 制 御 系 で は,ロ ボ ッ トの 頭 部 に 取 り付 け ら れ た 注 視 機 構 を 用 い て 注 視 を常 に行 い,カ メ ラ の 首 振 り量 か ら動 作 の ず れ を推 定 し動 作 と予 定 動 作 を 修 正 す る. 本 論 文 の 構 成 は 以 下 の 通 りで あ る.2章 で 注 視 制 御 系 の 定 式 化 を 行 い,3章 で 視 覚 を用 い た ロ ボ ッ トが 外 部 に設 け た 基 準 に 対 す る 自 身 の 移 動 量 や 進 行 方 向 の ず れ の 推 定 法 と,状 況 に 合 わ せ た実 際 の動 作 と予 定 動 作 の 修 正 法 を 示 し,4章,5章 で そ の 有 効 性 を シ ミュ レ ー シ ョ ン お よ び 実 機 に よ る 実 験 に よ っ て 示 す. 2.注 視 制 御 の 定 式 化 視 覚 を 注 視 制 御 に 用 い る 場 合,注 視 機 構 の もつ 機 械 的 な 遅 れ に加 え て 画 像 処 理 に よ る遅 れ に よ っ て 発 生 す る 大 き な む だ 時 間
Fig.2(a)
Relationship between the target
and the biped robot
and(b)the offset
distance between the camera rotation
axis and the instantaneous center of the robot rotation
Fig.3 Definition of parameters
と,画 像 の サ ン プ リ ン グ周 期 が 注 視 機 構 の 制 御 周 期 に比 べ て 大 きい た め マ ル チ レー ト制 御 と な る こ と を 考 慮 す る必 要 が あ る. 藤 本 ら[17]は,制 御 対 象 の 厳 密 な モ デ ル を構 築 し,オ ブ ザ ー バ を 用 い て 遅 れ を 補 償 しサ ン プ ル 点 間 に お い て も追 従 を保 障 す る ビ ジ ュ ア ル サ ー ボ の 制 御 手 法 を提 案 して い る.ま た,高 い 制 御 周 波 数 を活 か す た め に フ ィー ドフ ォ ワ ー ド制 御 を用 い た 注 視 制 御 系[18]∼[20]が 提 案 され て い る が,こ れ らは む だ 時 間 を補 償 して い な い. 我 々 は視 覚 フ ィー ドバ ッ ク制 御 に 加 え,事 前 に 分 か る ロ ボ ッ トの 動 作 情 報(予 定 動 作)を 用 い て む だ 時 間 を 補 償 し,幾 何 学 的 関 係 か ら首 振 り角 速 度 を計 算 す る フ ィー ドフ ォ ワ ー ド制 御 器 を 用 い た 注 視 制 御 を提 案 した[21].本 章 で は,動 作 安 定 化 制 御 の 基 礎 と な る注 視 制 御 系[21]に つ い て 説 明 す る. 2.1状 況 設 定 お よ び 変 数 の 定 義 Fig.2(a)に ロボ ッ トの 頭 部 に 取 り付 け られ た カ メ ラ,ロ ボ ッ トの 胴 体,注 視 対 象 の 関 係 を示 す.こ こ で は,Fig.2(a)に 示 す よ う な 平 面 上 を 動 く注 視 対 象 を ロ ボ ッ トが 移 動 し な が ら注 視 す る 状 況 を考 え る. 以 下 の 議 論 で は,次 の こ と を仮 定 す る.(1)ロ ボ ッ トお よ び 注 視 対 象 は 同 一 の 水 平 面 内 を 移 動 す る.(2)カ メ ラ は 垂 直 方 向 の 回 転 軸 の み を も つ.(3)ロ ボ ッ トは カ メ ラ の 回 転 と は 無 関係 に 運 動 す る.(4)注 視 対 象 は 水 平 面 内 を 自 由 運 動 す る.(5)ロ ボ ッ トか ら対 象 ま で の 距 離Dtは 十 分 に 大 きい. ま た,Fig.2(b)は ロ ボ ッ トと カ メ ラ の 関 係 を模 式 的 に 表 した もの で あ る.カ メ ラ と ロ ボ ッ トは 回 転 関 節 を 介 し て接 続 さ れ て お り,カ メ ラ の 回 転 軸 と ロ ボ ッ トの 回 転 軸 に は オ フ セ ッ ト ムx, △yが あ る(Fig.2(b)).注 視 対 象 との 距 離Dtに 対 し て オ フ セ ッ ト△xお よ び △yが 小 さ い た め △x=0,△y=0と 近 似 す る †. 注 視 対 象 に 固定 した 座 標 系(ロ ボ ッ ト座 標 系)を 考 え る.ロ ボ ッ ト座 標 系 で は,注 視 対 象 は常 に 原 点 上 に 静 止 し て い る.:Fig.3 に 示 す よ う に,各 変 数 を 定 義 す る. †仮 定(5)が 成 り立 た ない 場 合 は,オ フ セ ッ ト △x,△yが 画 像 と三次 元 空 間 内 の 対 応 付 け に影 響 を及 ぼ す と考 え られ る が,オ フ セ ッ トを 陽 に扱 う こ と は可 能 で あ る.本 論 文 で は,こ の よ う な 複 雑 な 現 象 は 扱 わ な い.
注視 による2足 歩行 ロボ ッ トの歩行動作 の安定 化 729 [xt,zt]T:時 刻tで の ロ ボ ッ トの 位 置 rt:時 刻tで の ロ ボ ッ トの 姿 勢 の 回 転 角 [xobj,zobj]T:注 視 対 象 の 位 置(原 点) θt:カ メ ラ の 首 振 り角 度 at:注 視 対 象 と カ メ ラ の 視 線 と の な す 角 度 Dt:注 視 対 象 と ロ ボ ッ トの 距 離 βf:注 視 対 象 と ロ ボ ッ トの な す 角 度
目標 角 度 を αoと す る と,時 刻tに お い てat.二 αoが 成 り立 つ 状 態,つ ま り動 作 中 注 視 対 象 が 常 に 画 像 中 で 静 止 して 見 え る 状 態 を維 持 す る こ と が,注 視 制 御 の 目的 で あ る.ま たxtの よ う に チ ル ダ を付 け た も の は予 定 動 作 の 変 数 で あ る こ と を 示 す. 本 論 文 で は,二 次 元 平 面 の ロ ボ ッ トの 動 作 の み を扱 うが,2足 歩 行 ロ ボ ッ トの 自 由 度 を 生 か した よ り高 度 な タ ス ク を考 え る 場 合,三 次 元 空 間 へ の 拡 張 が 重 要 な 問 題 と な る.本 論 文 の 位 置 づ け は,シ ン プ ル な モ デ ル の み を 用 い て 視 覚 が ロ ボ ッ トの 動 作 制 御 に 与 え得 る 影 響 を探 る こ とで あ り,複 雑 な タ ス ク を取 り扱 う た め の 基 礎 研 究 で あ る. 2.2予 定 動 作 を用 い た フ ィー ドフ ォ ワ ー ド制 御 Fig.3に 示 した よ う に,[xt,zt]T,γt.,et,atに は 近 似 的 に 次 の 幾 何 学 的 な 関 係 が あ る. at+θt=βt-rt-tan-1(xt/ zt)-γt.(1) 制 御 目標 はat=0で あ る の で,式(1)よ り時 刻tで 必 要 な 首 振 り角 速 度 は次 式 で 与 え ら れ る. 〓(2) 注 視 機 構 の ダ イ ナ ミ ク ス を,制 御 入 力vtを 用 い て 以 下 の よ う に 表 す.た だ し,Lは む だ 時 間 で あ る.実 機 で は,vtは 首 関 節 モ ー タへ の 速 度 指 令 入 力 で あ る. 〓t=W(vt(t-L))(3) 式(3)の 逆 モ デ ル を 考 え,式(2)を 用 い る と,時 刻tで の 制 御 入 力Z'tは 〓(4) と な る.つ ま り,未 来 の 時 刻t+Lで の 動 作 か ら 現 在 の 時 刻t の 入 力vtを 計 算 す る こ と に な る.実 際 に は,未 来 の 時 刻t+L で の動 作 を知 る こ と は で き な い の で,事 前 に分 か る ロ ボ ッ トの 予 定 動 作[Nxt,zt]T,γtを 実 際 の ロ ボ ッ トの 動 作[xt,zt]T,γtの 代 わ り に 用 い,次 の よ う に 時 亥1拷で の 制 御 入 力vtを 計 算 す る. 〓(5) た だ し,Dtは 予 定 動 作 か ら計 算 さ れ る 時 刻tで の 注 視 対 象 と ロ ボ ッ ト との 距 離 で あ る.
Fig.4 Block diagram of 2 DOF gaze control system
Fig.5 Gyro signal and a result fo gyro signal processing
2.3予 定 動 作 を用 い た フ ィー ドフ ォ ワ ー ド制 御 と視 覚 フ ィー ドバ ッ ク 制 御 を用 い た注 視 制 御 系 式(5)の フ ィー ドフ ォ ワ ー ド制 御 に よ り,む だ時 間 を補 償 し, ロ ボ ッ トの 動 作 に よ っ て 起 き るatの 変 化 を あ ら か じめ 小 さ く 抑 え る こ とで,フ ィー ドバ ッ ク制 御 を 有 効 に機 能 さ せ る.具 体 的 に は,フ ィー ドフ ォ ワ ー ド制 御 を視 覚 と ジ ャ イ ロ の フ ィ ー ド バ ッ ク系 に 追 加 し,Fig.4の よ う に2自 由 度 制 御 系 を構 成 す る.ロ ボ ッ トの 動 作 に よ っ て発 生 す るatの 変 化 を フ ィー ドフ ォ ワ ー ド制 御 で 抑 え,式(5)の 計 算 で 用 い られ る 首 振 り の ダ イ ナ ミ ク スや,式(5)の 近 似 計 算 に よ る誤 差 な どで 起 こ るatの 変 化 を 視 覚 と ジ ャ イ ロ を 使 っ た フ ィー ドバ ッ ク 制 御 で 抑 え る こ とで,(at-ao)を0に す る.実 際 の ロ ボ ッ トの 動 作 が 予 定 動 作 と大 き く異 な る場 合,フ ィー ドフ ォ ワ ー ド制 御 か ら の 信 号 が ロ ボ ッ トの 振 る 舞 い を逆 に悪 化 させ る 要 因 と な り得 る が,こ の 場 合 に お い て も閉 ル ー プ 系 の 安 定 性 を 確 保 し誤 差 を打 ち 消 す こ とが,フ ィ ー ドバ ッ ク制 御 器 の 重 要 な 役 割 の 一 つ で あ る.ま た, 実 機 の 胸 部 に 内 蔵 さ れ て い る ジ ャ イ ロ セ ン サ か ら の 信 号 に は, Fig.5の よ う に,オ フ セ ッ ト,高 周 波 ノ イ ズ,0.1[s]程 度 の 遅 れ が 含 ま れ て い る た め,オ フ セ ッ トの 除 去,低 域 通 過 フ ィ ル タ に よ る ノ イズ の 除 去,制 御 周 期 に 合 わ せ た ダ ウ ンサ ン プ リ ン グ を 行 っ て い る. 3.注 視 制 御 に よ る ロ ボ ッ ト動 作 の 安 定 化 ロ ボ ッ トの 動 作 を ロ ボ ッ トの 移 動 空 間 に 固 定 され た ワ ー ル ド 座 標 系,お よ び,注 視 対 象 を 原 点 と し た ロ ボ ッ ト座 標 系 で 表 す.こ の ロ ボ ッ ト座 標 系 は 前 章 で 用 い た 座 標 系 で あ る.ま た, ワ ー ル ド座 標 系 の 変 数 に は,左 肩 に 添 え 字Wを 付 す.新 た に 時 刻tで の ロ ボ ッ ト,お よ び 注 視 対 象 の 位 置 姿 勢 を そ れ ぞ れ 日本 ロボ ッ ト学 会 誌24巻6号 47 2006年9月
730 滝 澤 象 太 牛 田 俊 出 口 光 一郎 wP t=[xt,zt.,rt,1]T,wP。bj=[xobj,zobj,0,1]Tと 表 し,同 様 に予 定 動 作 に お け る ロ ボ ッ ト,注 視 対 象 の 位 置 姿 勢 をwPc, wPo bjと 定 義 す る.以 下 の 議 論 で は,次 の こ と を仮 定 す る. ●ロ ボ ッ トは 完 全 に 注 視 を 実 現 し,αt=αo=0で あ る.そ の た め,ロ ボ ッ トに 対 す る 注 視 対 象 の 方 向 は カ メ ラ の 首 振 り角 度etに 完 全 に 一 致 す る. ●注 視 対 象 は滑 ら か に 運 動 す る . ●足 裏 と 床 との す べ りは 遊 脚 と 支 持 脚 の 切 り替 え時(両 足 が 床 に 接 地 して い る と き)に 起 こ り,片 足 立 ち の と き の 支 持 脚 と床 と の す べ り は な い もの とす る. 3.1首 振 り角 度 誤 差 の 定 式 化 Fig.6に 示 す 注 視 対 象 と ロ ボ ッ トと の 幾 何 学 的 な 関 係 か ら, 首 振 り誤 差 △etと ロ ボ ッ トの 位 置 お よ び 姿 勢 の ず れ との 関 係 を 導 出 す る.上 半 身 の 揺 れ や 足 裏 の す べ り等 に よ っ て,実 際 の 動 作 と予 定 動 作 に は ず れ が 生 じる.xお よ びz方 向 の 予 定 動 作 か ら の 位 置 の ず れ を △lx,△lz,姿 勢 の ず れ を △rと す る.WPf は, wP t-wPt+[△lx,△lz,△r,0]T(6) と表 され る.ま た 首 振 り角etは,式(1)お よび 制 御 目標at=0 を 満 た す よ う に次 式 で 与 え ら れ る. θf=βt-(rt+△ γ)(7) た だ し,βtは βt=tan-1{(xt+△lx)/(zt+△lz)}で あ る.一 方,予 定 動 作wPrか ら 計 算 さ れ る 首 振 り 量etは, θt=βt-rt(8) とな る た め,首 振 り量 の 差 △etは 次 式 で 与 え ら れ る. △et=(βt-βt.)-△ γ(9) 加 法 定 理 か らtan(βt-βt)は, 〓(10) を 満 た す の で,式(9)お よ び 式(10)か ら次 式 を得 る. 〓(11)
Fig.6 Relations between real and scheduled robot positions at timet 3.2歩 行 時 の 上 体 の 揺 れ を利 用 した 動 作 誤 差 の 推 定 歩 行 時 の 上 体 の 周 期 的 な揺 れ を利 用 し,式(11)か ら ロ ボ ッ トの 進 行 方 向 お よ び 注 視 対 象 と の 距 離 の ず れ を 推 定 す る.予 定 動 作 と して,以 下 の よ うな 一 歩1同 で 前 進 す る動 作 を 考 え る. w 〓(12) 式(12)の 動 作 は,ロ ボ ッ トの 腰 の 中 心(重 心 位 置 で あ り首 振 り の 回 転 中 心)の 軌 跡 を示 して お り半 波 長 で 一 歩 分 の 動 作 に相 当 す る.式(12)に よっ て,安 定 な歩 行 動 作 が 実 現 され る こ と を理論 的 に保 証 す る こ と は容 易 で は な い が,実 機 実 験 の 設 定 の 部 分 で 後 述 す る よ う に,実 際 に安 定 な歩 行 を実 現 す る パ ラ メ ー タ(A,B,ω) の 組 が 得 られ て い る.ま た,位 相0,π お よ び2π で 支 持 脚 の 切 り替 え が 起 きる こ とに 注 意 さ れ た い.た だ し,[xo,zo,ro]Tは 時 刻t=0で の ロ ボ ッ トの 位 置 姿 勢,A,Bは 定 数,ω は ロ ボ ッ ト動 作 の 角 周 波 数 で あ る.ま た,R('yo)は 回 転 を 表 す 行 列 で 以 下 の よ う に定 義 す る. 〓(13) 注 視 対 象 が 静 止 して い る 場 合,△lx,△lzは ロ ボ ッ トの 足 裏 と 床 面 と の 間 の ス リ ッ プ に よ っ て 発 生 す る.ス リ ッ プ は主 に脚 の 切 り替 え 時 に起 こ る の で,△lrお よ び △lzは 位 相0,π,2π で ス テ ッ プ 的 に 変 化 す る と仮 定 で きる.さ ら に,式(12)の よ う な 周 期 動 作 の 場 合,床 面 の 状 態 が 一様 で あ れ ば1歩 ご と の △lx お よ び △l、は ほ ぼ 同 じ値 を と る と考 え て よい.以 上 の 議 論 か ら,
ここでは 乢
お よOlzを
一定 値 と して扱 う・区間 陪
引
(2歩 分 の 動 作)で 式(10)を 積 分 す る と,以 下 の よ う に な る. n 〓(14) た だ し,V2t=zt(zt+△lz)+xt(xt+△Zの で あ る.式(14)の 右 辺 第1項 の 分 子 は奇 関数 で あ る.ま た,(△12+△zl2)《(x2t+tz2) が 成 り立 つ 場 合,分 母 をV2t〓z2t+x2t=D2t.と み な せ る た め 式(14)の 右 辺 第1項 の 分 母 を 偶 関 数 と考 え る こ と が で き る. そ の た め,式(14)の 右 辺 第1項 は 奇 関 数 の 周 期 積 分 と考 え る こ とが で き る.実 際,式(14)の 右 辺 第1項 はFig.7に 示 す よ う に,z0が 小 さ い つ ま り ロ ボ ッ トが 注 視 対 象 か ら離 れ る ほ ど 0に 近 づ く.ま た,Fig.8に 示 す よ う に,式(14)の 右 辺 第1 項 は,第2項 に比 べ て 極 め て 小 さ い た め,右 辺 第1項 を無 視 す る こ と が で き,次 式 を 得 る.(15)
注視に よる2足 歩行 ロボッ トの歩行動作 の安定化 731
Fig.7 Integration of the first
term of the right member in
Eq.(14)
Fig.8 Com w
parisonof〓tan(βt-/3t)dt with thefirst trem
of the right member in Eq.(14)
実 際 に,式(15)が 成 り立 つ の は ロ ボ ッ トと注 視 対 象 の 距 離 が 約1[m]以 上 あ る場 合 で あ る. ロ ボ ッ トの 進 行 方 向 をz軸 方 向 に(r0=0),ロ ボ ッ トの 初 期 位 置 をz軸 上 に(xo=0)と っ た 場 合 を 考 え る.ロ ボ ッ トか ら対 象 ま で の 距 離Dtが 十 分 に 大 きい とい う 仮 定(5)の 下 で は,x 軸 方 向 の す べ り に よ る 位 置 の 誤 差 △lx,は 無 視 す る こ とが で き, 式(15)は, 〓(16) と な る.そ の た め,式(9)の 右 辺 第1項(床 と足 裏 の ス リ ッ プ に よ る 項)は 平 均0で 振 動 す る項,第2項(床 と垂 直 な軸 周 りの 回 転 の 項)は 振 動 の オ フ セ ッ トと考 え る こ と が で き る.こ の 性 質 を 利 用 す る こ とで,時 刻tで の ロ ボ ッ トの 向 い て い る 方 向 の ず れ(方 向 の 誤 差)△'yt,ロ ボ ッ トと注 視 対 象 と の 距 離 の ず れ(距 離 の 誤 差)△ltを 計 算 す る こ とが で き る.方 向 の 誤 差 △'ytは 時 刻tで の 首 振 りの 誤 差 △etを 用 い て, 〓(17) と 表 す.こ こ で は,△ 筆 を △'ytの 平 均 で 置 き 換 え て い る (Fig.9(a)).ま た,z軸 に 沿 っ た ロ ボ ッ ト と注 視 対 象 と の 距 離 の 誤 差 △lzを 改 め て △ltと 表 す.△ltは, 〓(18) と表 さ れ る.△'ytと 同 様 に △ltを △ltの 平 均 で 置 き換 え る こ と で 計 算 す る.こ れ は,Fig.9(b)の 灰 色 部 分 の 平 均 を求 め る こ と
Fig.9 (a) Offset distance between θt and θt and(b)distance error component of △ θt
Fig.10 Motion stabilization system based on the gaze control
に相 当 す る.ま た,実 際 の 計 算 で は 積 分 の代 わ り に,△etの 平 均E[△atを 用 い て △rtお よ び △ltを 計 算 す る. 3.3視 覚 を用 い た 動 作 安 定 化 制 御 系 の 構 成 Fig.10に 視 覚 を用 い た 動 作 安 定 化 制 御 系 を示 す.制 御 系 は 注 視 制 御 系 を基 に 設 計 さ れ て お り,フ ィー ドバ ッ ク制 御 器 と フ ィー ドフ ォ ワ ー ド制 御 器 を もつ2自 由度 構 造 を と る.提 案 す る 制 御 系 で は,制 御 入 力vtを 事 前 に 同 定 し た首 振 りの ダ イ ナ ミク ス 式 (3)を 用 い てetを 計 算:する.次 に,etと 実 際 の 首 振 り角etの 差 △etを 計 算 し,式(17),(18)を 用 い て 距 離 お よ び 進 行 方 向 の ず れ を推 定 しロ ボ ッ トの 進 行 方 向 お よ び 予 定 動 作 を 修 正 す る. こ の 修 正 は,予 定 動 作 を 規 範 モ デ ル とす る モ デ ル 規 範 型 適 応 制 御 の 適 応 則 に 基 づ い て 以 下 の よ う に行 わ れ る. 式(9)の 第1項(振 動 項)は 制 御 の 過 程 で 相 殺 さ れ て し ま う た め,式(17)の △'Ytを 直 接 方 向 の 修 正 に 利 用 で き る.実 際 の ロ ボ ッ トの 動 作 を, と 修 正 す る.た だ し・φt=∫to△-rdTで あ る.進 行 方 向 の 修 正 に よ っ て,θtと θtの オ フ セ ッ トが な くな り,振 動 中 心 が 一 致 す る.式(18)の △ltを 用 い て,予 定 動 作 を 〓(19) 〓(20) と修 正 す る.た だ し,Kは ゲ イ ン を 示 す 定 数 行 列 で あ る.Uz= 日本 ロ ボ ッ ト学 会 誌24巻6号 49 2006年9月
732 滝 澤 象 太 牛 田 俊 出 口 光一郎
Fig.11 Estimation of distance to the target
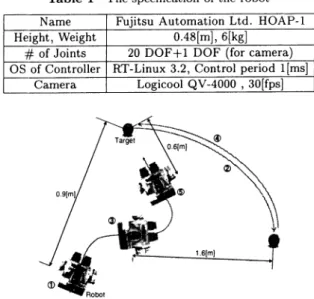
[0100]Tは,+z方 向 の 戦 ベ ク トル で あ り・ ポ ッ トの 進 行 方 向 と一 致 す る.式(20)の 第2項 が 距 離 の 補 正 項 で あ る. 注 視 と動 作 の 修 正 を繰 り返 す こ と に よ っ て,最 終 的 に は首 振 り誤 差 △etが 小 さ く な り予 定 動 作 と実 際 の 動 作 が 一 致 す る. 4.シ ミ ュ レ ー シ ョ ン 実 験 4.1実 験 方 法 実 機 実 験 に 先 立 ち,MATLABを 用 い て シ ミュ レ ー シ ョ ン実 験 を 行 っ て 提 案 す る動 作 安 定 化 制 御 系 の 有 効 性 を 評 価 す る.実 験:では,2足 歩 行 ロ ボ ッ トが そ の 場 で 足 踏 み 動 作 を 行 い,注 視 対 象 が ロ ボ ッ トの 正 面 に来 る よ う に 動 作 を安 定 化 した 際 の 予 定 動 作 の もつ 注 視 対 象 との 距 離 情 報 を 評 価 す る. 4.2実 験 結 果 Fig.11に,実 際 の 注 視 対 象 との 距 離 を 変 え た場 合 で の 予 定 動 作 が もつ 距 離 情 報 の 変 化 を 示 す.す べ て の 場 合 で,距 離 の 推 定 値 が あ る値 に 収 束 し 同 時 に 首 振 り誤 差 も 小 さ く な っ た.ま た 実 験 中 は,常 に 注 視 対 象 が ロ ボ ッ トの 正 面 に 保 た れ た.注 視 対 象 と の 距 離 が 大 き くな る ほ ど,推 定 さ れ た 距 離 情 報 と実 際 の距 離 と の ず れ が 大 き くな る.こ れ は,注 視 対 象 と の 距 離 に 応 じて 首 振 り誤 差 も小 さ く な り,距 離 の ず れ の 推 定 値 が 注 視 誤 差 に埋 もれ て 正 確 な推 定 が 行 え な か っ た た め で あ る.注 視 誤 差 が あ る 程 度 小 さ く な る と,距 離 推 定 の 適 応 機 構 へ の 影 響 も小 さ くな る こ と か ら,距 離 の 推 定 値(適 応 パ ラ メ ー タ)の 真 値 へ の 収 束 性 は 必 ず し も保 証 され な い.こ の 事 実 は 適 応 制 御 系 の 特 徴 で あ り, そ の 帰 結 と して,注 視 対 象 との 距 離 が 離 れ て い る場 合 は,距 離 の 推 定 値 が 実 際 の 距 離 か ら ず れ て も動 作 の 安 定 化 や 適 応 機 構 に 与 え る 影 響 が 少 な い こ とが 分 か る.す な わ ち,提 案 した 制 御 系 に お い て 距 離 情 報 に そ れ ほ ど高 い 精 度 を必 要 と しな い. 5.実 機 に よ る 検 証 実 験 5.1実 験 方 法 提 案 す る動 作 安 定 化 制 御 系 を,実 際 の 単 眼 視 覚 を もつ2足 歩 行 ロ ボ ッ トを用 い て 検 証 す る.使 用 した ロ ボ ッ トの 概 要 をTable1 に 示 す. 各 制 御 ゲ イ ンは,事 前 に 限 界 感 度 法 を 用 い て 決 定 し実 験 中常 に 一 定 値 を用 い た.画 像 上 で の 注 視 対 象 の 追 跡 に は,ロ バ ス トに 追 跡 を 行 え る 平 均 値 シ フ ト法[22]を 用 い た.ま た,注 視 機 構 の ダ イナ ミ ク ス は 事 前 に 同定 実 験 を行 い,そ の 同 定 結 果 を 用 い た.
Table 1 The specification of the robot
Fig.12 Experimental settings of motion stabilization on the biped robot HOAP-1
5.1.1実 験1:対 象 ま で の 距 離 の 推 定 2足 歩 行 ・ ポ ッ トが そ の 場 でf=w/2π=0.5[Hz]の 動 作 周瀲 で 足 踏 み 動 作 を行 い,注 視 対 象 が ロ ボ ッ トの 正 面 に くる よ う に動 作 を安 定 化 した 際 の予 定 動 作 の もつ 注 視 対 象 との 距 離 情 報 を 評 価 す る.足 踏 み の 際 の ロ ボ ッ ト本 体 の左 右 の 振 幅 はA=0.05[m] で あ る.注 視 対 象 は,直 径0.1[m]の 蛍 光 ピ ン ク の 球 で あ る. 5.1.2実 験2:前 進 動 作 の 安 定 化 注 視 対 象 が,ロ ボ ッ トの 進 行 方 向 上 に くる よ う に前 進 動 作 を 安 定 化 す る.予 定 動 作 と して 静 止 して い る 対 象 に 向 か っ て 前 進 す る動 作 を与 え,注 視 対 象 と ロ ボ ッ トとの 距 離 の 初 期 値 は 任 意 の 値 を 用 い た.ロ ボ ッ トの 歩 行 速 度 は,B=0.005[m/s]で あ る. 5.1.3実 験3:移 動 す る対 象 に 対 す る動 作 の 安 定 化 人 が 動 か す 注 視 対 象 に 合 わ せ て動 作 を修 正 し,注 視 対 象 が ロ ボ ッ トの 正 面 に く る よ う に 動 作 を安 定 化 す る.対 象 の 運 動 を モ デ ル 化 す る こ と は 難 し い た め,予 定 動 作 で は 注 視 対 象 は静 止 し て い る と して 動 作 を 計 画 し た.ま た,予 定 動 作 の もつ 注 視 対 象 と17ポ ッ トと の 距 離 は1[m]を 初 期 値 と し て 用 い た ・ 具 体 的 な 実 験 の 手 順 は,Fig.12の 通 りで あ る. (1) 注 視 対 象 を ロ ボ ッ トの 正 面 か ら0.9[m]の と こ ろ に置 き,推 定 距 離 の 初 期 値 をZl=1[m]と し て ロ ボ ッ トの 動 作 を 開 始 す る.ロ ボ ッ トは,注 視 対 象 の ほ うへ 真 っ直 ぐ に前 進 す る. (2)開 始 か ら2分 後 に,注 視 対 象 を 人 の 手 で 移 動 させ る.ロ ボ ッ トの 進 行 方 向 が,注 視 対 象 が 正 面 に くる よ う に制 御 さ れ る. (3)2分 ほ ど ロ ボ ッ トを 注 視 対 象 の ほ うへ 前 進 させ る. (4)再 び注 視 対 象 を ゆ っ く り と動 か し,元 の位 置 に戻 す.ロ ボ ッ トの 進 行 方 向 は,再 び注 視 対 象 が 正 面 に来 る よ う制 御 され る. (5)最 後 に1分 ほ ど注 視 対 象 の 方 へ 前 進 させ る. 動 作 中 は 常 に 注 視 対 象 と の距 離 と方 向 が 推 定 され,そ れ ら の 推 定 値 を も と に 注 視 制 御 と予 定 動 作 の 修 正 が 行 わ れ る. 5.2実 験 結 果 5.2.1実 験1:対 象 まで 距 離 の 推 定 Fig.13に,実 際 の 距 離 を 変 え た 場 合 の 予 定 動 作 が もつ 距 離
注 視 に よる2足 歩 行 ロ ボ ッ トの 歩 行 動 作 の 安 定 化 733
Fig.13 Estimation of distance to the target
Fig.14 Motion stabilization when the robot walks forward
Fig.15 Motion stabilization to moving target
情 報 の 変 化 を 示 す.す べ て の 場 合 で,距 離 の推 定 値 が あ る値 に 収 束 し同 時 に 首 振 り誤 差 も小 さ くな っ た.ま た 実 験 中 は,常 に 注 視 対 象 が ロ ボ ッ トの 正 面 に保 た れ た.こ の 結 果 は,距 離 情 報 の修 正 過 程 を含 め てFig.11に 示 す シ ミュ レ ー シ ョ ン結 果 と同 様 の 波 形 に な っ て い る.ま た,注 視 対 象 との 距 離 が 大 き くな る ほ ど,推 定 され た距 離 情 報 と実 際 の 距 離 との ず れ が 大 き くな る が, こ れ は シ ミュ レー シ ョ ン実 験 の 場 合 と 同 様 に,対 象 との 距 離 が 離 れ る ほ ど 予 定 動 作 の も つ 距 離 情 報 が 提 案 す る 制 御 系 に与 え る 影 響 が 少 な く な っ た た め で あ る.こ の こ と か ら,実 機 に よ る実 験 で 提 案 した 制 御 系 が 設 計 通 り に機 能 して い る こ とが 分 か る. 5.2.2実 験2:前 進 動 作 の 安 定 化 Fig.14に,実 験2の 結 果 を 示 す.図 中 の 丸 い ボ ー ル が 注 視 対 象 で あ り,机 の 上 の 白 い 直 線 は 注 視 対 象 の 方 向 と平 行 に引 か れ た ビ ニ ー ル テ ー プ で あ る.動 作 安 定 化 制 御 を 行 わ な い 場 合,机 の 上 の 摩 擦 と ビ ニ ー ル テ ー プ の 摩 擦 の 違 い か ら進 行 方 向 が 大 き くず れ て い る が,視 覚 を 用 い た 動 作 安 定 化 制 御 に よ っ て,対 象 に 向 か っ て ま っ す ぐ前 進 歩 行 が 行 え て い る. 5.2.3実 験3:移 動 す る 対 象 に 対 す る動 作 の 安 定 化 Fig.15に 示 す よ う に,対 象 が 移 動 す る 場 合 で も視 覚 を 用 い た動 作 安 定 化 制 御 を 行 う こ と が で き た. Fig.16に,推 定 さ れ た 注 視 対 象 ま で の 距 離 の 変 化 の 様 子 を 示 す.実 線 は推 定 さ れ た 距 離,破 線 は 注 視 対 象 と ロ ボ ッ トが 予
Fig.16 Estimation of distance, when the robot adjusts its di-rection depending on the target motion
Fig.17(a) θt and θt in early estimation and(b)when estimated distance converges a constant value
定 動 作 を 完 全 に 実 現 した 場 合 の 対 象 との 距 離 で あ る.注 視 対 象 が,ロ ボ ッ トか ら離 れ る 場 合(区 間(2))や 遠 い 場 合(区 間(3)) は 距 離 の 推 定 値 が 大 き くず れ たが,動 作 安 定 化 に は ほ とん ど 影 響 が な か っ た.一 方 で,予 定 動 作 の 距 離 情 報 が 大 き な影 響 を与 え る場 合(区 間(1),(4),(5))で は,推 定 結 果 に ロ ボ ッ トや 注 視 対 象 の 運 動 が 反 映 され 推 定 誤 差 も小 さ くな っ て い る. Fig.17に,Fig.16中 の 対 象 の 移 動 中(a)お よ び 静 止 中(b) に お け る 実 際 の 首 振 り量eお よ び 予 定 動 作Btか ら計 算 され る 首 振 り量 を示 す.今 回 の 実 験 で は,注 視 対 象 の 運 動 を静 止 して い る と考 え て モ デ ル 化 し た た め,注 視 対 象 の 運 動 は,制 御 系 に 対 す る 外 乱 入 力 と な る.Fig.17(a)で は,注 視 対 象 の 移 動 に よ る 影 響 を 十 分 に 補 償 で きて い な い が,Fig.17(b)に な る とそ の 影 響 を補 償 しBtとBzが 近 い 波 形 と な っ て い る. 実 験 結 果 か ら,動 作 安 定 化 制 御 を ナ ビ ゲ ー シ ョ ンや 障 害 物 回 避 に利 用 で き る こ とが 分 か る. 6.お わ り に 本 研 究 で は,2自 由 度 型 制 御 構 造 を もつ 注 視 制 御 を利 用 し,ロ ボ ッ トか ら見 た 注 視 対 象 の 方 向 を 保 つ 動 作 安 定 化 制 御 系 を提 案 し た.提 案 す る 制 御 系 の 有 効 性 を シ ミ ュ レー タお よ び 実 機 に よ る 実 験 に よ っ て 示 した.実 際 に設 計 した 制 御 系 の 動 作 を ま と め る とFig.18の よ うに な る.こ こ で 提 案 す る 制 御 系 の 重 要 な特 徴 と し て は,以 下 の2点 が 挙 げ られ る. 予 定 動 作 の 重 要 性:予 定 動 作 を 用 い る こ と で,予 測 を行 う こ と な く む だ 時 間 を 補 償 で き る た め,不 連 続 な ロ ボ ッ トの 動 作 に あ る程 度 対 応 で き る.ま た,予 定 動 作 を行 っ た 場 合 の 首 振 り量 と実 際 の 首 振 り量 か ら動 作 の ず れ を推 定 で き る. 視 覚 の 重 要 性:視 覚 を 用 い た こ と で,外 部 に 設 け た 基 準 に対 す る ロ ボ ッ トの 移 動 量 や 進 行 方 向 を計 測 で き る.今 回 視 覚 の 機 能 と し て は 一 点 を注 視 す る とい う 単 純 な もの で,用 い た 視 覚 情 日本 ロ ボ ッ ト学 会 誌24巻6号 51 2006年9月
734 滝 澤 象 太 牛 田 俊 出 口 光一郎
Fig.18 Basic strategy of motion stabilization
報 は 注 視 対 象 の 方 向 だ け で あ る が,こ れ に よ っ て 実 際 の 動 作 を 修 正 し 予 定 動 作 を 実 現 す る こ と や,予 定 動 作 を 修 正 し 実 際 の 動 作 を 推 定 す る こ と が 可 能 と な っ て い る. 参 考 文 献 [1] 加 賀 美 聡,西 脇 光 一,岡 田慧,稲 葉 雅 幸,井 上 博 允:“ ヒ ュ ー マ ノ イ ドH7に よ る三 次 元 視 覚 を 用 い た 地 形 モ デ リ ン グ”,日 本 ロ ボ ッ ト学 会 創 立20周 年 記 念 学 術 講 演 会 予 稿 集CD-ROM, p.3C24, 2002.
[2] K. Nishiwaki, S. Kagami, J.J. Kuffner, K. Okada, Y. Kuniyoshi, M. Inaba and H. Inoue: •gOnline Humanoid Walking Con-trol and 3D Vision-based Locomotion,•g Experimental Robotics VIII: Proceedings of the 8th International Symposium ISER02, pp.85-94, 2003.
[3] J. Gutman, M. Fukuchi and M. Fujita: •gStair Climbing for Humanoid Robots Using Stereo Vision,•h Proc. of Int. Conf. on Intelligent Robots and Systems, pp.140.7-1413, 2004.
[4] R. Kurazume and S. Hirose, •gDevelopment of image stabiliza-tion system for a remote operation of walking robots,•h Proc. IEEE Int. Conf. on Robo. and Auto., pp.1856-1861, 2000. [5] 永 田 隆 信,石 田 明 允,福 岡 豊,南 谷 晴 之:“ 直t姿 勢 に お け る 視 覚 系
の 役 割 ”,医 用 電 子 と 生 体工 学, vol.39, no.2, pp.95-101, 2001. [6] 江 依 法,長 崎 幸 雄:“ 高 齢 者 の 健 康 評 価 技 術― 直 立 時 身 体 動 揺 測 定 法
と 平 行 能 力 の 評 価 ”,非 破 壊 検 査, vol.51, pp.567-572, 2002. [7] S. Ushida, J. Terashita and H. Kimura: •gSwitching Structural
Biomechanical Model of Multisensory Integration during Hu-man Quiet Standing,•h Proc. of the 43rd Conference on Decision and Control, pp.959-965, 2004.
[8] A. de Rugy, et al.: •gThe control of human locomotor pointing under restricted information condition,•h Neuroscience Letter,
vol.281, pp.87-90, 2000.
[9] K. Yamane and Y. Nakamura: •gDynamics Filter-Concept and Implementation of On-Line Motion Generator for Human
Fig-ures,•h Proc. of ICRA2000, pp.695-699, 2000.
[10] M. Ogino, Y. Katoh, M. Aono, M. Asada and K. Hosoda: •gRe-inforcement Learning of Humanoid Rhythmic Walking Parame-ters based on Visual Information,•h Advanced Robotics, vol.18, no.7, pp.677-697, 2004.
[11] K. Deguchi and T. Nakagawa: •gActive and Direct Acquisition of 3D Map in Robot by Combining Motion and Perceived Im-ages,•h Proc. of International Conference on Intelligent Robots and Systems, pp.1692-1697, 2004. [12] 田 冨 幸 春,稲 葉 雅 幸,井 上 博 允:“ 人 間 型 ロ ボ ッ トの 片 足 脚 動 作 に お け る 全 身 を 用 い た 実 時 間 バ ラ ン ス 補 償 ”,日 本 ロ ボ ッ ト学 会 誌, vo1.17, no.2, pp.268-274, 1999. [13] 梶 田 秀 司,金 広 文 男,金 子 健 二,藤 原 清 司,原 田 研 介,横 井 一 仁,比 留 川 博 久:“ 分 解 運 動 量 制 御: 運 動 量 と 角 運 動 量 に 基 づ く ヒ ュ ー マ ノ イ ド ロ ボ ッ トの 全 身 運 動 生 成 ”,日 本 ロ ボ ッ ト学 会 誌, vol.22, no.6. pp.772-779, 2004.
[14] K.S. Narendra and A.M. Annaswamy: Stable Adaptive
Sys-tems. Prentice Hall, Chap. 5, 1989.
[15] J.E. Slotine and W. Li: Applied Nonlinear Control. Prentice
Hall, Chap. 8, 1991.
[16] 滝 澤 象 太,牛 田 俊,出 口 光 一 郎:“2自 由 度 型 制 御 構 造 を も つ 注 視 制 御 に よ る ロ ボ ッ ト動 作 の 安 定 化 ”,第10回 ロ ボ テ ィ ク ス シ ン ポ ジ ア 予 稿 集, 4A3, pp.337-342, 2005. [17] 藤 本 博 志,堀 洋 一:“ マ ル チ レ ー ト制 御 と む だ 時 間 補 償 に 基 づ く ビ ジ ュ ア ル サ ー ボ “,日 本 ロ ボ ッ ト学 会 誌, vol.22, no.6, pp.780-787, 2004. [18] 宮下 敬 宏,細 田 耕,竹 内 進,浅 田 稔:“ 反 射 の 組 み 合 わ せ に よ る 歩 行 の 実 現 ”,日 本 ロ ポ ッ ト学 会 誌, vol.18, no.3, pp.381-386, 2004. [19] 細 田 耕,浅 田 稔:“ 構 造 や パ ラ メ ー タ に 関 す る 先 験 的 な 知 識 を 必 要 と しな い フ ィー ド フ ォ ワ ー ド補 償 器 を 持 つ 適 応 型 ビ ジ ュ ア ル サ ー ボ 系 の 構 成 ”,日 本 ロ ボ ッ ト学 会 誌, vol.14, no.2. pp.313-319, 1996.[20] T. Shibata and S. Schaal: •gBiomimetic Gaze Stabilization
based on Feedback-Error-Learning with Nonparametric
Regres-sion Networks,•h Neural Networks, vol.14, pp.201-216, 2001.
[21] 滝 澤 象太,牛 田俊,出 口 光 一 郎;“ 視 覚 フ ィー.ドバ ッ ク と予 定 動 作 計 画 を結 合 した ロボ ッ トの 注 視 制 御”,第22回 日本 ロ ボ ッ ト学 会 学 術 講 演 会 予 稿 集CD-ROM, 3F12, 2004.
[22] D. Comaniciu, V. Ramesh and P. Meer: •gKernel-Based Object
Tracking, IEEE Transactions on Pattern Analysis and
Ma-chine Intelligence, vol.25, no.5, pp.564-575, 2003.
滝 澤 象 太(Shota Takizawa) 1977年8月30日 生.2005年 東 北 大 学 大 学 院 情 報 科 学 研 究 科 博 士 課 程 前 期 修 了.同 年 フ ァ ナ ッ ク株 式 会 社 入 社.産 業 用 ロ ボ ッ トの 研 究 開 発 に 従 事.現 在 に 至 る.(日 本 ロ ボ ッ ト学 会 正 会 員) 牛 田 俊(Shun Ushida) 1973年1月8日 生.2001年 東 京大 学 大 学 院 工学 系 研 究 科 計 数 工 学 専 攻 博 士 後 期 課 程修 了(計 数工 学).同 年東 京 大学 大 学 院新 領 域 創 成 科学 研 究 科助 手.2004年 東 北 大 学 大 学 院 情 報 科 学 研 究 科 助 手, 現 在 に至 る.主 と して ロバ ス ト制 御 理論 お よ び ロボ テ ィクス の研 究 に従 事.計 測 自動 制 御学 会,シ ス テ ム 制 御 情 報 学 会,IEEECSSの 会 員.1997-2000年 日 本 学 術 振 興 会 特 別 研 究 員.(日 本 ロ ボ ッ ト学 会 正 会 員) 出 口 光 一 郎(Koichiro Deguchi) 1948年5月9日 生.1976年.東 京 大学.大学 院..1二学 系 研 究 科 修 士 課 程 修r(計 数]二学).同 年 よ り 東 京 大 学 工 学 部 助 手,講 師,1984年 山 形 大 学].:学 部 助 教 授,1988年 東 京 大 学 助 教 授,1998年 東 北 大 学 大 学 院 情 報 科 学 研 究 科 教 授,現 在 に 至 る.コ ン ピ ュ ー タ ビ ジ ョ ン,画 像 計 測 の 研 究 に 従 事.情 報 処 理 学 会, 電 子 情 報 通 信 学 会,計 測 自 動 制 御 学 会,形 の 科 学 会,IEEE等 の 会 員.(日 本 ロ ボ ッ ト学 会 正 会 員)