別紙様式1 (修士申請者用)
修士学位論文
様々な身体部位における
歩行中の物体知覚と行動調整に関する検討 ーダイナミックタッチの貢献
一(西暦)2018年 12月 27日 提出
首都大学東京大学院
人間健康科学研究科博士前期課程人間健康科学専攻 ヘルスプロモ ー ションサイエンス学域 学修番号:17899608
氏 名:渡遣 諒
要旨
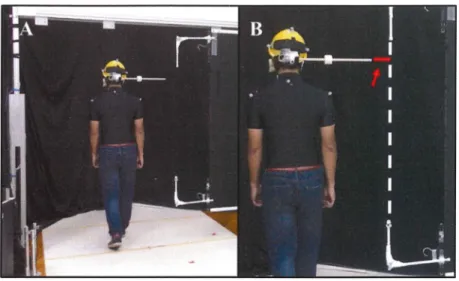
私たちは歩行中, 手以外にも身体の各部位に物体を身に着けたまま巧みに行動を 調整できる。 本研究では, 様々な身体部位に物体を伴った状態でも適切に歩行調整 する際に, ダイナミックタッチで得られた情報が利用されていることである。 ダイ ナミックタッチとは, 身体との間に発生する抵抗からその物体の特性を知覚するプ ロセスのことである。 本研究では, このダイナミックタッチの関与を実証する方法 として, 参加者に棒が見えないようゴーグルで視野を制限した状態で, 錘を取り付 けた棒を振ってもらった。 実験中には, その錘の取りつけ位置を変えることによ り, 棒と身体部位との間に発生する慣性モーメントを変化させる方法を用いた。 歩 行中の行動調整課題として, 水平棒を手で把持した状態, もしくは頭部や体幹部に 取り付けた状態で, 棒の先端を歩行路の途中に吊り下げたドアに固定したターゲッ ト (本研究では空間軸と表現) に合わせるように歩行軌道を調整することを参加者 に求めた。 もしダイナミックタッチで得られた情報が歩行軌道の調整にも利用され るならば, 棒に取り付けた錘位償を把持部から遠ざけると, 参加者は実際の先端位 置をより遠くに知覚し, 錘が把持部に近い棒を合わせる時に比べて相対的に遠ざか る方向 (空間軸・ ドアからは遠ざかる方向) に歩行軌道を調整すると予想した。 ま た, 手以外の身体部位で同じことをおこなっても, 手の場合と同じ様式で歩行軌道 を調整すると予想した。
本研究では, 目的達成のために4つの実験を行った。 先行研究におけるダイナミ ックタッチでは, 参加者が座位や立位の状態 (いわゆる静止状態) で検証してい
る。 そこで本研究の第1実験では, 歩行時と立位時の両条件下で実験を行い, 歩行 時にも立位時と同様, ダイナミックタッチで得られた情報が歩行調整に利用される かを検証した。 実験の結果, 水平棒を手に持った状況と, 頭に取り付けた状況のい ずれにおいても, 棒に取り付けた錘の位置を把持部から遠ざけることで, 棒を長い
と知覚した時に生じる歩行調整 (空間軸・ ドアか遠ざかるような調整) が行われ た。 また, 静的な棒先端位置の調整, 並びに棒の長さの回答も錘の位置の操作に応 じて行われた。 この結果は, ①立位時と同様, 歩行中の軌道調整にダイナミックタ ッチで得られた情報が利用されたこと, さらに, ②手, 碩部のいずれにおいてもダ イナミックタッチの情報が利用可能であったことを示唆する。
なお, 第1実験では以上の結果に加えて, 水平棒を伴う身体部位が手なのか頭部 なのかによって, 棒先端の調整位置が異なった。 この結果に対して, 本研究では2 つの解釈を考えた。 第1に, 頭などの物体を伴う経験が少ない部位では, ダイナミ ックタッチを手のように行動に利用することが困難であった可能性である。 第2
に, ダイナミックタッチそのものは頭部でも同様だが, 頭部は, 取り付けた棒が他 部位より障害物 (本研究における空間軸を設置していたドア) と接触するリスクを 考慮し, ドアから遠ざかるように行動した可能性である。 2つの解釈のどちらがより 妥当かを検証するため, 第2実験では, 水平棒を体幹部に取り付ける条件を加えて 検証を行った。 体幹部は頭部と同様, 物体を伴い行動する経験が少ない身体部位と して選定した。 もし第1の解釈が正しければ, 手条件にのみ, 頭部条件や体幹部条 件と異なる歩行調整が行われると予想した。 逆に第2の解釈が正しければ, 頭部条 件のみ, 手条件や体幹部条件と異なる歩行調整が行われると予想した。 実験の結 果, 第2 の解釈を支持する結果が得られた。
仮にこの第 2の解釈が正しい場合, 頭部であっても歩行調整時に障害物との接触 のリスクがない条件下では, 頭部条件での歩行調整の特異性は消失することが予想 される。 そこで第3実験では, 空間軸とドアとの距離を第1· 2実験よりも20 cm遠 くし, ドアと棒先端の接触リスクが極めて少ない状況下で実験を行った。 その結 果, 予想とは異なり, 接触リスクが極めて少ない状況でも, 第1· 2実験の結果は再
現された。 この結果から, 頭部に物体を伴う状態での歩行調整の特異性は, 接触リ スク以外の要因を考える必要が生じた。
そこで次に考えたのが. 頭部における空間知覚特性の影響であった。 空間的注意 をつかさどる大脳右半球では, 左半球よりも空間知覚に優位性があるため, 右半球 の対側である左空間に注意のバイアスがかかりやすいことが知られている。 第1-3 実験までの結果は, 右空間の空間軸に対して棒先端を合わせる課題で得られたもの であった。 仮に頭部において他 部位より空間知覚における左方向への偏位傾向が大 きかった場合, その影響で左方向へと棒の先端位置を調整していた可能性がある。
もしこの考えが正しい場合, 空間軸を左側に設置した場合にはその影響は消失し,
手でも頭部でも同位置に調整を行うと予想した。 第4実験を検討した結果, 左に空 間軸を設置した条件では, 頭における歩行調整の特異性は消失した。 すなわち, 頭 における特異的な行動調整は, ターゲットの空間位置に依存する現象であり, 物体 知覚や歩行調整に内在する問題ではないことが示唆された。
以上の4つの実験結果に基づき, 本研究は, 様々な身体部位において物体を伴っ た状態での歩行調整には, ダイナミックタッチという知覚プ ロセスによって得られ た情報が利用されることを明らかにした。 また, 第1-3実験においては, 頭部条件 では特異的な歩行調整が行われたが, この行動はターゲットの空間位置によって低 減することから, この影響は, 頭部の右空間に特異的な知覚特性の影響による可能 性が示唆された。 そのため, 様々な身体部位においてダイナミックタッチで得た情 報そのものは頭部や体幹部でも同程度に歩行調整に利用されていることが示唆され
た。
目次
第1章 緒言 ..............................................................................................8
第2章 本研究の理論的・方法論的背景…•...10 第l節 ダイナミックタッチに基づく物体の知覚 .........................................10
1-1 物体の形体に関する知覚 ................................................................10 1-2 物体の空間中の向きに関する知覚 ...................................................13 1-3 ダイナミックタッチにおける慣性モーメントの役割 .......................….13 1-4 ダイナミックタッチの生理学的機序 .......................................…••....15 1-5 様々な身体部位における物体の知覚 .............................................…15 第2節 身体位置との関係・行動判断におけるダイナミックタッチの貢献…...18 2-1 物体と身体との位置関係に関する知覚 .............................................18 2-2 ダイナミックタッチの情報の行為可否判断への利用 ........................…19 第3章 本研究の目的, 研究方略, 全体の構成…•...........................................21 第4章 第1実験:歩行中におけるダイナミックタッチの関与の検討
一歩行中の棒先端一致課題と静的な知覚課題による検証………•...·….25 第l節 目的 .........................................................................................25 第2節 方法 ........................................................................................26 2.1 対象 ........................................................................................26 2.2 実験装置および使用器具 .............................................................26 2.3 実験課題 ..................................................................................29 2.4 手続き···.) 2 2.5 データ処理および統計解析...........................................................33 第3節 結果 .........................................................................................34
第4節 考察 .........................................................................................40
第5章 第2実験:身体部位間での行動特性の相違に関する検討
一体幹部条件との比較による検証一 ................................................43 第1節 目的 .........................................................................................43 第2節 方法 ........................................................................................44 2.1 対象 ........................................................................................44 2.2 実験装置および使用器具 .............................................................44 2.3 実験課題 ...................................................................................45 2.4 手続き .....................................................................................45 2.5 データ処理および統計解析 ..........................................................45 第3節 結果 .........................................................................................47 第4節 考察 .........................................................................................53
第6章 第3実験:頭部における保守的調整の影響に関する検討 ...……….55
第1節 目的 .........................................................................................55 第2節 方法 .........................................................................................55 2.1 対象 ........................................................................................55 2.2 実験装置および使用器具 ............................................................56 2.3 実験課題 .................................................................................56 2.4 手続き .....................................................................................57 2.5 データ処理および統計解析 ..........................................................57 第3節 結果 .........................................................................................59 第4節 考察 .........................................................................................64
第7章 第4実験:頭部の空間知覚における左偏位傾向の影響の検討.………..65
第l節 目的 .........................................................................................65
第2節 方法 .........................................................................................66 2.1 対象 .................................................................................................66 2.2 実験装置および使用器具 .............................................................66 2.3 実験課題 ..................................................................................67 2.4 手続き .....................................................................................67 2.5 データ処理および統計解析 ..........................................................68 第3節 結果 .........................................................................................69 第4節 考察 .........................................................................................77 第8章 総合考察 ......................................................................................79 第9章 結論 ............................................................................................88 参考文献 ..................................................................................................89 謝辞 ........................................................................................................93
緒言
歩行中には, 身体の各部位が荷物や道具により, 動作に必要なスペースが一時的 に拡張した状況がある。 しかしながら, 我々は, こうした物体を伴った行動中であ っても, 必要なスペースに応 じて行動を調整することができる(Higuchi,Seya, &
Imanaka, 2012; Stefanucci & Geuss, 2010b)。 こうした行動中には身に着けた物体の位置 を常に視認することはできない場合もあるため, その時には物体に触れた部分の触 覚情報などを行動調整する際の情報として利用する必要があると考えられる。
触覚情報の中でも, 特に物体の形状や空間位置を知覚する際には, ダイナミック タッチと呼ばれる触覚プ ロセスが利用される。 ダイナミックタッチでは, 身体と物 体との間に発生する慣性モーメントが主に利用される。 そのため, 錘をつけた棒を 振ると, 錘位置が回転中心から遠いほど, その棒は長く知覚される(Solomon and Turvey 1988)。 こうした現象は, 手に特有のものではなく, 頭部や体幹部においても
この慣性モーメントに基づき長さの知覚が行われる(Palatinus et al 2011; Wagman et al 2017)。 また, 物体と自身の身体位置との相対的な位置関係を知覚する場合や, 物 体を保持した状態で自身の可能な行為を判断する際にも, この慣性モーメントは知 覚判断に影響を与える(Pagano,Kinsella-Shaw, Cassidy, & Turvey, 1994; Wagman &
Taylor, 2005)。
これらのことから, 身体の各部位ではダイナミックタッチで得られる情報から物 体位置を知覚するだけでなく, 行動を判断する際や, さらには実際の行動を調整す る際にも利用している可能性がある。 しかしながら, これまでのダイナミックタッ チの研究は, 座位や立位など静的な場面での検証に留まり, 歩行中においても実際 にダイナミックタッチで得られた情報が利用できるのかについては明らかでない。
そこで本研究では, 様々な身体部位に物体を伴った状態で歩行調整する際に, ダイ
ナミックタッチで得た情報を利用しているのかを明らかにする。 実験では, 静的な 状況と同様に, 歩行中においても棒に取り付けた錘位置に基づいて歩行調整が行わ れるのかを検証する。 また, 頭部や体幹部に水平棒を固定して歩行した場合, ダイ ナミックタッチで得られた情報を手と同程度に利用しているのかを検討する。 これ らの検討を通して, 様々な身体部位に物体を伴う中での歩行調整において, ダイナ ミックタッチで得られた情報が利用されていることを明らかにする。
,
第2章 本研究の理論的・方法論的背景
本章では, 本研究のテーマである触覚情報に基づく物体の知覚, ならびにその情 報を自身の身体位置との関係性・ 行動の判断に利用していることを示した研究を紹 介し, その理論的背景と研究手法について概説する。 これらの先行研究を通して,
実際の行動調整においても, ダイナミックタッチに基づいて知覚した物体の情報が 利用される可能性を示す。
第1節 ダイナミックタッチに基づく物体の知覚
我々が物体を知覚する際には, 視覚的な情報だけでなく, その物体に触れること によって得られる触覚情報も利用している。 こうした触覚情報は, その物体の形体 的特性に関する多様な情報を提供している。 特に, 物体を操作・ 保持することによ り発生する抵抗に基づき, その特性を知覚するプロセスはダイナミックタッチと呼 ばれており, 物体知覚において主要な役割を担うことが知られている(Turvey, 1996)。
1-1 物体の形体に関する知覚
我々はダイナミックタッチを利用することで, 手にした物体を見ずともその形状 を知覚することが可能である。 例えば, 手に持った棒を振るだけでも, その棒の長 さの違いを識別することができる(Solomon& Turvey, 1988)。 Solomonらば参加者の
右手をパーティションで隠した状態で6種類の長さの棒を把持してもらい, その棒 を振って棒の長さを回答してもらった(医l左)。 その結果, 実際に振る棒が長くな るにつれて, 参加者は棒を相対的に長く知覚することがわかった(図l 右)。 この結 果は, 物体の視覚情報が得られない中でも, 物体を動かした時に得られる触覚情報
によって, その物体の特性を知覚できることを示唆している。
ダイナミックタッチは棒の全体的な長さだけでなく, その他にも様々な特性を知 覚する際に利用されている。 例えば, 棒の把持部から一部分の長さだけを知覚する 場合も, 実際の長さに合わせて棒の長さを知覚する(Carello,Santana, & Burton, 1996)。 長さ以外にも, 物体の幅や高さといった特性も知覚することが可能である
(Turvey, Burton, Amazeen, Butwill, & Carello, 1998)。 また, 数種類の異なる形状の物体 の形状を識別することも可能である(Burton,Turvey, & Solomon, 1990)。 以上のことか ら, 様々な物体の形体を知覚する際の知覚プロセスとして, ダイナミックタッチは 多くの場面で利用されていると考えられる。
1、2
-E)
H1DN310UJ>-13H3d
9
.
.
.
” ••
•• [' ••
,.
尻,ー"|£’
9.
, ••
99
, 9,•
1.o
EXPERIMENTER'S VIEW 0.8
0.5 0.2
EXPERIMENT 1 (AVERAGE)
y • 0.100 + 0.7心x R-1.00 0.o 0.0 0.2 0.5 C.8 9.o 1.2
SUBJECT'S VIEW ACTUAL LENGTH (m)
図1:棒の長さ知覚課題(Solomon& Turvey, 1988 第1実験)
左:実験方法。 参加者は, 右手をパーテ ィションで視野遮蔽した状態で 6 種類( 0 .30 5�1.219 m)の棒を把持し, その棒を振って長さを予想した。
その後左手のケーブルを用いてパネルを操作し, 把持した棒先端位 置に合わせることで回答を行った。
右:各棒の長さにおいて回答した長さの平均値プ ロット, ならびに回帰 直線。 振った棒が長くなるにつれ,
知覚した。
参加者はその棒を相対的に長く
1-2 物体の空間中の向きに関する知覚
ダイナミックタッチは, 把持した物体の長さといった形体的特徴だけでなく, そ の物体がどこを向いているのかといった方向に関する情報を知覚する際にも利用可 能である。 Turveyらは, 参加者の右手を隠した状態で柄の付いたL字型の棒を8種 類の角度(0�315゜ ) に傾けて把持してもらった。 そして, 棒の先端 部の柄の傾き を変えずに振ってもらったのち, 反対側の手で棒の柄の部分が垂直方向からどの程 度傾いているか回答してもらった。 その結果 , 8種類のうち7種類については, 実際
に棒の傾きに対応して参加者の知覚した棒の傾きも変化した(Turvey,Burton, Pagano, Solomon, & Runeson, 1992)。 また, こうした傾きに対する知覚は, 物体の形状が変わ った場合でもその物体の形状に応じて知覚が行われる(Pagano& Turvey, 1992)。 これ らの結果 は, 視覚的に物体の情報が得られない中で, その形体(Solomon& Turvey, 1988)だけでなく, 空間的な位置関係についてもダイナミックタッチにより知覚でき
ることを示唆している。
1-3 ダイナミックタッチにおける慣性モーメントの役割
ダイナミックタッチに基づいて物体を知覚する際にその知覚に大きな影響を与え るのが, 物体と身体の接触部との間に発生する抵抗, すなわち“慣性モーメント”で ある。 慣性モーメントとは, ある軸周りを回転する物体とその回転中心との間に発 生する慣性の大きさ(物体の動かしやすさ/にくさ) である。 興味深いのは, 物体 の知覚課題において, 知覚者の回答値にこの慣性モーメントの変化が直接的に影響 を与えることである。 例えば, 棒に錘を取り付け, その錘の位置を把持部から遠ざ ける操作を行うと, 同じ長さの棒であっても参加者はより棒を長い棒を振っている
と知覚する(Solomon& Tur vey, 1988)。 通常, 物体が見える状況では視 覚的には物体 の重 さや 長さは変化していないため, 錘の位置を変えても把持部にかかる抵抗感 が 大 きいだけで長さとしては同一のように知覚されるはずである。 一方で, 視 覚が利 用できない状況下では, 質量 ・ 棒の長さが変化しない場合にも, 慣性モーメ ン トの 変化によって参加 者の主観 的な棒 の長さ知覚も変化したことを示唆している。 ま た, こうした現象は, 棒の全 体の長さを知覚する時だけでなく, 棒の一部分の長 さ, 幅 , 重 さ, ならびに傾きなどの知覚につ いても生じ, 錘位圏 を操作することに よってその形体的特性・ 空間的特性の知覚も変化する(Car ello et al. , 1996; Kloos &
A maz een, 20 02; Turvey et al. , 1998) 。 こ のことから, ダイ ナミックタッチでは, 物体を 振ることによって慣性モーメ ン トの情報に基づいて, 様々な物体の特性を知覚 し て いると考えられている。
慣性モーメ ン トがダイ ナミックタッチにおいて重 要とされる背景には, その物理 的性質 が関係している。 棒を振る場合には, 振幅速度, 範 囲 などが絶 えず変化す る。 しかしながら, 慣性モーメントは, 回転軸が一定であれば, 回転運 動中におけ る物体の質量 分布 とその回転中心との距離によって一定になるため, 動作による影 響 を受 けにくい。 実 際の検証でも, 棒の振り動作の振幅固期 を変えた場合 でも, 同 じように棒の長さは知覚されることが確 認されている(Solomon& Tur vey, 1988)。 そ のため, ダイ ナミックタッチでは, 棒を振るなかで, 時間変化しない情報である慣 性モーメ ン トを抽 出 することによって, 物体の特性の変化を安定して知覚している と考えられている(T ur vey,1996; 佐 々木 & 三嶋, 20 01)。
1-4 ダイナミックタッチの生理学 的機序
ダイナミックタッチには, 通常の触覚プ ロセス とは異なり, 物 体を保持したり,
動かしたりといった動作が伴う。 そのため, その知覚には, 筋紡 錘 . 腱紡 錘などの 感 覚受容器 の関与している“筋感 覚’' が主に利用されると考えられている(Carello, Silva, Ki nsella-Shaw, & Turvey, 2008; Turvey & Carello, 2011)。 特に, 物体と身体との間
に生じる慣性モーメントは, 動作中の筋 ・ 腱 の張力 を変化させるとともに, 棒を振 る運 動に対する筋 出 力 の調整 にも影響を与える。 こうした動作と感 覚入力 の関係性 から物 体の特性に関する情報を抽 出 していると考えられる。 先行研究においても,
実際 に棒を振る時の手関節屈筋 , 伸 筋 の筋活 動量 を測定したところ , 棒の慣性モー メントが大 きくなるにつれてその筋活 動量 も増 加した(池 田 , 清水, 坂 本, & 塩 田 , 2008)。 さらにこの実験内 で, 棒の代 わりに力 覚生成装 置を振ってもらい, その動作
中にジ ャ イロス コープ によって疑似 的な慣性モーメントを提示 した。 すると, 参加 者は抵抗が変化に応 じて異なる振りに く さを知覚した。 これらの結果は, 身体と物 体との間に生じる抵抗 が動作中の筋活 動, また, それに伴う知覚に影響 を与えるこ とを示 唆する。 そのため棒振り動作中には, 物理的入力 を筋紡 錘が受 け取って筋 出 力 を調整 する過 程 で得られる慣性モーメントに基づいて, 物体の特性を知覚してい
ると考えられる。
1- 5 様々な身体部位における物体の知覚
ダイナミックタッチの興味深 い特徴 の1つに, 手以外の身体部位でもその物 体を 知覚できることが挙 げられる。 例 えば, 足 部や体幹部に棒を取り付けてその状態で 棒を振ってもらった場合でも, 棒の長さや錘位置に応 じて長さの知覚が行われる
( H aj nal, F onseca, H arrison, Kinsella-Shaw, & Carello, 20 0 7; P alatinus, Carello, & Turvey, 2011)。 さらに, 頭部のように日 常的に物体を操作したり, 物体からの抵抗を感 じる 経験のほとん どない部位であっても, 手と同程度の長さ知覚が可能である( W agman, L angley, & Higuchi, 2017)。 W agmanらは, 3種穎 の棒(35 , 50 , 65 cm)に, 全 体の 50% ,
70% , 90% の長さの位置に錘を取り付けた計 9種類 の条件 で棒の長さを回答させた。
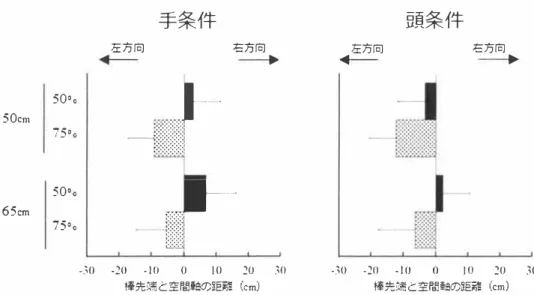
その結果, 頭部であっても, 錘の位償が固定 部から遠ざかるほど棒を長く知覚し た, さらに, 身体部位間で比較 した時 に は, 頭部でも手と同程度に棒の長さを知覚 していた ( 図2)。 これらの結果は, ダイナミックタッチが身体部位 ご との違い ( 棒 を振る際の振幅 ・ 速度・ 方向といった動作, 感 覚の鋭敏 性さなど) に依存せず, 物 体の特性を知覚する際に利用 されることを示 唆している。
^ g 1 00 ロ 0.5 Hand
� 80 ロ 0.7
..c ↑ c ·
3 c;: 60- ロ0.9
"2
翌 40
゜
c'.:, る 20゜
35 cm 50 cm 65cmRod Length (cm)
(B) 1 00
贔←
一↑・←
^r
―
, E
一←、. ‘ □0.5 80 口0.7
『
40 60 ロ09 20Head
岱
゜
35 cm 50 cm 65 cmRod Length (cm)
図 2 : 手と頭部における棒の長 さ知覚課題(W agman et al. 20 17 第2実験)
左: 参加者は, 棒を視 認できないよう背 部に手を回 した状態で把持す る
(左上図) , もしくは, ヘルメットの後 方に固定した状態で棒の長 さ 知覚課題を行った (左下図 ) 。 参加者は, それぞ れの部位で振ったの ち, その長 さを回答 した。 手 ・ 頭部のどちらの部位も, 長 さ35 , 50 , 65cm棒に, 把持部から棒の末 端までの間の 50 , 70 , 90% の位置に錘を 固定した計 9種類 についてそれぞ れ回答 を行った。
右:参加者が回答 した棒の長 さの平 均値(右上:手条件 , 右下:頭部条件) 。 手 ・ 頭部どちらの身体部位でも, 実際の棒の長 さが長くなるにつれ,
また錘位置が把持部・ 固定部から遠ざかるにつれ, より長 く知覚した。
また, 身体条件間 での比較 では有意 な主効果は認められず, 手でも頭 部でも知覚の精度 はおよそ同程度 であった。
第2節 物体一 身体位置の関係 ・ 行動 判断におけるダイナミックタッチの貢献
第1節 でまとめたように, 主にダイナミックタ ッ チは物体の特性を知覚する際に 利用する触覚プ ロセスとして研究がなされてきた。 このほか, 先行研究が示したの は, ダイナミックタッチによって得られる情報が物体自体の知覚だけでなく, 知覚 者と物体との関係性や物体を伴いながら行動 する際の判断にも利用されることであ る。 これらの研究成果は本研究テーマとも関連 性が高 いことから, 第2節 で詳 しく 説明する。
2-1物体と身体との位置関係に関する知覚
ダイナミックタッチという知覚プ ロセスが提供する情報は, 物体の形体やその位 置関係に関する情報だけではない。 物体を把持 している自身の身 体との位置 に関係 ついても, ダイナミックタッチで得られる情報に基づいて知覚が行われる。 Pagano らは, 参加者の右手をパーテ ィショ ン で隠 した状態で, 棒を垂直 方向に向けてもた せ, 毎 回 あらかじめ決 めた位置を把持 して棒を振ってもらった。 その後, その棒を 把持 した位置を左手側に固定した棒で再 現してもらった。 その結果, 棒を把 持する
位置を変えると, それに合わせて参加者の知覚する把 持位置も変化した(Pagano et al. , 1994)。 この結果は, 棒の長さ知覚だけでなく, 物体と自身との把持 位置の関係もダ
イナミックタッチにより得られた情報に基づいて知覚していることを示唆する。
さらに, こうした物体と身体との相対位置を知覚する際にも, 慣性モーメ ン ト が 知覚に影響 を与える。 Paganoらは先ほどの実験で, 棒の片 側に錘を取り付けた。 そ の結果, 自 身の把 持位置の知覚は, 錘の取り付けたのと反 対方向に偏って知覚した (Pagano, Carello, & Turvey, 1996; Pagano et al. , 1994)。 同様に, 自 身の腕 の向きを知覚
する場合にも, 錘を取り付けた方向に腕 の向きが{扁 って知覚される(Pagano& Turvey, 1995) 。 すなわち, 物体と身体がどのような位置 関係にあるかを知覚する際に, 我々
は物体との間 に生 じる慣性モーメントを主に利用して知覚を行っていると考えられ る。
2-2 ダイナミックタッチの情報の行為可否 判断への利用
ダイナミックタッチで得 られる情報は, 物体を伴って移 動する場面 での自身の行 動判断にも利用される。 Wagmanらは, 参加者に手元 が見えない状況下 で複数 の長さ の水平棒を把持してもらい, 前 方の幅 90cmの隙間 を歩いて通れるか判断をおこなっ てもらった。 その結果, 棒の長さが長くなると, 参加者の通れないと判断する回数 も増 加した(Wagman& Taylor, 20 0 5) 。 さらに, この第2実験では, 水平棒に錘を取り 付けて同様の通過 可否 判断をおこなった。 その結果, 錘位置が回転中心から遠くな ると参加者が通れないと判断する回数 も増 加した。 こ れらの結果は, 錘位置が回転 中心から遠い棒を持って判断する場合, 錘が回転中心から近い棒に比べて横幅 の広 い棒を把持していると知覚し, その情報をもとに 隙 間の通過 可否 を判断したことを 意味 する。 すなわち, 水平棒を保持 して歩行する場面 を想定した時に, 参加者はダ イナミックタッチで得た情報に基づいて自身の行動に必要なスペースを計算 し, 行
動の可否 判断を行っていることを示唆する。
実際の行動場面 においても, 物体 を身に眉 け た場合には行動に必要となるスペー スを考慮して動作を調整することが求められる。 こうした状況下 では, 物体の形 体・ 空間位置 に関する情報を, 歩行軌道の変更 などの実際の行動に利用する必要が ある。 少なくとも, 視 覚が制限されていない状況においては, 物体の位置 を加味 し た行動の調整が行われることが分かってい る。 例えば, 手に棒を把持して目標地点
ま で移動 し , ターゲ ッ ト ヘ 到達動作 を 行 う 場合, 棒 の 長 さ に 基 づ い て 到逹動作 を 開 始 す る 位置 を 調整す る (Bongers, Michaels, & Smitsman, 2004)。 ま た , 手 , 体幹部, 頭 部 の 各部位 に 荷物 を 身 に 着 け た 状況で も , 広 が っ た 分 の ス ペ ー ス に 合 わ せ て 狭 い 隙 間 の 通 り 抜 け 動作 や , バー の く ぐ り 抜 け動作 を 調整す る (Franchak & Adolph, 20 1 4;
Higuchi et al., 20 12; Stefanucci & Geuss, 20 1 0a)。 こ の よ う に , 手以外 の 様 々 な 部位 に お い て も , 身 に 着 け た 物体 の 形体 ・ 空 間位置 を 利 用 し , 行動 の調整 が な さ れて い る 。
こ れ ら は , 視覚 も 利用 で き る 状況下 で の 検証 で あ る が, 実 際 の 行動 中 は , 障害物 な ど の 情報 に も 目 を 向 け る 必要 が あ り 物体位置 を 視認 で き な い 可能性 が あ る 。 そ の た め , 物体 を 伴 っ て 行動す る 場面 に お い て , 身 体 の 各部位で は ダ イ ナ ミ ッ ク タ ッ チ で 得 ら れ た 情報 を 利 用 し て 物体位置 を 知 覚 し , さ ら に そ れ ら の 情報 に 基づ い て 行動 を 調整 し て い る 可能性が あ る 。 特 に , ダ イ ナ ミ ッ ク タ ッ チ で得 た 情報 は , 物体 と 身体 と の 位置関係, 行動 の 可否 判 断時 に も 利用 さ れ て い る こ と を 考 え る と , 実際 に 行動 を 調整す る 際 に も 得 ら れ だ情報 に 基づい て そ の 調整が行わ れ る 可能性が あ る 。
第 3 章 本研究 の 目 的 , 研究方略, 全体 の 構成
こ れ ま で の 先行研究 か ら , ダ イ ナ ミ ッ ク タ ッ チ が物体 の 特性, な ら び に 自 身 の 身 体 と の 位 置 関係 の 知 覚 , さ ら に 物体 を 身 に 篇 け た 状態 で 自 身 の 可能 な 行動 を 判 断す る 際 に も 利用 さ れ る こ と は わ か っ て い る 。 し か し な が ら , 物体 を 伴 う 状況下 で実際 に 歩行調整 す る 際 に , ダ イ ナ ミ ッ ク タ ッ チ で得 ら れ た 情報が利用 可能 で あ る の か に つ い て は 明 ら か で な い 。 通常, 動作 中 に は , 触覚刺激 に 対 す る 感受性 は低下す る (Juravle, Deubel, Tan, & Spence, 20 1 0)。 こ う し た 状況下 に お い て , 静的 な 状況下 と 同 様 に ダ イ ナ ミ ッ ク タ ッ チ で得 た 情報 に 基づ い て 行動調整 で き る か に つ い て は 不 明 で
あ る 。 さ ら に , 歩行 中 に は 各身 体部位が異 な る 動作 ・ 役割 を 担 う 。 例 え ば, 頭部 の 場合, 歩 行 中 も 安定 し て お り 関節運動 が 少 な い 部位 で あ る (Bril & Ledebt, 1 998; Pozzo, Berthoz, & Lefort, 1 990)。 ま た , 頸部筋群 の 固有感覚受容器 は , 全身 の 姿勢制御 や歩 行 中 の 進行方 向制御 に も 関与 し て い る (Ivanenko, Grasso, & Lacquaniti, 2000; Schieppati, Nardone, & Schmid, 2003)。 こ の よ う な 部位 の 特殊性 を 考慮 す る と , 行動調整時 に 知 覚情報 を 利用 す る 過程 に お い て , 身体部位 に よ っ て は 異 な る 知 覚, 行動調整 が 行 わ れ る こ と も 考 え ら れ る 。
そ こ で本研究 で は , 様 々 な 身体部位 に お い て 物体 を 伴 っ た 状態 で歩行調整す る 際 に も , ダ イ ナ ミ ッ ク タ ッ チ で得 ら れ た 情報が利用 さ れ る の か を 明 ら か に す る 。 こ の 目 的 を 達成す る た め の 手法 と し て , ダ イ ナ ミ ッ ク タ ッ チ で 得 た 情報 を 利 用 し , 実際 の 歩行軌道 を 調整 す る 課題 を 行 う (歩行 中 の棒先端一致課題) 。 こ の 課題で は , 歩行 路 の 途 中 に タ ーゲ ッ ト (以下, 空 間軸) を 設定 し , 参加者 に 水平棒 を 保持 し て 歩
き , そ の 途 中 で棒先端 を 目 標 と な る 空 間軸 に 合 わ せ る よ う 求 め た 。 こ の 課題 中 , 錘 位置が把持部 か ら 遠 い (慣性モーメ ン ト が大 き い) 水平棒 を 保持 し て 歩行 を 行 っ た 際 に は , 棒 を よ り 長 く 知 覚 し , そ の 位置 を も と に 歩行調整す る の か を 検証 し た 。 ま
た, この課題を手以外 の部 位に棒を固定して行った場合においても, 手と同位置に 棒先端位置を調整す るのかについて検証を行った。
本研究では計 4つの実験 を行った。 各実験の流 れは以 下の通りである (図3)。
①歩行調整にもダイナミ ッ ク タ ッ チで 得た情報が利用可能か
②様々な部位においてダイナミッ ク タ ッ チ で1号た情報を同程度に利用 しているか
第 1 実験 歩きながら棒先端を 空間軸 に合わせる課題
ダイナミックタッ チの関与を示唆 手と頭響では異なる歩行調整-99.
第2実験 物体の情報を使っ て行動 した経験の差によるものか
⇒体幹部条件を加えた比較検証
.
第3実験 同一方法での検証
: 現象の再現性
手 ・ 頭部での比較
頭部では ドアと棒の接触 リスクを避けていたのか
⇒字間軸と ドアの距離を広げた条件での検証
•
第4実験 頑部の空間知覚における左偏位の影蓄があ っ た か
⇒ 対側の字間に字間軸を設償した条件での検証
図3 実験 の流 れ
本研究では, 4 つの実験を通して, 2 つの点 に済 目した実験 を行った。 検証点 の 1 つめは, ダイナミ ッ クタ ッ チで得られた情報が実際の歩 行調整に利用可能である かであった。 検証点 の2 つめは, ダイナミ ッ クタ ッ チで得られた情報を, 手以外 の 身体部 位でも同程度に利用して歩 行調整を行っているのかであった。
まず第 1 実験では, 静 的な状況下での物体知覚と同様に, 歩 行調整にもダイナミ ッ クタ ッ チで得らえた情報が利用されているのかを明 らかにす るため, 本実験 では 歩 行中に棒先 端を合わせる課題 (歩 行中の棒先端一致 課題) , ならびに静 的な知覚課 題として, 横移動 で棒先端を合わせる課題 (静 止立位での棒先端一致 課題) , その場
で棒の長さを回答す る課題 (棒の長さ知覚課題) の計 3課題を行った。 このとき,
静的な状況における物体知覚と同様に, 歩行調整にもダイナミックタッチで得られ る情報を利用しているのかについて検討 した。 さらに2つ目の検証点 についての検 証に関して, 手条件・ 頭部条件の2部位を設定して行い, 碩部と手の物体知覚・ 行 動特性についての比較 検討を行った。
第2-4実験は, 第1実験の結果を受 けて構成した。 1つ目 の検証点 については, 第 1 実験で歩行調整の際 にもダイナミックタッチで得られた情報が関与することが示 唆された。 そのため, 第2 実験以 降 では , 同じ棒の長さ・ 錘位置の条件を用いて,
同様の現象が再 現されるのかを検討し た。
2 つ目の検証点 については, 第1 実験において, 手と頭部において異なる歩行調整 が行われた。 そこで第2実験以 降 では, 第1実験で生じた身体部位間での歩行調整 の違いが, 手・ 頭部のどちらに特異的な行動特性であるのか, またその理由 が何 に よるものなのかについての検証を行った。
第2 実験ではまず, 行動調整の特異性が手・ 頭部のどちらにあるのかを明 らかに するため, 体幹部条件を加えた3条件による比較 検討を行った。
第3実験では, 頭部において他 部位よりも障害物 (空間軸を固定したドア) との 接触リスクを考慮した歩行調整が行われていたのかを明 らかにすることを目的とし た。 ここでは, 空間軸とドアとの距離を今 までの条件より 20 cm広 げ, ドアとの接 触リスクがより少ない状況下 で, 頭部における特異的な歩行調整 (空間軸・ ドア か ら離れる方向への調整) が解 消 されるのかを検討した。
第4実験では, 頭部における歩行調整の特異性が頭部における空間知覚における 左偏位の影響であったかを明 らかにすることを目的とした。 左空間に空間軸を設置 し, 歩行調整を行ってもらった。 この課題において, 右空間で見られた頭部の歩行 調整における特異性が, 左空間では頭部における特異的な行動特性が消失するのか を検討した。
以上の4つの検証 を通じて, 本実験では, 様々な身体部位に物体を伴う状態で歩 行調整する際に, ダイナミックタッチで得 られた情報が利 用 されるのかを明らかに する。
第 4 章 第 1 実験 : 歩行 中 に お け る ダ イ ナ ミ ッ ク タ ッ チ の 関与 の 検討 一 歩行 中 の 棒先端一致課題 と 静的 な 知覚課題 に よ る 検証_
第 1節 目 的
第1 実険 では, 静的な状況下での物体知覚と同様に, 歩行調整にもダイナミック タッチで得られた情報が利用されるのかを明らかにする。 ここでは, 歩行中の棒先 端一致 課題, ならびに静的な知覚課題として静止立位での棒先端一致 課題, 棒の長 さ知覚課題の計 3 課題による検討を行った。 もし, 歩行調整においてもダイナミッ クタッチで得られた情報が利用されるならば, 水平棒に取り付 けた錘位置を把 持部 から遠ざけると, 錘位 置が把 持部に近い棒の時に比べてその棒先端位置をより遠く に知覚し, 実際の棒先端位置がより左側 (空間軸 ・ ドアからより遠ざかる方向) を 通過 するように歩行調整を行うと予想した (図4)。 また, ダイナミックタッチで得 た情報が各部 位において同程度に歩行調整 に利用されるなら, 手 で棒を把 持した場 合, 頭部 に棒を固定した場合のどちらも, 同じ位置に調整すると予想した。
―』—-=
50%Lの場合
- 』 —
75o/,Lの場合
実際
右
→
空間軸
左
←
予想 → 実際 →
奏
図4 ダイナミックタッチの情報に基づく棒先端の調整位置
第2節 方法
2.1 対象
実験参加 者は, 首都 大学東京 に在籍 する大学 生・ 大学院生 12名 (男 性 7 名 , 女 性 5名 ; 年齢 21.5歳 (中央値) , 範 囲 19 - 25歳 ) であった。 参加 者には, 事前 に参加 を 呼びかけ快諾 を得た。 実験前 に趣 旨 の説 明を行い, 参加 者に文 章で同意を得たうえ で実験を実施 した。 なお, 実験参加 者は, 参加 にあたる謝礼 として図書 カード10 0 0 円 分を受 けとった。 歩行・ バ ラ ンス障害, 視覚異 常のないものを参加 対象者とし た。 参加者の利き手は右利き11名 , 左利き l 名 であった (エ ジンバ ラ 利き手テ スト による判定) 。 本研究は, 首都 大学東京倫 理審査委員 会 の承 認を得て実施 した (承 認 番号 :H29 - 98)。
2.2 実験装 置および使 用器具
首都 大学東京 の歩行実験室 (6.7 m X 4.9 m) にて実施 した。 実険 では, 歩行路
(長さ 6 m X 幅 1. 8 m) のマットを床 に固定したものを使 用した。 マットの端か ら1 m, 4 m, 5 mの3か所 にはビ ニールテープ を貼 付し, それぞ れスタート地点 , ターゲット地点 , ストップ地点 とした。
歩行通路の3 mの位置に, 黒 い塩 ビ板 でできたドアを 2枚 吊 り下げた (床面 から 2 mの位置に 60 .5cm x 175.5 cm) ( 図5A) 。 ドアは上部 に取 り付けたモーターで自走 可能 であり, 課題に応 じて実験者がコ ン ピ ュータ にて制御 した。 なお, 左右パネル の開 閉 幅 は, 最小 0 cm (歩行路中央 ) , 最 大 118cm (歩行路最外端:片 側 59cm) で あった。
歩 行中の棒先端一致 課題 , 静止立位での棒先端一致 課題 (※後述 ) で使 用する実 験装 置として, 右側ドア の上端と下端にL 字型 のフ レーム を設置した (図5B )。 フ
レーム は, アルミニ ウ ム 製 の伸縮 棒 2本を使 用し, それぞ れが直 行するようテープ で固定した (縦 : 29cm, 横 : 37 cm)。 本実験 では, この L 字型 のフ レーム の垂直線 上を空間軸とした (ドア右端と L 字型 フ レーム 垂直線上までの距離 : 35cm)。 な
お, 上記 の課題中は, 左側ドア を取り外して実施 した。
実験で参加者が知覚する水平棒として, プ ラ スチック製 の錘を取り付けた木製 の 棒4種類 を使 用した。 水平棒の長さは, 50 cmと 65cmのものを使 用し, それぞ れ棒 左端から全 体の長さの 50%, 75% の位 置に錘がくるように固 定 した (図6, 表 l ) 。 この棒を頭部に固定する方法 として, プ ラ スチックシリンダーを後 端部側に接着 し たプ ラ スチック製ヘルメットを使 用した。 このシリンダーの中空部分 (直径 1.3 cm) に棒の左端部を差 し込 ん でボルトで固 定 した。 ヘルメットには布製 ベルトを取
り付け, 参 加者の下顎 部分で固定を行った。
手元 ならびに棒の位置を視 認することを避 けるため, 透 明プ ラ スチック製 のゴ
ーグルを用意し, その下端と側方端部分にスポンジ を取り付けた視 野遮蔽ゴーグル を作成した。 各参加者にはこのゴーグルを実験開始前 に着 用してもらった。
棒先端位置ならびに歩 行動作の解析 には13台 の三 次元 動作解析 カ メ ラ
(OQUS30 0, Q ualisys Sweden社製 ) を用いた。 なお, 動作解析 のサンプ リング周 波 数 は120Hz とした。 三 次元 動作解析 の測定対象となる反射マーカーは11個使 用し
た。 マーカー貼 付位置は, 下端L 字 フ レーム 3点 , 棒の先端と中央 部(2点 ) , ヘル メット頭頂 と左右端(3点 ) , 第 7 頸椎上(1点 ) , 左右の肩 峰 (2点 ) とした。
三開始地」_3lll
図 5 実験に使 用した装 置
A 棒の長さ知覚課題 にて使 用。 2枚 の黒塩 ビ版 で開 閉 式 の ド アを作 成した。 棒の長さ知覚課題 では, 参加者は知覚した棒の長さをこ
の ド アの隙 間幅 に合わせることで回答した。
B 歩行中の棒先端一致 課題, 静止立位での棒先端一致 課題 にて使 用 した。 左側の ド アは外し, 右側のドア上端と下端にL 字型 のフ レ ー ム を設置し, 地面 と直交 する直線上を空間軸とした。
図6 本実験で用いた水平棒の条件(4種類 )
実験には 50 cm の棒 (上2本) , 65c mの棒 ( 下2 本) を使 用。
錘は棒左端から全 長の 50%, 75% の位置に錘の中心がくるよう固定。
棒の長 さ 棒質量 棒直径 錘の幅 錘質呈 錘直径 錘位置 主慣性モーメ ン ト (kg/mり
m kg m m kg m m Ixx Iyy Izz
50cm(50%L ) 0 5 0 036 0 25 8 4xJ O -3 8 4x\O -3 O J x J o· 3 50cm(75%L ) 0 012 0 038 0 086 0 05 1 0 38 15 2XIO•3 15 2x10―3 O J x J O -3
65cm(50%L ) 0 36 15 9x J O― 3 1 5 9x IO -3 0 I x! O •3
0 65 0 048
65cm(75 %L ) 0 49 27 3x JO -3 27 3x! O -3 O l X l o -3
表1: 各水平棒の条件設定
主 慣性 モーメント(3軸方向の回転慣性 ) は, 参加者が水平棒 の左端 を把 持したと仮定, 上下(Ixx) — 左右(Iyy) ー 軸回転(Izz) 方向に棒 を振った場合の理論値。 なお, 50cm, 65cmのどちらの長さについて も , 錘位罹 が 75%条件の時に, 50% 条件に比べて主 慣性 モーメントが 大 きくなるような設定 とした。
2.3 実験課題
第1実験では3つの実験課題を実施 した。 3つの実験のいずれにおいても 手で棒 を 振る条件 ( 手条件: 図7A) , ならびに頭部 で棒 を振る条件 ( 頭部 条件:図7B) にて ダイナミックタッチを行っても らった。 従来 のダイナミックタッチの検証方法と同 じく, 水平棒を視認できないよう視野の遮蔽を行った状態で, 各身体部 位に棒を保 持/ 固定したのち, 参加者にその棒 を振っても らった(Wagman et al, 2017) 。 手条件 では, 参加者の右手を背面に回 し, 手背を背中の中央 付近 につけた状態で水平棒 左 端を把 持しても らった。 水平棒を振る際には, 棒をしつ かり握 り, 手背部 を背 中か ら離さないで振るよう求めた。 頭部 条件では, ヘルメットに取り付けたシリンダー に水平棒の左端を差 し込 ん で固定 した。 参加者は, 頭部 を動かして水平棒を振って も らうよう求めた。 手条件 ・ 頭部 条件には共通 の注意点 として, 極力 その部 位を使 って振るようにすること, 別 の場所 に当てて知覚しようとしないことを順守 するよ