1.は じ め に
脳神経系シミュレーションは,計算機の発展とともに 発展してきた.1952 年に,Hodgkin と Huxley は,電 位固定法を用いて,イカの巨大軸索の電気生理学的性 質を詳細に調べ,データに合う形でのモデルを構築し, 当時の最先端技術であった「手回し」計算機によりシ ミュレーションを実施し,驚異の精度で実験を再現した [Hodgkin 52].その成果により,1963 年のノーベル生 理学・医学賞を受賞している.彼らのモデルは,多少の 修正はあるものの,基本的には,60 年経った今も正し いとされる.システム神経科学の偉大な金字塔である. 以来,脳神経系の生理学と計算機シミュレーションは, 足並みをそろえて発展してきた.時代は下って,スーパ コンピュータ(以下,スパコン)によるシミュレーショ ンの時代になった.スイスの Blue Brain Project では, スパコン Blue Gene/L を用いて 1 万個の形のある神経 細胞のシミュレーションに成功(2007 年),また,米国 の大脳皮質シミュレータ C2 は,スパコン Blue Gene/P (Dawn スパコン)を 14 万並列で用いて 10 億個の細胞 のシミュレーションに成功し,計算機分野のノーベル賞 ともいわれるゴードン・ベル賞を受賞した(2009 年). ここで興味深いのは,前述の Blue Brain Project を率い ていたのが,Bert Sakmann 博士(1991 年,ノーベル 生理学・医学賞受賞)のもとで学んだ神経生理学者であ る Henry Markram 博士であることであろう.すなわち, シミュレーションは生理学者にとっての研究ツールなの である. さて,こうした脳神経シミュレーションの歴史の中 で,我が国の研究者による金字塔がある.福島邦彦先生 (NHK,当時)による視覚情報処理モデル,ネオコグニ トロンの提案 [Fukushima 1980](日本語論文の発表は 前年の 1979 年)である.ネオコグニトロンは,多階層 性などの哺乳類視覚系の解剖学的知見に基づき構築され たモデルであり,自己組織化学習することで高いパター ン認識精度を示した.現在,一般物体認識などで高い性 能を示し,再度の人工知能ブームの立役者となっている 深層学習(ディープラーニング)の元祖である.脳神経 系シミュレーションが多くの分野の起源になっていると いう周知の事実の,特筆すべき例としてここに記してお きたい. 著者は,理化学研究所が中核機関として実施された, 「次世代生命体統合シミュレーションソフトウェアの研究開発」(Next-Generation Integrated Simulation of Living Matter:ISLiM)において,脳神経系研究開発 チーム(2008 年 10 月∼ 2013 年 3 月)のリーダを務めた. その目的は,当時開発中であったスパコン「京」で動作 する脳神経系シミュレーションソフトウェアの開発と, 「京」を用いたシミュレーションの実施である.以下では, このプロジェクトの研究成果を紹介する.
2.ISLiM プロジェクトの概要
脳神経系は,物質基盤の上に情報基盤を構築した点で 特異な生命システムである.また,遺伝子・分子から脳 全体,個体集団に至る生命の階層の中で情報処理基盤が 構築されるため,必然的に多階層をなす複雑システムで ある.脳神経系の情報処理は,二つの異なる時定数をも つ様式に大別される.第一は,ミリ秒から秒の時定数を もち,外部からの入力刺激に基づき外部への働きかけ(運 動)を実施する刺激─運動変換過程であり,第二は,分 から時,日といった長い時定数をもち,環境に依存して, 刺激─運動変換自体を変化させる適応(学習)過程であ る.前者は,神経回路レベルでの電気生理学的な現象(神 経発火)がメインプレーヤであり,後者は,神経発火の みならず神経細胞内のイオンや酵素,受容体などの分子 がメインプレーヤとなる.脳神経系の情報処理は,常に 脳を取り巻く物理世界の時定数(すなわち実時間)にお いて実現される.したがって,入力から出力までをつなスーパコンピュータによる
脳神経系シミュレーション
Simulation of Neural Systems Based on Supercomputer
石井 信
京都大学大学院情報学研究科Shin Ishii Graduate School of Informatics, Kyoto University.
[email protected], http://ishiilab.jp/kyoto/
Keywords:
simulation, supercomputer, neural systems, parallel computing, hierarchical systems. 「脳神経系シミュレーション」いだ刺激─運動変換の実時間での再現(閉回路シミュレー ション),また,実環境において外的刺激にさらすこと で適応過程を再現する必要がある.これは,脳をつくっ て動かすことで脳を理解するという,計算神経科学の基 本理念の一つでもある. 以上のことから,我々は,脳全体レベルでの入出力変 換,およびその学習をシミュレーションのターゲットと し,そのための構成要素である神経細胞および神経回路 の動態の再現(神経細胞シミュレーション,神経回路シ ミュレーション)を目標に掲げた.前者について,860 億個ともいわれる数の細胞からなるヒトの脳全体のシ ミュレーションは,スパコン「京」であっても不可能で あることから,対象を限るものとし,哺乳類の視覚系と 無脊椎動物(特に昆虫)の嗅覚系を対象として,入出 力にわたる神経回路のシミュレーション研究を実施し た(哺乳類視覚系シミュレーション,無脊椎動物嗅覚系 シミュレーション).著者と市川一寿(東京大学)が神 経細胞シミュレーション,深井朋樹(理化学研究所)と Markus Diesmann(理化学研究所,当時)が神経回路 シミュレーション,黒田真也(東京大学),臼井支朗(理 化学研究所,当時),銅谷賢治(沖縄科学技術大学院大学) が哺乳類視覚系シミュレーション,神崎亮平(東京大学) が無脊椎動物嗅覚系シミュレーションを主担当した.ま た,Diesmann は 2011 年 9 月にドイツ・ユーリッヒ研 究所に転出したため,それ以降は日独の国際協力体制で 研究開発を行った.
3.神経細胞シミュレーション
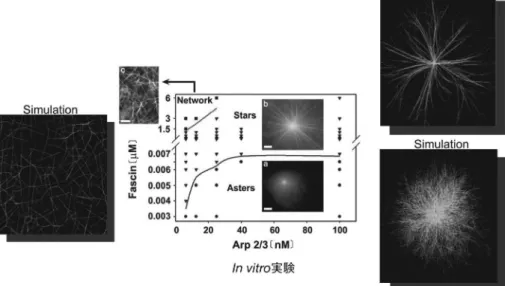
神経細胞の機能は,その形態に依存する.発達期の 神経細胞(例えば,大脳皮質での主要な細胞である錐 体細胞)は,初期の段階で多くの神経突起を出すもの の,ほとんどの場合,神経突起の中の 1 本だけを神経 の出力側となる軸索とし,残りを入力側となる樹状突起 とする特異な形態に至ることで,入出力変換素子として の基本機能を獲得する(極性形成)[Toriyama 10].ま た,軸索は外部からの誘因性物質を検知しその方向に伸 びていく(軸索伸長)ことで適切なワイアリングを行う [Sakumura 05].さらに,伸長した軸索は別の細胞の樹 状突起を認識し,シナプスと呼ばれる神経間情報伝達の ための構造体を形成する.シナプスは,その入力側と出 力側の活動,また神経伝達物質などの作用により大きさ を修正し,情報伝達の様相を変化させる(構造可塑性) ことで,「学習」する [Yagishita 14].このように,神経 細胞の形態変化は,その機能の獲得および獲得された機 能の変容に大きく関わるが,そのメカニズムについては 未解明の点が多く残され,現在も多くの神経科学研究の ターゲットとなっている.我々は,特に極性形成や軸索 伸長など,神経細胞における基本的な形態形成機能の再 現と,そこでの主要なプレーヤである分子の制御機構の 可視化を目指して,細胞骨格,細胞内分子反応,細胞膜 の同時シミュレーションを可能とするマルチフィジクス シミュレータ NeuroMorphoKit を開発した. 神経細胞は,キャンプに用いるテントのような構造を 有し,テントの布にあたる細胞膜をテントの支柱にあた るアクチン線維が支えることでその形状を維持する.ア クチン線維の動態がいかに細胞膜の動態に関わるのかに ついては未知な部分があるが,ここでは,両者は揺らい でおり,揺らぎにより局所細胞膜とアクチン線維の先端 部との間に空間が生成された場合,線維先端部はアク チン分子の重合が起こりやすくなるというモデル(ラ チェットモデル)を採用した.アクチン線維は,確率的 分子反応に基づき,重合・脱重合を繰り返し,また,別 の確率的分子反応に基づき枝分かれすることで,網目状 の構造(葉状仮足)となり,細胞膜を支える.また,ア クチン線維には方向性があり,プラス端での重合確率が 高く,反対にマイナス端での脱重合確率が高いため,結 果的に細胞膜に近いプラス端方向に無限軌道のように移 動していく(アクチントレッドミル仮説).このような アクチン線維の移動が集団的に発生すると,細胞膜はそ の方向に押され,結果的に細胞は移動する(細胞走性). 軸索の伸張は,この細胞走性が,軸索先端部である成長 円錐で特異的に起こる現象であると考えられている.以 上をまとめると,細胞内においては分子活性に応じてア クチン線維の重合・脱重合,さらには枝分かれが起こる. 細胞膜は揺らぎ,空間ができるとアクチン線維が重合さ れ,結果的に形態を変える.加えて,細胞内の分子活性 は,外部からの刺激に応じて変化し,また細胞内では活 性化および不活性化分子は拡散する.NeuroMorphoKit では,アクチン線維の動態については分子の局所濃度に 基づく非定常ポアソン過程の確率シミュレーション,細 胞膜の動態についてはポリゴン近似によるエネルギー緩 和シミュレーション,分子シミュレーションについては, 細胞内部をコンパートメント化し,そこでの反応拡散系 を離散化空間で近似したマルチコンパートメントモデル により実装した [Nonaka 11].120 万本の初期アクチン 線維,200×200 個の二次元のコンパートメントによる 図 1 NeuroMorphoKit の「京」上での性能評価空間近似,また,100 個のノードからなる一次元細胞膜 を用いた二次元細胞の形態変化をテストベッドとして, スパコン「京」による実装性能を評価した(図 1).「京」 の 16 384 コア並列(MPI 並列,およびハイブリッド並 列)までの評価を実施し,8 192 コア並列で並列化率(プ ログラムの中で並列化された部分の割合)p=0.997 を 達成した.8 192 並列辺りで並列化性能の頭打ちが発生 したが,これはアクチン線維のシミュレーションにおい て,各コンパートメントでの分子濃度が必要となり,そ の情報をアクチン線維の 1 本 1 本の計算を担当する計算 ノード間で共有するための通信コストがボトルネックに なったことによる.このボトルネックの解消のため,分 子濃度および膜形状についてノード間での情報共有方式 の改良を進めることで,並列化性能を大幅に向上させた ものの,8 192 コア並列以上では性能向上の効果が薄れ てしまった. NeuroMorphoKitを用いて,神経細胞の形態形成のシ ミュレーションを行った.まず,外部からの誘因性物質 がある状況で,神経細胞の遊走(細胞走性)のシミュレー ションを行い,誘因性物質から細胞内分子活性に至るシ グナル伝達が細胞形態の変形およびそれに基づく細胞移 動に本質的であることを示した.また,神経細胞,特に 軸索先端部は丸い形状ではなく,ぎざぎざした特徴的な 形状をとる.このぎざぎざに相当する部分は糸状仮足と 呼ばれるが,この構造体は,アクチン線維がリンカー分 子により束ねられることによって生成する.アクチン線 維が力学的に曲がる過程,リンカー分子による線維結束 過程などをモデル化することで,試験管内での糸状仮足 形成を模したシミュレーションを行った.結果として, 枝分かれを制御する分子の濃度,結束を制御する分子の 濃度を変化させた際に,糸状仮足様,葉状仮足様,スト レスファイバ様のアクチン構造が in silico で生成される ことが確認され,試験管内の実験を再現した(図 2).加 えて,三次元形状に対しても対応可能とした. NeuroMorphoKitは神経細胞の形態形成シミュレー ションに着目しており,神経細胞での情報伝達において 重要となる電気的活動は対象としていない.そこで,形 のある神経細胞における電気的および生化学的活動を シミュレーションできるソフトウェアである A-Cell の MPI並列化およびスパコンへの移植を進めた.また, NeuroMorphoKitと A-Cell とをハイブリッド接続し, 特に形態,局所膜電位,コンパートメント内分子濃度な どを共有化するためのデータ交換形式 netCDF-neuron を規定した.この並列化 A-Cell は並列化率 0.9999 以 上を達成した.また,並列化 A-Cell を用いて転写因子 NF-κBの分子シミュレーションを行った.この転写因 子は中枢神経系で発現しており,学習に関わることが知 られている一方で,核内でその濃度が振動することがわ かっている.この振動現象の発生機序を解明するため に 40 万コンパートメントからなる三次元細胞をつくっ てシミュレーションを行った.シミュレーション結果を 詳細に解析することで,拡散定数や核膜輸送量などの空 間パラメータのすべてが振動パターンに関わることがわ かった [Ohshima 14].
4.神経回路シミュレーション
哺乳類の大脳皮質における神経情報処理の基本的な 単位はコラムとも呼ばれる局所神経回路であり,それ は典型的には 10 万個もの神経細胞が層間(哺乳類では 6層構造)で特徴的な結合をなす複雑系である.NEST(NEural Simulation Tool)はこうした局所回路シミュ レーションのためのプラットフォームであり,点神経細 胞(特定の形のない,すなわち,点として表現可能な神 経細胞)からなる回路のシミュレーションを得意として いるが,形のある細胞も対応可能である.神経の回路内 情報伝達は神経発火によるが,発火ごとにそのイベント 情報を全細胞に伝達するイベント駆動方式は,正確な積
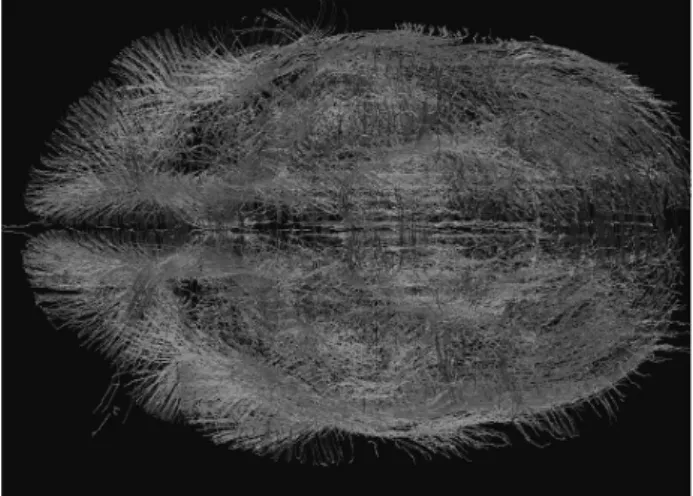
分計算を可能とするものの効率が悪く,大規模化は困難 である.NEST では,時間軸を一定の間隔に区切り,そ の間隔内では予測に基づき細胞ごとに積分計算を行った うえで,間隔内で発生した発火を全細胞に伝え,発火に ついては時間を遡って各細胞の積分計算の更新を行うと いう時間駆動型のアプローチをとることで,効率良いシ ミュレーションを行う.この際にカルマンフィルタなど の精度の良い予測法を用いることで精度を確保する.大 規模神経回路のシミュレーションの難しさは,原理的に は回路内の全細胞間が接続し得るため,空間局所性など 並列化のための手掛かりが少ないことである.NEST は, 「京」の上で,5×108個の細胞,3×1012個のシナプス からなる,小型の哺乳類の脳全体に匹敵する巨大神経回 路のシミュレーションを達成した.その際に,196 608 コアを用いた MPI-OpenMP のハイブリッド並列実装に より,1 秒の生物時間を 25 分でシミュレーションした. 一般に神経細胞間のシナプス結合には異なるタイプのダ イナミクスと可塑性をもつものがあるが,一つの神経細 胞が各計算機コア上で単一種類のシナプスのみから入力 を受けるものと仮定することで,メモリの利用効率を上 げることができる.ISLiM プロジェクトでは,上記のア イディアを取り込んだ NEST 第四世代カーネル [Kunkel 14]でもって開発が終了したが,この新しいカーネルに 基づき「京」の全計算ノードを用いて計算すれば,世界 最大規模の神経回路のシミュレーションが達成されるの では,と期待された.そこで,NEST を用いた神経回路 シミュレーションは,理化学研究所が代表機関となった HPCI戦略プログラム「予測する生命科学・医療および 創薬基盤」とユーリッヒ研究所の神経科学・医学研究所 による共同研究に引き継がれた.2013 年夏に,「京」の 全計算ノード(82 944 ノード,663 552 コア並列)を 使用した「超」大規模神経回路のシミュレーションが実 施された(図 3).この神経回路は 17 億 3 000 万個の神 経細胞が 10 兆 4 000 億個のシナプスでつながるもので, これまでの世界記録を神経細胞数で 6%,シナプス数で 16%上回っていた.結果として,生物時間の 1 秒を約 40分かけてシミュレーションすることができた(2013 年 8 月 2 日報道発表,理化学研究所).なお,NEST はオー プンソースソフトウェアとして公開されており,世界中 の神経科学者が使用することができる. 一方で,大脳皮質で見られる特徴的な階層構造が神 経活動とどのような関係をもつのか,また,いかなる情 報処理を実現しているかの解明を目指して,神経回路シ ミュレーションを利用した計算神経科学研究を行った. 視覚野では,外界から得られる膨大な視覚情報から,視 野内の注目すべき情報に焦点を当て,それを重点的に処 理している(視覚的注意).電気生理学的・解剖学的知 見に基づく詳細なネットワークをもつ視覚皮質の層構造 局所回路モデルを NEST により構築し,視覚的注意が視 覚皮質層の動態に与える影響をシミュレーションにより 検討した.ボトムアップ的な視覚情報とトップダウン的 な注意入力が局所回路内で作用し合うことを示し,視覚 的注意が皮質層の視覚処理に果たす役割を予見した.ま た,局所回路の数を増やし,視覚野内の局所領域を忠実 に再現するシミュレーションを行った結果,空間的注意 と特徴に基づく注意による神経細胞応答の変調効果が, 定量的によく説明されることがわかった [Wagatsuma 13].
5.哺乳類視覚系シミュレーション
哺乳類の視覚系は,眼光学系,網膜,視覚皮質,脳幹 (眼球運動駆動部)などで構成される多階層複雑系であ り,その機能の理解には,構成要素のモデル化とともに, それらを統合した大規模シミュレーションが必要であ る.ISLiM プロジェクトでは,計算機環境やプログラミ ング言語に依存せずにモデルの構築や統合を可能とする モデル開発共有プラットフォーム環境(PLATO)の開発, およびモデル結合に用いる共有データフォーマットな らびにその利用支援ライブラリに対して,「京」上での MPI実装が進められた [Kannon 11].視覚系を構成す る構成要素モデルは以下のようなものである.(1)眼球 運動系は,コンダクタンスベースの細胞モデルとして記 述し,物体注視時に生じる微小眼球運動ならびに視野上 の物体を反射的に捉える急速眼球運動の生成を可能とし た [Inagaki 11].(2)眼光学系は,眼球形状の特性,瞳 孔系の特性などの知見を追加して構築を進め,1 000× 1 000の網膜像の生成を可能とした.(3)網膜は,視細 胞,水平細胞,双極細胞,ならびに神経節細胞から構成 されている.視細胞について,約 3 600 万個の細胞から 構成されるモデルの構築を行い,それらのうち 150 万個 の錐体細胞からなる Cone Mosaic と呼ばれる L 型,M 型,S 型の視細胞配置による応答を再現し,1 504 並列 での動作(並列化率 p=0.89)を確認した.双極細胞層 および神経節細胞層は,それぞれ 150 万個,40 万個の 細胞から構成されるモデルを構築し,それぞれの細胞応 答を再現するとともに 1 024 並列での動作を確認した. 図 3 NEST による「超」大規模神経回路シミュレーション (理化学研究所の報道発表資料より)また,これまでに開発した共有データフォーマットなら びにその利用支援ライブラリ PLATONIC を用いて,眼 球運動モデル,眼光学モデル,網膜視細胞モデル(Cone Mosaic)ならびに双極細胞層・神経節細胞層モデルの統 合を進め,自然画像,錯視画像を用いた視覚系シミュレー ションを「京」上で実施した. 一方で,視覚系の出力を司る眼球運動系,すなわち, 網膜─上丘─眼球運動制御系のモデルを NEST 上に実装 した.特に上丘は多階層からなるスパインキングニュー ロンの回路モデルとして実装した.網膜入力に基づき サッカード眼球運動が誘発される際に,上丘回路の各層 では視標刺激に応じた特徴的な時空間パターンが形成さ れる.例えば,サルの神経生理学実験によれば,上丘の 出力を与える中間層のバースト細胞は,ベル型の発火パ ターンをもち,深層では活動の時空間的な拡張が生じる ことがわかっているが,シミュレーションはこれらを良 く再現した.また,上丘により駆動される眼球運動は, サッカード角度に対してピーク速度は特徴的な非線形 カーブを描くが,この性質もシミュレーションにより良 く再現できた [Moren 13].また,視覚運動系を中心とし た閉回路シミュレーションを実施した.このシミュレー ションは ATR(京都)に置かれたロボット頭部,理化 学研究所に設置されたスパコン RICC(和光)上の上丘 シミュレータ,それらをネットワークでつなぐクラスタ モジュール(MUSIC を用いて実装)からなる.ロボッ トの眼球に当たるカメラ画像から視標刺激(実際は新規 物体)に対応した特徴点を抽出し,その入力に対する上 丘モデルの回路動作に基づき,ロボットカメラが特徴点 位置に跳躍眼球(サッカード)運動を実行する.システ ム全体の遅れ時間は 120 ms であったが,これは主にネッ トワークの遅れによるものであった.
6.無脊椎動物嗅覚系シミュレーション
無脊椎動物,特にモデル生物であるカイコガを対象に, 105個程度の神経細胞からなる脳全体レベルの嗅覚情報 処理,すなわち,脳における入力(匂い受容)から出力(匂 い源探索行動)までの情報処理のシミュレーションを目 指し,以下の研究を実施した.(1)カイコガ神経データ ベースの整備を進め,約 1 600 個のカイコガの脳内神経 の三次元形態・生理データを収集,解析などに利用可能 にした.(2)嗅覚系一次中枢である触角葉(哺乳類脳に おける嗅球に対応),および匂い源探索の運動パターンを 生成する前運動中枢である側副葉において,各領域また 各領域を連結する神経細胞について細胞レベルで構造と 機能のデータを解析した.側副葉においては,持続的な ステアリング信号を出力する側副葉からの下降性神経が 側副葉の特定の領域に分枝していること,側副葉の入力 細胞の嗅覚応答が一過的であること,側副葉は両側の触 角情報を統合すること,また,行動指令信号の長期的応 答が側副葉で生成されること,などを明らかにした.(3) 脳から胸部運動系に下降する神経細胞を選択的にラベル し,選別したニューロンをスライドガラス上に展開し培 養することで,電位依存性の電流を計測する手法を確立 した.同時に触角葉や側副葉を構成する神経細胞の電位 や電流クランプ実験を進め,触角葉から上位中枢への出 力神経や側副葉神経細胞のスパイク発火の特性情報を得 た.(4)側副葉を構成する神経細胞の膜電位データと 形態データから,側副葉の神経回路を構成する両極性神 経や局所介在神経をさらに分類し,神経細胞の平均応答 波形を作成した.この平均応答をつくり出す側副葉神経 回路のシナプス結合強度の推定を行い,その結果をもと に,側副葉回路モデルを構築した.(5)多数の脳の形状 に対して平均化操作を加えることで,カイコガの「標準 脳」を作成した.神経細胞をこの標準脳座標系に 10 µm 以下の誤差でマッピングするプロコトルを確立した.(6) 神経細胞の三次元形態から神経形態を抽出する技術を試 行し,神経細胞の形態を効率良く取得するソフトウェア を開発した.(7)神経細胞プラットフォームシミュレー タである NEURON を「京」に移植,チューニングを加 えることで,単体性能でコア当たり 1.54 GFLOPS を達 成した.さらにシナプス間の通信をノード配置最適化し たポイント間通信に改良することによって通信コストを 半分以下程度に改良した.その結果,「京」の 196 608 コアによる並列実行で 187 TFLOPS の計算性能を達成 した.(8)実数値遺伝的アルゴリズムを用いて,単一細 胞の膜特性を推定するソフトウェアを作成し,13 万コ ア未満の並列実行について良好な並列性能を得た.この プログラムを触角葉出力神経に適用し,入力信号(電流 注入)として適当な正弦+三角波を入力することで早い 収束が得られることを示した.7.脳神経シミュレーションのこれから
ISLiM脳神経系研究開発チームの研究は,長期的には, 脳神経系における発達障害や神経疾患の機序の解明,最 適な学習(教育)過程の設計,脳を模した知的情報処理 デバイスの開発などの社会・産業応用,また,ブレイン マシンインタフェースの高精細化などの医療応用に貢献 することを目指すものであった.プロジェクトは 2013 年 3 月で終了したが,その成果は,HPCI 戦略プログラ ム「予測する生命科学・医療および創薬基盤」に引き継 がれている.そちらの成果については,本特集の五十嵐 潤らによる記事(pp. 623-629)を参照されたい.また, 無脊椎動物嗅覚系シミュレーションは,「京」の一般利 用課題に選定され,平成 27 年度まで開発が継続されて いる.その成果については,本特集の宮本大輔らによる 記事(pp. 630-638)を参照されたい.欧州では Human Brain Project という 24 か国 112 研 究機関が参加するメガサイエンスが走っているが,こ
こではスパコン利用に基づくヒト全脳シミュレーション が重要な課題となっている.我々は,次世代のエクサフ ロップス(1018 FLOPS)スケール計算機により,ヒト の脳全体レベルの回路シミュレーションが可能と考えて いる.2013 年夏に NEST によりシミュレーションされ た神経細胞数である 17 億 3 000 万個は,63 億個ともい われるマカクサルの全神経細胞数よりは下回るものの, マーモセット(6 億個),ヨザル(14 億個)などの新世 界サルのものよりも多い.エクサフロップススケール計 算機によれば,ヒト全脳(860 億個)の神経回路シミュ レーションについて,生物時間 1 秒を数時間で実施可能 と見積もられている(計算科学ロードマップ白書). 一方で,これまでの大規模神経回路シミュレーション では,脳の解剖学情報はあまり使われてこなかった.そ の理由は,全脳レベルでの解剖学情報,特にシナプス 結合強度などの回路パラメータが未知であったためで ある.動物の全脳レベルでの神経回路動態のシミュレー ション,また,それに基づくヒトの発達障害・神経疾患 の機序の解明という長期目標の達成のためには,脳のマ クロレベル(主に MRI の解像度によるもの),メゾレ ベル(主に光学顕微鏡の解像度によるもの),ミクロレ ベル(主に電子顕微鏡の解像度によるもの)の多重解像 度にわたる回路パラメータを調べる基礎研究が必須であ る.実際に,理化学研究所を中心とした研究チームは, 2014年より,「革新的技術による脳機能ネットワークの 全容解明プロジェクト」を実施している.このプロジェ クトにより,マーモセットにおける,マクロレベルの全 脳の結合マップが 2019 年頃までに完成し,メゾレベル も同時期までに部分的にできることが期待される(図 4). また,マーモセットの全脳結合マップと対応付け可能な ヒト精神・神経疾患に関わる脳指標の探索も進めるとし ている.こうした,全脳にわたる脳の構造・機能マップか らの回路パラメータ情報を統合する形でのシミュレーショ ンが可能となる時代が近づいているように思われる.
8.お わ り に
第三の科学ともいわれるシミュレーション科学の重要 性が指摘されて久しいが,ヒトの全脳にわたる神経系シ ミュレーションについては,いまだ道半ばである.脳は それ自体小宇宙であり,その機能が理解できる程度にシ ミュレーションすることは,脳をつくることで,我々自 身とは何かを究明するための道であろう.その人類の究 極の目標の一つに向けて,歩みを止めることはできない と思われる. 著者が学生の頃は,第五世代計算機プロジェクトが華 やかで,計算機が「人間のロジックの実装」により人間 の能力の一部に近づくのではと期待されていた.あれか ら 30 年が経ち,今は,計算機がその莫大な計算能力と データ処理能力で「人間のアーキテクチャを模して学習」 することで人間の能力を十分に模倣できるのではないか と期待されている.人間を模倣(シミュレーション)し, 人間の知的痕跡(データベース)を統合することで,人 間の能力を場合により超え,また,知性の起源への理解 を大きく進めることができる,新しい「人工知能」の時 代の到来を心から歓迎している.◇ 参 考 文 献 ◇
[Fukushima 80] Fukushima, K.: Neocognitron: A self-organizing neural network model for a mechanism of pattern recognition unaffected by shift in position, Biological Cybernetics, Vol. 36, No. 4, pp. 93-202(1980)
[Hodgkin 52] Hodgkin, A. L. and Huxley, A. F.: A quantitative description of membrane current and its application to conduction and excitation in nerve, J. Physiology, Vol .117, No. 4, pp. 500-544(1952)
[Inagaki 11] Inagaki, K., Hirata, Y. and Usui, S.: A model-based theory on the signal transformation for microsaccade generation, Neural Networks, Vol. 24, No. 9, pp. 990-997(2011) [Kannon 11] Kannon, T., Inagaki, K., Kamiji, N. L., Makimura, K.
and Usui, S.: PLATO: Data-oriented approach to collaborative large-scale brain system modeling, Neural Networks, Vol. 24, No. 9, pp. 918-926(2011)
[Kunkel 14] Kunkel, S., Schmidt, M., Eppler, J. M., Plesser, H. E., Masumoto, G., Igarashi, J., Ishii, S., Fukai, T., Morrison, A., Diesmann, M. and Helias, M.: Spiking network simulation code for petascale computers, Frontiers in Neuroinfomatics, Vol. 8, No. 78, doi: 10.3389/fninf.2014.00078(2014)
[Moren 13] Moren, J., Shibata, T. and Doya, K.: The mechanism of saccade motor pattern generation investigated by a large-scale spiking neuron model of the superior colliculus, PLoS ONE, Vol. 8, e57134(2013)
[Nonaka 11] Nonaka, S., Naoki, H. and Ishii, S.: A multiphysical model of cell migration integrating reaction-diffusion, membrane and cytoskeleton, Neural Networks, Vol. 24, No. 9, pp. 979-989(2011)
[Ohshima 14] Ohshima, D. and Ichikawa, K.: Regulation of nuclear NF-κB oscillation by a diffusion coefficient and its biological implications, PLoS ONE, Vol. 9, No. 10, e109895 (2014)
[Sakumura 05] Sakumura, Y., Tsukada, Y., Yamamoto, N. and Ishii, S.: A molecular model for axon guidance based on cross talk between Rho GTPases, Biophysical Journal, Vol. 89, No. 2, 図 4 マーモセットマクロコネクトミクス
pp. 812-822(2005)
[Toriyama 10] Toriyama, M., Sakumura, Y., Shimada, T., Ishii, S. and Inagaki, N.: A diffusion-based neurite length-sensing mechanism involved in neuronal symmetry breaking,
Molecular Systems Biology, Vol. 6, No. 1, p. 394, doi:10.1038/
msb.2010.51(2010)
[Wagatsuma 13] Wagatsuma, N., Potjans, T. C., Diesmann, M., Sakai, K. and Fukai, T.: Spatial and feature-based attention in a layered cortical microcircuit model, PLoS ONE, Vol. 8, No. 12, e80788(2013)
[Yagishita 14] Yagishita, S., Hayashi-Takagi, A., Ellis-Davies, G.C.R., Urakubo, H., Ishii, S. and Kasai, H.: A critical time window for dopamine actions on the structural plasticity of dendritic spines, Science, Vol. 345, No. 6204, pp. 1616-1620 (2014) 2015年 4 月 17 日 受理