- 1 -
複数サーボモータの協調制御による精密位置決め法の研究
山梨大学大学 院
医学工学総合 教育部
博士課程学位 論文
2015年 3 月
内田豊一
- 2 - 博 士 論 文 課 題 名 「複 数 サーボモータの協 調 制 御 による精 密 位 置 決 め法 の研 究 」 目 次 ··· 2 1. 緒 言 ··· 4 1.1 高 精 度 位 置 決 め技 術 ··· 4 1.2 研 究 の狙 いと概 要 ··· 6 1.3 精 密 位 置 測 定 技 術 ··· 7 1.4 高 精 度 位 置 計 測 ··· 8 1.5 歯 車 機 構 の特 徴 とバックラッシ ··· 9 1.6 バックラッシを原 因 とする諸 問 題 (振 動 や位 置 決 め精 度 の悪 化 ) ··· 11 1.7 バックラシ補 償 法 ··· 12 1.7.1 位 置 関 係 調 整 方 法 (調 整 ・固 定 方 式 ) ··· 12 1.7.2 外 力 による歯 車 かみ合 い部 与 圧 調 整 方 法 ··· 13 1.8. モータによるバックラッシ自 動 調 整 機 構 ··· 14 2.バックラッシ影 響 の解 析 ··· 15 2.1 本 章 のねらい ··· 15 2.2 バックラッシ試 験 装 置 ··· 16 2.3 バックラッシ解 析 の手 法 ··· 18 2.4 バックラッシの力 学 モデル ··· 22 2.4.1 バネ-ダンパ型 モデル ··· 22 2.4.2 二 慣 性 モデル ··· 23 2.5 バックラッシによる残 留 振 動 解 析 ··· 25 2.6 本 章 のまとめ ··· 26 3.サーボモータによる位 置 決 めにおけるバックラッシ解 析 ··· 27 3.1 本 章 のねらい ··· 27 3.2 モータ基 礎 方 程 式 基 礎 方 程 式 ··· 28 3.3 数 値 解 析 ツールを用 いた解 析 ··· 32 3.4 制 御 系 の検 討 ··· 34 3.5 位 置 決 め時 の偏 差 ··· 35 3.6 シングルモータ制 御 での実 験 結 果 とシミュレーションの比 較 ··· 37 3.7 ツインモータの制 御 性 改 善 ··· 39 3.8 ツインモータ駆 動 における挙 動 解 析 ··· 41 3.8.1 ステップ応 答 実 験 ··· 41 3.8.2 ツインモータ駆 動 時 の比 例 積 分 ゲインの影 響 ··· 42 3.9 ツインモータ制 御 系 の速 度 オフセットの影 響 ··· 44 3.10 本 章 のまとめ ··· 45 4. バックラッシ補 償 方 法 と力 学 モデル ··· 46 4.1 本 章 の目 的 ··· 46 4.2 バックラッシ補 償 方 法 と力 学 モデル ··· 47 4.3 ツインモータ駆 動 における挙 動 解 析 ··· 49 4.4 本 章 のまとめ ··· 53 5. 遊 星 歯 車 を増 設 した3慣 性 系 でのツインモータ制 御 系 のモデル ··· 54 5.1 本 章 のねらい ··· 54 5.2 3慣 性 系 でのツインモータ制 御 系 ··· 55
- 3 - 5.3 遊 星 歯 車 減 速 機 付 ツインモータ駆 動 系 の周 波 数 解 析 ··· 58 5.4 パルス送 り制 御 ··· 60 5.5 本 章 のまとめ ··· 65 6. 結 言 ··· 66 6.1 まとめ ··· 66 6.2 今 後 の予 定 ··· 68 謝 辞 ··· 69 関 係 論 文 ··· 70 参 考 文 献 ··· 71
- 4 - 1 . 緒 言 1 . 1 高 精 度 位 置 決 め 技 術 産 業 機 械 に お い て 高 速 ・ 高 精 度 化 の 性 能 向 上 と , 小 形 化 ・ 低 価 格 化 ・ 低 騒 音 化 ・ 操 作 性 の 簡 単 化 ・ 知 能 化 ・軽 量 化 などの付 加 価 値 向 上 は絶 えず行 われている .ただ図 1-1,図 1-2 の日 本 機 械 学 会 創 立 1 10周 年 記 念 事 業 でまとめられた JSME の産 業 用 ロボットでの技 術 ロードマップを見 ると ,モータ単 体 のパ ワーレー ト 密 度 は ほ ぼ 上 限 で あ り , また 位 置 決 め 精 度 も ほ ぼ 下 限 界 に きて おり , 点 線 の ように 向 上 さ せる ためには技 術 的 に大 きなブレークスルーが必 要 であることが判 る 1 ). Fig. 1-1 モータの平 均 パワーレート密 度 の変 遷 Fig. 1-2 モータの可 搬 重 量 別 位 置 決 め精 度 の変 遷
- 5 - 一 般 的 には産 業 機 械 を 構 成 要 素 で モータやエア シリ ンダ などの電 機 系 と ギヤやリン クなどの機 械 系 を 有 する系 に ,センサや制 御 機 器 を加 え 制 御 技 術 で性 能 向 上 と付 加 価 値 向 上 を図 ることが多 い .電 機 系 もギ ヤ やリ ン クの 機 械 系 は , 動 く た め に 必 要 な 摺 動 面 や 噛 み 合 い 部 の 耐 久 性 や コ ス トを 考 慮 し な がら 機 械 設 計 が行 われるので,必 然 的 に隙 間 が設 けられたり,摩 擦 力 を下 げ生 じた摩 耗 粉 を除 去 するための給 油 機 構 が設 けられたりする.これが機 械 系 のバックラッシやガタなどの誤 差 要 因 を生 む 2 ). 工 作 機 械 や 搬 送 装 置 な どでは, 所 望 の速 度 で 所 望 の出 力 ト ルクを 得 るため , ギヤ 駆 動 系 を用 いて動 力 の回 転 速 度 を減 じて出 力 トルクを向 上 させる減 速 機 を用 いているが,動 力 伝 達 を円 滑 に行 うためにバ ックラッシが設 けられており,これが位 置 決 め精 度 低 下 や振 動 の原 因 になっている.特 に高 負 荷 搬 送 にな るほど位 置 決 め精 度 は悪 くなる.また,ボールネジ等 のバックラッシを構 造 的 に取 除 いた機 構 では,バック ラッシの影 響 は少 なくなり位 置 決 め精 度 は改 善 するが,回 転 数 に上 限 があり高 負 荷 や長 いストロークの搬 送 には不 向 きである 3 ). これらの誤 差 要 因 はこ れまでの技 術 開 発 で かなり 解 明 されてきている .通 常 ,位 置 決 め 制 御 系 に含 ま れ る バックラッシは制 御 系 にとって悪 影 響 を 与 え る要 素 で あり,そ の影 響 の解 析 には 不 感 帯 要 素 で 記 述 されるモデルが用 いられて,制 御 系 の応 答 解 析 が行 なわれている 4 ).バックラッシの補 償 方 法 としては,バ ックラッシの生 じている ギヤ間 にバネを入 れて従 動 軸 側 の ギヤを押 す機 械 的 補 償 方 法 4 )やバックラッシの ある制 御 系 に位 相 進 み回 路 で補 償 する方 法 4 ),制 振 制 御 のためのモータの速 度 制 御 系 のモデル化4 8 ) や非 線 形 要 素 を導 入 してギヤトルクを非 線 形 補 償 する方 法 7 9 )や圧 電 素 子 によるバックラッシ制 御 1 0 8 ) 1 0 9 ), 予 めバックラッシ量 を測 定 しニューラルネットワークで学 習 して補 償 する方 法 1 2 5 ),バックラッシを非 線 形 モ デル化 し逆 動 作 で補 償 する方 法 1 2 8 ) 1 2 9 ) 1 3 1 )などいろいろ提 案 されている. これらの手 法 では,機 械 的 拘 束 条 件 を変 化 させたり,ソフト的 な処 理 を最 適 化 させ位 置 決 め時 を安 定 化 させる必 要 がある等 の問 題 がある.
- 6 - 1.2 研 究 の 狙 い と 概 要 本 研 究 で は, 単 体 性 能 向 上 よ り複 数 モータ で 駆 動 することによ り , 同 一 の 出 力 軸 となる 減 速 機 に 対 し て複 数 のモータで駆 動 力 または操 作 力 を与 えることにより,同 一 歯 面 に対 し て駆 動 系 に作 用 する力 は同 一 の ま ま 駆 動 力 は 複 数 倍 化 さ せ , 位 置 決 め 時 は 外 部 エン コ ーダ によ り 高 精 度 な 位 置 決 め を する , 重 負 荷 の搬 送 で高 精 度 な位 置 決 めができるモーションコントロール技 術 を検 討 する . 高 負 荷 搬 送 で用 いられている複 数 モータでの協 調 制 御 搬 送 方 式 を応 用 して, 2 つのモータペアからな るツイ ンモータ 制 御 で 機 械 的 に ギヤのバッ クラッシ を補 償 する 位 置 決 め方 法 を提 案 する . ギヤ付 き ツイ ン モータドライブでの回 転 駆 動 系 において,バックラッシ要 素 を含 む基 本 的 な制 御 モデルを構 築 し,個 々の モ ータ 制 御 を 個 別 に 位 置 決 め 制 御 し て バッ クラ ッ シ 量 を 制 御 するこ と に より 位 置 決 め の 安 定 化 を 図 る 方 法 を示 す1 3 9 ) 1 4 0 ). 基 本 構 成 として ツインモータを同 一 推 力 方 向 に協 調 制 御 しながら,最 終 位 置 決 め時 はツインモータ間 の位 相 制 御 を行 なってバックラッシ補 償 を行 なう制 御 方 法 であり,この方 法 はツインモータ制 御 をマスター スレーブ制 御 化 し て,出 力 側 に取 り付 けた外 付 けの高 分 解 能 エンコーダの出 力 信 号 を基 に最 終 位 置 決 めを行 なうもので,ツイン モータ間 の位 相 制 御 を行 なうことによりモータ に付 加 されている減 速 機 内 の ギヤ バックラッシによる影 響 を抑 えモータエンコーダの 1p 内 の精 度 で位 置 決 めできることを目 指 し,停 止 時 の 静 的 な 位 置 決 め 精 度 の 改 善 に 効 果 のあるこ とを 確 認 する .ま た 伝 達 関 数 計 測 でシ ステム の 剛 性 が 上 が ることを確 認 する1 4 1 ) 1 4 2 ) 1 4 3 ). 更 にこのツインモータドライブの 制 御 性 改 善 のため,ツインモータに同 一 位 置 指 令 を与 え つつ,位 置 決 めするときにはバックラッシ制 御 を行 う 方 法 を示 す.まず負 荷 先 端 位 置 信 号 によるフィードバック信 号 を用 いたフルクローズド制 御 を 基 本 に, 位 置 決 め時 はバ ックラ ッシを無 く すため ギ ヤに荷 重 を与 え 続 ける拮 抗 動 作 をする方 法 を 示 す.まずツイ ン モータ駆 動 系 での安 定 性 判 別 を行 ない ,安 定 性 を確 保 するために, 負 荷 先 端 位 置 信 号 によるフィードバック信 号 を用 いたフルクローズド制 御 と,モータ位 置 信 号 をフィードバ ック信 号 に用 いたセミクローズド制 御 を組 み合 わせたフル&セミクローズド制 御 方 法 を提 案 する.また拮 抗 動 作 で生 じ るモータ定 常 位 置 偏 差 により絶 え ずモータへの速 度 入 力 に偏 差 信 号 が入 ることによるモータ 過 負 荷 の 原 因 は速 度 制 御 系 の積 分 要 素 が原 因 であることを示 し ,実 用 的 なツインモータの制 御 系 の構 築 を示 し,実 験 にて有 効 性 を示 す.1 4 4 ) これにより,ツインモータには位 置 指 令 を与 えるだけで高 精 度 な位 置 決 めができることを示 す.
- 7 - 1 . 3 精 密 位 置 測 定 技 術 XY ステージなどで使 用 される位 置 決 め制 御 系 の一 般 的 なモデルを以 下 に示 す .通 常 ,エンコーダを 内 蔵 した駆 動 モータで,リードスクリューを回 転 させ,搬 送 対 象 が取 り付 けられたテーブルをナット を介 して 駆 動 する.精 密 位 置 決 め系 では,リニアエンコーダでテーブル位 置 を精 度 良 く測 定 し ,位 置 決 めを行 う. 位 置 決 め系 の誤 差 要 因 を与 える要 素 として , (1)移 動 ステージ機 械 系 の軸 や案 内 面 の摺 動 抵 抗 (2)位 置 決 め装 置 の剛 性 や重 量 (3)位 置 決 め装 置 の熱 変 形 (4)駆 動 時 の振 動 (5)制 御 系 内 のアンプの安 定 性 (6)位 置 測 定 センサのドリフトや温 度 変 動 ,計 測 誤 差 (7)スクリュー部 とナット部 などの歯 車 駆 動 間 のバックラッシ が挙 げられ,(1)~(5)までは動 的 な影 響 ,(6)(7)は静 的 な影 響 を与 える.2 ) 3 ) (1)は,特 に案 内 面 のスライド面 での油 膜 状 態 や摺 動 状 態 が良 くないと ,動 特 性 や静 止 特 性 に影 響 を 与 え,スティックスリップ現 象 が生 じると他 の自 励 振 動 を引 き起 こす可 能 性 がある. (2)は,高 速 ・高 精 度 化 を図 る上 では,装 置 全 体 の剛 性 が不 足 していると,ねじれや撓 みなどの変 形 が 生 じ,トータルで位 置 決 め精 度 に影 響 を与 える .またこれらの解 決 のため剛 性 を上 げると重 量 増 加 になる ことがあり,応 答 速 度 に影 響 を与 え,ステージの変 形 や重 量 増 加 が摺 動 部 の抵 抗 を強 くする .これが最 終 位 置 決 め時 の再 現 性 に悪 影 響 を与 える . (3)は,装 置 全 体 の熱 膨 張 や熱 収 縮 で誤 差 が生 じる .特 に組 み立 てられている部 品 ごとに熱 膨 張 係 数 が異 なると,温 度 変 化 に対 して線 形 性 が無 くなり,温 度 補 償 しにくい. (4)は,制 御 系 全 体 で自 励 振 動 が生 じ たり,他 の機 器 の振 動 を受 ける可 能 性 があり,それを解 消 する ために制 御 ゲインを上 げたり下 げたりすると ,オーバーシュートや静 定 時 間 に影 響 を与 え ,最 終 位 置 決 め 精 度 が悪 くなる. (5)は,制 御 アンプ内 もアナログ回 路 部 で,通 電 初 期 や連 続 運 転 中 の特 性 変 化 (ドリフト) ,外 乱 電 気 的 ノイズの影 響 も受 ける. (6)は,例 えば位 置 測 定 センサにレーザ変 位 計 やレーザ干 渉 計 を用 いた場 合 ,レーザや受 光 センサの 温 度 特 性 の影 響 を受 けたりする .また通 電 初 期 や連 続 運 転 中 の特 性 変 化 (ドリフト)の影 響 も受 ける .ま たエンコーダ内 のセンサの温 度 変 化 や特 性 変 化 ,絶 対 的 な寸 法 変 化 などによる計 測 誤 差 の影 響 も受 け る. (7)は,歯 車 駆 動 系 でのバックラッシは特 に往 復 運 動 時 に影 響 が出 る . 本 研 究 ではこれらの誤 差 要 因 は外 部 エンコーダで補 償 するフルクローズドループ制 御 を基 本 として検 討 する. 搬 送 対 象 リニアエンコーダ テーブル ナット 駆 動 モータ エンコーダ カップリング リードスクリュー 案 内 ガイド 図 1 - 1 位 置 決 め 制 御 系 の 例
- 8 - 1 . 4 高 精 度 位 置 計 測 位 置 決 め制 御 系 で重 要 となるのが外 付 け位 置 計 測 方 法 である.一 般 的 に以 下 がある.3 ) 1 9 ) 2 8 ) (1) エンコーダ (2) レーザ干 渉 計 (3) イメージセンサ (4) 差 動 ドランス (5) レゾルバ (1)のエンコーダでは,ロータリーエンコーダとリニアエンコーダがある .表 1-1と表 1-2に市 販 品 の例 を挙 げる.これらは,モータ内 蔵 型 にも採 用 されたり,XY ステージに採 用 されているものである . 近 年 ,エンコーダの位 置 分 解 能 は向 上 しており,回 転 角 度 の検 出 精 度 は,1回 転 では 23 ビット分 解 能 あり,多 回 転 でも 16 ビットを超 える.16 ビットあれば,直 径 5mの旋 回 テーブルの先 端 でも 0.24mm の円 弧 長 で分 解 できる. またリニアエンコーダでは,数 nmの分 解 能 であり,絶 対 位 置 精 度 でも数 μmである. 必 要 な要 求 精 度 に合 わせて外 付 けの計 測 方 法 を選 択 する必 要 がある. 表 1-1 ロータリーエンコーダの市 販 品 比 較 メーカ パルス数 角度セン
サbit 分解能(deg) Max rpm
モータ容 量(W) 検出器方式 型式 多摩川精機 65,536 16 5.49E-03 3000 多回転 FA-CODER SA100 TS5667N253 多摩川精機 8,388,608 23 4.29E-05 6000 1回転 FA-CODER SA48 TS5700N420 日本製鋼(NSK) 2,621,440 21.3 1.37E-04 3600 ロータリーエンコーダ PNシリーズ(PN4) インナーロータモータ内臓エン コーダ仕様 ニコン 1,296,000 20.3 2.78E-04 ロータリーエンコーダ ロータリーエンコーダ SIR-H81 ニコン 3,600,000 21.8 1.00E-04 ロータリーエンコーダ ロータリーエンコーダ USR32400F/22500F キャノン 81,000 16.3 4.44E-03 ロータリーエンコーダ レーザーロータリーエンコーダ R-1S0 キャノン 225,000 17.8 1.60E-03 ロータリーエンコーダ レーザーロータリーエンコーダ X-1M
DANAHER 4,096 12 8.79E-02 ロータリーエンコーダ HENGSTLER ACUROインダストリー
(光学式)AD58 / BiSS/SSIマルチターン DANAHER 4,194,304 22 8.58E-05 ロータリーエンコーダ HENGSTLER ACUROインダストリー (光学式)AD58 / BiSS/SSI シングルター ン マグネスケール 8,589,934,592 33 4.19E-08 ロータリーエンコーダ Magnescale 三菱電機 4,194,304 22.0 8.58E-05 5000 500-9000 ロータリーエンコーダ HGシリーズ/サーボアンプMR-J4シリーズ 三菱電機 16,000,000 23.9 2.25E-05 5000 500-9000 ロータリーエンコーダ 中慣性モータHFシリーズ オリエンタルモータ 100,000 16.6 3.60E-03 3000 50-750 ロータリーエンコーダ チューニングレスACサーボモータユニット NXシリー ズ 多摩川精機 4,096 12.0 8.79E-02 10000 レゾルバ Smartsyn TS2640N321E64 SmartCoder AU6802N1 オリエンタルモータ 1,000 10.0 3.60E-01 500 ステッピングモーター 5相ステッピングモーターユニット RKII シリーズ FLEX 位置決め機能内蔵タイ プ 表 1-2 リニアエンコーダの市 販 品 比 較 長さ(mm) 分解能 精度補償 線膨張係数 10e-6/deg 型式
RENISHAW 1130 5.00E-09 1.00E-06 6 SiGNUM RELM ミツトヨ 1220 5.00E-09 2.00E-06 8.5 ABSATS□□E-HC
キャノン 10 8.00E-10 0.52 ML-08/1000GA
- 9 - 1 . 5 歯 車 機 構 の 特 徴 と バ ッ ク ラ ッ シ
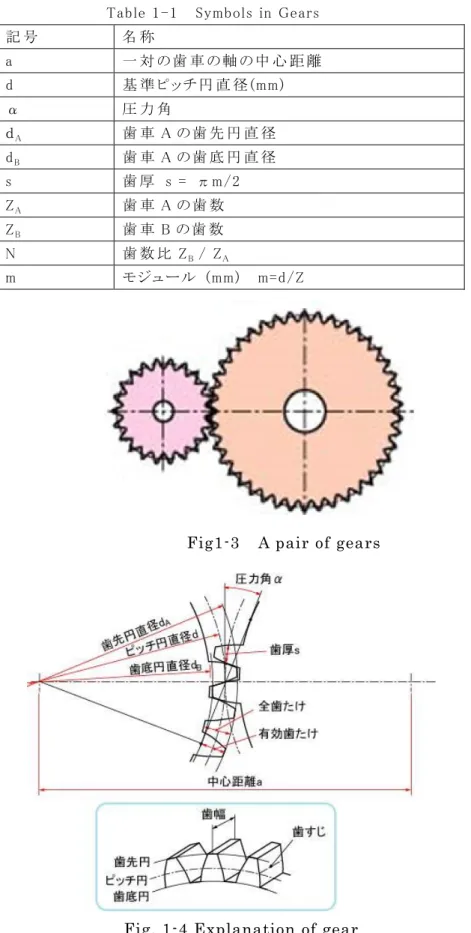
歯 車 に は 多 くの 形 状 が あ る が, 本 研 究 で 採 用 し て いる 最 も 代 表 的 な 歯 の形 状 がイ ンボ リ ュ ート 曲 線 の 平 歯 車 でその詳 細 な構 造 と特 徴 について 説 明 する.2 ) 3 ) 2 9 ) 3 0 ) 3 1 )
Table 1 -1 Symbols in Gears
記 号 名 称 a 一 対 の歯 車 の軸 の中 心 距 離 d 基 準 ピッチ円 直 径 (mm) α 圧 力 角 dA 歯 車 A の歯 先 円 直 径 dB 歯 車 A の歯 底 円 直 径 s 歯 厚 s = πm/2 ZA 歯 車 A の歯 数 ZB 歯 車 B の歯 数 N 歯 数 比 ZB / ZA m モジュール (mm) m=d/Z
Fig. 1-4 Explanation of gear Fig1-3 A pair of gears
- 10 - バ ッ ク ラ ッ シ( Backlash)と は 語 源 か ら「 後 方 に 揺 り 動 く 」と 言 う 意 味 で ,機 械 に 用 い ら れ る 送 り ね じ ,歯 車 な ど の 互 い に は ま り あ っ て 運 動 す る 一 対 の 機 械 要 素 に お い て ,運 動 方 向 に 意 図 し て 設 け ら れ た 隙 間「 遊 び 」の こ と で あ る の こ と で あ る .歯 車 の 単 体 性 能 が ど ん な に 精 度 が 良 く 性 能 が 良 く て も ,歯 車 は 機 械 に 組 み 込 ま れ て 機 能 す る .組 み 込 む た め に は 隙 間 が 必 要 で あ る し ,歯 車 は 運 転 に よ り 発 熱 に よ り 膨 張 し た 分 を 吸 収 す る 隙 間 が 必 要 で あ る .ま た 運 転 の た め 歯 車 は 摩 耗 し た り キ ズ が つ い た り す る .こ れ に よ り 隙 間 は 変 化 す る .つ ま り 隙 間 に よ っ て ね じ や 歯 車 は 自 由 に 動 く こ と が で き る .通 常 ,こ の 隙 間 に 潤 滑 油 な ど を 入 れ ,潤 滑 特 性 を 確 保 し た り , 冷 却 し た り す る . バ ッ ク ラ ッ シ に 関 し て は ,JIS B 1703「 平 歯 車 お よ び は す ば 歯 車 の バ ッ ク ラ ッ シ 」や JIS B 1705 「 か さ 歯 車 の バ ッ ク ラ ッ シ 」で ,バ ッ ク ラ ッ シ の 許 容 値 と 測 定 方 法 が 規 定 さ れ て い る .2 0 ) 2 1 ) 2 2 ) 2 3 ) た だ JIS で 規 定 す る バ ッ ク ラ ッ シ は ,運 転 し て 温 度 が 上 昇 し 熱 膨 張 し た 状 態 の 時 の も の で は な く ,運 転 終 了 し ,冷 え た 状 態 の 時 ,組 み 立 て 調 整 の 時 の も の で あ る .こ の た め ,位 置 決 め 制 御 系 の 動 的 な 状 態 で の 位 置 決 め 精 度 に 関 す る バ ッ ク ラ ッ シ に 関 し て は 明 確 に 定 め ら れ て い な い の で あ る . つ ま り 位 置 決 め 精 度 は , 位 置 制 御 系 と 位 置 測 定 系 に 依 存 す る の で あ る .
- 11 - 1 . 6 バ ッ ク ラ ッ シ を 原 因 と す る 諸 問 題 ( 振 動 や 位 置 決 め 精 度 の 悪 化 ) バ ッ ク ラ ッ シ に よ り ,あ る 方 向 に 回 転 し て い た も の を 逆 の 方 向 に 回 転 さ せ た と き ,こ の 隙 間 の 分 は 自 由 に 動 く の で ,制 御 系 に お い て は 位 置 ず れ を 引 き 起 こ し た り ,遊 び の 間 に あ っ た 歯 が 駆 動 に よ り か み 合 い を は じ め た と き に 歯 面 衝 突 が 生 じ る こ と に よ り 歯 車 の 破 損 が 生 じ る こ と が あ る .フ ラ イ ス 盤 な ど の 工 作 機 械 を 使 用 し た 加 工 の 際 は ,工 作 機 械 が 持 つ バ ッ ク ラ ッ シ を 考 慮 し て 寸 法 の 調 整 を し な け れ ば な ら な い . ま た 自 動 車 な ど で は ク ラ ッ チ で エ ン ジ ン か ら の 駆 動 軸 の 歯 車 と 被 駆 動 軸 の 歯 車 へ の 伝 達 を 接 続 し た り 解 放 し た り す る が ,こ の と き 各 多 段 歯 車 駆 動 系 に あ る バ ッ ク ラ ッ シ に よ り ア イ ド ル 騒 音 ( 通 称 ガ ラ 音 ) と 呼 ば れ る 歯 打 ち 音 が 発 生 す る .5 ) 6 ) バ ッ ク ラ ッ シ の 影 響 を 無 く す た め バ ッ ク ラ ッ シ を 小 さ く し す ぎ る と ,潤 滑 が 不 十 分 に よ り 歯 面 摺 動 摩 擦 が 大 き く な っ た こ と で 振 動 や 騒 音 を 引 き 起 こ し ,歯 車 を つ な ぎ 合 わ せ た と き に 生 じ る 加 工 誤 差 に よ る 不 連 続 性 が 吸 収 で き な く な っ た り す る .7 ) 8 ) こ れ ら を 嫌 い , バ ッ ク ラ ッ シ を 大 き く し す ぎ る と ,位 置 決 め 時 に 歯 の 遊 び 分 だ け 位 置 決 め 精 度 が 悪 く な っ た り ,歯 車 が 破 損 し や す く な る .こ の た め ,一 対 の 歯 車 を 滑 ら か に 無 理 な く 回 転 さ せ る た め に は ,適 切 な バ ッ ク ラ ッ シ が 必 要 で あ る . 特 に 歯 車 を 高 負 荷 ・ 高 速 回 転 で 運 転 す る と ,歯 車 の 騒 音 が 問 題 と な る こ と が あ る .こ の た め 騒 音 が 問 題 と な る と 以 下 の 歯 車 の 騒 音 を 小 さ く す る た め の 主 な 対 策 と る . (1) バ ッ ク ラ ッ シ の 適 切 化 ト ル ク 変 動 が 大 き い 場 合 な ど ,バ ッ ク ラ ッ シ が 大 き い と 騒 音 が 発 生 し や す い .こ の 場 合 ,バ ッ ク ラ ッ シ を で き る 限 り 小 さ く す る . (2) か み 合 い 率 の 増 加 か み 合 い を 大 き く す る ほ ど 静 か に な る .そ の た め に は ,回 転 比( 減 速 比 ,増 速 比 ) を 必 要 以 上 に 大 き く し な い .ま た ,平 歯 車 よ り ,は す ば 歯 車 の 方 が か み 合 い が 大 き く で き ,静 か に な る . (3) 歯 形 の 小 型 化 モ ジ ュ ー ル が 小 さ い ほ ど 静 か に な る .モ ジ ュ ー ル を で き る 限 り 小 さ く す る と よ い が ,強 度 は 弱 く な る の で 注 意 す る . (4) プ ラ ス チ ッ ク 歯 車 の 使 用 振 動 を 吸 収 し や す い プ ラ ス チ ッ ク 歯 車 を 用 い る こ と で 騒 音 を 防 止 で き る .軽 負 荷・低 速 回 転 で あ れ ば プ ラ ス チ ッ ク 歯 車 を 使 用 で き る . (5) 潤 滑 の 適 切 化 潤 滑 が 適 切 で な い と 騒 音 が 大 き く な る .一 般 に ,粘 度 の 高 い 潤 滑 油 の 方 が ,騒 音 は 小 さ く な る .
- 12 - 1 . 7 バ ッ ク ラ シ 補 償 法 機 械 の 位 置 決 め 精 度 の 高 精 度 化 のた め,バ ックラ ッシの小 さ くし た 要 求 が 増 加 し てい る.こ のバ ックラ ッ シを調 整 し 補 償 するこ と を 「 ノン バックラッシ」 ・ 「 バックラッシレス」 などと 呼 ぶ . 機 械 的 に 補 償 する 方 法 と し ては大 きく分 類 すると,(1)位 置 関 係 調 整 方 法 と(2)外 力 による歯 車 かみ合 い部 与 圧 調 整 方 法 の 2 つに 分 類 される. 1 . 7 . 1 位 置 関 係 調 整 方 法 (調 整 ・ 固 定 方 式 ) 歯 車 対 のバックラッシが小 さくなるような位 置 関 係 に歯 車 を調 整 し固 定 する方 法 である . この調 整 ・固 定 方 式 には,基 本 的 な 2 つの方 法 がある.それは,歯 車 を調 整 ・固 定 する方 法 と,中 心 距 離 を調 整 ・固 定 する方 法 であり,これらの組 合 せにより分 類 できる.2 9 ) 3 0 ) (1) 歯 車 対 のバックラッシ量 を調 べ,バックラッシが小 さくなる 歯 車 を製 作 し調 整 する方 法 4 0 ) 4 1 ) 4 2 ) 4 3 ) 位 置 関 係 が 調 整 できず 改 造 でき ない 条 件 で は 歯 車 自 体 の歯 型 をバッ クラ ッシが小 さ くなる よう に製 作 する. (2) 固 定 した中 心 間 距 離 で歯 車 の位 置 関 係 が調 整 可 能 な構 造 でバックラッシを小 さくする 方 法 4 4 ) 固 定 した中 心 間 距 離 で歯 車 の位 置 関 係 が調 整 可 能 な構 造 の場 合 ,歯 車 をかみ合 せた後 にバックラッ シが 小 さく なる よう 歯 車 を 回 転 させ て 調 整 し て から 歯 車 を 固 定 する 方 法 であ る . 原 理 的 に 片 側 方 向 の 回 転 に対 してバックラッシを小 さくする .歯 車 の種 類 に応 じて,調 整 方 法 が考 えられる. ① 平 歯 車 を 2 枚 重 ねにして,片 方 を回 転 方 向 にずらして調 整 する方 法 ② はすば歯 車 など,ねじれのある歯 車 を 2 枚 に分 割 して製 作 し,片 方 を軸 方 向 にずらして調 整 する方 法 ③ かさ 歯 車 やテ ーパギ ヤ, 複 リード ウォーム ギヤ など ,円 すい形 の 歯 車 を 軸 方 向 にずらして 調 整 する 方 法 これら 3 つの方 法 を図 1-7 に示 す. ①は回 転 移 動 式 ,② ③は平 行 移 動 式 である. (a)挿 入 式 (b) 平 行 ず ら し (1)回 転 移 動 式 (2)平 行 移 動 式
- 13 - (3) 歯 車 の中 心 間 距 離 が調 整 可 能 なでバックラッシを小 さくする 方 法 歯 車 のかみ合 い調 整 なしで,歯 車 の中 心 距 離 を調 整 可 能 な構 造 として,バックラッシを小 さくする方 法 である.中 心 距 離 を調 整 する方 法 としては,平 行 移 動 式 と回 転 移 動 式 の 2 つの方 法 が考 えられる. ① 平 行 移 動 式 : 歯 車 を中 心 距 離 が小 さくなる方 向 に平 行 移 動 してバックラッシを調 整 してから中 心 距 離 を固 定 する方 法 . ② 回 転 移 動 式 : 歯 車 の中 心 とは異 なる,偏 心 した回 転 中 心 を持 つ機 構 として,その偏 心 した回 転 中 心 を中 心 として歯 車 を回 転 させて ,中 心 距 離 を調 整 してから,この中 心 距 離 を固 定 する方 法 .偏 心 量 の大 小 により,その構 造 も多 少 異 なる. Fig. 1-8 中 心 距 離 を調 節 ・固 定 する方 法 1 . 7 . 2 外 力 に よ る 歯 車 か み 合 い 部 与 圧 調 整 方 法 外 力 による歯 車 かみ合 い部 与 圧 調 整 方 法 というのは,バックラッシを除 去 する為 の 外 力 を作 用 させバ ックラッシの位 置 関 係 を調 整 する方 法 である.この方 式 にも,位 置 関 係 を調 整 する方 式 と,中 心 間 距 離 を 調 整 する方 法 が考 えられる.5 ) 6 ) 7 ) 3 9 ) 4 0 ) 4 1 ) 4 2 ) 4 3 ) 4 4 ) (Ⅰ) バネなどで歯 車 の位 置 関 係 を与 圧 する 方 式 バネなどの力 で進 み方 向 に強 制 的 に歯 車 の歯 面 接 触 をさせてバックラッシを除 去 する方 法 である . ① 歯 車 の場 合 ,シザーズ ギヤ と呼 ばれることがある.歯 車 においては,相 手 の歯 車 に対 し ,かみ合 う同 形 ,同 軸 の歯 車 をバネ でトルクを与 え て( 予 圧 を与 えるという) バックラ ッシをなくす .自 動 車 用 エンジ ンなどの一 定 方 向 にしか回 転 しない事 例 では有 効 な方 法 である .トヨタのハイメカツインカムと呼 ばれ る方 式 の DOHC エンジンやスバルの EN07 型 エンジンのスーパーチャージャー付 DOHC エンジン (EN07X 型 )などで実 用 例 がある .シザーズスプリ ングにより ギヤを押 し つけてバックラッシを取 る ,自 動 車 用 エンジン の動 弁 系 の伝 動 ギヤハイ メカツイン カム用 バックラ ッシュレス・ シザーズ ギヤ( 特 開 昭 61-171959 ト ヨタ 自 動 車 ) や一 対 のラ ックアン ドピ ニ オン 又 はボ ー ルネ ジ 駆 動 機 構 でトー ションを 加 えた状 態 で駆 動 する運 動 機 構 (特 開 平 7-243502 メカニック設 計 事 務 所 )等 のことである. ② フリクションギヤの場 合 ,トルク変 動 が大 きい駆 動 装 置 におけるバックラッシ低 減 方 法 に ,主 ギヤよりも 歯 が1枚 少 ない薄 いギヤ を,それ自 体 が皿 バネとなるように製 作 し ,主 ギヤに押 しつける形 でセットす ることで,その間 のフリクションによりトルク変 動 を吸 収 しながらバックラッシを小 さくするとい う仕 組 みの もの.回 転 方 向 ( トルクの か かる方 向 ) を 問 わな いこ と ,コスト 的 に 有 利 なこ と で ,シザーズ ギヤに 勝 る 部 分 も多 い.マツダがトランスミッション等 に採 用 した例 がある . ③ ウォーム ギヤの歯 を両 側 から ローラ で挟 む方 法 とし て ,三 共 製 作 所 がウオー ムホイ ールの歯 を ロー ラーに置 き換 え(同 社 ではターレットと呼 ぶ) ,ウオームギヤ(同 じくローラーギヤカム)の歯 の山 を両 側 からローラーではさみ,バックラッシをなくした「ローラドライブ」を製 品 化 している .各 々は線 接 触 となり, 小 径 のローラーギヤカム ではすべりの影 響 をほとんど考 慮 する必 要 がないことから,伝 達 効 率 も高 い. (b) 回 転 移 動 式 (a) 平 行 移 動 式
- 14 - 産 業 用 ロボットのアーム類 において ,停 止 位 置 の精 度 向 上 に高 い効 果 がある . (Ⅱ)中 心 距 離 によるバックラッシ強 制 除 去 方 式 バネなどの力 により,強 制 的 にバックラッシを除 去 する方 法 がある. この方 法 では,バネなどの強 制 力 F の大 きさは,歯 に加 わる力 F 1 と摩 擦 抵 抗 力 F 2 の和 よりも大 き いことが必 要 である. F > F 1 + F 2 この強 制 力 F は小 さすぎれば,バックラッシを除 去 できない.また,大 きすぎると,歯 車 に予 圧 がかかり すぎて,歯 車 の摩 耗 とか寿 命 などに悪 い影 響 がでる.これら,バックラッシを強 制 的 に除 去 する歯 車 の強 度 計 算 においては,この予 圧 を考 慮 して設 計 する必 要 がある. 1 . 8 . モ ー タ に よ る バ ッ ク ラ ッ シ 自 動 調 整 機 構 同 一 出 力 軸 に対 するツインモータ制 御 技 術 とし て, ① 伊 藤 によるツインドライブ式 歯 車 装 置 系4 6 ) 4 7 ) 4 8 ) 4 9 ) 5 0 ) 5 1 ) 5 2 ) ② 大 石 らによるツインドライブシステムによる力 帰 還 型 摩 擦 フリーバイラテラルシステム 7 6 ) 7 7 ) 7 8 ) ③ 前 川 らによる2モータ式 ノーバックラッシュ駆 動 制 御 システム 7 3 ) 7 4 ) 7 5 ) が発 表 されている。①②③は回 転 駆 動 系 に ツインモータが適 用 され ているが,①は振 動 抑 制 ,②摩 擦 駆 動 系 における位 置 決 め制 御 ,③は正 転 用 と逆 転 用 にモータを 設 置 し位 置 決 めをしている点 が本 研 究 と異 なる点 である.本 研 究 においては,それぞれバックラッシ補 償 で多 段 歯 車 駆 動 系 を対 象 とし,ツインモ ータを同 一 駆 動 方 向 に用 い,最 終 位 置 決 め時 だけ拮 抗 動 作 するようバックラッシ補 償 する . 複 数 のモータ駆 動 等 によりバックラッシを補 正 する方 法 としては 特 許 情 報 から以 下 が挙 げられる. ① ツインモータによる荷 重 分 散 駆 動 の重 量 キャリッジの高 速 位 置 決 め用 装 置 (特 許 2726728 (特 公 表 平 4-500336) マイトロニック アクチポラゲット) ② ロボットの直 線 移 動 テーブル用 で停 止 期 間 中 差 動 モータがバックラッシ隙 間 を詰 める直 線 移 動 装 置 (特 開 2002-21964 デンソー) ③ CD の真 空 処 理 装 置 用 回 転 テーブルの送 り駆 動 歯 車 に対 して従 動 歯 車 で逆 戻 しすることでバックラ ッシを無 くす回 転 テーブルの駆 動 装 置 (特 開 平 9-257106 芝 浦 製 作 所 ) ④ パラボラアンテナの回 転 駆 動 装 置 の精 密 位 置 決 め で停 止 時 にクラッチをつなぎバックラッシを無 くす 歯 車 伝 動 による精 密 駆 動 機 構 (特 公 平 6-25578 三 菱 電 機 ) ⑤ マイクロフィルムの移 動 装 置 や IC の検 査 装 置 等 に使 用 される平 行 に配 置 された右 ネジと左 ネジの2 本 のリードスクリュを独 立 に駆 動 させバックラッシを取 る XY 移 動 機 構 (特 開 昭 54-142483 富 士 写 真 フィルム) これらの方 法 ではバックラッシ補 正 のため ,モータを追 加 して補 正 している . それに対 して本 論 文 では,駆 動 力 アップのため複 数 のモータを用 いつつ ,その追 加 されたモータでバッ クラッシ補 正 をする方 法 はない.本 研 究 する技 術 は,WO2010-103803(JP2010209975A /JP5371494B2 , CA2744181A1/CA2744181C, CN102149944A, EP2407690A1/EP2407690A4,
- 15 - 2 . バ ッ ク ラ ッ シ 影 響 の 解 析 2 . 1 本 章 の ね ら い 本 章 で は , バ ッ ク ラ ッ シ の 記 述 方 法 と 測 定 方 法 を 説 明 し , バ ッ ク ラ ッ シ の 記 述 方 法 が 妥 当 で あ る こ と を 示 し た 上 で , バ ッ ク ラ ッ シ の 力 学 モ デ ル を 示 す . 本 研 究 で 用 い る バ ッ ク ラ ッ シ の 記 述 方 法 は 既 に 提 案 さ れ て い る も の で あ る が ,バ ッ ク ラ ッ シ の 測 定 方 法 は JIS B 1705:2013 で は , ① ダ イ ヤ ル ゲ ー ジ を 用 い て 伝 達 す る 歯 車 間 の 片 方 を 回 転 さ せ て 測 定 ② 隙 間 ゲ ー ジ を 隙 間 に 入 れ て 測 定 が 上 げ ら れ て い る .2 3 ) こ こ で は 位 置 決 め に 必 要 な 精 度 分 解 能 を 有 し て い る 外 部 エ ン コ ー ダ が 取 り 付 け ら れ て い る こ と を 前 提 条 件 に , 実 用 的 な 位 置 決 め 時 の 歯 車 の 弾 性 変 形 を 考 慮 し た バ ッ ク ラ ッ シ を 測 定 す る 方 法 を 提 案 す る . ま た こ の 往 復 運 動 の 速 度 を 上 げ た 時 の 外 部 エ ン コ ー ダ 出 力 か ら 残 留 振 動 解 析 を 行 う . こ れ に よ り 歯 車 伝 達 時 の 回 転 運 動 特 性 を 明 確 に す る .
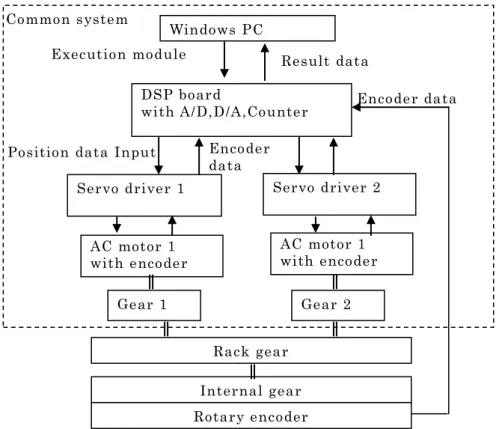
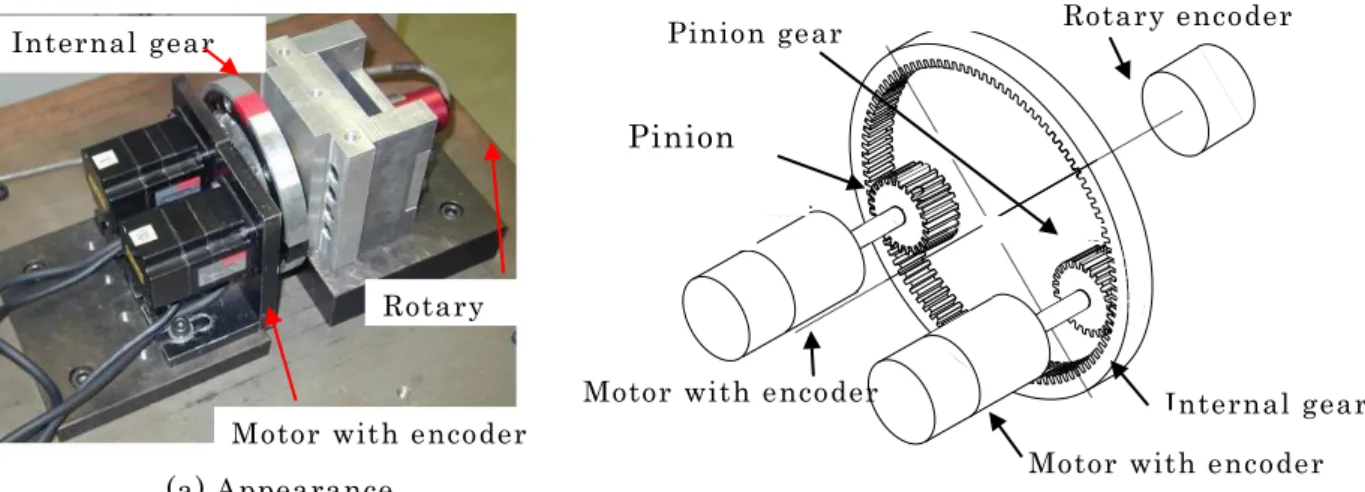
- 16 - 2 . 2 バ ッ ク ラ ッ シ 試 験 装 置 図 2-1 に 2 つのモータで制 御 するツインモータ駆 動 機 構 を示 す.インターナルギヤを持 つ被 駆 動 側 の 内 側 に 2 台 の駆 動 モータが対 称 関 係 に設 置 され,それぞれのモータ軸 に取 り付 けた平 歯 車 により駆 動 し ている.図 2-2 は回 転 駆 動 系 での応 用 例 ,図 2-3 は直 線 駆 動 系 で応 用 例 の外 観 である. 駆 動 モータには AC サーボモータを使 用 し,位 置 制 御 系 は DSP で各 モータからの位 置 信 号 を基 に位 置 制 御 を行 った上 で,そのモータ駆 動 ドライバに速 度 入 力 指 令 を与 え,モータ駆 動 ドライバ内 で,速 度 制 御 と電 流 制 御 を行 っている.
基 本 的 に,Windows PC 上 で Matlab Simlink でブロック線 図 で制 御 モデルを記 述 し,MTT 製 Pass Box にて TI 製 DSP が搭 載 された s-box 用 の実 行 ファイルを生 成 し ,Windows PC から DSP へ実 行 ファイルを ダウンロードする.
Pass Box では s-box の I/O 毎 に用 意 された I/O デバイスドライバ(s-Fanction ブロック)をリンクし Simlink coder の C コード生 成 機 能 によりブロックダイヤグラム全 体 を C コードに変 換 する.その上 で,その 得 た C コードを DSP 用 のコンパイラとリンカーでコンパイル・リンクし実 行 ファイルを生 成 し,生 成 した実 行 ファイルは TI 製 Code Composer Studio から DSP のある s-box にダウンロードする.
Fig. 2-1 Block diagram of backlash compensation system Windows PC
DSP board
with A/D,D/A,Counter
Result data Execution module
Servo driver 1 Servo driver 2
AC motor 1 with encoder AC motor 1 with encoder Gear 1 Gear 2 Rack gear Internal gear Position data Input Encoder
data
Encoder data Common system
- 17 -
(b) Appearance (a) Configuration Linear encoder
Rack gear Linear guide
Motor with Encoder Motor with Encoder (a) Appearance
Fig. 2-2 Experimental set-up of rotary-drive system
Internal gear Encoder 2 Servo Motor 2 Encoder 1 Servo Motor 1 Internal Gear Encoder 3 Pinion 2 Pinion (b) Configuration Rotary encoder Pinion gear
Motor with encoder Motor with encoder
Pinion gear
Motor with encoder Internal gear
Rotary encoder
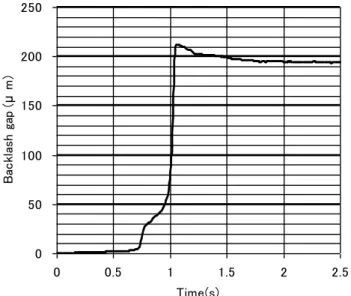
- 18 - 2 . 3 バ ッ ク ラ ッ シ 解 析 の 手 法 バックラッシ解 析 には図 2-4 の非 線 形 要 素 モデルを使 用 して,バックラッシ内 の空 走 挙 動 とギヤ接 触 後 の伝 達 を表 現 する.4 ) 9 ) 試 作 し た 図 2-3 の ツ イ ン モ ー タ で の 直 線 駆 動 型 位 置 決 め 装 置 を 用 い て ピ ニ オ ン ギ ヤ 付 サ ー ボ モ ー タ と ラ ッ ク ギ ヤ 間 に 存 在 す る バ ッ ク ラ ッ シ 量 を 測 定 し た .か み 合 い の 状 況 は 図 1 - 6 に 示 す . バ ッ ク ラ ッ シ の 測 定 方 法 は 1 台 の ピ ニ オ ン ギ ヤ 付 モ ー タ は 外 し ,も う 1 台 の ギ ヤ を 固 定 し た 状 態 で , ス ラ イ ド テ ー ブ ル を ば ね ば か り で 約 400mN の 力 が 一 定 に 作 用 す る よ う に 目 盛 り を 見 な が ら ,片 方 向 に 押 さ え つ け た あ と 反 対 方 向 に 引 っ 張 り ,そ の と き の リ ニ ア エ ン コ ー ダ 出 力 の 変 化 量 で バ ッ ク ラ ッ シ 量 を 測 定 し た . こ の 場 合 は 図 2 - 5 に 示 す 通 り , 195μ m(488 pulses) で あ っ た .
y
y
b
x
y
/
(
0
y
)
0
y
(
y
x
b
)
Fig. 2-4 Characteristic of backlash
y
b
b
-b
-b
xBacklash measurement by pull test 0 50 100 150 200 250 0 0.5 1 1.5 2 2.5 Time(s) B ac kl ash ga p ( μ m)
Fig. 2-5 Backlash measurement by pull test
0
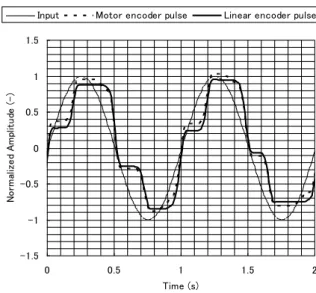
- 19 - 次 に 2π (rad/s)の 速 度 で 正 弦 波 駆 動 し て バ ッ ク ラ ッ シ 量 を 測 定 し た (図 2-6).正 弦 波 入 力 を し た と き 往 復 振 幅 の 上 端 下 端 の 両 端 の 工 程 で モ ー タ エ ン コ ー ダ 出 力 と リ ニ ア エ ン コ ー ダ 出 力 の ピ ー ク が 約 0.2~ 0.3s 間 平 坦 に な っ て い る こ と が 判 る .こ れ は バ ッ ク ラ ッ シ に よ る も の と 推 測 す る .ま た 途 中 の 駆 動 工 程 で は 約 0.1s 間 や 約 0.2s 間 ス テ ッ プ 状 の 駆 動 に な っ て い る こ と が 判 る . こ れ は モ ー タ の ト ル ク リ ッ プ ル に よ る も の と 推 測 す る . 図 2-7 に こ の 正 弦 波 駆 動 時 の モ ー タ の エ ン コ ー ダ 出 力 を 横 軸 に リ ニ ア エ ン コ ー ダ 出 力 を 縦 軸 に と っ た リ サ ー ジ ュ 波 形 で グ ラ フ 表 示 す る と ,平 行 四 辺 形 状 の 曲 線 と な り ,大 き さ と し て は 初 期 中 心 値 に 対 し て 負 側 の 幅 は -64~ -28(μ m)で 正 側 の 幅 は 92~ 132(μ m)で あ り , こ の 範 囲 内 を 動 い て い る こ と が 分 か っ た . こ れ は バ ッ ク ラ ッ シ に よ り ヒ ス テ リ シ ス に な っ た も の と 推 測 し , バ ッ ク ラ ッ シ 量 は 最 大 幅 か ら 196(μ m)で あ る と 推 定 で き る . こ れ は 先 の ば ね は か り を 用 い た 測 定 量 と ほ ぼ 一 致 す る .つ ま り 往 復 運 動 さ せ ら れ る 環 境 で は 正 弦 波 駆 動 に よ り 正 確 に 求 め る こ と が 可 能 で あ る . ま た モ ー タ エ ン コ ー ダ と リ ニ ア エ ン コ ー ダ と の 関 係 が 平 行 四 辺 形 状 の 曲 線 は バ ッ ク ラ ッ シ に よ る も の で あ り , 図 2-4 の よ う に 不 感 帯 要 素 が 近 似 で き る こ と が 判 る . -1.5 -1 -0.5 0 0.5 1 1.5 0 0.5 1 1.5 2 Time (s) N o rm al iz e d A m pl it u de ( -)
Input Motor encoder pulse Linear encoder pulse
Fig. 2-6 Characteristics by sine wave drive
Characteristics by sine wave drive -1500 -1000 -500 0 500 1000 1500 -3 -2 -1 0 1 2 3
Motor encoder (rad)
Li n e ar e n c o de r ( μ m)
- 20 -
こ こ で Matlab Simulink で バ ッ ク ラ ッ シ 解 析 す る 方 法 を 検 討 す る .8 8 ) 8 9 )
Matlab Simulink で は Backlash ブ ロ ッ ク が 準 備 さ れ て い る . Backlash ブ ロ ッ ク は , 入 力 と 出 力 の 変 化 を 等 価 に す る シ ス テ ム を 実 現 す る .た だ し ,入 力 の 方 向 が 変 化 す る と き は ,入 力 の 初 期 変 化 は 出 力 に 影 響 を 与 え な い . シ ス テ ム の 端 か ら 端 ま で の 遊 び の 量 は , "不 感 帯 " と 呼 ば れ , 不 感 帯 は , 出 力 の 中 央 に 位 置 す る .
同 じ よ う な 要 素 で Dead Zone ブ ロ ッ ク が あ る . Dead Zone ブ ロ ッ ク は , 指 定 さ れ た 領 域 内 に 不 感 帯 (dead zone) と 呼 ば れ る ゼ ロ 出 力 を 生 成 す る . 不 感 帯 の 下 限 (LL) と 上 限 (UL) は , [不 感 帯 の 下 限 ] と [不 感 帯 の 上 限 ] パ ラ メ ー タ ー と し て 指 定 す る . ブ ロ ッ ク 出 力 は 入 力 (U) と 下 限 お よ び 上 限 の 値 に よ っ て 異 な る .
こ こ で Backlash ブ ロ ッ ク の 出 力 と Dead Zone ブ ロ ッ ク の 出 力 の 違 い を 示 す .
Backlash ブ ロ ッ ク に 対 し て , 既 定 の パ ラ メ ー タ ー 値 (不 感 帯 幅 は 1 , 初 期 出 力 0) を 使 用 し た と き の 出 力 を 示 す . 入 力 が 不 感 帯 の 端 (0.5) に 達 す る ま で Backlash ブ ロ ッ ク の 出 力 は ゼ ロ で あ る . 入 力 と 出 力 が 噛 み 合 う た め ,入 力 が 1.0 で 方 向 を 変 え る ま で ,出 力 は 入 力 に 従 っ て 移 動 す る .入 力 が 0 に 達 す る と , 入 力 は 不 感 帯 の 反 対 側 の 端 で 再 び 出 力 と 噛 み 合 う . こ の 出 力 だ と 図 2-6 と 波 形 の 傾 向 が 異 な る .
Fig.2 -8 Output of Backlash block
Matlab Simulink で は Dead Zone ブ ロ ッ ク が 用 意 さ れ て い る . Dead Zone ブ ロ ッ ク 出 力 に 対 し て 正 弦 波 入 力 し , 下 限 と 上 限 に -0.5 と +0.5 を 設 定 し た と き の 正 弦 波 に 対 す る Dead Zone ブ ロ ッ ク の 出 力 で あ る . 入 力 正 弦 波 が –0.5 と +0.5 の 間 に あ る 場 合 , 出 力 は ゼ ロ で あ る . こ の Dead Zone ブ ロ ッ ク 出 力 の 方 が 図 2-6 と 傾 向 が 合 う . Time(s) A m p li tu d e ( -)
- 21 -
Fig.2 -9 Output of Dead zone block
こ の た め 本 研 究 で は , Matlab Simulink を 用 い て シ ミ ュ レ ー シ ョ ン を す る 場 合 , Dead Zone ブ ロ ッ ク を 用 い , 上 下 限 値 に バ ッ ク ラ ッ シ 幅 を 与 え る こ と と す る . A m p li tu d e ( -) Time(s)
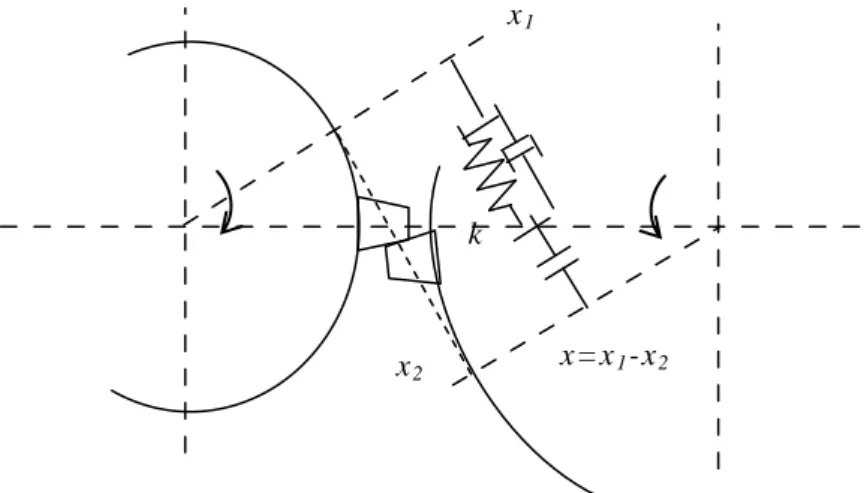
- 22 - 2 . 4 バ ッ ク ラ ッ シ の 力 学 モ デ ル 2 . 4 . 1 バ ネ - ダ ン パ 型 モ デ ル 一 対 の平 歯 車 のかみ合 いは,その質 量 m の歯 車 が,歯 の強 さkによる弾 性 変 形 と粘 性 係 数 D による 粘 性 減 衰 ,バックラッシ幅 ±bによる非 線 形 要 素 を考 慮 したモデルを 示 す.図 2-8 は回 転 系 システムでの 歯 車 のかみ合 い,図 2-9 はリニア駆 動 系 での歯 車 のかみ合 いである.これらの歯 車 のかみ合 いは共 に図 2-10 で表 す.このモデルにより,歯 車 1の位 置 x1と歯 車 2 の位 置 x2から伝 達 時 の力 学 モデルは以 下 のよ うになる.5 4 ) 5 5 ) 5 6 ) 5 7 ) 5 8 ) 5 9 ) 6 0 ) 6 1 ) 6 2 ) 6 3 ) 6 4 ) 6 5 ) 6 6 ) 6 7 ) 6 8 ) 6 9 ) 7 0 ) 7 1 ) 7 2 ) 7 9 ) 8 0 )
Fig. 2.10 Physical model of a gear pair
m2 k m1 x1 x2 ±x D
Fig. 2-8 Analytical model at tooth contact of a gear pair
x=x1-x2 k x1 x2 Kg Tg J1 J2
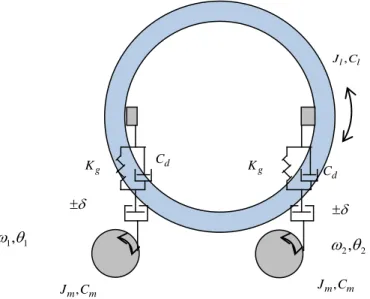
- 23 - 2 . 4 . 2 二 慣 性 モ デ ル ツイ ンモータ駆 動 で ,モータに直 結 されたピニ オン ギヤで共 通 の駆 動 となる ギヤ(ラックやイン ターナル ギ ヤ等 )を駆 動 することにより,バックラッシをなくす.このモデルも同 様 になる. ギヤの歯 の慣 性 に対 して歯 の剛 性 によるバネ定 数 ,歯 と歯 の隙 間 にある潤 滑 油 等 による粘 性 係 数 で移 動 ステージの慣 性 は力 学 的 にバランスされる .7 9 ) 8 0 ) 8 8 ) 8 9 ) これが回 転 型 ツインモータでも直 線 型 ツインモータ駆 動 系 でも同 じ形 となる . m2 k1 k2 k 1 m1 x1 x2
Fig. 2-12 Physical model of a linear stage
1 1,
m mC J , 2 2,
m mC J , g K Cd l l C J , g K d C- 24 - バネーダンパ型 モデルとして外 力 F1(t),F2(t)が 作 用 す る と す る と ,
)
(
)
(
1 2 1 2 2 1 1 1x
k
k
x
k
x
F
t
m
··· (2.1))
(
)
(
1 2 2 2 1 2 2 2x
k
x
k
k
x
F
t
m
··· (2.2) こ こ で 外 力 を 無 視 し て 得 ら れ る 線 形 方 程 式 は ,0
)
(
1 2 1 2 2 1 1x
k
k
x
k
x
m
··· (2.3)0
)
(
1 2 2 1 2 2 2x
k
x
k
k
x
m
··· (2.4) こ の 場 合 の 固 有 角 振 動 数 は ,m
m
1
m
2と し て ,m
k
1 1
,m
k
k
1 2 22
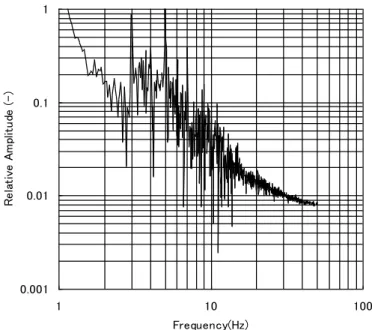
··· (2.5) と な る .- 25 - 2 . 5 バ ッ ク ラ ッ シ に よ る 残 留 振 動 解 析 図 2-6 の 正 弦 波 駆 動 時 の 外 付 け 高 精 度 エ ン コ ー ダ 出 力 か ら 周 波 数 分 析 を 行 な っ た (図 2-15).そ の 結 果 ,2 つ の 周 波 数 的 な 特 徴 が あ る こ と が 判 っ た .1 つ は 3Hz や 5Hz に バ ッ ク ラ ッ シ に 起 因 す る よ る 振 動 成 分 と , 6Hz や 7Hz に モ ー タ の ト ル ク リ ッ プ ル な ど に 起 因 す る 振 動 成 分 で あ る .1 4 1 ) 1 4 2 ) バ ッ ク ラ ッ シ が あ る 歯 車 の 場 合 , 歯 車 が バ ッ ク ラ ッ シ の 空 走 区 間 を 過 ぎ 駆 動 面 側 の 歯 車 に 接 触 す る と き 振 動 が 起 き る . こ れ は バ ッ ク ラ ッ シ を 有 す る ギ ヤ 駆 動 系 の 位 置 決 め 装 置 内 に 内 在 す る 多 段 歯 車 駆 動 系 に お け る ア イ ド ル 騒 音 ( ガ ラ 音 ) 問 題 で あ る . 0.001 0.01 0.1 1 1 10 100 Frequency(Hz) R e la ti ve A m pl it u de ( -)
- 26 - 2 . 6 本 章 の ま と め
本 章 では,バックラッシの記 述 方 法 としてバックラッシモデルを示 し ,Matlab Simlink では Dead-zone モデルで記 述 するのが良 いことを確 認 した. 先 ず ギ ヤ バ ッ ク ラ ッ シ に 関 し て は , 以 下 の 知 見 が 得 ら れ る . (1) ギ ヤ バ ッ ク ラ ッ シ は 不 感 帯 要 素 で 近 似 で き , モ ー タ を 正 弦 波 駆 動 す る こ と で バ ッ ク ラ ッ シ の 動 特 性 時 の 大 き さ を 測 定 す る こ と が で き る . (2) ギ ヤ バ ッ ク ラ ッ シ を 持 つ 駆 動 系 で 往 復 運 動 を 行 い , そ の 位 置 信 号 の 周 波 数 分 析 を 行 な う と 明 確 な 周 波 数 ピ ー ク を 観 察 す る こ と が で き , こ れ は バ ッ ク ラ ッ シ の 歯 打 ち 現 象 で 観 察 さ れ る ア イ ド ル 騒 音 ( ガ ラ 音 ) で あ る (3) ギ ヤ バ ッ ク ラ ッ シ 量 が 変 化 す る と , 見 か け 上 , 両 方 の ギ ヤ が 常 時 接 触 し な い 条 件 で も モ ー タ 動 作 が 拘 束 さ れ , モ ー タ 制 御 シ ス テ ム の 周 波 数 特 性 は 変 化 す る バックラッシの測 定 方 法 で は ,JIS では静 的 な 量 の測 定 方 法 し か規 定 されていないので, 位 置 決 めに 必 要 な精 度 分 解 能 を有 し ている外 部 エン コーダ が取 り付 けら れていることを前 提 条 件 に ,伝 達 軸 を往 復 運 動 させ,実 用 的 に高 精 度 位 置 決 め用 の外 部 エンコーダの出 力 を Y 軸 に取 り,モータ内 臓 のエンコーダ を X 軸 に取 ったリサージュ波 形 を用 いることによりバックラッシを測 定 する方 法 を提 案 した .これにより位 置 決 め時 の歯 車 の弾 性 変 形 を考 慮 したバックラッシ測 定 が可 能 となる . またこの往 復 運 動 の速 度 を上 げた時 の外 部 エンコーダ 出 力 から 残 留 振 動 解 析 を行 う .これにより歯 車 の歯 打 ち現 象 として現 れる振 動 ピークやモータの回 転 運 動 時 に生 じる回 転 ムラが明 確 になる .
- 27 - 3 . サ ー ボ モ ー タ に よ る 位 置 決 め に お け る バ ッ ク ラ ッ シ 解 析 3 . 1 本 章 の ね ら い 本 章 では,サーボモータの電 気 的 モデルを示 した 上 で,Matlab Simulink で制 御 ブロック線 図 での記 述 したフィードバックのシステム構 成 を示 す. 先 ず フ ル ク ロー ズド ル ー プ 制 御 系 と セ ミ ク ロー ズド ル ー プ 制 御 系 の 特 徴 を 考 察 し , バ ック ラ ッ シ 補 償 制 御 で好 適 なシステム構 成 を検 討 する. その上 で Matlab Simulink を用 いて制 御 系 の安 定 性 を根 軌 跡 法 にて ,フルクローズドループ制 御 系 と セミクローズドループ制 御 系 を解 析 しながら,応 答 性 シミュレーションを行 う. その結 果 を基 に,ツインモータ制 御 に好 適 なモータ制 御 方 法 として ,フルクローズドループ制 御 系 とセミ クローズドループ制 御 系 を組 み合 わせたフル&セミクローズドループ制 御 系 を提 案 し,その結 果 を示 す. そしてツインモータ制 御 時 の重 要 な制 御 ブロックに関 して考 察 し ,ツインモータ制 御 時 の挙 動 考 察 する .
- 28 - 3 . 2 モ ー タ 基 礎 方 程 式 基 礎 方 程 式 基 本 的 に機 械 的 特 性 を考 慮 すると DC モータか AC モータかの差 異 によらずに表 現 できるが ,一 連 の 考 え方 を示 すため,まず DC モータを用 いた基 礎 方 程 式 をまとめる .9 0 ) DC モータの電 機 子 回 路 に関 する 等 価 回 路 より,ブラシの電 圧 降 下 を無 視 すると, m E a a a a a
K
dt
di
L
i
R
v
··· (3.1) が得 られる.モータが機 械 的 に出 力 するトルクτmは, a T m
K
i
··· (3.2) このトルクが出 力 されたときの機 械 系 の運 動 方 程 式 は , L m mdt
d
J
··· (3.3) まず,式 (3.1)より, a a a m E a a a aL
v
L
K
i
L
R
dt
di
··· (3.4) 式 (3.2)式 (3.3)で,先 ず無 負 荷 時 はτL=0 とすることにより,J
i
K
J
dt
d
m m L T a
··· (3.5) 式 (3.1)の両 辺 に IAをかけると電 力 の平 衡 式 になる . m a E a a a a m a E a a a a a a aL
i
K
i
dt
d
i
R
i
K
dt
di
i
L
i
R
i
v
2 2 22
1
··· (3.6) この式 の左 辺 は電 源 から 供 給 される電 力 ,右 辺 第 一 項 はモータの電 機 子 巻 線 抵 抗 で消 費 される銅 損 , 第 二 項 はモータ巻 線 のインダクタンスに蓄 積 されるエネルギーの時 間 微 分 ,第 三 項 は機 械 出 力 に変 換 さ れる電 力 を表 している. このため,式 (3.2)の両 辺 にωmをかけると, m a T mK
i
··· (3.7) となり,式 (3.6)の第 三 項 と式 (3.7)は一 致 するはずなので, T EK
K
··· (3.8) となる.つまり,式 (3.4),式 (3.5),式 (3.8)より, a a m a E a E a a m av
L
i
J
K
L
K
L
R
i
dt
d
0
/
1
0
/
/
/
··· (3.9) が得 られる. また式 (3.1)~式 (3.3)をラプラス変 換 すると,)
(
)
(
)
(
)
(
s
R
I
s
sL
I
s
K
s
V
a
a a
a a
E
m ··· (3.10))
(
)
(
s
K
I
s
T
T a ··· (3.11)- 29 -
)
(
)
(
)
(
s
T
s
T
s
sJ
m
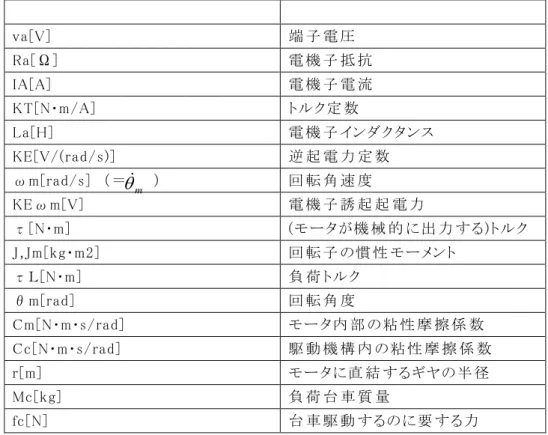
L ··· (3.12) となり,ブロック線 図 の係 数 が得 られる . 但 し,L[va]=Va[s],L[IA]=Ia[s],L[ωm]=Ωm(s),L[τm]=T(s),L[τL]=TL(s)である.Table 3-1 Symbol list of Motor drive model
va[V] 端 子 電 圧 Ra[Ω] 電 機 子 抵 抗 IA[A] 電 機 子 電 流 KT[N・m/A] トルク定 数 La[H] 電 機 子 インダクタンス KE[V/(rad/s)] 逆 起 電 力 定 数 ωm[rad/s] (= ) 回 転 角 速 度 KEωm[V] 電 機 子 誘 起 起 電 力 τ[N・m] (モータが機 械 的 に出 力 する)トルク J,Jm[kg・m2] 回 転 子 の慣 性 モーメント τL[N・m] 負 荷 トルク θm[rad] 回 転 角 度 Cm[N・m・s/rad] モータ内 部 の粘 性 摩 擦 係 数 Cc[N・m・s/rad] 駆 動 機 構 内 の粘 性 摩 擦 係 数 r[m] モータに直 結 するギヤの半 径 Mc[kg] 負 荷 台 車 質 量 fc[N] 台 車 駆 動 するのに要 する力 ここで状 態 変 数 xを,
Ti
x
··· (3.13) とすると,V
L
x
L
R
L
kg
J
g
J
K
x
m g
/
1
0
0
/
/
0
)
/(
0
0
0
1
0
2
··· (3.14) 電 機 子 電 流 ia[A] 電 機 子 抵 抗 Ra[Ω ] 電 機 子 インダクタンス La[H] 電 機 子 誘 導 起 電 力 KEωm[V] 端 子 電 圧 va[V]Fig. 3-1 Equivalent motor drive circuit of DC motor
m
- 30 - (1) 機 械 系 (1 自 由 度 回 転 系 ) 機 械 的 特 性 は,出 力 トルクτmとすると,ロータ負 荷 の慣 性 モーメント Jm,粘 性 摩 擦 係 数 Cm,外 力 トルク τe xより以 下 に表 される. ex m m m m m
C
dt
d
J
··· (3.15) 負 荷 トルクτLは,1自 由 度 機 構 が接 続 される系 では, L L L L L L LC
K
dt
d
J
··· (3.16) モータにギヤ比 1:nの減 速 機 を介 してを考 えると,θm=n・θL,ωm=n・ωL,n・τe x=τLと置 くと,
m L m L m L m m m m mn
K
n
C
dt
d
n
J
n
C
dt
d
J
1
1
1
1
··· (3.17) ここで, 2 1n
J
J
J
m
L , 1 2n
C
C
C
m
L , 1 2n
K
K
L とすると, m m m mC
K
dt
d
J
1
1
1 ··· (3.18) と簡 略 化 し,元 の式 と同 形 を保 つことができる. (2) 回 転 型 モータで駆 動 される 1 自 由 度 直 動 系 回 転 型 モータの回 転 運 動 をラック&ピニオンで直 動 運 動 に変 換 する機 構 を考 える . トルクτmはラック&ピニオンにて,r
f
m
m/
··· (3.19) と変 換 されるとすると,r
f
C
J
m
m
c ··· (3.20) c c c c cx
C
x
f
M
··· (3.21) 電 機 子 電 流 ia[A] 電 機 子 抵 抗 Ra[Ω ] 電 機 子 インダクタンス La[H] モ ー タ Jm[kg・m2] 端 子 電 圧 va[V]Fig.3-2 Equivalent motor drive circuit of DC motor
ギ ヤ 出 力 軸 Jg
モ ー タ 回 転 角 θ
- 31 -
r
x
c/
を用 い, 2/ r
J
M
M
c
m , 2/ r
C
C
C
c
m とすると,
M
x
C
x
r
r
f
r
x
C
r
x
J
m
c/
m
/
m
c
c
c
c ··· (3.22) m c cC
x
f
x
M
··· (3.23) が得 られる. ロータの慣 性 モーメン トや質 量 負 荷 の影 響 を考 慮 するため ,ラ グランジュの動 力 学 をバネ・マスダンパ系 で考 える. 質 量 mの台 車 が弾 性 係 数 kのバネと粘 性 係 数 cのダンパーで壁 に接 触 され ,力 f が与 えられたとすると, 一 般 化 力 F とすると,W=f・x より,f
x
W
F
··· (3.24)2
2x
m
K
,2
2kx
U
,2
2x
c
B
··· (3.25)2
2
2 2x
k
x
m
L
,m
x
dt
x
L
d
/
)
(
,kx
x
L
,c
x
x
B
··· (3.26) とおくことにより,f
kx
x
c
x
m
··· (3.27) となる. クーロン摩 擦 と粘 性 摩 擦 を考 慮 した摩 擦 トルクτf r i cは
C
c fricsgn(
)
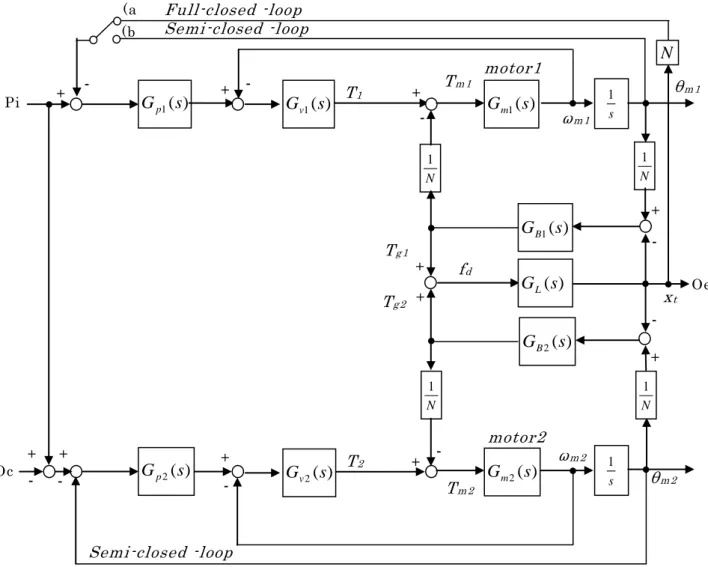
··· (3.28) となる.- 32 - 3 . 3 数 値 解 析 ツ ー ル を 用 い た 解 析 数 値 解 析 手 法 と し て は Matlab/Simulink を 用 い た .ツ イ ン モ ー タ で の 構 成 は 先 ず 各 伝 達 関 数 を G(s)で 一 般 化 し て 記 述 し ,メ イ ン モ ー タ 側 (motor1)と ス レ ー ブ モ ー タ 側 (motor2)を 同 一 ギ ヤ に 対 し て 駆 動 し , セ ミ ク ロ ー ズ ド ル ー プ 制 御 と フ ル ク ロ ー ズ ド ル ー プ 制 御 を 切 り 替 え 式 に し た 制 御 系 を 示 す .141) 表 3-1 か ら 表 3-4 に 今 回 使 用 し た 実 験 装 置 の パ ラ メ ー タ を 示 し ,実 験 デ ー タ は ラ ッ ク & ピ ニ オ ン の 間 に バ ッ ク ラ ッ シ が 0.189mm あ る 状 態 で 実 施 し た .
f
dTm1
ωm1
xt
ωm2
θm1
θm2
Tm2
motor1
motor2
Fig. 3-3 Total block diagram of twin motor control Pi Oe N 1
)
(
1s
G
p +-
+ s 1 N 1-
+ +-
+-
+ s 1-
+- -
+-
-
+ + + N 1 Oc N 1 (a ) (b )N
)
(
1s
G
vG
m1(
s
)
)
(
1s
G
B)
(s
G
L)
(
2s
G
B)
(
2s
G
pG
v2(
s
)
G
m2(
s
)
Tg1
Tg2
T1
T2
Semi-closed -loop
Semi-closed -loop
Full-closed -loop
- 33 -
Table 3-4 Simulation parameters
Name Symbol Value
Reduction ratio N 1
Motor moment of inertia Jm 0.063 10−4 kg·m2 Load moment of inertia Jl 0.63 10− 4 kg·m2 Motor damping coefficient Cm 0.02 N·cm·s/rad Load damping coefficient Cl 0.20 N·cm·s/rad Shaft damping coefficient Cd 0.01 N·cm·s/rad Position loop gain Kp 190
Integral gain of position Kp i 1 Velocity loop gain Kv 0.01 Integral gain of velocity Kv i 5
Torque loop gain Kt 1
Stiffness of torsion Kg 127 Ratio of linear encoder to motor
encoder
Ke 110
Table 3-2 Basic gear specifications of mechanism at rotary system Motor driving side : Spur gear Driven side : internal gear
Gear module : m=1 Gear module : m = 1
PCD : 28 mm PCD : 100 mm
Z :Number of teeth : 28 Z :Number of teeth : 100
Table 3-3 Basic motor specifications
Item Specification Item Specification Motor power 50 W Torque constant 1.39 N·m/A Rated speed (max) 3000 rpm Inertia 0.063 10−4kg·m2 Rated torque(max) 0.159 N·m Load inertia 0.63 10− 4kg·m2 Maximum speed 4500 rpm Weight 0.53 kg
Maximum torque 0.167 N·m Gear ratio 28/100 Table 3-1 Symbols of block diagram ( j: motor #, F: Backlash function) Symbol Element Transfer function
Gp j(s) Position Kp j+Kp i j/s Gv j(s) Velocity Kv j+Kv ij/s Gmj(s) Mass 1/(Jmj s+Cmj) GBj(s) Backlash Cd jS+Kgj +F GL(s) Load 1/(JL s+CL)