平成28年度 修 士 論 文
有限要素法における磁気ヒステリシスの一考慮法の提案と
磁性材料を用いた素子への適用
指導教員 石川 赴夫 教授
群馬大学大学院理工学府 理工学専攻
電子情報・数理教育プログラム
田中 恵悟
1
目次
1. 序論 1.1 研究背景 1.2 研究目的 2. ヒステリシス取り扱い方 2.1 磁気ヒステリシス 2.2 ヒステリシス近似方法 2.3 ループ上での動作 3. 有限要素解析 3.1 電流センサ 3.1.1 電流センサ原理 3.1.2 フィードバック方法 3.1.3 コイルの分割数による精度 3.1.4 磁気ヒステリシスを考慮した解析 3.1.5 過渡応答を考慮した解析 3.2 DC/DC コンバータ 3.2.1 動作原理 3.2.2 実測値と近似値 3.2.3 DC/DC コンバータへの適用 4. 結論 4.1 まとめ 4.2 今後の課題 謝辞 参考文献2
1. 序論
1.1 研究背景
現在,磁性材料の特性を利用した素子が数多くの電気機器に用いられ,実用化 されている。科学技術の進歩によって,より精度の高い情報を必要とする高度な システムや制御技術が多く用いられてきており,素子のひとつにしても高精度 化が求められてきている。しかし,磁性材料の特性として磁気ヒステリシス,渦 電流,磁気飽和などがあり,応答や出力に影響を与えてしまうことがある[1][2]。 磁性材料を利用した素子の 1 つとして高精度に電流を測るためにホール式電 流センサが広く使われている。このセンサは軟磁性材で環状のコアを作り,そこ にギャップを設けホール素子を挟んでギャップ磁束密度を常に 0 になるように 打ち消し電流を流し,これを検出電流としている。しかし,コアに磁性材料が用 いられており磁気ヒステリシス特性により,センサ出力に誤差を与えてしまう という問題がある。例えば,EV 用電池では充電量を充放電電流の積分で求める が,磁気ヒステリシスから生じる零点の問題で充電量に誤差が生じる。このため 充電量の適切な管理ができず,電池の劣化や走行時の電力不足が生じる危険性 がある。Pankan らはホール式電流センサのフィードバック回路の調査や設計を 行い,電流の精度において二次効果(センサの飽和,渦電流,電源歪み)を調査 した。そして電流センサの精度を改善するためにセンサやフィードバック回路 の設計を提案している[3]。本論文では出力の精度に影響を与える磁気ヒステリ シスに着目し,電流センサにおける磁気ヒステリシス現象の解明及び影響を調 査していく。 ヒステリシスのモデリング手法としては,多数の磁気双極子の集合体として 表 現 さ れ る 強 磁 性 体 を, 各 々 が 角 形 ヒ ステ リ シ ス 特 性 を 持 つも の と す る Preisach モデル[4],磁壁移動によるヒステリシスを考慮したモデルである Jiles-Atherton モデル[5]などの多数の方法が提案されている。しかし,それら の方法は多くのパラメータを必要とし,複雑な計算をする方法である。そこで市 販の磁場解析ソフトJMAG を用い,まだ紹介されていない飽和磁束密度,残留 磁束密度及び保磁力の3つのパラメータだけを用いシグモイド関数で磁気ヒス テリシスを近似する新たな解析手法を提案し,その手法を電流センサ,DC/DC コンバータに適用し,磁気ヒステリシスによる影響を検討していく。3
1.2 研究目的
本論文では,磁気ヒステリシスの取り扱いと,ギャップ磁束密度に応じて電流 を変える外部回路の両方をJMAG と連成させる方法を提案する。ヒステリシス カーブの近似方法として,材料の特性として入手しやすい飽和磁束密度,残留磁 束密度及び保磁力の 3 つのパラメータを用いて簡易的に表すためにシグモイド 関数を用いる。そして提案した解析方法を電流センサ,DC/DC コンバータに適 用し,磁気ヒステリシスを考慮した解析を行い,その影響を検討することを目的 とする。4
2. ヒステリシス取り扱い方
2.1 磁気ヒステリシス
磁気ヒステリシス
磁気ヒステリシスとは,磁性体のもつ特性のひとつである。磁性体を磁界の中 におくと,それ自体が磁気を帯びる。磁界を強くしていくと0 点から,初磁化特 性上を通りある一定値の磁束密度で飽和する。これを飽和磁束密度という。その 時点から磁界を弱めていくと,初磁化特性上を通らず磁束密度が減少しにくく なる。磁界が 0 になっても磁束密度は 0 にならず,このときの磁束密度を残留 磁束密度という。また磁束密度が 0 になったときの磁界を保磁力という。この ように磁界を強くしていくときと弱くしていくときで異なるループを通る。こ の現象を磁気ヒステリシスと言い,磁界を逆方向も含め交互にかけたときの曲 線のことを磁気ヒステリシスループと呼ぶ。 図2.1. 磁気ヒステリシスループ5
2.2 ヒステリシス近似方法
磁場解析ソフトJMAG と磁気ヒステリシスを考慮した磁性材料を連成させる ためにJMAG 内の機能である,磁化特性の非線形性や異方性を定義できるユー ザーサブルーチンmagusr[6]を用いて C 言語で磁性材料を設定していく。 図2.2.より,H=0 でμ=∞,B=0 で v=∞となるのでμあるいはv は扱えない。 そこでよく知られているように磁化特性を次式で表し M,∂M⁄∂B を用いて磁 気ヒステリシスを考慮する。 𝑯(𝑩) = 𝑩 𝜇0+ 𝑴(𝑩) (1) 𝜕𝑴 𝜕𝑩 = 1 𝜇0+ 𝜕𝑯 𝜕𝑩 (2) 図2.2. 磁化特性のμとv H [A/m] ν Hc μ 0 P1 P1 B [T] ν Br μ 0 P1 P16
ヒステリシス近似
材料特性として入手しやすい飽和磁束密度Bmax,残留磁束密度Br,保磁力 Hcの3つのパラメータを用いシグモイド関数でヒステリシスループを近似す る。 図2.3.より 1 が初磁化特性,2 が下降中のメジャーループ,3 が上昇中のメ ジャーループである。図2.4.はマイナーループを表したものであり,4 が下降 中のマイナーループ,5 が上昇中のマイナーループである。そして用いる式 B,H,M の x,y,z 成分を B,H,M で表すと, 𝐵1 = 2𝐵max{ 1 1 + 𝑒−𝛼𝐻 − 0.5} (3) 𝐵2 = 2𝐵max{ 1 1 + 𝑒−𝛼(𝐻+𝐻c)− 0.5} (4) 𝐵3 = 2𝐵max{ 1 1 + 𝑒−𝛼(𝐻−Hc)− 0.5} (5) 𝐵4 = 2𝐵max{( 1 1 + 𝑒−𝛼(𝐻+𝐻c)− 0.5 + 0.5) fac − 0.5} (6) 𝐵5 = 2𝐵max{( 1 1 + 𝑒−𝛼(𝐻−𝐻c)− 0.5 − 0.5) fac + 0.5} (7) 𝛼 = − 1 𝐻clog { 2 1 + 𝐵r⁄𝐵max− 1} (8) このときαは傾きを変更し,fac は倍率である。7 次に先ほどの(3)式から(7)式を変更し JMAG での解析に用いる,磁気 特性の非線形反復計算で必要となる𝑀,∂𝑀 ∂𝐵⁄ を次式で表す。 𝑀1 = 𝐵 − 𝜇0[1 𝛼log { 1 𝐵 2𝐵⁄ max+ 0.5− 1}] (9) 𝜕𝑀1 𝜕𝐵 = 1 − 𝜇0 (1 + 𝑒−𝛼𝐻)2 2𝐵max∙ 𝛼 ∙ 𝑒−𝛼𝐻 (10) 𝑀2 = 𝐵 − 𝜇0[1 𝛼log { 1 (𝐵 2𝐵⁄ max) + 0.5− 1} − 𝐻𝑐] (11) 𝜕𝑀2 𝜕𝐵 = 1 − 𝜇0 (1 + 𝑒−𝛼(𝐻+𝐻𝑐))2 2𝐵max∙ 𝛼 ∙ 𝑒−𝛼(𝐻+𝐻𝑐) (12) 𝑀3 = 𝐵 − 𝜇0[1 𝛼log { 1 (𝐵 2𝐵⁄ max) + 0.5− 1} + 𝐻𝑐] (13) 𝜕𝑀3 𝜕𝐵 = 1 − 𝜇0 (1 + 𝑒−𝛼(𝐻−𝐻𝑐))2 2𝐵max∙ 𝛼 ∙ 𝑒−𝛼(𝐻−𝐻𝑐) (14) 𝑀4 = 𝐵 − 𝜇0[1 𝛼log { 1 {(𝐵 2𝐵⁄ max) + 0.5} fac + 0.5 − 0.5 − 1} − 𝐻𝑐] (15) 𝜕𝑀4 𝜕𝐵 = 1 − 𝜇0 (1 + 𝑒−𝛼(𝐻+𝐻𝑐))2 2𝐵max∙ 𝛼 ∙ fac ∙ 𝑒−𝛼(𝐻+𝐻𝑐) (16) 𝑀5 = 𝐵 − 𝜇0[1 𝛼log { 1 {(𝐵 2𝐵⁄ max) − 0.5} fac + 0.5 + 0.5 − 1} + 𝐻𝑐] (17) 𝜕𝑀5 𝜕𝐵 = 1 − 𝜇0 (1 + 𝑒−𝛼(𝐻−𝐻𝑐))2 2𝐵max∙ 𝛼 ∙ fac ∙ 𝑒−𝛼(𝐻−𝐻𝑐) (18)
8 図2.3. 初磁化特性とメジャーループ 図2.4. メジャーループとマイナーループ
H [A/m]
B
[
T
]
B
rH
cB
max1
2
3
H [A/m]
B
[
T
]
B
maxH
cB
r4
5
9 図 2.5.は電磁鋼板 35A300 のメジャーループと下降曲線の Epstein 測定器に よって測定された結果(測定データ提供:新日本製鐵株式会社)[7]を示す。下降 曲線であるので図 2.4.とマイナーループ 4 と比較すると,実際の磁性材料から 得られた磁気ヒステリシス特性とメジャーループからの下降するマイナールー プは似ているものとなっている。これによりシグモイド関数での近似は,ほぼ妥 当である。 図2.5. 電磁鋼板 35A300 のメジャーループと下降曲線
10 また図2.6.に示すように磁束密度B が飽和磁束密度 Bmaxを超えてしまった場 合,次の式を用いて傾きをμ0になるようにする。 𝑀 = 𝐵max− 𝜇0𝐻max (19) 𝜕𝑀 𝜕𝐵 = 0.0 (20) 図2.6. Bmaxを超えたときの磁化特性
H [A/m]
B
[
T
]
B
maxH
max slope=μ011
2.3 ループ上での動作
磁化特性上のヒステリシスループの切り替えを取り扱うために,図 2.7.で示 すように,どのヒステリシスループ上にいるかという情報 kind,及び,マイナ ーループの式を表すfac とそれを計算するための H を保存させておく。kind に ついて図2.8.を用いて,磁気特性上の磁化状態の動きを説明する。初磁化特性上 に磁化状態があるとき,上昇中であればkind=1,下降中であれば kind=-1 とい う情報を各要素の磁化状態x,y,z の 3 成分に持たせておく。ここで,n が現在 のステップ,n-1 が 1 つ前のステップとする。1 つ前のステップでの状態が上昇 中である P0点にあるとき,磁束密度がそのまま上昇すれば kindn-1と変わらず kindn =1 のまま,上昇中の初磁化特性であり P1方向へ上昇する。しかしP0上 で磁束密度が下降したとき,kindn =4 となりヒステリシスのマイナーループ上 に乗りP2方向へ下降していく。また,マイナーループ上のP4にあるとき,その まま下降していけばP5方向へと下降していく,しかし磁束密度が上昇したとき kindn=5 となり P6方向へと上昇し,下降するマイナーループから上昇するマイ ナーループへと磁化特性を変更する。これにより連続して解析を行うことがで きる。ここで前ステップの状態P4はループの種類kindn-1と式(6)(7)を表すため の fac,n-1と H,n-1 で指定することができる。そして,現在のステップの状態 P5 あるいはP6はループの種類kindnと式(6)(7)を表すための facnと H,n で指定で きる。12 図2.7. ヒステリシスループの種類 kind 図2.8.ヒステリシスループ上での動き
H [A/m]
B
[
T
]
B
rH
c5
4
1
2
3
-1
H [A/m]
B
[
T
]
P
05
4
1
P
1P
4P
2P
5P
613 以上の考え方で,マイナーループをうまく扱えるか示すためにユーザーサブ ルーチンmagusr を作成し,Bmax=1.2T とし,磁束密度 B を次式で変化させた ときの動作を図2.9.に示す。0<i<300 のとき 𝐵 = 0.005i × sin 2𝜋 100i (21) 300≦i<500 のとき, 𝐵 = (1.5 − (𝑖 − 300) ∙ 0.005i) × sin1002𝜋 i (22) 図より磁束密度 B は原点からスタートし,初磁化特性からマイナーループに 入り,マイナーループからマイナーループにも切り替り上昇と下降を繰り返し ていることが分かる。また,磁束がBmaxを超えて飽和しているときの磁化特性 も表すことができている。これより,材料の磁化特性の切り替えはうまくいって いると考えられ,アルゴリズムが妥当であることが確認された。このmagusr を 実際にJMAG に連成させる。 図2.9. 実際に磁束密度を与えたときの動き
H [A/m]
B
[
T
]
B
maxH
cB
r14
3. 有限要素解析
有限要素法とは,無限の自由度を持つ連続体をある指定された有限個の未知 量を含む部分領域,あるいは要素の集合体を用いて近似し,工学問題を解くひと つの解析手法である 有限要素法は実際には複雑な形状・性質を持つ物体を,単純な形状・性質の要 素に分割し,その1つ1つの要素の特性を数学的な方程式を用いて近似的に表 現し,この単純な方程式を組み合わせ,すべての方程式が成立する解を求めるこ とによって全体の挙動を予測しようとするもの。 特徴 1) 構造体の形状が複雑であったり,複数の材料で構成されたものにでも簡 単に適用することができる。 2) 各種の条件に対して,全く同様の計算手法で解析ができる。 3) 原理が比較的簡単で,理解しやすく,異なる種類の解析に対し,ほとん ど同様の手法で適用できる。 図3.1.有限要素法15
3.1 電流センサ
3.1.1 電流センサ原理
磁気平衡式電流センサ
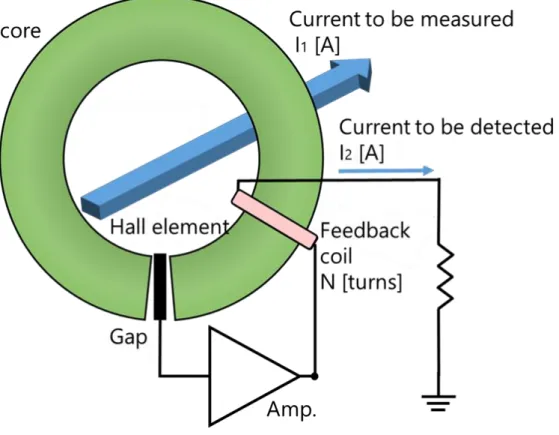
磁気平衡式とは,被測定電流によって発生した磁束を常にゼロになるように, フィードバックコイルに検出電流を流し,被測定電流を検出する方式である。そ の磁束の検出方法には,ホール素子,巻線検出,フラックスゲートなどあるが, 本論文ではホール式電流センサに着目していく。 ホール式電流センサの原理を図3.2.に示す。コアの中心に被測定電流を流し, コアのギャップ内にホール素子を配置し,コアの回りにN 巻のフィードバック コイルを巻く。被測定電流によってギャップに発生した磁束をホール素子によ って検出し,ホール効果により電圧に変換される。その電圧をアンプにより増幅 し,ギャップの磁束を打ち消すように検出電流を流す。被測定電流によって生成 生成させる磁束と検出電流生成させる磁束がギャップの磁束を打ち消しあい, ギャップの磁束を限りなく 0 に近づけたときのフィードバックコイルに流れる 検出電流は,被測定電流に流れる電流の 1/N となる。このフィードバックコイ ルに流れる電流を電流検出値として出力する。 磁気平衡方式のメリットを以下にまとめる。 <線形な出力特性> 磁気平衡方式は,検出電流で発生する磁束により常にギャップ内の磁束密度が 0 の状態で検知システムが動作するため大電流でも磁気飽和が起こらない,また この原理より,ホール素子の線形性の良し悪しにも関係なく,センサ出力の線形 性は常に良好な状態を保持することが可能となる。大電流時においても原理上 は完全に線形な出力特性となる。 <安定した温度特性> また,高磁界中におけるホール素子のゲイン特性には温度依存性があり,温度 上昇などの変化に伴い検知制度も変動してしまうが,磁気平衡方式において,原 理上,オフセットの温度特性にしか影響されないために,総合的な温度特性が良 好で,広い温度範囲で高精度な検知能力を発揮することが可能となる。16
17
ホール効果
電流が流れている物体に磁場を掛けると荷電粒子がローレンツ力の影響によ り移動し,それにより物体内に電位差を生じる。この現象をホール効果という。 図3.3.のような直方体の物体を考える。電流 I が流れている方向に対し,垂直に 磁束密度 B を掛けるとする。すると,荷電粒子がローレンツ力の影響を受け, 片側の面に集まる。これにより,片方の面が負に帯電し,両側の面に電位差が生 じる。これをホール効果といい,ホール効果によって発生した電位差をホール電 圧𝑉𝐻という。 ホール電圧𝑉𝐻について求める。図のように電流をI,磁束密度を B,資料の厚 さをD とすると, 𝑉𝐻 = 𝑅𝐻𝐼𝐵 𝐷 (23) となる。𝑅𝐻はホール定数で物質や温度によって変化する。 𝑅𝐻 =𝑉𝐻𝐷 𝐼𝐵 = 1 𝑞𝑛 (24) である。q はキャリアの電荷であり,n は電子密度である。この式より𝑅𝐻が負で あればn 型半導体,正であれば p 型半導体である。 図3.3.ホール効果 Current 𝐼 Magnetic flux B D18
解析基本モデル
電流センサの解析に用いるモデルは3DCAD ソフト SolidWorks によって作 成し,図3.4.のようなものとした。コアの内径は 80mm,外径は 120mm,ギ ャップは2mm と大きなものを対象としているが,今後の実験を考慮したもの であり,得られた結果は定性的に妥当と考えている。このモデルにコイルをコ アの周りに配置し,直列接続しギャップの磁束を打ち消すような検出電流を流 していく。 今回,コアに設定する材料は,透磁率の高いものが適している。 図3.4.基本モデル 図3.5.コアの寸法19
3.1.2 フィードバック方法
磁場解析ソフトJMAG でのフィードバック方法を説明する。C++または時 刻ステップ毎に電流値,電圧値を定義できるユーザーサブルーチンusrisrc, usrvsrc を用いて C 言語でフィードバックを模擬していく。ギャップ中心にホ ール素子があると仮定し,その要素の磁束密度を1 ステップごとに読み取り, そのデータをもとに検出電流の値を変化させ,実際の電流センサを模擬したか たちで磁束密度を打ち消し,0 に収束するような検出電流を求める方法であ る。そのとき用いる式は次のとおりである。 𝐼2,n = 𝐼2,n−1− 𝐵gap,n−1 6.18𝑒 − 004 (25) 𝑉2,n = 𝑉2,n−1− 𝑅 ∙ 𝐵gap,n−1 6.18𝑒 − 004 (26) 𝐵gap,𝑛−1:n-1 ステップ目のギャップ磁束密度のθ成分 𝐼2,𝑛:n ステップ目の検出電流 𝑉2,𝑛:n ステップ目の電圧 R:巻線抵抗20
3.1.3 コイルの分割数による精度
C++によるフィードバック解析を用い,コイルの分割数を変更しそのときの 電流センサの精度について検討する。解析モデル
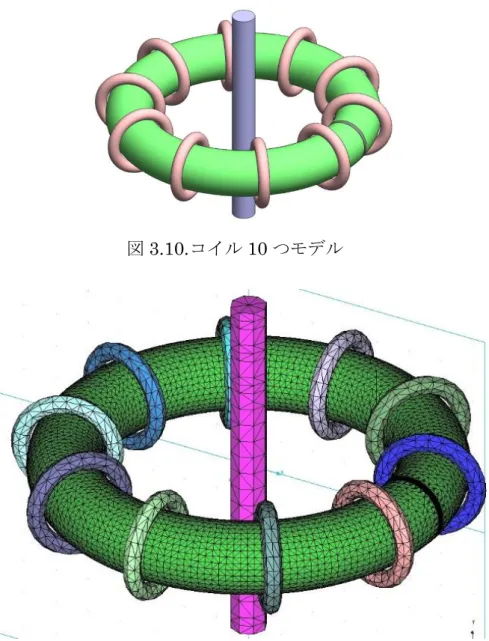
基本モデルにコイルを2 個,4 個,6 個,8 個,10 個設置した各モデルにつ いての解析を行い,比較していく。またモデルの図を以下に表す。 コイル 10 個モデルのメッシュ後の図 3.11 に示す。メッシュの大きさはギャ ップ0.5mm,コア 2mm,コイルなど 5mm とした。コイルの巻数 N は合計 1000 巻になるように設定する。例えば4 個モデルならひとつのコイルに 250 巻,10 個モデルなら100 巻となるように JMAG で設定する。 図3.6.コイル 2 つモデル 図 3.7.コイル 4 つモデル 図3.8.コイル 6 つモデル 図 3.9.コイル 8 つモデル21
図3.10.コイル 10 つモデル
22
解析条件
被測定電流I1を200A から 800A まで 200A 刻みで一定に流し,そのときに 流れる検出電流I2を求めた。そして,被測定電流I1に対する検出電流I2の誤 差をI1-NI2として表した。今回ギャップ磁束密度の絶対値が10-8以下になっ たとき収束したと判断する。 また今回の解析においてコアの材料はMn-Zn フェライト 7500 とし,材料特 性は図3.12.のようになっている。この材料の特徴としては次のようになって いる。 特徴 ・透磁率が高い ・電気抵抗が高い ・高周波数領域での渦電流損失が小さい ・複雑な形状を作りやすい 図3.12. Mn-Zn フェライト 7500 磁化特性
23
解析結果
コイル 2 個の場合,ギャップの磁束密度はほぼ 0 の値に収束しなかった。他 のコイルの個数では収束した。このことより,コイルの分割数が少ないとコアの 磁束を打ち消しきれず,ギャップの磁束密度をほぼ 0 に収束させることができ ないと分かった。 また,図3.13.はコイルの分割数をパラメータとしたときの被測定電流に対す る誤差 I1-NI2のグラフである。図より,どのコイルの分割数においても被測定 電流を大きくするにつれて誤差が比例して大きくなることが分かる。また,分割 数を多くすると誤差が小さくなることが分かる。この原因としてコイルの分割 数を増やすとコアの磁束を打ち消す箇所が多くなり,コアの磁束を全体的に打 ち消せたためであると考える。これよりコイルの分割数を増やすと精度が良く なると分かった。 図3.13. コイルの分割数での誤差の比較24
3.1.4 ヒステリシスを考慮した解析
JMAG とヒステリシス解析
JMAG で,二章で説明した磁性材料をユーザーサブルーチン magusr で設定 し,磁気ヒステリシスを考慮した解析を行えるか確認する。飽和磁束密度 Bmax=1.2T,保磁力 Hc=500A/m,残留磁束密度 Br=0.8T と仮定し magusr を 磁性材料に設定した。このとき設定されたヒステリシスループのメジャールー プとマイナーループは図 3.14.のようになった。今回 JMAG でヒステリシスを 考慮した解析を行えるか確認するだけなので,被測定電流 I1だけ流し検出電流 I2は流さないように設定し解析を行った。 図3.14. 近似した磁気ヒステリシスループ
M
ag
n
et
ic
f
lu
x
d
en
si
ty
(
T
)
Magnetic field (A/m)
-2000
-1000
0
1000
2000
-1
0
1
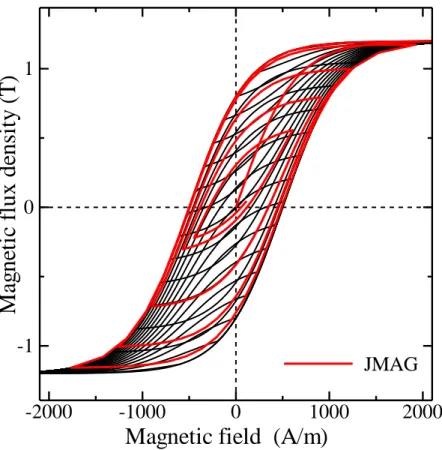
25 被測定電流I1を図3.15.のように流す。設定したメジャーループ,マイナール ープ上を通るか,またメジャーループからマイナーループ,マイナーループから マイナーループに磁化特性の変更を行え,連続した解析を行えるか確認した。 コアのヒステリシスループである磁束密度と磁界を図3.16.に示し,赤い線が 解析結果である。図より,初磁化特性から一度飽和させ,電流を減少させ磁界が 弱くなったとき,ヒステリシスループのメジャーループ上を通っていることが 分かる。次に,電流を増加させ磁界が強くなると,メジャーループの途中からマ イナーループに移ったことが分かる。さらに,電流を減少させ磁界が弱くなった とき,マイナーループからマイナーループに移っていることが分かる。その後, 電流を増減させても連続して解析を行えることを確認した。 図3.15. 電流変化
26 図3.16. 近似線と解析結果の比較
M
ag
n
et
ic
f
lu
x
d
en
si
ty
(
T
)
Magnetic field (A/m)
JMAG
-2000
-1000
0
1000
2000
-1
0
1
27
フィードバック解析
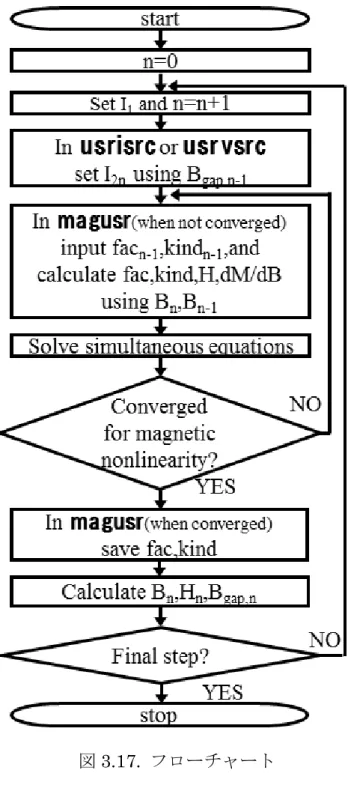
そして,本論文の目的である磁気ヒステリシスを考慮した解析とフィードバ ックを模擬した解析の両方をJMAG と連成させて解析を行う。その解析のフロ ーチャートが図3.17.である。 フローチャートについて説明をする。まず,JMAG で解析を始め,n ステッ プ目の解析が始まったとする。まず被測定電流 I1が変更され,ユーザーサブル ーチンusrisrc[6]または usrvsrc[6]を呼び出してギャップ中心の磁束密度を入手 し,その値に応じて検出電流 I2を算出し電流を流す。次にユーザーサブルーチ ンmagusr が icound=1 の状態で呼び出され磁化特性を設定する。このとき n-1 ステップ目に保存してあった磁化曲線の倍率 fac n-1 と,どの磁化状態にあるか という情報kindn-1を入手,そしてn ステップ目と n-1 ステップ目の磁束密度を 使い,fac,kind,磁界 H,設定する磁化特性の磁化 M,また磁化 M の微分 dM/dB を算出していく。そして有限要素法の連立方程式を解き,非線形収束してなけれ ば,再びmagusr が icound=1 で呼びだされ同様の計算を行い,非線形収束する まで繰り返す。このときの非線形収束計算はプログラムにエラーなどが生じな ければ必ず収束する。非線形収束した場合はmagusr が icound=2 の状態で呼び 出されfac,kind,などの情報を保存し,磁束密度 Bn,磁界Hn,ギャップの磁 束密度 Bgapなどを算出する。そして,最終ステップになるまで解析を繰り返し ていく。このようなフローで解析を行っていく。28
29
解析条件
今回,解析するモデルは10 個モデルにした。前述でコイルの分割数が多いと ギャップの磁束を打ち消し,より0 に近づけることができるからである。また, 材料は実機を作ることを考えて透磁率の高い日立金属の Mn-Zn フェライト MQ10T にした。この材料の特性は以下のようになっている。 • 初透磁率 μi=10000 • 飽和磁束密度 Bmax= 390 mT • 残留磁束密度 Br= 100 mT • 保磁力 Hc= 4.8 A/m 3 つのパラメーターを用いてシグモイド関数で磁気ヒステリシスを近似した ときのメジャーループとマイナーループは図3.18.のようになる。この材料特性 をJMAG に入力し解析を行う 図3.18. Mn-Zn フェライト MQ10T のヒステリシスループM
ag
n
et
ic
f
lu
x
d
en
si
ty
(
T
)
Magnetic field (A/m)
-50
-25
0
25
50
-0.4
-0.2
0
0.2
0.4
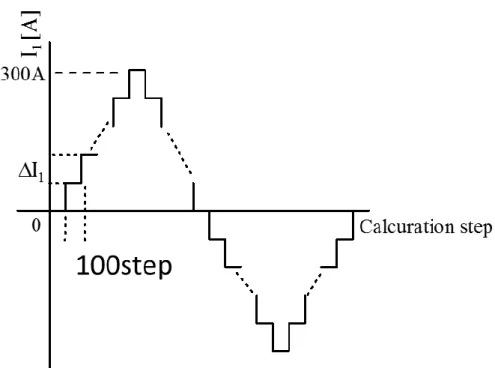
30 続いて被測定電流I1についてだが,通常,ホール式電流センサは被測定電流 I1によって発生したギャップの磁束密度を常に0 になるように I2を流してお り,アンプの応答時間やコイルの時定数などを考慮すべきである。今回,過渡 現象を考慮せずヒステリシスの影響を考慮するために,検出電流I2は1 ステッ プ遅れて応答すると仮定し解析を行っていく。まず,図3.19.のように被測定 電流I1を流す。ΔI1の変化に対しI2を(23)式に従って変化させながら 10step の解析を行いギャップの磁束密度を0 に近づける。これにより実際のホール式 電流センサの原理を模擬して解析を行う。今回,被測定電流I1を0A から 300A に上昇させ,次に-300A まで下降,そして最後に 0A になるようにして ΔI1の値を変えて解析を行った。 図3.19. 被測定電流 I1の流し方 300A
I
1[A
]
Calcuration stepI
1 10step 031
解析結果
ΔI1変化した場合のステップ数に対する被測定電流I1と検出電流NI2の変化 を図3.20.に示す。ただし図では最初の 21step を示している。図より NI2が少 し遅れて応答しI1に近づいていることが分かる。これによりΔI1変化したステ ップでは,検出電流が変化しないので,磁束を打ち消さずコアに磁束密度が生 成され,磁気ヒステリシス特性を見ることができる。 図3.20. I1とNI2の変化I
1NI
2I
1,N
I
2Calcuration step
I
132 また,電流センサにおいて誤差が重要であるので,ΔI1が10A とした場合の 電流誤差I1-NI2を図3.21.に示す。図より被測定電流 I1が300A になるときの 電流誤差を比較すると,I2が収束した時(297step から 301step の平均値)の値 でヒステリシスを考慮しない場合-0.0196A であるのに対してヒステリシスを考 慮した場合-0.0645A となり 3.29 倍となった。また被測定電流 I1が最小の-300A になるときの電流誤差を比較すると,I2が収束した時(897step から 901step の 平均値)の値でヒステリシスを考慮しない場合 0.0196A であるのに対してヒス テリシスを考慮した場合0.0621A となり 3.17 倍となった。ΔI1を 10A とした 場合の電流誤差は約3.23 倍であった。
次にヒステリシスを考慮したときの誤差について検討すると図3.21. (a)より, 1step から 301step の場合,被測定電流 I1を増加させるに従い誤差が大きくな る。また図3.21 (b).より,302step から 901step までの被測定電流 I1を300A か ら-300A まで減少させるとき,減少し始めたとき誤差の変化幅が大きく,電流 を減少させるに従い小さくなる。そして図3.21 (c).より,902step から 1201step までの被測定電流I1を-300A から 0A に上昇させるときも同様に初めは変化幅 が大きいことが分かる。
I
1-N
I
2[
A
]
Calculation step
with hysterisis
without hysterisis
0
500
1000
-0.1
0
0.1
33
図3.21.(a) ΔI1=10A のときの電流誤差
図3.21.(b) 250step から 450step の電流誤差 図3.21.(c) 850step から 1050step の電流誤差
I
1-N
I
2[
A
]
Calculation step
with hysterisis without hysterisis250
300
350
400
450
-0.06
-0.04
-0.02
0
I
1-N
I
2[
A
]
Calculation step
with hysterisis without hysterisis850
900
950
1000
1050
0
0.02
0.04
0.06
34 この原因を検討するために, 902step からの B-H ループ上の変化をΔI1を大 きくした場合について図3.22.に示す。図より,磁束密度はマイナーループ上を 1→2→3→4→5 のように変化する。つまり,901step で 1 の状態のとき,902 ス テップで2 へ移動し,903~911step で 3 に収束する。そして,次のΔI1の変化 のとき912step で 4 に移動し 913~921step で 5 に収束する。以下これを繰り 返していく。従ってギャップ磁束密度がほぼ0 になったときのコアの磁界は 1, 3,5…のように変化する。この磁界の強さは I1-NI2に対応すると考えられるの で,I1-NI2がプラスから変化幅を小さくしながらマイナスへと変化する図3.21. の傾向を定性的に説明できる。 図3.22. マイナーループ上での動き
35 過渡現象を考えずに被測定電流I1をΔI1変化させた次のステップでI2が変化 するとして検討してきた。従って,得られた誤差はΔI1の大きさによって異なる と考えられる。そこで,ΔI1の大きさを変えた場合の誤差を図3.23.に示す。図 より,ΔI1を大きくしていくと電流誤差が大きくなっていくことが分かる。この 原因として,ΔI1の上がり幅が大きいほど磁束密度が大きくなってしまい,磁気 ヒステリシスの影響を強く受けるためである考えられる。また,磁気ヒステリシ スを考慮しない場合の電流誤差はΔI1が変化しても一定で小さいことがわかる。 図3.23. ΔI1の大きさを変えた場合の誤差 300A with hysteresis
+0A with hysteresis -300A with hysteresis -0A with hysteresis
I
1-N
I
2[A
]
I
1[A]
+300A without hysteresis +0A without hysteresis -300A without hysteresis -0A without hysteresis
0
100
200
300
-1
0
1
36
3.1.5 過渡応答を考慮した解析
解析条件
次に過渡応答を考慮し解析を行っていく。過渡応答を考慮するために,JMAG 内での回路を図3.24.のように電流源から電圧源と変更した。そして,ΔI1の変 化に対し I2を(26)式に従って変化させながら 100step の解析を行いギャップの 磁束密度を0 に近づける。電流源の場合と同様に図 3.25.のように,被測定電流 I1を 0A から 300A に上昇させ,次に-300A まで下降,そして最後に 0A にな るようにしてΔI1の値を変えて解析を行った。 電流源の場合はΔI1の変化に対し10step の解析を行ったが,電圧源の場合は 100step の解析を行った。その理由として,過渡応答を考慮した場合 NI2の変化 が減衰振動のようになり,100step で 5 個の極大値,極小値を見ることができ, 計算にして収束値を予想することができたが,10step では 1 周期ほどの変化し か見られず収束値を予想することができなかったためである。 図3.24. 電圧源としたときの回路図 v37
38
解析結果
まず,ΔI1変化した場合のステップ数に対する被測定電流I1と検出電流NI2 の変化を図に示す。ただし図3.26.では最初の 201step を示している。I1の変 化と同時にNI2が変化していることが分かる。この違いとして電圧源を回路に 設定すると,磁束密度の変化に伴い誘導電流がコイルに流れてしまうからであ る。電流源の場合,回路の電流を設定した値にしてしまうので誘導電流が流れ なかったためである考える。また,NI2は減衰振動のように変化する。この原 因としてコイルのインダクタンスによる過渡応答が原因である。 図3.26. 過渡現象を考慮したときの I1とNI2の変化I
1NI
2I
1,N
I
2Calcuration step
39
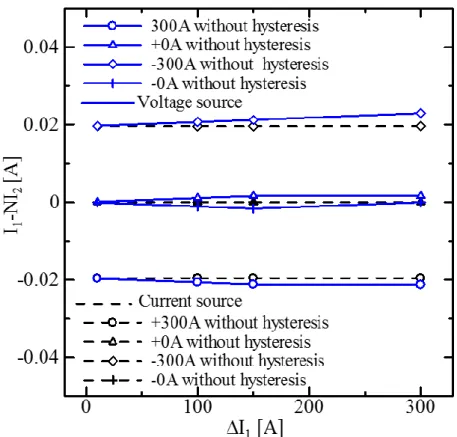
電圧源のΔI1の大きさを変えた場合の誤差を図3.27.に示す。ヒステリシスを 考慮した場合ΔI1を大きくしていくと電流誤差が大きくなる。しかし,徐々に誤 差の変化幅が小さくなり,ΔI1=150A,300A のときの誤差はほぼ一緒であるこ とが分かる。しかし,ΔI1=300A の場合の 300A で収束したときの誤差は他と 比べて大きくなっていることが分かる。この原因として,一度目のΔI1の変化で 300A まで上昇したため,初磁化特性からマイナーループに切り替わった一回目 の場合で収束値を見ているからであると考える。 また,磁気ヒステリシスを考慮しない場合の電流誤差はΔI1を変化させても 一定で小さくなる。 図3.27. ΔI1の大きさを変えた場合の誤差
I
1-N
I
2[A
]
I
1[A]
300A with hysteresis
0A with hysteresis
-300A with hysteresis
-0A with hysteresis
300A without hysteresis
0A without hysteresis
-300A without hysteresis
-0A without hysteresis
0
100
200
300
-0.1
0
0.1
40 次に,過渡応答を考慮したときと考慮してないときを比較していく。 まず図3.28.よりヒステリシスを考慮しない場合,誤差はほとんど変わらない。 しかし過渡応答を考慮した場合のほうが,ΔI1を大きくすると若干誤差が大き くなってしまう。この原因として,減衰振動のような変化をしていることが若干 の誤差を発生してしまう原因だと考えられる。 ヒステリシスを考慮した場合,図3.29.より過渡応答を考慮した場合のほうが 誤差が小さいことがわかる。これの原因として,まず誘導電流が流れていること が電圧源の誤差を小さくする理由のひとつである。ΔI1 の変化と同時に誘導電 流が発生し,その誘導電流によって磁束密度が打ち消され,電流源の場合と比べ て約1/3 の磁束密度しか発生しないからである。もうひとつの理由として,検出 電流I2が減衰振動のように変化しているためである。詳しく説明すると図3.30. より,検出電流 I2が極大値の状態であり,BH ループ上で 1 の場所にいると仮 定する。I2が減少していき極小値になったときBH ループ上で 2 の場所に移る。 次にI2が極大値になるときBH ループ上で 3 になり,次の極小値で 4,次の極 大値で5 となり以下これを繰り返していく。BH ループがΔI1の変化に対して磁 界が徐々に 0 に近づいていく。ΔI1が小さければ 300A になるまでこのような 変化が多くなるため,ΔI1を小さくした場合の誤差は小さくなると考えられる。
41
図3.28. ヒステリシスを考慮しない場合ΔI1の大きさを変えた場合の誤差
図3.29. ヒステリシスを考慮した場合ΔI1の大きさを変えた場合の誤差 300A with hysteresis
+0A with hysteresis -300A with hysteresis -0A with hysteresis
I
1-N
I
2[A
]
I
1[A]
300A with hysteresis 0A with hysteresis -300A witt hysteresis -0A with hysteresis
Current source Voltage source
0
100
200
300
-1
0
1
42 図3.30. マイナーループ上での動き
1
5
4
3
2
B
[
T
]
H [A/m]
0
0
43
3.2 DC/DC コンバータ
3.2.1 動作原理
DC/DC コンバータにもいろいろなタイプの回路があり, 入力電圧を昇圧する 昇圧コンバータ, 逆に入力電圧を降圧する降圧コンバータ, どちらも行うこと のできる昇降圧コンバータなどが代表的である。降圧コンバータを用いて DC/DC コンバータ運転時の特性を明らかにしていく。まず, 降圧コンバータの 原理を説明する。降圧チョッパ回路の動作原理
図3.31. パワーMOS on 時 図3.32. パワーMOS off 時44 図3.33. インダクタ電流, 電圧の時間波形 パワーMOS が on の時, 電流は図 3.31.に示す経路に流れる。インダクタの端 子間電圧は入力電圧 Vinと出力電圧 Voutの差 Vin-Voutとなりインダクタには磁気 エネルギーが蓄積していく。そのため, インダクタ電流 iL は徐々に上昇してい く。パワーMOS が off の時, 電流は図 3.32.に示す経路に流れる。インダクタの 端子間電圧は-Voutとなり蓄積された磁気エネルギーを放出する。そのため, iLは 徐々に減少する。設定したデューティ比D に従って交互に on と off を繰り返す ことによってiLのリプル電流ΔiLが形成される。この時, 入力電圧と出力電圧に は式(27)のような関係がある。そのため, 出力電流は(28)式となる。 Vout=DVin (27) 𝐼𝑜 =𝐷𝑉𝑖𝑛 𝑅𝐿 (28) インダクタの電流 iL の直流バイアス分 Io と三角波と仮定した時のリプル分
ΔiL(peak to peak)の概算値を求めるために, Vin, Voutを一定と仮定し, インダクタ の抵抗成分R とシャント抵抗 RshやMOS-FET やダイオード SBD の電圧降下を 無視して考えるとインダクタの端子間電圧vLは
𝑣𝐿 = 𝑉𝑖𝑛− 𝑉𝑜𝑢𝑡 = 𝐿𝑑𝑖𝐿
𝑑𝑡 (29) となり, 式を変形すると
45 ∆𝑖𝐿 = 𝑉𝑖𝑛− 𝑉𝑜𝑢𝑡 𝐿 ∙ 𝑇𝑜𝑛 (30) 𝐷 =𝑇𝑜𝑛 𝑇 であるので 𝑇𝑜𝑛 = 𝐷𝑇 = 𝐷 𝑓𝑠𝑤 (31) (30), (31)式より ∆𝑖𝐿 = 𝐷(1 − 𝐷)𝑉𝑖𝑛 𝐿𝑓𝑠𝑤 (32) と表すことができる。ただし, vL はインダクタの端子間電圧, L はインダクタン ス, iLはインダクタに流れる電流, ΔiLはiLのリプル分, TonはパワーMOS のオン 時間, T は周期, fswはスイッチング周波数である。パワーMOS が off している時 も(32)式と全く同じ式が導き出せる。よって, インダクタの端子間電圧とインダ クタ電流の時間波形は図3.33.のようになる。 また, (28)式を𝐿𝑑𝑖𝑑𝑡ではなく𝑁𝑆𝑑𝐵𝑑𝑡で計算を行うと ∆𝐵 =𝐷(1 − 𝐷)𝑉𝑖𝑛 𝑓𝑠𝑤𝑁𝑆 (33) と表すことができる。ここで, N は巻数, S はインダクタの磁路断面積である。
46
3.2.2 実測値と近似値
解析モデル
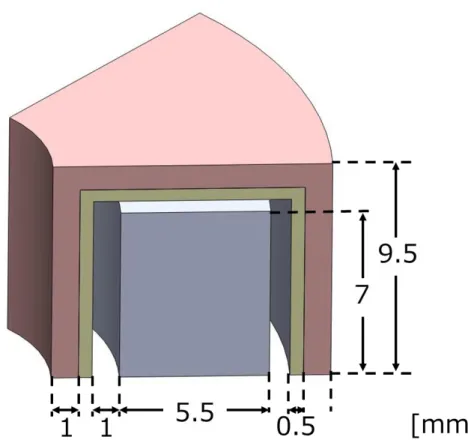
解析するモデルについて,DC/DC コンバータに用いられているインダクタの 試料として市販のインダクタ(タムラ製作所 AHD-08-0125)を用いた。コアの材 質はパーマロイダストを使用しており, 形状はトロイダル型, 巻数は一次側, 二 次側共に40Turn となっている。モデルの寸法は図 3.34.のとおりであり,コア の寸法は磁路長li=64.4mm,磁路断面積S=71.5mm2,内径15mm,外形 26mm, 高さ14mm となっている。 そのタムラコイルの1/16 モデルを SolidWorks で作成し,図 3.35.のような寸 法とした。外側から一次側巻線,二次側巻線,空気領域があり,コアとなってい る。 図3.34. コア寸法 外径 内径 高さS
l
i47
48
磁性材料の測定方法
測定装置構成を図3.36.に示す。発振器からの出力をパワーアンプによって増 幅しインダクタに1kHz の正弦波を印加する。今回周波数が高くなると(34)式よ り,高い電圧が必要になり,危険なため1kHz とした。測定したいコアにシャン ト抵抗を直列に接続し, 二次巻線を施してインダクタ電流と誘起電圧の測定を 行う。実験方法としてパワーアンプの増幅率を変えながらi1とv2の測定オシロ スコープを用いて行っていく。得られたi1とv2を磁界 H と磁束密度 B に変換 し, 横軸に H, 縦軸に B をとることで BH カープを得る。 𝐵𝑚 = 𝑉𝑚 2𝜋𝑓N1𝑆 (34) ここで, Bm, Vmは磁束密度, 印加電圧の波高値で, f は周波数, N1は一次巻線 数, S はコアの磁路断面積である。 図3.36. 磁化特性測定装置構成49
測定結果
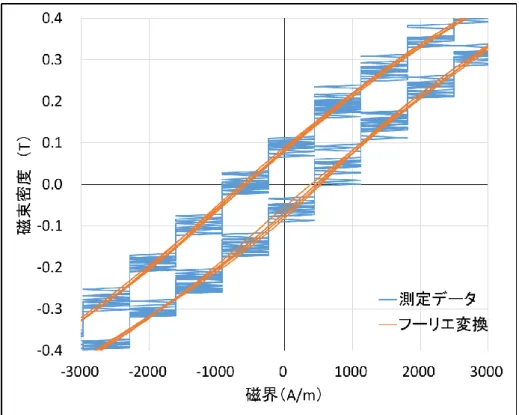
測定したデータが図3.37(a)の水色のグラフである。オシロスコープで測定し v2 の波形の精度があまり良くなかったので,測定データをフーリエ変換し 20000Hz 以上の周波数成分を取り除き,逆フーリエ変換を行った結果がオレン ジ色のグラフである。拡大したグラフを図 3.37(b) 図 3.37(c)に示す。これより 飽和磁束密度Bmax=1.3T,残留磁束密度 Br=0.08T,保磁力 Hc=500A/m の 3 つ のパラメータを決定した。この材料特性を使う用途によって変更するが,基本の パラメータとし解析を行っていく。 図3.37(a). 測定結果と高周波成分を除いた結果50
図3.37(b). 測定結果と高周波成分を除いた結果
51
解析材料の決定
今回の解析では,弱い磁界のときの BH ループの傾きが重要となってくるの で,傾きを調節するために図3.38.のように保磁力 Hcは実測値のまま500H/m, 残留磁束密度は0.08T から 0.07T と変更して,飽和磁束密度を 1.3T から 0.8T としてヒステリシスを設定し実測値のループと同じ磁化特性になるか確認する。 振幅が8A の正弦波を流したときの BH ループと一致するか確認する。 図3.38. 測定値とシグモイド関数での近似52 そして,測定結果とJMAG での解析結果を比較したグラフを図に示す。 測定条件としては振幅8A の正弦波をコアに巻かれたコイルに流した。流した 電流に対するコアに発生した磁束密度をグラフにした。解析も同じ条件になる ように設定し,3/4 周期分の解析を行った。 そして,測定結果とJMAG での解析結果を比較したグラフを図 3.39.に示す。 赤い線がJMAG で解析を行ったグラフである。始めの上昇は初磁化特性である。 下降部分を見てみると,下がり始めはずれているが途中から磁束密度が 0 付近 になるまで測定値とほぼ同じになることが分かる。しかし,0 を過ぎた付近から 測定値のループとは離れてしまった。しかし他の値も変更し解析を行ったが最 も測定値に近づいたのが Hc=500H/m,Br=0.07T,Bmax=0.8T の値だったの で今回この3 つの値で解析を行っていく。 図3.39. 測定値と解析値の比較
53
3.2.3DC/DC コンバータへの適用
本論文での測定法方はインダクタに二次巻線を施し,DC/DC コンバータを運 転させて入力電圧,入力電流,二次側電圧をオシロスコープで測定する。 図 3.40.に簡易測定法の原理図示す。オシロスコープを用い, 図中点線矢印で 示される箇所の波形の測定を行う。具体的にはインダクタに直列にシャント抵 抗Rshを設けることによって, インダクタの一次側電流の測定を行う。今回用い たシャント抵抗の値は 0.1Ωであるため, 測定した電圧値を 10 倍することでイ ンダクタに流れる電流値に換算できる。また, インダクタに二次巻線を施すこと によって誘起される電圧の測定を行う。v1はインダクタの端子間電圧, v2は二次 巻線に誘起される電圧, viはシャント抵抗Rshの端子間電圧である。 図3.40. インダクタの測定方法54 v1より直流成分V1, dcを引いた値を用いてヒステリシスループについて,イン ダクタの鎖交磁束に相当する(v1-V1, dc)の積分値, v2の積分値と i1により描いて Φ-i カーブを示すことができる。この時, 磁束を表す式は(35), (36)式となり, 磁 束密度の計算式 (37), (38)式より(v1-V1, dc)の積分値, v2の積分値つまり一次側鎖 交磁束と二次側鎖交磁束は磁束密度として見なせることが分かる。また, 一次側 電流はアンペールの式(39)式より磁界に相当することが分かり, Φ-i カーブは BH カーブとして見なすことができる。 𝜙1 = ∆𝑡 𝑁1∑(𝑣1,𝑗− 𝑉1,𝑑𝑐) 𝑗 (35) 𝜙2 = ∆𝑡 𝑁2∑ 𝑣2,𝑗 (36) 𝑗 𝜙 = 𝐵𝑆 であるので 𝐵1 = ∆𝑡 𝑁1𝑆∑(𝑣1,𝑗− 𝑉1,𝑑𝑐) (37) 𝑗 𝐵2 = ∆𝑡 𝑁2𝑆∑ 𝑣2,𝑗 (38) 𝑗 𝐻 =𝑁1𝑖1 𝑙𝑖 (39) ただし, 𝜙は磁束, B は磁束密度, H は磁界, liはコアの磁路長である。前述した 通りこのループの面積がインダクタの鉄損となる。ただし, 今回のような直流バ イアス電流が重畳する場合は図3.41.に示すようにメジャーループの初磁化特性 上の動作点でループを作るマイナーループとなっていることに注意して欲しい。 図3.41. メジャーループとマイナーループ
55
DC/DC 用ヒステリシス近似
今回のようなDC/DC コンバータでの直流バイアス電流が重畳する場合,初磁 化特性上の動作点におけるマイナーループが重要になってくる。しかし,2 章で 説明したヒステリシスの近似方法では,インバータ駆動の場合(正弦波+高調波) 図3.42.のように初磁化特性上でのループを描けず,またヒステリシスループの 内側に入ってしまう。これを解決するために,プログラムを変更した。 図3.42. インバータ駆動時の動作56 図3.43.のように初磁化特性上からマイナーループに下降し,上昇するときは 直線でマイナーループとなるように,初磁化特性上に戻るようにプログラムを 変更した。これにより直流バイアス電流が重畳する場合のヒステリシスループ での動作を表すことが可能になった。 図3.44.で磁気特性上の磁化状態の動きを説明する。初磁化特性上に磁化状態 があるとき,上昇中であればkind=1,という情報を各要素の磁化状態 x,y,z の3 成分に持たせておく。1 つ前のステップでの状態が P0点にあるとき磁束密 度がそのまま上昇していけばkindnはkindn-1と変わらず1 のままで上昇中の初 磁化特性でありP1の方向へ上昇する,しかしP0上で磁束密度が下降したとき, kindn =4 となりヒステリシスのマイナーループ上に乗り P2 方向へ下降してい く。ここまでは,前の動作と同じである。今回はループが切り替わったときにそ のときの磁界H0と磁束密度B0を保存する。次にマイナーループ上のP4にある とき,そのまま下降していけばP5方向へと下降していく,しかし磁束密度が上 昇したときはkindn=14 となり P7方向へと上昇し,下降するマイナーループか ら初磁化特性まで上昇するマイナーループへと磁化特性を変更する。このとき 磁界H1と磁束密度B1を保存する。そして,(H0,B0)点まで上昇する。 そして,このとき図3.43.のマイナーループ 14 で用いる式は次の通りである 𝑀14= 𝐵 − 𝜇0{ 𝐵 − 𝐵0 𝐾 − 𝐻0} (40) 𝐾 = 𝐵0− 𝐵1 𝐻0− 𝐻1 = 𝜕𝐵 𝜕𝐻 (41) 𝜕𝑀14 𝜕𝐵 = 1 − 𝜇0 1 𝐾 (42)
57 図3.43. 初磁化特性上のマイナーループ 図3.44. ループ上の動作
H [A/m]
B
[
T
]
P
05
4
1
P
1P
4P
2P
5P
714
(H
0,B
0)
(H
1,B
1)
58
測定値と解析結果の比較
測定したi1, v1,の Vin=30V, I1=6A 時の時間波形と,先ほど説明したヒステリシ ス近似方法を使い解析した結果を図3.45.に示す。測定結果は,降圧チョッパ回 路の原理で説明したような矩形波になっている。インダクタの端子間電圧は矩 形波であるので,インダクタ電流はほぼ三角波の電流となる。そこに直流バイア ス電流が重畳した波形となっている。解析条件は,先ほど説明した近似方法をコ アに用い,0s 時に Vin=30V, I1=6A の場合とほぼ同じ条件で解析を開始するため 電流i1を5A に上昇させた状態から,振幅 15V,スイッチング周波数 20kHz,デ ューディー比 0.5 の電圧をインダクタの両端にかけ,インダクタ電流の変化を 見た。そして解析結果はインダクタの端子間電流はほぼ三角波の電流となった。 比較すると,インダクタ電流の上昇率は少し少ないが同じような三角波電流 になった。これによりDC/DC コンバータにも適用させることができた。 図3.45.電流電圧波形の実測値と解析値59 次に,測定したi1, v1,の Vin=30V, I1=6A の時のヒステリシスループについての 測定値と解析結果を比較する。 図3.46.は先ほどの解析結果の電流i1に対するコアの磁束密度を表したグラフ である。初磁化特性上からマイナーループ上を通り,再び初磁化特性に戻ってい ることが分かる。 図 3.47.は測定値と JMAG での解析結果を比較したものである。測定結果は Φ-i カーブの上下端でスイッチング時のリンギングノイズがのってしまってい るが, 全体の面積と比較すると大きくないため損失の計算では無視して考える。 解析結果は図3.46 のマイナーループ一周期分のループである。比較するとグラ フの傾きはほぼ一致した。ループの面積についてだが解析の場合は実測値と比 べ少し狭いものとなってしまった。しかしプログラム上,マイナーループで上昇 中の磁化特性は直線になってしまうことを考えると,解析結果のループの面積 は小さくなるため,損失もほぼ同じになると考えられる。よってこの解析結果は 妥当だと考える。 図3.46. 初磁化特性からのマイナーループ
i
1(A)
M
a
g
n
e
ti
c
f
lu
x
d
e
n
si
ty
(
T
)
0
2
4
6
0.2
0.4
60 図3.47. Φ-i カーブの実測値と解析値
i
1(A)
t
(v
1-V
1 ,d c)
,
t
V
Calculated by i1 and (v1-V1,dc) JMAG Vin=30V, Io=6A4
5
6
7
8
-0.0002
-0.0001
0
0.0001
0.0002
61
4. 結論
4.1 まとめ
本論文では,磁気ヒステリシスと外部回路を同時に考慮した解析手法の提案 をした。また,その解析手法を電流センサやDC/DC コンバータに適用し,ヒス テリシスが与える影響や誤差について検討を行った。 その結果,磁気ヒステリシスを飽和磁束密度,残留磁束密度,保磁力を用いて シグモイド関数で近似し,電流センサに適用した解析では被測定電流をわずか ずつステップ状に変化させるという条件において,ヒステリシスだけを考慮す る場合の誤差は考慮しない場合の 3.23 倍とかなり大きくなることがわかった。 また,コイルの過渡応答を考慮した場合の誤差は考慮しない場合より小さくな った。この原因として,誘導電流が流れて磁束を打ち消すことと,検出電流が減 衰振動のように変化することが,磁気ヒステリシスの影響を軽減したと考えら れる。 また DC/DC コンバータに適用するために磁気ヒステリシスを実際の材料特 性の測定値で近似し,解析を行った結果,実際に測定した値と解析結果はほぼ一 致した。よってDC/DC コンバータにおいても提案した解析手法は有効であると 考えられる。62
4.2 今後の課題
・電流センサを実際に作成し,実験や測定を行い解析結果と比較していく。 ・DC/DC コンバータにおいて測定結果と同じようなマイナーループを描くた めに,プログラムを改良していく。 ・提案した解析手法を電流センサやDC/DC コンバータ以外にも適用できるか 検討していく。63
謝辞
本研究を進めるにあたり, 終始熱意あるご指導とアドバイスを賜りました石 川赴夫教授, また多くのご助言とご協力を頂きました栗田伸幸准教授に心から 感謝とお礼を申し上げます。 また主査と副査としてご協力いただきました橋本誠司教授,高橋俊樹准教授 に深く感謝致します。 最後に, 日々の研究において様々な協力と激励をいただき苦楽を共にした石 川研究室の学生の皆様に深く感謝致します。64
参考文献
[1] 忠津考,笹田一郎,ビラリ効果を利用した大電流センサ, 電気学会研究会資料, MAG, マグネティックス研究会 2005, pp57-62, 2005 [2] 忠津考,笹田一郎,磁性流体磁気ブリッジを用いた電流センサの開発, 九 州大学大学院総合理工学報告, 第 31 巻, 第 4 号, 1-7 項, 2010.[3] Jeff pankau,David legate, David W.Schlegel,Russel J.Kerkman,Gary L.Skibiniski, High-Frequency Modeling of Current Sensors,IEEE pril April, pril. 50, Npril. 2, Mpril/April 2014,
[4] I.D.Mayerrgoyz, Matheintical models of hysteresis 1991, springer Verks. [5] DC.Jiles, MK.Derine, Nuinrnicel Hetermition of hysteresis parameters for the modeling of magnets prepertises using the theory of ferromagnetic hysteresis, IEEE Times on Magnetics, vol.28, No.1, pp27-35,1992.
[6] JMAG-Designer User’s Manual
[7] 「デバイス材料から機器設計までに貢献する磁性シミュレーション」 <http://www.hitachihyoron.com/jp/pdf/2008/11/2008_11_04.pdf>
65
本論文に関する発表論文
(1)田中恵悟,石川赴夫,栗田伸幸,有限要素法を用いた非接触直流電流セン サの解析,電気学会研究発表資料,ETG-15-10,2016. (2)田中恵悟,石川赴夫,栗田信幸,有限要素法におけるヒステリシスの一考 慮法の提案と電流センサへの適用,第27 回 MAGDA コンファレンス in 桐 生, OS-01-3,2016. (3)田中恵悟,石川赴夫,栗田伸幸,電流センサにおける磁気ヒステリシスの 有限要素法による検討,電気学会研究発表資料,ETG-17-39,201766
付録
magusr
#include "usrsub.h"
CALLTYPE c_magusr(int icond, // IN: icond : =1 : Making Matrix =2 : Post Process
int istep, // IN: step
double time, // IN: time[sec] or frequency[Hz] int nowelm, // IN: element id
int iflgm, // IN: material type (<0)
const double cod[3], // IN: center point position [ m ] on local coordinate system
// if local c.s. is not used, then it is the point on global coordinate system double tempr, // IN: temperature [degree] of this element
const complex bvec[3], // IN: magnetic flux density Bnow [T] double bfac, // IN: revise constant for bvec
const double bveco[3], // IN: magnetic flux density of pre step Bold [T] const double amv[3], // IN: Magnetization Vector(from Permanent Magnet Data) M0 [A/m]
int numel, // IN: total number of elements int numnp, // IN: total number of nodes
int maxnod, // IN: maximum number of nodes within an element
// 2D analysis = 4, 3D analysis = 8 const int ietyp[], // IN: element type
const int lm[], // IN: node ID within an element const double coord[][3], // IN: coordinate of all nodes [ m ]
complex amu[3], // OUT: magnetization vector M(B) [A/m] double dmdbu[3][3], // OUT: derivative coefficient
int iusprm, // IN: user defined array size double usprm[]) // IN & OUT: user defined array {
int i, j, n;
double kind, kind_old;
double b_max, b_r, h_hys, alpha, h_max;
67 double eps;
b_max = 0.8; b_r = 0.07; h_hys = 500; h_max = h_hys*10;←3 つのパラメータ を入力
eps = 1.e-15;
alpha = -1.0 / h_hys*log(2 / (1 + b_r / b_max) - 1); double pmu0 = 4.0 * M_PI * 1.0e-7;
n = nowelm * 9; for (i = 0; i<3; i++){
b_old = bveco[i]; b = bvec[i].real();
kind_old = usprm[n + i]; h_old = usprm[n + 3 + i]; fac_old = usprm[n + 6 + i];
if (abs(b - b_old)>eps && b<b_max && b>-b_max){ //if(kind_old==0){ if (abs(kind_old - 0) < eps){ if (b > b_old) kind = 1; if (b < b_old) kind = -1; } //if(kind_old==1){ if (abs(kind_old - 1) < eps){ if (b > b_old) kind = 1; if (b < b_old) kind = 3; } //if(kind_old==-1){ if (abs(kind_old + 1) < eps){ if (b > b_old) kind = 4; if (b < b_old) kind = -1; } //if(kind_old==3){ if (abs(kind_old - 3) < eps){ if (b > b_old) kind = 4; if (b < b_old) kind = 3; }
68
if (abs(kind_old - 4) < eps){ if (b > b_old) kind = 4; if (b < b_old) kind = 3; }
if (abs(kind - 0) < eps || abs(kind + 1) < eps || abs(kind - 1) < eps){
fac = 1;
h = -1 / alpha*log(1 / ((b / (2 * b_max)) / fac + 0.5) - 1); dhdb = (1 + exp(-alpha*(h)))*(1 + exp(-alpha*(h)))
/ (2 * b_max*fac*alpha*exp(-alpha*(h))); dhdb_check = (h - h_old) / (b - b_old);
}
if (abs(kind - 3) < eps){
if (abs(kind - kind_old) < eps){ fac = fac_old; }
else{
fac = (b_old / (2 * b_max) + 0.5) / (1 / (1 + exp(-alpha*(h_old + h_hys))) - 0.5 + 0.5);
}
if (fac > 1) fac = 1;
h = -1 / alpha*log(1 / ((b / (2 * b_max) + 0.5) / fac + 0.5 - 0.5) - 1) - h_hys;
dhdb = (1 + alpha*(h + h_hys)))*(1 + exp(-alpha*(h + h_hys)))
/ (2 * b_max*fac*alpha*exp(-alpha*(h + h_hys)));
dhdb_check = (h - h_old) / (b - b_old); }
//if(kind==4){
if (abs(kind - 4) < eps){
if (abs(kind - kind_old) < eps){ fac = fac_old;
69 else{ = (b_old / (2 * b_max) - 0.5) / (1 / (1 + exp(-alpha*(h_old - h_hys))) - 0.5 - 0.5); } if (fac > 1) fac = 1;
h = -1 / alpha*log(1 / ((b / (2 * b_max) - 0.5) / fac + 0.5 + 0.5) - 1) + h_hys;
dhdb = (1 + alpha*(h - h_hys)))*(1 + exp(-alpha*(h - h_hys)))
/ (2 * b_max*fac*alpha*exp(-alpha*(h - h_hys)));
dhdb_check = (h - h_old) / (b - b_old); }
kind_old=kind; b_old=b; h_old=h; fac_old=fac; if (icond == 2){
usprm[n + i] = kind; usprm[n + 3 + i] = h; usprm[n + 6 + i] = fac; }
amu[i] = bvec[i] / pmu0 - complex(h, 0); dmdbu[i][i] = 1 / pmu0 - dhdb;
} if (b > b_max){ if (icond == 2){
usprm[n + i] = 1;
usprm[n + 3 + i] = h_max + (b - b_max) / pmu0; usprm[n + 6 + i] = 1.0;
}
amu[i] = b_max / pmu0 - complex(h_max, 0); dmdbu[i][i] = 0.0;
}
if (b < -b_max){
if (icond == 2){
usprm[n + i] = -1;
usprm[n + 3 + i] = -h_max + (b_max + b) / pmu0; usprm[n + 6 + i] = 1.0;
70 }
amu[i] = -b_max / pmu0 + complex(h_max, 0); dmdbu[i][i] = 0.0;
} }
71
usrisrc
#include "usrsub.h" #include <complex>
CALLTYPE c_usrisrc(const int idfnc, // IN: ID of current function const int iuscur, // IN: ID of users' subroutine (-1,-2,...)
const int istep, // IN: step
const double time, // IN: time[sec] or frequency[Hz] const double timef, // IN: time[sec] for FQ-HT const int iusprm, // IN: user defined array size
double usprm[], // IN & OUT: user defined array // OUT
complex *vval) // OUT: current [A] { int id; int check; double curr[2]; double mf[3]; ; id = 43152; //ギャップあり←要素番号を入力 if (istep == 1){ mf[0] = 0.0; mf[1] = 0.0; mf[2] = 0.0; *vval = std::complex<double>(0.0, 0.0); } else{
int numnp = get_element_count();
int handle = get_component("magnetic_flux_density"); check = get_component_value(handle, id, mf);
if (check == 0){
printf("%s¥n", "node not found in usrvsrc."); fflush(stdout);
}
72 // Set current [A].
if (mf[2]>0){
curr[0] = (usprm[0] - ((mf[2] / 6.18E-004) / 1000)); }
else if (mf[2] <= 0){
curr[0] = (usprm[0] + ((-mf[2] / 6.18E-004) / 1000)); }
*vval = std::complex<double>(curr[0], 0.0); usprm[0] = curr[0];
} }
73
usrvsrc
CALLTYPE c_usrisrc(const int idfnc, // IN: ID of current function const int iuscur, // IN: ID of users' subroutine (-1,-2,...)
const int istep, // IN: step
const double time, // IN: time[sec] or frequency[Hz] const double timef, // IN: time[sec] for FQ-HT const int iusprm, // IN: user defined array size
double usprm[], // IN & OUT: user defined array // OUT
complex *vval) // voltage [V]{ int id; int check; double curr[2]; double mf[3]; id = 43152; //ギャップあり←要素番号を入力 if (istep == 1){ mf[0] = 0.0; mf[1] = 0.0; mf[2] = 0.0; *vval = std::complex<double>(0.0, 0.0); } else{
int numnp = get_element_count();
int handle = get_component("magnetic_flux_density"); check = get_component_value(handle, id, mf);
if (check == 0){
printf("%s¥n", "node not found in usrvsrc."); fflush(stdout);
}
// Set current [A]. if (mf[2]>0){
74 }
else if (mf[2] <= 0){
curr[0] = (usprm[0] + (10 * (-mf[2] / 6.18E-004) / 1000)); } *vval = std::complex<double>(curr[0], 0.0); //*vval = mf[2]; usprm[0] = curr[0]; } }