立体フィルタを用いたConvolutional Neural Network による三次元物体認識
2
0
0
全文
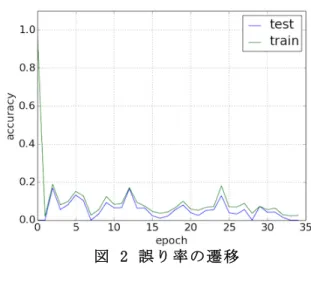
(2) 情報処理学会第 78 回全国大会. 表 1 三 次 元 CNN の 構 成 layer input conv pool fc fc fc. 𝐻×𝐻×𝐻. 5×5×5 4×4×4 -. 𝑠 3 4 -. output 100×100×100×1 32×32×32×16 8×8×8×16 1×1×1×512 1×1×1×256 1×1×1×5. 𝑓(𝑥) ReLU[4]. ReLU ReLU softmax. 図 2 誤 り 率 の 遷 移 . 図 1 三 次 元 形 状 の ボ ク セ ル 変 換 例 タのボクセル(𝑖, 𝑗, 𝑘)(1 ≤ 𝑘 ≤ 𝑊 − 1)のチャ ネル𝑐の値を𝑥!"#! ,チャネル𝑐のボクセル値に対す る𝑚番目のフィルタ中の画素(𝑝, 𝑞, 𝑟)(1 ≤ 𝑟 ≤ 𝐻 − 1)の値をℎ!"#$% とすると,三次元 CNN の 畳み込み演算は以下の式で表される.. !!! !!! !!! !!!. 𝑢!"#$ =. 𝑥!"!!,!"!!,!"!!,! ℎ!"#$% . (2). !!! !!! !!! !!!. また本手法におけるプーリング層では最大プ ーリングが行われ,ボクセル(𝑖, 𝑗, 𝑘)を中心と したサイズ𝐻×𝐻×𝐻の領域中の最大値を返す.畳 み込み層で三次元空間上の形状パターンに対す るフィルタの反応が出力され,プーリング層で 平行方向の反応のずれが吸収される.本手法で はこの畳み込み層とプーリング層によって抽出 された特徴量を全結合の層に入力する.. 4 実験. 5. 実験結果. 訓練データ及びテストデータの誤り率の遷移 をエポックごとにプロットしたグラフを図 2 に 示す.エポックごとに精度の振動が見られるが, いずれも誤り率は概ね 20%以下に収まっている ことがわかる.. 6 まとめ 本論文では,高精度な三次元物体認識を行う ため,従来手法である CNN を三次元に拡張する 手法を提案した.三次元 CNN ではボクセル値の ない部分への畳み込みも行うため,今後はその ような無駄のないニューラルネットを構築する 必要があると考える. 参考文献. [1] Y. Lecun, L. Bottou, Y. Bengio and P. Haffner, “Gradient-based learning applied to document recognition,” In Proceedings of the IEEE, 86, pp.2278-2324, 1998. [2] R. Socher, B. Huval, B. Bhat, C. D. Manning and A. Y. Ng, “Convolutional-Recursive Deep Learning for 3D Object Classification,” 本手法の認識精度を検証するため,三次元物 In Advances in Neural Information Process体認識の評価に用いられる三次元形状データセ ing Systems 25, 2012. ット Princeton Shape Benchmark(PSB)[3]デ [3] P. Shilane, P. Min, M. Kazhdan and T. Funータセットを用いた実験を行った.今回の実験 khouser, "The Princeton Shape Benchmark, では 5 クラスのいずれかに属する訓練データ, " Proc. Int'l Conf. On Shape Modeling and テストデータを共に 102 個用意し,各形状デー Applications 2004(SMI '04), pp.167-178, 20タをモデルの重心の𝑧軸まわりに 45 度まで 5 度 04. ずつ回転させ,918 個とした.各形状データは図 [4] Glorot, Xavier, A. Bordes, and Y. Bengio, 1 に示すような分割数100×100×100のボクセル "Deep sparse rectifier neural networks,” Inへの変換がなされ,三次元 CNN に入力される. ternational Conference on Artificial Intellig本手法で用いる三次元 CNN の構成を表 1 に示す. ence and Statistics, pp.315-323, 2011.. 2-38. Copyright 2016 Information Processing Society of Japan. All Rights Reserved..
(3)
図
関連したドキュメント
次に,同法制定の背景には指導者たちにどのよ
重要な変調周波数バンド のみ通過させ認識性能を向 上させる方法として RASTA が知られている. RASTA では IIR フィルタを用いて約 1 〜 12 Hz
振動流中および一様 流中に没水 した小口径の直立 円柱周辺の3次 元流体場 に関する数値解析 を行った.円 柱高 さの違いに よる流況および底面せん断力
テストが成功しなかった場合、ダイアログボックスが表示され、 Alienware Command Center の推奨設定を確認するように求め
LLVM から Haskell への変換は、各 LLVM 命令をそれと 同等な処理を行う Haskell のプログラムに変換することに より、実現される。
先に述べたように、このような実体の概念の 捉え方、および物体の持つ第一次性質、第二次
• 競願により選定された新免 許人 は、プラチナバンドを有効 活用 することで、低廉な料 金の 実現等国 民へ の利益還元 を行 うことが
Q7
