模擬実験と回帰診断
高 橋 武 則 * 楊 国 林 料
S i m u l a t i v e E x p e r i m e n t and R e g r e s s i o n D i a g n o s t i c s
T a k e n o r i T a k a h a s h i a n d K o u l i n Y oh
要 旨 コンビュータの発展のめざましい現在,統計教育においてパーソナルコンビュータの利用は 当たり前のこととなりつつある。そして,このことによりかつてはごく一部の人のものと言われていた 高度な解析が,多くの人に可能になってきた。中でも重回帰分析の利用の機会は飛躍的に増えている。
しかしながら,とりあえず手持ちのデータをコンビュータで処理して,そのまま結論とするケースが少 なくない。このため,得られた結論に信頼のおけないものや妥当で、ないものがしばしば登場する。本研 究では,模擬実験を用いて回帰診断を行い,重回帰分析のスムーズな導入と,回帰診断を体験学習する ことにより,重回帰分析の使いこなし方を確実に身につけるアプローチを提案し,実施した実例を紹介 する。
1 . は じ め に
重回帰分析は高度な統計手法のうちで最もよ く用いられる一つである。しかしながら,意味 のある重回帰式を得るためには回帰診断は不可 欠である。近年回帰診断の可能なソフトが多く 提供されているが,回帰診断を実際に行ってい る人の数は決して多くはない。本研究は教室内 で手軽に出来る模擬実験を用いて回帰診断を体 験学習方式で学ぶアプローチを提案し,合わせ て実施事例を紹介する。回帰診断は単なる分析 に終わらせてはならない。診断の過程で、明らか になった外れ値についてはその原因を解析し,
再発防止のための対策が必要で、ある。また,外 れ値であることが分かった場合には,そのデー タをキャンセルする。しかし,そのままではデ ータ数が減り,あるいはバランスのとれた実験 では欠測値となる。したがって,データを取り 直す必要がある。その際安易な取り直しは慎む べきで,ここでは実践的で合理的な診断とデー
*非常勤講師数理統計学
**本学助教授生体情報工学
( 4 7 )
タの取り直しのためのアプローチを提案し,具 体例を紹介する。
模擬体験(実技演習)により統計のもつ意味 とその有効性を実感した学生は,統計のさらに 深い理解と高度な応用のために統計理論の学習 へと進むのがよし、。有効性を実感した経験を有 する学生の勉学意欲はきわめて高し、。
2 .
体 験 学 習 方 式 の 重 回 帰 分 析 教 育2 . 1
基本方針多くの人にとって自然に学ぶことが出来かっ 実践力が養われる教育方式として,体験学習方 式がある。できれば本物を体験することが望ま
しいが,多くの場合それは費用と手間の点で困 難である。仮に可能で、あったとしても,本物に よる体験を通しての教育は,受講生の側にとっ てはしばしば苦痛になる。時聞が掛かるのと,
固有技術を理解しなければならないからであ る。このとき,模擬実験を用いて教育を実施す ることは大いに有効な方法である。
このような教育方式を設計するにあたり,そ の基本方針は以下の通りである。
( 1 ) GLM ( G r a d u a t e d L e v e l M e t h o d )
とする。すなわち,前の実験はそれ自体が目的であ ると同時に後の実験の準備になるように設計す る。ただし,スキップが可能な場合にはスキッ プすることもある。
( 2 )
必ず回帰診断を行い,外れ値の原因を追 求し,再発防止をはかる。( 3 ) micro‑CDA
を基本ソフトとする。( 4 )
計算および作図は原則としてコンビュー タで処理し人手では行わない。本書では計算や作図はコンピュータで行うこ とを前提に構成している。このため東京理科大 学芳賀敏郎教授の開発された
I micro‑CDAJ
というプログラムを使用する。このプログラム はたいへん優れたプログラムであり,かつソー スプログラム(言語は
BASIC)
が公開されて いる。2 . 2
模提実験本研究では模擬実験モデルとして「紙へリコ
②
プター降下
J
(以後,降下のことを飛行と呼ぶ) を用いて,重回帰分析の実践的回帰診断のアプ ローチを展開する。このアプローチは他の模擬 実験モデ、ルで、も行うことができる。著者の開発 したオリジナルモデルには「コイン滑走」と「紙 グライダー飛行」がある。しかし今回の報告 では重回帰分析の実践的回帰診断のアプローチ そのものに焦点を合わせるので,初心者にとっ て実施の容易な紙ヘリコプターを用いる。な お,紙ヘリコプターそのものは著者のオリジナ ルで、はないが,これを用いてのカリキュラムの 構成と演習の進め方については著者が独自に創 案し設計している。2
圃2 . 1 6
つの説明変数本研究では,質的変数も含む多数の説明変数 がある場合の重回帰分析を扱うために,以下に 示す6つの条件を取り上げる。各々の条件は図
2 . 1
に示している。④
E E
‑
‑
‑ ‑
‑ ‑
‑ ‑ ‑ 田
‑ ‑
‑ ‑
LーらlTLI
E目 ‑
‑
‑
‑ E m
‑ ‑
‑ ‑
E目 ‑
‑
L1h1﹁
L t
‑ ‑
‑ ‑
‑ 目
‑ ‑
Ea‑‑
‑ ‑
‑ ‑
‑ 句
‑ ‑
E h
‑
‑ E
﹃ E
‑ ‑
E E‑ ‑
m
‑
‑
E目
‑ ‑
J E
4︐ ﹃
E
J︐
E E
‑
‑
‑ 目
E E
‑ ‑
‑ ‑
E E
‑
‑
t‑t+BT4E
EE
‑‑
‑ ‑
‑ ‑
E E E E
‑ ‑
‑ ‑
! 日;;jj;;;jjjjJjji三日|二l~~
‑ E 目 E
E ‑
‑ ‑
‑
‑ B E
E ‑
‑ ‑
lrLI‑TIT
‑
‑ E E
‑ ‑
‑ ‑
‑ ‑ E ‑
E E 同
‑
1F﹂﹄﹄﹁
1 ‑ ‑
‑
‑ ‑ 目 ‑
E E 田
‑ E E M E
‑ ‑ ‑
‑ ‑ 一
E
E ‑
‑ ‑
E E 同
‑ ‑
‑ E‑ ‑
E m
‑
‑ ‑
‑ ‑
︐ ﹃ 目 ﹂
Ed1E1
‑ E m
‑
‑‑ 田‑
‑ E E
‑
‑ ‑
‑ ‑
'TAB‑τIT
‑E E‑
‑ ‑
‑ ‑
E E E E
E ‑
‑ ‑
②:翼の長さ ③:翼の幅 ④:足の長さ ⑤・足の幅
:この部分は切ってはならない この部分に機体番号を記入する 図
2 . 1
機 体 の 各 部 位 の 名 称 と サ イ ズ の 定 義図
2 . 2 翼の幅が狭い場合
図
2 . 3 翼の幅が広い場合
( 4 8 )
班の番号
3
班実験の番号 2回目
機体の番号
5
号機 図2 . 4
機 体 へ の 番 号 の 記 入 例① 紙質
② 翼 の 長 さ
① 翼の幅
④ 足 の 長 さ
⑤ 足 の 幅
⑥ 重 さ
この実験では,機体の条件が複雑になるので,
以下のようにして機体を準備する。
(1) 機体番号を書く。
( 2 )
用紙の上の条件欄にそれぞれの条件を記 入する。( 3 )
条件に合わせてマーカー(ラインマーカ ー)で切るべき線を書く。( 4 )
条件とマーカーが合っているかどうか別 の人がチェッグする。(5) 1枚に3機あるので,各々の機体ごとに 分離する。(多人数で作業ができる。)
( 6 )
マーカーの線に合わせて切る。2 . 2 . 2
実験上の注意(1) 1回の飛行を 3台のストップウオッチで 計測しメジアンを採用する。
(2) 1機につき 3回飛行させて,メジアン (メジアンのメジアン)を採用する。
( 3 )
飛行の順番は必ずランダムにする。その 方法として,紙を小さく切って番号を書いてくじを作り,よく混ぜ、てから抜いて順番を決め る。
( 4 )
重回帰の解析が終了するまでは,実験に 用いたすべての機体をそのままの状態で保存し ておく。このことにより,解析の途中で外れ値 や,おかしなことが見いだされた場合に,その 原因を現物に基づいて探ることができる。( 5 )
実験条件に不審な点があれば,条件が合 っているかどうかを実物で確認する。( 6 )
飛行あるいは計測に不審な点があれば,再度飛行させて検討すあ。
(7) 検証のための実験にあたっては,対象の 実物機の複製機を作成し,これを利用すること により,実物機はできる限りその状態を保存す る。
3 .
教育カリキュラム本章では教育全体の構造について述べる。こ の教育のゴールは説明変数が
6
個の重回帰分析 である。そこへスムースに到達するために段階 的なカリキュラムを用意している。しかし,実 施にあたっては大きく三つのタイプで実施することヵ:で、きる。
(1) すべてのカリキュラムを実施する。
( 2 )
いくつかのカリキュラムをスキップす る。(3) 必要最小限のもので実施する。
本章ではカリキュラム全体の概要を紹介し,
4
章と
5
章においては重要な実験について紹介す る。なお, "、くつかのカリキュラムの中では時 間短縮法を紹介しているが,できればこれを用 いずに正式にデータを取った方がよい。3 . 1
実験誤差の管理:全ての基礎実験誤差を管理することは最も重要な基礎で ある。この実験における誤差は大きく
3
種類の 誤差(製作誤差,飛行誤差,計測誤差)に分類 できる。これらのばらつきを分解し,中でも大 きいものを低減することによって最終的に実験 誤差を十分に小さなものにしてから実験を始め なければならなし、。誤差のばらつきが大きいと 以後の実験においてしばしば次のような問題が 発生する。( 1 )
異常な機体を検出することができない。( 2 )
本来有意差のあるものが有意差がないと いう結論になる。( 3 )
得られた回帰式が使いものにならない。(区聞が広くて推定が役に立たない。)
なお,ばらつきの分解にあたっては,多くのデ ータをとってヒストグラムを作成するのがよい が,少ないデータで行わざるを得ない場合も考 えられるので,正規確率紙を用いる場合につい て紹介する。
3 . 2 1
つの分布:定数項のみの回帰一つのタイプの紙ヘリコプターを多数機作成 して飛行させたデータは,一つの正規分布に従
うことが期待される。これは,回帰分析として は定数項のみの回帰式と考えることができる。
この段階から回帰診断を行う習慣を身につける ことは重要である。また,この段階での回帰診 断は直感的にも分かりやすいので学習上の効果 も高
L
、。この場合の回帰診断では以下の3
点を 吟味する。(1)残差の吟味 (t値でチェック)
( 2 )
正規性の確認(正規確率紙でチェッグ)( 3 )
データの独立性(ダービンワトソン比で チェック)3 . 3 2
つの分布:1変数の回帰(単回帰分析 の基礎)3 . 3 . 1
質的変数が一つで水準が2
の回帰 紙質を2
種類用いて,同ーのデザインの紙ヘ リコプターをn
機ずつ作成して飛行させたデ ータは,分散の等し1,、2つの正規分布に従うこ とが期待される。ただし,平均値に関しては同 じ場合もあるし異なる場合もある。実験として は平均値が異なるような紙質を用いるとよい。このときの回帰診断では以下の点を吟味する。
[ A ]
各々の分布に関しての吟味( 1 )
残差の吟味 (t値でチェッグ)( 2 )
正規性の確認(正規確率紙でチェック)( 3 )
データの独立性(ダービンワトソン比で チェック)[ B ] 2
つの分布に関しての吟味 (1) 等分散( 2 )
質的変数が一つ(2
水準)の回帰のもと での残差の吟味【時間短縮法】
3 . 2
の実験の結果を利用して(こ れを第 l水準のデータとして),これとは別の もう一つの紙質のデータをとったら両者を合わ せてこの実験とすることができる。3 . 3 . 2
量的変数の場合には直線回帰 重り(クリγ
プ)を2
水準(第l
水準はグリ ップ1
個,第2
水準はクリップ3
個)用いて,同ーのデザインの紙ヘリコプターを
n
機ずつ 作成して飛行させたデータは,分散の等しい2 つの正規分布に従うことが期待される。この場 合滞空時間の平均値は必ず異なり,重い場合は( 5 0 )
短く軽い場合は長くなる。このときの回帰診断 では以下の点を吟味する。
[A]各々の分布に関しての吟味
(1) 残差の吟味 (t値でチェック)( 2 )
正規性の確認(正規確率紙でチェック)( 3 )
データの独立性(ダーピンワトソン比で チェック)[B] 2つの分布に関しての吟味 (1) 等分散
( 2 )
量的変数が一つの回帰のもとでの残差の 吟味[ C ]
推定と確認実験各水準の平均値を平均してクリップが
2
個の 場合の平均値を推定する。改めてn機を作成 し,クリップを2
個付けて飛行させて平均値を 求め,確認する。【時間短縮法】重りのみが異なるので,
n
機の 機体を lセットだけ作り,これをグリップの数 だけ変更して3
回利用する。3 . 4 1
変数実験:単回帰分析3 . 4 . 1
直線回帰(範囲が狭い場合)3 . 4 . 1 . 1
内挿による推定が成功する実験 翼長が6と 1 0
の場合に対して各n
機ずつの実 験を行い,この結果得られた回帰式で翼長8
を 推定し,その上で確認実験を行う。[A]量的変数が一つの回帰のもとでの残差の
吟味(1) t値による吟味
( 2 )
正規確率紙による吟味( 3 )
時系列の観点の吟味(ダービンワトソン 比を含む)[B]推定と確認実験
得られた回帰式に翼長
8
を代入して推定す る。推定の後で改めて翼長が8
のn
機を作成 して飛行させ平均値を求め,確認する。【時間短縮法】翼長1
0
の機体がn
機あるので,これをカットして翼長
8
の機体をn
機作成す る。3 . 4 . 1 . 2
外挿による推定が失敗する実験 すでに前の実験で翼長が6
,8
,1 0
の結果が 得られているので,このデータから求めた回帰式を用いて翼長が
1 5
の場合の滞空時聞を推定す る。推定の後で改めて翼長が1 5
のn
機を作成 して飛行させ平均値を求め,確認する。この実 験によって外挿が危険であることを理解する。【時間短縮法】この実験方法自体が時間短縮法 になっている。正式には翼長が
6
,8,1 0
の実 験から始めなければならないのである。3
省4 . 2
曲線回帰(範囲が広い場合) すでに前の実験で翼長が6
,8,1 0
の結果が 得られているので,翼長が16
の実験のみを行 う。翼長が6
,8,1 0
,1 6
のデータで2
次の曲 線回帰式を求める。この段階でも前述の回帰診断は必ず行う。以 後,回帰診断は必ず行うこととして,回帰診断 に関する記述は省略する。
この式に翼長1
5
を代入して推定する。すでに 前の実験で得られている翼長15
の結果と推定と の比較を行う。【時間短縮法】この実験方法自体が大幅な時間 短縮法になっている。正式には翼長が
6
,8
,1 0
,1 6
の実験から始め,翼長15
の確認実験も改 めて機体を製作して行わなければならないので ある。3.5 2
変数実験:基本的な重回帰分析/等高 線図の作図が可能な場合2
変数の実験の解析は等高線図を用いて行う ことができる。そして,実験の範囲が広くなけ れば,同じデータを用いて重回帰分析を行うこ とが出来る場合も少なくない。重回帰分析が適 用できれば,分析が楽にな4るとともに,回帰診 断が可能になる。したがって,等高線図を作成 して概形を確認し単純な形状であった場合には 重回帰分析を適用すべきである。しかし,範囲 をかなり広くとるともはや低次の式で近似する ことは困難になり,その場合には等高線図を用 いる方が望ましくなる。3 . 5 . 1
等高線図による解析翼長と翼幅を各々
4
水準ずつ取り上げて,1 6
種類の紙ヘリコプターを製作し,飛行させて等 高線図を作成する。これより,指定した条件 (翼長,翼幅)のもとでの滞空時聞を予測し,確認実験を行う。誤差が小さければ十分精度の よい推定が可能である。この場合,等高線の作 図は誤差を考慮して描くことがポイントであ る。事し誤差が十分小さくない場合には,機体 を複数作成したり,飛行を複数回試みたりし て,そのもとでの平均値を用いるようにする。
また,実験に不安(製作や飛行や計測にたまに 異常なことが起こる)を感じた場合にはメジア
ンを採用する。
3 . 5 . 2
重回帰分析等高線図で用いた同じデータで重回帰分析 (必ず
2
次の項まで用いる)を行い,両者の比 較をするとよい。重回帰分析を適用すると,回 帰診断が可能になり,有効な情報を手に入れることができる。
3
圃5.3
重回帰分析の適用が危険で等高線図 の方が望ましい場合応答局面の模様が複雑に変化している場合に は重回帰分析の適用を避けなければならない。
実験条件の範囲をかなり広くとるとこの状態に なる。あえて重回帰分析を適用した場合と,等 高線図で推測した場合を比較するとよい。重回 帰分析の適用限界を知るためにも,これは一度
トライすべきである。
3 . 6 3
変数実験:重回帰分析3.6.1
質的変数が入った3
変数実験: 2
枚 の等高線図の作図が可能な場合 前節で述べた2変数(翼長と翼幅)各4水準 で16
機の実験を2
種類の紙のもとで実施する。この場合には,各々の紙ごとに等高線図で解析 するとともに,各々に対して重回帰分析も実施 する。
2
種類の紙のもとでの結果が似ている場 合には,紙質を質的変数として3
変数の重回帰 分析を行う。この分析では32
機のデータがすべ て用いられる。2
つの等高線図がおおむね同じで,平均だけ が異なるという場合には質的変数の意味が直感 的に理解できる。3 . 6 . 2
量的変数のみの3
変数実験:全体を 一望する等高線図が作図できない場A
1=13
変数がすべて量的変数の(翼長,翼幅,足 幅)の実験を行う。この場合3
枚の等高線図で 表現することも可能であるが,作図が大変で、あ ることと,3
枚の等高線図から全体を読みとる ことも大変なので,等高線図の作図は行わな い。したがって,最初から重回帰分析を適用す る。ただし,範囲については広くふらないよう にする。3 . 7 6
変数実験:最終目的の重回帰分析6
変数(紙質,翼長,翼幅,足長,足幅,重 り)の実験を行う。各々の水準を2
水準とし,L 3 2
の直交表を用いて割付て実施する。この実 験では変数の数が多いので,機体製作や重りの 数そして飛行の順番などを間違えないようにす るために実験の管理を十分慎重に行う必要があ る。3 . 8
実施方法以上のカリキュラムのうちで最も重要な「実 験誤差の管理」と
1 6
変数実験」の具体的な実 施の方法について,前者を第4
章で後者を第5
章で紹介する。なお,他のカリキュラムについ ては紙数の都合により割愛する。4 . 1
ぱらつきの分解実験のばらつきは大きく
3
つの要素に分解す ることができる。σ ' T 2 = σ p 2 + σ F 2 + σ M 2
( T o t a
l)( P r o d u c t i o n ) ( F l i g h t ) ( M e a s u r m e n t )
σT2:
全体のばらつき σp2:製作のばらつきσF 2
:飛行のばらつきσM2:
計測のばらつき4 .
1.1 3
種類の実験実例で紹介する実験では,経験者が慎重に作 成して飛行したものであるため,各々のばらつ きの値は比較的小さい。
この実験では全部で1
0
機作成する。(1)第 lの実験
σ1 2 : n
機の機体を l回飛行( 1
号機から9
号機を使用)σ12=σT 2
= 昨2+σ i +
(1M2
9
機を各I
回飛行した結果の正規確率紙を図4 . 1
に示している。図より (11 2
の推定値は5 . 7 2
ニ
3 2 . 4 9
となっている。(2) 第2の実験
σ i :
1機の機体をn
回飛行( 1 0
号機を使用)σ22
ニσ i+ σM 2
9 9 . 9 9 9 9 . 9 5 9 9 . 9
4 .
実 験 誤 差 の 管 理 : 全 て の 基 礎9 9 . 5
以後の実験では各種の条件を変更して結果を 観測するわけであるが,同一条件のもとでの繰 り返し(製作+飛行+計測)を行った場合のば らつきは実験誤差であり,これが十分管理され ないと実験で何を調べているのかが分からなく なる。紙ヘリコプターは製作を慎重に行わない とぱらついてしまうし,とても軽くて脆弱なの で飛行方法を注意しないと飛行がばらついてし まう。計測は滞空時聞をストップウオッチで測 るので一瞬のタイミングの狂いで大きなばらつ きを生じてしまう。
実験を開始する前に,実験誤差を管理するこ とはとても重要である。
寸 ﹄ ﹁
+
+
吋
﹄T
4 ﹄ ﹁
吋﹄ ﹁
vanUμFAυAUnunUAυnununu nunud司
n NU
円dnozuA
性 向
︒
︒
︒ 守 よ
ド
1
0 . 5 0 . 1 0 . 0 5 0 . 0 1
128 130 132 134 136 1 3 8 1 4 0 142
図4 . 1 第 1
の実験の正規確率紙( 5 2 )
9 9 . 9 9 9 9 . 9 5 9 9 . 9 9 9 . 5 99
9
唱: 2
II I I I I I I I I │ ν
γ ー ーーー‑17
80 70 6
日1~
1
0 . 5
ハU
A 品告
玄
唱i
︒ ︒
η ο
?
4 α U η o
噌i
4n
坐望
内o
唱' AA
9血
Q υ
唱i
AU η九ou
噌i
n M6
U
の ︐4
唱i
n0
の
︐4
' iF z
h υ 唱i噌E
) 0 0 (
‑
‑ n u n u
図4
. 2 第 2
の実験の正規確率紙l
機を9
回飛行した結果の正規確率紙を図4.2
に示している。図よりσ i
の推定値は4. 92
=24.01
となっている。( 3 )
第3
の実験σ 3 2 :振り子の振幅を n回計
測σ 3 2=σM2
時間間隔が一定でかつ真値が分かるものとし て糸と重りで、作った振り子を用いて計測誤差を 評価する。振り子のー往復の時聞を計測した
9
回の結果の正規確率紙を図4 . 3
に示している。図より
σ l
の推定値は4. 6 2 = 2
1. 16
となってい る。なお,振り子の周期は糸の長さをm
(メ ートノレ)単位でLとすると,次式で求めるこ とができる。T=2π
♂疋g=9.8 ( m ! s 2 )
この実験では
L=0.54 (m)
で,T =
1. 48 ( s ;
秒)である。図4. 3
より正規確率紙による平均 は1.4 9
(s)なので理論値に対してバイアスが ないことも分かる。また,9
個のデータのメジ アンも1.4 9 ( s )
である。4 .
1.2
n機の2
回 飛 行 (1
号機‑9
号機を再 飛行)飛行行為は飛行時と着床時に機体にダメージ
9 9 . 9 9 9 9 . 9 5 9 9 . 9 9 9 . 5 99
95 90
*
80 70 60 50 40 30 20
山
V
1
0 . 5
n u
v o
噌i
At
v o
唱i
QG F0
41
AU
Hhu
唱i
a u
A時A
4i
a υ
a n
宝
噌i
aせ4 'i
qa
d坐1ム
唱4
F 0
4よ
︑ ︐
n u n U [
‑ n u n U
図4
. 3 第 S
の実験の正規確率紙 を与える。また,飛行回数n
が大きいと飛行 のための取扱いの中で機体の状態を変更してし まう危険が高い。そこで,n
機の各々を2
回飛 行させ各々の2
回の結果の差の絶対値である範囲
R ( R a n g e )
からσ22=σF 2 +σM 2
を求めることが考えられる。
σ 2
はCR!d 2 )2= (R!
1. 12 8 ) 2
で求められる。これで、求めた結果と,
1
機n
回 飛行で、求めた結果を比較するとよい。第
l
の実験で飛行させた9
機を再度飛行させ て求めた結果は表4 .1
である。表
4 . 1より, (R!d 2 )2=4. 7 2=22. 28
となって いる。この結果は第2
の実験より正規確率紙で 求めた値と整合している。したがって,この実 験では機体は慎重に扱われ,多数回の繰り返し表 4 . 1 9 機 各 2
回飛行の範囲R
機体N o . 1 1 2 3 4 5 6 7 8 9
I計
l
回目 1 1 3 11 2 8 1 3 8 1 2 7 1 3 1 1 3 7 1 3 0 1 3 4 1 3 2
2 回目 1 1 3 81 3 4 135132122131127138137
範囲 R 1 7 6 3 5 9 6 3 4 5 1 4 8
飛行にもかかわらず問題となるようなダメージ を受けていないと判断できる。
4 . 1 . 3
各ぱらつきの把握3
種類のばらつきの値は以下のようにして求 めることができる。なお,すべてを正規確率紙 から求めた値で、揃えて計算している。σp2
ニσ1 2
一σ i = 5 . 7 2 ‑4. 9 2 =2. 9 2
σF 2
ニσ22
ーσ l=4. 9 2 ‑4. 6 2 =
1.7 2 σ M 2 = σ l =4.6 2
寄与率とは各ばらつきが全体の中で占める割合 のことであり,以下のようになる。
製作のばらつきの寄与率二
2 . 9 2 / 5 . 7 2
ニ
0 . 2 6 ( 2 6 % )
飛行のばらつきの寄与率=1.7 2 / 5 . 7 2
=0.09 ( 9%)
計測のばらつきの寄与率=4.6 2 / 5 . 7 2
=0.65 (65%)
これより,計測のばらつきが問題であることが 分かる。4 .
1.4
ぱらつきの低減寄与率の大きなばらつきの低減をはかる。今 回の結果では計測のばらつきが問題である。こ れに対して以下の対策を行った。
9 9 . 9 9 9 9 . 9 5 9 9 . 9 9 9 . 5 99
95 90
*~可~司E司F司ー-r-引ー-,-ー←→ーー→-.-
8 0 70 6 0 5 0 4 0 3 0 2 0 1 0
ノζ1
0 . 5 0 . 1 0 . 0 5 0 . 0 1
136 138 140 142 144 146 148 150
図4 . 4
改善された計測に関する正規確率紙[ A J
計測に関しての対策( 1 ) 3
人がストップウオッチで同時に計測し て,メジアン(大きさの順に並べて2
番目の値) を採用する。この対策のもとで、振り子の実験を行ったところ 図
4 . 4
の正規確率紙の結果を得た。図よりσ'32
の推定値は
2 . 4 2
ニ5 . 7 6
となっている。したがっ て,計測のばらつきが4 . 6 2 =2
1.1 6
から2 . 4 2
ニ5 . 7 6
になり,もとのばらつきの約2 / 3 ( 5 . 7 6 / 2
1.16=0.27)
へと低減することができた。し たがって,ばらつきは約1 / 4
に低減されてい る。また,飛行においては以下の(2 )
と( 3 )
を,製 作に関しては(4 )
と( 5 )
の対策を行った。[BJ飛行に関しての対策
( 2 )
飛行の際にカウントダウンする。(例え ば 「 さ ん に い ち は い !J)( 3 )
床にお盆を置き,着床の瞬間クリップが お盆に当たり音がでるようにする。[ C J
製作に関しての対策( 4 )
紙をカットする際に鉄ではなくカッター と定規を用いて正確な直線に切る。このことは製作時聞を短縮で、きかっ紙に簸や査 みを与えない。
9 9 . 9 9 9 9 . 9 5 9 9 . 9 9 9 . 5 99
んom
﹂ 呼
ν
1 0 . 5
︒AA告 噌i
A υ
a n
ヨti
n δ
︒ ︒
句よ
n o qd
噌i
バ せ
η︒
噌i
︒ ︐
︒
61ムハu
n o
噌i
06
04
1 5 1 1
aoo ハ
υ n U
図
4 . 5
改善された誤差に関する正規確率紙( 5 4 )
( 5 )
翼を一端折りつぶしてから戻して9 0
度に するのは紙にストレスを加えることになる。こ れを避けるため,直角になっている角(フロγ
ピーの箱,積み木など)を用いて最初から
9 0
度 に折る。以上の対策のもとで,改めて
9
機作成し飛符 .計測した結果の正規確率紙を図4 . 5
に示して いる。全体のばらつきが5 . 7 2 =32.49
から4 . 7 2
ニ22.09
に な り , も と の ば ら つ き の 約2/3 (22.09/32.49=0.68)
へと低減することができ た。5 . 6
変数の重回帰分析重回帰分析のゴールとして,
6
変数の重回帰 分析を体験する必要がある。本章では,実際に 行われた重回帰分析を紹介する。なお,分析の プロセスで重要な結果を示す。また,i m i c r o ‑ CDAJ
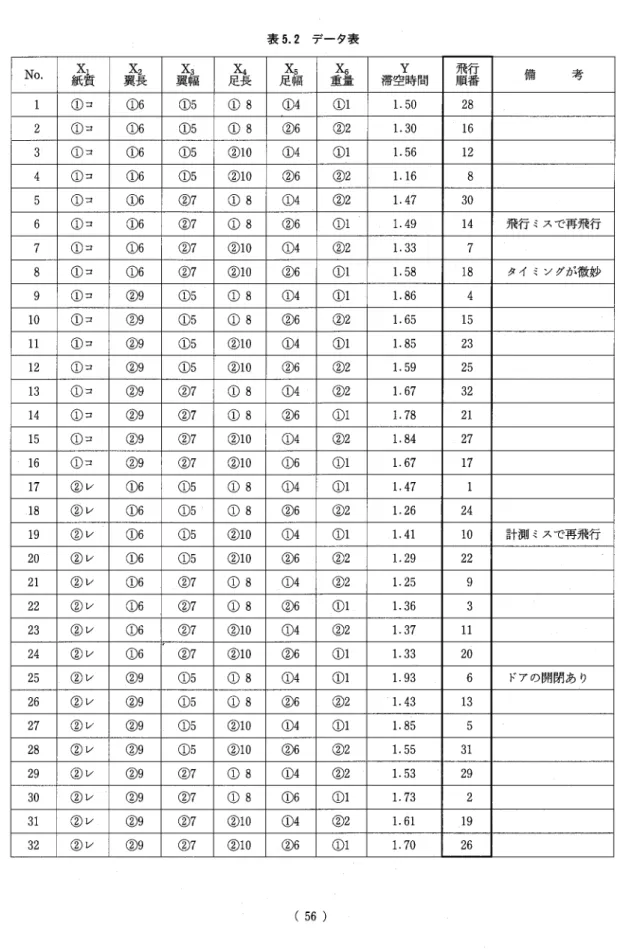
の使用状況を明らかにするため,各々 の分析における対象のメニューとそのなかのど のメニューを選択したかについても合わせて示 す。5 . 1
実験の条件と実験結果実験で取り上げる変数とその水準を表
5 . 1
に 示す。この実験では質的変数を 1,量的変数を5
の合計6
変数を取り上げている。水準はいず れの変数も2であり,その幅は狭い範囲で、取っ ている。したがって,応答局面に関しては平面 近似を考えている。また,重回帰分析にあたっては交互作用項を取り上げずに分析している。
5 . 2
紙ヘリコプターの滞空時間に関する重 回帰分析の解析例本節では
micro‑CDA
で解析した結果を要約 して示す。ここではまず実験で、得られたデータ をそのまま用いて変数選択し推定と確認実験 まで行う。その上でこの結果に基づいて次節で 団帰診断を行う。5 . 3
確認実験の実施上記の解析の中で、行った予測(データを取っ た範囲の内側,すなわち内挿での予測であるこ とに注意)に対して,実際に
5
機の紙ヘリコプ ターを作り飛行させて確認した。紙質=コピー用紙,翼長=
7
,翼幅=6
, 足 長 さ =9, 足 幅 =4,重さ=1
→ 予 測 値=1.67l号機1.
6 6
,2
号機1.6 3
,3
号機1.6 0
,4
号機1.6 1
,5
号機1.6 5
→平均値=1.63 確認の結果は予測と比較的よく整合していることが確認で、きた。
5 . 4
残差の検討全体としては解析はおおむね満足で、きるもの であるが,図
5 . 8
の残差で気になる機体が5
機 ある。また,確認実験で飛行させた5
機はすべ て予測値を下まわっている点も気になる。問題 となる機体のうち1 5
号機と2 5
号機はt値の絶対 値が2を越えている。また, 4号機と 8号機は t 値の絶対値が極めて2
に近い。したがって,この
4
機について検討してみた。表
5 . 1 9
機各2 回飛行の範囲 R
No.
変数の記号 変数の内容 単位 コ ドX 1
紙質種 類
①:コピー用紙 ,②:レポート用紙2 X
2 翼の長さ目盛り
① :6
,①:9 3 X 3
翼の幡目盛り
① :5
,②:7 4 X 4
足の長さ目盛り
① :8
,②:1 0 5 X 5
足の幅目盛り
① :4
,②:6 6 X 6
重さ クリップP ①:クリップ1
個,②:クリップ2
個Y 滞空時間 1
秒 有効数字は0. 0 1
秒(計測最小単位)表 5 . 2 データ表
N o . 色 よ 量 長 翼
X幅 3 足
X長 4 足
X幅 5 重 量 滞空時間
Y 飛順番行備
考1
①コ ①6 ①5 ①8
①4 ①l 1. 50 2 8
2
①コ ①6 ①5 ①8
②6 ②2 1. 30 1 6 3
①コ ①6 ①5 ②10
①4 ①l 1. 56 1 2 4
①コ ①6 ①5 ②10
②6 ②2 1.1 6 8 5
①コ ①6@7
①8
①4 ②2 1.4 7 3 0
6
①コ ①6@7
①8
②6 ①l 1.4 9 1 4
飛行ミスで再飛行7
①コ ①6@7
②10
①4 ②2 1. 33 7
8
①コ ①6 ②7 ②10
②6 ①1 1. 58 1 8
タイミングが微妙9
①コ ②9 ①5 ①8
①4 ①l 1. 86 4
1 0
①コ ①9 ①5 ①8
②6 ②2 1. 65 1 5 1 1
①コ ②9 ①5 ②10
①4 ①l 1. 85 2 3 1 2
①コ ②9 ①5 ②10
②6 ②2 1.5 9 2 5 1 3
①コ ②9 ②7 ①8
①4 ②2 1.6 7 3 2 1 4
①コ ②9 ②7 ①8
②6 ①l 1. 78 2 1 1 5
①コ ②9 ②7 ②10 C D 4
②2 1. 84 2 7 1 6
①コ ②9 ②7 ②10
①6 ①l 1. 67 1 7 1 7
②レ ①6 ①5 ①8
①4 ①1 1. 47
l1 8
②レ ①6 ①5 ①8
②6 ②2 1. 26 2 4
1 9
②レ ①6 ①5 ②10
①4 ①1 1. 41 1 0
計 測 ミ ス で 再 飛 行2 0
②レ ①6 ①5 ②10 @6
②2 1. 29 2 2
2 1
②レ ①6 ②7 ①8
①4 ②2 1. 25 9 2 2
②レ ①6 ②7 ①8 @6
①1 1. 36 3 2 3
②レ ①6 ②7 ②10
①4 ②2 1. 37 1 1 2 4
②レ ①6 ②7 ②10
②6 ①1 1. 33 2 0
2 5
②レ ②9 ①5 ①8
①4 ①l 1. 93 6 ドアの開閉あり 2 6
②レ ②9 ①5 ①8
②6 ②2 1. 43 1 3
2 7
②レ ②9 ①5 ②10
①4 ①l 1. 85 5 2 8
②レ ②9 ①5 ②10
②6 ②2 1. 55 3 1 2 9
②レ ②9 ②7 ①8
①4 ②2 1. 53 2 9 3 0
②レ ②9 ②7 ①8
①6 ①1 1. 73 2 3 1
②レ ②9 ②7 ②10
①4 ②2 1. 61 1 9 3 2
②レ ②9 ②7 ②10
①6 ①l 1. 70 2 6
( 5 6 )
m i c r o
‑CDA ( R e g r e s s i o n ) v e r s i o n ' 9 0 . 1 0 . 2 3 by T . HAGA ‑ ‑ D a t a F i l e : KAMIHERI (n=32 p=7) 9 5 ; 0 5 ; 0 7 1 3 : 1 2 : 0 5
1 KAMI 1 6 1 6
) L i s t
,F u n d . ‑ s t a t
,Graph
,V a r .
,Monit
,Reg o r End
L1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2
噌 上 司
i 1
ょ
ti
唱i噌i
噌 よ
1i
唱i噌
i n 4 n 4 n︐
u η 4 η L n︐ ︒
4
︒ ︐ ︒
L η L q o q o q a
滞空時間
7 TIME
1.
500
1.300
1.5 6 0
1.160
1.470
1.490
1.330
1.580
1.860
1.6 5 0
1.850
1.590
1.670
1.7 8 0
1.8 4 0
1.6 7 0
1.470
1.260
1.410
1.290
1.250
1.3 6 0
1.3 7 0
1.330
1.930
1.430
1.8 5 0
1.5 5 0
1.5 3 0
1.730
1.6 1 0
1.7 0 0 重さ
6 OMOS
1.0 0 0 2 . 0 0 0
1.000 2 . 0 0 0 2 . 0 0 0
1.0 0 0 2 . 0 0 0
1.0 0 0
1.0 0 0 2 . 0 0 0
1.0 0 0 2 . 0 0 0 2 . 0 0 0
1.0 0 0 2 . 0 0 0
1.0 0 0
1.0 0 0 2 . 0 0 0
1.000 2 . 0 0 0 2 . 0 0 0
1.0 0 0 2 . 0 0 0
1.0 0 0
1.0 0 0 2 . 0 0 0
1.000 2 . 0 0 0 2 . 0 0 0
1.0 0 0 2 . 0 0 0
1.000 足の幅
5 AHAB 4 . 0 0 0 6 . 0 0 0 4 . 0 0 0 6 . 0 0 0 4 . 0 0 0 6 . 0 0 0 4 . 0 0 0 6 . 0 0 0 4 . 0 0 0 6 . 0 0 0 4 . 0 0 0 6 . 0 0 0 4 . 0 0 0 6 . 0 0 0 4 . 0 0 0 6 . 0 0 0 4 . 0 0 0 6 . 0 0 0 4 . 0 0 0 6 . 0 0 0 4 . 0 0 0 6 . 0 0 0 4 . 0 0 0 6 . 0 0 0 4 . 0 0 0 6 . 0 0 0 4 . 0 0 0 6 . 0 0 0 4 . 0 0 0 6 : 0 0 0 4 . 0 0 0 6 . 0 0 0 足の長さ
4 ANAG 8 . 0 0 0 8 . 0 0 0 1 0 . 0 0 0 1 0 . 0 0 0 8 . 0 0 0 8 . 0 0 0 1 0 . 0 0 0 1 0 . 0 0 0 8 . 0 0 0 8 . 0 0 0 1 0 . 0 0 0 1 0 . 0 0 0 8 . 0 0 0 8 . 0 0 0 1 0 . 0 0 0 1 0 . 0 0 0 8 . 0 0 0 8 . 0 0 0 1 0 . 0 0 0 1 0 . 0 0 0 8 . 0 0 0 8 . 0 0 0 1 0 . 0 0 0 1 0 . 0 0 0 8 . 0 0 0 8 . 0 0 0 1 0 . 0 0 0 1 0 . 0 0 0 8 . 0 0 0 8 . 0 0 0 1 0 . 0 0 0 1 0 . 0 0 0 翼の幅
3 THAB
5 . 0 0 0 5 . 0 0 0 5 . 0 0 0 5 . 0 0 0 7 . 0 0 0 7 . 0 0 0 7 . 0 0 0 7 . 0 0 0 5 . 0 0 0 5 . 0 0 0 5 . 0 0 0 5 . 0 0 0 7 . 0 0 0 7 . 0 0 0 7 . 0 0 0 7 . 0 0 0 5 . 0 0 0 5 . 0 0 0 5 . 0 0 0 5 . 0 0 0 7 . 0 0 0 7 . 0 0 0 7 . 0 0 0 7 . 0 0 0 5 . 0 0 0 5 . 0 0 0 5 . 0 0 0 5 . 0 0 0 7 . 0 0 0 7 . 0 0 0 7 . 0 0 0 7 . 0 0 0 翼の長さ
2 TNAG 6 . 0 0 0 6 . 0 0 0 6 . 0 0 0 6 . 0 0 0 6 . 0 0 0 6 . 0 0 0 6 . 0 0 0 6 . 0 0 0 9 . 0 0 0 9 . 0 0 0 9 . 0 0 0 9 . 0 0 0 9 . 0 0 0 9 . 0 0 0 9 . 0 0 0 9 . 0 0 0 6 . 0 0 0 6 . 0 0 0 6 . 0 0 0 6 . 0 0 0 6 . 0 0 0 6 . 0 0 0 6 . 0 0 0 6 . 0 0 0 9 . 0 0 0 9 . 0 0 0 9 . 0 0 0 9 . 0 0 0 9 . 0 0 0 9 . 0 0 0 9 . 0 0 0 9 . 0 0 0 紙質
ー閲
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2
臥
データのリスト
図5 . 1
F )List
,Fund.stat
,Graph
,V a r .
,M O I l i t
,Regor End
v a r i a b l e mean ロ l l l l l m u
口1maxlmum s t d . d e v . C . V . s k e w n e s s k u r t o s i s 2TNAG 7 . 5 0 0 6 . 0 0 0 9 . 0 0 0
1.5 2 4 0 . 2 0 3 0 . 0 0 0 ‑2.138
本3THAB 6 . 0 0 0 5 . 0 0 0 7 . 0 0 0
1.0 1 6 0 . 1 6 9 0 . 0 0 0 ‑ 2 . 1 3 8 * 4ANAG 9 . 0 0 0 8 . 0 0 0 1 0 . 0 0 0
1.0 1 6 0 . 1 1 3 0 . 0 0 0 ‑2.138
地5AHAB 5 . 0 0 0 4 . 0 0 0 6 . 0 0 0
1.0 1 6 0 . 2 0 3 0 . 0 0 0 ‑ 2 . 1 3 8 * 60MOS
1.5 0 0
1.0 0 0 2 . 0 0 0 0 . 5 0 8 0 . 3 3 9 0 . 0 0 0 ‑ 2 . 1 3 8 * 7TIME
1.5 4 3
1.16 0
1.9 3 0 0 . 2 0 7 0 . 1 3 4 0 . 1 3 2 ‑0.905 C o r r e l a t i o n M a t r i x
2TNAG 3THAB 4ANAG 5AHAB 60MOS 7TIME 2TNAG
1.0 0 0 0
3THAB 0 . 0 0 0 0
1.0 0 0 0
4ANAG 0 . 0 0 0 0 0 . 0 0 0 0
1.0 0 0 0
5AHAB 0 . 0 0 0 0 0 . 0 0 0 0 0 . 0 0 0 0
1.0 0 0 0
60MOS 0 . 0 0 0 0 0 . 0 0 0 0 0 . 0 0 0 0 0 . 0 0 0 0
1.0 0 0 0
7TIME 0 . 7 8 3 1 0 . 0 0 7 7 0 . 0 0 1 5 ‑0.2498 ‑0.4245
1.0 0 0 0
図5 . 2 基本統計量
hust
,F M
S t d f ( t ) s i g ( t )
1.3 3 1 3 1 0 . 2 0 7 v a r . Se D(S) F b
OCON 7 7 . 4 9 9 7 6 . 1 6 9 %1774
.49 7
1.5 4 3 1KAMI
1.2 8 3 0 . 0 4 7
1.10 5
(一)2TNAG 0 . 5 1 5 ‑0.816 4 7 . 5 6 7 ( + ) 3THAB
1.3 3 1 ‑0.000 0 . 0 0 2 ( + ) 4ANAG
1.3 3 1 ‑0.000 0 . 0 0 0 ( + ) 5AHAB
1.2 4 8 0 . 0 8 3
1.9 9 6
(一)60MOS
1.0 9 1 ‑0.240 6 . 5 9 4
(ー)図
5 . 3
定数項のみの回帰R ) Se
,.lB‑&
ーC a t .S c .
,C a t . P o o l
,R e s i d u a l
,P r e d .
,L i s t
,M a t r i x o r End S2
E n t e r Se R 2 R* 2 R** 2 d f ( e ) s i g ( e ) 2TNAG 0 . 5 1 5 6
1.32% 60.03% 58.82% 3 0 0 . 1 3 1 v a r . Se D(S) F b
OCON
1.19 7 0 . 6 8 2 3 9 . 7 5 3 0 . 7 4 4 1KAMI 0 . 4 6 7 ‑0.047 2 . 9 3 4
(ー)2TNAG
1.3 3 1 0 . 8 1 6 4 7 . 5 6 7 0 . 1 0 6 3THAB 0 . 5 1 5 ‑0.000 0 . 0 0 4 ( + ) 4ANAG 0 . 5 1 5 ‑0.000 0 . 0 0 0 ( + ) 5AHAB 0 . 4 3 2 ‑0.083 5 . 5 7 9
(一)60MOS 0 . 2 7 5 ‑0.240 2 5 . 2 9 8
(一)図