デプスカメラと加速度センサを用いた歩行可能な平面領域の検出
今井 健太
†北原 格
‡亀田 能成
‡†‡筑波大学 〒305-8573 茨城県つくば市天王台 1-1-1
E-mail: †[email protected], ‡{kitahara, kameda}@iit.tsukuba.ac.jp
あらまし 視覚障がい者が単独で歩行する際,視覚以外での安全確認を行う必要がある.本研究では,デプスカ メラとデプスカメラを取り付けるタブレット端末に内蔵されている加速度センサを用いて,路面上の歩行可能な平 面領域の検出の方法を提案する.まず,デプスカメラから3 次元点群を作成し,各点の法線ベクトルを求める.ま た加速度センサと併用することで,鉛直方向のみの法線ベクトルを選出し,それを用いて,水平面領域を検出し, 路面上の歩行可能な平面領域の検出とする. キーワード 視覚障がい者,単独歩行支援,デプスカメラ,加速度センサ
1. は じ め に
現 在 , 日 本 の 視 覚 障 が い 者 の 数 は 約 31 万 人 に 達 し て お り[1],単 独 で 外 出 す る 際 ,白 杖 の 携 帯 が 義 務 付 け ら れ て い る . 白 杖 は , 直 接 路 面 に 触 れ る こ と で , 障 害 物 や 段 差 の 有 無 を 判 断 す る こ と が で き る . し か し , 白 杖 は ,検 出 範 囲 が 白 杖 の 長 さ に 依 存 す る た め1m~2m と 狭 く , 前 方 に 下 り の 段 差 が 存 在 す る と , 段 差 後 の 路 面 に 白 杖 が 届 か な け れ ば , 段 差 後 の 路 面 状 況 を 把 握 で き な い . ま た , 進 行 方 向 の 路 面 上 の 状 況 を 把 握 す る の に は 時 間 が か か る た め , 晴 眼 者 よ り も ゆ っ く り 歩 く 必 要 が あ る . 以 上 の 背 景 を ふ ま え , 視 覚 障 が い 者 の 安 心 , 安 全 な 単 独 歩 行 の 実 現 を す る た め に , 白 杖 の 補 填 , 代 用 と な る よ う な シ ス テ ム の 開 発 が 行 わ れ て い る . そ の 1 つ と し て ,LRF(レ ー ザ レ ン ジ フ ァ イ ン ダ )や Microsoft 社 の Kinect を 用 い る シ ス テ ム が あ る . LRF を 用 い た シ ス テ ム[2]で は ,路 面 全 体 の 状 況 を 把 握 す る の に ,時 間 が か か る .ま たKinect を 用 い た シ ス テ ム [3]で は ,Kinect が 直 射 日 光 下 で の 使 用 が サ ポ ー ト さ れ て い な い た め , 屋 外 で の 使 用 が 困 難 で あ る . 上 述 し た 問 題 を 解 決 す る た め に , 本 研 究 で は , 屋 内 外 で の 中 に お け る 進 行 方 向 の 路 面 上 の 歩 行 可 能 な 平 面 領 域 を 検 出 す る . 路 面 上 の 障 害 物 や 段 差 な ど の 平 面 で な い 領 域 を 実 時 間 で 視 覚 障 が い 者 に 知 ら せ る こ と で , 白 杖 よ り も 早 く , 広 範 囲 で 視 覚 障 が い 者 が 路 面 状 況 の 把 握 を 行 う こ と が 望 ま し い . 本 研 究 で は , デ プ ス カ メ ラ と 加 速 度 セ ン サ を 用 い て , 歩 行 可 能 な 平 面 領 域 を 検 出 す る . 本 研 究 の 目 標 を 達 成 す る た め , デ プ ス カ メ ラ と そ れ を 取 り 付 け る タ ブ レ ッ ト 端 末 に 搭 載 さ れ て い る 加 速 度 セ ン サ の 利 用 が 有 効 で あ る と 考 え て い る . 本 研 究 で 使 用 し て い る デ プ ス カ メ ラ は 屋 外 で の 使 用 も サ ポ ー ト さ れ て い る intel 社 の 3D カ メ ラ の R200 で あ る . こ の カ メ ラ は , 小 型 で あ る た め , 視 覚 障 が い 者 が 歩 行 す る 際 に 携 帯 し て い て も 負 担 が 少 な い . デ プ ス カ メ ラ は 物 体 ま で の 距 離 を 求 め る こ と が 可 能 で あ る た め , 物 体 の 形 状 推 定 も 同 様 に 可 能 で あ る . し か し , デ プ ス カ メ ラ の み を 用 い た 平 面 領 域 の 検 出 で は , 壁 な ど の 路 面 上 で は な い 平 面 領 域 も 検 出 し て し ま う . 本 研 究 の 目 的 は , 路 面 上 の 歩 行 可 能 な 平 面 領 域 の 検 出 で あ る . そ の た め , デ プ ス カ メ ラ に 加 え , タ ブ レ ッ ト 端 末 の 加 速 度 セ ン サ を 用 い る こ と で , 水 平 面 領 域 の み を 検 出 す る . 2 章 に 関 連 研 究 , 3 章 に デ プ ス カ メ ラ と 加 速 度 セ ン サ を 用 い た 路 面 上 の 平 面 領 域 の 検 出 の 概 要 ,4 章 に 3 次 元 点 群 を 用 い た 法 線 ベ ク ト ル の 算 出 ,5 章 に 法 線 ベ ク ト ル を 用 い た 平 面 領 域 の 検 出 ,6 章 は 評 価 実 験 を 記 す .2. 関 連 研 究
2.1. 視 覚 障 がい者 単 独 歩 行 支 援
視 覚 障 が い 者 が 単 独 で 歩 行 す る 際 , 白 杖 を 携 帯 す る 他 に , 盲 導 犬 を 伴 う こ と が あ る . し か し , 盲 導 犬 の 育 成 に は 多 く の 時 間 と 費 用 を 要 す る . そ の た め , 日 本 に は 約 1000 頭 し か お ら ず ,視 覚 障 が い 者 に 比 べ ,数 が 圧 倒 的 に 少 な い . セ ン サ 等 を 用 い た 視 覚 障 が い 者 の 単 独 歩 行 支 援 と し て ,後 藤 ら[2]は ,LRF を 用 い た 歩 行 支 援 シ ス テ ム を 提 案 し て い る .2,3 歩 先 の 地 面 に 向 け て レ ー ザ を 照 射 し て い る た め , 階 段 な ど の 段 差 の 検 知 は 可 能 で あ る . し か し ,1 直 線 方 向 の み の 検 知 と な り , 進 行 方 向 の 路 面 上 全 体 で の 検 知 は 白 杖 同 様 , 方 向 の 切 り 替 え を 行 う 必 要 が あ り , 時 間 が か か る . 滝 沢 ら[3] は , 白 杖 と Microsoft 社 の Kinect を 組 み 合 わ せ た シ ス テ ム を 提 案 し て い る .白 杖 に Kinect を 取 り 付 け ,取 得 し た デ プ ス デ ー タ か ら エ ッ ジ を 抽 出 す る . 抽 出 し た エ ッ ジ か ら , 床 面 や 障 害 物 ,階 段 等 を 検 出 す る 手 法 を 提 案 し て い る . し か し ,Kinect は 直 射 日 光 下 で の 使 用 は サ ポ ー ト さ れ て い な い た め , 晴 天 時 に 屋 外 で 使 用 す る こ と が 困 難 で あ る .速 水 ら[4]は ,ス テ レ オ カ メ ラ の そ れ ぞ れ の カ メ ラ か ら 取 得 し た 画 像 で マ ッ チ ン グ を 行 い , 階 段 を 検 出 一般社団法人 電子情報通信学会 THE INSTITUTE OF ELECTRONICS,INFORMATION AND COMMUNICATION ENGINEERS
HCGシンポジウム2016
HUMAN COMMUNICATION GROUP SYMPOSIUM 2016 HCG2016-D-9-1
す る 手 法 を 提 案 し て い る . こ の 手 法 は , ス テ レ オ 画 像 に 対 し , ハ フ 変 換 を 用 い た 直 線 検 出 を 行 い , 画 像 間 で 直 線 を 対 応 づ け る . 対 応 し た 直 線 付 近 で マ ッ チ ン グ を 行 う こ と で , 階 段 の 検 出 を 実 現 し て い る . 階 段 の 検 出 は , 視 覚 障 が い 者 の 安 全 な 単 独 歩 行 を 可 能 に す る . し か し , 階 段 の み を 検 出 対 象 と し て お り , 路 面 上 の 障 害 物 な ど へ の 対 応 が 困 難 で あ る .
2.2. 平 面 領 域 の検 出 に関 する研 究
内 藤 ら[5]は ス テ レ オ カ メ ラ を 用 い て ,屋 内 の 床 平 面 の 検 出 手 法 を 提 案 し て い る . ス テ レ オ カ メ ラ か ら 取 得 し た 視 差 画 像 を 用 い て , 床 面 視 差 を 示 す 直 線 と 側 面 の 壁 を 示 す 直 線 を 検 出 す る こ と で 床 平 面 と 壁 の 境 界 を 求 め , 床 平 面 領 域 を 検 出 し て い る . し か し , 壁 が な い 屋 外 な ど で の 利 用 は 困 難 で あ る .関 ら[6]は ,自 動 車 の 走 行 中 に 車 載 の ス テ レ オ カ メ ラ を 用 い て , 道 路 上 の 平 面 領 域 の 検 出 を 行 う , 障 害 物 検 出 手 法 を 提 案 し て い る . ス テ レ オ カ メ ラ の 映 像 か ら 空 間 中 の 道 路 領 域 と 道 路 面 と カ メ ラ の 姿 勢 を 動 的 に 推 定 し , 道 路 領 域 と 非 道 路 領 域 を 分 割 し て い る . 計 測 距 離 が 広 範 囲 で あ る が , ス テ レ オ カ メ ラ 間 の 距 離 が 大 き く , 視 覚 障 が い 者 が 持 っ て 歩 く の に 適 し て い な い . ま た ,A.Trevor ら [7]は , 3 次 元 空 間 上 に 点 群 を 作 成 し , 作 成 し た 点 群 の 各 点 の 法 線 ベ ク ト ル を 算 出 し , そ の 法 線 ベ ク ト ル か ら 平 面 領 域 を 検 出 す る 手 法 を 提 案 し て い る . 本 研 究 で は , 平 面 領 域 検 出 の 際 , こ の 手 法 を 用 い て い る .3. デ プ ス カ メ ラ と 加 速 度 セ ン サ を 用 い た
路 面 上 の 平 面 領 域 の 検 出
本 研 究 で は , デ プ ス カ メ ラ を 用 い て 作 成 し た 3 次 元 点 群 と 加 速 度 セ ン サ を 用 い て , 歩 行 可 能 な 平 面 領 域 を 検 出 す る . 本 手 法 の 提 案 手 法 の 概 要 を 図 1 に 示 す . 本 研 究 の 手 法 は 2 段 階 で 構 成 さ れ る . 1 段 階 目 は 、 鉛 直 方 向 の 法 線 ベ ク ト ル の 算 出 で あ る . ま ず デ プ ス カ メ ラ か ら 取 得 し た デ プ ス デ ー タ か ら 3 次 元 点 群 を 作 成 す る . 作 成 し た 3 次 元 点 群 の 各 点 の 法 線 ベ ク ト ル を 算 出 す る . 水 平 面 は 法 線 ベ ク ト ル が 鉛 直 方 向 で あ る . そ の た め , デ プ ス カ メ ラ を 取 り 付 け る タ ブ レ ッ ト 端 末 の 加 速 度 セ ン サ を 用 い る . デ プ ス カ メ ラ を タ ブ レ ッ ト 端 末 に 固 定 し て 取 り 付 け る こ と に よ り , 加 速 度 セ ン サ で 取 得 し た 傾 き を デ プ ス カ メ ラ の 傾 き と で き る . 取 得 し た 傾 き か ら 鉛 直 方 向 以 外 の 法 線 ベ ク ト ル を 取 り 除 く . 2 段 階 目 は , 取 得 し た 3 次 元 点 群 の 法 線 ベ ク ト ル か ら , 平 面 領 域 の 検 出 で あ る . 検 出 し た 平 面 の 方 程 式 を 用 い て デ プ ス カ メ ラ か ら の 距 離 を 算 出 す る . 算 出 し た 距 離 か ら 路 面 上 の み の 平 面 領 域 の み を 検 出 す る .4. 3 次 元 空 間 上 の 点 群 と 加 速 度 セ ン サ を 用 い た
鉛 直 方 向 の 法 線 ベ ク ト ル の 算 出
4.1. フィルタリングしたデプスデータを用 いた
点 群 の作 成
本 手 法 は , デ プ ス カ メ ラ で 取 得 し た デ プ ス デ ー タ を 用 い て 3 次 元 点 群 を 作 成 す る . 取 得 し た デ プ ス デ ー タ に は 小 さ な 欠 損 が 生 じ て い る こ と が あ り , そ の デ プ ス デ ー タ を 用 い て 3 次 元 点 群 を 作 成 す る と , 同 じ く 欠 損 が 生 じ て し ま う . そ の た め ,本 手 法 で は ,3 次 元 点 群 を 作 成 す る 前 に , デ プ ス デ ー タ に フ ィ ル タ リ ン グ を 行 い ,欠 損 を 減 ら す . 今 回 用 い る フ ィ ル タ は , メ デ ィ ア ン フ ィ ル タ で あ る . 図 2 に フ ィ ル タ 適 用 前 と 後 の デ プ ス デ ー タ と ,R200 で デ プ ス デ ー タ と 同 時 に 取 得 可 能 な カ ラ ー デ ー タ を 示 す . 図2 を 見 る と , フ ィ ル タ 適 用 前 に 対 し , 適 用 後 の ほ図
1 提案 手 法 概要
う が , 欠 損 が 減 っ て い る こ と が わ か る . フ ィ ル タ を 適 用 し た デ プ ス デ ー タ を 用 い て3 次 元 点 群 を 作 成 す る .
4.2. 法 線 ベクトルの算 出
作 成 し た 3 次 元 点 群 の 各 点 に お け る 法 線 ベ ク ト ル を S.Holzor ら [8]の 手法 を 用 い て 算 出す る . こ の 手 法 は , 3 次 元 点 群 に 対 し , 積 分 画 像 を 作 成 し , 各 点 の 前 後 間 の 点 の ベ ク ト ル と 左 右 間 の 点 の ベ ク ト ル と の 外 積 を そ の 点 に 対 す る 法 線 ベ ク ト ル と す る .4.3. 加 速 度 センサを用 いた鉛 直 方 向 の
法 線 ベクトルの算 出
水 平 面 の 法 線 ベ ク ト ル は 鉛 直 方 向 で あ る . 鉛 直 方 向 の 法 線 ベ ク ト ル を 算 出 す る た め に , 加 速 度 セ ン サ か ら の 傾 き 情 報 を 利 用 す る . 今 回 デ プ ス カ メ ラ は , タ ブ レ ッ ト 端 末 に 固 定 す る た め , タ ブ レ ッ ト 端 末 の 傾 き と デ プ ス カ メ ラ の 傾 き は 同 期 し て い る . そ の た め , タ ブ レ ッ ト 端 末 の 傾 き か ら ,3 次 元 点 群 の 鉛 直 方 向 が わ か る . 3 次 元 点 群 の 鉛 直 方 向 か ら 閾 値 の 角 度 以 内 の 法 線 ベ ク ト ル の 点 以 外 は 3 次 元 点 群 か ら 取 り 除 く .5. 鉛 直 方 向 の 法 線 ベ ク ト ル を 用 い た
路 面 上 の 平 面 領 域 の 検 出
5.1. 法 線 ベクトルを用 いた平 面 領 域 の検 出
取 得 し た 法 線 ベ ク ト ル を 用 い て , 平 面 領 域 を 検 出 す る .本 手 法 で は A.Trevor[7]の 手 法 を 用 い る .こ の 手 法 は ,3 次 元 点 群 の 各 点 の 法 線 ベ ク ト ル を 順 に ス キ ャ ン す る . 注 目 し て い る 法 線 ベ ク ト ル の 左 側 と 上 側 で 隣 接 し て い る 法 線 ベ ク ト ル と の 距 離 の 差 と 方 向 の 差 が 閾 値 以 下 で あ れ ば , 同 じ 平 面 上 の 点 と し , 同 じ ラ ベ ル を 付 け る .3 次 元 点 群 中 の 全 点 群 に 対 し , ラ ベ ル を 付 け , 同 じ ラ ベ ル の 集 合 を 平 面 と す る . 図3 に , 加 速 度 セ ン サ を 用 い な い 場 合 ( 図 3 左 ) と 用 い た 場 合 ( 図 3 右 ) の 床 と 扉 に 対 す る 検 出 結 果 を 示 す . 今 回 は , 法 線 ベ ク ト ル の 方 向 が 45 度 以 内 の 法 線 ベ ク ト ル の み を 用 い て 平 面 領 域 を 検 出 し た .検 出 し た 平 面 領 域 を 赤 線 で 囲 む . 結 果 を 見 る と , 加 速 度 セ ン サ を 用 い な い 場 合 で は , 床 と 扉 両 方 を 検 出 し て し ま っ て い る が , 加 速 度 セ ン サ を 用 い る こ と で , 床 面 の み を 検 出 で き て い る こ と が 分 か る .5.2. 路 面 上 の平 面 領 域 の検 出
5.1 で 水 平 面 領 域 の 検 出 を 行 っ た が , 水 平 方 向 だ け で は , 路 面 上 だ け で な く , 机 や 車 の フ ロ ン ト な ど も 検 出 す る 可 能 性 が あ る . そ の た め , 路 面 上 の 水 平 面 領 域 の み を 検 出 す る た め , 一 度 検 出 し た 平 面 の 方 程 式 を 用 い て , 点 群 の 座 標 系 の 原 点 で あ る , デ プ ス カ メ ラ か ら 平 面 ま で の 距 離 を 算 出 す る . ま た デ プ ス カ メ ラ は タ ブ レ ッ ト 端 末 に 固 定 さ れ て い る た め , デ プ ス カ メ ラ の 高 さ は タ ブ レ ッ ト 端 末 の 高 さ と 同 じ で あ る . そ の た め , そ の 高 さ を 基 準 と し , そ の 高 さ か ら 閾 値 以 内 の 距 離 に あ る 平 面 の み を 検 出 す る こ と で , 路 面 上 の 水 平 面 の み を 検 出 す る . 図 4 に , 机 と 床 を 含 む 場 合 の 平 面 領 域 の 検 出 結 果 を 示 す .検 出 さ れ た 平 面 領 域 は ,赤 線 で 囲 む . 図 4 左 で は , 机 と 床 の 2 箇 所 を 平 面 領 域 と し て 検 出 し て い る が , 平 面 か ら の 距 離 に 対 し , 閾 値 処 理 す る こ と で , 図 4 右 の よ う に , 床 の み を 平 面 領 域 と し て 検 出 し て い る こ と が 分 か る .図
4 路面 上 の みの 平 面領 域 の 検出
図
3 床面 の み の平 面 領域 の 検 出
図
2 フィ ル タ の適 用
6. 評 価 実 験
6.1. 実 験 概 要
本 実 験 で は ,1 章 で も 述 べ た よ う に , デ プ ス カ メ ラ と し て ,Intel 社 の 3D カ メ ラ R200 を 使 用 す る . R200 の デ プ ス デ ー タ 取 得 範 囲 は 0.5m~4.0m で あ り ,屋 外 で の 使 用 も サ ポ ー ト さ れ て い る .R200 は 赤 外 線 を 照 射 し , ス テ レ オ 計 測 に よ り , デ プ ス デ ー タ を 取 得 し て い る . ま た 屋 外 で は , 赤 外 線 の 照 射 を 止 め , 太 陽 か ら の 赤 外 線 を 利 用 す る .今 回 の 評 価 実 験 で は ,R200 を タ ブ レ ッ ト 端 末 に 固 定 し , 屋 内 外 の 複 数 の 路 面 環 境 に お い て 本 手 法 を 適 用 す る . 本 手 法 を 適 用 し , 白 杖 が 届 く 範 囲 よ り 広 範 囲 に 平 面 領 域 を 検 出 で き て い る か , ま た 実 際 は 平 面 で な い が , 平 面 領 域 と 検 出 さ れ る 原 因 に つ い て 考 察 を 行 う . 今 回 適 用 す る 箇 所 は , 屋 内 外 そ れ ぞ れ に お い て ,白 杖 で の 検 出 が 困 難 で あ る 下 り 段 差 ,上 り 段 差 , 障 害 物 が 前 方 に 存 在 す る 箇 所 で あ る . 今 回 , 階 段 に つ い て の 検 証 は , 段 差 と 同 じ 扱 い と し た . ま た 実 行 環 境 はCPU:Intel Core i7 2.20GHz で ,シ ス テ ム 実 行 時 の fps は1.5 で あ る .6.2. 実 験 結 果
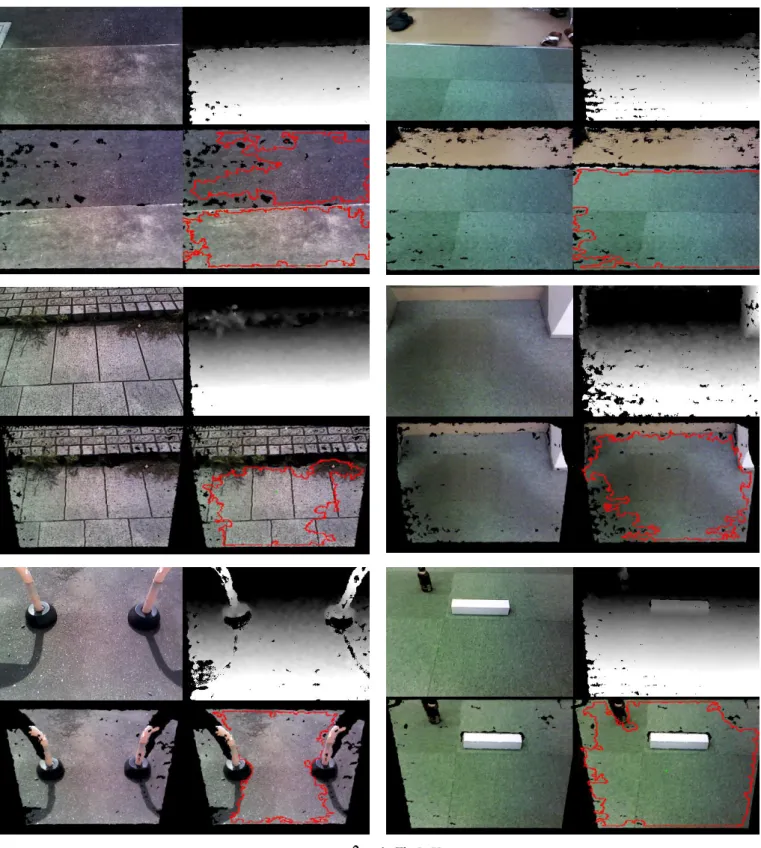
実 験 結 果 を 図 5 に 示 す . 1 つ の 箇 所 に つ い て 4 枚 の 画 像 で 構 成 し て あ り , 左 上 が , カ ラ ー デ ー タ , 右 上 が デ プ ス デ ー タ ,左 下 が ,作 成 し た 3 次 元 点 群 ,右 下 が , 3 次 元 点 群 で 検 出 し た 平 面 領 域 を 赤 線 で 囲 ん だ 画 像 で あ る . 屋 外 で の 実 験 時 , 天 候 は 快 晴 , ま た 全 箇 所 に お い て ,カ メ ラ の 位 置 は 路 面 か ら 約 100cm の 高 さ か ら 撮 影 し た . 以 降 , 各 箇 所 に お け る 結 果 の 検 証 を 行 う . ・ 下 り 段 差 ( 屋 外 )( 図 5 左 上 ) 本 箇 所 で は ,前 方 約 2m に 約 10cm の 下 り の 段 差 が 存 在 す る が , 本 手 法 を 適 用 し た と き , 段 差 前 の 路 面 と 奥 の 路 面 を 別 の 平 面 領 域 と し て 検 出 し て い る . こ れ は , 白 杖 よ り も 広 範 囲 に 平 面 領 域 を 検 出 で き て い る と い え る . ま た , 取 得 し た デ プ ス デ ー タ に つ い て , 屋 内 で 取 得 し た デ プ ス デ ー タ よ り も , 欠 損 が 少 な い . こ れ は , 太 陽 に よ る 赤 外 線 の 量 が ,R200 の 照 射 よ り も 多 い た め , 安 定 す る た め だ と 考 え ら れ る . ・ 上 り 段 差 ( 屋 外 )( 図 5 左 中 ) 本 箇 所 で は , 前 方 約 2m に 約 7cm の 上 り 段 差 が 存 在 す る が , 本 手 法 を 適 用 し た と き , 段 差 手 前 の 平 面 領 域 の み を 検 出 し て い る . 段 差 奥 の 平 面 領 域 が 検 出 さ れ て い な い の は ,段 差 奥 の 路 面 が ,タ イ ル 状 と な っ て お り , 赤 外 線 が 他 の 方 向 に 反 射 し て し ま い , デ プ ス デ ー タ の 欠 損 が 多 く な っ て し ま う た め で あ る . ・ 障 害 物 ( 屋 外 )( 図 5 右 下 ) 本 箇 所 で は ,前 方 約1.5m に 障 害 物 が 存 在 す る .本 手 法 を 適 用 し た と き , 障 害 物 を 避 け て , 路 面 上 の 平 面 領 域 を 検 出 し て い る . ま た 今 回 , 約 3m と 白 杖 よ り も 広 範 囲 に 平 面 領 域 を 検 出 で き て い る . 障 害 物 の 影 と な っ て い る 部 分 は , 赤 外 線 が , 障 害 物 に 遮 ら れ て し ま う た め , デ プ ス デ ー タ が 取 得 で き ず , 欠 損 が 生 じ て し ま う . そ の た め , 平 面 領 域 と し て も 検 出 さ れ て い な い . ・ 下 り 段 差 ( 屋 内 )( 図 5 右 上 ) 本 箇 所 で は , 前 方 約2m に 約 6cm の 下 り の 段 差 が 存 在 す る が , 本 手 法 を 適 用 し た と き , 段 差 前 の 床 面 の 平 面 領 域 の み を 検 出 し て い る . 段 差 後 の 床 面 で は , 材 質 の 鏡 面 性 が 強 く ,3 次 元 点 群 の 欠 損 が 多 い こ と が 確 認 で き る . そ の た め , こ う し た 床 面 に 対 し て , 色 情 報 を 用 い て 補 間 し , 床 面 後 の 平 面 領 域 の 検 出 を 目 指 す . ・ 上 り 段 差 ( 屋 内 )( 図 5 右 中 ) 本 箇 所 で は ,前 方 約2m に 約 15cm の 上 り の 段 差 が 存 在 す る が , 本 手 法 を 適 用 し た と き , 段 差 前 の 床 面 の 平 面 領 域 の み を 検 出 し て い る . 段 差 部 分 の 鉛 直 方 向 の 平 面 領 域 は , 加 速 度 セ ン サ を 用 い た 手 法 に お い て , 検 出 さ れ て い な い . ・ 障 害 物 ( 屋 内 )( 図 5 右 下 ) 本 箇 所 で は , 前 方 に2 つ の 障 害 物 が 存 在 す る . 左 の 障 害 物 は 前 方 約 2.5m で 高 さ が 約 15cm. 右 の 障 害 物 は 前 方 約 2m で 高 さ が 約 5cm で あ る . 本 手 法 を 適 用 し た と き ,左 の 障 害 物 付 近 ま で 平 面 領 域 の 検 出 で き て お り , 白 杖 よ り も 広 範 囲 に 平 面 領 域 を 検 出 で き て い る と い え る . 左 の 障 害 物 は 平 面 と し て 認 識 し て い な い が , 右 の 障 害 物 は 床 面 と 同 じ 平 面 と し て 認 識 し て し ま っ て い る . こ れ は , 障 害 物 の 高 さ が 低 い た め で あ る .3 次 元 点 群 の 法 線 ベ ク ト ル か ら 平 面 を 検 出 す る 際 の , 閾 値 を 調 整 す る こ と で , こ の 障 害 物 も 避 け る こ と が で き る . し か し , そ れ に よ り , 平 面 で あ る 床 面 も 平 面 と し て 検 出 さ れ な く な る 可 能 性 も あ る た め , ど れ ほ ど の 大 き さ の 障 害 物 ま で を 取 り 除 く 必 要 が あ る か , 検 討 す る 必 要 が あ る .7. お わ り に
本 研 究 で は , デ プ ス カ メ ラ と 加 速 度 セ ン サ を 用 い て , 視 覚 障 が い 者 の 安 心 , 安 全 な 単 独 歩 行 支 援 の シ ス テ ム を 提 案 し た . デ プ ス カ メ ラ で 作 成 し た 3 次 元 点 群 と 加 速 度 セ ン サ と 組 み 合 わ せ る こ と で , 路 面 上 の 平 面 領 域 の み の 検 出 を 実 現 し た . 本 シ ス テ ム を 屋 内 外 の 複 数 の路 面 環 境 で 実 証 実 験 を 行 い , 本 手 法 の 有 効 性 を 確 認 し た . 今 後 の 課 題 と し て , シ ス テ ム の 高 速 化 , 検 出 し た 平 面 領 域 の 精 度 の 向 上 , そ し て 視 覚 障 が い 者 へ の フ ィ ー ド バ ッ ク の 方 法 の 検 討 が 挙 げ ら れ る .1 つ 目 に 関 し て は , 別 の 平 面 領 域 の 検 出 手 法 の 検 討 し , 実 時 間 処 理 を 目 指 す .2 つ 目 に 関 し て は , デ プ ス カ メ ラ で 取 得 し た デ プ ス デ ー タ に か け る フ ィ ル タ の 大 き さ お よ び 種 類 の 変 更 な ど を 試 み る .3 つ 目 に 関 し て は , 視 覚 障 が い 者 の 進 行 方 向 が 平 面 で な け れ ば , 音 に よ る 注 意 喚 起 を 行 う 予 定 で あ る . 本 研 究 は JST-RISTEX の 助 成 を 受 け た .
文
献
[1] 厚 生 労 働 省 ,“ 平 成 18 年 度 身 体 障 害 児・者 実 態 調 査 結 果 ”, 厚 生 労 働 省 ,2008. [2] 後 藤 伸 也 , 渡 邊 謙 太 郎 , 戸 田 英 樹 , チ ャ ビ ・ ゲ ン ツ ィ ,“ 視 覚 障 碍 者 の た め の LRF を 用 い た 障 害 物 段 差 検 出 機 能 を 持 っ た 歩 行 支 援 シ ス テ ム ”, 信 学 技 報 ,Vol.111, No.57, pp35-38, 2011 [3] H.Takizawa,S.Yamaguchi,M.Aoyagi,N.Esaki,and S.Mizuno,“ Kinect cane:an assistive system for the visually impaired based on the concept of object recognition aid”,Personal and Ubiquitous Computing, Vol19, No.5, pp995-965, 2011. [4] 速 水 正 樹 ,MichaelHild,“ 視 覚 障 害 者 の 安 全 歩 行 を 目 的 と す る ス テ レ オ 画 像 を 用 い た 階 段 の 検 知 ”, 平 成 22 年 度 情 報 処 理 学 会 関 西 支 部 支 部 大 会 講 演 論 文 集 ,VoL2010, 2010. [5] 内 藤 康 太 ,鈴 木 寿 ,“ ス テ レ オ カ メ ラ を 用 い た 視 差 情 報 に よ る 屋 内 床 面 抽 出 の 研 究 ”, 研 究 報 告 知 能 シ ス テ ム ,Vol.163, No.5, pp1-6, 2011. [6] 関 晃 仁 ,奥 富 正 敏 ,“ 道 路 面 情 報 に 基 づ く ス テ レ オ 動 画 像 を 用 い た 車 両 の 前 方 環 境 認 識 ”, 情 報 処 理 学 会 ,VoL.1, No.1, pp1-19, 2008.[7] A.Trevor, S.Gedikli, R.Rusu, and H.Christensen. “Efficient Organized Point Cloud Segmentation with Connected Components ”, In 3rd Workshop on
Semantic Perception Mapping and Exploration (SPME),2013.
[8] S.Holzer, RB.Rusu, M.Dixon, S,Gedikli, and N.Navab. “ Adaptive neighborhood selection for real-time surface normal estimation from organized point cloud data using integral images ” , In Intelligent Robots and Systems (IROS), pp 2684–2689, 2012.