救急救命センターと連携する
交通事故自動通報システムによる
交通弱者の被害軽減
― 平成 28 年度(中間報告) タカタ財団助成研究論文 ―
ISSN 2185-8950
研究代表者
中山 功一
研究実施メンバー
研究代表者
国立大学法人
佐賀大学
工学系研究科
准教授
中山
功一
研究協力者
国立大学法人
佐賀大学
医学部
教授
阪本
雄一郎
国立大学法人
佐賀大学
医学部
助教
山田クリス孝介
国立大学法人
佐賀大学
産学・地域連携機構
教授
佐藤
三郎
国立大学法人
佐賀大学
工学系研究科
客員研究員
大島
千佳
2/37
報告書概要
本プロジェクトは, スマートフォン用の Android アプリとして,事故検知/事故通報アプリを作成した.作 成したアプリは,起動中に,通常発生しない加速度(異常加速度)を検知すると,警報音 を発すると同時に事故であることを画面と音声で知らせる.画面上には,「警報停止(通 報は必要ありません)」ボタンが表示される.所持者や目撃者が自ら対処できる場合は警 報停止ボタンを押してもらうが,所持者が意識不明の場合や,目撃者が不在などにより対 処できない場合は,自動的に救急救命センターに通報される.実験の結果,上空から撮影 が可能な誤差 5 メートル以内で,正しく事故発生位置を通報できることを確認した. Microsoft Azure を用いて,通報を受けるサーバを構築した.送られてきた位置情報を 正しく記録できた.また,リクエストに応じて,ドローンの制御用タブレットに,位置情 報と出動指示のデータを渡せることを確認した. ドローンの自動飛行を制御するタブレットアプリを作成した.指定された GPS 情報に 基づき,自動的に事故現場へ救急ドローンを飛行させることができた.現場に到着したド ローンから送られてくる映像,および到着したドローンを遠隔操作して得られる映像等 の情報が,救急救命センターに設置を予定しているタブレット上で表示されることを確 認した. さらに,事故発生時にスマートフォンが故障しないか(破壊されないか)実験により検 証した.電動車いすに乗せたダミーに人形に,スマートフォンを2台装着して,自動車を 3回衝突させた.ダミー人形は,電動車いすごと跳ね飛ばされたが,6台のスマートフォ ンのすべてが壊れずに,事故通報できることを確認した.3/37
目 次
救急救命センターと連携する 交通事故自動通報システムによる交通弱者の被害軽減 第 1 章 はじめに 第 2 章 スマートフォンによる自動通報 2.1 通 常 運 転 時 の 加 速 度 2.2 事 故 発 生 時 の 加 速 度 2.3 識 別 ア ル ゴ リ ズ ム の 検 討 2.4 識 別 ア ル ゴ リ ズ ム の 作 成 2.5 メ ー ル 送 信 機 能 の 作 成 第 3 章 事故発生時の確認実験 3.1 事 故 検 知 お よ び 誤 検 知 の 確 認 3.2 事 故 発 生 時 の 破 損 状 況 の 確 認 3.3 事 故 発 生 時 の 加 速 度 デ ー タ の 確 認 3.4 ス マ ー ト フ ォ ン の GPS 精 度 の 確 認 第 4 章 ドローンによる事故現場の確認 4.1 ドローンによる確認の利点 4.2 ドローンを用いたシステムの概要 4.3 自動飛行アプリケーション 4.4 Web サ ー バ 4.5 自動飛行アプリケーション 4.6 屋外実験 4.7 ドローンの GPS 精度の確認 4.8 ドローン自動飛行実験 第 5 章 まとめと今後の課題 参考文献4/37
第 1 章
はじめに
佐賀県の人口 10 万人あたりの人身事故発生件数は,2015 年で 1025 件,2016 年で 927 件 と,5 年連続で全国ワーストであった[1][2].全国平均と比べても 2 倍以上の開きがあり,特 に歩行時や自転車運転時の被害が顕著である.その中でも佐賀市は, 図 1.1 に示す通り,全 国でトップを争っている状況である. 図 1.1 交通事故発生状況の推移 (出典:公共財団法人「交通事故センター」のデータを基に毎日新聞が集計)5/37 歩行時や自転車運転時に交通事故にあった場合,自動車の運転時と比べて重症となりやす く,自分で消防署に通報できない場合が多い.平成26 年度版 犯罪白書によると,図 1.2 に 示されるように,ひき逃げ件数は,近年減少傾向にあるが,重傷事故の件数は毎年あまり変 わりがない. 図1.2 ひき逃げ事件発生件数・検挙率の推移(平成 26 年度版 犯罪白書) この 2 つのデータから,佐賀市では,自転車事故でひき逃げによる重傷事件に巻きこま れる可能性が高いといえる.
6/37
自動車では自動通報システムの搭載が進む中,歩行者や自転車には,自動通報する手段 が限られている.「Skylock[3],図 1.2」のように防犯グッズとして,Wi-Fi または Bluetooth 接続が可能な場合に限り,異常な加速度を検知すると,自転車の所有者に通報するものは 存在する.しかし,自転車の運転者が事故にあった場合に,携帯電話の電波を経由して任 意の連絡先に通報してくれる装置は存在しない.
図1.2 Skylock
筆 者 ら の 所 属 す る 佐 賀 大 学 で は , 先 進 事 故 自 動 通 報 シ ス テ ム ( Advanced Automatic Collision Notification : AACN)とドクターヘリシステム[3]を連動させる救急ヘリ病院ネ ットワーク(HEM-Net)[4]を導入している.自動車には AACN などの通報装置が装備されつつ ある.自転車や歩行者が事故にあった場合にも,自動で救急通報され,適切に救急救命され るシステムが期待される.
7/37 本研究では,交通事故の救急システムを提案する.まず,スマートフォンを用いて,歩行 者や自転車の運転者が,自ら通報できないような事故にあった場合でも,自動で事故発生と その位置情報を通報する Android アプリケーション(以下,自動通報アプリ)を開発する. 次に,通報された位置情報に従い,小型の無人飛行機「ドローン」を事故現場まで自動飛行 させ,上空から事故の様子を動画で撮影し,救命センターに送信する Android アプリケーシ ョン(以下,自動操縦アプリ)を開発する.救命センターでは,上空からの映像を見て,救急 車やドクターヘリの出動を判断する. 筆者らが提案している交通事故救急システムを図 1.3 に示す.本システム開発に向けた予 備実験と,図 1.3 青枠で示したスマートフォンによる自動通報アプリを 2 章で,アプリの動 作確認実験を 3 章で,赤枠で示したドローンの自動操縦アプリ,およびドローンによる撮影 について 4 章で,それぞれ述べる. 図 1.3 救急システムの概念
8/37
第 2 章
スマートフォンによる自動通報
2.1 通常運転時の加速度 ま ず , 通 常 の 運 転 時 の 加 速 度 を 調 べ る 実 験 を 行 っ た . 20歳 代 の 被 験 者 4人 ( 男 性3名 , 女 性 1名 ) が , 佐 賀 駅 か ら 大 学 ま で の 片 道 20分 程 度 の 通 学 時 に , ポ ケ ッ ト ま た は バ ッ グ に 加 速 度 セ ン サ を 入 れ て , 合 計70分 間 程 度 の 加 速 度 の デ ー タ を 取 得 し た . ま た ,20歳 代 の 被 験 者 4人 ( 男 性 4名 ) が , 自 転 車 で 急 発 進 / 急 転 回 / 急 停 止 を し た 加 速 度 デ ー タ を , 合 計40分 程 度 取 得 し た . 加 速 度 を 検 知 す る セ ン サ と し て , 図2.1に 示 す ス マ ー ト フ ォ ン ( COVIA社 製 : CP-D02) を 用 い た . 図2.1 スマートフォン(COVIA 社製:CP-D02) 通 常 の 運 転 に よ る 加 速 度 デ ー タ の 一 例 を 図2.2, 急 発 進 / 急 転 回 / 急 停 止 し9/37 た 加 速 度 デ ー タ の 一 例 を 図2.3に 示 す . こ の 実 験 の 結 果 , 通 常 の 運 転 で は , 加 速 度 の 絶 対 値 (3軸 の 加 速 度 の 二 乗 和 の 平 方 根 ) が 30m/s2を 越 え る こ と が な い こ と が 明 ら か に な っ た . ま た , 加 速 度 セ ン サ を ポ ケ ッ ト ま た は バ ッ グ に 入 れ る こ と の 影 響 は な か っ た . 図 2.2 通常の自転車走行時における加速度の絶対値の推移 図 2.3 急加速,急旋回,急停止時における加速度の絶対値の推移
10/37 2.2 事故発生時の加速度 自 転 車 を 故 意 に 衝 突 さ せ る な ど を し て , 事 故 を 再 現 し た 状 況 で の 加 速 度 の デ ー タ を , 廃棄予定の中古自転車(図2.4)を用いて取 得 し た . 被 験 者 の 安 全 性 を 考 慮 し , 衝 突 さ せ る 自 転 車 に 被 験 者 は 乗 車 し な か っ た . 加 速 度 セ ン サ は , 衝 突 に よ り 破 損 し に く いWAA-010(ATR社製,図2.5)を用い,自転車のサドルに装着した. 事 故 は , { 正 面 衝 突 / 横 か ら の 衝 突 / 運 転 時 の 転 倒 / 停 止 時 の 転 倒 / 落 下 (2メ ー ト ル ) } の 5種 類 を 想 定 し , 5つ の 条 件 で デ ー タ を 取 得 し た . 図2.4 廃棄予定の実験用自転車 図2.5 WAA-010(ATR 社製)
11/37 コ ン ク リ ー ト 製 の ブ ロ ッ ク に 自 転 車 を 正 面 か ら3回 衝 突 さ せ た 場 合 の 加 速 度 デ ー タ の 一 例 を 図2.6に 示 す . 図2.6 ブロック塀への正面衝突時の加速度の絶対値の推移 さ ら に , 停 止 時 の 転 倒 を 左 右 交 互 に 行 っ た 場 合 の 加 速 度 デ ー タ の 一 例 を 図 2.7に 示 す . 図2.7 左右交互の転倒時の加速度の絶対値の推移
12/37 実 験 結 果 か ら , 正 面 衝 突 / 横 か ら の 衝 突 / 運 転 時 の 転 倒 / 停 止 時 の 転 倒 / 落 下 (2メ ー ト ル ) の い ず れ の 条 件 に お い て も , 加 速 度 の 最 大 値 は 常 に 100m/s2を 越 え る こ と が 明 ら か に な っ た . 2.3 識別アルゴリズムの検討 事 故 を 識 別 す る た め に , 重 力 加 速 度 を 削 除 し , 重 力 加 速 度 に 垂 直 な 方 向 ( す な わ ち 地 面 に 平 行 な 方 向 ) の み を 算 出 し て 判 別 に 用 い る 以 下 の ア ル ゴ リ ズ ム を 検 討 す る .
重 力 方 向 ベ ク ト ル =(a1, a2, a3)を , 過 去 2 秒 間 の 加 速 度 デ ー タ を 平 均 し た 値 と 定 義 す る . 現 在 の 加 速 度 ベ ク ト ル =(b1, b2, b3)と す る . こ の と き , ベ ク ト ル と ベ ク ト ル の な す 角 を θ と す る と , cosθ は 以 下 の 式 で 計 算 さ れ る . ここで,現在の加速度ベクトル
b
のうち,重力方向ベクトル a
に垂直な成分 c
は c
=sinθb
= 1 -cosθ2 b
となる.以上から,重力方向に垂直な加速度データが算出できる.左右交互の転倒時の加速 度データのうち,重力方向に垂直な加速度を図2.8 に,重力を含む加速度の絶対値を図 2.9 に 示す. 図2.8 重力方向に垂直な加速度13/37 図2.9 重力を含む加速度の絶対値 図 2.8 と図 2.9 との比較から,重力方向に垂直な成分のみを利用しても,事故発生時の加 速度データはほとんど変わらない.また,他の事故を想定したデータを利用した場合にも同 様の結果が得られた.このため,重力方向に垂直な加速度を抜き出すアルゴリズムを用いて, 識別性能に差が生じないと考えられる.以上から,加速度センサの値のうち,アルゴリズム がもっとも単純な加速度の絶対値による識別を用い,値が 30m/s2以上の場合に警告し, 100m/s2以上の場合に通報する通報アプリを開発した.
14/37 2.4 識別アルゴリズムの作成 前節より,加速度センサの絶対値が30m/s2以上の場合に警告し,100m/s2以上の場合に通 報するアルゴリズム,すなわち事故判別アルゴリズムを考えた.加速度センサの値を読み込 み・出力する部分を図2.10 に示す. 図2.10 加速度センサの値を読み込み・出力する部分 加速度センサの絶対値を計算するためのアルゴリズムを以下の図2.11 に示す. 図2.11 加速度センサの絶対値を計算するためのアルゴリズム
15/37 このアルゴリズムにより変数FLAG に加速度センサの絶対値が代入される.自転車の運転 手が所持するスマートフォンに警告文を表示するプログラムのソースコードを図 2.12 に示 す.このプログラムにより,事故の判定条件である,加速度センサが30 以上の時,100 以上 の時に対応する警告文を表示する. 図2.12 事故の判定条件を用いた警告文とメールの送信
16/37 変数ABC と変数 ABCDE は入っている数字で,その時の状態を示す.示す状態は 以下の3 つである. 0:変化なし 1:加速度センサの絶対値が 30 以上 2:加速度センサの絶対値が 100 以上 これらの変数を使うことで,例えば加速度センサの絶対値が30 以上の衝撃を受け, 警告メールが送られた後に,再び加速度センサの絶対値が30 以上の衝撃を受けた 時に再び警告メールが送られるのを防ぐ.
17/37 2.5 メール送信機能の作成 Androidア プ リ で メ ー ル を 送 信 さ せ る 方 法 は 2つ あ る . 1つ 目 は , intentを 使 い メ ー ラ ー を 起 動 さ せ る 方 法 で あ る . た だ し , こ の 方 法 は ユ ー ザ に 送 信 ボ タ ン を 押 し て も ら う 必 要 が あ り 、 自 動 送 信 に は な ら な い .2つ 目 は , 今 回 筆 者 が 採 用 し た 方 法 で あ るjava mailを 使 う 方 法 で あ る . こ の 方 法 で あ れ ば ユ ー ザ が 何 か 行 動 を 起 こ さ な く と も ア プ リ が メ ー ル を 自 動 送 信 す る[4]. java mail を 使 っ て メ ー ル を 送 信 す る 部 分 の ソ ー ス コ ー ド を 図 2.13に 示 す . 図2.13 メール送信機能 以 上 の よ う に , メ ー ル を 送 信 す る 為 に 必 要 なSMTPや ポ ー ト 番 号 な ど の 情 報 を こ の 部 分 の プ ロ グ ラ ム に 入 力 し て お く こ と や , メ ー ル の 送 信 元 の ア カ ウ ン ト へ の ロ グ イ ン に 必 要 な パ ス ワ ー ド を 入 力 す る こ と . メ ー ル の 送 信 先 ア ド レ ス も こ の 部 分 の プ ロ グ ラ ム に 入 力 す る こ と な ど が 必 要 と な る . メ ー ル の タ イ ト ル は , 図2.12で 表 示 す る 警 告 文 と 同 じ も の を 使 用 し , 事 故 と 判 定 さ れ た 際 の 絶 対 値 の 値 を メ ー ル の 本 文 と し て 送 信 す る . こ の プ ロ グ ラ ム に よ り , 指
18/37 定 の 条 件 で メ ー ル が 送 信 さ れ る こ と を 確 認 で き た .
第 3 章
事故発生時の確認実験
前 章 の ア ル ゴ リ ズ ム を 使 っ て , 自 転 車 の 加 速 度 が30m/s2( 通 常 の 運 転 で は 超 え な い 敷 居 値 ) を 超 え る と 警 告 メ ー ル を ,100m/s2( 事 故 の 可 能 性 が 高 い 敷 居 値 ) を 超 え る と 事 故 メ ー ル を , そ れ ぞ れ 指 定 ア ド レ ス に 自 動 的 に メ ー ル す る ア プ リ を 開 発 し た . 開 発 環 境 と し て ,Windows8.1 上 で Eclipseを 用 い た . メ ー ル の 送 信 は , java mailを 用 い , 警 告 メ ー ル / 事 故 メ ー ル の 送 信 先 は , ユ ー ザ が 任 意 で 選 べ る も の と し た . 同 時 に ,HTTP通 信 の GETメ ソ ッ ド を 用 い て , 経 度 緯 度 の 位 置 情 報 をPHPサ ー バ に 送 信 す る . サ ー バ で は , 位 置 情 報 を json形 式 で 保 存 す る . 自 動 操 縦 ア プ リ は , 受 信 用URLに ア ク セ ス す る こ と で , json形 式 の 位 置 情 報 を 受 信 で き る . 3.1 事故検知および誤検知の確認 開 発 し た 自 転 車 事 故 自 動 通 報 ア プ リ の 実 証 実 験 と し て ,20歳 代 の 被 験 者 が , 通 学 時 に 約20分 間 利 用 し た . そ の 結 果 , 強 い 衝 撃 が あ っ た こ と を 知 ら せ る メ ー ル と , 事 故 を 知 ら せ る 警 告 メ ー ル は 送 ら れ ず , 安 全 に 運 転 を し て い る こ と を 正 し く 判 定 で き る こ と が 分 か っ た . 次 に , 自 転 車 事 故 に 相 当 す る と 仮 定 さ れ る 加 速 度30m/s2程 度 の 衝 撃 を 与 え た と こ ろ , 警 告 メ ー ル が 送 信 さ れ た . 一 方 ,100m/s2を 超 え る 衝 撃 を 与 え た と こ ろ , 一 部 の ス マ ー ト フ ォ ン で , 電 源 が 落 ち て し ま い , 事 故 を 知 ら せ る 通 報 メ ー ル が 送 ら れ な い 場 合 が あ る こ と が 判 明 し た . こ の 原 因 は , ス マ ー ト フ ォ ン の ハ ー ド ウ ェ ア の 特 性 が 影 響 し て い る と 考 え ら れ , 衝 撃 に 強 い ス マ ー ト フ ォ ン を 用 い る 必 要 が あ る .19/37 3.2 事故発生時の破損状況の確認 交 通 事 故 発 生 時 に , ス マ ー ト フ ォ ン が 破 損 し , 通 信 が で き な く な る 可 能 性 も 考 え ら れ る . そ こ で , 普 通 乗 用 自 動 車 と ハ ン ド ル 型 電 動 車 イ ス ( スズキ製セ ニアカー)と の 衝 突 実 験 に よ り , 破 損 状 況 を 確 認 す る . 車 イ ス に 乗 せ た ダ ミ ー 人 形 の 腰 に 図2.1に 示 し た ス マ ー ト フ ォ ン ( COVIA社製:CP-D02) を 2 台 設 置 す る . そ こ に , 時 速30kmの 普 通 乗 用 車 を 衝 突 さ せ る . 後 部 か ら の 衝 突 ( 追 突 ) を2回 , 側 面 か ら の 衝 突 を 1回 の , 計 3回 実 験 し た . 実 験 の 様 子 を 図 3.1, 図3.2に 示 す . 図3.1 衝突実験(追突)の様子
20/37 図3.2 衝突実験(側面)の様子 3回 の 衝 突 実 験 の 結 果 , い ず れ の 場 合 も , 2台 の ス マ ー ト フ ォ ン は 衝 突 後 も 破 損 す る こ と な く , 通 信 可 能 な 状 態 で あ っ た . こ の こ と か ら , ス マ ー ト フ ォ ン を 所 持 し た 状 態 で 事 故 に あ っ て も , 多 く の 場 合 , ス マ ー ト フ ォ ン は 事 故 を 通 報 で き る 状 態 で あ る こ と が 確 認 で き た . 3.3 事故発生時の加速度データの確認 上 記 の 実 験 時 に お け る , 図2.1に 示 し た ス マ ー ト フ ォ ン に よ り 取 得 し た 加 速 度 デ ー タ と , 同 時 に 装 着 し た 図2.5に 示 し た 加 速 度 セ ン サ に よ り 取 得 し た 加 速 度 デ ー タ を 分 析 す る . まず,加速度センサについて結果を述べる.図 3.3 の赤枠部分は,衝突直後に生じた加速 度である.衝突直後の加速度は,2 つの軸に対して,約 150m/s2の加速度が生じていること がわかる.また,他の加速度センサすべてにおいて, 2 つの軸に対して強い加速度が生じた. 図3.3 市販の加速度センサの加速度データ 次 に スマートフォンで取得した加速度データについて結果を述べる.図3.4 の赤枠部分は, 衝突直後に生じた加速度である.衝突直後の加速度は,2 つの軸に対して,約 20m/s2の加速 度が生じていることがわかる.本実験で使用したスマートフォンは,端末の性能上,1 つの軸 に対して20m/s2(絶対値で約35m/s2)までの加速度しか測定できない.つまり,事故が発生 した場合,加速度の最大値を記録することがわかった.また,他のスマートフォンすべてに おいて,図3.3 と同様に 2 つの軸に対して強い衝撃が生じた.
21/37 図3.4 スマートフォンの加速度データ これらの実験結果より,衝突直後に2 つの軸に対して強い加速度を検知することがわかっ た.30km/h の車との交通事故が起きたとき,2 つの軸に 150m/s2の加速度が生じ,1 つの軸 は,加速度が生じないとする.このときに生じる加速度の絶対値は,約 210m/s2である.こ れまでに述べたように,通常運転での加速度は30m/s2を超えることはないのに対し,事故が 発生したときの加速度は30m/s2を超えることが明らかとなった.
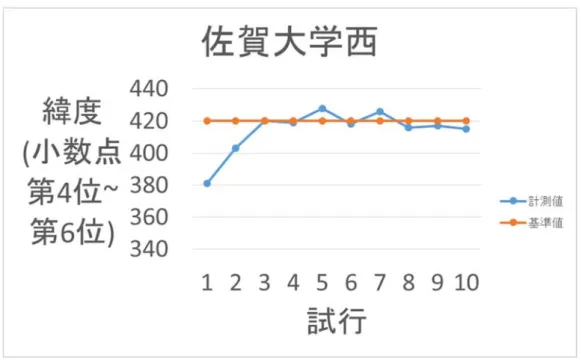
22/37 3.4 スマートフォンのGPS精度の確認 GPSの 精 度 を 確 認 す る た め , 開 発 し た ア プ リ を 用 い て , 事 故 が 起 き や す い 4ヶ 所 で GPSデ ー タ を そ れ ぞ れ 10回 ず つ 取 得 し た . 図3.5から図3.12に,指定した4 ヶ所について,緯度,経度をそれぞれ図示した.緯度・経度の表記は,小数点第4位から小数点 第6位までとしている.小数点第4位の数値が1度変わると約10m,小数点第5位の数値が1度変わ ると約1m,小数点第6位の数値が1度変わると約0.1mの誤差が生じていることになる.青色の線 は,実験により計測した値である.橙色の線は,googleマップで調べた値(基準値)である. これらの結果から,指定した4 ヶ所すべてにおいて,緯度,経度どちらの誤差も約 5m(図中の 縦軸の約50)以内に収まっていることがわかる. 図3.5 佐賀大学前での緯度 図3.6 佐賀大学前での経度
23/37
図3.7 佐賀大学西での緯度
24/37
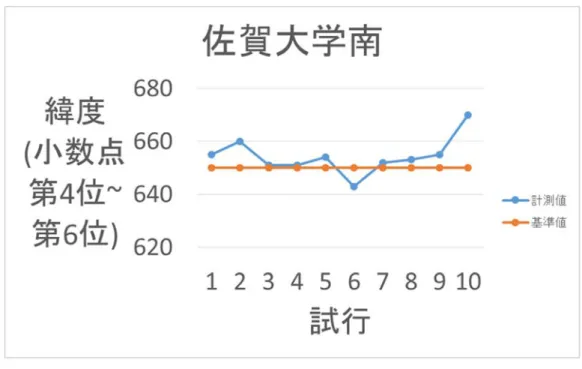
図3.9 佐賀大学南での緯度
25/37 図3.11 学生自宅付近での緯度 図3.12 学生自宅付近での経度 つまり,交通事故が起きたとき,事故現場を中心に約10m 正方の範囲にドローンを向かわせる ことができる.自動操縦アプリにより事故現場を撮影するドローンは,約20m 正方の範囲を撮影 するため,事故現場を写真内に収められる.これより,事故現場を正しく撮影できるので,事故 現場に救助隊が到着する前に現場の状況を確認できる.
26/37
第 4 章
ドローンによる事故現場の確認
4.1 ドローンによる確認の利点 交 通 事 故 が 起 き た 時 , 現 場 に 救 助 隊 が 到 着 す る ま で に ド ロ ー ン を 使 用 し , 到 着 前 に 現 場 の 状 況 を 確 認 す る 利 点 を 述 べ る . 事 故 現 場 へ 出 動 す る 前 に 状 況 が 確 認 で 来 た 場 合 , 事 故 の 規 模 の 把 握 や , 必 要 な 機 材 な ど の 判 断 が で き る . こ れ に よ り 現 場 に 到 着 後 , 救 助 に 必 要 な 機 材 が 足 り な い 状 況 を 避 け る こ と が 可 能 で あ る . ま た , 出 動 し 現 場 へ 到 着 ま で の 間 に , 現 場 の 状 況 が 確 認 で き る こ と に よ り , 現 場 で 何 が 起 こ っ て い る の か , ど う い う 処 置 が 有 効 な の か の 判 断 を 早 期 に 下 す こ と が で き る よ う に な る . こ れ に よ り , 現 場 到 着 後 の 救 助 活 動 が 迅 速 に 行 え る . 4.2 ドローンを用いたシステムの概要 本 研 究 で 用 い た ド ロ ー ン は ,DJI社 の Phantom4で あ る . 自 動 操 縦 ア プ リ の 開 発 に は ,DJI Mobile SDK for Androidお よ び Google Map APIを 利 用 し た . 救 命 セ ン タ ー ま た は 消 防 署 な ど に ド ロ ー ン と コ ン ト ロ ー ラ を 設 置 し , コ ン ト ロ ー ラ に , 自 動 飛 行 命 令 を 送 信 す る 自 動 操 縦 ア プ リ を イ ン ス ト ー ル し た タ ブ レ ッ ト を 接 続 す る .2章 で 述 べ た 事 故 の 自 動 通 報 を 受 信 し た サ ー バ は , 自 動 操 縦 ア プ リ にGPS情 報 を 送 信 す る . 自 動 操 縦 ア プ リ は , ド ロ ー ン を 事 故 現 場 ま で 自 動 飛 行 さ せ る . ド ロ ー ン は , 高 度100~ 150メ ー ト ル を 時 速 72kmで 飛 行 す る . 事 故 現 場 に 到 着 す る と , 高 度 を 下 げ た の ち , 上 空 か ら 事 故 現 場 を 撮 影 す る . 撮 影 さ れ た 映 像 は , 救 命 セ ン タ ー な ど で 確 認 す る . 開発したドロー ン自動飛行システムを図4.1に,消防と連携するシステムの概念を図4.2に示す. 図4.1 開発したドローン自動飛行システム27/37 図4.2 消防と連携するシステムの概念 本実験で使用したDJI 社の Phantom 4 の基本スペックを表 4.1 に示す. 表4.1 Phantom 4 基本スペック 最大飛行速度 72km/h 最大フライト時間 28 分 GPS 精度 ±0.1m~1.5m 最大伝送距離 3km 撮影画像解像度 4K(3000×4000px) 最大伝送距離(コントローラからの電波が届く飛行可能な距離)が 3km であり,最大飛行速度が 72km/h なので,3km 圏内であれば最大でも 3 分弱で到着可能である.
28/37 4.3 自動飛行アプリケーション 開発・デバッグ環境を表3.3 に示す.自動飛行のアプリケーションは iOS/Android のモバイル OS 向けの開発が可能である.今回は比較的開発・デバッグが容易な Android アプリケーション としての開発を行った.開発・デバッグ環境は以下のとおりである. 表4.2 アプリケーションの開発・デバッグ環境 PC 側開発環境 OS Windows10
IDE Android Studio 2.x デバッグ用端末 Nexus9
デバッグ用端末のOS バージョン Android 7.1.1
使用SDK など JDI Mobile SDK for Android Google Map API
29/37 4.4 Webサーバ 本研究ではWeb サーバは 2 つの役割を持つ. 1 つ目は事故検知・通報アプリケーションと自動飛行アプリケーションの仲介である.仲介部 分は PHP を使用して記述している.URL アクセス時に位置情報の経度・緯度を URL に付加し て送信するとサーバ上の一時保存用のファイルに書き込み,位置情報を保持する. http://dkn-location.azurewebsites.net/upload.php?Latitude=33.002 &Longitude=130.29151 上記の様に経度・緯度情報を付加して URL にアクセスすると位置情報が下記の形式で一時保存 用のファイルに書き込まれる. Latitude:33.002 ,Longitude:130.29151 位置情報を取得する場合は下記の URL にアクセスすることで,json 形式に形成された経度・緯 度情報がレスポンスとして返される. http://dkn-location.azurewebsites.net/ また,取得と同時にサーバ上の一時的に位置情報を保持していたファイルは値が入っていない状 態に初期化される.位置情報送信イメージを図4.3 に示す. 図4.3 位置情報送信イメージ
30/37 2 つ目の役割は,ドローンで撮影した画像を保存し,閲覧可能な状態にする機能である.画像を 保存する部分はPHP で記述し,閲覧部分は PHP・JavaScript・HTML・CSS を使用して記述し ている. 画像保存部分は保存用のURL に画像データを POST することで,画像保存用のディレクトリ 内にアップロード日時のディレクトリが作成され,その中にPOST した画像が保存される.閲覧 用のURL にアクセスすると PHP で画像保存用のディレクトリ内を読み込み,日付ごとのディレ クトリ一覧が表示される(図 4.4). 図4.4 画像閲覧サイト それぞれの日付のフォルダをクリックすることで,その日に撮影された画像の一覧がサムネイ ル表示される.それぞれのサムネイルをクリックすることで原寸の画像見ることができるように なっている(図 4.5). 図4.5 画像閲覧サイトサムネイル表示
31/37
4.5 自動飛行アプリケーション
自動飛行アプリケーションではDJI 社が公開している DJI Mobile SDK を使用している.複数 用意された自動飛行方法の中で今回はWaypoint 飛行を採用した. Waypoint 飛行とは飛行中に目標となる点(Waypoint)を複数設定し,それらを道標に順に辿り ながら飛行する方法である(図 4.6). 図4.6 Waypoint 飛行例 採用理由としては,Waypoint ごとに撮影などのアクションを設定できる Waypoint 飛行が, 「目的地まで飛行し,静止画の撮影を行う」という今回のシステムに適していたためである.
32/37 自動飛行を行うためにはまず,目的となる地点の位置情報を取得しなければならない.今回作 成したアプリケーションは,Web サーバから位置情報を取得するために,定期的に Web サーバ へアクセスしている.サーバ上に位置情報が保存されていれば,レスポンスとして位置情報が返 ってくるので,情報をもとに自動的にWaypoint 飛行の命令を作成し,ドローンに送信する.ス マートフォンのGPS 位置情報のズレや,ドローンが取得している現在位置の情報のズレを考慮 し,Web サーバから取得した位置情報を中心に周囲に 20m 四の正方形を描くように 4 点を移動 しながら撮影するようにしている(図 4.7) . 図4.7 実際のアプリでの Waypoint 飛行画面
33/37 撮影された画像データは,オリジナルの4K 画質でコントローラに繋がっているタブレットへ 送信・保存され,そこから自動的にWeb サーバへアップロードされる(図 4.8). 図4.8 サーバと自動飛行アプリケーション通信イメージ また,ドローンが被害者から遠すぎて画像から被害者の様子が確認できない場合がある.その ため,手動の操縦で事故現場を見るために,実際のドローンのカメラが捉えている画像をリアル タイムで閲覧できる画面を用意した(図 4.9). 図4.9 実際にカメラが捉えている映像
34/37 4.6 屋外実験 前 章 ま で に 述 べ た 自 動 通 報 ア プ リ と , 前 節 で 述 べ た 自 動 操 縦 ア プ リ , お よ び ド ロ ー ン を 組 み 合 わ せ て , 事 故 発 生 時 の 様 子 を 屋 外 で 再 現 す る 実 験 を 行 っ た . 河 川 敷 に て 被 験 者 は , 自 動 通 報 ア プ リ を イ ン ス ト ー ル し た ス マ ー ト フ ォ ン を 所 持 し た ま ま 倒 れ た . そ の 結 果 , 現 在 位 置 が サ ー バ に 送 信 さ れ た . 自 動 操 縦 ア プ リ は , ド ロ ー ン を 被 験 者 の 上 空 ま で 飛 行 さ せ ,10メ ー ト ル の 高 度 ま で 降 下 し て 写 真 を 撮 影 し , 自 動 で 離 陸 時 点 ま で 戻 る こ と が で き た . 実 験 を 行 っ た 河 川 敷 の 様 子 を 図4.10に , 撮 影 さ れ た 写 真 を 図 4.11に 示 す . 図4.10 実験を行った河川敷の様子 図4.11 ドローンが撮影した写真 GPS情 報 に 数 メ ー ト ル の 誤 差 が あ る た め , 被 験 者 の 位 置 が 写 真 の 中 央 か ら ず れ て い る が , 事 故 現 場 の 様 子 が 判 別 で き る こ と が 分 か る .
35/37 4.7 ドローンのGPS精度の確認 Phantom 4 はカタログスペック上 GPS 誤差が±0.1m~1.5m となっているが,研究にあたり, 実際はどの程度の誤差を想定しなければいけないかを判断するために検証実験を行った. Phantom 4 には離陸した地点の位置情報を記録しておき,自動でその地点へ着陸する Go Home モードが搭載されている.今回は Go Home モードを使用し,離陸地点と着陸地点の誤差を調べ ることでGPS にどの程度誤差があるのかを調べた.具体的な方法は以下のとおりである. 1. 離陸地点に印をつける 2. 印の上にドローンをセッティングする(図 4.12) 3. 離陸し高度 20mまで上昇,ランダムな方向・距離に手動操作で飛行させる 4. Go Home モードで離陸した地点へ帰還・着地させる(図 4.13) 5. 離陸地点との誤差を測定する 図4.12 離陸地点の印と離陸前のドローン
36/37 図4.13 着陸後のドローン 前述の方法で10 回測定を行った結果を表 4.1 に示す. 表4.3 実験結果 回数 1 2 3 4 5 6 7 8 9 10 誤差(m) 0.57 0.75 0.75 1.02 0.74 0.65 0.78 0.54 0.83 0.64 誤差方向 右前 左後 右 前 右 左前 右 後 右前 左後 この結果より実際にカタログ通り0.5~1.5m 程度の誤差であることがわかった.この結果から, 最大でも1.5m のズレを想定してプログラムを組まなければいけないことがわかった.
37/37 4.8 ドローン自動飛行実験 作成したアプリケーションを使い,実際にドローンを自動飛行させ,被写体が映るか実験をし た. ボタンを押すとWeb サーバに現在の位置情報を送信する Android アプリケーションを作成し た.このアプリから位置情報を Web サーバに送信する.25m ほど離れた位置から自動飛行して きたドローンが撮影した画像に被写体(この場合,位置情報を送信した後の自分)が写っているか どうかを確認する.また,位置情報の送信から画像が閲覧可能になるまでの時間も測定する. 実際に撮影できた画像から,想定通り被写体が写っていることが確認できる(図 4.14). 図4.14 実際に撮影された画像 同様の実験を 10 回行った結果.10 回全てで,1 回の飛行で撮影される 5 枚の画像のうちい ずれかに被写体が写っていることを確認できた.
第 5 章
まとめと今後の課題
本 研 究 で は , 交 通 事 故 の 救 急 シ ス テ ム を 提 案 し た . 歩 行 者 や 自 転 車 の 運 転 者 が , 自 ら 通 報 で き な い よ う な 事 故 に あ っ た 場 合 で も , 自 動 で 事 故 発 生 と そ の 位 置 情 報 を 自 動 通 報 す るAndroidア プ リ ケ ー シ ョ ン を 開 発 し た . 事 故 発 生 時 に 壊 れ る こ と な く , 事 故 発 生 位 置 を サ ー バ に 送 信 さ れ る こ と を 確 認 し た . 次 に , 通 報 さ れ た 位 置 情 報 に 従 い , ド ロ ー ン を 事 故 現 場 ま で 自 動 飛 行 さ せ , 上 空 か ら 事 故 の 様 子 を 動 画 で 撮 影 し , 救 命 セ ン タ ー に 送 信 す るAndroidア プ リ ケ ー シ ョ ン を 開 発 し た . 通 報 さ れ た 事 故 現 場 の 上 空 ま で 自 動 飛 行 し , 撮 影 さ れ た 事 故 の 様 子 を 救 命 セ ン タ ー で 確 認 で き る こ と を 明 ら か に し た . 筆 者 ら が 提 案 し て い る 交 通 事 故 救 急 シ ス テ ム は 試 験 段 階 で あ り , 実 用 化 ま で に 解 決 す べ き 課 題 は い く つ も あ る . そ の 一 つ が ,GPS情 報 に 含 ま れ る 誤 差 の 補 正 で あ る . 事 故 検 知 時 刻 の 前 後 の 一 定 期 間 で 複 数 回 のGPS情 報 を 取 得 し , ド ロ ー ン が 到 着 す る ま で に 位 置 情 報 を 補 正 す る こ と で , 正 し い 位 置 で 撮 影 で き る よ う に す る と と も に , 事 故 現 場 の 周 辺 も 含 め て 複 数 枚 の 写 真 を 自 動 的 に 撮 影 ・ 送 信 で き る よ う に す る 予 定 で あ る . も う 一 つ の 課 題 は , 航 空 法 に お け る 様 々 な 制 約 で あ る . 現 在 , ド ロ ー ン の 飛 行 に は , 操 縦 者 に よ る 有 視 界 飛 行 を 原 則 と し て い る . そ の た め , 事 故 発 生 時 に も ド ロ ー ン が 操 縦 者 か ら 見 え る 範 囲 で 飛 行 す る 必 要 が あ る . こ れ ら の 制 約 を 踏 ま え つ つ , 交 通 事 故 の 被 害 を 軽 減 に つ な が る 救 命 シ ス テ ム の 開 発 を 目 指 す . [1] 佐賀新聞 Live(2016 年 1 月 28 日付)<http://www.saga-s.co.jp/news/saga/10101/272951 > [2] 佐賀新聞 Live(2017 年 1 月 5 日付)<http://www.saga-s.co.jp/news/saga/10101/392405 > [3] 佐 賀 県 医 務 課 , 佐 賀 県 ド ク タ ー ヘ リ の 概 要 に つ い て < https://www.pref.saga.lg.jp/web/var/ rev0/0143/2475/201416144154.pdf>[4] 特定 NPO 法人救急ヘリ病院ネットワーク,HEM-Net <http://www.hemnet.jp/where/> [5] 中山功一,大島千佳,阪本雄一郎 “スマートフォンアプリによる事故の自動通報と,ド