JAIST Repository: 劣駆動移動ロボットの歩容生成理論に基づくステージの上下振動を利用した物体搬送システムの研究
47
0
0
全文
(2) 修士論文. 劣駆動移動ロボットの歩容生成理論に基づくステージの上下振動を利用した物体 搬送システムの研究. 1810177 三橋 研人. 主指導教員. 審査委員主査 審査委員 審査委員 審査委員. 浅野 文彦. 浅野 文彦 Ho Anh-Van 平石 邦彦 上原 隆平. 北陸先端科学技術大学院大学 先端科学技術研究科 (情報科学). 令和 2 年 3 月.
(3) 概要 本論文では,引き込み現象を利用し,搬送機からの外部振動によって搬送物で あるリムレスホイールの歩行速度の制御を試みる.はじめに,搬送機の振動生成 機構として直動関節を用いた簡易的な 2 自由度の搬送システムのモデルを導出す る.そして,導出したモデルを用いて搬送システムの運動生成を試み,搬送シス テムの物理パラメータを変化させ解析を行うことで運動特性を明らかにする.つ ぎに,実機への適応を考慮し,駆動源となるリムレスホイールが回転しステージ を押し上げることによって振動を生成する物体搬送システムを考案し,その搬送 システムのモデルを用いて運動解析を行う.最後に,リムレスホイールを駆動源 に用いた搬送システムの試作機を用いて,実験結果がシミュレーション結果と同 じ傾向を示すことを確認する.. 2.
(4) 目次 第1章 1.1 1.2 1.3. 序論 研究背景 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 研究目的 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 本論文の構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 1 1 2 2. 第 2 章 直動関節を用いた物体搬送システムの運動解析 3 2.1 搬送システムの仕様 . . . . . . . . . . . . . . . . . . . . . . . . . . 3 2.2 数学モデルの導出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 2.2.1 運動方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 2.2.2 衝突方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 2.3 制御入力 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 2.4 運動解析結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 2.4.1 振動搬送機の周波数を調節した場合のリムレスホイールの運動 7 2.4.2 ステージの振動周波数に対するリムレスホイールの歩行周波 数の遷移傾向 . . . . . . . . . . . . . . . . . . . . . . . . . . 11 第 3 章 リムレスホイールを駆動源に用いた物体搬送システムの運動解析 3.1 搬送システムの仕様 . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 数学モデルの導出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2.1 運動方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2.2 衝突方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3 制御入力 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4 運動解析結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4.1 振動搬送機の周波数を調節した場合の RW1 の運動 . . . . . . 3.4.2 ステージの振動周波数に対するリムレスホイールの歩行周波 数の遷移傾向 . . . . . . . . . . . . . . . . . . . . . . . . . .. 16 16 17 17 18 19 20 21 24. 第 4 章 検証実験 30 4.1 実験機概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 4.2 実験結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 第 5 章 結論 37 5.1 総括 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37. 3.
(5) 5.2. 今後の課題. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37. 謝辞. 38. 参考文献. 38.
(6) 図目次 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8. 直動関節を用いた物体搬送システムの物理モデル リムレスホイールの角速度の時間推移 . . . . . . 図 2.2 の各場合の位相平面図 . . . . . . . . . . . . 搬送システムのスティック線図 . . . . . . . . . . . Am を変化させた際の 2fs に対する fw の遷移傾向 Φ を変化させた際の 2fs に対する fw の遷移傾向 . I を変化させた際の 2fs に対する fw の遷移傾向 . . l を変化させた際の 2fs に対する fw の遷移傾向 . .. . . . . . . . .. 4 8 9 10 12 13 14 15. 3.1 3.2 3.3 3.4 3.5 3.6 3.7 3.8 3.9. リムレスホイールを駆動源に用いた物体搬送システムの物理モデル RW1 の角速度の時間推移 . . . . . . . . . . . . . . . . . . . . . . . . 図 3.2 の各場合のリムレスホイールの位相平面図 . . . . . . . . . . . 搬送システムのスティック線図 . . . . . . . . . . . . . . . . . . . . . l0 を変化させときの fs に対する fw の遷移傾向 . . . . . . . . . . . . Φ を変化させときの fs に対する fw の遷移傾向 . . . . . . . . . . . . I1 を変化させときの fs に対する fw の遷移傾向 . . . . . . . . . . . . l1 を変化させときの fs に対する fw の遷移傾向 . . . . . . . . . . . . I0 を変化させときの fs に対する fw の遷移傾向 . . . . . . . . . . . .. 17 21 22 23 25 26 27 28 29. 4.1 4.2 4.3 4.4 4.5 4.6. 振動搬送機の外観 . . . . . . . . . 搬送用リムレスホイールの外観 . RW1 の角速度の時間遷移 . . . . . RW1 の 5 歩分の位相平面図 . . . 3 [Hz] おきの搬送システムの動作 fs に対する fw の遷移傾向 . . . .. 31 32 33 34 35 36. . . . . . .. . . . . . .. . . . . . .. . . . . . .. . . . . . .. . . . . . .. . . . . . .. . . . . . .. . . . . . .. . . . . . . . .. . . . . . .. . . . . . . . .. . . . . . .. . . . . . . . .. . . . . . .. . . . . . . . .. . . . . . .. . . . . . . . .. . . . . . .. . . . . . . . .. . . . . . .. . . . . . . . .. . . . . . .. . . . . . . . .. . . . . . .. . . . . . . . .. . . . . . .. . . . . . ..
(7) 表目次 2.1. 直動関節を用いた物体搬送システムの物理・制御パラメータ . . . .. 3.1. 衝突を考慮した搬送システムの物理・制御パラメータ . . . . . . . . 20. 4.1. 構成部品 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30. 6.
(8) 第 1 章 序論 1.1. 研究背景. 劣駆動移動はシステムの自由度の数よりも少ない駆動装置で移動することがで き,従来の移動機構から軽量化,省電力化が期待される.この劣駆動移動の方法の 一つとして,ロボット内部に取り付けられた揺動質量の振動周期にロボットの移 動周期を引き込むことで移動速度を制御する手法があり,多様な形状の移動ロボッ トに適応されている.浅野らは楕円形状のロボットに揺動質量を取り付け,揺動に よってロボットが下り斜面上を摺動しながら移動できることを確認した [1]. その 後,西原らは円弧形状のロボット低摩擦路面上での前進運動を生成し,水平面で の移動を実現した [2]. 揺動質量を歩行ロボットに応用した例としては,円形,球 形の足裏を持つ歩行ロボットに対し横方向に揺動を加え,3 次元的な歩行を可能に した木林らや Y.Cau らの研究がある [3],[4].また,揺動質量を鉛直方向に振動さ せ,リムレスホイールから成る 2,4 脚ロボットの歩容生成を実現した研究 [5]-[7] などがある.そこで,本研究ではロボットに運動エネルギーを印加する揺動機構 をロボットの外部に振動搬送機として設けることにより,外部入力による歩行生 成の実現を目指す.振動搬送機から歩行ロボットの簡易モデルであるリムレスホ イールに振動を与え,リムレスホイールの歩行周波数を搬送機の振動周波数に引 き込むことでリムレスホイールの歩行速度の制御,すなわち搬送速度の制御を実 現する.先行研究として歩行ロボットが歩行する床面のダイナミクスを考慮した 研究は行われている [8],[9].しかし,床面からロボットへ入力を加える研究は今 まで行われてこなかった.そこで,本研究を行うことにより新たな劣駆動手段を 検討する. 振動を利用して物体を搬送する振動搬送システムは既知の技術であり,パーツ フィーダーや振動コンベヤ,振動エレベータなど様々な形で,食品工場,医薬品工 場,精密機器工場,材料工場など幅広い分野において活用されている.その理由と して,振動搬送機は容易な機構によって連続的な物体搬送を実現できること,単 一の機構によって物体搬送と同時に搬送物の判別や選別,整列を行うことができ, 設備の単純化や自動化に貢献することなどが挙げられる.搬送物の判別や選別を 行う手法として栗田らは楕円振動を利用した物体搬送の研究を行った [10]. Chen らは一次元的に,Frei は二次元的に小さい物体を振動によって搬送する手法の研 究を行った [11],[12].東森は単駆動マニピュレータによる三自由度平面での物体 搬送を実現し,搬送物の位置と方向を制御した [13].しかし,従来の振動搬送機は. 1.
(9) 搬送機のステージ上に乗せた物体をステージの振動によって回転,跳躍または滑 り運動をさせることによって搬送する装置であり,物体を歩行させることによっ て搬送を実現する手法については研究されてこなかった.また,搬送物のダイナ ミクスを十分に考慮しておらず,形状の大きな物体や質量の大きい物体の搬送に は不向きであった.そこで,本研究では劣駆動移動ロボットの歩行原理を応用し た振動搬送機を開発し,搬送機からの外部揺動による引き込み現象を用いてリム レスホイールの搬送実現を目指す.. 1.2. 研究目的. 本研究の目的は,搬送機の上下振動を利用したリムレスホイールの搬送をシミュ レーションおよび実機にて実現することである.従来研究において,歩行ロボット のモデルの一つであるリムレスホイールは,内部に組み込まれていた駆動源から の入力によって劣駆動歩行を実現していた.そこで,本研究ではリムレスホイール への入力として搬送機のステージの上下振動といった外部からの入力を用いるこ とにで,リムレスホイールの歩行動作を半強制的に生成することにより,リムレ スホイールの搬送を実現する.本研究は,従来の振動搬送機による搬送が困難と されてきた大型物体の搬送についての研究に貢献できると考えている.また,歩 行動作を外部から促し,生成するといった観点から,提案搬送システムを人に対 して用いることで,歩行リハビリテーション機器としての応用も期待される.. 1.3. 本論文の構成. 本論文は,本章を含め 5 つの章で構成される.まず第 2 章では,直動関節を利 用した簡易的なモデルを使用した搬送システムの数値シミュレーションを行い,搬 送機の振動によってリムレスホイールの歩行周期が引き込まれることを確認し,各 物理パラメータと引き込み範囲の関係を調べる.第 3 章では,2 章のモデルからよ り実機への適応を考慮し,搬送機内部のリムレスホイールの駆動によって振動を 生成する搬送機システムについての数値解析を行う.第 4 章では前章までの解析 結果を基に,開発した試作機を用いて実機検証を行う.最後に第 5 章で本論文の まとめと今後の課題について述べる.. 2.
(10) 第 2 章 直動関節を用いた物体搬送シ ステムの運動解析 本章では,駆動源として直動関節を用いた簡易的なモデルを使用した物体搬送 システムの運動について述べる.ここで扱う搬送システムは搬送物であるリムレ スホイールの脚先に直接,上下振動による入力を与えたものである.章の構成とし て,まず使用する搬送システムの仕様を紹介する.次に,数学モデルを導出し,制 御系設計手法について説明する.最後に,導出した数学モデルを用いて搬送システ ムの運動を解析し,搬送機の振動によるリムレスホイールの歩行への影響について 調査し,搬送機の振動周波数とリムレスホイールの歩行周波数間において引き込み 現象が生じることを確認する.なお,本研究での運動解析は数値シミュレーション によって行い,シミュレーションを行うソフトウェアには MATLAB (MathWorks 社) を使用する.. 2.1. 搬送システムの仕様. 図 2.1 に本章で扱う物体搬送システムのモデル図を示す.本モデルは駆動源と なる直動関節,ステージ,搬送物であるリムレスホイールから成る.本搬送システ ムでは,搬送機のステージ下部に取り付けられた直動関節へ制御入力 u [N] を加え ることによって,ステージを上下に振動させ,その振動によってリムレスホイー ルの搬送を実現する.図中の l [m] はリムレスホイールの脚長,m [kg] は質量,I [kg · m2 ] は慣性モーメント,α [rad] は股角度を表す.搬送機のステージは水平面 に対して Φ [rad] 傾いているものとする.このとき,リムレスホイールの脚先位置 を (x, z),水平面と垂直な方向からのリムレスホイールの支持脚の傾きを θ [rad] と おく.本モデルの数値解析を単純化するため,Φ について変換行列 R(Φ) に従い 座標変換を行う. [ ] cos Φ − sin Φ R(Φ) = (2.1) sin Φ cos Φ このときの角度,位置ベクトルおよび重力ベクトルの値は以下のようになる.. θ¯ = θ − Φ, r¯ = R(Φ)r, g¯ = R(Φ)g [ ]T ]T [ [ ]T なお,r = x z ,g = gx gz = 0 −g である. 3. (2.2).
(11) 2.2. 数学モデルの導出 運動方程式. 2.2.1. ]T とおく.なお,本モデルにお θ¯ z¯ いてリムレスホイールは x ¯ 方向に滑らないものとし,数値解析の単純化のため,一 般化座標ベクトルに x ¯ を用いない.このときの運動方程式はラグランジュ方程式 から次式となる. 本モデルの一般化座標ベクトルを q =. [. M q¨ + h = Su. (2.3). ここで,M ∈ R2×2 は慣性ベクトルであり, h ∈ R2 は中心力,コリオリ力および [ ] 重力項の合成ベクトル, S =. T. 0 1. は直動関節の制御入力ベクトルである. 式.. (2.3) の左辺の各項の詳細は ] [ ] [ 2 ¯ ¯ −mgl sin ( θ + Φ) ml − ml sin θ M= , h= ¯ ¯ −ml sin θ m m(g cos Φ − θ¯˙2 l cos θ) となる.. ZZ. l α. +. g. X X. θ. m, I (x,z) Φ u. 図 2.1: 直動関節を用いた物体搬送システムの物理モデル. 4.
(12) 2.2.2. 衝突方程式. リムレスホイールとステージとの衝突は完全非弾性衝突であり,リムレスホイー ルの脚交換は瞬時に行われるため,両脚支持期間は存在しないと仮定する.衝突 [ ]T ¯ 時の一般化座標ベクトルを qc = x としたときの物体搬送システムの衝 ¯ z¯ θ 突方程式を以下に示す.. Mc q˙c+ = Mc q˙c− + JcT λc. (2.4). Jc q˙c+ = 02×1. (2.5). なお,式中の q˙c− ,q˙c+ は衝突直前および直後の速度ベクトルを表す.JcT λc ∈ R3 は ホロノミック拘束力ベクトルである. また,Mc ∈ R3 は慣性行列であり,その詳 細は, m 0 ml cos θ¯ Mc = 0 m −ml sin θ¯ ml cos θ¯ −ml sin θ¯ ml2 + I となる.衝突時の前脚の着地点の位置 (ˆ x, zˆ) は次のように表せ, [ ] [ ] ¯ xˆ x¯ + l sin θ¯ − l sin (α − θ) = ¯ zˆ z¯ + l cos θ¯ − l cos (α − θ) 速度拘束条件は、次のように定義される. [ ] [ ] [ ] ¯ − l cos (α − θ) ¯ d xˆ 1 0 l cos θ 0 + ˙ = Jc q˙c+ = q = c ¯ dt zˆ 0 1 −l sin θ¯ − l sin (α − θ) 0 従って,ヤコビアン行列は [. Jc =. ¯ 1 0 l cos θ¯ − l cos (α − θ) ¯ 0 1 −l sin θ¯ − l sin (α − θ). (2.6). (2.7). ] (2.8). となる.このとき,未定乗数ベクトル λc は次式となる.. これにより,q˙c+ は. λc = Mc−1 JcT Xc−1 Jc , Xc := Jc Mc−1 JcT. (2.9). ) ( q˙c+ = I3 − Mc −1 JcT X −1 Jc q˙c−. (2.10). となる.また,衝突時にリムレスホイールは次式に従い,脚交換による角度の更 新を行う. [ ]. qc + = qc− +. 0 0 −α. 5. T. (2.11).
(13) 2.3. 制御入力. 搬送機の振動によってリムレスホイールの搬送速度の制御を行う.本モデルで は,制御出力を y := z¯ とおく.このときの y の時間による 2 階微分は. y¨ = S T q¨ = z¨¯ = S T M −1 (Su − h). (2.12). このとき,y − → yd (t) を達成する制御入力は. u = A−1 (v + B). (2.13). v = y¨d (t) + KD (y˙ d (t) − y) ˙ + KP (yd (t) − y). (2.14). となる.ここで,KP ,KD は PD ゲインを表し,それぞれ正定数である.A およ び B は以下のように定義される.. A = S T M −1 S, B = S T M −1 h 本モデルでは搬送機の振動によるリムレスホイールへの影響を調査するため, 簡単な制御入力として正弦波の 2 乗を用いる.目標軌道 yd (t) は. yd (t) = Am sin2 (ωt). (2.15). と表せる,ここで,Am [m] は搬送機の上下動の振幅を表し,ω [rad/s] は搬送機へ の入力の角周波数を示す.. 2.4. 運動解析結果. 前節までに述べたモデルを用いて,搬送システムの運動について数値解析を行 う.表 2.1 に数値解析に用いる物理・制御パラメータを示す.以降に示す各シミュ レーションにおいて,パラメータについて特に断りのない場合は表 2.1 の値を設定 している.また,シミュレーションの初期条件は脚交換直後の状態に角速度の初 速を与えたものとして,以下のように設定した. [ ] [ ] α −2 + Φ 3 ˙ (2.16) q(0) = , q(0) = 0 0 表 2.1: 直動関節を用いた物体搬送システムの物理・制御パラメータ. m 0.6 l 0.1 I 0.06 α π/4. kg m kg · m2 rad. Φ KD KP g Am 6. π 60. rad 100 s−1 2500 s−2 9.81 m/s2 0.01 m.
(14) 2.4.1. 振動搬送機の周波数を調節した場合のリムレスホイールの 運動. ω とおく.ここで,本シミュレーションモデ 振動搬送機の振動周波数を fs = 2π ルの目標時間軌道 (式 2.15) に sin の 2 乗波を含むため,1 周期中に 2 回の振動が生 じる.そこで,以降において振動周波数の値を 2fs [Hz] とする.また,リムレスホ イールの歩行周期は,適切な初期角速度を与えていないため,しばらく収束しな い.そのため,本稿ではステージの振動による影響を明確にするため,解析結果 としてリムレスホイールの 100 歩後の値を使用する. 図 2.2 は,搬送機の振動周波数を 2fs を 0.0,2.0,4.0 [Hz] に合わせたときの 30 歩 分の角速度の値を表している.図 2.2 (a) は 2fs = 0.0 [Hz] のときの角速度であり, つまり,斜面でリムレスホイールを歩行させたときの値である.図 2.2 (a) と (b) を比較すると,図 2.2 (b) の方は角速度の遷移が安定しておらず,不規則に変化し ている.一方で,図 2.2 (a) と (c) を比較すると図 2.2 (c) では,角速度の遷移につ いて周期的な変動が見られる. 図 2.3 に図 2.2 の 30 歩分の値を用いた位相平面図をそれぞれ示す.図 2.2 (a) はリミットサイクル歩行を示している.図 2.2 (a) と (b) を比較すると,図 2.2 (b) では搬送機の振動の影響により,1 歩ごとに全く異なる軌道を描いており,リミッ トサイクル歩行ではなくなる.図 2.2 (a) と (c) を比較すると,図 2.2 (c) では速度 方向へのばらつきが認められるが,図 2.2 (a) に比較的近い形状となる.また,図 2.2 (c) の角速度の値が全体的に低下している.搬送機の振動周波数を調節するこ とによってリムレスホイールの歩行速度を制御できることがうかがえる. 図 2.4 にそれぞれの周波数におけるスティック線図を示す.図 2.4 において,時 間遷移を図中の線の色を濃く変化させることで表している.. 7.
(15) 3.8. 3.7. 3.6. 3.5. 3.4 24. 25. 26. 27. 28. 29. 28. 29. (a) 2fs = 0.0 [Hz] 3.8 3.75 3.7 3.65 3.6 3.55 3.5 3.45 3.4 24. 25. 26. 27. (b) 2fs = 2.0 [Hz] 3.4. 3.3. 3.2. 3.1. 3 25. 26. 27. 28. 29. 30. 31. (c) 2fs = 4.0 [Hz]. 図 2.2: リムレスホイールの角速度の時間推移. 8. 32.
(16) 3.8 3.75 3.7 3.65 3.6 3.55 3.5 3.45 3.4 -0.4. -0.3. -0.2. -0.1. 0. 0.1. 0.2. 0.3. 0.4. 0.2. 0.3. 0.4. 0.2. 0.3. 0.4. (a) 2fs = 0.0 [Hz] 3.8 3.75 3.7 3.65 3.6 3.55 3.5 3.45 3.4 -0.4. -0.3. -0.2. -0.1. 0. 0.1. (b) 2fs = 2.0 [Hz] 3.4 3.35 3.3 3.25 3.2 3.15 3.1 3.05 3 -0.4. -0.3. -0.2. -0.1. 0. 0.1. (c) 2fs = 4.0 [Hz]. 図 2.3: 図 2.2 の各場合の位相平面図. 9.
(17) 0.2 0.15 0.1 0.05 0 -0.05 0. 0.1. 0.2. 0.3. 0.4. 0.5. 0.4. 0.5. 0.4. 0.5. (a) 2fs = 0.0 [Hz] 0.2 0.15 0.1 0.05 0 -0.05 0. 0.1. 0.2. 0.3. (b) 2fs = 2.0 [Hz] 0.2 0.15 0.1 0.05 0 -0.05 0. 0.1. 0.2. 0.3. (c) 2fs = 4.0 [Hz]. 図 2.4: 搬送システムのスティック線図 10.
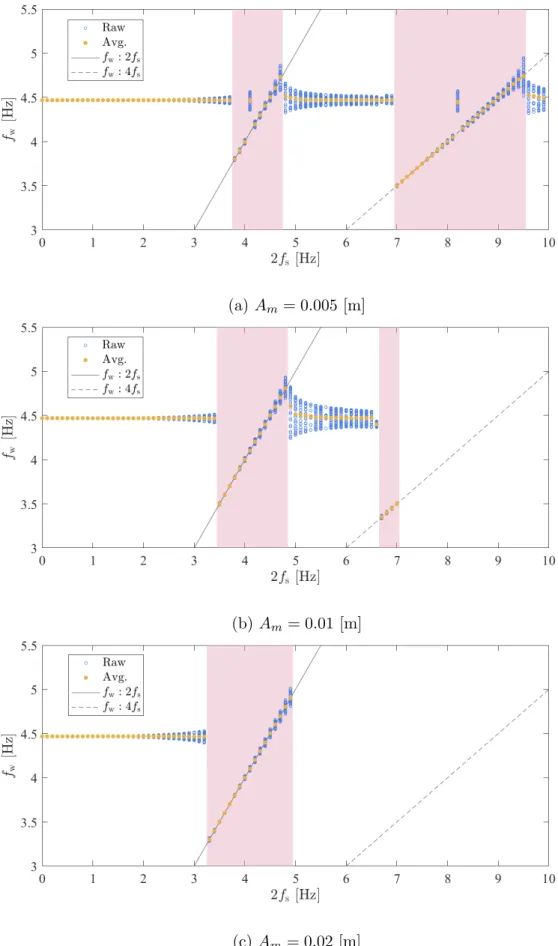
(18) 2.4.2. ステージの振動周波数に対するリムレスホイールの歩行周波 数の遷移傾向. 次の手順に従いって数値解析を行い搬送機の振動周波数 2fs に対するリムレス ホイールの歩行周波数 fw の遷移傾向を調査する.. (A1) 2fs = 0 [Hz] に設定する. (A2) リムレスホイールの初期状態を式 (2.16) に設定する. (A3) リムレスホイールを 100 歩分歩行させ,その後の 10 歩を保存する. (A4) 2fs を 0.01 [Hz] 上昇させる. (A5) (A2) から (A4) を 2fs = 10.00 [Hz] となるまで繰り返し行う. 振動搬送機のステージの上下振動の振幅が Am = 0.005,0.01,0.02 [m] のとき の解析結果を図 2.5 に示す.図 2.5 (a) より,2fs ∈ [0 3] [Hz] での低周波帯域では リムレスホイールは搬送機の振動の影響をほとんど受けない. その後,周波数を 上げるにつれ次第にリムレスホイールの歩行周波数が発散していき,リムレスホ イールの自然周波数付近で 2fs と fw が 1 : 1 の関係に収束する.その後,収束して いた歩行周波数が再び発散し,2fs : fw = 2 : 1 の関係に収束し,最終的に発散す る.これにより,搬送機の振動による引き込み現象を利用することで,リムレス ホイールの歩行速度を制御することが確認できた.また,図 2.5 (a) で見られた遷 移傾向は図 2.5 (b),(c) でも確認できた.しかし,Am の値が大きくなると,制御 入力の関係から,z 方向の加速度が大きくなり,重力加速度を超えてしまうため, リムレスホイールの跳躍が生じ.また,本研究において従来研究で示されたよう に,Am の値が大きくなるほど引き込み範囲が拡大することが確認された.. 11.
(19) (a) Am = 0.005 [m]. (b) Am = 0.01 [m]. (c) Am = 0.02 [m]. 図 2.5: Am を変化させた際の 2fs に対する fw の遷移傾向. 12.
(20) { π π} 図 2.6 に Φ = 180 , 36 [rad] とした場合の 2fs に対する fw の遷移傾向を示す. 図 2.6 (a),(b) からステージの傾きを増加すると,重力加速度の影響が大きくな り,リムレスホイールの自然周波数が変化するため,引き込み現象が生じる周波 数が異なる.そのため,傾きが緩やかなときに,2fs : fw = 2 : 1 の引き込み現象 が広い範囲で見られた.. (a) Φ =. π 180. [rad]. (b) Φ =. π 36. [rad]. 図 2.6: Φ を変化させた際の 2fs に対する fw の遷移傾向. 13.
(21) 図 2.7 に I = {0.03, 0.12} [kg · m2 ] とした場合の 2fs に対する fw の遷移傾向の 図を示す.図 2.7 (a),(b) より,リムレスホイールの慣性モーメントを増加すると, 引き込み現象が生じた際の fw の分散が増加することがわかる.これは慣性モーメ ント増加することによって,リムレスホイールとステージの衝突の影響が強くな り,衝突のタイミングによってリムレスホイールの角速度が変化するためである.. (a) I = 0.03 [kg · m2 ]. (b) I = 0.12 [kg · m2 ]. 図 2.7: I を変化させた際の 2fs に対する fw の遷移傾向. 14.
(22) 図 2.8 に l = {0.08, 0.12} [m] とした場合の 2fs に対する fw の遷移傾向の図を示 す.図 2.8(a),(b) を比較すると,脚長を変更するとリムレスホイールの自然歩行 周波数が変わるため,引き込み範囲が変化することがわかる.この際,l が短いほ うが引き込み現象が広い範囲で生じることがわかる.一方で脚長が長くなると引 き込み時に生じる fw 方向の分散が減少する.. (a) l = 0.08 [m]. (b) l = 0.12 [m]. 図 2.8: l を変化させた際の 2fs に対する fw の遷移傾向. 15.
(23) 第 3 章 リムレスホイールを駆動源に 用いた物体搬送システムの運 動解析 本章では,搬送機の振動の駆動源としてリムレスホイールを用いた物体搬送シ ステムの運動について示す.まず,本章で用いる搬送システムの仕様を紹介する. 次に,提案搬送システムについて数学モデルを導出し,制御系設計手法について 説明する.最後に,導出した数学モデルを用いて搬送システムの運動解析を行い, 引き込み現象が生じることを確認する.また,前章のモデルと比較し,その違い についても説明する.. 3.1. 搬送システムの仕様. 図 3.1 に本章で扱う物体搬送システムのモデルを示す.本モデルは搬送機の駆 動源となるリムレスホイール,上下に振動するステージ,搬送物であるリムレス ホイールから成る.ここで,駆動源のリムレスホイールを RW0 ,搬送物のリムレ スホイールを RW1 と定義する.本モデルでは,制御入力 u [N·m] をステージの下 部の RW0 に印加することによって回転させ,RW0 の脚先がステージと衝突し,ス テージを押し上げることでステージが上下に振動する.このステージの振動周期 にステージ上の RW1 の歩行周期を引き込むことにより,RW1 の搬送速度の制御を 実現する.このとき,RW0 の脚長を l0 [m],質量を m0 [kg],慣性モーメントを I0 [kg · m2 ],股角度を α0 [rad],RW1 の脚長を l1 [m],質量を m1 [kg],慣性モーメン トを I1 [kg · m2 ],股角度を α1 [rad] と表す.また,搬送機のステージの水平面か らの傾きを Φ [rad] と表す.ここで,前章と同様に数値解析を単純化するため,ス テージの傾きの角度 Φ について,変換行列 R(Φ) に従い座標変換を行う. [ ] cos Φ − sin Φ R(Φ) = (3.1) sin Φ cos Φ このときの角度,位置および重力ベクトルを以下に示す.. θ¯ = θ − Φ, r¯1 = R(Φ)r1 , r¯s = R(Φ)rs , g¯ = R(Φ)g 16. (3.2).
(24) なお,各ベクトルの詳細は [ ] [ ] [ ] [ ] [ ] θ0 x1 xs gx 0 θ= , r1 = , rs = , g= = θ1 z1 zs gz −g である.. 3.2 3.2.1. 数学モデルの導出 運動方程式 [. 一般化座標ベクトルを q =. ]T. θ¯0 z¯s z¯1 θ¯1. とするとき,搬送システムの運. 動方程式は. M q¨ + h = Su + J T λ. (3.3). 4 と表せる.式 3.3 中の M ∈ R4×4 は慣性行列であり, [ h ∈ R は中心力・コリオリ ]. 力および重力項の合力ベクトルである.また,S =. T. 1 0 0 0. は制御入力ベ. l1 α1 ZZ X. O. g. m1, I1 θ1. X. ms. + (x1, z1). (xs, zs). θ0 Φ l0. m0, I0. u. α0. 図 3.1: リムレスホイールを駆動源に用いた物体搬送システムの物理モデル. 17.
(25) クトルである.ここでの左辺の各項の詳細は 0 I0 0 0 0 0 m gms cos Φ 0 0 s M = , h = ¯ m1 (g cos Φ − θ¯˙12 l1 cos θ¯1 ) 0 0 m1 −m1 l1 sin θ1 0 0 −m1 l1 sin θ¯1 I1 + m1 l12 −m1 gl1 sin (θ¯1 + Φ). . となる.また,式 3.3 右辺の J T λ ∈ R4 はホロノミック拘束力ベクトルであり,本 モデルの拘束条件を以下に示す.. • RW0 は中心位置で回転関節に接続されている. • RW1 の支持脚先端とステージは常に接している. このときの拘束条件式は次式で示せ,. J q˙ = 02×1 式 3.4 中のヤコビアン行列は次のように表せる. [ ] l0 sin θ0 1 0 0 J= 0 1 −1 0. (3.4). (3.5). 式 3.3 と式 3.4 から未定乗数ベクトル λ ∈ R2 は以下のように求まる.. ˙ X := JM −1 J T λ = −X −1 (JM −1 (Su − h) + J˙ q),. 3.2.2. (3.6). 衝突方程式. 各リムレスホイールとステージとの衝突は完全非弾性衝突であり,両リムレス ホイールの脚交換は瞬時に行われるため両脚支持期間は存在しないと仮定する.衝 [ ]T 突時の一般化座標ベクトルを qc = θ¯0 z¯s x としたときの物体搬送 ¯1 z¯1 θ¯1 システムの衝突方程式と,衝突時の拘束条件式を以下に示す. + Mc q˙ci = Mc q˙c− + JciT λci + Jci q˙ci. = 03×1. (3.7) (3.8). − + ここで下付き文字 i ∈ {0, 1} は RWi に対応している.また,式中の q˙ci ,q˙ci は衝 5×5 突直前および衝突直後の速度ベクトルを表す.Mc ∈ R は慣性行列であり,そ の詳細は, I0 0 0 0 0 0 m 0 0 0 s Mc = 0 0 m1 0 m1 l1 cos θ¯1 0 0 0 m1 −m1 l1 sin θ¯1 0 0 m1 l1 cos θ¯1 −m1 l1 sin θ¯1 I1 + m1 l12. 18.
(26) である. 本モデルにおける衝突は RW0 がステージに衝突する場合と RW1 がステージに 衝突する場合の 2 種類が考えられ,衝突時の条件は以下のようになる.. • RW0 は中心位置で回転関節に接続されている. ¯ 方向に滑らず,常にステージに接している. • RW1 の支持脚の脚先は X • RW1 の支持脚の脚先は Z¯ 方向に跳ねることなく,常にステージに接している. このとき,RW0 がステージに衝突する場合のヤコビアン行列 Jc0 は l0 sin ( α20 − θ¯0 ) −1 0 0 0 Jc0 = 0 0 1 0 0 0 1 0 −1 0. RW1 がステージに衝突する場合のヤコビアン行列 Jc1 は l0 sin(θ¯0 ) 1 0 0 0 Jc1 = 0 0 1 0 l1 cos θ¯1 − cos(α1 − θ¯1 ) 0 1 0 −1 −l1 sin θ¯1 − sin(α1 − θ¯1 ). (3.9). (3.10). となる.各条件での未定乗数ベクトル λci は次式となる.. λci = Mc−1 JciT Xci−1 Jci , Xci := Jci Mc−1 JciT. (3.11). + − q˙ci = (I5 − Mc−1 JciT Xci Jci )q˙ci. (3.12). + よって q˙ci は. と求まる.また,衝突時にそれぞれの RW において次式に従い脚交換による角度 の更新を行う. [ ]T − qc0 + = qc0 + −α0 0 0 0 0 (3.13) [ ]T − qc1 + = qc1 + 0 0 0 0 −α1 (3.14). 3.3. 制御入力. 本モデルの制御出力を y := θ¯0 とおいたとき,y の時間に対する 2 階微分は. y¨ = S T q¨ = θ¨¯0 = S T M −1 (Su − h + J T λ). (3.15). このとき,y − → yd (t) を達成する制御入力は次式で決定できる.. u = A−1 (v + B). (3.16). v = y¨d (t) + KD (y˙ d (t) − y) ˙ + KP (yd (t) − y). (3.17). 19.
(27) ここで,KP ,KD は PD ゲインを表す.このとき,A および B は以下のようにお いた.. ˙ A := S T M −1 Y S, B := S T M −1 (Y h + J T X −1 J˙ q) Y = I4 − J T X −1 JM −1 よって,目標軌道 yd (t) は. yd (t) = ω(t − tc0 [n]) −. α0 (n ∈ Z+ 0) 2. (3.18). となる.式中の ω は RW0 の目標角速度であり,tc0 [n] は RW0 とステージの n 回目 の衝突のタイミングを表し,tc0 [0] = 0 [s] とする.. 3.4. 運動解析結果. 前節までに述べた物理モデルを用いて,RW0 の衝突を含む搬送システムの運動 について数値シミュレーションを行う.シミュレーションに用いる物理・制御パラ メータは表 3.1 に示す.以降に示す各シミュレーションにおいて,パラメータの値 を特筆しない場合は表 3.1 の値を使用する.また,シミュレーションの初期条件は RW0 ,RW1 共に,脚交換直後の状態に角速度の初速を与えたものとして,次式の ように設定した.. [. − α20 l0 cos (− α20 ) l0 cos (− α20 ) − α21 ]T [ ˙ q(0) = ω ωl0 sin( α20 ) ωl0 sin( α20 ) 3. ]T. q(0) =. (3.19). ここで,RW1 の運動は,適切な初期角速度を与えていないためしばらく収束しな い.そのため,ステージからの振動の影響を明確にするため,シミュレーション 結果として RW1 の 150 歩後の値を使用している.以下において,ステージの振動 表 3.1: 衝突を考慮した搬送システムの物理・制御パラメータ. m0 l0 I0 α0 ms g Φ. 1.5 kg 0.15 m 0.15 kg · m2 π/4 rad 6.0 kg 9.81 m/s2 π rad 60. m1 l1 I1 α1 KD KP. 20. 0.6 kg 0.1 m 0.06 kg · m2 π/4 rad 100 s−1 2500 s−2.
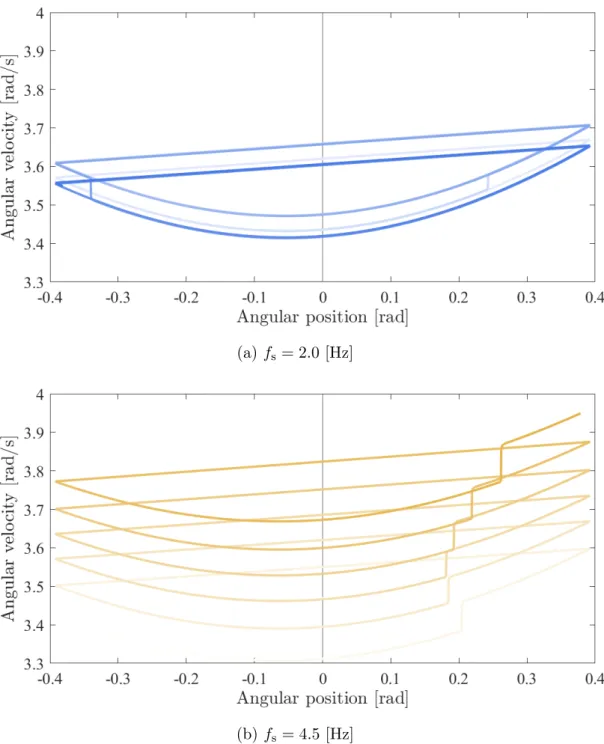
(28) 周波数および RW1 の歩行周波数をそれぞれ fs , fw [Hz] と表し,次式のように設 定した. ω 1 fs = , f w = (n ∈ Z+ ) (3.20) α1 tc1 [n] − tc1 [n − 1] なお,式中の tc1 [n] は n 回目の RW1 の衝突を示しており,tc1 [0] = 0 である.. 3.4.1. 振動搬送機の周波数を調節した場合の RW1 の運動. 搬送機の振動周波数 fs を 2.0,4.5 [Hz] に合わせたときの 30 歩分の角速度の値を 図 3.2 に示す. 図 3.2 のときの RW1 の 6 歩分の位相平面図を図 3.3 にそれぞれ示す.なお,図 3.3 において,線の色を濃くしていくことによって時間遷移を表している.これら の図において,RW1 の角速度の値が急速に変化しているのは,RW0 の衝突による 影響である.RW0 の衝突時,RW1 は RW0 からのトルク τc1 によって,運動エネル ギーが変化し,角速度が変化する.この τc1 は次式で表される.. τc1 = Fc l1 sin θ¯1. (3.21). ここで,Fc は RW0 の衝突によって生じる力であり,正の値をとる.θ¯1 < 0 のと き RW0 の衝突が生じた場合,τc1 の値は負となり,RW1 の運動エネルギーは減少 し,RW1 の角速度が減少する.一方で,θ¯1 > 0 のとき τc1 の値は正となり,RW1 の運動エネルギーは増加し,RW1 の角速度が上昇する.. 4.2 4 3.8 3.6 3.4 3.2 35. 36. 37. 38. 図 3.2: RW1 の角速度の時間推移. 21. 39. 40.
(29) (a) fs = 2.0 [Hz]. (b) fs = 4.5 [Hz]. 図 3.3: 図 3.2 の各場合のリムレスホイールの位相平面図. 22.
(30) 図 3.4 に fs を 2.0,4.5 [Hz] に合わせたときの搬送システムのスティック線図を 示す.図 3.4 においても,図 3.3 同様に,図の色を濃淡によって時間遷移を示して いる.. 0.35 0.3 0.25 0.2 0.15 0.1 0.05 0. -0.1. 0. 0.1. 0.2. 0.3. 0.4. 0.5. 0.3. 0.4. 0.5. (a) fs = 2.0 [Hz]. 0.35 0.3 0.25 0.2 0.15 0.1 0.05 0. -0.1. 0. 0.1. 0.2. (b) fs = 4.5 [Hz]. 図 3.4: 搬送システムのスティック線図. 23.
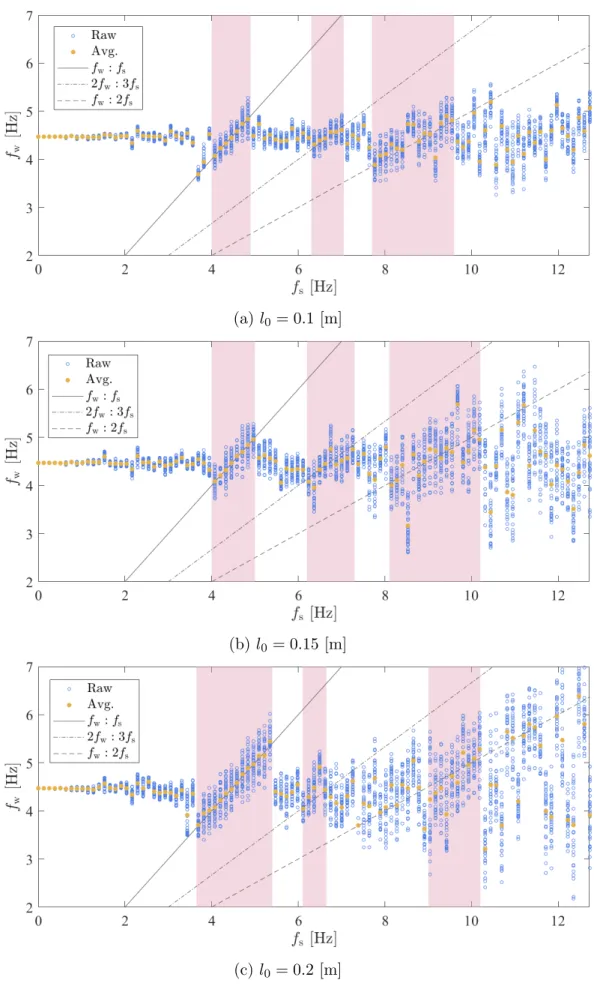
(31) 3.4.2. ステージの振動周波数に対するリムレスホイールの歩行周波 数の遷移傾向. 振動搬送機とリムレスホイールの周波数の関係を表し,引き込み現象を確認す るため,以下の手順で数値解析シミュレーションを行う.. (B1) ω = 0 [rad/s] とおく. (B2) 初期状態を式 (3.19) とする. (B3) RW1 を 150 歩分歩行させ,その後の 30 歩を保存する. (B4) ω [rad/s] を 0.1 [rad/s] 上昇させる. (B5) 手順 (B2) から (B4) を ω = 10 [rad/s] となるまで繰り返し続ける. 図 3.5 に RW0 の脚長 L0 を 0.1,0.15,0.2 [m] の 3 つの値に変化させたときの fs に対する fs の遷移傾向について示す.図中の Avg. は fw の値の平均値を示して いる.また,前章同様に,図内の fw : fs は fw と fs の関係が 1 : 1 であることを表 す.図 3.5 から RW0 の衝突を考慮したモデルであっても,ステージの振動と RW1 間で引き込み現象が生じることがわかる.加えて,図 3.5 より,1 : 1 および 1 : 2 の引き込み以外に,2 : 3 の引き込みが確認できる.しかし,前述のように RW0 と ステージの衝突によって τc1 が生じるため,2 章で示した結果のような収束した引 き込み現象は見られず,各周波数において fw の値が分散している.さらに,RW0 の脚長を増加させ,振動搬送機の振幅の値を大きくしたとき,前章の結果と同様 に 1 : 1 の範囲における引き込み範囲が増加することが確認できた.. 24.
(32) (a) l0 = 0.1 [m]. (b) l0 = 0.15 [m]. (c) l0 = 0.2 [m]. 図 3.5: l0 を変化させときの fs に対する fw の遷移傾向. 25.
(33) 図 3.6 にステージの傾き Φ を変更したときの解析結果を示す.図 3.6 より,前 ¯ 方向への重力加速度の影響が増大するた 章の結果同様に Φ の値が上昇すると,X め自然歩行周波数の値が増加する.また,Φ の値を上昇させると,引き込み範囲 が増加することが示された.. (a) Φ =. π 180. [rad]. (b) Φ =. π 36. [rad]. 図 3.6: Φ を変化させときの fs に対する fw の遷移傾向. 26.
(34) 図 3.7 に RW1 の慣性モーメント I1 を変更したときの解析結果を示す.図 3.7 か ら I1 の値が小さいほど fs : fw での引き込み範囲が広くなることがわかる.一方で, 図 3.7 から I1 の値が高くなると,fw の分散は減少し,fs : 2fw の範囲での引き込 み現象が生じることが示された.. (a) I1 = 0.03 [kg · m2 ]. (b) I1 = 0.12 [kg · m2 ]. 図 3.7: I1 を変化させときの fs に対する fw の遷移傾向. 27.
(35) 図 3.8 に RW1 の脚長 l1 の変化に対する振動搬送機とリムレスホイールの周波数 の関係を示す.図より,本モデルにおいても,l1 を変化した場合についても引き 込み現象が生じることが確認できた.同一の fs において脚長が異なるリムレスホ イールの fw がそれぞれ引き込まれた場合,脚長の差により歩行速度が変化するた め搬送物の判別や分別への応用が期待できる.. (a) l1 = 0.08 [m]. (b) l1 = 0.12 [m]. 図 3.8: l1 を変化させときの fs に対する fw の遷移傾向. 28.
(36) 図 3.9 に RW0 の慣性モーメント I0 の変化に対する振動搬送機とリムレスホイー ルの周波数の関係を示す.図より,I0 の値が小さいほど,衝突の影響を抑えるこ とができるため,引き込み時の fw の分散が大きくなっている.一方,引き込み範 囲については I0 の値が高いほど広くなることがわかる.. (a) I0 = 0.0075 [kg · m2 ]. (b) I0 = 0.03 [kg · m2 ]. 図 3.9: I0 を変化させときの fs に対する fw の遷移傾向. 29.
(37) 第 4 章 検証実験 前章までにシミュレーションを行ってきた搬送システムについて,開発した試 作機を用いて検証実験を行う.. 4.1. 実験機概要. 図 4.1 に本実験で使用する試作機の外観を示し,図 4.2 に搬送用リムレスホイー ルの外観を示す.本搬送機は,前章にてモデリングを行った搬送機の条件を基に 一部設計したものである.そのため,図 4.1 内で中央部に取り付けられた銀色の リムレスホイールが前章の RW0 ,図 4.2 に示した緑色のリムレスホイールが RW1 にあたり,本章においてもその略語表記を使用する.本実験機では,RW0 の回転 中心が EC(Electronically commutated)モータに繋がっており,EC モータを角 速度制御することによって RW0 を制御している.また,ステージには帯状のゴム シートが敷いてあり,このゴムシートを DC モータによって巻き取ることでトレッ ドミルの機能を果たし,ステージ上で RW1 を歩行させることができる.図 4.2 に 示すように,RW1 には 6 軸センサが搭載されており,これにより RW1 の角速度 データと加速度データを取得し,それらの値からカルマンフィルタを用いること によって RW1 の絶対角度を推定する.実験に使用した搬送システムの主な構成要 素を表 4.1 に示す. 表 4.1: 構成部品 EC motor Digital position controller Single board computer Sensor DC motor Single board microcontroller. 30. EC 90 flat EPOS2 P 24/5 Raspberry pi zero MPU6050 TG-85R-SU Arduino Uno.
(38) 図 4.1: 振動搬送機の外観. 31.
(39) 図 4.2: 搬送用リムレスホイールの外観. 32.
(40) 実験結果. 4.2. 図 4.3 (a),(b) に fs を 2.05,3.00 [Hz] とした際の 20 歩分の RW1 の角速度をそ れぞれに示す. 図中の青色の線はセンサによって取得した角速度の実測値であり, 黄色の線は実測値から移動平均を計算して平滑化した値である.これらにおける fw の平均値はそれぞれ 3.20,3.22 [Hz] となり,数値解析と同様に fs を調節するこ とによって fw が変化することが確認できる.. 5 4 3 2 1 0 101. 102. 103. 104. 105. 106. 105. 106. 107. (a) fs = 2.05 [Hz] 5 4 3 2 1 0 101. 102. 103. 104. (b) fs = 3.00 [Hz]. 図 4.3: RW1 の角速度の時間遷移. 33. 107.
(41) 図 4.4 に図 4.3 の平滑化した値を使用した 5 歩分の位相平面図をそれぞれ示す. 図 4.4 中では,線の色を濃くしていくことによって時間遷移を表している.また, 位相平面図において一歩分の股角度が異なる原因はカルマンフィルタを用いて角 度を推定した際の誤差によるものである.図 4.4 より,前章の数値解析結果と同様 に fs の値が大きい場合はステージの振動の影響を強く受け,RW1 の角速度が大き く変化することがわかる.. 3.5. 3. 2.5. 2 -0.4. -0.3. -0.2. -0.1. 0. 0.1. 0.2. 0.3. 0.4. 0.1. 0.2. 0.3. 0.4. (a) fs = 2.05 [Hz]. 3.5. 3. 2.5. 2 -0.4. -0.3. -0.2. -0.1. 0. (b) fs = 3.00 [Hz]. 図 4.4: RW1 の 5 歩分の位相平面図. 34.
(42) 図 4.5 に時間遷移における搬送システムの動作を示す.図 4.5 では 3 [Hz] 毎の 搬送システムの輪郭を抽出し,その色を白から赤へ変化させることで動作の時間 遷移を示す.. (a) fs = 2.05 [Hz]. (b) fs = 3.00 [Hz]. 図 4.5: 3 [Hz] おきの搬送システムの動作. 35.
(43) 図 4.6 (a) に,シミュレーションのパラメータを実験機のパラメータに合わせる ため表 3.1 の値から,I1 を調整し,その値を 0.0042 [kg · m2 ] とした際の n ∈ [31 60] にあたる解析結果を示す.図 4.6 (b) に,実験において fs ∈ [1.7 3.0] [Hz] で 20 歩 分の歩行周波数をプロットしたものを示す.なお,図 4.6 (b) において fs の刻み幅 が一定でないのは EC モータの追従誤差によるものである.図 4.6 (a),(b) から実 験結果は数値解析と同様の傾向を示しており,実験機においても fw : fs の引き込 み現象が生じることが確認された.. (a) シミュレーション結果. (b) 実験結果. 図 4.6: fs に対する fw の遷移傾向. 36.
(44) 第 5 章 結論 5.1. 総括. 本研究では,搬送機の振動による引き込み現象を利用したリムレスホイールの 歩行速度の制御を数値解析と実機実験を行い検証した.また,シミュレーション において各パラメータの変更し,搬送制御への影響を調査した.以下にこれまで の成果や明らかになった知見をまとめる.. • 直動関節を利用した振動搬送システムについてその仕様を決定し,数学モデ ルを導出した. • 当該搬送システムの運動生成に関するシミュレーションを行い,各パラメー タ変更における振動周波数に対するリムレスホイールの歩行周波数の遷移傾 向について確認した. • 駆動源にリムレスホイールを用いた振動搬送システムについてその仕様を決 定し,数学モデルを導出した. • 搬送システムの運動生成に関するシミュレーションを行い,各パラメータ変 更における振動周波数に対するリムレスホイールの歩行周波数の遷移傾向に ついて確認し,前モデルとの比較を行った. • 提案搬送システムの仕様を満たす試作機を開発した. • 試作機を用いて検証実験を行い,実験結果がシミュレーション結果と似た傾 向を示すことを確認した.. 5.2. 今後の課題. 今回の実験においては使用したモータのトルク不足により,一部の範囲のみの 実験となってしまった.そこで,今後は実験機に改良を加え,より幅広い範囲の 振動周波数での実機検証を行う必要がある.また,本搬送システムの実用化へ向 けて RW1 の歩容を安定化させる制御方法を考案する必要がある.加えて,現在は 1 つのリムレスホイールの搬送制御に留まっているため,複数台のリムレスホイー ルの制御を実現することが,搬送機としての有用性を示すためには重要である.. 37.
(45) 謝辞 本研究を進めるにあたり,常に熱心なご指導をして下さり,的確な助言をして 下さいました浅野文彦先生には心より感謝いたします.研究内容や研究方針につ いて相談に乗っていただき,様々なご助言を下さいました上原隆平先生,平石邦 彦先生,Ho Anh-Van 先生に心より感謝いたします.卒業後も研究指導や論文添削 をして頂いた李龍川氏,実験機の開発からシミュレーションに至るまで数多くの ことを懇切丁寧にご指導いただいた西原正継氏をはじめとする浅野研究室の学生 の皆様に深く感謝します.最後に,学生生活を支えて下さいました家族にも深く 感謝します.. 38.
(46) 参考文献 [1] Fumihiko Asano, Taiki Seino, Isao Tokuda and Yuji Harata, “A novel locomotion robot that slides and rotates on slippery downhill,” Proc. of the IEEE Int. Conf. on Advanced Intelligent Mechatronics, pp. 425–430, 2016. [2] Masatsugu Numis, Taiki Seino and Fumihiko Asano, “Motion analysis of underactuated locomotion robot with quick return linkages on slippery level surface,” Proc. of the IEEE Int. Conf. on Advanced Intelligent Mechatronics, pp. 1663–1668, 2017. [3] 木林 傑,杉本 靖博,石川 将人,大須賀 公一,山海 嘉之,“揺動による 4 脚準 受動的動歩行の実現と非ホロノミックモデルに基づく運動解析”,日本ロボッ ト学会誌,Vol. 31,No. 8,pp.730–738,2013. [4] Ying Cao, Soichiro Suzuki and Yohei Hoshino, “Gait stabilization of a quasipassive walker based on energy balance by utilizing a mechanical oscillator,” Proc. of Int. Conf. on Asian Control Conference, pp. 1–6, 2015. [5] Fumihiko Asano and Isao Tokuda, “Indirectly controlled limit cycle walking of combined rimless wheel based on entrainment to active wobbling motion,” Int. J. of Multibody System Dynamics, Vol. 34, Issue. 2, pp. 191–210, 2015. [6] Yuta Hanazawa, “Development of rimless wheel with controlled wobbling mass,” Proc. of the IEEE Int. Conf. on Intelligent Robots and Systems, pp. 4333–4339, 2018. [7] Longchuan Li, Isao Tokuda and Fumihiko Asano, “Optimal input waveform for an indirectly controlled limit cycle walker,” Proc. of the IEEE Int. Conf. on Intelligent Robots and Systems, pp. 7454–7459, 2018. [8] 浅野 文彦,中村 亮介,呉 銘陽,清野 大樹,鄭 彦秋,“劣駆動リムレスホ イールの陥穽踏破能力の解析を目的としたモデリングと歩行制御”,ロボティ クス・メカトロニクス講演会 2016 講演論文集,pp. 2P1-08a6(1)–2P1-08a6(4), 2016.. 39.
(47) [9] 浅野 文彦,李 程,中村 亮介,“床面のダイナミクスを考慮した劣駆動リムレ スホイールの陥穽踏破モデル構築と運動解析”,第 17 回計測自動制御学会シ ステムインテグレーション部門講演会論文集,1C1-4,pp. 0161-0165,2016. [10] 栗田 裕,松村 雄一,梅塚 沙百理,中川 淳一,“楕円振動を利用した分別搬 送 (垂直振動が跳躍限界以下の場合)”,日本機械学会論文集 (C 編),Vol. 74, No. 743,pp. 1710–1717,2008. [11] Huazhi Chen, Shengyuan Jiang, Yi Shen, WeiWei Zhang and Peng Li, “A Simulation study on conveying characteristics of particles on a vibrating plate with zigzag morphology,” Proc. of the Int. Conf. on Information and Automotion, pp. 468–473, 2016. [12] Peter U. Frei, “An intelligent vibratory conveyor for the individual object transportation in two dimensions,” Proc. of the IEEE Int. Conf. on Intelligent Robots and Systems, pp. 1832–1837, 2002. [13] Mitsuru Higashimori, “Single-actuator-based three-DoF planar manipulation via a viscoelastic and nonparallel hybrid joint mechanism,” Int. J. of Transactions on Robotics, Vol. 35, No. 3, pp. 602–617, 2019.. 40.
(48)
図
![図 2.6 に Φ = { π 180 , 36π } [rad] とした場合の 2f s に対する f w の遷移傾向を示す. 図 2.6 (a) , (b) からステージの傾きを増加すると,重力加速度の影響が大きくな り,リムレスホイールの自然周波数が変化するため,引き込み現象が生じる周波 数が異なる.そのため,傾きが緩やかなときに, 2f s : f w = 2 : 1 の引き込み現象 が広い範囲で見られた. (a) Φ = 180π [rad] (b) Φ = 36π [rad] 図 2.6: Φ](https://thumb-ap.123doks.com/thumbv2/123deta/6156903.1082542/20.892.149.727.403.1064/に対するステージ大きくリムレスホイール引き込み生じる引き込み.webp)
![図 2.7 に I = { 0.03, 0.12 } [kg · m 2 ] とした場合の 2f s に対する f w の遷移傾向の 図を示す.図 2.7 (a) , (b) より,リムレスホイールの慣性モーメントを増加すると, 引き込み現象が生じた際の f w の分散が増加することがわかる.これは慣性モーメ ント増加することによって,リムレスホイールとステージの衝突の影響が強くな り,衝突のタイミングによってリムレスホイールの角速度が変化するためである. (a) I = 0.03 [kg · m 2 ]](https://thumb-ap.123doks.com/thumbv2/123deta/6156903.1082542/21.892.150.724.337.954/リムレスホイールモーメントリムレスホイールリムレスホイール.webp)
![図 2.8 に l = { 0.08, 0.12 } [m] とした場合の 2f s に対する f w の遷移傾向の図を示 す.図 2.8(a),(b) を比較すると,脚長を変更するとリムレスホイールの自然歩行 周波数が変わるため,引き込み範囲が変化することがわかる.この際, l が短いほ うが引き込み現象が広い範囲で生じることがわかる.一方で脚長が長くなると引 き込み時に生じる f w 方向の分散が減少する. (a) l = 0.08 [m] (b) l = 0.12 [m] 図 2.8: l を変化させ](https://thumb-ap.123doks.com/thumbv2/123deta/6156903.1082542/22.892.147.726.314.952/に対するリムレスホイール引き込みがわかる引き込みがわかる.webp)
+7
![図 3.4 に f s を 2.0 , 4.5 [Hz] に合わせたときの搬送システムのスティック線図を 示す.図 3.4 においても,図 3.3 同様に,図の色を濃淡によって時間遷移を示して いる. -0.1 0 0.1 0.2 0.3 0.4 0.500.050.10.150.20.250.30.35 (a) f s = 2.0 [Hz] -0.1 0 0.1 0.2 0.3 0.4 0.500.050.10.150.20.250.30.35 (b) f s = 4.5 [Hz] 図 3.4: 搬送シス](https://thumb-ap.123doks.com/thumbv2/123deta/6156903.1082542/30.892.133.753.307.1081/Hz合わとき搬送システムスティック線図示す図におい同様によっ.webp)
![図 3.6 にステージの傾き Φ を変更したときの解析結果を示す.図 3.6 より,前 章の結果同様に Φ の値が上昇すると, X¯ 方向への重力加速度の影響が増大するた め自然歩行周波数の値が増加する.また, Φ の値を上昇させると,引き込み範囲 が増加することが示された. (a) Φ = 180π [rad] (b) Φ = 36π [rad] 図 3.6: Φ を変化させときの f s に対する f w の遷移傾向](https://thumb-ap.123doks.com/thumbv2/123deta/6156903.1082542/33.892.163.749.397.1068/ステージ傾きΦ変更とき解析結果示す図より引き込みに対する.webp)
![図 3.7 に RW 1 の慣性モーメント I 1 を変更したときの解析結果を示す.図 3.7 か ら I 1 の値が小さいほど f s : f w での引き込み範囲が広くなることがわかる.一方で, 図 3.7 から I 1 の値が高くなると, f w の分散は減少し, f s : 2f w の範囲での引き込 み現象が生じることが示された. (a) I 1 = 0.03 [kg · m 2 ] (b) I 1 = 0.12 [kg · m 2 ] 図 3.7: I 1 を変化させときの f s に対する f](https://thumb-ap.123doks.com/thumbv2/123deta/6156903.1082542/34.892.163.751.397.1046/モーメント示す図小さい引き込みがわかる減少し引き込に対する.webp)
![図 3.8 に RW 1 の脚長 l 1 の変化に対する振動搬送機とリムレスホイールの周波数 の関係を示す.図より,本モデルにおいても,l 1 を変化した場合についても引き 込み現象が生じることが確認できた.同一の f s において脚長が異なるリムレスホ イールの f w がそれぞれ引き込まれた場合,脚長の差により歩行速度が変化するた め搬送物の判別や分別への応用が期待できる. (a) l 1 = 0.08 [m] (b) l 1 = 0.12 [m] 図 3.8: l 1 を変化させときの f s に対す](https://thumb-ap.123doks.com/thumbv2/123deta/6156903.1082542/35.892.162.751.398.1052/に対するリムレスホイールについてリムレスホそれぞれ引き込ま.webp)
関連したドキュメント
近年の動機づ け理論では 、 Dörnyei ( 2005, 2009 ) の提唱する L2 動機づ け自己シス テム( L2 Motivational Self System )が注目されている。この理論では、理想 L2
機械物理研究室では,光などの自然現象を 活用した高速・知的情報処理の創成を目指 した研究に取り組んでいます。応用物理学 会の「光
This paper proposes a method of enlarging equivalent loss factor of a damping alloy spring by using a negative spring constant and it is confirmed that the equivalent loss factor of
A Study on Vibration Control of Physiological Tremor using Dynamic Absorber.. Toshihiko KOMATSUZAKI *3 , Yoshio IWATA and
thevibration-controllmgcharacteristicofthesysteminthecaseofparametrlcexcitationisinvestigated,where
北陸 3 県の実験動物研究者,技術者,実験動物取り扱い企業の情報交換の場として年 2〜3 回開
方法 理論的妥当性および先行研究の結果に基づいて,日常生活動作を構成する7動作領域より
・「下→上(能動)」とは、荷の位置を現在位置から上方へ移動する動作。
