白律型移動 ロボッ ト「
DREAM-1」
の
縦列駐車制御
大北
正昭 。三浦
正 嗣 。河野
英正
宮 田
仁志
*1・イヽ
林
康浩 キ
2電気電子工学科 。本
1米子工業高等専門学校・
*2知能情報工学科
(1992年9月 1日受理
)Control of an Autonomous Mobile Robot「
DREA
T‐1」for lts Flush Parking
by
h/1asaaki OHKITA,MaSatugu WIIuRA,Hidemasa KouNO
Hitoshi A/11YATA・
l and Yasuhiro KoBAYASHIホ
2Department of Electrical and Electronic Engineering
*1lFonago National Conege of Technology
*2Department of lnformation and Knowledge Engineering
(Received September l,1992)An autonomous rnobile robOt「I)REAM‐1」has been designed and constructed,which
is controlled by the fuzzy control theory,In this robot,the 10cation and position of the
robot can be recognized with an aid of the distance information obtained by six
supersonic transducers installed in the upper part Of the mobile robot,
In this paper, we consider cOmputer simulatiOn of the fuzzy control of our robot
「
DREAM‐
1」 for the flush parking and the removal from a parking iot. In suchcontrol,the fuzzy rules can be derived by modelling driving actions of a car lt is emphasitted that the forward and reverse movements of the robot can be contr01led smoothly by using silnple membership functiOns
Key words: Autonomous mobile robot with four、vheels,Fuz7y control,Supersonic transducers,Flush parking,
18
大北正昭・ 三浦正嗣・ 河野英正・宮田仁志・月ヽ林康浩:自律型移動ロボッ ト「DREAM‐
1」 の縦 列駐車制御 1,1ま じめに ファジィ理論 は制御への応用 に適 した理論 として最近 特に注目されている。 また、ファジィ理論の応用分野 は 広範囲にわた っているが、列車の制御、浄水場の制御、 家庭用電気製品な どで、既 に実用化 されている[1卜[4]。 我々は、ファジィ制御理論を用いた自律型四輪移動 ロ ボッ ト「DREAM-1」を試作 した[5]。「DRBAM-1」は、走行のス ター ト、 コースの選択の信号を外部 より与えてやれば、 自律走行を開始す る。 ファジィ推論計算の実行及びその 計算結果 による走行方向の決定のために3つのマイクロコ ンピュータ システムを用いている。移動 ロボットの位置 および姿勢 は、 ロボ ッ ト自体 と走行路端 との間の距離を、 ロボッ ト上部の前後及び側面に搭載 した6組の超音波セ ン サにより計測 し決定 される。 また、走行のための外部か らの命令を赤外線 セ ンサにより与える。前輪の方向角の 制御をバルスモータにより、 ロボ ッ トの駆動を後輪部の 直流モータのPWM制御により行 っている。 右折、左折、クランクなどの比較的簡単なコースでの 走行[6]については、昨年度の鳥取大学工学部主催のファ ジィとニュー ロに関する公開講座の際の公開実験でその スムース゛な制御が確認で きた[7]。 本報告では、「DREAM…1」の縦列駐車の実験 に当た り,前
もって行 った走行軌跡の計算 について紹介す る。その計 算は、移動 ロボ ッ トの走行軌跡 の計算機 シミュレー ショ ンを四輪型 モデルを用 いて行 った。なお,本
報告の一部 は,文
献[8]によ り既 に発表 されている。2.走
行制御の原理[9] 本報告で用 いたファジィ変数は単調型 と呼ばれるもの で、メンバー シップ関数は単調減少 または単調増加で直 線型 と呼ばれるものを用いた、 ここでは、メンバー シッ プ関数を次のように表す。 Xi」(x)=aijx+bi」t,■
≦x≦ 1, ここで 0≦aijx+bij≦
1,i=1,2..…
,m,j=1,2,,…
,れ, alJ及びbij
は、 ロボ ッ トの走行す るコー スの形及 び ロポ ッ トの構造 、位 置関係 によ り決 まる定数 で あ る。 j番目のルー ルは、次 のよ うに書 け る。 RJ:if xt is Xl」 (xl),xtt is Xどj(x全),._,
and xm is Xmj(xm), then y is Yj(v).
(2)
ここで
,xl,x2.…
,Xnは
、制御対象 の状態 に関 す る情報 を示す。
yは
、制御対象 に対す る入 力 を示 す。 Yj(y)は、yに
対す るファジイ変数 を示 し、Yj(y)=cjy+djで
あ り、係数c」 およびd」 は、走行 ロボ ッ トの大 き さ及 び前輪方 向切 り角機構 の特性 によ り決 ま る。 フ ァジイ制御器 に対す る入力 X倉=Xど0 とす ると、 j番目のルールRjに対す る適合度 は、 w,=Xlj(xl° )∩ Xどj(x10)∩ .…… ∩ Xm」 (xmD)=
∩ XiJ(xiO). 1=1 次 に、制御 ルールの後件部 において、yjは 次 の関係 を満 足す る値 であ る。 vj=Yj(vj)。(5)
y」(j=1.2,.…,n)は、次 のよ うに書 ける。 y」=Yj l(vj), j=1,2,__n. (6)
結果的 には、 フ ァジィ制御器への入力yO
は、 ︱ > ∼n n
vO=Σ
vjyj/Σ
Wj (7)
d=1 3=1
により決まる。3.四
輪車の旋回運動[10J ここでは走行軌跡の計算機 シミュレー ションに、新た に取 り入れた四輪車の旋回運動 について述べる。 四輪車が ごく低速度で旋回す る際には遠心力の影響 は 無視できる。この状態では遠心力 と釣 り合 うコーナー リ ング・ フォースは必要ないので、 これを発生するための タイヤの横滑 りも不要 となる。すなわちこの場合には各 車輪が横滑 りな しに回転す る理想的な旋回運動を してい ると考え られる。Fig。 1(a)はこの状態を示 した ものであ り旋回中心Oは
後車軸の延長線上 にあって左右の前輸軸の延長線の交点 が常に後車軸の延長上にあるよ うな内外輪舵取 り角 θ, θ'を与える。 Fig.1(a)においてRl,R全,Re,R4(=R3+B「
)を
前後の内 外輪の旋回半径とすると、 (a)1. Relation betveen the steering angle θ
robot (Bf〉B「).(a) Forward and (b) reverse
R金 = Br― Bf R3 = RIcos θ ― ―――――― 2 Br― Bf R4 = Recos θ' + ― 2 ここで し
,Bf,Brは
軸間距離 (ホイールベース)お
よ び前後の輪距 (ト レッ ド)を
示す。 またFig,1(a)よ り得 られ る関係式: (b)and the directio■ φ
of the mobile
movements.RI=
L sin θ と sin θ' Fig.20
大北正 昭 。三浦正 嗣 列駐車 制御 Rttcos θ' ― RIcos θ = Bf に式(3)及び(9)のRl,R倉 の値を代入すれば BF cot θ' ― cot θ = ―――― (13) と とな り、 この式 は、ア ッカーマ ンのか じ取 り方式 の条件 を表 して いる。 (13)5式か ら L θ' = tan 1 -― ―――――――― Bf tt Lcot θ の関係が得 られる。また、本報告では移動 ロボッ トのバ ック走行 も考えるので、説明の便宣上、前進走行の場合 と同様 に図示 してお く(Fig.1(b)参照)。4.移
動 ロボッ トの計算機 シミュレー ション 計算機 シミュレー ションによって描かれ るモデルの軌 跡をより移動 ロボ ットの描 く軌跡に近づけるためにも、 四輪モデルを考える。また、計算機 シ ミュレー ションに よって得 られるモデルの制御ルール、メンバー シップ関 数の最適化を試みる。初めに、移動 ロボ ッ トが駐車場へ 入 る場合、次に、駐車場か ら出 る場合について考える。4-1
移動 ロボ ッ トが駐車場 に入 る場合4-1-1
入力変数 ファジィ制御を実際に適用す るとき、最初 に問題 とな るのは、ファジィ制御ルールをどのよ うに作成するか と い うことである。従来の制御のようには設計手法は確立 されていないが、設計の手順 は整理 きれている。 その手順 としては、制御ルールの形式 と推論法を定め て、具体的に制御ルールを記述す ることである。従 って、 問題 となるのは前件部 と後件部を適当に決定することで ある。 そのために、まず、制御のための情報すなわちファジ ィ制御ルールの前件部変数の選択を行わなければな らな い。 また的確な入力変数を選ぶ ことによって、モデルは 河野英正・ 宮田仁志・打ヽ林康浩:自律型移動ロボッ ト「DREAM‐
1」 の縦 簡略化 される。 ここでは、ファジイ推論 に用 いる入力変数Xl,Xと,X3
およびX4を Fig,2のよ うに考える。具体的には、 Xlは、移動 ロボ ッ トのモデルの左側面か ら、側面 と対 面 しているコー スの端 までの距離、 xとは、モデルの右側面か ら、側面 と対面 しているコー スの端 までの距離、 X3は、モデルの後面か ら対面 している駐車場の端 まで の距離、 X4は、モデルの前面か ら対面 している駐車場の端 まで の距離である。Pig.2. Definition of the input variables
for a flllsh parking.
4-1-2
計算機 シ ミュ レー ションを行 うための条件 縦列駐車を行 う場合の移動 ロボ ッ トの描 く軌跡の計算 機 シミュレー ションを行 うために、い くつかの条件を定 める。一
→
︱
︱
︱
﹂
5
1
1
1
上
移動 ロボ ッ トのモデルの軸距 (ホイールベース)と輪 距 (ト レッ ド
)の
比は、移動 ロボッ トの軸距 と輪距の比 と等 しくす る。また、駐車場の大 きき、位置はすでに分 か っているものとす る。駐車場の大 ききによってはモデ ルが入 りきらないとい うことも考えられるが、 ここでは、 モデルが入 ることが出来 るだけの大 きさがあるかとい う 判断をせず、駐車場の大 きさはモデルが十分に入れるよ うな状態 にあるとす る。モデルの速度 は一定 に してあ り、 加速、減速 は行わないようにする。車輪の動 きについて は、移動 ロボ ットの車輪の動 きに合わせて、左右35度ま で動 くとし、推論結果がそれ以上の動 きを要求 した とき には、35度で止 まるようにす る。現実の車の場合にバ ッ クか ら駐車場へ入 ることが多いので、モデルはパ ック走 行により駐車場へ入るように している。4-1-3
制御ルール[8] Fig。2に示すような駐車場を持つコー スの中で、モデル が縦列駐車 を行 うときの走行制御 について考 える。走行 制御をさせ るにあたり推論ルールを作成す るが、モデル が コースの初めの位置か らバ ック走行 によ って駐車場近 くまで行 き着 くまでの制御のための推論ルール1、 次 にモ デルの一部 または全部が駐車場へ入 ってか ら前輪を切 り 替え して前進す るための制御のための推論 ルール2 (Fig.3,4参照)、 最後に駐車場内でのバ ック走行を制御 す るための推論 ルール3(Pig.4参照)の
、3種のルールを 作成 して考える。 このときのファジィ制御 ルールは、そFig.4. Travelling of the aobile robot in
a case of the fuzzv reasoning by the
rules 2 and 3. 下 ︱ ︱ ︱ ﹂ 5 1 1 1 上
下
︱
︱
︱
﹂
5
1
1
1
上
Fi8・
3. Travelling Of the
a case of the fuzzy
rule 2.
mobile rObot reasoning by
秀饉蛋覇為三浦正嗣・ 門 虹 e宮 陥 志・ガ鵡 浩 :自鯉 拗 ロボット「
DREAM■
」の縦 推論ルール1 i 0 ■ 0 i 0 1,O o 50 推論ルール2 SMALL '1国
1苗
月
即
0 囲 BO 101:団
■ 051国
■0
□
―
O ■垣 篭
国
30 150.
■ 01ミ
IALL x3 2!
0_
隆
FT
む
│、
│:現 鉤
109 tl i 阻 0囲 如i殴
れ
h
とo0 100i睡
■ 0 ■00 `o 0 11lg,5, FJを ztt Variables to infer a s‐toeri■
t angle
θ for a fllsI PaFilht. 50 190 ■58■00
れぞれ 、次 のよ うに書 け る。 推論 ルール
1(バ
ック走行)lf Xl is BIG and X3 iS BIC then θ is to
be LEFT.
If Xl is MEDIUM and X3 is SMALL then θ is to
be RICIT.
If Xl is SMALL and X= is SMALL then θ is to
be RIGHT,
If X4 iS BIC then θ is to be LEFT
推論 ルール
2(前
進走行)とf Xl is SMALL and Xa is BIG then θ is to be とBFT,
If Xl is SMALL and X3 is SMALL then θ is to be RIGHT
推論 ルール
3(バ
ノク走行)If Xt is SMALL and Xt is BIC then θ is to be
LEFT,
If Xl is SMALL and Xtt is SMALL then θ is to be
LEFT
If Xl is SMALL and Xtt is SMALL then θ is to be
RIGHT,
If Xl is SMALL and X4 iS SMALL then θ is to be
RIGHT モデルが駐車場 に入 る場 合 の制御 ルールの メンバー シ ップ関数 を変 えなが ら計算機 シ ミュ レー シ ョンを行 い、 モデルが描 く軌跡 の最適 な場 合の フ ァジィ変数 を Fig 5 に示 した。 それぞれのルールで考 えた フ ァジィ変数 の メ ンバー シップ関数 を Fig.5に 示 す。
Fig。 5で BIC,MEDIUM,及 びSMALLが前件部 の フ ァジィ変
数で あ り、RIGHT及 びLEFTが後 件部 の フ ァジィ変数で あ る。後件部 の傾 きが変 わ って い るの は、 グ レー ドの違 い による ものである。 また前件部 の メ ンバー シップ関数 の 横軸 は距離 で縦軸 は グ レー ドで あ る。
4-1-4
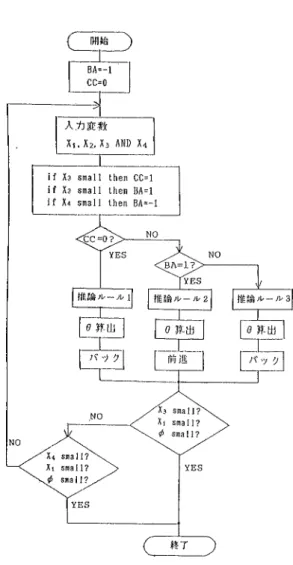
計算機 シ ミュ レー シ ョン モデルが駐車場 に進入す る場 合 の フローチ ャー トを Fig.6に 示す。 フローチ ャー トに示 した計算手順 において BA=-1の ときは、モデル はバ ック走行 を、BA=1の ときは、Fig 6 A procedure used for computer simulation to the flush parking. 前進走行 をす ることを意味す る。 さ らに、CC=0の ときは モデルは駐車場 に進 入す ることを、cc=1の ときはモデル が駐車場 に進入 の後 、適 当 な停上位置 に至 るまで駐車場 の中の どこかで前進・ バ ック走行 を して い ることを意味 す る。 第4章 1節 3項(4-1-3)の 制御 ルールを用 いて行 った計算 機 シ ミュ レー シ ョンの結 果 は Fig 7の よ うに表す ことが で きる。Fig,7(a).(b)及 び(c)1よ、 それ ぞれ、モデルの最 初 にい る位置 を変 えて計算 した もので あ る。 入 力 変散 Xl,X2,XB ANつ X4 X4 Stta l l? Xl sttall? sIHa l J smaII? SIna l l?
秀基蚤矯為手浦正嗣・ 河野英正・宮田仁志,小林康浩
:自律型移動 ロボツ ト「
DRttM■
」の縦一
一
(c)
Flgi 7. Re.sults or the comlp■ter sin“ lation for the
(■)ol the opposite side oF a parking iotと (b)
and (c) on this. side of a ,arrint lot.
□け
Π
flush ,arring, A robot st― arts hear the center of tie vallS,
4-2
移動 ロボ ッ トが駐車場か ら出る場合 4-2■ 入力変数 モデルが駐車場へ入 る場合に考えた入力変数 と同様の 変数 Xl,Xと,X9及びX4を使用す る(Fig.2参照)。4-2-2
制御ルール この場合は上記の走行制御よりも、よ り簡単な手順で モデルを制御することができる。つまり駐車場内でモデ ルが前進・バ ック走行を繰 り返すという点では同 じである が、駐車場へ入 る場合 とは逆で狭 い空間から広い空間へ の移動であるか ら適当な場所に位置す ることがで きれば、 1回の前進走行Qみによって駐車場か ら出てい くことが で きる。 この場合の推論ルールは次のよ うに書 ける。 If Xt is SMALL and Xe be RIGHT. If Xじ is SMALL then θ lf Xど is SMALL then θ lf X3 is MEDIUM and X倉 be LEFT. If X3 iS BIC and XP is be LEFT, is MEDIUM then θ is to is to be RICHT, is to be LEPT. is SMALL then θ is to MBDIUM then θ is to 駐車場か らモデルが出る場合のファジィ変数をPig.8 に示 した。MEDIUM
X3150
BIC
100 200
150100
大北正昭 。三浦正嗣・河野英正 。宮田仁志・イヽ林康浩:自律型移動ロボット「
DREAM‐
1」 の縦 列駐車制御4-2-3
計算機 シミュ レー ション 駐車場か らモデルが出る場合の計算手順のフローチャ ー トをFig,91こ示す。モデルは前進走行によ りその移動 を開始す る。BA=1はこの状況を意味す る。また、BA=-1の ときはパ ック走行を意味す る。 これ らの状況は、我々が 車を運転 して縦列駐車を行 っている場合を想起すれば明 らかであるが、移動 ロボッ トが駐車場の内避近傍か ら出 る場合、または、前輪切 り角が小 さい場合には前進・ バ ック走行を何回か繰 り返す必要があるか らである。 駐車場か ら出る場合の シミュレー ション結果をFig.101 に示す。Pig。 10(a),(b)及び(c)はそれぞれ、モデルの最 初 にいる位置を変えて計算 した ものである。5.検
討 推論法には主 として3つの方法が提案 されている[9]。 推論法1を用 いて推論を行 うと前輪切 り角の算出に積分演 算が必要 なので、区分求積法を用 いたために推論 に時間 がかかる。また、推論法3の場合には、後件部を決定す る のに余分の計算が必要である。 しか し、推論法2を用 いて 推論を行 った場合には、計算が簡単なために推論速度が 速 く、 しか も、 シ ミュレー ションの結果が、推論法1を用 いた推論で行 った場合に比べて劣 らないとい うことが計 算 により明 らかになったので、ここでは、推論法2を用 い た。 上記の計算では移動 ロボ ットがごく低速度 で走行す る 場合即 ちロボ ッ ト自体の慣性が無視で きる場合を考 えて いる。移動 ロポ ッ トには自重があるので、慣性について 検討 し、「 すべ り」の効果を考慮 した シ ミュ レー ション を行 う必要がある。それゆえ、移動 ロボ ッ トを走行 させ るには多少の調整が必要であると考 え られ る。 前述 したよ うに、 ロボッ ト自体 と走行路端 との間の距 離は、ロボ ッ トの前後及び側面 に搭載 した6組の超音波セ ンサを用いて決定 される。 この場合、超音波セ ンサ送波 器か ら発射 されたパルス信号が、対象物 に垂直に当たる 場合には対象物か らの反射波がセンサ受波器 により受信 され、セ ンサ と対象物 との間の距離を正確 に測定で きる。 しか しなが ら、移動 ロボッ トが駐車場 に入 る場合、また は駐車場か ら出る場合には、移動 ロボ ッ トがその方向及 び姿勢を変えるので、この条件か ら外れ る場合が多い。 この問題が今後の課題 として残 される。 本 シミュレー ションの結果に基づいて「DREAM-1」の縦列 駐車実験を行い一応の成果を納めた。Photo lは、鳥取 大学医学部での公開走行実験風景を示す。ペー ジ数 の制 もあ りその詳細は別稿に譲 ることにす る。 6. *jオ)り1こ すでに試作 したファジィ制御理論を用いた 自律型四輪 移動 ロボ ッ ト「DRBAM-1」 の走行実験 を意図 して、縦列駐 車の場合の計算機 シミュレー ションを行 った。 これによ り、縦列駐車のよ うな複雑な走行制御が単純 なファジィFig.9. A procedure used
simulation to enter
parking iot. for coIBputer into the 人力 変数 Xl,X2,X3 AND X4iF X3 Small then BA=1 11 X4 Small then BA=-1
(a)
(b)
(c)
Fig.10. Resul,s of tne co■ ,uteF SimiI―atiO■
A roうot starts (a) 1■ the― vitiェity ol
(b)loar the tentOF Of a ,aTling io■
1parking iot,
□い
口
□い
回
□い
ロ
10r Fe市
oval frOm a
tれo in■Or lolrse
and (c) fron the
parkiag lot.
=■ a parki■を 101, 1■
terior of a
大北正昭 。三浦正嗣・ 河野英正・宮田仁志・河ヽ林康浩:自律型移動 ロボッ ト「
DREAM l」
の縦 列駐車制御Photo l A view of the public exhibition of control for the flush parking of
DREAM-1. 制御 ルールの組 み合せ によ り実行 で きることを明 らか に した。 謝辞 移動 ロボ ッ トの姿勢制御部 の機械加工 に御協力 を頂 い た本学工学部機械実習工場 の方 々に御礼 申 し上 げ ます。 最後 に、平成4年7月に鳥取大学 医学部 において開催 された、本学工学部主催 の フ ァジィとニュー ロに関す る 公開講座 の一貫 と して、「DREAM-1」 の走行制御 に も公開 実験 の場 を提供 して下 さった本学 工学部関係各位 に深謝 致 します。 参考文献
[1] L P Holmblad and 」 J.Ostergaard. "Control of a cement kiln by fuzzy logic", in "Fuzzy
information and decision processes",
(M M Gupta and E,Sanche2, Eds.),North Holland, p 389-399, 1982. [2]安信
,宮
本,井
原,"Fuzzy制
御 による列車定位置 停止制御・,計
測 自動制御学会論文集,19巻 ,11号, 873-880頁,1983 [3]柳下,伊
藤,菅
野,‐フ ァジィ理論 の浄水場薬 品注 入制御へ の応用",
システム と制御,28巻 ,10号, 597-604頁,1984. [4〕 日本 フ ァジイ学 会,特
集 フ ァジ イ応用製品 。技術 日本 フ ァジイ学 会誌,3巻 ,2号 ,2-59頁 ,1991 [5]大北,宮
田,前
田,神
井,小
林,"フ
ァジィ理論 を 用 いた走行 ロボ ッ トの試作",鳥
取大学工学部研究 報告,Vol.21,No.1,pp 75-90,1990. [6]大北,宮
田,小
林,"自律型移動 ロボ ッ ト「DREAM-1」 の走行制御",鳥取大学工学部研究報告, Vo1 22, No l, pp 67-81,1991 [7]大北正昭:"模型 自動車 の 自律走 行",鳥取大学工 学部公開講座「 暮 しに役立 つ フ ァジィとニュー ロJ 講義用 テキ ス ト,1991,[8]M. Ohkita, l Miyata, T, Ohishi, M. Kanazakl and Y Takeda, "Control of a mobile rObOt by
the fuzzy theory Ⅲ. Procす 。f the 13th IMACS World Congress on Computation and Applied
Mathematics (July 22-26,lrinity College,
Dublin,Ireland),vol.3,p.1217-1219,1991
[9]菅野道夫 :フ ァジィ制御,日刊工業新聞社 1988
[側