分 権 的 シス テ ム十 分 割 原 理 と非協 力 ゲ ー ム に よ る ア プ ロ ー チ
奥 田 和 重
1
. 緒 看あるシステムを集権的 とみるかあるいは分権的 とみるかは,集権 と分権の概 念が相対的であるためにその定義 は一般的には困難である。 そこで本請 で は, 対象 とす る分権的 システムをシステム理論の範境で取 り扱われているものとす
る。 すなわち,システムはい くつかのサブシステムで構成 され,各 サ ブシステ ムは何 らかの評価基準 に もとづいた目的関数 と何 らかの制約条件式で表 される ものとす る。 このような分権的 システムの最適化に対す るアプローチとして, 分割原理 によ る方 法 とゲームの理論 における非協力 ゲームによる方 法 が あ
る [1]。
分割原望削ま大規模で複雑な、システムを小規模で複雑なサブシステムに分割 し, その取扱 いを容易にす るものである。 その際,サブシステム間の相互干渉 (相 互関係)を非干渉化 し,各サブシステムを独立 したサブシステムとみなす こと
によって分権的 システムであるとす るものである。 他方,ゲームの理論 で は シ ステムをサブシステムの集 まりであるとみな し,各サブシステムは相互関係 を 考慮 して自 らの評価基準にもとづいて行動を決定す るものである。特に決定権 に優先権のない非協力ゲームにおけるシステムでは,その構造それ自体 が分権 的であるといえる。
例えば,河川流域の自治体 による水資源利用計画問題を考えてみる。流量 が 一定のとき,河川上流の自治体の取水量が多 ければ下流の自治体の取水量 に影
(昭和
6 2
年7 月 8
日受領)〔53 〕
54
商 学 討 究 第38巻 第2号響 を及 ぼ し,
下 流 の 自治 体 の取 水 量 を増す ため には上 流 の取 水 量 を減 ら さ な ければな らな
い 。 分 割 原 理 で は この よ うな自治体 間の相 互 関 係 を断 ち切 って各 々独立 した利用
計 画 を た て ,流 量 のバ ラ ンス を保 つため に 自治 体 間 の計 画 を 調 整す る上位 レ
ベ ル の意 思 決 定 者 (コ ー デ ィネ ータ)を設 置 して全 体 の最 適 化 を実現 させ るも
の で あ る。 非 協 力 ゲ ー ム で は各 自治 体が利 用 計 画 に関 す る情 報 を互いに交換す
る こ と に よ って 相 手 の利 用 計画 を知 り,そ れ を考 慮 して新 た な利 用計画
を作成するもので あ る。分 割 原 理 によ るア プロー チ と非 協 力 ゲ ー ム に よ るそれとの主たる相違は次のようである。分割原理にお い て は システム全体の目
的関数が構成されるが,非協力ゲームにおいては構成 されない。またサ ブシス
テム間の調整は分割原理においては上位 レベルに設置 したコーディネータが行
い,非協ゲームではサブシステム問の情報交換によって 行われる。
本論ではこのような分権的システムに対する分割原理 と非協力ゲームの 2通
りのアプローチについて述べ比較検討する。
2.分権的 システムの構成
2. 1.
サブシステム分権的 システムを構成す るサブシステムはN個存在す るものとし,各 サ ブシ ステ ムを準字 iで表す もの とす る。 各サブシステム
Si
は人身x. ・∈ X
iを 変換 して出力y , . ∈ yi
を得 る入出力 システムS, . :Xi ‑ Y,
・であるとする。ここで
X
‑tとYi
は入力 と出力の集合である。サブシステムS
Lの内蔀構造は, 入力 x'・を出力yi
に変換す るプロセスPi
とこれを制御す る意思決定者DMi
で構成 される。DM,
・はある評価基準D. ・
にもとづいた目的関数G
,‑を持ち,これを達成す るために x,・と
y
Lを観測 してプロセスを制御す る。
この制御す るために決定 される決定変数をui ∈ U i
とす る。 U i
は決定変数の集合である。 このようなシステムは目的追求 システム[ 2]
と呼 ばれ,これを図示す ると図 1( a )
のよ うになる。 これを簡単 に図 1(b)のように表す ことにす る。 このサブシ ステムを定式化す ると次のようになるO分権 的 シス テム
Gi:
X . ×Y , ・ ×Ui
‑‑R P, A :X
,.XU , .‑ ‑Yi
あるいはDi : G .(xi ,y
,・ ,ut )
sub。t o yi ‑Pi(a , . ,Xi )
入 出 力 シ ス テ ム∴
∴. .
一一.
■
ー
■(a・)
(
b )図1
サ ブ シ ス テ ムここで R は実数空間を表す。先の水資源利用計画問題では,入力 xiは気象 条件 のよ うな外乱,出力
yi
は流量 ,決定変数ui
は取水量 で,目的関数Gi
は上水道や農業濯概用水 ,釣 りなどの レジャーに関す る効用関数である。 各 自 治体 は気象や流量 を観測 して効用 を最大 にす るよ うに取水量 を決定す る。
2. 2
分権的 システムの構造分権的 システムは,サブシステム問 に何 らかの相互関係が存在す る複雑 な シ ステムである。 システムが分権的であることは,各 サブシステムが相互 関係 に ある他のサブシステムの決定 に影響 され ることな く自らの決定変数の値を決め ることがで きることである。 この相互関係 には,サブシステム間に共通 した希 少資源が存在す る場合のよ うな間接的な相互関係 と,サブシステム間に入出力 関係が存在す る直接的な相互関係がある。 前者 はシステム干渉,後者 はプロセ
5 6
商 学 討 究 第38巻 第 2号図
2
シ ス テ ム 干 渉ス干渉 と呼 ばれている
[ 3
]。共通資源 の利用可能量 をb∈R
, 各 サ ブ システ ムに分配 され る共通資源 の量 を .bi ∈B. 1 ⊂R
とす る。Bi
は biの集 合 で あ る (図2)
。サ ブシステムが使用す る共通資源 の量 は g,. :Yi X U
,・‑Bi
で定 め ら れ る。 したが って,システム干渉 の場合 のサ ブシステムは,次 の形 で表現 で きる。
y ,・‑P.I(xL,ui)
b i二 g,A(yi,a,.)
さ ら に , 資 源 制約 としてすべてのサ ブシステムに対 して,
∑ r
= l b. l ≦t
(3)
(4)
が成
り 立 たなければならない。他方,プロ セス干 渉 で は ,
相互関係 を表わす 変
数 z i
∈ Z. ・と相互関係の関数 Ki l .YX U‑Ziを 導 入 し て
次の よ うに表 現 で
きる (
図 3) 。
y
.I‑p. ‑ ( ui , X
.I , I, ・ )
zi‑ K
,A(y,a) ( 5)
ここで,
y
∈Y, u ∈U
,Y‑ Yl . ×‑ ・ ×Y N .U‑ U IX ・ ・ ・× UN
である。以下 の議論 の展開 を容易 にす るために,評価基準 として最大化基準 を用 い る ことに し,外部入力 先を無視す る。 システム干渉 は,資源配分型統合法 と して
[ 4
]ですでに詳述 してあるので,本論で はサ ブシステム間の直接 の入 出力 関係 を表わすプ ロセス干渉 を取 り上 げる。分権的 システム
図
3
プ ロ セ ス 干 渉57
3.
分割原理による分権的 システム
3. 1
原問題の定式化分権的 システムに分割原理を適用す るとき,原問題の目的関数 としてサ ブシ ステムの目的関数で構成 されるシステム全体の目的関数が用い られる。多 くの 場合 ,これはサブシステムの目的関数の加法和である。 このような原問題 は吹
のように定式化できる。
Max. ∑r = .Gf( y
,.,u L ,ZL)
Sub・t o yi‑. Pi(a
,.,I, . )
, i‑1,
‑,Nz, ・ ‑ Ki
(y,a)
, i‑1, ・
・・,Nこれを最適化す るために
Lagr ange関数を次のように定義する。
L (y
.1,u
.・ ,I
,. ,}
t,〟i)
仝
∑. N = l G . I(yi ,ui ,Zi) + ∑ r = l A . T ( pi( u
L, I, ・ )‑ yi)
+
∑, N =l P, T(z L ‑K
,I(y,u))
1un Hl ll mu p nu 6 7 8 lⅦ̲ u iZq iZq
(9)
ここでli ,F E .
・はLagr ange乗数である
。 これよ り最適解 は次 の必要条件 を みたさなければな らない。旦
∂y.
・一些∂yi 一
章 滞 貨 ‑o坐 aui a ‑ 99 u, i I ‑ .
樟莞 一
躍慧 ‑o
生 a z. I 壁 aZi i ' ・" T ' 莞 + 拒 O
5 8
商 学 討 究 第3 8
巻 第2
号豊
‑p湖 , ‑ y f ‑0
‑ 申L‑
‑ZぎーK i(y*,u* ) ‑0
∂ f L
ti
分割原理が有効であるのは,サブシステムの数
N
や変数の次元が大 きい とき である。 このような場合,サブシステム問の相互関係をさFF渉化することによっ て原問題を各サブシステムに分割 し,問題の規模を小 さくして取 り扱 いやす く す る。その際,非干渉化によって断ち切 られた相互関係を調整するために コー ディネーターが設置 される。 このコーディネーターが調整す るために用いる変 数 の種 類 によ って,Goalc oor di nat i on me t hod ( i nf e as i bl eme t hod)
とMode lc oor di nat i onme t hod( f e as i bl eme t hod)
がある[ 5
]。前者 は調整変 数 としてLa gr an ge
乗数 〟を用 い,後者 はZ
を用 い る。Goalc oor di nat i on me t hod
は,サブシステムの最適化問題の目的関数 の中に〝が存在す るためにこのように呼ばれ,また最適解を求める過程で得 られる解 は,常 に最適 で はあ るが実行可能性が保たれていないために
i nf e a s i bl e
と呼 ばれてい る。 一方,Mode lc oor di nat i onme t hod
は,サブシステムの制約条件式 の中 にZ
が存在 す るためにこのように呼ばれてお り,最適解を得 る過程の解 は,常 に実行可能 であるが最適性が保証 されていないためにf e as i bl e
と呼ばれている。 この両 者の特徴を生か したMi xe dc oor di na t i onme t hod [ 5
]などが提案 されているが,本論ではこの
2
種類の調整法について述べることにす る。3 . 2 Goa暮Coor di nati onMe t hod
式(9)
よりL(yi,ui.ZL
,
).1 ,〟)
仝
∑,
Nq1tG
,・(y,‑ ,
zLt,
I, ・ )
十㌶ (P, ・(
ui,
I ,.ト y i)+ p
言 Z ,・‑K;(
p,y,Tル ))‑
∑, N = l
Li(yi,u,・,Zi,Ai,〟)
ここで,p‑ (p l,・・・,PN)T
である。分権的 システム
これより第 i番冒のサブシステムの最適化問題 は次のようになる。
Max・ G
i(yi,ui,I, ・ ) +
PTzi‑K ;(p,y,・,ui)Sub.t o
y.I‑ P,.(u,A,I,・)5 9
この最適化問題では,サブシステムはコーディネータよりFEの値が与え られた な らば,他のサブシステムの決定に影響 されることな く自らの決定変数 の値 を 決めることができる。 ところが 〝の値を適切に決めなければ,サブシステム間 の入出力関係が成 り立たない。いま,各サブシステムが与え られた〟の もとに 式
( 1 5)
,(1 6)を最適化すると,必要条件内の式 ( 1 0)〜
(1 3)が等号で成 り
立つ。 したがって,コーディネータは式( 1 4)が成 り立っように 〝の値 を決定
する。 これにNe wt on法を適用す ると次のようになる
。pL+1 ‑
pI , + E ・ ∂L/ ∂p ・( 17)
ここで lはイテ レーションの回数, eはステップ巾である. サブシステム間 の入出力が均衡 したシステム全体の最適解を得 るためには,初 めに任意 の
pl
に対 して各サブシステムが最適化問題 (式 (
1 5)
,(1 6)
) を解 き,その ときのy:,u
I , I ,
Iをコーディネータに送 る。 コーディネータは各 サ ブシステムか ら送 られてきたこれ らの値を用いて式( 1 7)により新 しい 〃Zを計算 し,これを各
′ サブシステムに提示す る。 各サ ブシステムはこの〃2
を用 いて再 び式( 1 5)
,(1 6)を解 く
。 これを解が収束するまで繰 り返す。イテ レー ションの停止条件はある正の徴小量 ∂に対 して,
J z 仁 K. 1 ' ( F L L , y f , u f )
l<∂ ( 18)
が成 り立つ ことである。 この過程を図で示す と図
4
のようになる。いま図5のような水資源利用計画問題を考える。あ る河川 の i番 目の流域 を含む自治体 iがあり,uiだけ取水するとする。 流域 iにおける上流の流量 を zi,下流 の流量 を y,‑とす るO各 自治体 の効用 関数
G
iが y.と uiに関す る
2
次関数で表わされるものと仮定すれば,〟‑3
の とき全体 の最適 化問題 は次のようになる。Max・ ∑, ? =11/ 2(
aiy,?+biu, ? )
Sub・t o
yi‑Zi‑u
i, i‑1,2,3
6 0
商 学 討 究 第3 8
巻 第2
号図
4 G oalCoo r di na t i o nMe t hod
図 5 水資源利用計画問題 (例題)
Z, L 〒 y' ・ ‑
I,i ‑2,3
21 . ‑一定
この問題 の
Lagr a ge
関数 は,L (y
,I ,ui ,Zi ,li ,PL)
仝
∑, ? i l l / 2 ( a, . y. ?+ a
,Lu, ? )+ ∑, ? = lli
(zi ‑ui‑y, ・ ) + ∑ . ? =2 Pi (zi‑yill )
となる。 これを各 才について分割す ると次 のようになる。
自治体 1 :Max .1/2(a. y誓+ b l u 雪 上 p2 y l
Sub .t o y l ‑ Zl l ul
自治体 2:Max .1/ 2(a2 y行 b2u… )+ F E2Z2 ‑ P 3y2
Sub .t o y2‑ Z2‑ u2
自治体 3‥Max .1/2(a3 y g + b3u…)+ p 3Z3
Sub .t o y 3‑ Z31 u3
分権 的 シス テ ム
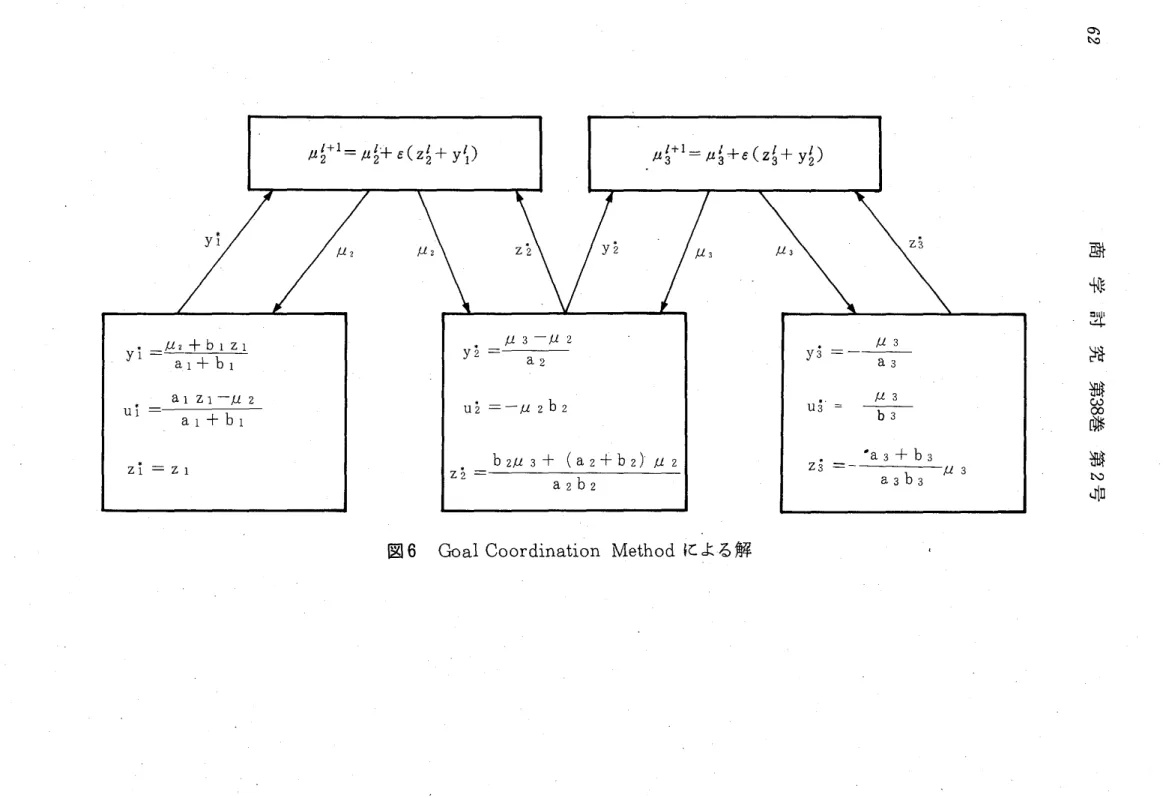
各 自治体について解 くと最適解 は次のようになる。
〟2 + b lZ l
Z
*‑Zl
b 2
P 3
+( a 2 +
b2)〟 2a 2 b2
a8 ナb 3
a3b3 〃3
いまの場合,コーディネータは各 自治体が決定 した ziと
yi
を用 いて〟tを次のように して決める。
pf ' 1 ‑〟 f
+8 ・ ( Z仁 yf ̲ 1 )
,i ‑2 ,3
しこれ らを図示す ると図6
のよ うになる。6 1
3. 3 Mode lCoor di nat i onMe t hod
この方法の場合,式
(9)
のLa gr a nge
関数 は次のようになる。・L( y
i, ui,
a,
li,J L)
仝∑,N=】(G
i( y
i,u
i,Zi)+ AT(p. ・ , (ui ,Zi )‑y, . ) +j LT(2‑K ' ( yi ,a. ・ )) )
‑∑r=
lLi( y
,.,u
i,
I,)
,.,P)
ここで
, I‑( zl ,・
・・ ,ZN)T
である。 各サブシステムの最適化問題 は与 え られた任 意の 2に対 して,62
図
6 G oalCoor d i na t i o nMe t hod
による解卦
亜
畳冷却38醇湖2亜分権的 システム
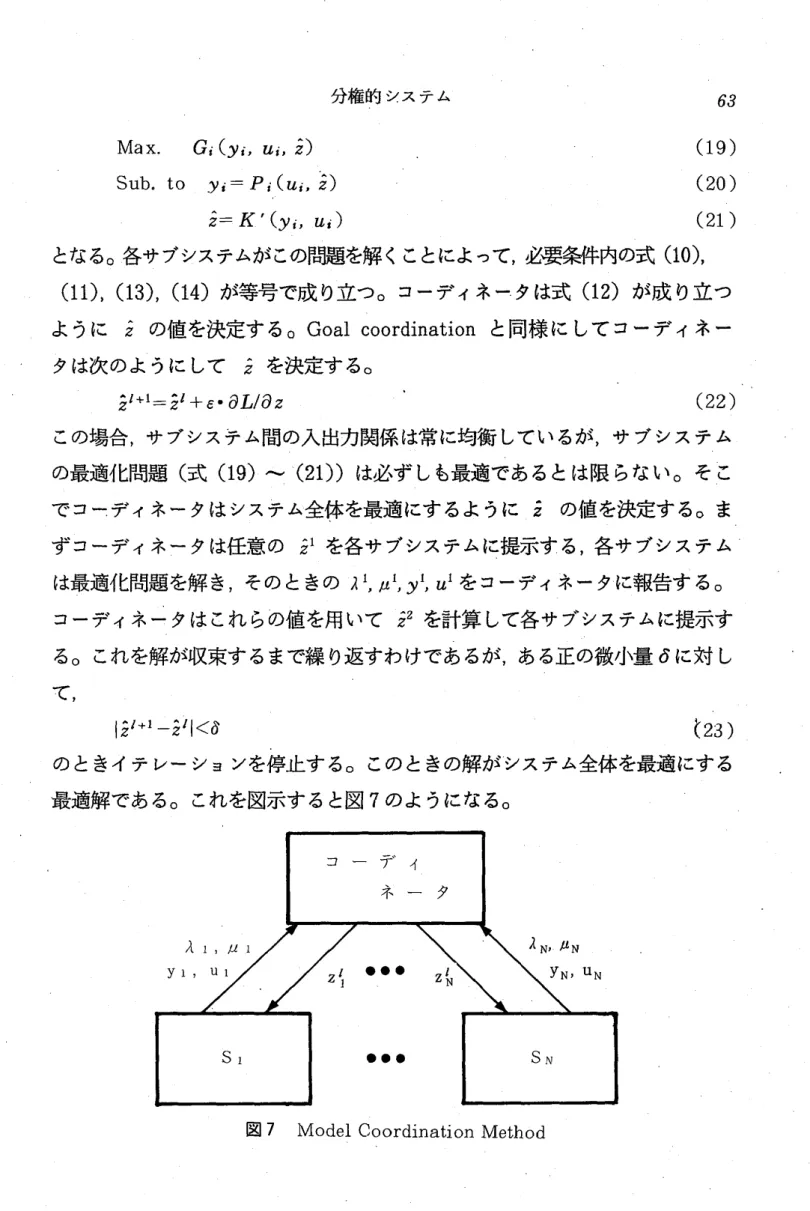
Max. Gi ( yi ,ui ,2 ) sub.t o yi‑ P. ・ (ui ,妄)
2‑
K ' ( y
,I,z L, I )
63
(19)(20) (21)
となる。各サブシステムがこの間題を解 くことによって,必要条件内の式( 1 0)
,(
l l
),(1 3)
,(1 4)
が等号で成 り立つ。コーディネータは式( 1 2)
が成 り立っ ように 2 の値を決定する。 Goa lc oor d i nat i o n
と同様 に して コーデ ィネー タは次のように して 2 を決定す る。2L'1‑ 2 1 + 8 ・∂L / ∂Z ( 22)
この場合,サブシステム間の入出力関係 は常に均衡 しているが,サ ブシステム の最適化問題 (式 (
1 9)〜 \ ( 2
1))は必ず しも最適であるとは限 らない。そ こ でコ「ディネ一夕はシステム全体を最適にす るように 2の値を決定する.ま ずコーディネータは任意の 21を各サブシステムに提示する,各サブシステム は最適化問題を解 き,そのときのス1 ,pl ,
yl ,ul
をコーディネータに報告す る。コーディネータはこれ らの値を用いて
2
2を計算 して各サブシステムに提示す る。 これを解が収束す るまで繰 り返すわけであるが,ある正の微小量 ∂に対 し て,1 2l'1‑ 2
Zl
<6と23)
のときイテ レーションを停止す る。 このときの解が システム全体を最適にする 最適解である。 これを図示すると図
7
のようになる。
図
7 Mod e lCoor d i nat i o nMe t hod
6 4
商 学 討 究 第38
巻 第2
号図
5
の水資源利用計画問題 に このMo de lc oo r d i na t i o nme t h od
を適用す る。各自治体の最適化問題 は与え られた 乏L,i ‑2,3
に対 して,自治体
1:Max. 1/2( al yf +bl u誓 ) Sub. t o y l‑ Z1‑ ul
yl= Z2
自治体
2:Max. 1/2( a2 y2 2+b2u… ) Sub. t o y2‑ Z2‑ u2
y2= Z3
自治体3
:Max. 1/2( a3yS +b3u… ) Sub. t o y3‑ 231 L3
各 自治体について解 くと最適解 は次のようになる。
)
*‑〟 *‑
b l( zl1 22) b2(22‑23)
a3 b3
. ‑‑
blZ l +( al +bl )2 2
‑
b222 +
(a2+ b2) I
‑3
これを解 くことによって決定 された ),・
, F l , I
;を用 いて コーデ ィネータは 2tを 次のように計算す る。分権的 システム
2i +1
‑乏 f +
E・( ]f + pf ̲
I)
,i ‑2,3
これ らを図示すると図8
のようになる。6 5
3. 3
考 察こ こ ま で 分 割 原 理 に お け る
Goalc oor di nat i on me t hod
とMode l c oor di nat i onme t hod
の 解法を概観 してきたが,分権的 システムの立場か ら 若干の考察を行 う。いずれの方法において もコーディネータはサブシステム問の相互関係を調整 す るために設置されたもので,従来中央政府あるいは上位 レベルの意思決定者 などと 「経済的解釈」されてきた。 しか しなが ら企業組織などでは上位 レベル の意思決定者 は下位であるサブシステムの意思決定者よりも大局的で包括的な 計画を作成 し,その計画 に基づいて統制を行い,結果の評価を行 うものである。
統制の中に相互関係の調整が含 まれるか もしれないが,それが上位 レベルの意 思決定者の主たる職分ではない。最適化 の過程 において もコーデ ィネータは
Goalc oor di nat i onme t hod
では相互関係を表す変数Zの匂配,経済的解釈 に よればZの潜在価格( s hadow pr i c e )
の計算 を,Mode lc oor di nat i onme t hod
ではB:の値の計算のみ行 っている。 さらにさきの水資源利用計画問題 において は,中央政府が自治体間の相互関係の調整を専 ら行 うとは考え られない。 これ らの場合,相互関係の調整にはサブシステム間の話 し合いによって解決 され る と考える方がより自然である。 次にサブシステムが直列に並んだ大規模 システ ムを考える。 分割原理では間接的な相互関係が存在する2
つのサブシステムは, 一方のサブシステムの変動草間に存在するサブシステムを介 してのみ知 ること ができる。
たとえば,図5
の例では自治体1
の取水量の変動 は自治体2
を介 し てのみ自治体3
に伝わる。
この場合,最適化の繰 り返 し過程で少な くとも 1回 の遅れが生 じる。 これはコーディネータが直接的な相互関係にあるサブシステ ム間の調整のみ行 うためで,間接的な相互関係にあるサブシステム間の調整 を 行うことができない占図6
,8のような場合,コーディネータの中に2つの調整機構 が存在 し,この間には何 ら直接的な相互関係が存在 しない。これを防 ぐには,商 学 討 究 第38巻 第2号
6 6
笹 崎
TU ‑
PO
ヨaWu O T忘 u Tp J OO U
taP O
W9
回分権的 システム 67
さらに上位 レベルのコーディネータを設置 し,
2
つの調整機構の間の間接的な 相互関係を調整するように しなければならない。これ らのことより,分割原理は分権的 システムを解明するには無理があるといえ,大規模 システムの最適化 を分権的に行 うところにその意義がある。
4. 非協力ゲームによる分権的システム 4. 1
情報交換分割原理では,サブシステムは他のサブシステムの情報を直接知 ることはな い。これは各サブシステムの情報が コーディネータに集中 しているためで,サ ブシステムはコーディネータが これ らの情報にもとづいて決定 した調整変数を 介 して間接的に しかその変化を知 ることができない。ところが決定に優先権の ない非協力ゲームでは,サブシステム間で直接情報を交換するので,他 のサ ブ システムの変化を直接知 ることができる。 このとき各サブシステムが持っ情報 のすべてを交換するのか,あるいはその一部を交換するのかが問題 となる。
∫
もし各サブシステムが持っすべての情報を互いに交換すると,各サブシステ ムは同 じ情報をもつ ことになる。 この場合,これ らの情報を用いて各サブシス テムが最適化問題を作成すると,これはすべて同 じ形になる。 た とえば,前述
した水資源利用計画問題を考える。 各 自治体 は河川の流れを観測 してその流量 を知 ることができるが,他の自治体を流れている部分の流量 は当該自治体 を通
じてのみ知 ることができるとする。そこで各 自治体が観測 した流量や効用関数, 制約条件に関す る情報のすべてを互 いに交換すると,各自治体が作成す る最適 化問題 は同一 となる。 もし効用関数の加法和が許 され るさ らば
,3. 2
節 の数値 計算例で示 した原問題 と同様の最適化問題がサブシステムの数だけ存在することになる。 この場合,同 じ最適化問題をそれぞれ解 くよりも一つの最適化問題 を解けばよい。これは各サブシステムが持つ情報を‑カ所に集中 して,一つの 最適化問題を作成 し,それを解 いた結果を各サブシステムに知 らせるとい う集 権的 システムとなる。 したがって,すべての情報を交換する場合,分権的 シス テムよりも集権的 システムの方が情報交換に要す る費用や最適化問題を解 く費
6 g
商 学 討 究 第38
巻 第2
号用が少な くてすみ効率的である。
他方,サブシステム間に情報交換が全 くなされないとき,各サブシステムは 他のサブシステムのとる行動を推測 して自らの行動を決定 しなければならない。
この場合,各サブシステムのとる行動の不確実性が増す ことになる。さ らに各 サブシステムは他のサブシステムの決定変数の値を推測 し,その値にもとづい て相互関係を満たすように自らの決定変数の値を決めなければならない。この ように推測にもとづいて決定 される値 はまた他のサブシステムによって推測 さ れるので,サブシステム間で推測が繰 り返 されろことになる
。
水資源利用計画 問題では,各自治体 は他の自治体の取水量を推測 して効用関数の期待値 を最大にする取水量を決定することになる。
つぎに各サブシステムが持っ情報の一部を交換する場合を考えてみる。 各サ ブシステムが持っ情報には,最適化問題を解 く前に既知であるものと解 いた後 に明 らかになるものとがある。前者 は目的関数や制約条件式の構造,あるいは データとしてあ らか じめ与え られる係数,過去の決定変数の値である。 これ ら の情報 は事前に情報交換することができる。後者は最適化問題を解 くことによっ て決定 される決定変数の値である
。
分権的 システムは,各サブシステムが他 の サブシステムとの相互関係を断ち切 って独自に自らの決定変数の値を決定する ものである。分割原理では相互関係の調整はコーディネータが行 うが,非協力 ゲームでは各サブシステムが持っ情報の一部を交換することによって相互関係図
9
情 報 交 換分権的 システム
6 9
の調整を行 う (図
9)
。交換することのできる情報 は先に述べた事前 に知 るこ .とのできる情報である。 この事前に知 ることのできる情報を用いて,相互関係を満たすような各サブシステムの最適解を得 る方法を次節で述べる
b
4. 2
非協力ゲームによる最適化i番目のサブシステムの最適化問題 は次のようになる。
Ma女。
Gi(y,.,Z
L.・,I,・)Sub.t o
y.I‑P.・(a,.,zi)zi‑KL(y,u)
(26)
式 ( 2 6)を式
(24),(25) の Z,・の項 に代 入 して整理す ると,サ ブ システ ム の最適化問題は
つ ぎの よ うに な る。Max。
Gi(y,ul,・・・,uN)(27) Sl l b.t o
y‑P(a.,・・・,uN)(28) 式 ( 2 4)〜 ( 2
6)の最適化 問題 で は,相 互 関 係 は プロセ スへ の入 力 と して式
( 2 6)で表 され
て い るが ,式 (27),(28) の最 適 化 問題 で は,目的関数 と状態方 程式内に現れて
い る.i番 目の サ ブ シス テ ム は, uJ・,i≠メ,j‑1, ・ ・ ・ ,N lが 与 えられているも
の と して ,この間題 を最 適 にす るよ うに決 定 変数 uiと y' Iを 決定する。式 (
28) は シス テ ム全体 の状 態 方 程 式 で ,各 サ ブ システムは シス テ
ム全体の状態方
程 式 の構 造 が わか って い る もの とす る。 いま
J, . ( ul , ・ ・ ・
,uN)仝G.A(y,ul,・・・,uN)とする.vui∈
U,・, i‑1,・・・,N に対 して ,J. I ( uT , ' ・ . ・
,頑 )≧Ji(uf,・・・,a,?̲.,a,・,a.ll,・・・,嶋 )(29) であれば,この
とき u芋∈U,・は Nash 均 衡 解 で ある [ 6]。 式 ( 2 9) はN
コのサブシステ
ムが相互 関係 を満 たす最 適解 を得 るために は,それぞれ の最 適
化問庵が同時に
最 適化 され な けれ ば な らな い ことを意味 して い る。いいかえれ
ば,他のサブシス
テ ムが Nash 均 衡解 を採 用 して いる限 り,各 サ ブシステムに
は Nas h均衡解
を改良 す るよ うな解 が存 在 しな い ことで あ る。 この Nas h 均
7 0
商 学 討 究 第3 8
巻 第2
号衡解を求めるために最適化問題 (式 (27),(28))に対する Lagrange関数を 次のように定義す る。
L.I(y,ul,‑,ZEN
,}i )
仝G
,.(y,z
L.・,.‑,uN)+ 訂 (p(u1 , . . .
,uN)‑y)‑
G ・.(P(u
l・‑,uN)一u
l・‑,.uN)十
号 (P(ul ・
‑,uN)‑y) これより最適性の必要条件 は次のようになる。箸 ‑告 G "
y・
・u T ・ ・
・・ 瀬 一丹‑0
㍍
8Li ‑£
p (uT・‑湖) 7 意 G L( y* ・uT , ・ ・ ・ ,uk)
I^・ f T
志p(uT,・・・・uk)‑0豊 ‑ p( u
・,,・・ ・
,嶋 ) ‑y*‑0
( 30)
N コのサブシステムでこの必要条件を同時に満 たす u芋
,y*
,),? が存在す るとき,解 はNas h
均衡解 となる。必要条件 (式( 3 0)〜 ( 3 2))
を満 た すNas b
均衡解 は一般的に無限個存在する。 しか し目的関数がある2
次関数 で状態方程式が線形のとき唯一存在する。 この2
次一線形モデルが次の形式で 与え られているものとす る。Max・
1/2
(yTQ
.,・y+∑,q‑‑1u;・Ri,・uj)sub.t o
y‑ Z。+∑,FglBjujここで
Q
・・は対称行列,RLi.>0
,zo‑ (zl
・Zl
,Zl)Tであるとす る。 この ときL
agrange関数 は次のようになる。 L,.(y,
u
l,・・・,uN,).I)仝 1/2(yTQ.・y
+
∑,q‑1ZL31R,
.,・uj)+ A ; ( z o+ ∑r = l
B,・u,・‑y)‑ 1/2((Z。+∑,F=lB,・u,・)TQ.・(Z。+∑rtlBju,・)
+ ∑, F = l u
3・R,.,・uj)+ lT(Z。+∑r ‑
1B,・ui‑ツ) \ 必要条件 は,式( 3 0)〜 ( 3 2)
より分権的 システム
塾 . ‑Q, ・ y*雄 ‑0
8y
旦む a u i ‑B TQL ,・ + R. l tu f'B 律 =o
∂Li
扇7‑
2 0 + ∑ , "
=iBj か ッ
*=
0となる。 これよ り,
u芋‑‑2Rl I BTQ. ・ I l ‑l z 。 y* ‑p‑ lzo
), 仁 Q, ・ I l ‑ Ilo
7 1
.'E.:I' 粥 .1. , iZq ヨ iZq ) \ノ ) 8 9 0 3 3 4 iZq lⅦ 川U iZq
を得 る。 ここで,
I l ‑ ( I‑2∑r ‑l B, ・ Ri i ・ B;Q, ・ )
である。 この結果を見 ると行列 B,R
,Q
と初期値z
oはいずれ も事前 に知 る ことがで きるものである。 したが って,各 サブシステムは他のサブシステムの 最適化の結果を知 ることな しに自 らの決定変数 の値を決めることがで きる。水資源利用計画問題 にこの結果を適用す る。まず情報交換が全 くなされてい ないとき,自治体 iは上流の流量
y? ‑ 1
を与件 と して次 の間題 を解 く。 ただし,簡単化 のために
y. 9 1
1は確定値 とす る。.
Max. 1/2( a, ・ y, ? +b, . a. ? ) Sub ・t o yi ‑y. 9 ̲ 1 ‑ul ・
ここで
y3‑z
lである. この間題 のLagr a nge
関数 は次のよ うになる.Li(
yL,a
.A,),・)仝 1/2( ai y. ? +bi n. ?
)+)i ( y, 9 ̲ 1 ‑Z L . ・ ‑y. A )
これよ り必要条件 は,∂エ i
‑ ‑a. ・ yT‑), 仁
0,i ‑1,2,3
8yaL , ‑
‑ ニ ーai y* + b, ・ u芋 十 好‑0, i‑
1,2,3
∂L L i
aL.・ 0‑
‑y
i‑I‑a,?一
㌦‑ 0 , i‑1,2,3
∂A
i7 2
商 学 討究
第38
巻 第2
号となる
。
これ らの式より最適解 は次のようになる。
2αi
o
u
・ ? = 転
了宕 y ・ ‑
ll,i ‑1,2,3
yf‑ 亘 k yf 9 ‑
1・i‑1 ,2,3
a. 1
b.
・o
1 ・ ? = 亘
完了云y
i‑1 , i ‑
1,2,3これを図示す ると図10のようになる。
情報交換を行 う場合を考える。そのために行列を次のように定義する。
Q , I :
i行 i列の要素が.a'.で他の要素が 0の3×3
行列,Ri , I ‑[bi ] ,B
l‑(
1,1 ,1
)T,B 2 ‑(
0,1 ,1
)T,B3 ‑( 0,0 ,
1)T.
これ らを用いて自治休 iの最適化問題を定式化すると次のようになる。
Max.
1/2( y T Q, ‑ y+bi u, ? ) sub.t o y‑I .+∑, q 三l Bju, ・
Qi
は対称行列,R , ・ . I ‑[b, . ]>0
であるか ら,式( 3 8)〜 ( 4 0)の結果がその
まま適用でき,次のようになる。ポ ‑2/a, ・ BTQ
,・ナトl z。
y * ‑I l ‑ 1 z o lヂ‑Q, L T 1 z o
ここで,I l ‑( I+2∑, 3 ‑l l/b, ・ B, . B, TQj)
∴ ∴
∴
̀∴図
1 0
情 報交換 のない水資源利用計画問題分権的 システム
である。 これを計算す ると次のようになる。
I l ‑ 2a l +b l 0 0
2a1 2 a2 +b2 bl b2
2 a1 2a2 2 a3 +b3 bl b2 b3
これの逆行列 は存在 して,♭ 1
2a l
+bl‑bl b2
( 2al +b l )( 2 a2 十b 2 )
‑2 al b2 b3
これより
z L *‑
0 0
b2 2a2 +b2
‑2 a2 b3 b3 ( 2a l +b l )( 2 a2 +b2 ) ( 2 a3 +b 3 )( 2 a2 +b2 )( 2 a3 +b3 )2a3 +b3
b
12 al
+bl
bl b 2
Zl
( 2 al +bl ) ( 2 a2 +b 2 ) bl b2 b 3
Z l
( 2a l + bl ) ( 2 a2 +b 2 ) ( 2 a3 +b 3 ) 2α1
喜 右 手五 2 1 2 a2 b
l( 2a l +bl ) ( 2a2 +b 2 ) 2 a3 bl b2
Zl
( 2a l +bl ) ( 2 a2 +b2 ) ( 2 a3 +b3 ) a
lb1
2
al+bl
a2 bl b2
Zl
( 2 al +bl ) ( 2 a2 +b2 ) a3 bl b2 b3
Zl
̲( 2a l +bl ) ( 2 a2 +b ・ 2 ) ( 2 a3 +b3 )
7 3
7 4
商 学 討 究 第38巻 第2号となる。 これより,各自治体 は事前に互いの効用関数の係数を伝えてお くと, 流量の初期値
zo
がわかれば,他の自治体が決定 した取水量を知 ることな しに自らの最適な取水量を決定することがで■きる (図
1 1 )
0a
l,bl
図
1 1
情報交換がある水資源利用計画問題4. 3
考 察非協力ゲームによる分権的 システムは,優先順位がない同一 レベルのサ ブシ ステムにより構成 され,それぞれに独 自のDMを有 し固有の目的関数を持 って いるところにその特徴がある。 またサブシステムは,他のサブシステムの不完 全な情報 と自らの制御範囲に関する情報を持
っ 。
このような分権的 システムで は,各サブシステムが固有の目的関数を持っために評価基準の異なる目的に関 する多 目的制御が可能 となる。 またあるサブシステムに不都合 (たとえば故障) が生 じた場合,残 りのサブシステムの機能を有効に働かせることによって シス テム全体の機能の低下をある程度防 ぐことができる。 この結果,システムの信 頼性や安全性の向上が期待でき,さらにサブシステムの追加,削除が容易で シ ステムの柔軟性が増す。しか しなが ら,分権的 システムが本来有す る特徴を認めることによって もた らされる制御性能の低下や システムの煩雑さ,無計画な肥大化を招 く可能性 も ある。さらに
Nas h
均衡解が唯一存在するのは,ある限 られた2
次‑線形 モ デルの場合のみで,一般的には集合 として解が得 られる。これはサブシステム 間の調整を行 うコーディネータが存在 しないために,サブシステム問での話 し 合いがっかない場合である。このようなことは実際によく見受けられる。Nas h
均分権 的 システム
7 5
衡解の集合の中か ら一つの解を決定する方法として
Nas h
均衡解の正規性[ 7]
が 有力な概 念となるかもしれない。本論では相互関係 として直接的な相互関係であるプロセス干渉の場合について述 べてきた。これはサブシステム間の入出力になん らかの競合関係が存在 しているこ
とを前提 としている。間接的な相互関係であるシステム干渉の場合の共通資源の配 分問題では,限 られた資源の取得に関 してサブシステム問&.=競合状態が存在す る。
非協力ゲームではコーディネータが存在 しないためにサブシステムが資源の奪い合 いを演 じることによってシステムの制御性能を低下させるかもしれない.こねよ う な場合,サブシステムが協力することによって公正な資源配分を行 う協力ゲームに よるアプローチが有効であると思われる。
分割原理では
Lagr ange
乗数か相互関係を表す変数のいずれかを与え られた も のとしてサブシステムが独自の最適化問題を解 くが,非協力ゲームでは他のサブシ ステムの決定変数の値が与え られたものとして独 自の最適化問題を解 くものであっ た。Nas h
均衡解は一般的には無限個の解の集合として得 られるが,同 じ問題 を分 割原理で解いたときに得 られる解 との関係,ある2
次‑線形モデルのとき唯一存在 するNqs h
均衡解 との関係,あるいは分割原理における収束性の問題 との関係な どの比較検討は,先の協力ゲームによるアプローチとともに今後の課題 としておく。5.
結 音本論では分権的 システムに対す る分割原理 によるアプローチと非協力ゲーム によ るアプ ローチ につ いて述 べ た。 分 割 原 理 に よ るアプ ロー チ は,
Goal c oor di nat i onme t hod
とMode lc oor di nat i onme t hod
につ いてその最適化 法 と分権的 システムとしての解釈 を述べた。そこでは,分割原理 は分権 的 システムを解明す ることには適 していないこのを明 らかに した。 しか しこれは大規 模 システムに対す る分割原理 の有効性 を必ず しも否定す るものではない。実際 に電力 システムや道路交通 の制御 などに適用 されて効果 な結果が得 られている ことが報告 されている
[ 8
]。 しか しなが ら,これ らは大規模 システムを分権 的 に最適化 しているだけであ り,分権的 システムその ものを取 り扱 っているわけ7 6
商 学 討 究 第3 8
巻 第2
号 ではない。非協力ゲームによるアプローチでは,モデルが分権的 システムとして構成 さ れているのでそれを解明す るには有効である。本論では,非協力 ゲームによ る 最適化法を述べ分権的 システムを取 り扱 うのに有効であることを明 らかにした。
しか しサブシステム間を調整す るコーディネータが存在 しないために,あ る
2
吹‑線形 モデル以外ではNas h
均衡解 は無限個 の解 の集合 とな る。 集合 の中 か ら一つのNas h
均衡解 を決定す る有効 な手段 はないが,Nas h
均衡解 の正 規性 を利用す ることは有効であるか もしれない。参 考 文 献