フリームービング環境下の小動物に対 する中間周波数帯磁界ばく露実験のた
めのドシメトリ及び環境要因手法の 開発
首都大学東京 理工学研究科
電気電子工学専攻 16882323 中村 瑛郁
指導教員 鈴木 敬久 教授
1.1
研究背景. . . . 3
1.2
研究目的. . . . 3
1.3
本論文の構成. . . . 4
第
2
章 磁界起因の亜急性影響探索のためのin vivo
研究5 2.1 ICNRIP
のガイドラインとの関係性. . . . 5
2.2
概要. . . . 5
2.3
ばく露評価システム. . . . 5
2.3.1
システム構成. . . . 5
2.3.2
フリームービングに小動物に対するドシメトリ. . . . 6
2.3.3
環境要因評価手法の開発. . . . 6
第
3
章 マウスの解剖学的モデルの作成7 3.1
体内誘導電界解析に用いてきたマウスモデル. . . . 7
3.2 X
線CT
を用いたマウスの解剖学的モデルの作成. . . . 10
3.2.1 X
線CT
を用いたマウスの撮影. . . . 10
3.2.2
各部位の同定. . . . 13
3.3
作成したモデルを用いたドシメトリ. . . . 16
3.3.1 3
次元インピーダンス法. . . . 16
3.3.2
マウスモデルの体重変更. . . . 18
3.3.3
一様磁界のドシメトリ. . . . 19
3.3.4
均一モデルによるドシメトリ. . . . 21
3.3.5
楕円体モデルによるドシメトリ. . . . 22
3.4
ばく露装置を模擬したドシメトリ. . . . 24
3.4.1
磁束密度の計算. . . . 24
3.4.2
体内誘導電界計算の結果. . . . 27
3.5
結論. . . . 28
第
4
章 音ばく露装置の開発30
4.1
音ばく露実験. . . . 30
4.2
ばく露装置から生じる振動音の定量化. . . . 30
4.2.1 LDV
を用いた音圧測定方法. . . . 30
4.2.2
ばく露装置から生じる振動音の測定. . . . 33
4.2.3
ばく露装置から生じる振動音のシミュレーション. . . . 33
4.3 85kHz
対応スピーカーの音圧測定. . . . 36
4.3.1
スピーカーの配置決定. . . . 36
4.3.2
音ばく露装置の音圧測定. . . . 37
4.4
結論. . . . 38
第
5
章 結論39
謝辞
42
本研究に関する研究業績
43
1.1 研究背景
近年
, WPT (Wireless Power Transmission)
システムの開発に伴い,
中間周波数帯(300Hz
- 10MHz) [1]
の時間変動する磁界の技術利用が拡大している.
そのため,
時間変動する磁界による生体影響に関心が高まっている
.
中間周波数帯磁界の健康影響に関する知見の収 集が望まれることから, WHO
の極低周波電磁界に関する環境保健クライテリアでは,
中間 周波数帯についてばく露評価や疫学研究, in vivo, in vitro
研究が奨励されている[2].
これに伴って中間周波数帯の磁界の生体影響を調査するが行われてきた
.
例として,
小 動物を用いたin vivo
研究では, 20kHz
の鋸歯状磁界ばく露による体重の増加や催奇形性の影響評価
[3]
や20kHz, 60kHz
の正弦波磁界の長時間ばく露による催奇形性の影響評価[4],
20kHz
の三角波磁界ばく露による健康への影響評価などが行われてきた[5].
我々の研究グループでは
, WPT
システムの主な周波数帯となる100 kHz
帯の非熱的・非刺激的生体 影響について, in vivo
研究を行ってきた[6] [7].
我々は
100kHz
帯においてICNIRP (International Commission on Non-Ionizing Radi-
ation Protection)
のガイドラインの基本制限程度の体内誘導電界が得られる磁界の生体影響について評価している
.
この研究では,
生体影響評価を行ううえでストレス影響を抑 えるために,
マウスはばく露装置のケージ内を自由に動くことができる.
しかし,
先行研 究[7]
ではドシメトリを行ううえでマウスの姿勢に関しては考慮されていない.
また磁界 起因の体内誘導電界のみの生体影響評価を行うために,
電界や超音波,
熱といった磁界以 外の環境要因の定量評価も行われたが,
交絡因子の影響を取り除くための超音波ばく露実 験は行われていない.
したがって,
姿勢を考慮したドシメトリの研究や超音波のみのばく 露による生体影響評価の研究が求められる.
1.2 研究目的
以上より本論文の目的は
,
姿勢変更可能なマウスの解剖学的モデルの作成及び超音波の みのばく露による対照実験を行うための音ばく露装置開発とする.
姿勢を考慮したマウス モデルの作成の前段階として, X
線CT
を用いて,
新たにマウスの解剖学的数値モデルを開発する
.
また,
磁界ばく露装置が生じる超音波を測定し,
測定値と同程度の強さの超音波 を出力できる超音波ばく露装置の開発を開発する.
1.3 本論文の構成
本論文の構成を以下に示す
.
本章では,
研究背景と目的について述べた. 2
章では,
我々 の研究グループが行ってきた研究と本論文の関係性を示す. 3
章では,
マウスモデル作成手 順及び体内誘導電界評価について述べる. 4
章では,
超音波の実験影響評価手法の開発につ いて述べる.
2.1 ICNRIP のガイドラインとの関係性
電磁界の影響から人体を防護するために
, 2
つの制限値が制定されている.
一つ目は基本 制限であり,
健康影響と関連付けされた物理量に基づくばく露の制限値を指す.
二つ目は 参考レベルであり,
基本制限から計算され、間接的に有害な影響を制限する値を指す.
我々 は基本制限で与えられる体内誘導電界を物理量として選択し評価を行う.
そのため,
マウ スを対象としたin vivo
磁界ばく露実験を行う上で,
基本制限の周辺またはそれ以上の体内 誘導電界を得たいと考えている.
しかし,
人体とマウスではスケールが大幅に異なるため,
基本制限の周辺またはそれ以上の体内誘導電界を得るには,
磁束密度が数mT
以上の磁界 をばく露させる必要がある.
したがって,
我々は磁束密度が数mT
以上得られる磁界ばく 露装置を開発し,
そのばく露装置を用いて磁界起因の体内誘導電界による生体影響評価研 究を行っている. .
2.2 概要
図
2.1
に磁界起因の体内誘導電界による生体影響評価研究の構成について示す[7].
我々 が行っているin vivo
磁界ばく露実験は3
つの研究で構成されている. 100kHz
帯において 対象の実験動物に基本制限程度の体内誘導電界を発生可能な磁界ばく露装置の開発例はな かったため,
新たに装置開発が行われた. in vivo
磁界ばく露実験では,
開発された磁界ば く露装置を用いてばく露実験を行い,
酸化ストレスマーカーや行動解析,
遺伝子解析によっ て生体影響評価を行っている.
ばく露評価システムでは,
磁界ばく露装置から生じる磁界 による体内誘導電界評価や環境要因の定量化が行われている.
2.3 ばく露評価システム
2.3.1 システム構成
ばく露評価システムでは
, in vivo
磁界ばく露装置開発研究に対して設計評価, in vivo
磁 界ばく露実験による生体影響評価研究に対して環境要因による実験影響評価を提供してい図
2.1:
磁界起因の体内誘導電界評価による生体影響評価研究の構成る
. in vivo
磁界ばく露装置開発では,
ばく露評価システムが提供するばく露用コイルの巻線間電圧や磁束密度分布の評価
,
体内誘導電界解析等を基に,
ばく露用コイルの構造設計 や入力電流が検討されている.
また,
本磁界ばく露実験では高い体内誘導電界を得るため に,
高い入力電流を用いている.
高い電力帯での実験であるため,
電界や超音波,
熱等の磁 界以外の環境要因が発生し,
磁界による体内誘導電界による生体影響と分離して評価する ことが困難になる可能性がある.
したがって,
環境要因について定量化手法及びその影響 について検討が行われた.
2.3.2 フリームービングに小動物に対するドシメトリ
本
in vivo
磁界ばく露実験ではストレス影響についても評価を行っている.
生体影響評価を行ううえでストレス影響を抑えるために
,
マウスはばく露装置はケージ内を自由に動 くことができるように設計されている.
そのため,
マウスは磁界ばく露中に様々な姿勢を とる.
姿勢によって体内を通る磁束の量が変化するため,
体内誘導電界が変化する.
した がって,
本実験のドシメトリを行う上で姿勢を考慮する必要がある.
本論文では,
姿勢変更 可能なマウスモデルの開発を検討した. .
2.3.3 環境要因評価手法の開発
本
in vivo
磁界ばく露実験では,
磁界起因の体内誘導電界による生体影響評価のために,
環境要因の定量化及びその影響評価を検討してきた
.
特に超音波は定量化の式導出が行わ れ,
その式を基に磁界ばく露装置の音圧レベルの測定が行われた.
しかし,
磁界ばく露装置 が生じる超音波による生体影響の評価については行われていない.
交絡因子の影響を取り 除くために,
超音波のみのばく露実験を行う必要がある.
本論文では,
超音波ばく露実験を 行うために,
超音波ばく露装置の開発を検討した.
とる
.
姿勢によって体内を通る磁束の量が変化するため,
体内誘導電界が変化する.
本実験 のドシメトリを行う上で姿勢を考慮するために,
姿勢変更可能なマウスモデルの開発を行 う.
本章では新たなマウスモデル作成の理由をはじめに述べ,
マウスモデル作成手順を示 す.
最後に開発したモデルについてドシメトリを行い,
ドシメトリの妥当性を評価した.
3.1 体内誘導電界解析に用いてきたマウスモデル
まず初めに
,
我々の研究グループが体内誘導電界解析に用いてきたモデルについて,
問 題がないか確認した.
図3.1
に我々の研究グループが体内誘導電界解析に使用してきたマ ウスの解剖学的モデルを示す.
マウスモデルはITIS Foundation [8]
で作成された29g
の 妊娠したマウスである.
本論文ではこのモデルを妊娠モデルと呼ぶ.
また,
妊娠モデルの 各パラメータを表3.1
に示す.
各組織の導電率はGabriel
のパラメトリックモデルから周 波数100kHz
の値を用いている[9] [9].
体重は密度を0.001g/mm
と仮定して計算している(
体重に関して以降も同様に仮定し計算する).
図
3.1:
従来のマウスモデル表
3.1:
妊娠モデルの各パラメータ[8]
ボクセルモデル
[mm
3] 1 × 1 × 1
サイズ[mm
3] 34 × 34 × 34
マウス全身を構成するボクセル数27538
体重
[g] 27.2
この妊娠モデルについて
,
解剖学的に問題がないかマウスの断面解剖図アトラス[11]
と 比較を行なった.
図3.2
に妊娠モデルの断面図,
図3.3
アトラスに載っている腎臓部の断面 図を示す.
また,
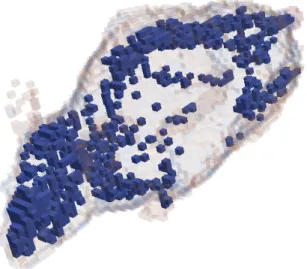
妊娠モデルの骨のみを抽出した画像を図3.4
に示す.
図
3.2, 3.3
より,
腎臓と骨の位置関係について着目すると,
断面解剖図では腎臓は骨より腹側にあることが確認できるが
,
妊娠モデルでは腎臓が骨よりやや背側にあることがわか る.
また,
図3.4
より,
骨が繋がっておらず,
分散的に配置されていることがわかる.
これ らのことから,
妊娠モデルは解剖学的に問題があることが確認できる.
したがって,
このモ デルに姿勢を変形指せるような処理を施した場合,
作成できる姿勢変形モデルはさらに解 剖学的に問題が大きくなる可能性がある.
ここで,
新たに解剖学的に妥当なマウスの数値 モデルの作成することを試みた.
図
3.2:
妊娠モデルの断面図(
腎臓)
図
3.3:
マウスの断面解剖図(
腎臓)
図
3.4:
妊娠モデルの骨部3.2 X 線 CT を用いたマウスの解剖学的モデルの作成
小動物の数値モデルの作成方法として
X
線CT
を用いた方法がある[13] [14].
今回X
線CT
を用いてマウスの数値モデルの作成を行った.
3.2.1 X 線 CT を用いたマウスの撮影
まず
, X
線CT(
株式会社リガク, CosmoScan GX)
を用いてマウスの撮影を行なった.
撮 影には6
週齢の20.2g
の雄のマウス(
日本エスエルシー株式会社, C57BL/6NCrSlc)
を用い た.
撮影の際,
造影剤を用いることにより,
臓器でのX
線吸収量を増加させ,
臓器を抽出し た.
使用した造影剤は2
種類でExiTron nano 6000, ExiTron nano 12000(Miltenyi Biotec
社
)
である. ExiTron nano 6000
はアルカリ土類金属を原料とするナノ粒子コントラスト試薬であり
,
肝臓や脾臓などの臓器の抽出に適している. ExiTron nano 12000
はExiTron
nano 6000
の濃度が2
倍であり,
血管造影に適している.
撮影の設定を行う際に管電圧及び管電流を変化させて撮影を行った
.
管電圧を下げた場合,
透過力が低下し,
軟組織でのX
線吸収量が増加する可能性があるが, X
線強度が低下する.
管電流を上げた場合, X
線強度 が高くなる.
そこで,
管電圧を下げるのと同時に管電流を上げて,
数パターンの条件のもと 撮影した.
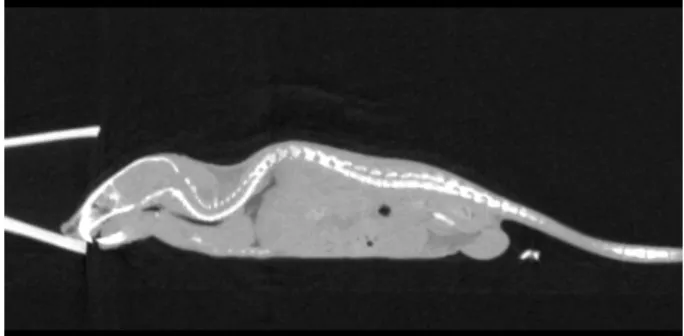
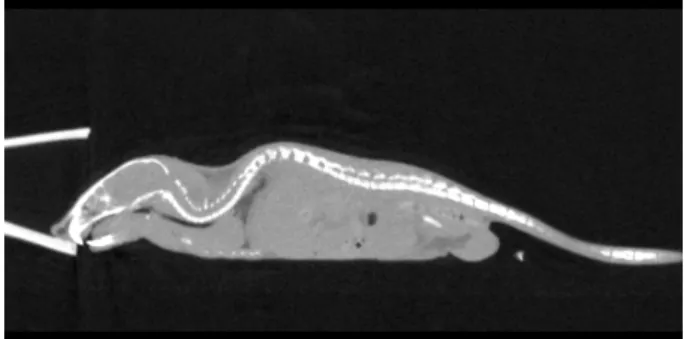
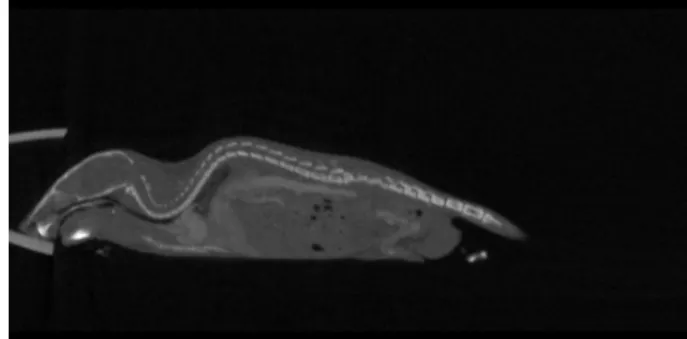
また,
撮影した結果を図3.5-3.13
に示す.
ここで,
図3.5-3.13
は画像処理ソフト ウェア(National Institute of Health, imageJ)
によって,
得られたX
線CT
画像について 矢状面の断面図を表示させた画像である.
図3.5-3.13
より,
造影剤を用いた場合,
血液が集 中している肝臓や心臓の識別が可能になっていることが分かる.
管電圧,
管電流を変化さ せた結果,
濃淡値が変化していることが分かる.
今回,
臓器のコントラストが良く出ている 管電圧90kV,
管電流160µA
でExiTron nano 6000
を用いて測定した結果を用いてマウス モデルを開発した.
図
3.5: X
線CT
画像(
造影剤なし, 90kV, 160µ A)
図
3.6: X
線CT
画像(
造影剤なし, 70kV, 180µ A)
図
3.7: X
線CT
画像(
造影剤なし, 50kV, 200µ A)
図
3.8: X
線CT
画像(ExiTron nano 6000, 90kV, 160µ A)
図
3.9: X
線CT
画像(ExiTron nano 6000, 70kV, 180µ A)
図
3.10: X
線CT
画像(ExiTron nano 6000, 50kV, 200µ A)
図
3.11: X
線CT
画像(ExiTron nano 12000, 90kV, 160µ A)
図
3.12: X
線CT
画像(ExiTron nano 12000, 70kV, 180µ A)
図
3.13: X
線CT
画像(ExiTron nano 12000, 50kV, 200µ A)
3.2.2 各部位の同定
今回
, Simpleware(
株式会社JSOL)
を用いてマウスの数値モデルを作成した.
図3.14
マ ウスモデルの作成手順のフローチャートを示す. X
線CT
画像は8bit
グレースケールで表 さされるため,
各ピクセルに0-255
の濃淡値が割り振られている.
この濃淡値に上限,
下限 の閾値を設けることによって,
任意の範囲の濃淡値を抽出できる.
抽出された領域につい て元のX
線CT
画像及びマウスの断面解剖図[11]
と比較を行い,
臓器の同定を行った.
同 定を行う際,
各臓器の位置関係や形状から抽出した部分がどの臓器に該当するか判断し,
断 面解剖図と比較することで形状や大きさに大きな違いがないか確認した.
また,
同定でき ない場合は濃淡値の範囲の変更や画像処理領域を限定することによって臓器の抽出を行っ た.
この作業を繰り返した結果,
骨,
血管,
心臓,
肺,
肝臓,
腎臓,
脳,
及びそれ以外のマウス を構成する部分を描出することができた.
表3.2
に部位ごとに設定した濃淡地の範囲を示 す.
また,
図3.17
に同定した組織の位置及び形状を示す.
図
3.14:
臓器同定の流れ図
3.15: X
線CT
画像(
胸部)
図3.16:
図3.15
の画像データから臓器を同 定した結果表
3.2:
各部位の濃淡値の抽出範囲 各部位 濃淡値の範囲骨
215-255
血管
188-288
心臓
196-224
肺
89-156
肝臓
174-224
腎臓
188-230
脳
144-200
その他
68-255
(a)
背側が表(a)
(c)
骨図
3.17:
同定した組織の位置及び形状図
3.18
にマウス全身のボリュームレンダリング,
表3.3
にマウスモデルの各パラメータ の比較を示す.
作成モデルは妊娠モデルに比べて,
解像度が上がり,
構成するボクセル数も 約60
倍になっていることが分かる.
また, X
線CT
画像を基にマウスモデル作成し,
マウ スの断面解剖図と比較し臓器を同定したため,
解剖学的に比較的妥当なマウスモデルを作 成することができた.
図
3.18:
作成したマウスの数値解析モデル表
3.3:
マウスモデルの各パラメータの比較従来モデル
[8]
作成モデル ボクセルサイズ[mm
3] 1 × 1 × 1 0.236 × 0.236 × 0.236
サイズ
[mm
3] 34×34×80 30.7×29.5×97.94
モデルを構成するボクセル数
27538 1591466
体重[g] 27.5 20.9
3.3 作成したモデルを用いたドシメトリ
3.3.1 3 次元インピーダンス法
体内誘導電界解析の計算手法として
3
次元インピーダンス法[7] [12]
を採用している. 3
次元インピーダンス法おいて,生体は各組織を模したボクセルで近似される.各ボクセル の辺に組織の導電率,誘電率から定義されるインピーダンスZ
による回路網を仮定し,磁 界が入射した際にセルの辺に流れるループ電流を求める.生体に100 kHz
帯の時間変動 する磁界が入射する場合,入射磁界の波長は生体に比べて非常に大きいため,生体内で磁 界の位相が変化しないと近似される.この近似は準静的近似と称される.ボクセルの各辺のインピーダンス
Z
は,生体組織を模した各ボクセルの導電率と誘電率により式
(3.1)
で定義される.Z = l
σ + jωε
rε
0S
l(3.1)
ここで
, σ, ε
rは各ボクセルに与えられた組織の導電率と比誘電率を示す. ε
0は真空の誘電 率を示す. l, S
l はそれぞれ辺の長さと,
辺が交差する面の面積を示す.
ボクセルの辺の長 さが一定である場合, S
l= l
2となる.導電率と比誘電率は生体組織毎に異なり,
周波数に よって変化する.
中間周波数帯では,
導電率と比誘電率に対して式(3.2)
が成り立つ.
σ ≫ ωε
rε
0(3.2)
本論文で扱うインピーダンス法では
,
誘電率は考慮しないものとする. Z = 1
σS (3.3)
各ボクセルに生じる誘導起電力は
,
各辺のインピーダンスと,
辺に接する4
つの面のルー プ電流から閉路方程式より導出できる.
一例として,
任意のボクセルのx-y
平面の誘電力+V
z(i, j, k) = 0 (3.4)
y-z, z-x
平面についても同様の式が成立する. x-y
平面に磁束密度B
zが鎖交したときの誘導起電力
Vz
はファラデーの法則により式(3.5)
のように記述される. V
z(x, y, z) = − δ
δt
∫ ∫
loop
B
z(x, y, z)l
2· dS (3.5)
よって
, x-y
平面での任意の面での誘導起電力は式(3.6)
で記述される.
V
z(i, j, k) = −jωB
z(i, j, k)l
2(3.6)
式
(3.4)
と式(3.6)
から回路方程式を立てる事ができる.
回路方程式を全ボクセルに対して連立方程式として解くことで
,
全ボクセルのループ電流が計算できる.
各ボクセルに流れ る電流は,
各方向のループ電流の合計値として求められる.
ボクセルの誘導電流密度は,
式(3.7)
のようにボクセルに流れる電流を面積で除して計算される.
誘導電界は式(3.8)
で記述される
.
J(i, j, k) = I(i, j, k)
l
2(3.7)
E(i, j, k) = J(i, j, k)
σ(i, j, k) (3.8)
3.3.2 マウスモデルの体重変更
体重によって電界の誘導量は変化するため
,
ドシメトリを行う際にマウスモデルはマウ スの体重に合わせる必要がある.
実験に用いた166
匹のマウスが実験最終日に7
週齢にな ることから,
その時の平均体重20.7g
になるようにボクセルの1
辺を変更した.
この時の 妊娠モデル及び作成モデルの各パラメータを表3.4
に示す.
表
3.4:
マウスモデルのパラメータ従来モデル
[8]
作成モデル ボクセルサイズ[mm
3] 0.909 × 0.909 × 0.909 0.235 × 0.235 × 0.235
サイズ
[mm
3] 30.9 × 30.9 × 72.7 30.6 × 29.4 × 94.0
モデルを構成するボクセル数27538 1591466
体重
[g] 20.7 20.7
値以下の体内誘導電界の平均値で評価している
. y
軸に沿う方向に1mT
の一様磁界をばく 露した時の計算結果を表3.7,
誘導電界の分布図を図3.19-3.21
に示す.
表3.7
より,
妊娠モ デル及び作成モデルの全身平均及び脳平均は近い傾向を示していることが分かる.
表
3.5:
一様磁界ばく露の計算条件周波数
[kHz] 85
磁束密度
[mT] 1
数値モデル 妊娠モデル・作成モデル 計算手法
3
次元インピーダンス法 残差ノルム10
(− 5)
表
3.6:
作成モデルの各組織の導電率番号 部位 導電率
[S/m]
0
空気0
1
その他0.362
2
骨0.084
3
血管0.319
4
心臓0.215
5
肺0.107
6
肝臓0.085
7
腎臓0.171
8
脳0.154
表
3.7:
一様磁界をばく露した際の平均誘導電界の比較 妊娠モデル 作成モデル全身平均
[V/m] 2.51 2.25
脳平均
[V/m] 1.85 1.60
図
3.19: y
軸に沿う方向の一様磁界による誘導電界分布(x = 65)
図
3.20: y
軸に沿う方向の一様磁界による誘導電界分布(y = 63)
図
3.21: y
軸に沿う方向の一様磁界による誘導電界分布(x = 200)
3.3.4 均一モデルによるドシメトリ
妊娠モデル及び作成モデルについて均一モデルを作成しドシメトリを行った
.
導電率は 各モデルの導電率の平均値を用いた.
作成した均一モデルのy
軸に沿う方向に1mT
の一 様磁界をばく露したいない誘導電界を算出した.
計算条件を表3.8,
表3.9
計算結果を示す.
表3.9
より,
表3.7
の全身平均と比較した際,
妊娠モデル及び作成モデルそれぞれおよそ近 い値になっていることが分かる.
表
3.8:
均一モデルによるドシメトリの計算条件周波数
[kHz] 85
磁束密度
[mT] 1
妊娠モデルの導電率の平均
[S/m] 0.299
作成モデルの導電率の平均[S/m] 0.326
計算手法
3
次元インピーダンス法 残差ノルム10
(− 5)
表
3.9:
均一モデルを用いて算出した平均誘導電界の比較 妊娠モデル 作成モデル全身平均
[V/m] 2.48 2.21
3.3.5 楕円体モデルによるドシメトリ
楕円体の簡易モデルを用いて理論的に平均誘導電界を算出し
,
均一モデルでのドシメト リ結果の妥当性を検討した.
図3.22
に使用した楕円体モデルの概要図を示す.
この楕円体図
3.22:
楕円体モデルの概略図モデルについて
, 3.3.4
と同様にy
軸に1mT
の一様磁界をばく露する.
楕円体モデルのパラメータ
a, b, c
は作成モデルを参考にし,
実験に用いたマウスの平均体重の20.7g
になるよう設定した
.
表3.10
に楕円体モデルのパラメータ及び計算条件を示す.
この楕円体の誘 導電界の平均値を求める式は以下のようになる[15] [16].
E
max= ωB
0c
2a
c
2+ a
2(3.9)
E
ave= 3 8 I
2√ 1 − a
2c
2E
max(3.10)
I
2=
∫
π0
√
1 − k
2sin
2θdθ (3.11)
k =
√ c
2− a
2c
2(3.12)
ここで
, E
maxは誘導電界の最大値, ω
は角周波数, B
0は磁束密度, E
aveは誘導電界の平均 値, I
2は第2
種完全楕円積分, k
は母数である.
計算した結果
,
誘導電界の平均値は2.45V/m
となった.
表3.9
と比較した際,
およそ近 い値になった.
このことから,
均一モデルで算出した体内誘導電界の平均値は妥当な値を 示していることが分かり,
同様に,
臓器を含む作成モデルの全身平均についても妥当な値 になっていることが分かる.
3.4 ばく露装置を模擬したドシメトリ
3.4.1 磁束密度の計算
ばく露装置を模擬した磁界ばく露シミュレーションを行った
.
本研究で使用している磁 界ばく露装置のコイル部は2
層ソレノイド構造であり,
内側は14
段,
外側は上下に6
段と なっている.
図3.23
に磁界ばく露用コイルの写真,
図3.24
にコイルの構造,
表3.11
に磁界 ばく露用コイルの設計パラメータを示す.
図
3.23:
ばく露装置の写真図
3.24:
コイルの構造表
3.11:
磁界ばく露用コイルの設計パラメータパラメータ 数値 パラメータ 数値 内側コイルの内径
110 mm
層数2
層 外側コイルの内径132 mm
銅線の外径6 mm
内側コイルの巻数14
巻 銅パイプの厚み1 mm
外側コイルの巻数6
巻 銅パイプのギャップ0.6 mm
有限要素法
(Finit Integration Method:FIT)
に基づく電磁界シミュレータ(
株式会社エー イーティー, CST EM Stdio)
用いて,
ばく露装置から生じる磁界密度分布を測定した.
表3.12
に計算条件,
図3.25
にコイルモデルを示す.
図3.26 ∼ 3.28
に,
ばく露装置から得られ る磁束密度分布を示す.
図3.26
にxy
平面,
図3.27
にyz
平面,
図3.28
にzx
平面の磁束密 度分布を示す. z
軸上の磁束密度の最大値は28.1mT
となった.
図
3.25:
シミュレーション上のばく露装置図
3.26:
磁界ばく露用コイルの磁束密度分布(xy
平面, Z = 105mm)
図
3.27:
磁界ばく露用コイルの磁束密度分布(yz
平面, X = 117mm)
図
3.28:
磁界ばく露用コイルの磁束密度分布(zx
平面, Y = 117.5mm)
表
3.13:
磁界ばく露装置が生じる磁界をばく露した時の体内誘導電界の計算条件周波数
85kHz
コイルに流す電流
(
実効値) 100A
計算方法 インピーダンス法 残差ノルム10
−5表
3.14:
ばく露装置から生じる磁界ばく露時の平均誘導電界の比較妊娠モデル 作成モデル
全身平均[V/m] 69.4 62.3
脳平均[V/m] 51.8 45.1
図
3.29:
ばく露装置から生じる磁界による誘導電界分布(x = 65)
図
3.30:
ばく露装置から生じる磁界による誘導電界分布(y = 63)
図
3.31:
ばく露装置から生じる磁界による誘導電界分布(x = 200)
3.5 結論
マウスの姿勢変形モデル作成の前段階として新たにマウスモデルの作成を行った
. X
線CT
を用いることによって,
骨,
血管,
心臓,
肺,
肝臓,
腎臓,
脳,
その他の8
つの部位で構成 された解剖学的に比較的妥当なモデルを作成することができた.
妊娠モデル及び作成モデ ルについて, 1mT
の一様磁界についてドシメトリを行った結果,
妊娠モデルの体内誘導電 界の全身平均は2.51 V/m,
脳平均は1.85 V/m
となり,
作成モデルの体内誘導電界の全身 平均は2.25 V/m,
脳平均は1.60 V/m
となった.
また,
各モデルの導電率の平均値を導電 率としたを均一モデルを作成し,
同様なドシメトリを行った結果,
妊娠モデルの体内誘導 電界の平均値は2.48 V/m,
作成モデルの体内誘導電界の平均値は2.21 V/m
となった.
さ らに,
作成モデルと体重及び形状が近い楕円体モデルを作成し,
同様な条件のもと理論的 に誘導電界の平均値を算出したところ, 2.45 V/m
となった.
このため,
作成モデルの均一 モデルについてドシメトリ結果が比較的妥当であることが分かった.
同様に作成モデルを 用いたドシメトリにおいて,
全身平均の結果は比較的妥当であることが示せた.
また,
作成 モデルを用いて,
磁界ばく露装置から生じる磁界によるドシメトリを行った結果,
全身平 均は62.3V/m,
脳平均は45.1V/m
となった.
今回作成したマウスモデルはその他に筋肉及び脂肪が含まれている
,
それぞれの導電率 は大幅に異なっているため,
それぞれを分けて同定したモデルを作成したモデルを検討す第 4 章 音ばく露装置の開発
4.1 音ばく露実験
実験に使用する磁界ばく露装置はソレノイド状コイルで構成されている
.
磁界と電流が 鎖交することによりローレンツ力によるコイルの振動及び磁歪が生じ,
超音波が発生する.
ばく露対象のマウスの最大可聴域は100kHz
程度であり,
マウスは超音波からストレス等 の影響を受ける可能性がある[18].
ばく露装置から生じる超音波がマウスにストレスを与 えた場合,
磁界起因の体内誘導電界による生体影響と分離して評価することが困難である.
超音波による生体影響を除去し,
磁界起因の体内誘導電界単体による生体影響評価を行う ために,
超音波のみのばく露実験を行う必要がある.
そこで,
対照実験を行うのに必要な超 音波ばく露装置の開発を行った.
超音波ばく露実験では,
磁界ばく露装置が生じる超音波 と同等な音圧レベルの超音波をマウスにばく露し,
生体影響評価を行う.
そのためばく露 装置を開発するにあたって,
磁界ばく露用コイルから生じる超音波の音圧レベルを測定し,
マウスが行動できる範囲内に得られた値と同等な音圧レベルの音場を生成する.
4.2 ばく露装置から生じる振動音の定量化
4.2.1 LDV を用いた音圧測定方法
ばく露装置は強い磁界を発生させるため
,
騒音計を用いて測定を行う場合,
コンデンサ マイクロホンに誘導電流が生じ測定結果に影響を及ぼす.
過去の研究では非接触で音圧を 測定するために,
レーザードップラー振動計(Laser Doppler Vibrometer : LDV)
を用いて 音圧を測定する研究が行われてきた[7].
図4.1
にLDV
を用いた音圧測定の概要図を示す.
光路上の屈折率はスピーチから放射される音場の分布と周波数によって変化する.
光路長Φ
Lは,
屈折率n
を距離で積分した式で定義され,
以下のような式になる.
Φ
L=
∫
L
ndx (4.1)
ここで
, L
はLDV
とミラーの間の距離である.
音波によって屈折率が微小に変化した場合,
屈折率の変化により光路長が変化する.
Φ
L+ ∆Φ
p(t) =
∫
L
(n + ∆n
p(x, t))dx (4.2)
図
4.1: LDV
を用いた測定の概要図 式(4.1)
及び式(4.2)
より,
∆Φ
p(t) =
∫
L
∆n
p(x, t)dx (4.3)
LDV
の測定値は振動速度v
LDV で与えられ,
測定値を積分すると以下の式になる.
∆Φ
L= v
LDV(t)
ω (4.4)
ここで
, ω
は各周波数である.
式(4.3), (4.4)
より, v
LDV(t)
ω =
∫
L
∆n
p(x, t)dx (4.5)
となる
.
気体の屈折率はGladstone-Dale
則により以下のように定義される. R
g= n − 1
ρ (4.6)
ここで
, R
gはGladstone-Dale
定数, ρ
は空気の密度である.
音波による空気の密度変化∆ρ
pによって,
屈折率が微小変化すると仮定した場合,
屈折率の微小変化∆n
pは式(4.6)
よ り以下のように表される.
∆n
p(x, t) = ∆ρ
p(x, t) · R
g(4.7)
ボイルの法則により,
空気の密度と気圧の関係しき式は以下のように表される.
W ρ = RT
P (4.8)
ここで
, W
は一般空気の分子量, R
は気体係数, T
は温度である.
音波の圧力の微小変化∆P
によって空気の密度の微小変化∆ρ
pが発生すると仮定した場合,
式(4.8)
より以下の ようになる.
∆P (x, t) = RT
W · ∆ρ
p(x, t) (4.9)
式
(4.7), (4.9)
より,
∆P (x, t) = RT
W · R
g· ∆n
p(x, t) (4.10)
光路上の屈折率の変化の空間的な平均
n
p(t)
は式(4.4)
より, n
p(t) = v
LDV(t)
ωL (4.11)
式
(4.10), (4.11)
より,
光路上の音圧の空間的な平均はP (t) = RT
W · R
g· v
LDV(t)
ωL = RT
W · R
gL ·
∫
L
∆n
p(x, t)dx (4.12)
となる.
SPL
となった.
磁界ばく露用コイルが生じる超音波の音圧レベルは環境音より小さいこと から,
測定にあたってロックインアンプを用いることで,
磁界ばく露用コイルの駆動周波数である
82kHz
の音を抽出した.
このとき参照信号はばく露装置と独立したファンクションジェネレータ
(
株式会社エヌエフ回路設計ブロック, WF1974)
から参照した.
測定パラ メータを4.1
に示す.
また表??
に測定結果を示す.
ばく露用コイルは64.4dB SPL
の超音 波を生じることが分かった.
図
4.2:
ばく露装置から生じる超音波の音場測定の概略図4.2.3 ばく露装置から生じる振動音のシミュレーション
磁界ばく露装置から生じる音圧レベルの指標を得るために
,
入力電流85 kHz, 100 A
での駆動を想定して数値シミュレーションを行った.有限要素法に基づくシミュレータCOMSOL Multiphysics(COMSOL.co)
によって,電磁界ー振動ー音響の連成シミュレーションを行った.シミュレーション上の数値モデルを図
4.3
を示す.
図4.4
にコイルの中心 軸上の音圧レベルの分布,
図4.5
にy = 0, z = 53
上の音圧レベルの分布を示す.
ここでy
表
4.1:
磁界ばく露用コイルから生じる超音波の測定パラメータ 気体定数R [Pa × m
3/K × mol] 8.31
実験環境の温度
T [K] 300
分子量
W [kg/mol] 0.028966
Gladstone-Dale
定数R
G[m
3/mol] 0.00000655
音波の周波数f [kHz] 82
光路長
L [m] 0.12
表
4.2:
磁界ばく露装置から生じる超音波の音圧レベル環境音
[dB SPL] 28.2
ばく露用コイルが生じる超音波
[dB SPL] 64.4
(a)2
次元モデル(b) 3
次元モデル 図4.3:
シミュレーション上のばく露用コイルCOMSOL 5.1.0.136
図
4.4:
コイルの中心軸上の音圧レベルCOMSOL 5.1.0.136
図
4.5: y = 0, z = 53
上の音圧レベル4.3 85kHz 対応スピーカーの音圧測定
4.3.1 スピーカーの配置決定
次にマウスが行動できる範囲内で
,
磁界ばく露用コイルの音圧レベルと同等な音圧レベル の音場をスピーカーを用いて生成する.
図4.6
にスピーカーの音圧レベル測定の様子を示す.
85kHz
の超音波を出力できるスピーカー(
テイクティ有限会社, TAKET-BATPRO2)
を用いて
,
磁界ばく露用コイルから生じる音圧レベルの超音波を出力した.
ここで, TAKET-
BATPRO2
を超音波スピーカーと呼ぶ.
表4.3
に超音波スピーカーによる音圧測定の結果を示す
.
測定点1-3
に比べて,
測定点4, 5
は音圧レベルが小さくなることが分かった.
図
4.6: 85kHz
の超音波が出力可能なスピーカーの概略図表
4.3:
スピーカーの音圧レベル[dB SPL]
の測定 測定点1 75.9
測定点
2 77.2
測定点3 74.1
測定点4 63.0
測定点5 50.5
の音場を生成できる超音波ばく露装置を作成することができた
.
しかし,
実際のばく露装 置にはばく露用コイルにマウスを入れるケージが設置してあるため,
ケージを考慮した音 圧レベルの測定及び音場の生成を行う必要がある.
図
4.7:
スピーカーを用いたばく露装置の概略図表
4.4:
スピーカーの音圧レベル[dB SPL]
の測定 マイクの向きA B
測定点
1 76.7 76.7
測定点2 79.0 65.5
測定点3 72.3 58.6
測定点4 66.3 76.9
測定点5 57.8 76.7
4.4 結論
本章では超音波ばく露装置開発の予備検討を行った
.
ばく露装置のケージを除いたばく 露用コイルが生じる超音波の音圧レベルを測定し,
その値を元にばく露装置の構築を行なっ た.
測定した結果,
結果ばく露装置のコイルから生じる超音波の音圧レベルは64.4dB SPL
となった
.
次に, 85kHz
の超音波を出力できるスピーカーについて音圧レベルの測定を行った
.
スピーカーを用いてマウスが行動できる範囲内で測定値を上回る値を出力できるか確 認を行った.
スピーカー1
つでは,
マウスが行動できる範囲内で音圧レベルを一様にする ことができなかった.
マウスが行動できる範囲内で音圧レベルがおよそ一様になるように,
スピーカーを2
つ直角に配置して音圧レベルの測定を行った. .
この配置により,
マウスが 行動できる範囲で測定値を超えるよな値を得ることができた.
したがって,
ケージを考慮 しない場合において、マウスが行動できる範囲で超音波ばく露実験を実施するのに十分な 音圧レベルを得ることができたことが示せた.
したがって,
設計したスピーカー配置で音 圧レベルを調節することにより,
ばく露用コイルが生じる超音波と同等な音圧レベルの超 音波ばく露装置を設計できる.
しかし,
実際の磁界ばく露装置にはマウスを入れるケージ が設置されている.
今後はケージを配置した状態で,
磁界ばく露装置が生じる超音波の測 定及び超音波ばく露装置の設計を行う必要がある.
を作成し
,
交絡因子を取り除くための超音波ばく露実験を行うために,
超音波ばく露装置 の開発の予備検討を行った.
X
線CT
を用いて,
骨,
血管,
心臓,
肺,
肝臓,
腎臓,
脳,
その他の8
つで構成した,
解剖学 的に比較的妥当なモデルを作成することができた.
妊娠モデル及び作成モデルについて, 1mT
の一様磁界をばく露した際の体内誘導電界を算出した.
また,
各モデルの均一モデに ついて同様な条件のもと体内誘導電界を算出した.
さらに,
作成モデルと体重及び形状が 近い楕円体モデルを作成し,
同様な条件のもと理論的に誘導電界の平均値を算出した.
こ れらの結果から,
作成モデルの均一モデルについてドシメトリ結果が比較的妥当であるこ とが分かった.
同様に作成モデルを用いたドシメトリにおいて,
全身平均の結果は比較的 妥当であることが示せた.
交絡因子を取り除くための超音波ばく露実験を行うために
,
超音波ばく露装置開発の予 備検討を行った.
マウスを入れるケージを設置していない条件のもと, LDV
を用いて磁界 ばく露用コイルが生じる超音波の音圧レベルを測定した.
直角に配置したスピーカーを用 いて測定値を超える音圧レベルの音場を生成した.
これにより,
音圧レベルを調節するこ とによって,
磁界ばく露用コイルと同等な音圧レベルの音場を生成した場合,
ケージを考 慮しない条件のもと,
超音波ばく露装置として用いることが可能であることを示した.
以上より
,
姿勢変更可能なマウスモデルの開発及び,
超音波ばく露装置の開発を行った.
マウスの姿勢を考慮したマウスモデルの開発および環境要因評価として超音波ばく露実験 を行うことは,
過去のin vivo
磁界ばく露実験では検討例がないため,
磁界起因の体内誘導 電界による生体影響評価の実現に貢献できたと考えられる.関連図書
[1] E.Litbak, K.R.Foster, and M.H.Repacholi. health consequence of exposure to electromagnetic fields in the frequency range 300 Hz to 10 MHz . Bioelectromag- netics, Vol. 23, pp. 6882, 2002.
[2] WHO. Environmental Health Criteria, Vol. 238. Geneva, World Hearth Organiza- tion, 2007.
[3] M.J.Wiley, et al. The effects of continuous exposure to 20-kHz sawtooth magnetic fields on the litters of CD-1 mice, Published in Teratology, Vol. 46, pp 391-398, 1992.
[4] I. Nishimura, et al. Lack of Teratological Effects in Rats Exposed to 20 or 60 kHz Magnetic Fields, Developmental and Reproductive Toxicology, Vol. 92, pp 469-477, 2011.
[5] H. J. Lee et al., Long-term exposure of Sprague Dawley rats to 20 kHz triangular magnetic fields, Int. J. Radiat. Biol., vol. 82, no. 4, pp. 285291, 2006.
[6] A. Ushiyama, et al., URSI AP-RASC, pp. 20302031, 2016.
[7]
吉野 創 平成28
年度 首都大学東京 修士論文. [8] DOI: 10.13099/VIP91204-01-0
[9] C.Gabriel. Compilation of the Dielectric Properties of Body Tissues at RF and Microwave Frequencies . Report N.AL/OE-TR- 1996-0037, 1996.
[10] D.Andreuccetti, R.Fossi, and C.Petrucci. An Internet resource for the calculation of the dielectric properties of body tissues in the frequncy range 10 Hz -100 GHz . http://niremf.ifac.cnr.it/tissprop/, 1997.
[11]
岩城隆昌,
山下廣,
早川敏之,
マウスの断面解剖アトラス,
株式会社アンドリー,
2001.
28
年3
月.
[15] . zen, S. mleki, and O. erezci, An Evaluation for Coupling of Human to Mag- netic Fields in Human Ellipsoidal Models with Frequency up to 100kHz Report Documentation Page, 2001.
[16] W. T. Kaune, J. L. Guttman, and R. Kavet, Comparison of coupling of humans to electric and magnetic fields with frequencies between 100 Hz and 100 kHz., Bioelectromagnetics, vol. 18, no. 1, pp. 6776, 1997.
[17] K. Matsubara, et al, IFEEC 2017-ECCE Asia, Vol. 3, pp. 412416, 2017.
[18] W. I. ACTON., ULTRASONICS, pp. 124-128, 1974.
謝辞
本研究を進めるにあたり
,
日頃から研究の方針や課題の解決方法だけでなく、研究報告 資料や発表資料の作成についてなど、非常に数多くの御指導や御指摘、御助言を熱心にし て下さった鈴木 敬久教授に心より感謝致します。休日や早朝、夜遅くなど、大変お忙し い中や御体調が優れない中でも研究について親身になって受け答えをして下さりました。研究面だけではなく
,
物事の取り組み方や考え方など様々な部分を学ぶことが出来ました.
本当にありがとうございました.
X
線CT
撮影の際に,
マウスの扱いや麻酔造影剤の投与をしていただいた国立保健医療 科学院の牛山 明先生に心より感謝いたします.
マウスモデル作成にあたって,
御助言,
御 指摘を頂いたり,
臓器の同定に使用したマウスの解剖学的断面図アトラスを提供して頂き ました.
磁界ばく露用コイルから生じる超音波測定の際にご協力していただいた明治薬科大学の 大谷 真氏に心感謝いたします
.
実験施設を案内してくださったり,
生体影響評価方法につ いてご指導していただきました.
大変お世話になりました.
X
線CT
撮影にご協力していただいた杏林大学の満田 真吾先生に心より感謝いたしま す.
満田先生のご協力によりX
線CT
をお借りすることができ,
撮影をすることが出来ま した.
磁界ばく露装置に携わった和田 圭二准教授
,
松原 壱樹氏に心より感謝致します.
磁界ば く露装置の構造について丁寧にご教授頂きました.
本研究を進めるにあたって
,
様々な御助言を下だいた吉野 創氏に心より感謝いたします.
本研究では吉野氏の研究成果を用いている部分が多く,
またその研究について親身にご教 授していただきました.
超音波ばく露装置の開発の研究にご協力していただいた牧野 佳氏に心より感謝いたし ます
.
自身の研究活動がお忙しい中,
実験等にご協力していただき有難うございました.
同じ電磁環境工学研究室の同輩である山本 達也氏
,
萩原 真輝氏,
伊東 直樹氏に心より 感謝いたします. 3
人のおかげで充実した大学院生活を送ることが出来ました.
最後に

![表 3.1: 妊娠モデルの各パラメータ [8] ボクセルモデル [mm 3 ] 1 × 1 × 1 サイズ [mm 3 ] 34 × 34 × 34 マウス全身を構成するボクセル数 27538 体重 [g] 27.2 この妊娠モデルについて , 解剖学的に問題がないかマウスの断面解剖図アトラス [11] と 比較を行なった](https://thumb-ap.123doks.com/thumbv2/123deta/10130767.1964655/9.892.247.596.168.287/パラメータボクセルモデルボクセルについて解剖学的アトラス.webp)

![表 3.3: マウスモデルの各パラメータの比較 従来モデル [8] 作成モデル ボクセルサイズ [mm 3 ] 1 × 1 × 1 0.236 × 0.236 × 0.236 サイズ [mm 3 ] 34×34×80 30.7×29.5×97.94 モデルを構成するボクセル数 27538 1591466 体重 [g] 27.5 20.9 3.3 作成したモデルを用いたドシメトリ 3.3.1 3 次元インピーダンス法 体内誘導電界解析の計算手法として 3 次元インピーダンス法 [7] [12] を採用している](https://thumb-ap.123doks.com/thumbv2/123deta/10130767.1964655/17.892.167.672.205.333/マウスモデルボクセルサイズインピーダンスインピーダンス.webp)
![表 3.7: 一様磁界をばく露した際の平均誘導電界の比較 妊娠モデル 作成モデル 全身平均 [V/m] 2.51 2.25 脳平均 [V/m] 1.85 1.60 図 3.19: y 軸に沿う方向の一様磁界による誘導電界分布 (x = 65) 図 3.20: y 軸に沿う方向の一様磁界による誘導電界分布 (y = 63)](https://thumb-ap.123doks.com/thumbv2/123deta/10130767.1964655/21.892.262.582.273.351/一様磁界ばく露し平均誘導電界モデルモデル脳平均によるによる.webp)
