日機連 18 先端- 3
平成18年度
マルチバンドレーザプロファイラに関する 調査研究報告書
平成19年3月
社団法人 日 本 機 械 工 業 連 合 会
財団法人 資源探査用観測システム
序
我が国機械工業における技術開発は、戦後、既存技術の改良改善に注力することから始 まり、やがて独自の技術・製品開発へと進化し、近年では、科学分野にも多大な実績をあ げるまでになってきております。
しかしながら世界的なメガコンペティションの進展に伴い、中国を始めとするアジア近 隣諸国の工業化の進展と技術レベルの向上、さらにはロシア、インドなどBRICs諸国 の追い上げがめざましい中で、我が国機械工業は生産拠点の海外移転による空洞化問題が 進み、技術・ものづくり立国を標榜する我が国の産業技術力の弱体化など将来に対する懸 念が台頭してきております。
これらの国内外の動向に起因する諸課題に加え、環境問題、少子高齢化社会対策等、今 後解決を迫られる課題も山積しており、この課題の解決に向けて、従来にも増してますま す技術開発に対する期待は高まっており、機械業界をあげて取り組む必要に迫られており ます。
これからのグローバルな技術開発競争の中で、我が国が勝ち残ってゆくためにはこの力 をさらに発展させて、新しいコンセプトの提唱やブレークスルーにつながる独創的な成果 を挙げ、世界をリードする技術大国を目指してゆく必要があります。幸い機械工業の各企 業における研究開発、技術開発にかける意気込みにかげりはなく、方向を見極め、ねらい を定めた開発により、今後大きな成果につながるものと確信いたしております。
こうした背景に鑑み、当会では機械工業に係わる技術開発動向等の補助事業のテーマの 一つとして財団法人資源探査用観測システム・宇宙環境利用研究開発機構に「マルチバン ドレーザプロファイラに関する調査研究」を調査委託いたしました。本報告書は、この研 究成果であり、関係各位のご参考に寄与すれば幸甚です。
平成19年3月
序
我が国では、これまで多くの地球観測衛星を打ち上げ、それを運用することによっ て地上からは得られない衛星からの画像データの提供を行ってきております。当財団 でも、1992 年に打ち上げられた JERS-!搭載の OPS、SAR を始めとして、ADEOS 搭載 IMG、
米国 Terra 搭載 ASTER さらに昨年 1 月に打ち上げに成功した ALOS 搭載の PALSAR 等多 くの地球観測センサを開発し、地球環境の継続的な監視、災害時のグローバルな状況 把握に貢献してきています。
人工衛星により取得した地球観測データを用いて様々な解析を行うリモートセンシ ングは、環境保全及び水資源の有効利用の観点から、河川部、海域等における水深、
地質等のデータのニーズも高まってきているものの、従来の光学センサでは、水面下 の情報収集が困難であり応用が制限されてきていました。本研究報告では、水面下の 情報を高精度かつ定量的に取得するため、高さ方向の情報を高精度に得ることができ る光学系能動型リモートセンサに着目し、水中での波長のレーザを用い透過率がよく、
海底、河川等の帯水土壌域の地形把握等が可能なレーザプロファイラとして、水中で の減衰の少ない海底測定用青色系レーザ(530nm-YAG2 倍高調波)および海表面測定用の 2 バンドを有するレーザプロファイラを中心とした調査研究を行ったものです。
本報告書にまとめられた調査結果が、今後衛星搭載レーザプロファイラの開発を行 うに際しての仕様設定において有用なデータを提供することができれば幸いです。
最後に、当財団法人資源探査用観測システム・宇宙環境利用研究開発機構に対して、
本調査研究の機械を提供いただいた、社団法人日本機械工業連合会、日本自転車振興 会ならびに関係の方々に厚く御礼申し上げます。
平成19年3月
目次
事業運営組織 1
総論 2
1.調査目的 3
2.調査内容 3
3.調査結果 5
各論 0-1
1. はじめに 1-1
2. マルチバンドレーザプロファイラの利用用途調査 2-1
3. レーザ発信器の可能性調査 3-1
4. マルチバンドレーザプロファイラのシステム検討 4-1
5. 技術課題の抽出、評価 5-1
6. 産業化への方策検討 6-1
7. まとめ 7-1
事業運営組織
マルチバンドレーザプロファイラに関する調査研究 委員会 名簿
氏名 所属
委員長 浅井 和弘 東北工業大学 工学部
委員 松本 良浩 海上保安庁 海洋情報部 技術・国際課 海洋研究室 委員 瀬戸島 政博 国際航業(株) 技術センター 瀬戸島研究室
委員 羽藤 正実 資源・環境観測解析センター 技術一部 (財)資源探査用観測システム・宇宙環
境利用研究開発機構(JAROS)
マルチバンドレーザプロファイラに 関する調査研究委員会
NEC東芝スペースシステム(株)
(株)地球科学総合研究所 (社)日本機械工業連合会
<総論>
1.調査目的
人工衛星により取得した地球観測データを用いて様々な解析を行うリモートセンシング は近年急速に拡大しつつある分野であり、石油資源・鉱物資源等の探査、温暖化ガス排出 等の環境観測、災害監視、農林水産等の分野において国内外問わず幅広く地球観測データ が利用されている。
一方、環境保全および水資源の有効利用の観点から、河川部、海域等における水深、地 質等のデータのニーズも高まってきているものの、従来の光学センサでは、水面下の情報 収集が困難である。このため、高さ方向の情報を高精度に得ることができる光学系能動型 リモートセンサが着目されつつあり、一部、航空機搭載型で活発に利用されているが、既 に実用化されている能動型レーザプロファイラの多くは、He-Ne ガスレーザ光(633nm)、半 導体レーザ光(約 800nm)あるいは YAG 固体レーザ光(1,060nm)を用いており、いずれも水中 での透過率が悪く、海底、河川等の帯水土壌域の地形把握等が不十分である。よって、水 面下の情報を高精度かつ定量的に取得するため、能動型光学センサの活用範囲の拡大に不 可欠な「マルチバンドレーザプロファイラ」を開発する必要がある。
本調査研究では水中での減衰の少ない海底測定用青色系レーザ(530nm-YAG2 倍高調波) および海表面測定用の 2 バンドを有するレーザプロファイラを中心とした調査研究を行う ことによって、これまで需要があるにもかかわらず参入が困難であった沿岸域での水深の 測定への新規リモートセンシング技術適用の方向性を示すことを目的として実施した。
2.調査内容
(1) 技術動向調査
国内外におけるマルチバンドレーザプロファイラの研究開発に関して、その技術動向調 査を実施する。具体的には、現在検討されているレーザ光の波長の選択、実用化技術、シ ステム構成についての調査および使用用途についての調査を実施した。
NASA EAARL - Airborne lidar system for high-resolution submerged and sub-aerial topography
Coastal CRC (Australia) Coastal Water Habitat Mapping (CWHM) project DEPOL04(France)
1-2) レーザ発信機の可能性調査
前項で調査を行った用途に使用可能性のあるレーザの技術開発動向につい て調査を行った(YAG2 倍高調波、XeCl レーザ等)。
調査した項目
レーザ:NdYAG(水深測定等)、XeCl レーザ(ラマン散乱利用等) 等々 性能:発信波長、出力パワー、繰り返し周波数、消費電力 等々 1-3) レーザプロファイラシステム検討
光学系、信号処理も含めた、マルチバンドレーザプロファイラのシステムの 概略検討を行い、航空機搭載用、衛星搭載用としての可能性、性能諸元を まとめ、実現の可能性を検討した。
検討内容 水深測定
(2) 技術課題の抽出・評価
(1)項の調査をもとに、衛星リモートセンサに適用していくための技術課題の抽出・
評価を行った。現在航空機搭載用としては、(1)1-1)項での調査対象等複数のプロジェク トが実行されているが、さらに衛星搭載するには、発信機光電力、繰り返し周波数、アイ セーフ等の問題が存在する。衛星搭載用のレーザプロファイラを実現するに必要な、発信 器等基本要素に要求される性能を検討し、技術動向の調査結果を基に衛星搭載用マルチバ ンドレーザプロファイラの課題を抽出し、その実現可能性の評価を行った。
上半期 下半期 半期別・月別
項目
H18
7 8 9 10 11 12
H19
1 2 3 1.技術動向調査
1)使用用途調査 2)レーザ発信機調査 3)システム検討
2.技術課題抽出・評価
3.産業化への方策検討
4.委員会開催 ○ ○
⑤報告書作成、公表
3.調査結果
(1) 技術動向調査
1-1) マルチバンドレーザプロファイラ使用用途調査
マルチバンドレーザプロファイラは水中での損失の少ない緑色を用いた水深測定 用、蛍光を利用した油膜の検出用に航空機搭載、ヘリコプタ搭載システムが開発 されている。
① 水深測定
EAAL(NASA)、Coastal CRC(Australia)および海上保安庁等で、水路の監視、沿
NASA、フランスおよび海上安全研究所等で、海上に流出した油膜の検出用の蛍 光レーザプロファイラが開発されている。
航空機あるいはヘリコプタ搭載での監視が可能となり機動性の向上、夜間測定 が可能等のメリットがある。
蛍光を利用した方式としてはクロロフィルの計測等海中の有機物観測例もある
。
1-2) レーザ発信器の可能性調査
レーザプロファイラに適用可能性のある Nd:YAG レーザ、エキシマレーザ等の 調査を行った。レーザプロファイラ用として必要な条件は波長、短パルス幅発振、
光ピークエネルギ、安定なプロファイル、放熱性である。これらを考慮した場合 水深測定用には Nd:YAG レーザが適しており、蛍光利用に必要な紫外レーザに関 しては消費電力、機器重量等の課題がある。
1-3) レーザプロファイラシステム検討
衛星搭載水深測定を対処とし、可能性検討を行った。レーザ送信エネルギ 100mJ、パルス幅 10ns、混濁していない海水を想定した場合 10m~20m 程度の水 深測定の可能性がある。
(2) 技術課題の抽出・評価
蛍光利用の場合はレーザ光源のリソースに課題があり衛星搭載には適さないと考えら れる。水深測定に関しては混濁していない場合で10m~20m程度の深さまで測定の可能 性があるが、以下の課題が残っている。
地表サンプリング間隔
レーザ発信器の繰り返し周波数に制約があり40Hzとした場合サンプリング間隔は 約180mとなる。
アイセーフ
(1)1-2)で想定した100mJの電力の場合、地上の人間に対するアイセーフ制約を 考慮するとビーム径を約300mにする必要があり、地表での空間分解能への制約と なる。
マルチバンドレーザプロファイラは、水深測定等海域の監視、蛍光の利用等での対象物 の特性の把握等多様な用途が期待でき、航空機搭載、衛星搭載によりリーモーとセンシン グの応用範囲の拡大が期待できる。
ただし、衛星搭載に関しては、サンプリング間隔、アイセーフ等の制約があり実用化に 向けて以下のような方策を検討する必要がある。
航空機搭載、ヘリコプター搭載による利用技術の向上
イメージャとの併用、サンプリング的な情報からの全体把握等の解析手法の向上 レーザ発信器の効率、発振波長の多様化等
<各論>
1.はじめに
マルチバンドレーザプロファイラは、2波長のレーザを使用することにより、水深測定 を可能にする等多様な利用が可能になる。本調査研究報告では、航空機搭載型での水深測 定、蛍光利用での実施例について利用用途、効果、実施機関の調査を行うとともに、衛星 搭載への可能性調査として、レーザ発信器の調査、衛星搭載型レーザプロファイラの実施 例、マルチバンドレーザプロファイラの衛星搭載への可能性の検討を行い、今後の実用化 に向けての開発課題をまとめた。
2.マルチバンドレーザプロファイラの利用用途調査
マルチバンドレーザプロファイラを用いた海底調査水深測定用を主とし、その他蛍光利 用等の可能性のあるレーザプロファイラの使用用途についての文献調査を実施した。
2.1 2波長レーザプロファイラ
2.1.1 2波長レーザプロファイラの開発
Airborne Laser Hydrography (ALH)あるいはAirborne Laser Bathymetry (ALB) と呼ば れる,水域での調査を目的とした航空機搭載用レーザシステムの開発は, 1960年代後半か ら始まった。図2-1にレーザによる測深調査の概念を示す。
1970年代から1980年代には,米国,スウェーデン,オーストラリア,カナダなどで,特 に軍事的な機関が中心となり,米国,スウェーデン,カナダの開発にはOpotech社(カナダ)
が,オーストラリアにおける開発では,同国のTexnix社が関わり,実験的な研究開発が進 められた。1990年代には,それぞれ実用機の段階に入り,現在の利用されているシステム となっている。
米国 : SHOALS
スウェーデン : FLASH ⇒ HawkEye カナダ : LAESEN-500
オーストラリア : WERLADS ⇒ LADS ⇒ LADS MK II
NASAを中心とした開発は,Airborne Oceanographic Lidar (AOL) により様々な実験が行 われ,現在は, AOLでの経験に基づき開発されたExperimental Advanced Airborne Research Lidar (EAARL)により研究的な運用がなされている。
現在では, Opotech社のSHOALS とTexnix社のLADS MK IIが商用機として運用されて,
世界各地における浅海域での海図の更新,沿岸環境のモニタリングに利用されている。そ れらのシステムは, Nd:YAGによる近赤外レーザを用いて,1064nm(近赤外)とその2倍高 調波の532nm(緑色)により,浅海域における水深測定を行うセンサである。
2.1.2 2波長レーザプロファイラシステム
2波長を用いた主な測深調査用のレーザプロファイラを表2-1に示し,以下にそれらのシ ステムについて簡単に記述する。
(1) Laser Airborne Remote Sensor 500 (LARSEN-500)
Laser Airborne Remote Sensor 500 (LARSEN-500)は,Canada Centre for Remote Sensing (CCRS),Canadian Hydrographic Service,Optech社(Optech Incorporated)により開発さ れたシステムで,1985年からカナダ沿岸の調査に用いられている。表2-2は,LARSEN-500の 諸元である。
(2) Scanning Hydrographic Operational A近赤外borne Lidar Survey (SHOALS)
Scanning Hydrographic Operational Airborne Lidar Survey (SHOALS)は,1988年にU.S.
Army Corps of Engineer (USACE)のプログラムとして開発が始まった。1994年に初めて運 用されて以降,様々な改良が重ねられた。表2-3に主要な諸元を,図2-2にはTwin Otter機 に取り付けたSHOALSと機内のオペレータコンソールを示す。SHOALSは,図2-3に示すように 進行方向に弧を描くスキャンニングパターンを持っている。
現在では,SHOALSには幾つかのモデルが開発されOptech社が商用センサとして販売し 様 々 な 機 関 で 運 用 さ れ て い る 。 表 2-3 に あ る Laser Pulse Rate が 1000Hz の モ デ ル が SHOALS-1000,3000HzのモデルがSHOALS-3000と呼ばれている。日本では海上保安庁が SHOALS-1000を導入し海図作成のための測深調査を行っている。
(3) HawkEye
スウェーデンの軍事研究所(Swedish Defense Research and Development Agency)は,
1980年代にFOA Laser Airborne Sounder for Hydrography (FLASH)と呼ばれるレーザプロ ファイラの試作機を開発し様々な実験を行った。その技術を継承し開発されたシステムが
商用機としてTexnix LADS社により開発,運用がなされている。表2-5にLADS Mk IIの諸元 を示す。
(5) Experimental Advanced Airborne Research Lidar (EAARL)
Experimental Advanced Airborne Research Lidar (EAARL)は,NASAにおいて1970年代後 半から1980年代にかけて開発されたAirborne Oceanographic Lidar (AOL)の技術に基づき 開発されたセンサである。表2-6に諸元を示す。Nd:YAGによる近赤外レーザを用いて,1064nm
(近赤外)とその2倍高調波の532nm(緑色)により,沿岸域における水深および陸域の標 高の計測を行うことができる(図2-4)。
2.1.3 2波長レーザプロファイラの利用
(1) 水深計測の原理
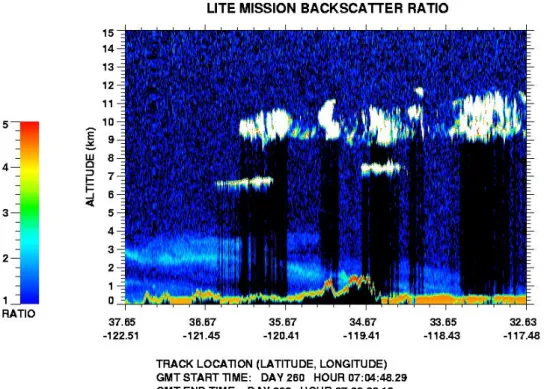
図2-5は,様々な海水における可視~近赤外の電磁波の減衰係数(海水面から10mまで)を 示したものである(Northam et al., 1969)。この図から,外洋と沿岸域では減衰係数の波 長依存性がやや異なっていることが分かる。外洋では青色の光の波長が,沿岸域では緑色 が減衰係数の極小となる波長となっている。即ち,それぞれの水域で,最も水深の深いと ころまで到達できる波長帯が異なることになる。これは,外洋と沿岸域では海水に含まれ る物質が異なるためである。しかし,いずれの場合においても水をある程度透過できる波 長帯は主に可視域で,図からも分かるように赤外域に入ると減衰係数が非常に大きくなり ほとんど海水中に入り込むことはなくなる。したがって,海水の中や海底(浅海)からの情 報を得るために利用できる波長帯は可視域に限られることになる。
水深計測を行うためのシステムは, Nd:YAGによる近赤外レーザを用いて,1064nm(近赤 外)とその2倍高調波の532nm(緑)を利用し,近赤外と緑色のレーザによりそれぞれ海表面と 海底までの時間を計測し,その時間差から水深を算定する(図2-6)。図2-7は,緑色レーザ の観測波形を示したものである。緑色レーザの観測波形には,表面からの散乱波・体積散 乱波・底面からの散乱波が含まれる。図2-8は,水面および水中でのレーザの散乱の様子を 示したものである。緑色レーザには表面からの散乱波と体積散乱波が混在するため,緑色 レーザのみで表面位置の決定を精度良く行うことは困難となる。そこで,海水中の浸透し ないIRレーザの表面からの散乱波を表面位置の推定に用いる考え方が2波長レーザによる 水深計測の原理となる。しかし,近赤外レーザは水面近くの霧や障害物により散乱される こともあり,必ずしも水面を捉えるとは限らない。そこで,緑色レーザで励起される水の ラマン散乱光を観測するシステムも開発されている。ラマン散乱光の存在は水表面からの 散乱であることを示し,より水面位置を精度よく決定することができる。SHOLASは赤色の 波長帯(645nm)でそのラマン散乱を受光し,水面の位置決定精度を向上させている。
(2) 2波長レーザプロファイラによる水深計測
・ 陸域の含めた水深・標高調査
・ 船舶調査に危険が伴う地域における調査
航空機レーザプロファイラの限界
・ 測深可能な深度が水の透明度に依存(最大50mくらい)
・ 海底面上の小さなもの(1m立法程度)の検知が困難
(3) 2波長レーザプロファイラの利用
2波長の航空機搭載用レーザプロファイラは,低コストで広域を短期間で測深調査できる ことから,主要な利用分野は,
・ 広域の海図更新
・ 港湾環境の調査 であるが,そのほかにも,
・ 沿岸環境のモニタリング
・ サンゴ礁のモニタリング
・ 災害時の調査
・ 海底敷設物に関わる調査
・ 石油天然ガス開発に関わる調査
米国では,USACE,NOAA,USGSなど,オーストラリアでは,Coastal CRCなどの政府機関 が積極的な利用を行っている。U.S. Army Corps of Engineer (USACE)では,JALBTCX (Joint Airborne Lidar Bathymetry Technical Center of Expertise)と呼ばれるプロジェクトに お い て , 沿 岸 域 を 総 合 的 な 調 査 を 行 う た め に 複 数 の セ ン サ を 組 み 合 わ せ た Compact Hydrographic Airborne Rapid Total Survey (CHARTS)と呼ばれるシステムの運用を行って いる。CHARTSは,測深用のレーザシステムのほか,デジタルカメラ,ハイパースペクトル センサなど,以下のセンサにより構成されている。
・ Lidar : SHOALS 300T20-E (Optech)
・ Digital Camera : DT4000 (DuncanTech)
・ Hyperspectral : CASI-1500 (ITRES)
図2-10は,SHOLASによる米国東海岸 Nuctucketにおける浅海調査の事例である。河川の
図2-12は,沿岸の堆積物(海底下の砂)の維持管理を行うためにUS Army Corps of Engineers Mobile District の も と で 実 施 さ れ た Regional Sediment Management Demonstration Program (RSMDP)の位置図(メキシコ湾岸地域)とフロリダの沿岸部の航空 写真である。SHOLASによる河口域の測深調査が複数年(1995~1997)にわたり実施され(図 2-13),それに調査結果に基づき,海底面における堆積・侵食の評価が行われた(図2-14)。
図2-15は,US Army Corps of Engineers (USACE)による災害調査の事例である。1995年 10月にフロリダを襲ったハリケーンOpalにより海底の状況を早急に把握し,航路の確保が 必要とされた。SHOALSにより,3km2の地域を1時間のデータ取得を,6時間以内に航路の確保 作業に必要とされるベースマップの作成が行われた。
図2-16は,USGS/Grand Canyon Monitoring & Research Centerによるグランドキャニオ ンにおける河川堆積物の調査プロジェクトの中で,SHOALSによる河床地形のマッピングが 行われた事例である(Miller et al., 2005)。河川の場合,堆積物による混濁のため水の透 明度の低く,浅海域に比べ測深調査は難しいとされている。
これまでの事例はレーザプロファイラによる測深の事例であるが,Optech社では,図2-17 に示すような観測されるレーザ強度から海底面のイメージングを試みている(Tuell, 2005)。
図2-17は,レーザ光とほぼ同じ波長帯で取得されたハイパースペクトルセンサCASIの海底 面の反射率画像と比較したものである。
図2-1 レーザによる測深調査の概念 (Measure, 1984)。
表2-1 主な測深調査用のレーザプロファイラ。
System Fullname Wavelength
(nm) Organization (Operation) Organization (Manifacture) Year
LARSEN-500 Laser Airborne Remote Sensor 532 1064
1) Terra Surveys
Canada Centre for Remote Sensing (CCRS) Canadian Hydrographic Service
Optech Incorporated 1985
SHOALS
Scanning Hydrographic Operational Airborne Lidar Survey
532 1064
1) United States Army Corps of Engineers (USACE)
2) Japan Coast Guard Optech Incorporated 1994
HAWKEYE 532
1064 1) Swedish Hydrographic Department / Swedish Navy Optech Incorporated
SAAB Dynamics 1994
LADAS Mk II Laser Airborne Depth Sounder 532 1064
1) Australian Hydrographic Service
2) Tenix LADS Corporation Tenix LADS Corporation 1998
EAARL Experimental Advanced Airborne Research Lidar
532 1064
1) Natinal Aeronautics and Space Administration (NASA)
U. S. Geological Survey (USGS)
NASA Wallops Flight Facility 2001
表2-2 LARSEN-500の諸元 (Karmar, 2002)。
Laser Nd:YAG (532nm, 1064nm)
Repetition rate 20 Hz
Swath 270 m ( from 500 m altudude)
Spacial interval 30m
Maximun depth 40 m
Acuuracy 0.3 m
表2-3 SHOALSの諸元。
図2-3 SHOALSのスキャンニングパターン (Irish, 2000)。
表2-4 Hawkeyeの諸元 (Baltsavias, 1999)。
Laser Nd:YAG (1064nm, 532nm)
Oeganization Swedish government
Manifacture Saab Dynamics and Optech
Pulse rate (kHz) 0 - 40
Puls width (ns) 7
Scan angle (degrees) 0.2
Scan rate (Hz) 0.3 - 7
Altidude range (m) 50 - 800 (200 - 300 typical)
Swath (m) 0 - 0.73 * altidude
Beam divergence (mrad) 2 - 15
Laser foot-print (m) 2.4
Across track point spacing (m) 1 - 15, 4 - 7 typical
Along track point spacimg (m) 4 - 7 typical
表2-5 LADS MK IIの諸元 (Baltsavias, 1999)。
Laser Nd:YAG (1064nm, 532nm)
Oeganization / Manifacture LADS Corp. Ltd.
Pulse rate (kHz) 27
Scan angle (degrees) 0.9
Scan rate (Hz) 18
Altidude range (m) 366 or 500
Swath (m) 0.48 * altidude
Across track point spacing (m) 30 / 15
Along track point spacimg (m) 30
表2-6 EAARLの諸元 (Wright et al., 2002)。
図2-4 EAARLの観測の概念
(http://coastal.er.usgs.gov/remote-sensing/advancedmethods/ea arl.htm)。
図2-5 海水における可視~近赤外の電磁波の減衰係数(海水面から10mまで) (Northam et al., 1969)。
図2-6 2 波 長 レ ー ザ プ ロ フ ァ イ ラ に よ る 水 深 計 測 の 概 念 (LaRocque and West, 1999)。
図2-7 緑色レーザの観測波形 (LaRocque and West, 1999)。
図2-8 水 面 お よ び 水 中 で の レ ー ザ の 散 乱 の 様 子 (LaRocque and West, 1999)。
図2-9 航空機レーザプロファイラによる測深調査と既存の船舶調査 (Banic and Cunningham, 1998)。
図2-10 SHOLASによる米国東海岸 Nuctucketにおける浅海調査 (Millar et
図2-12 沿岸の堆積物の維持管理プロジェクトの位置図 (Wozencraft and
図2-13 SHOALSによる海底地形と層厚図 (Wozencraft and Irish, 2000)。
positive banance negative
Sediment Budget Analysis
1 2 3 4 5 6
1995-1996 X X -8.3 -10.8 X X 1996-1997 -13.4 -5.2 -11.8 -1.2 -1.7 -8.0
堆積物(砂)の増減(x1000m 3 )
図2-14 海底面における堆積・侵食の評価 (Wozencraft and Irish, 2000)。
図2-15 SHOALSによる災害調査 (USACE, 2000)。
2.2 蛍光レーザプロファイラ
2.2.1 蛍光レーザプロファイラの開発
1960年代の終わり頃,海洋,湖,河川における流出油による環境汚染が問題視されはじ め,流出油を検知する手段の研究のきっかけとなった。航空機リモートセンシング分野の 技術開発として,流出油の検知を目的とした新しいセンサが注目され始めた。蛍光レーザ センサ“laser fluorosensor”と呼ばれるシステムである。図2-18は,1970年代の前半に カナダで開発されたUniversity of Toronto, Institute for Aerospace Studies (UTIAS) のlaser fluorosensorをCanada Centre for Remote Sensing (CCRS)のDC-3に搭載したとこ ろである。図2-19は,蛍光レーザによる観測の概念を示したものである。引き続く基礎的 な研究の結果,蛍光レーザにより流出油の分布域を把握できる可能性が示された。特に,
油濁防除の観点からは,夜間でも観測できる蛍光レーザは,24時間体制の緊急観測が可能 な技術として期待されるものとなった。
その後開発されたセンサの一つには,沿岸域での流出事故を想定した米国Coast Guardで 開発したヘリコプター搭載型で337nmのNitrogen laserを利用したものがある。様々な油の 蛍光スペクトルの観測実験が行われ,航空機リモートセンシングによる油の識別が可能で あることが示された。CCRSで開発された蛍光レーザシステムは,マルチチャネルで蛍光ス ペクトルの観測ができるものであった。 Nitrogen laser (337nm)を用い380~700nmを16チ ャネルで観測できるプロファイラが開発された。16チャネルのうち最初のチャネルは,水 のラマン散乱光(381nm)を観測するためのもので,最後のチャネルは,Chlorophyllによ る蛍光を観測するものであった(Measure, 1984)。
NASAでは海域観測用の航空機レーザシステムの開発に1970年代後半から取り組み,1977 年にはAirborne Oceanographic Lidar (AOL)と呼ばれるセンサによる様々な実験がはじめ られた。AOLには,地形計測や水深計測の機能のほかに,蛍光観測用の機能が装備され,海 洋での油膜観測,特に油膜の厚さの計測技術の開発が行われた。さらに,プランクトン量 の計測,海洋観測用の衛星センサSeaWiFSの解析アルゴリズムの開発・検証など,様々な研 究に利用された。AOLは,CCRSのものとは異なり,Nd:YAGの3次高調波(355nm)を利用した もので,370から740nmまでの蛍光スペクトルが観測できるものである。
2.2.2 蛍光レーザプロファイラシステム
蛍光レーザシステムの諸元をまとめたものを表2-7に示し,それぞれのシステムについて 簡単に以下に記述する。
(1) Laser Fluorosensor
CCRSで開発されたlaser fluorosensor Mk IIIは,表2-8に示す仕様のセンサである。図 2-20は光学系の概念図である。蛍光を励起するためのレーザには,Nitrogen laser (337nm) が用いられ,マルチチャネルで蛍光スペクトルの観測が可能である。1978年には,検証実 験としてニュージャージー沖で油を投機し観測する実験が実施された。図2-21は,観測結 果の例であるが,540から620nmに油に蛍光が観測されている。
(2) Airborne Oceanographic Lidar Flourosensor (AOL)
NASAでは,1970年代後半から海域観測用の航空機レーザシステムAOLの開発に取り組み 1977年から第1世代のAOLによる様々な実験がはじめられた。AOLには,蛍光観測のほかにも 地形計測や水深計測の機能が装備され総合的な海域観測が行えるシステムである。
AOLの蛍光観測機能はAOLFLと呼ばれ,油膜の厚さの計測技術の開発が行われた。さらに,
プランクトン量の計測,海洋観測用の衛星センサSeaWiFSの解析アルゴリズムの開発・検証 など,様々な研究に利用された。AOLは,CCRSのものとは異なり,Nd:YAGの3次高調波(355nm)
を利用したもので,370から740nmまでの蛍光スペクトルが観測できるものである。表2-9は,
AOLの蛍光観測機能の諸元である。また,図2-22はAOLの概観図と光学系を示したものであ る。AOLでは,油膜の厚さの計測技術が開発された。図2-23は観測実験での油膜厚のマッピ ング結果である。
(3) Fluorescent Lidar System (FLS)
Fluorescent Lidar System (FLS) シリーズは,Laser Diagnostic Instruments Ltd.が 商用に開発したものである。表2-10に示すように,スキャンニングの可否でFLS-AMとFLS-AU というシステムがある。XeCl Excimerによる308nmのレーザが用いられて,500チャネルの
Oceanographic Lidar System (OLS)は,ドイツのOldenburg大学で開発され,1980年代中 頃に海洋での油膜や海水中のプランクトン・溶解性有機物の研究に用いられたシステムで ある。表2-11にOLSの諸元を,図2-25に概観図を示す。
(5) Laser Flourosensor (LFS)
Laser Flourosensor (LFS)は,Oldenburg大学のOceanographic Lidar System (LFS)の技 術を継承し,同大学とDLRが共同で開発したものである。表2-12にOLSの諸元を,図2-26に 概観と光学系を示す。LFSはOLSと異なりスキャンキングが可能となり2次元のデータ取得を 行うことができるセンサである。図2-27はLFSのスキャニングパターンを示したものである
(Reuter et al., 1995)。
1994年ドイツのOptimare社が商用版LFSとしてImaging Airborne Laser Flourosensor (IALFS)が開発され(Gruner et al. 1996),第一号機はドイツ海軍の納められた(Karmar, 2002)。
(6) Laser Environment Airborne Fluorosensor (LEAF)
Laser Environment Airborne Fluorosensor (LEAF)は,カナダと米国の機関により共同 開発されたシステムで,1992年から運用されている。レーザ源にはXeCl Excimaer (308nm) を用い,322から655nmを60チャネルで蛍光スペクトルを取得できるものである。表2-13に LEAFの諸元を示す。
(7) Scanning Laser Environment Airborne Fluorosensor (SLEAF)
Scanning Laser Environment Airborne Fluorosensor (SLEAF)は,LEAFの後継としてカ ナダと米国により共同開発されたもので,スキャンニング機構を持ち,330から610nmを&4 チャネルで計測できる。レーザ源は,LEAFと同様,XeCl Excimaer (308nm)である。表3-8 に諸元を,図3-11にDC-3に搭載されたSLEAFの概観を示す。
を利用し蛍光を励起させ,最初の波長で水のラマン散乱光を観測,他の波長で蛍光を観測 するセンサである。観測の概念を図2-30に示す。図2-31は,油膜による蛍光がすべての波 長に蛍光が認められる観測事例である。海上技術安全研究所は,この蛍光ライダーにより フランス海軍が2004年5月に実施した油濁防除国際共同演習(DEPOL04)において,流出油 モニタリングを行っている。DELOP04(2004年5月)には6ヶ国が参加し,4回におよぶ油の 海洋放出と油濁防除の訓練に合わせて様々な航空機センサよる流出油モニタリングが実施 された(篠野・樋富,2006)。
2.2.3 蛍光レーザプロファイラの利用
当初の開発目的は,流出油の検知(分布域,種別,油膜厚)であるが,陸域への油汚染 やクロロフィル等を含む水質マッピングへと利用分野が拡大されつつある。以下では,油 膜の検知を中心にその原理や利用事例などについて簡単に記述する。
(1) 蛍光スペクトル
原油,重油,軽油などの石油類は,紫外線を当てると蛍光を発する。その蛍光は,油の 分子構造に由来しているため,油の種類により発光強度や波長スペクトルが異なる。した がって,流出油に紫外線レーザを照射し励起される蛍光スペクトルを観測することで,油 膜の有無だけでなく,その種類の識別も可能となる。図2-32は,室内測定された油の蛍光 スペクトルを示したものである。軽油は,370nm付近にピークをもつパターンを,重質の原 油になるほど,蛍光スペクトルのピークは長波長側に移り,発光強度も小さくなる。図3-16 は,ヘリコプター搭載型センサにより高度31~46mから取得された油膜の蛍光スペクトルで ある。API度の異なる油を観測したものである。API度は,American Petroleum Institute (API)が定めた石油の比重の表現法で,比重が大きいほど、API度は小さくなる。API度が高 いほどガソリンなどの軽い油種が多く取れる。図3-16の航空機からの観測においても室内 測定(図2-32)と同様の軽質油から重質油への傾向が認められる。
図2-32に示した様々な油の蛍光スペクトルは,Oldenburg大学によりカタログ化され,公 開されている(http://las.physik.uni-oldenburg.de/data/spectra/index.htm)。図2-34 にOldenburg大学のカタログを示し,そのカタログデータを図2-35に示す。カタログとして 公開されている油は,原油35種,重油類14種,その他3種である(図2-34)。Oldenburg大 学のデータは,蛍光スペクトルはPerkin Elmer Model 650-40 Sectrofluorometerにより,
吸収スペクトルはKontron UVIKON 810 Spectrophにより計測されている。レーザ光の波長 は,253,308,337,365nmである。各々のレーザ光に対する蛍光スペクトルの計測波長帯 は,260~699nm,320~699nm,340~699nm,370~699nmで,いずれも3nm間隔で測定が行わ れている。
海水中には,植物性プランクトン中のChlorophyll-aや有機溶解物なども蛍光を発する。
のである(Reuter et al., 1995)。スペクトルの類似度として表現している。Mediumから highの類似度で示される油膜が次第に広がりを見せていく様子が認められる。
(3) 水質および油汚染のマッピング
Estoniaで行われたLaser Diagnostic Instruments 社のFluorescent Lidar System (FLS) による水質および油汚染調査では,海域だけでなく陸域の油汚染地域のマッピングが行わ れている。図2-38は調査地域全域の位置図で,沿岸測線の調査プロファイル(海水の透明 度,腐食物,溶解性有機物)が示されている。図2-39は,海水の透明度,油汚染,溶解性 有機物のマッピング結果。油汚染は河口域に顕著に認められることが分かる。また,陸域 の油汚染調査(図2-40)では,顕著な汚染地域は鉄道沿いのオイルタンクの位置に一致し ていると報告されている(Samberg et al., 2005)。
Laser Diagnostic Instruments 社では,図2-41に示すような様々な対象物の蛍光スペク トルのパターンに基づき環境問題への利用を積極的に進めている。図2-42は同社のFLSによ るマッピングの概念を示したものである。
(2) 油膜厚の計測
流出油の分布域に加えて油膜の厚さが分かると流出量の算定が可能となり油濁防除の観 点からは,きわめて有効な情報となる。したがって,油膜厚の計測は蛍光レーザシステム の初期のころから研究がなされてきた。
Hoge et al.(1980)は,油膜厚の計測手法を提案している。水によるラマン散乱光の油膜 における減衰を利用した手法である。油膜における入射レーザ光の減衰係数k
e
,ラマン光の 減衰係数kr
と,観測される油膜と油膜のない水面からの信号強度から次式に基づき推定され る(図2-43)。⎟ ⎠
⎜ ⎞
⎝
⎛
− +
= R
R k
d k
r e
ln ' 1
ここで,R
’は油膜からの信号強度,
Rは油膜のない水面からの信号強度である(図2-44)。図2-46は,2004年5月に行われたフランス海軍による油濁防除国際共同演習(DELOP04)
においてモニタリングされた流出油のハイパースペクトルセンサの画像である。同演習で は油の海洋放出と油濁防除の訓練に合わせて航空機リモートセンシングによる流出油モニ タリングが実施された。図2-47は,FLSにより計測された油膜厚のマッピング結果である。
図2-18 UTIASのlaser fluorosensor (Measure, 1984)。
図2-19 蛍光レーザ観測の概念 (Measure, 1984)。
表2-7 蛍光レーザプロファイラの諸元。
System Fullname Lsaer
Transmitter Wavelength (nm)
Receiver Spectral range
(nm)
Number of
channels Organization Reference
LS Laser Flourosensor N2 337 386 - 690 20 CCRS O'Neil et al. (1980)
AOL FL Airborne Oceanographic
Lidar Flourosensor N2 337.1 350 - 800 40 NASA Hoge et al. (1980)
FLS AU Fluorescent Lidar
System AU XeCl Excimer 308 300 - 550 500 Laser Diagnostic
Instruments Ltd Babichenko et al. (2006)
FLS AM Fluorescent Lidar System AM
XeCl Excimer Dye
308 360, 460
tunable 250nm
window 500 Laser Diagnostic Instruments Ltd
Babichenko et al. (2006) Samberg et al. (2005)
OLS Oceanographic Lidar System
XeCl Excimer Dye
308 450/533
344, 366, 380, 450, 500, 533, 650, 685
8 Universiy of Oldenburg Hangstermann and Reuter (1990)
LFS IAFLS
Laser Flourosensor Imaging Airborne Laser Flourosensor
XeCl Excimer Dye
308 382
344, 330, 365, 380, 440, 470, 500, 550, 600, 650, 685
12 DRL / Universiy of Oldenburg
Reuter et al. (1995) Gruner et al. (1996)
LEAF Laser Environment
Airborne Fluorosensor XeCl Excimer 308
320 - 635 or 525 - 696
32 or 64
US / Canada Karmar (2002)
SLEAF
Scanning Laser Environment Airborne Fluorosensor
XeCl Excimer 308 330 - 610 64 US / Canada Brown et al. (1996)
Brown et al. (2001)
蛍光ライダー ヘリコプター搭載型 Nd:YAG(THG) 355 405, 436, 442,
486 4 (独)海上技術安全研究所 篠野他 (2005)
表2-8 CCRSのlaser fluorosensor の諸元(O’Neil et al., 1980)。
Transmitter
Reciever
図2-20 CCRSのlaser fluorosensor の光学系 (O’Neil et al., 1980)。
図2-21 CCRS のlaser fluorosensor で取得 され た油の 流出 実験の 観測 結果 (O’Neil et al., 1984)。
表2-9 AOLの諸元 (Hoge et al., 1980)。
(a) Elevation and pan view of AOL
図2-23 AOLによる油膜厚のマッピング (Hoge et al., 1980)。
表2-10 FLSの諸元 (Babichenko et al., 2006)。
図2-24 ヘリコプターに搭載されたFLS (Babichenko et al., 2004)。
表2-11 OLSの諸元 (Hangstermann and Reuter, 1990)。
図2-25 OLSの概観 (Hangstermann and Reuter, 1990)。
表2-12 LFSの諸元 (Reuter et al., 1995)。
図2-26 LFSの概観(Karmar, 2002)と光学系 (Reuter et al., 1995)。
図2-27 LFSのスキャニングパターン (Reuter et al., 1995)。
表2-13 LEAFの諸元 (Karmar, 2002)。
表2-14 SLEAFの諸元 (Brown et al., 1996)。
図2-28 DC-3に搭載されたSLEAFの概観 (Brown et al., 2001)。
表2-15 ヘリコプター搭載型蛍光ライダーの諸元 (篠野他,2005)。
図2-29 ヘリコプター搭載型蛍光ライダーのブロックダイアグラム (篠野他,
2005)。
図2-30 ヘリコプター搭載型蛍光ライダーによる観測の概念
(http://www.nmri.go.jp/navigation/sen/index_j.html)。
Water Raman Fluorescence
Fluorescence Fluorescence CCD image (1024x1024 pixles) Water Raman Fluorescence
Fluorescence Fluorescence CCD image (1024x1024 pixles)
図2-31 ヘリコプター搭載型蛍光ライダーによる観測例
(http://www.nmri.go.jp/navigation/sen/index_j.html)。
図2-32 油の蛍光スペクトル (Gruner et al., 1996)。
図2-34 Oldenburg大学の蛍光スペクトルカタログ
(http://las.physik.uni-oldenburg.de/data/spectra/index.htm)。
図2-35 Oldenburg大学の蛍光スペクトルカタログデータ
(http://las.physik.uni-oldenburg.de/data/spectra/index.htm)。
図2-36 異なる波長レーザ光により励起される藻類の蛍光スペクトルの例 (Heuermann et al., 1995)。
図2-37 Laser Flourosensorによる油膜の観測 (Reuter et al., 1995)。
浅海調査
陸域調査
浅海調査
陸域調査
図2-38 EstoniaにおけるFLSによる水質および油汚染調査 (Samberg et al.,
図2-40 陸域の油汚染調査結果 (Samberg et al., 2005)
図2-41 地表面の蛍光スペクトル (Babichenko et al., 2004)
図2-42 Laser Diagnostic Instruments 社のマッピングの概念 (http://www.ldi3.com/)
入射光
油膜厚d
水面 ラマン光
k e k r
水によるラマン散乱
⎟ ⎠
⎜ ⎞
⎝
⎛
− +
= R
R k
d k
r e
ln ' 1
図2-43 油膜厚の計測の概念。
図2-44 油 膜 と 油 膜 の な い 水 面 か ら の 信 号 強 度 の 概 念 図 (Hoge et al., 1980)。
図2-45 異なる油膜量の蛍光スペクトル (Patsayeva et al., 2000)
図2-46 DELOP04における油膜のハイパースペクトルセンサによる画像 (http://actimar.free.fr/SPIP/breve.en.php)
図2-47 DELOP04における油膜厚のマッピング結果 (Lennon et al., 2006)
2.3. マルチバンド利用用途のまとめ
1) 2波長レーザプロファイラによる測深調査
浅海域では,従来からの船舶搭載のソナーによる測深調査に替わって,航空機レーザプ ロファイラによる測深調査の需要が増しつつある。その航空機レーザプロファイラの利点,
限界を簡単に纏めると以下のように点があげられる。
航空機レーザプロファイラの有効な点
・ 調査費用の低減(従来調査の15-30%)
・ 広範囲を短期間に調査
・ 陸域の含めた水深・標高調査
・ 船舶調査に危険が伴う地域における調査
航空機レーザプロファイラの限界
・ 測深可能な深度が水の透明度に依存(最大50mくらい)
・ 海底面上の小さなもの(1m立法程度)の検知が困難
2) 蛍光レーザプロファイラの利用
主要な利用は,当初の開発目的である流出油の検知(分布域,種別,油膜厚)であるが 陸域への油汚染やクロロフィル等を含む水質マッピングへと利用分野が拡大されつつある。
油濁防除の観点からの重要性:
・ 夜間観測が可能 ⇒ 24時間体制での緊急対応
・ 分布域・油膜厚を計測 ⇒ 流出規模の把握
3) その他のレーザシステム
から油膜内に油膜内に伝播する超音波の速度に基づき油膜の厚さの算定を行う。LURSOT は,
カナダと米国の機関が共同で開発を行っている試作機で,実験室および陸上での試験には 成功したが,航空機によるデータ取得には成功してはいない(Brown et al., 1995)。図 2-49 はその概観を示したものである。また,CO2 レーザを用いて熱赤外域のスペクトルを観測し 鉱物マッピングを行うもの(Cudahy et al., 1999)などの開発も行われている。
表2-16 レーザ源 (Snock, 1997)。
Ultrasonic water
oil
CO2 Nd:YAG
surface
1st echo 2nd echo
Time (micro-sec)
Di s p la c e m ent & S igna l
surface displacement Laser-ultrasonic signal
図2-48 LURSOTによる油膜厚計測 (Goodman et al., 1997)。
Telescope
CO2 laser
Focusing optics
図2-49 LURSOTの概観 (Brown et al.,2001)。
3. レーザ発信機の可能性調査
1960 年メイマン博士がルビーレーザの発振に成功して以来、種々のレーザ媒質を用 いたレーザが開発されてきた。 粒子加速器を用いる自由電子レーザを別にしても、結 晶やガラスを用いる固体レーザ、気体を用いるガスレーザ、液体にレーザ媒質を溶か し込んだ色素レーザ、半導体レーザ等種々のレーザが小出力から大出力まで開発され ている。 レーザ加工機に用いられるレーザは、ライダー(レーザレーダ)に用いるもの とピークパワーが大きいという点で似通っている。表 3-1 と表 3-2 に加工機に用いら れる代表的なレーザを示す。現在では種々のレーザが用いられていることがわかる。
ライダー(レーザレーダ)に用いる光源として必要な性能を下記に示す。
(1) 測定に必要とされる波長を発振できること。
(2) 10n 秒程度より短い短パルス発振が可能であること
(3) ピークパワーが高く、数 10~数 J 程度の 1 パルスあたりのエネルギーが得られる こと。
(4) 発振プロファイルが安定していて、シングルモードに近いこと(Far Field Pattern が安定していること)
(5) 放熱が容易であること
表 3-1 レーザ加工機に使用される可視・紫外レーザ
エキシマレ ーザ
レアガスとハロゲンガスに高い電圧を瞬間的にかけることで励起状態を作り出し、紫外領域で高い出力のパルス発振を行うガスレーザです。 パルス幅 は数十 ns で、ビームの断面は放電領域の形状を反映し長方形のビームを高出力で発振します。ビームが太く、パルスエネルギーも 大きいので、ビー ムを一点に集中させる加工よりも、比較的大きな面積を高い照射強度で一括処理加工するような応用に最も適しています。 危険で不安定、ランニング コストの高いレーザとイメージされがちですが、アプリケーションによってはメリットが大きく他の UV レーザよりも優れている 場合もあります。
LD 励起固体 レーザ
d イオンなどがドープされた YAG 等の結晶を LD(ダイオードレーザ)により励起し、まず波長約 1μm のレーザ光を取り出します。その後 LBO 等の非 線 形光学結晶によって波長変換し、基本波長の 1/3 および 1/4 波長の紫外線レーザ光を作り出します。高い効率の波長変換を実現するために Q スイッチ などで先頭値が高められ数十 ns のパルスで発振します。LD 励起により効率が高く、ビームが熱で揺らぎにくいので、微小なスポットに安定して集光で き、この 点を生かして、難加工物質の微細加工にも威力を発揮できます。原則内部に高い電圧を使用することもなく、メンテナンス性も期待できます。
ランプ励起 固体レーザ
Nd イオンなどをドープした YAG 等の結晶を高輝度ランプやフラッシュランプの強烈な光により励起し、まず波長約 1μm のレーザ光を取り出します。そ の 後 LBO 等の非線形光学結晶によって波長変換し、基本波長の 1/3 および 1/4 波長の紫外線レーザ光を作り出します。高い効率の波長変換を実現する ため に Q スイッチなどで先頭値が高められ、LD 励起に比べてゲインが高く数十 nsec 以下のパルスで発振します。励起用ランプの制約から 10Hz~20Hz の 繰り返しが一般的です。LD 励起に比べてパルスエネルギーを大きくできますが、ビーム品質は LD 励起ほど良質のものは得にくい傾向があります。
紫外線レーザ 380nm未満
モードロッ クレーザ
Nd イオンドープの YAG 結晶をレーザ媒体として AOM や可飽和吸収体を組み合わせ、共振器の縦モードを同期して発振させます。ピコ秒領域のパルス幅 で 100MHz 前後の繰り返しのレーザ光を作り出し、非線形光学結晶で UV 域に波長変換します。通常パルスエネルギー は Q スイッチほど大きくないです が、反面、繰り返しが速いのでポリマーや薄膜などに対して微細で高速な加工の可能性を提供します。
LD 励起固体 レーザ
Nd イオンなどがドープされた YAG 等の結晶を LD(ダイオードレーザ)により励起し、まず波長約 1 ミクロンのレーザ光を取り出します。 その後 LBO 等の非線形光学結晶によって波長を 1/2 に変換し、可視光(Visible)としてレーザ光を出力します。加工用に使用されるレーザは 532nm 近辺のグリー ン光の発振器ですが、ブルーやレッドなどのレーザ光を発振する製品もあります。可視光レーザはレーザ光をガラスの中で焦点を 結ばせると内部に加
表 3-2 レーザ加工機に使用される可視・紫外レーザ
CO2 レーザ
適量のヘリウムと窒素を混ぜた炭酸ガスに放電を加えて CO2 分子の振動順位遷移から高い効率で波長 10μm 前後のkW 級の大きな出力が得られます。最 もポ ピュラーな大出力レーザで加工用レーザのチャンピオンと言えます。遠赤外線は多くの物質で吸収され熱となって材料を融かすため鋼鈑の切断や 金属の溶接などで利用されています。また装置価格が安いためコンシュマー向けのレーザマーカーやレーザ彫刻機にも搭載されています
LD 励起固体 レーザ
Nd イオンなどがドープされた YAG 等の結晶を LD(ダイオードレーザ)により励起し、波長約 1μm のレーザ光を出力します。LD 励起により効率が高 く、
ビームが熱で揺らぎにくいので、微小なスポットに安定して集光でき、この点を生かして微細加工にも威力を発揮できます。原則内部に高い電圧を使 用する こともなく、メンテナンス性も期待できます。 大出力の製品は鋼鈑の切断や溶接に使用されています。その他、レーザマーキングや各種レー ザ加工にも使用されています。
ランプ励起 固体レーザ
d イオンがドープされた YAG 等の結晶を高輝度ランプやフラッシュランプにより励起し、波長約 1μm のレーザ光を出力します。パルス発振の場合、励 起用 ランプの制約から 10Hz~20Hz の繰り返しが一般的です。LD 励起に比べてパルスエネルギーを大きくできますが、ビーム品質は LD 励起ほど良質の もの は得にくい傾向があります。各種金属の溶接をはじめ電線や電池タブなどの電極溶接、レーザマーキング、その他、各種レーザ加工にも使用され ています。
ファイバー レーザ
Yb イオンや Er イオンをドープしたシングルモードファイバのクラッドを 2 重構造にし、内側のクラッドに LD の励起光を流し込むようにして励起する ことで 驚異的な効率で高品質なレーザ出力が得られます。発振波長は Yb の場合、1μm から 1.1μm、Er の場合 1.5μm 領域です。Q スイッチやモード ロッ クで短い時間幅のパルスを出力できるものもあります。シングルモード発振とマルチモード発振の製品が販売されており、最近ではシングルモー ドでも数 kW レ ベルのレーザ発振器が製品化されています。
ディスクレ ーザ
Nd イオンの代わりに YAG の結晶とマッチングの良い Yb イオンを高い濃度で混入し LD(ダイオードレーザ)で高密度な励起を行うことで、薄いディス ク 状の媒体から波長約 1μm のレーザ光を大きな出力で得られるレーザです。レーザ媒体がディスクのため放熱性がよく熱による熱レンズ効果などの ビーム 品質の劣化が少ないのが特徴です。また出力が低いモデルでは空冷でも安定したレーザ発振が期待できます。鋼鈑の切断や溶接、レーザマーキ ングや各種 レーザ加工にも使用されています。
赤外線レーザ 781nm以上
ハイパワー LD
光通信用の需要が牽引してハイパワーの光源としても著しい進歩を遂げたレーザダイオードをアレー状に並べ、その出力ビームを直接レーザ加工に使 用できるようにしたレーザ発振器です。特徴的な出力ビーム形状を整え、さらに低 NA のマルチモードファイバに結合したファイバーカップリングモデ ルも出現して います。最近では LD の高出力化、高安定化が進みスタックすることで数 kW の製品が登場しています。また LD の品質も上がり長期保証
水深を計測する場合には、水に対して比較的透過率が高い 500~560nm の青緑色の波 長が適していると言われている。 光は 1nm の間に約 30cm 進むことから、ライダーに 適した短パルスを発振させるためには、レーザの共振器長をある程度以下としてかつ 増幅度の高いレーザ媒質を使い、短時間にレーザエネルギーを増幅する必要がある。
このことから、一般にレーザ媒質密度の小さなガスレーザは使用に適さず、比較的高 圧力下での放電を使用するエキシマーレーザが使用されることがある程度である。 ま た、ガスレーザは、ガス中の放電によって励起することから、高圧電源が必要とされ、
真空中で用いる際には放電に対する注意深い対策が必要である。
色素レーザは大出力、短パルスも可能であること発振波長が比較的自由に選べると いう利点があるが染料の溶液を循環させ排熱や色素劣化の低減を図っている。宇宙用 として考えた場合には、有機物である色素の寿命と言う点と液体を強制循環させる機 構が必要と言うデメリットがあり大規模に使用されたことは無い。
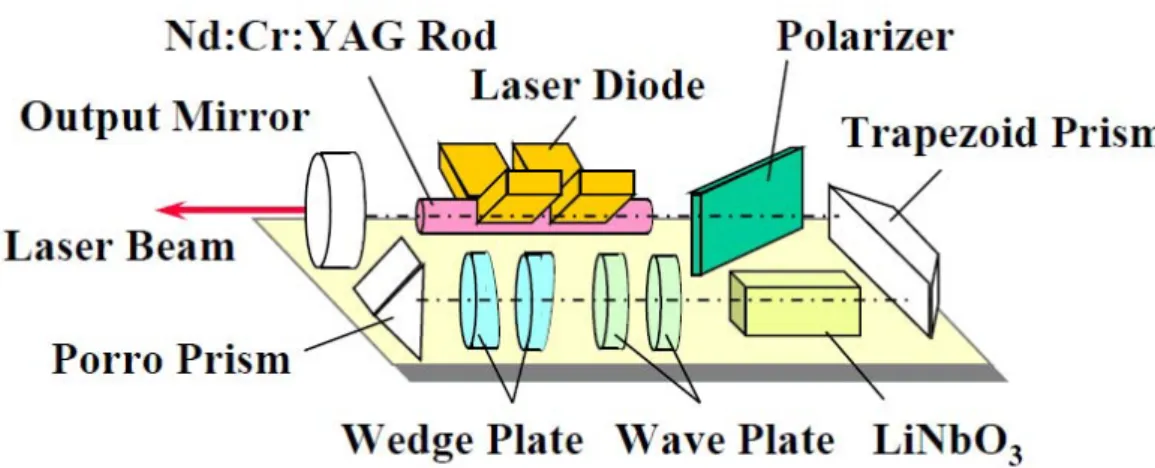
固体レーザは、宇宙用として最も実績のあるレーザで、これまでライダーに用いら れてきたものの殆どが、YAG(イットリウム・アルミニウム・ガーネット)にネオジウム をドープした結晶を用いている。 発振波長は、1064nm であり、非線形結晶を用い 2 倍高調波(SHG,532nm、緑)、3 倍高調波(THG, 355nm、紫外)を発生させ使用する。 地上 装置では熱光学特性が小さい YLF(イットリウム・フッ化リチウム)にネオジウムをドー プした結晶 Nd:YLF も Nd:YAG ほどではないが比較的多く使用されている。 レーザ媒 質はドープしている Nd であるため、発振波長は Nd:YAG とほぼ同じ 1047nm であり、SHG や THG も同様に利用されている。 宇宙用としては、MDS-2 搭載を目指して開発が進め られたレーザに採用されていたが、計画は中止された。 米国でも研究は進められて いるという報告はあるが、実際に宇宙用として使用された例は不明である。 半導体レ ーザは発振波長が比較的自由に選べることと、電流を流せば高効率で発振させること ができ、応用分野によっては非常に優れたデバイスであるが、ライダーの様に、ピー クエネルギーが高い短パルスの出力を得ることができない。
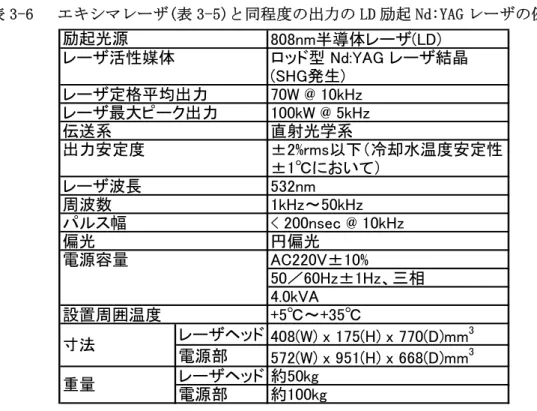
しかし、比較的大出力の QCW(Quasi Continuous Wave)動作の半導体レーザで固体レ ーザを励起すると、小型、高効率、高信頼性の固体レーザを作ることができる。 表 3-5 に示す宇宙機搭載用の Nd:YAG レーザは全てこのタイプである。 現在開発が進められ
レーザは、希ガスとハロゲンの混合ガスを用いたレーザで、通常は分子を作らない希 ガスとハロゲンを励起状態とし分子をつくりレーザ媒質として使用する。表 3-4 に示 す様にガス媒質を選ぶことで 350nm より短い波長のレーザを直接発振させることがで きる。
エキシマとは電子励起状態の原子分子が、他の原子分子と形成する分子である。
Excited dimer(励起二量体)を略して Excimer と呼んだことに由来する。とりわけ基 底状態では結合しない希ガスとハロゲンの原子によって形成されるエキシマがレーザ 媒質としてよく使用される。 エキシマが励起状態でのみ存在し、基底状態では分解す るので、完全な反転分布となることを使用しレーザ発振をさせている。 実際には、混 合ガス中でのパルス放電によって生成する希ガス原子とハロゲン原子によってエキシ マを生成し、パルス発振をさせる。エキシマの寿命はきわめて短く、一般的にはナノ 秒のオーダーである。 励起準位の寿命が短いということは、自然発光のスペクトルが 広く、Nd:YAG レーザ等にくらべ比較的広い波長範囲で発振させることができ、短パル ス発振(ピコ秒)
航空機搭載蛍光ライダ(FLS-AU)は、蛍光を効率的に観測するためにできるだけ波長 の短い紫外線の使用が好ましい。 一方、280nm より短い領域(UVC)では大気を透過で きなくなるため 300nm 付近を発振する XeCl を使用しているものと考えられる。 紫外 域のレーザとして期待されるものであり、図 3-1 に示すような医療用(近視治療、レー シック治療用)として小型で使いやすいものも開発されている。 しかし、表 3-5 と表 3-6 に示すように、同規模加工機用のエキシマレーザと LD 励起 Nd:YAG を比較すると質 量で 8 倍の差があり実際のハードウェアの複雑さ、難易度を現しているものである。
以上の様に、水深計測を目的とする場合には、Nd:YAG の SHG が波長としても適して おり、かつ、宇宙用・産業用を問わず実績のある方式であることから宇宙用として最 適なレーザであるといえる。