筑波大学大学院博士課程
システム情報工学研究科修士論文
ロボットスーツ
HAL の自律化による
下半身不随患者の歩行支援に関する研究
鈴木
健太
(知能機能システム専攻)
指導教官
山海嘉之
2005 年 1 月
概要
本研究では,下半身不随の障害者に自身の脚を用いた移動を提供するために,装着者の動 作意思を推定しながら歩行動作を実現する歩行支援手法の提案を行い,ロボットスーツ HAL-3 を用いて障害者に適用することで本手法の検証を行った. 脚動作の実現は,HAL による軌道追従制御によって実現した.この軌道追従制御に用いる 目標軌道は,健常者歩行の計測から得られた下肢関節角度パターンから生成した.さらに歩 行支援中の装着者の動作意思に応じて,タイミングよく歩行軌道の提供が行えることを目指 して,目標軌道は遊脚期パターンと支持脚期パターンをそれぞれ準備した. 意思の推定には,歩行動作を決定する意思の中でも特に,歩行開始・停止に関する意思, 遊脚期と支持脚期の遷移に関する意思に着目し,これらの意思が反映されると考えられる歩 行動作中の運動情報を利用した.本研究では,脚による重心移動が可能な下半身不随患者へ の支援では床反力を,一方,筋弛緩状態で重度下半身麻痺患者への支援を想定した被験者に 対する支援では上半身の姿勢をそれぞれ計測し,意思の推定を行った. 実際に上記の異なる被験者に歩行支援を行った結果,前者への歩行支援では歩幅の拡大が 見られ,被験者の重心移動タイミングに合わせて支援が行われた.また後者への歩行支援で は,自力での歩行が困難な被験者に,上半身動作に合わせて歩行動作を実現することができ た.両者に共通する点は,患者の症状に応じた動作意思推定のための運動情報を用いること によって,歩行動作の開始・停止および遊脚期と支持脚期の切り替えが,被験者にとって違 和感なく行われたことである.このことは,動作意思の推定を伴った歩行動作の提供による 本歩行支援手法が,下半身不随患者に対する歩行支援を行う上で有効であることを示してお り,歩行支援機能の向上に大きく寄与するものであると言える.目次
第1 章 序論··· 1 1.1 研究背景··· 1 1.2 研究目的··· 5 1.3 研究方針··· 5 1.4 本論文の構成··· 7 第2 章 ロボットスーツHAL··· 8 2.1 HAL の開発経緯と特徴··· 8 2.2 HAL-3 の概要 ··· 9 2.3 レートジャイロ··· 12 2.4 歩行器··· 15 2.4.1 歩行器について··· 15 2.4.2 歩行器の改良··· 17 2.5 まとめ··· 19 第3 章 歩行支援のための目標軌道生成··· 20 3.1 目標軌道生成の基本概念··· 22 3.1.1 健常者歩行パターンによる全軌道追従制御実験の結果··· 22 3.1.2 健常者歩行パターンによる全軌道追従制御実験の考察··· 24 3.1.3 軌道追従に用いる目標歩行軌道の条件··· 27 3.2 目標軌道の生成方法··· 28 3.2.1 健常者の歩行計測··· 28 3.2.2 障害者の身体パラメータ計測と健常者パターンの選定··· 28 3.2.3 仮目標軌道の生成··· 30 3.3 まとめ··· 45 第4 章 装着者の動作意思推定と状態推定··· 47 4.1 軌道追従制御による歩行支援の基本概念··· 48 4.2 動作意思推定アルゴリズム··· 49 4.2.1 床反力を利用した意思推定方法··· 49 4.2.2 上半身側屈角を利用した意思推定方法··· 50 4.3 目標軌道提供手法と歩行支援··· 52 4.4 まとめ··· 55 第5 章 障害者のための歩行支援実験··· 56 5.1 重度下半身感覚麻痺障害者への歩行支援実験··· 56 5.1.1 実験目標··· 56 5.1.2 実験方法··· 56 5.1.3 実験結果··· 59 5.1.4 考察··· 615.2.1 実験目標··· 62 5.2.2 実験方法··· 62 5.2.3 実験結果··· 65 5.2.4 考察··· 68 5.3 まとめ··· 70 第6 章 結論··· 71 6.1 本研究の成果··· 71 6.2 本研究の総括··· 72 謝辞 ··· 73 参考文献··· 74
図目次
図 1.1 障害者歩行支援における HAL と装着者の担当機能 ...4 図 1.2 健常者歩行における各部位の機能 ...4 図 2.1 HAL-3 ...9 図 2.2 HAL-3 システム外観図...11 図 2.3 上半身姿勢計測システム...12 図 2.4 シリコン振動ジャイロ ...13 図 2.5 レートジャイロ静止時設定値電圧のずれ ...14 図 2.6 静止時設定電圧のずれに起因する角度データのドリフト ...14 図 2.7 歩行器 ...15 図 2.8 歩行器とアクチュエータの接触...16 図 2.9 上半身の前傾による歩行器とアクチュエータの接触 ...17 図 2.10 製作した上部マット部のブリッジ ...18 図 2.11 本研究で用いる歩行器(改良後) ...18 図 3.1 軌道追従制御ブロック線図 ...20 図 3.2 目標パターンと全軌道追従制御時の障害者の関節角度変化...25 図 3.3 目標パターンと全軌道追従制御時の健常者の関節角度変化...26 図 3.4 大腿長と下腿長 ...29 図 3.5 ある健常者歩行の右脚下肢関節角度データ...30 図 3.6 床反力センサ出力 ...32 図 3.7 床反力データ...32 図 3.8 Phase 遷移時刻付近での関節角度の挙動 ...33 図 3.9 床反力による遷移条件で分解される関節角度データ ...33 図 3.10 分解された歩行中の 1 周期毎の股関節角度パターン ...34 図 3.11 左右の脚の Phase の関係...35 図 3.12 パターン周期縮小の場合の調整手順一例 ...37 図 3.13 パターン周期拡大の場合の調整手順一例 ...38 図 3.14 規格化された角度パターン(右股関節) ...39 図 3.15 平均的な角度パターン(右股関節)...39 図 3.16 姿勢による下肢関節にかかる負荷の違い ...40 図 3.17 オフセット除去後の関節角度パターン ...41 図 3.18 生成されたパターンの開始時角度と終了時角度のずれ...42 図 3.19 Bezier 曲線によって開始角度(0[rad]) に連結された角度パターン ...42 図 3.20 パターンの修正に用いる Bezier 曲線の設定 ...43 図 3.21 歩行 1 周期分の仮目標角度パターン ...43 図 3.22 一連の手順によって生成された仮目標軌道...44 図 3.23 仮目標軌道生成の流れ ...46図 4.2 床反力による意思推定を用いた軌道追従制御ブロック...49 図 4.3 上半身側屈角による意思推定を用いた軌道追従制御ブロック ...50 図 4.4 上半身角度データの認識方法 ...51 図 4.5 軌道追従による歩行支援のフロー ...53 図 5.1 被験者 A の通常歩行時下肢関節角度...57 図 5.2 被験者 A に対する歩行支援に用いる歩行パターン ...58 図 5.3 下肢関節角度データと目標角度...59 図 5.4 歩幅算出のためのリンク系モデル ...60 図 5.5 被験者 B に対する歩行支援に用いる歩行パターン ...63 図 5.6 下肢関節データと目標角度 ...65 図 5.7 上半身側屈角度に基づいた Phase 遷移 ...66 図 5.8 Phase 遷移と目標歩行軌道...67 図 5.9 被験者 B に対する歩行支援の実験風景 ...69
表目次
表 2.1 シリコン振動ジャイロ仕様 ...13 表 2.2 歩行器仕様 ...16 表 3.1 支援対象者とパターン提供者の身体パラメータの比較...22 表 5.1 被験者 A の通常歩行における平均歩行周期 ...58 表 5.2 通常歩行時と歩行支援時の平均歩幅...61 表 5.3 被験者 B とパターン提供者の身体パラメータの比較...64第1章
序論
1.1
研究背景
脳性麻痺による筋肉の硬直や不随意的な異常運動,脳卒中による身体麻痺や感覚障害,事 故等による脊椎損傷,高齢による筋骨格系の衰弱など,身体に障害を抱える人々にとっては 移動や食事,排泄などの基本的な行動も困難であり,その結果行動範囲を著しく狭め,日常 生活での自立を阻害する深刻な問題となっている.また開発途上国を中心に世界には,ポリ オ(急性灰白髄炎)*[1]をはじめとする感染症が原因で手足の筋肉に麻痺が生じ,運動機能 に障害を持つ人々がいる.こうした感染症では下肢運動機能に障害を抱える場合が多く,自 分の力で歩くことが困難になり,寝たきりにより他の身体機能や運動機能に障害をもたらす という二次的な問題も存在する.その結果,生きがいを持てなくなるなどの精神面への悪影 響が誘発されることも考えられる.これらの下肢運動機能障害者にとって,寝たきりの生活 を強いられないようにするために,残された身体や運動機能を用いて,他人に頼ることなく 移動が可能になることは,生き生きとした自立生活を促進する上でも非常に意義深い. 現在,このような障害者に対する移動の補助や支援を行う方法として,車椅子等の車輪型 システムが広く利用されている.これらのシステムは低コストで,上半身に多少の力があれ ば容易に移動が可能であるという利点がある反面,その特性上,不整地環境で安定した移動 を行うことが困難であるという問題がある.この問題に対して,最近では段差の除去やスロ ープの整備など,車椅子でも不自由なく移動できる環境整備が行われつつある.しかしなが ら,あらゆる環境で十分なバリアフリーが浸透しているとは言い難く,彼らの行動が制限さ れているのが現状である.また,車椅子利用者は座った姿勢で長時間行動するために,体幹 を支えるための筋力や骨密度,さらには自律神経機能の低下を引き起こしたり,座面と接し ている皮膚に褥創(床擦れ)ができる可能性を高めたりするなど,肉体的にリスクが高い. さらには,健常者と接する際に常に見上げるような状態にあるため,健常者から見下されて いるという不愉快な感覚を,彼らに与えてしまうことも問題視されている. 以上のことから,障害によって下半身不随となり,通常の歩行が困難となった人々に対す る移動のための支援には,既存の環境に手を加えることなく,段差や狭い場所,不整地等を 健常者と同様に,自由に移動できる手段が望ましい.彼らが,健常者と同じような姿勢で生 活できるようになることは,健常者が想像する以上に大きな意味を持つと考えられる. * ポリオに関しては現在では,予防接種(ワクチン)の充実によって世界的に根絶が目前でこうした問題を解決し得る移動手段として,装着型ロボットによる歩行支援が考えられる. 障害者がロボットを装着することで,自らの脚を用いて歩行することができれば,たとえ失 った身体機能の回復が望めなくとも,車椅子に比べて環境への適応性が向上し,健常者と同 じようなスタイルで生活を送ることも可能となる.このような装着型ロボットを用いて,人 間の歩行機能を支援しようという研究は,これまでにも既に行われてきている.J. Pratt ら は,膝関節に装着されるアクチュエータによって歩行や階段昇降における膝関節動作を支援 するための装着型ロボットRoboKnee[2][3]を開発している.このロボットは歩行支援中の装 着者の床反力や歩行のタイミングを計測することで装着者の状態を捉え,動作に合わせて歩 行支援が行われる仕組みとなっている.ただし健常者がより楽に歩行や階段昇降,登山等を 行えるようにすることを目的として研究されているために,下肢全体の機能や姿勢制御機能 を実現できる構造にはなっておらず,下半身不随の障害者への運動支援に適用することは困 難である. 一方 Johnson や Repperger らは,下半身麻痺や脳性麻痺の患者,または切断手術などで 下肢の一部または全てを欠損している障害者への歩行支援として,装着型ロボットの開発を 行った[4][5].このロボットは圧縮空気を利用したアクチュエータを使用しており,移動の簡 便さを狙った研究となっている.このロボットの特徴はその操作方法にあり,装着者は手元 のコントローラを操作することによって脚の動きを実現している.手元の操作で全ての歩行 動作が制御できるため,下半身不随の障害者にも適用可能なシステムであるが,適切に使い こなすためのトレーニングが必要となり,容易に使用できるシステムとは言い難い.これと 同様のシステムで,手元のジョイスティックを用いて操作者が自在に移動できる形態のロボ ットとして,TOYOTA の搭乗型ロボット i-foot[6]がある.このロボットは進行方向や歩行速 度等を自由に操作でき,利用者の意思通りに移動が実現されるシステムであるが,利用者自 身の脚を用いた歩行動作を実現するものではなく,車椅子と同様に環境への適応性が悪く, また大きさや重量の問題があり,下半身不随の障害者が日常生活で利用するには困難なシス テムであると言える. さらに歩行支援に関する研究では,医療現場での適用を想定した数例の研究成果が報告さ れている[7][8][9].これらの研究は主に,脳卒中を患った患者に対するリハビリテーション を目的として行われている.Colombo らは,トレッドミルトレーニングが脊椎損傷の障害者 の歩行機能改善に効果があるという研究成果に基づいて,駆動式歩行補助装具(driven gait orthosis:DGO)を用いたトレッドミル Lokomat を開発し,下半身麻痺の状態にある脳卒中 受傷後の障害者に歩行訓練を行う際の手法を提案している[9].この Lokomat は,トレッド ミルと装着型の下肢関節駆動部分から構成されており,利用者はその駆動部によって提供さ れる生理学データに基づいた歩容をトレッドミル上で体験できるというものである. Colombo らはこのシステムによって,作業療法士の負担を軽減させることができ,また障害 者が再現性のある歩行パターンによって訓練されるため,効果的なリハビリテーションを受 けることができるという利点を主張している.さらにこの研究では,単純に軌道追従のみを 行うのではなく,装着者の歩行中の状態に適応した角度パターンを提供するアルゴリズムを 開発している.しかし,リハビリテーションに重点を置いているため,その適用範囲がトレ ッドミル上での歩行訓練に限定されており,下半身不随の障害者の日常生活における歩行支 援には適用困難なシステムとなっている.
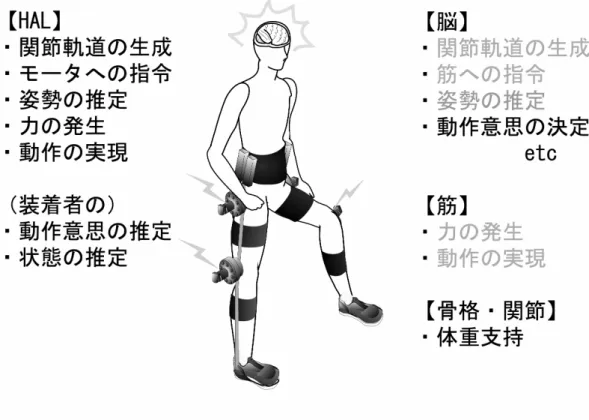
本研究室でも,人間と一体化し,装着者の下肢運動機能を補助することで歩行や立ち座り 等の日常動作の支援を行う装着型ロボットとして,ロボットスーツHAL(Hybrid Assistive Limb)を開発している.現在までに HAL-1[10],HAL-2,HAL-3[11][12],HAL-4[13]の開 発が行われてきており,装着者に対する運動機能の支援方法に関する研究が行われてきた [14]~[21].HAL を用いた研究では,これまで主に健常者を対象とした歩行支援に適用し, その機構的特徴や運動支援方法の有効性を実証してきた.しかし外骨格機構を有する HAL は,健常者に限らず,日常生活において健常者よりもはるかに運動支援の必要性が高い下半 身不随の障害者に対しても適用可能なシステムであり,他の歩行支援システムと比較しても その適応範囲の広さが特徴となっている. これらの従来研究を踏まえて,日常生活における下半身不随の障害者に対する歩行支援を 行う装着型ロボットに求められる機能を整理しておく. ・ 下肢全体の機能や姿勢制御機能を実現できる構造を有すること. 健常者や軽度の障害を有する障害者に対する支援であれば,RoboKnee のようなシ ステムに見られる部分的な力の支援でも効果的であるが,本研究で想定する下半身不 随の障害者を対象とした場合には,歩行に必要な運動機能全般を考慮する必要がある. ・ 環境適応性を考慮して,健常者と同様の姿勢で,装着者の脚を用いた移動であること. 環境への適応性つまり走破性の向上は,歩行支援の研究において非常に重要な課題 である.そのためには障害者が自らの脚を用いて立ち,健常者と同じようなスタイル で生活できるようになる支援システムが求められる. ・ 装着者がロボットに対して動作意思を容易に伝達できる仕組みを有すること. 望ましい歩行支援とは,単に装着者がロボットによって歩かされるのではなく,ロ ボットが装着者の動作意思を汲み取り,装着者の思い描くような歩行動作を実現する ことである.装着者が動作意思を伝達する方法として,ジョイスティック等の操作機 構を有するシステムが開発されてきたことは既に述べた.しかしこのような伝達方法 では,本来の歩行動作にはない,操作のための作業を装着者が別途行う必要があり, 健常者と同様の歩行動作を実現することはできない.そうした問題を解決するために は,装着者が意識的に操作を行わなくても,一連の歩行動作中に見られる動作,また はそうした動作によって得られる運動情報から,ロボットが装着者の意思を推定する 機能を有することが望ましい. ・ リハビリテーションに止まらず,障害者の歩行機能の実現が可能であること. 前述の Lokomat のようなリハビリテーションシステムの開発では,歩行軌道の提 示に力点が置かれていた.しかし,障害者の日常生活における歩行機能の実現そのも のが課題となる. ここで,下半身不随の障害者に対する歩行支援を実現するために,HAL に求められる機能 と歩行支援を受ける装着者の機能を図1.1 にまとめておく.健常者歩行における各部位の機 能(図 1.2)と比較して,図 1.1 では脳の機能の一部と筋肉が担うはずの機能が淡色の文字 で記述されており,それらの機能をHAL が代行する必要があることが分かる.加えて,HAL の必要機能として装着者の動作意思,状態の推定が挙げられている.
図 1.1 障害者歩行支援における HAL と装着者の担当機能
1.2
研究目的
本研究の目的は,下半身不随患者に対して動作意思に基づいた歩行支援を実現するために, 1)健常者の歩行軌道に基づいた脚動作を実現する手法 2)支援対象者の意思に基づいて歩行動作の開始・停止および,遊脚期・支持脚期パターン の開始・停止を制御する手法 を提案し,実験により本手法の有効性を検討する.1.3
研究方針
実際の下半身不随患者の下半身は,麻痺による筋弛緩で筋収縮が行われず,全く力が出せ ない状態にあるケースばかりではなく,硬直してしまっているケースもあり,年齢や下半身 不随となった病状,原因,さらには急性期か生活期(慢性期)かといった時間の経過やリハ ビリテーションの実施状況によってもその状態は様々である[22].そこで本研究ではまず, 下半身不随患者への歩行支援として,以下の2 種類の症状にある障害者それぞれに対する歩 行動作支援手法の開発を行い,障害者への手法の適用によってその手法の有効性を検討する. 1. 下半身に麻痺があるために,歩行補助具の支えがない状態では歩行が困難な障害者. 2. 下半身が麻痺しており完全に筋弛緩状態にあるために,歩行補助具の支えがない状態で は歩行動作のみならず,直立姿勢を維持することも困難な障害者. なお,本研究において想定している下半身不随の障害者に対して,HAL による歩行支援を 行う際に必要となる具体的機能として,以下の4 項目が挙げられる. [機能 1] 健常者の歩行パターンに基づいた脚動作を実現する機能. [機能 2] 装着者自身では支持できない装着者の体重を支持する機能. [機能 3] 装着者の意思に基づき,歩行したいときに歩行を開始でき,歩行中に停止したいと きに停止できる機能. [機能 4] 装着者の意思に基づき,装着者の望む歩行周期や歩幅を歩行動作中に調整する機能 および歩行方向を制御する機能.[機能 1]から分かるように,本研究では健常者の歩行動作を目標歩行動作としている.身体 特性を生かして歩行を実現している健常者動作に習うことで,個人の体格,身体パラメータ の差異を考慮する必要はあるものの,比較的容易に人に適した目標動作を生成することがで きる.一方では人体のリンクモデルを構築しシミュレーション等によって目標歩行軌道を算 出する方法も考えられるが,その導出は容易ではなく,人の特性が十分に考慮されていると は限らない.[機能 1]を実現することによって,1の障害者に対しては,自力では実現困難な 健常者に近い歩行動作を実現できるようにすること,つまり筋力の増幅とより健常者に近い 歩行動作の提示が目標となる.また2の障害者に対しては,自らの脚を用いて歩行すること ができるようになることと,[機能 2]の実現によって自力では困難な直立姿勢の維持が行われ ることが目標となる. さらに本研究では,単に装着者がHAL によって歩かされるのではなく,動作意思を HAL が装着者から読み取ることで,装着者にとって違和感のない効果的な歩行支援を行おうとし ていることは既に述べた.歩行動作における装着者の意思としては,「歩行を開始したい」や 「停止したい」といった[機能 3]に見られる意思がある.これまでに,歩行動作中の筋活動に 伴う生体電位信号のパターンを用いて,健常者の歩行アシストを行った研究報告[18]~[21]が あり,これらの手法を応用することで生体電位信号を用いて,歩行動作における開始と停止 の意思を推定することは可能であると考えられる.しかし本研究で支援対象とするような障 害者の歩行動作では,意思の推定を行うために必要な情報を含んだ生体電位信号が計測され ないケースが多く,生体電位信号によって歩行開始・停止の意思を推定することは困難であ る.そこで本研究では,下半身不随の障害者からも計測可能な動作情報として,重心移動に 伴う床反力と上半身姿勢の変動に注目し,これらの情報から装着者の動作意思を推定するこ とにする.このように,装着者の動作情報から歩行開始または停止に関する装着者の動作意 思を推定して,それらを反映して歩行支援を行おうという研究はこれまでに例がなく,本研 究が歩行支援研究における新規性を主張する機能となっている. また「このくらいの速度で歩行したい」や「脚をこの程度振り出したい」といった動作中 に通常無意識的に働いている意思や,「右に曲がりたい」などのさらに高機能の意思など,[機 能4]に見られるような意思も存在していると考えられる.しかしこれらの意思推定は今後の 課題とし,本研究では歩行周期および歩幅の調整は,支援を受けた際の装着者の印象(アン ケートに対するコメント)に基づき,随時手動で行うことにする. 実際の歩行支援では,健常者の歩行のような脚の動きを実現して移動を可能にするだけで はなく,姿勢の安定化に関しても HAL によって制御されることが望ましいが,本研究では 装着者の体重支持は HAL が行い,姿勢の安定化については歩行器に装着者がつかまること で確保されることとする.このような歩行器を使用しての歩行では,障害者が日常生活にお いて不自由なく移動できるようになるとは言い難い.しかしながら,これまで車椅子でしか 移動できなかった障害者が自らの脚で立ち,移動できるようになることは,精神的にも良い 効果が期待でき意義深いと言える.本研究で使用する歩行器に関しては,第2 章で改めて説 明する.
1.4
本論文の構成
本章では,既に研究の背景と目的,および研究方針の概要について述べた. これ以降第2 章では,本研究で用いるロボットスーツ HAL-3 のシステム構成と,本研究 で新たに開発を行った動作意思の推定に用いる計測系,および歩行支援に使用する歩行器に ついて述べる. 第3 章では,健常者の歩行を計測し,そこで得られる歩行中の下肢関節角度パターンから 歩行支援に利用する目標歩行軌道を生成するための手法について論じる. 第4 章では,第 3 章で得られる目標歩行軌道を基に,障害者に対して HAL による歩行支 援を実現するために必要な課題を挙げ,歩行支援中の装着者の動作意思,状態を推定する手 法,および本研究で用いる歩行支援の実現方法について論じる. 第5 章では,第 4 章の知見を基に,実際に障害者に対して HAL による歩行支援を行い, 提案する歩行支援手法の有効性について検証する. 最後に第6 章において,研究成果を総括・検討し,論を結ぶ.第2章
ロボットスーツ HAL
本章では,これまで開発されてきたロボットスーツHAL(Hybrid Assistive Limb)の概 要を述べ,本研究で使用した HAL-3 のシステム構成について簡単に述べる.さらに本研究 で動作意思の推定を行うために開発を行った計測系に述べる.また,本章の最後に本研究で 使用する歩行器について述べる.
2.1 HAL の開発経緯と特徴
前章で既にHAL-1, HAL-2, HAL-3, HAL-4 が開発されてきたことは述べたが,ここ で簡単にその開発経緯についてまとめておく.まず HAL-1,HAL-2 開発段階では,基礎的 な外骨格システムの構築と,それを用いたパワーアシストの基礎的な研究が行われた.次に HAL-3 開発段階では,HAL-1,HAL-2 がスタンドアローンでは動作することができなかっ た点を考慮し,コンピュータやセンサシステムの小型化,アクチュエータの見直し等によっ て,HAL 単体で動作することが可能なシステムの構築を行った.さらに,HAL-3 が特定の 装着者を対象に製作したために,装着可能な対象者が限定されてしまっていたという問題点 を考慮して,多様な身長,体形に対応可能なフレーム調整機構を取り入れた HAL-4 が開発 された.
2.2 HAL-3 の概要
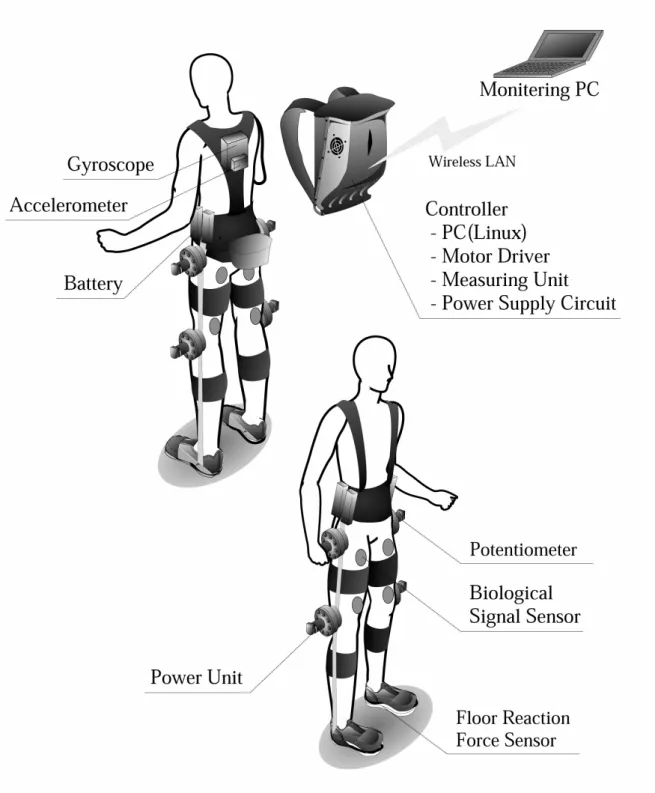
HAL-3(図 2.1)の概要について説明する.HAL-3 は,歩行や椅子からの立ち座り動作な どの日常生活における下肢動作の支援を目的に開発された.装着者の体側に沿う外骨格フレ ームには,アクチュエータが左右の股関節,膝関節の各関節部分に取り付けられている.こ れらを駆動させることで,モールドを通じて装着者に対して,下肢の動作を支援する構造と なっている.各関節の自由度は 1 自由度であり,HAL-3 の全自由度は 4 関節分の計 4 自由 度となっている.また,計測系としては,各関節角度を計測するための角度センサ,上半身 の姿勢を計測するために今回新たに導入されたレートジャイロ,HAL の傾きを計測するため の加速度センサ,本研究で重心移動の推定に用いる床反力センサ,装着者の筋活動を計測す るための生体電位信号センサ,モータ駆動電流を計測するための電流センサを装備する.さ らに,制御用コンピュータ,モータドライバ,計測回路,電源回路は背中に取りつけられた バックパック内に収納されている.電源にはバッテリーを使用しており,これによってHAL 単体で機能を発揮することが可能となっている. 図 2.1 HAL-3システムの外観図を図2.2 に示す.なお HAL-3 は,以下の 5 つの構成要素から成り立っ ている. ● 外装系 HAL-3 の外装系は,外骨格フレーム,装着者と HAL を一体化するためのモールド, 制御用コンピュータ,計測回路,モータドライバ,電源回路をHAL-3 本体に搭載するた めのバックパック,シェルカバーから構成されている. ● 駆動系 HAL-3 では,アクチュエータとして DC モータとハーモニックドライブギヤを採用し ている. ● 電源系 電源系にはDC 電源としてバッテリーを用いた.バッテリーは回路・コンピュータ系用 のものとモータ駆動用の2 系統とした. ● 計測系 HAL-3 は計測系として, ・ 各関節の角度を計測するための関節角度センサ(ポテンショメータ) ・ 上半身の姿勢の変化を計測するためのレートジャイロ ・ 動作時の HAL の傾きを計測するための加速度センサ(傾斜計) ・ 足底の接地情報の検出や重心位置の判定を行うための床反力センサ ・ 筋活動により発生する生体信号を,皮膚表面で計測するための生体電位信号センサ ・ モータ駆動電流を計測するための電流センサ を装備している.なお,レートジャイロに関しては本章 3 節で改めて詳説する.また, 本システムの床反力センサは,装着者の各脚足裏の爪先部と踵部にそれぞれ 1 個ずつの 圧力センサが取り付けられた構造となっている. ● 制御系 制御系として制御用コンピュータを搭載している.また,OS には RT-Linux を採用し ている.
2.3
レートジャイロ
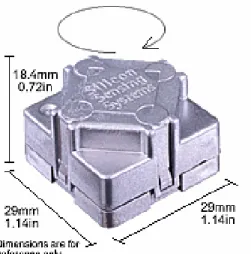
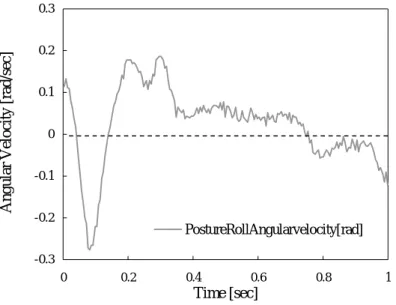
動作中の装着者の上半身の姿勢を計測するために,角速度センサとしてレートジャイロを, 水準器および加速度センサ(傾斜計)とともに上半身の背中部分に装着した(図2.3).本研 究では,シリコンセンシングシステムズジャパン製のシリコン振動ジャイロ「CRS03-02」(図 2.4)を採用した.その仕様を表 2.1 に示す.1 個のセンサで1軸の角速度が計測可能である ので,Pitch 軸,Roll 軸,Yaw 軸の計 3 個のセンサを利用し,図 2.3 に示されるジャイロボ ックスに収納している. なお,動作開始時の装着者の姿勢を初期値として,このセンサで得られた角速度情報を積 分していくことによって,動作中の上半身の絶対角度を知ることが可能である.ただし,表 2.1 に示すとおり,センサに供給している電圧値の 50%がバイアスとなり静止時の速度を示 しているが,この値に関してノイズや供給電圧のずれ等が原因となって,静止時速度の設定 値電圧と実際の静止時センサ出力電圧にずれが生じている(図 2.5)場合,このずれも積分 されてしまい正確な角度データが得られないという問題がある.そこで本システムでは,実 験での各動作前に静止状態のセンサ出力電圧を1 秒間計測し,そのデータの平均値を静止時 速度として利用することにした.これによって,静止時電圧のずれが原因で角度データがド リフトしてしまう問題(図2.6)を解決している. 図 2.3 上半身姿勢計測システム
図 2.4 シリコン振動ジャイロ
表 2.1 シリコン振動ジャイロ仕様
Supply Voltage 5.0[V] Rate Range ±100[deg/sec] Scale Factor 20[mV/(deg/sec)] Scale Factor Variation with Temperature ±3[%]
Bias 50[% (of Vdd)] Bias Initial Error ±60[mV] Bias Variation with Temperature ±60[mV]
Cross Axis Sensitivity 1[%]
Current Dissipation (not more than) 50[mV]
)
5
(
2
1
0 dd a ddV
SF
R
V
V
=
×
+
×
×
( 2.1 )where:
V
o: Rate Output[V],V
dd: Supply Voltage[V],a
-0.3 -0.2 -0.1 0 0.1 0.2 0.3 0 0.2 0.4 0.6 0.8 1 Time [sec] An
gular Velocity [rad/s
ec] PostureRollAngularvelocity[rad] 図 2.5 レートジャイロ静止時設定値電圧のずれ 本来なら計測開始時の速度は 0[rad/sec]であるはずだが,静止時設定値電圧のずれが存在する ために,上図のように計測開始時から既に速度を持ってしまっていると考えられる.このオフセ ットが積分されていることで,下図のような角度データのドリフトを引き起こしている.なお, ここで示したデータは,歩行中の上半身Roll 軸回りの角度と角速度の変化である. -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0 5 10 15 20 Time [sec] A ngle [ ra d] , A n gula r V eloc ity [ ra d/se c] PostureRollAngularvelocity[rad] PostureRollAngle[rad] 図 2.6 静止時設定電圧のずれに起因する角度データのドリフト
2.4
歩行器
本研究では,下半身不随の障害者に対する歩行支援を行う際に,姿勢制御の補助さらには HAL 装着時の障害者への安全対策を目的として歩行器を使用する.本研究で採用する歩行器 は,星光医療器製作所の折りたたみ歩行補助器「アルコーDX」である(図 2.7(a)). 本節では,家庭や医療機関で使用されている歩行器を挙げた上で本商品の仕様および特徴 を示し,本商品を採用した経緯を述べる.さらに,本実験に際して行った歩行器の改良につ いて説明する. (a)「アルコーDX」 (b)「アルコー1 型」 図 2.7 歩行器 2.4.1 歩行器について 杖を使用しての歩行に不安を感じる場合,両手で体重を支えることができる歩行器を使用 することで左右のバランスも取りやすく安定領域が広がるため,より安定した歩行が可能と なる.歩行器には,主に 1) 両手で歩行器を持ち上げて前に出しながら移動する固定型四脚歩行器 2) 左右の握り部分を斜めにずらしながら手足を交互に進めていく交互型四脚歩行器 3) 病院等の医療機関で使用されている車輪タイプの歩行器 4) 在宅向けで外出などにも利用可能な歩行補助車 がある.本研究で使用する歩行器「アルコーDX」は,このうち4のタイプに分類される歩行 器で,広くフラットな環境で使用する場合には安定性が高く有用である.表 2.2 にアルコー DX の仕様を示す.表 2.2 歩行器仕様 幅(内寸) 580 [mm] (425[mm]) 奥行(内寸) 640[mm] (585[mm]) 高さ(調整可能) 850∼1200[mm] 重量 13[kg] この歩行器の特徴は,安定性を考慮して幅が広く設計されている点と,身長や体格の違い, 使用者の好みに合わせて高さの調整が可能である点が挙げられる.またこの歩行器には上部 にマットが装着されており,ハンドル部分を持って押しながら歩行するだけではなく,上部 マットに肘を乗せたり,脇に抱え込んだりしてより楽な姿勢で使用者が歩行を行えるように 設計されている.さらにこの歩行器は,左右一本ずつの支柱で支える構造となっていること も特徴の一つである.同じく星光医療器製作所製の同型歩行器「アルコー1 型」(図 2.7(b)) と比較してもその構造はシンプルであることが分かる.通常多くの歩行器は HAL 装着者が 使用した場合に歩行中,その支柱と装着者の体側に固定されているアクチュエータ部が接触 してしまい,歩行動作の障害となってしまう問題があった.図2.8 の 3 枚の連続写真は,歩 行器使用の歩行中に右脚の振り出しを行った瞬間に右脚膝関節のアクチュエータが歩行器に 接触し,振り出しが阻害されてしまっている様子を示している.この点でアルコーDX は構 造上接触の可能性が低く,本研究の使用に耐えうると判断した. 図 2.8 歩行器とアクチュエータの接触
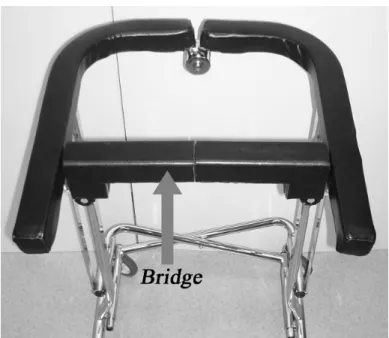
2.4.2 歩行器の改良 前項で述べたように,HAL を装着した状態での使用が可能であるかどうかに着目して歩行 器の選定を行った.しかし実際にはこの歩行器を使用した場合でも,歩行中に HAL 装着者 の上半身がU 字の上部マットの奥に入り込んでしまうと,アクチュエータとの接触が起きて しまう可能性があることが実験の結果分かった.その様子を示した写真が図2.9 である. このことから体が前側に入り込み過ぎないように対処する必要があった.そこで本研究で は,U 字の上部マット部に図 2.10 に見られるようなブリッジを取り付けることにした.こ れによって前側への体の入り込みを防止できるだけでなく,製作したブリッジがない状態に 比べて上半身を歩行器にもたれ掛からせることが可能になり,本研究で想定している下半身 不随の障害者が使用する場合の負荷軽減も十分に期待できる歩行器となった.図2.11 が本研 究で使用する歩行器のブリッジ取り付け後の外観とその使用風景である. 図 2.9 上半身の前傾による歩行器とアクチュエータの接触
図 2.10 製作した上部マット部のブリッジ
(a) 外観 (b) 使用風景 図 2.11 本研究で用いる歩行器(改良後)
2.5
まとめ
本章では,本研究で用いるロボットスーツ HAL-3 の構成と,装着者の動作意思推定を行 うために開発を行ったレートジャイロ,ならびに実験に用いる歩行器に関して述べた.
次章以降,HAL-3 をはじめとするこれらのシステムを用いて,本研究で提案する下半身不 随の障害者を対象とした歩行支援手法の有効性を実証する.
第3章
歩行支援のための目標軌道生成
障害者の歩行支援を行う際に,予め用意しておいた健常者の歩行パターンに基づいた脚の 動きを実現する機能の開発は,単に脚を前に振り出して装着者を前進させることができると いう点に止まらず,より人間の運動特性に適した歩行動作を実現できるという点で重要であ る.そこで本研究では,健常者歩行の関節角度軌道に,HAL 装着者の関節角度を追従させる ような軌道追従制御を行い,より健常者歩行に近い歩行動作の実現を目指す.実際には目標 軌道として,下肢関節角度データと角速度データを用いたPD 制御を行っている.この関節 軌道追従制御のブロック線図を図3.1 に示す.制御における目標角度・角速度,HAL の計測 系から得られる角度・角速度,目標値との誤差ならびにアクチュエータへの指令電圧は,式 (3.1)から式(3.5)を満たすものとする. 図 3.1 軌道追従制御ブロック線図T LK ref RK ref LH ref RH ref LK ref RK ref LH ref RH ref ref q q q q q q q q = _ _ _ _ _ _ _ _ & & & & q ( 3.1 ) T LK RK LH RH LK RK LH RH
q
q
q
q
q
q
q
q
=
&
&
&
&
q
( 3.2 )q
q
e
=
ref−
( 3.3 ) = LK d RK d LH d RH d LK p RK p LH p RH p k k k k k k k k _ _ _ _ _ _ _ _ k ( 3.4 ) ke τ= ( 3.5 ) 目標左膝関節角度 目標右膝関節角度 目標左股関節角度 目標右股関節角度 : : : : _ _ _ _ LK ref RK ref LH ref RH ref q q q q 目標左膝関節角速度 目標右膝関節角速度 目標左股関節角速度 目標右股関節角速度 : : : : _ _ _ _ LK ref RK ref LH ref RH ref q q q q & & & & 左膝関節角度 右膝関節角度 左股関節角度 右股関節角度 : : : : LK RK LH RH q q q q 左膝関節角速度 右膝関節角速度 左股関節角速度 右股関節角速度 : : : : LK RK LH RH q q q q & & & & ゲイン 左膝関節 ゲイン 右膝関節 ゲイン 左股関節 ゲイン 右股関節 P k P k P k P k LK p RK p LH p RH p : : : : _ _ _ _ ゲイン 左膝関節 ゲイン 右膝関節 ゲイン 左股関節 ゲイン 右股関節 D k D k D k D k LK d RK d LH d RH d : : : : _ _ _ _ なお,実際にアクチュエータへの指令電圧となるのは,τ
の対角成分である.本章では,軌道追従を行うために予め準備しておく健常者の歩行パターンに基づいた目標 軌道に関する基本概念を示し,実際に歩行支援のための目標歩行軌道を生成するための方法 について説明する. さらに実際の歩行支援では,単に HAL によって目標軌道を再現するのではなく,装着者 の意図するタイミングに合わせて,得られた目標軌道を提供する必要があるが,適切な目標 軌道の提供方法に関しては第4 章で改めて詳説することにする.
3.1
目標軌道生成の基本概念
3.1.1 健常者歩行パターンによる全軌道追従制御実験の結果 HAL をモーションキャプチャシステムとして利用して,健常者である装着者が動作を行う ことで,動作中の関節角度や角速度等のデータが得られるため,健常者の歩行中の動作パタ ーンを獲得することは容易である.しかし,ある健常者の計測から得られた数歩分の歩行軌 道そのものを,障害者歩行支援のための目標軌道として利用することは,必ずしも効果的な 歩行支援が行えるとは限らない. 図3.2 の(a)(b)(c)は,ある健常者の歩行パターンを障害者に対する歩行支援のための軌道追 従目標として利用した際の,HAL 装着者(障害者)の左脚股関節角度と目標角度データを示 している.ここで用いた目標歩行軌道とは,健常者歩行の計測で得られた下肢関節角度パタ ーンそのものであり,数歩分のパターンを一連の歩行パターンとして扱っている.本研究で は,このような目標パターンに追従させる制御を全軌道追従制御と呼ぶことにする.なお, この実験を行った障害者は右脚下腿が義足で,現在は姿勢の制御に不安を感じており,歩行 には松葉杖を使用している.左脚には障害がないものの筋力の低下を感じている状況であっ た.この実験で歩行支援対象となった障害者とパターン提供者の身体パラメータを,表 3.1 に示す. 表 3.1 支援対象者とパターン提供者の身体パラメータの比較 支援対象者 パターン提供者 身長 [cm] 177 168 体重 [kg] 72.5 62 大腿長 [cm] (Right/Left) 44/44 39/38 下腿長 [cm] (Right/Left) 義足/45 37/37この実験では,対象者の障害や身体特性を踏まえて安全のために,目標軌道となる歩行パ ターンの獲得に際して,計測を行う健常者に歩行周期を極端に遅くするように指示した.そ のため歩行1 周期に約 5 秒を要する極端に低速度の歩行パターンとなっている.図 3.2(a)は 数歩分のデータであり,概ね目標パターンに追従しているように見えるが,この実験時に装 着者に対して行った歩行支援に関するアンケートでは, ・ 歩行中の脚の振り出し等のタイミングに違和感があること. ・ 歩行周期が遅いこと. ・ HAL 装着によって脚が動かしにくくなり重く感じること. などの回答があった.そこでさらに,脚の振り出し期や支持期など短いスパンでデータを解 析してみた. 図3.2 (b)が脚の振り出しから着地までの股関節屈曲時のデータ,図 3.2 (c)が主に支持脚期 である伸展時のデータである.図3.2 (b)では最大約 50%の目標角度とのずれが生じている. この場合,装着者が想定している歩幅以上に HAL は装着者の股関節を屈曲させようとして いることになり違和感の原因の一つであると考えられる. さらに図3.2 (c)では,グラフ中の約 30[sec]以前では目標角度に追従するように,目標軌道 からやや遅れて装着者の関節角度が伸展しているのに対して,30[sec]以降では逆に装着者の 関節角度が目標角度を追い越して伸展しようとしていることが分かる.さらに31[sec]以降で はその伸展方向への角度変化が大きくなりすぎるために,制御によっておよそ 0.1[rad]の誤 差を残したまま約1 秒間一定角度で維持させられていることが分かる.このことは,本来な ら装着者は目標角度より速く伸展を行おうとしていたにもかかわらず,支援を行う目的であ ったはずの HAL によってその動きが阻害されてしまっていたことを意味し,装着者に歩行 周期に対する違和感や重量感を与えてしまったと考えられる. 一方,同様の実験を健常者に対して行った際の角度変化のデータが図3.3 の(a)(b)(c)である. この実験では,ある健常者の歩行パターンを計測し,そのパターンを同じ健常者に提供し, 歩行支援を行った.図3.3 (a)が数歩分のデータ,(b)が左脚股関節屈曲時のデータ,(c)が同じ く左脚股関節伸展時のデータである. これらのデータからは,屈曲時・伸展時ともに最大数十[msec]の遅れが見られるものの, 目標角度に先行して関節動作が行われたり,目標から大きく外れたりしていた障害者への歩 行支援実験の結果と比較して.概ね HAL から効果的な支援を受けながら歩行が行われてい ると言える.実験後に行った支援に関するアンケートでも,支援を受けていることを感じな がら楽に歩行が行えていたという回答を得ることができた.
3.1.2 健常者歩行パターンによる全軌道追従制御実験の考察 上記2 種類の実験結果を踏まえて,この軌道追従実験に関する考察を行う. 健常者による軌道追従実験では,パターンが本人のものであったことと,装着者が健常で あったことで,HAL によって提供される歩行パターンの歩行周期や歩幅等に装着者が違和感 を受けにくく,またパターンに自身の動作を適応させやすい状況にあったと言える.これに 対して障害者による軌道追従実験では,表3.1 からも分かるように,パターンそのものが身 長や下肢の長さ等の身体的特性が異なる他者から計測されたものであるため,装着者は違和 感を受けやすい.また想定する歩行周期や歩幅等の動作意思を装着者から読み取り,それを 反映する仕組みが存在せず,装着者がパターンの歩行周期が遅いと感じても,それを速める などの調整を行うことができなかった.加えて障害者のため,不慣れな動作パターンにタイ ミング等を合わせることが困難であったと考えられる. 以上のような原因により,ある健常者の歩行動作から獲得した数歩分の歩行動作パターン をそのまま他者特に障害者に,軌道追従制御の目標軌道として適用した場合,装着者に違和 感を与え,所望の動作を実現できないという結果を引き起こしてしまうと考えられる. なお,上記実験では目標パターンそのものに追従することを目的としていたが,実際に障 害者の歩行支援を行う場合には,健常者の歩行から計測した歩数の範囲内でしか歩行できな いのではなく,装着者が自由に移動できるような目標軌道の提供を行わなければならない. その場合,目標軌道の生成では,代表的な歩行1 周期分のパターンを用意し,それとは別に 動作開始時と終了時のパターンを用意することが考えられる.これによって,定常歩行中に は1周期分の代表パターンを繰り返し利用することができるため,歩数の限界がなくなり自 由な歩行が実現でき,また歩行開始時および停止時の支援にも対応可能となる.
-0.4 0 0.4 0.8 1.2 15 20 25 30 35 40 45 Time [sec] Angle [rad] LeftHipAngle refLeftHip (a) パターン追従状況 -0.4 0 0.4 0.8 1.2 20 20.5 21 21.5 22 Time [sec] Ang le [rad] LeftHipAngle refLeftHip (b) 屈曲時の角度変化 -0.4 0 0.4 0.8 1.2 28 29 30 31 32 33
Time [sec]
A
ngl
e [
ra
d]
LeftHipAngle refLeftHip (c) 伸展時の角度変化 図 3.2 目標パターンと全軌道追従制御時の障害者の関節角度変化-0.4 -0.2 0 0.2 0.4 0.6 0.8 5 7 9 11 13 15 17 19 Time [sec] Angl e [rad] LeftHipAngle refLeftHip (a) パターン追従状況 -0.4 -0.2 0 0.2 0.4 0.6 0.8 14 14.2 14.4 14.6 14.8 15 Time [sec] Angle [ ra d ] LeftHipAngle refLeftHip (b) 屈曲時の角度変化 -0.4 -0.2 0 0.2 0.4 0.6 0.8 14.5 15 15.5 16 16.5 Time [sec] Angle [ ra d ] LeftHipAngle refLeftHip (c) 伸展時の角度変化 図 3.3 目標パターンと全軌道追従制御時の健常者の関節角度変化
3.1.3 軌道追従に用いる目標歩行軌道の条件 前項の考察を受けて,本項では軌道追従に用いる目標軌道に求められる条件についてまと めておく. [条件 1] 装着者の身体的特徴(下肢の長さや身長,体重等)に近い特徴を有する健常者によ る歩行パターンであること. [条件 2] 装着者が自由な歩数を移動できるように,代表パターンを 1 周期分用意し,そのパ ターンが連続的に繰り返される仕組みにすること. [条件 3] 装着者の動作意思を反映して,歩行周期の調整が可能であること. [条件 4] 歩幅の調整が可能であること. [条件 5] 歩行中の装着者の状態(遊脚期か支持脚期かなど)に応じて,提供する目標軌道を 適切に切り替えられる仕組みを有していること. [条件 6] 歩き始めや停止時にも装着者が違和感を受けないように,定常歩行中以外の期間に も対応可能であること. [条件 7] 著しい左右差など,パターン計測を行った健常者動作の癖が顕著に現れていないパ ターンであること.
3.2
目標軌道の生成方法
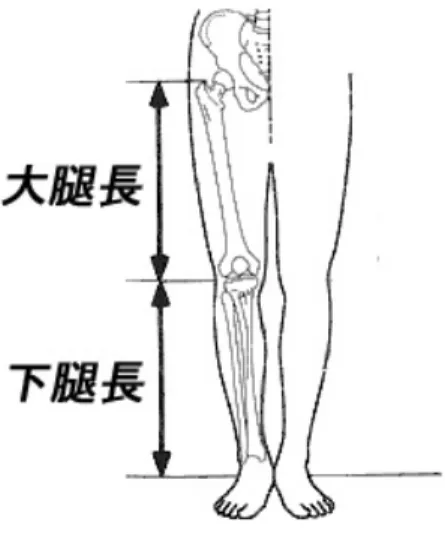
目標軌道の生成には,以下の手続きが必要となる. 1)複数人の健常者の歩行を計測. 2)歩行支援の対象となる障害者の身体パラメータを計測し,目標軌道生成に相応しい健常 者のパターンを選定. 3)2 で選定された健常者の歩行中の関節角度データから,仮の目標軌道を生成. そこで本節では,それぞれの手続きについて詳説する.なお,3 で生成される目標軌道は, 障害者の歩行支援を行う前に予め用意しておかなければならない角度パターンであるが,実 際に軌道追従による歩行支援を行う際には,再度装着者の動作意思や動作中の状態に応じた 軌道の修正が必要である.そのためここでは仮目標軌道と表現した. 3.2.1 健常者の歩行計測 健常者に HAL を装着した状態で歩行を行ってもらい,歩行中の関節角度データを計測す る.この際に,HAL は歩行支援機能が働いていない状態で,モーションキャプチャシステム として利用する.但し,HAL の重量,アクチュエータの粘性や静止摩擦は装着者にとって負 荷となるため,それらの補償のみ HAL のアクチュエータが行っておく.これによって装着 者は HAL の機構的拘束を感じることなく通常の歩行が行える.なお本研究では,障害者は 姿勢の安定化のため歩行器を利用することが前提となっており,障害者への歩行支援時と同 様の姿勢で角度パターンが計測できるように,健常者の計測においても歩行器を利用するこ とにする. 3.2.2 障害者の身体パラメータ計測と健常者パターンの選定 より近い体形の健常者による目標歩行軌道を提供し,動作中装着者に違和感を与える可能 性を低減させるために,対象となる障害者の身体パラメータを計測する.このパラメータと, 予め歩行パターンの計測を行っておいた複数の健常者のデータを比較することで,より適切 な健常者パターンを選定できるようになっている.なお,ここで扱う身体パラメータは,身 長と体重,および図3.4 に示す大腿長と下腿長[23]の 4 種類である.3.2.3 仮目標軌道の生成 仮目標軌道は以下で述べるStep 1 から Step 7 の手続きに従って,歩行計測終了直後に, 歩行中の一連の関節角度データに基づいた角度パターンとして生成される.実際に健常者の 歩行計測によって得られた右脚下肢関節角度データの一例を図3.5 に示す. また以下の説明中で示すグラフ等は図3.5 と同一歩行のデータから作成しており,左右の 脚で同一手法を用いて軌道生成を行っているため,右脚のデータに着目して説明する.さら に,詳しい軌道生成手法の説明では,右股関節のデータを例として取り上げることにする. -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 5 10 15 20 25
Time[sec]
A
n
gle
[r
ad]
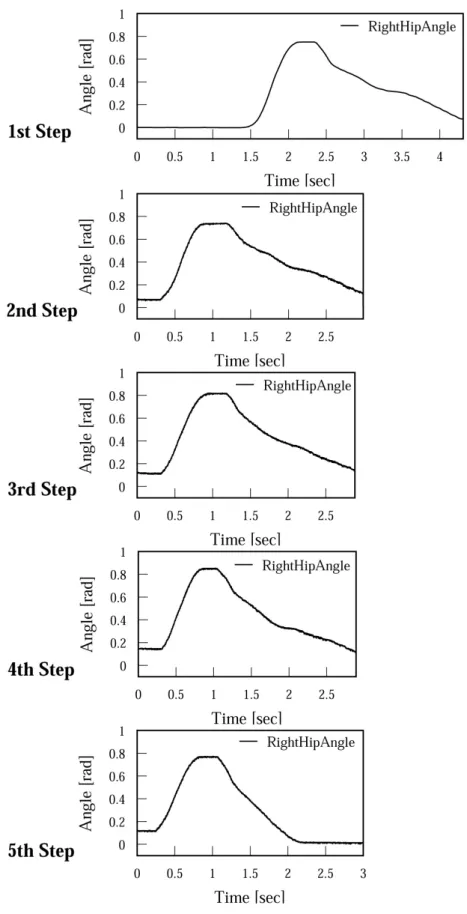
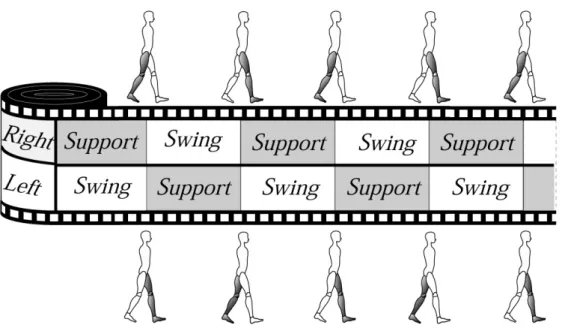
RightHipAngle[rad] RightKneeAngle[rad] 図 3.5 ある健常者歩行の右脚下肢関節角度データ[Step 1] 計測された角度データを 1 周期毎のパターンに分解. 歩行中の装着者の床反力データから,支持脚期から遊脚期への切り替わり時刻で関節角度 データを分解する.なお本研究ではこれ以降度々,歩行 1 周期を歩行中の脚の状態によっ て遊脚期と支持脚期の 2 種類の期間に分割して考えていく.またそれぞれの期間は Phase (相)と呼ばれる単位で扱うことにする.つまり歩行1 周期は,遊脚期と支持脚期の 2Phase から成り立つことになる.図3.6 (a)と(b)は計測された左右の床反力センサのデータで,爪 先側,踵側の両センサ出力を示している.本研究では爪先側,踵側の両センサ出力を合計し た値を指標として用いることにする.図3.7 (a)が右脚, 図 3.7 (b)が左脚の合計値データで ある.このデータから,支持脚期から遊脚期に遷移する時刻を自動抽出する. 本研究では,右脚の支持脚期から遊脚期への Phase 切り替わり時刻は,左脚センサ出力 が右脚センサ出力を上回る瞬間の時刻を抽出することとした.つまり本手法は重心移動が直 接反映され,どちらかの脚に重心を移動させると必然的に Phase の遷移と判定される仕組 みである.またこの手法で抽出される時刻は,実際の支持脚期から遊脚期への遷移時刻(こ れから前へ振り出される脚の爪先が完全に床から離れる時刻)より早い(図3.8).しかし, 本研究におけるPhase の切り替わりは単に足裏が床面に接地しているかどうかではなく, 歩行支援中の装着者が次の Phase に遷移できるかどうかの判断基準としての意味を持つ. そのため,図 3.8 からも分かるように,既に下肢関節の屈曲動作が始まってしまった後に Phase が遷移したと判定される手法よりも早い時刻を抽出できる本手法は,アシスト対象 者の状態や動作意思を推定しながら歩行支援を行うための軌道生成に適していると言える. この手法で抽出されたPhase 遷移時刻に基づいて,一連の関節角度データを歩行 1 周期 分の角度データに分解する.分解される前の右脚の角度データを図 3.9 に,分解された 1 周期毎の右脚股関節角度のデータを図3.10 に示す. なおStep 1 では,支持脚期から遊脚期に遷移する時刻を自動抽出するのと同時に,遊脚 期から支持脚期に遷移する時刻の自動抽出も行っている.上記手法同様,右脚の遊脚期から 支持脚期への Phase 切り替わり時刻は,右脚センサ出力が左脚センサ出力を上回る瞬間の 時刻を抽出することとした.一方ここで抽出される右脚の遊脚期から支持脚期への Phase 切り替わり時刻は,左脚が遊脚期に遷移する時刻と一致しており,左右の脚のPhase は図 3.11 に示す関係にあることが分かる.抽出された遊脚期から支持脚期への Phase 切り替わ り時刻は,目標角度パターンの切り出しには利用しないが,1 周期分の角度パターン中での 遊脚期と支持脚期の割合の算出に利用され,Step 7 で述べる各 Phase(遊脚期と支持脚期) でのパターン生成に重要なパラメータとなる.詳細は改めてStep 7 で述べることにする. さらに,Step 1 で定義する遊脚期および支持脚期は,脚が床面に接地しているかまたは 接地していないかという基準で定義される,一般的な遊脚期・支持脚期の定義とは異なるた め,注意が必要である.
0 100 200 300 400 500 600 5 10 15 20 25 Time[sec] FRF[N] RightFrontFRF[N] RightRearFRF[N] (a) 右脚用センサ 0 100 200 300 400 500 600 700 5 10 15 20 25 Time[sec] FRF[N] LeftFrontFRF[N] LeftRearFRF[N] (b) 左脚用センサ 図 3.6 床反力センサ出力 0 100 200 300 400 500 600 700 5 10 15 20 25 Time[sec] FRF[N] RightFRF[N] (a) 右脚床反力(床反力センサ前後の合計値) 0 100 200 300 400 500 600 700 5 10 15 20 25
Time[sec]
FRF[N]
LeftFRF[N] (b) 左脚床反力(床反力センサ前後の合計値) 図 3.7 床反力データ図 3.8 Phase 遷移時刻付近での関節角度の挙動
[Step 2] Step 1 で分解されたデータから平均の歩行周期を計算. 人間は常に同じよう歩行を行っているつもりでも必ず揺らぎが存在し,角度パターンや周 期は常に一定ではない.そのためStep 1 で分解された 1 周期毎の角度データは,それぞれ パターンや周期が異なっていることは明らかであり,これらの分解された角度データから平 均的な角度パターンを算出する必要がある.Step 2 ではまず,複数歩分の角度パターンか らそれらの平均周期を算出する.既に各パターンの周期はStep 1 パターンの分解の段階で 確認されており,それらの情報から平均値を求めることになる. しかし,図3.10 のグラフを見ても明らかなように,歩行開始直後や停止直前の角度パタ ーン(図3.10 の 1st step と 5th step)は定常歩行中のパターンと比べて,角度変化や周期 が異なる.一方,定常歩行を行っていると考えられる歩行動作中頃のパターンは,どれも同 様なパターンとなっている(図3.10 の 2nd step,3rd step,4thstep).そこで平均値の算 出およびこれ以降の手続き(Step 3,Step 4)では,歩行開始直後と停止直前のパターンを 自動的に除き,それ以外のデータを基に処理を行う.なお,歩行開始直後と停止前のパター ンについては別途用意する. [Step 3] 分解された複数の角度パターンを,Step 2 で算出される平均歩行周期に規格化. 分解されたパターンは周期がそれぞれ異なるため,そのままでは平均パターンを求めるこ とが困難である.そこで,平均周期よりも長い周期を持つパターンはデータを間引くことで 所望のパターン周期に調整し,短い周期を持つパターンはデータを補間することで調整する. ここではパターンの周期調整を行うアルゴリズムについて説明する. まず,元の歩行角度パターンのデータ数をn,平均周期の調整を行った場合の角度パター ンのデータ数をn′とすると,
n
n
′
=
α
( 3.6 ) で表される周期の調整定数α
を求め,周期調整後のパターンの各データ番号にα
を乗じる. ここで述べるデータ番号とは,Step 2 で求めた歩行の平均周期をτ
とおいたとき,本シス テムの計測周期が1[msec]となっているので,0 から1000τ
までの昇順に並んだ整数である. つまりτ
とn′の間には, 1 1000 + = ′τ
n ( 3.7 ) で表される関係がある. さらに,周期調整後のパターンのデータ番号にα
を乗じた結果を小数点以下で四捨五入 して得られる整数が,周期調整後にパターンデータとして適用される元データの番号となる. 8 = n ,n′=6としてデータの間引きを行い,パターンを平均周期に縮小した場合の一連の 流れとその結果をそれぞれ図3.12 (a)と(b)に,同じくn=8,n′=10としてデータの補間を 行いパターンを平均周期に拡大した場合の一連の流れとその結果をそれぞれ図 3.13 (a)と (b)に示す.なお,図中のA
iは,元の角度パターンにおけるデータ番号i
の角度値とする.(a) データ間引きによる周期調整の流れ
1 段目:元パターンのデータ番号,2 段目:調整比率を乗じた結果,
3 段目:上段の数値を四捨五入した結果,4 段目:周期調整後に適用される元データ.
(b) 縮小の結果
(a) データ補間による周期調整の流れ
1 段目:元パターンのデータ番号,2 段目:調整比率を乗じた結果,
3 段目:上段の数値を四捨五入した結果,4 段目:周期調整後に適用される元データ.
(b) 縮小の結果
[Step 4] 規格化されて周期が等しい複数の角度パターンから平均のパターンを算出. Step 3 の調整によって周期が等しくなった複数のパターンにおいて,各データ番号に対 応する角度データの平均値を算出する. Step 3 で規格化された図 3.5 の歩行の 2 歩目,3 歩目,4 歩目の右股関節角度パターンを図 3.14 に,それらの平均値を計算することで得ら れる平均的な角度パターンを図3.15 に示す. 図 3.14 規格化された角度パターン(右股関節) 図 3.15 平均的な角度パターン(右股関節)
[Step 5] 角度パターンのオフセットを除去. 人の歩行では,下肢関節がほぼ伸びきる時間帯があり,股関節では支持脚期から遊脚期に 移行する際の僅かな期間に,膝関節では遊脚期に前方へ脚を振り出してから着地するまでの 期間と,着地した後の支持脚期前半に見られる[24].しかし図 3.15 からも分かるように, これまでの過程で導出された角度パターンには必ず,関節が伸びきる 0[rad]からのオフセ ットが存在しており,関節が伸びきる期間が見られる.この要因としてはHAL の装着ずれ 等が考えられる. そもそも角度追従によって歩行支援を行う場合,歩行中本来関節が伸びきっているであろ う期間に目標角度パターンにある角度が存在していることは, HAL のアクチュエータに非 常に大きな負担となる.このことは人の歩行にも当てはまり,常に中腰姿勢で歩行を行った 場合に膝や腰に負担を受けることは容易に想像できる.特に自重によって最も負担を受けや すい支持脚期には敢えて膝関節を伸ばす戦略をとることで,人は筋への負担を劇的に軽減さ せている.図3.16 では関節を曲げた姿勢と,関節を伸ばしきった姿勢の比較を示している. (a)では自重を支えるために式(3.8)で表される関節トルクが必要となるのに対して,(b)では, 理論的にはトルクが必要ないことが分かる.つまり(b)のような姿勢をとることで,装着者 の体重を支えなければならない支持脚期にアクチュエータへの負荷が増大し,出力トルクの 限界に達するなどの状況に陥り,体重を支持できなくなるといった危険性を回避できる.
mgl
knee=
τ
( 3.8 ) (a) 膝関節屈曲時 (b) 完全直立状態 図 3.16 姿勢による下肢関節にかかる負荷の違い (a)では,膝関節の屈曲角度θ
が大きければ大きい程,重心位置と膝関節の水平面内での距離lが 大きくなり必然的に膝関節に必要なトルクが増大する.そこでStep 5 では,Step 4 までに得られた角度パターンのオフセットを取り除き,体重 の支持のために関節を伸ばしきりにさせておきたい期間での目標角度が 0[rad]となるよう に調整を行った.図3.17 は,オフセット除去を行う前と後のそれぞれの角度パターンを示 している.(a)が股関節,(b)が膝関節の角度パターンである. (a) 股関節角度パターン (b) 膝関節角度パターン 図 3.17 オフセット除去後の関節角度パターン
[Step 6] 角度パターンの開始時角度と終了時角度の違いを修正. 本項で準備されるべき角度パターンは,歩行支援を行う際には連結されて一連の目標歩行 パターンとなる.そのため 1 周期毎の角度パターンの開始時角度と終了時角度は等しく, また両者が滑らかに連結されるようにその角速度(角度パターンの傾き)も考慮されていな くてはならない. Step 5 までに作成されたパターンは,歩行中の一連の関節角度データを分割した 1 周期 毎のパターンを基に,それらの平均値を求めることで生成しているため,必ずしも開始時角 度と終了時角度が等しいとは限らない.図3.18 はその一例である.そこで Step 6 では,両 者の値を等しくし,さらに連結が滑らかになるように角度パターンの修正を行う.本研究で は,ヒューマノイドロボットの歩行中の滑らかな脚の軌道生成にBezier 曲線を適用した金 らの研究[25]に習い,開始時角度と終了時角度を滑らかにつなぐことにする.修正後の角度 パターンを図3.19 に示す.これより,開始時角度に滑らかに連結されるようなパターンが 描かれていることが分かる.なお,パターンの修正に用いたBezier 曲線の各パラメータは 図 3.20 に示す通りである.修正する区間(Adjust span)はパターンの外形から 0.5[sec] に設定し,開始点(Start point)では,角速度が連続となるようなパラメータを設定した.
結果,図3.21 に示されるような角度パターンが得られる.
図 3.20 パターンの修正に用いる Bezier 曲線の設定
![表 2.2 歩行器仕様 幅(内寸) 580 [mm] (425[mm]) 奥行(内寸) 640[mm] (585[mm]) 高さ(調整可能) 850∼1200[mm] 重量 13[kg] この歩行器の特徴は,安定性を考慮して幅が広く設計されている点と,身長や体格の違い, 使用者の好みに合わせて高さの調整が可能である点が挙げられる.またこの歩行器には上部 にマットが装着されており,ハンドル部分を持って押しながら歩行するだけではなく,上部 マットに肘を乗せたり,脇に抱え込んだりしてより楽な姿勢で使用](https://thumb-ap.123doks.com/thumbv2/123deta/6864389.743707/23.892.89.797.185.282/幅内寸合わせ調整られるまたマットハンドルながらマット抱え込ん.webp)