平成 26 年度
修士論文
インテリジェント短下肢装具における
エネルギー回生効率の数値シミュレーション
指導教員 井上 喜雄 教授
芝田 京子 准教授
高知工科大学 大学院 工学研究科基盤工学専攻
知能機械システム工学コース
1175025 江口 翔平
- 1 - 目次 1 章 緒言 ... 2 1.1 背景と目的 ... 2 1.2 関連研究 ... 3 1.2.1 パッシブな機構を持つ AFO ... 3 1.2.2 セミアクティブ制御を用いた AFO ... 3 1.2.3 アクティブ制御を用いた AFO ... 4 2 章 AFO と片麻痺歩行... 5 2.1 片麻痺歩行 ... 5 2.2 AFO の機能と問題点 ... 6 3 章 開発したインテリジェント AFO ... 8 3.1 概要 ... 8 3.2 歩行状態の識別... 8 3.3 DC モータによる制動トルク ... 9 3.4 制動トルクの制御とエネルギー回生 ... 10 3.4.1 コントローラ ... 10 3.4.2 昇圧チョッパ回路 ... 11 4 章 回生効率の数値シミュレーション ... 14 4.1 基礎理論 ... 14 4.2 足関節角速度の取得 ... 15 4.3 シミュレーションのパラメータ設定 ... 17 4.4 シミュレーション結果 ... 17 5 章 結言 ... 19 参考文献 ... 20 謝辞 ... 21 付録 ... 22
- 2 -
1 章 緒言
1.1 背景と目的
脳卒中障害等による片麻痺患者の多くは歩行改善や歩行補助を目的として短下肢装具 (以下 AFO:Ankle Foot Orthosis)を用いており,装具の使用によって歩行が改善されるこ とは臨床上よく知られている(1).これらの役割は麻痺によって失われた筋力の補助や,尖 足や内反などの異常状態の抑制であり直接的に足関節(足首の関節)の動きを抑制,また は間接的に膝関節,股関節などの動きに影響を与え歩行状態を改善する.現在では外観が よく安価,軽量などの点から一般的にプラスティック製の靴ベラ型 AFO(図 1.1)が多く利 用されているが,耐久性などの問題から歩行補助に必要な可撓性よりも剛性が高くなる傾 向がある.装具特性として足関節の底背屈動作に対する制動トルクは,歩行に大きく影響 を及ぼすと言われている(2).しかし,既存の装具に歩行状態ごとの制動トルクの変化を考 慮したものは少なく,装着者の歩容は健常歩行と大きく異なり,患者の麻痺状態や装具特 性によって様々な歩容を示すことになる. 図 1.1 靴ベラ型 AFO 健常歩行では足関節回りの底屈筋と背屈筋が交互に活動して足関節の動きに適切な制動 トルクをかけることにより,なめらかな歩行を実現している(3).一方,装具を装着した歩 行では装具が発生する制動トルクが筋肉の動きを補助している.そのため装具が発生する 制動トルクによって歩行は変化し,特に立脚期初期と呼ばれる踵接地から足底面接地まで の期間には様々な問題が発生する.しかしながら,既存の装具では特性によって決定する 制動トルクしか発生することができないため,歩行状態や環境に対応できず,患者は装具 に依存した歩容を強要される.このことより自然な歩行を実現するためには歩行状態に合
- 3 -
わせて適切な底背屈制動トルクを発生させる必要があると考えられる.
本研究ではこのことに着目し,歩行状態に合わせて足関節に発生する制動トルクを可変 可能なインテリジェント AFO ( 以下 IAFO:Intelligent Ankle Foot Orthosis )を開発した.こ のとき制動トルクを発生させるために DC モータの電磁ブレーキを利用し,昇圧チョッパを PWM 制御することによって制動トルクの可変を行う.また,その過程で生まれる電気エネ ルギーを回生し,制御に必要なエネルギーを補うことで,長い連続使用時間を持たせるこ とを目指している.また,効率よくエネルギーを回生することで,制御によって消費され るエネルギーをより多く補う事ができる.これにより,バッテリに持たせる余剰なエネル ギーを小さくしてバッテリの小型化を目指す. 本 論 文 で は , こ の IAFO に 搭 載 さ れ て い る 回 路 の エ ネ ル ギ ー 回 生 効 率 を , MATLAB/Simulink を用いた数値シミュレーションにより算出し,効率の良いエネルギー回 生を行うための改善案を提案する. 1.2 関連研究
近年,DACS AFO (Dorsiflexion Assist Control by Spring AFO:底屈補助機能付き AFO)の 開発研究が多く見られる.いずれも底屈動作に対する支援であり,制動トルクを歩行状態 によって変化させることによりさらなる歩行改善を図ろうというものである.しかしなが ら,AFO の選定理由として外観や使いやすさが重視される傾向にあるため,比較的大型化 するこれらの装具の利用はごく一部に限られている.これらは大きく次の 3 つに分類でき る. 1.2.1 パッシブな機構を持つ AFO パッシブな機構を持つ AFO はダンパや摩擦などのパッシブな力を用いて歩行を補助する ものであり,制御は行わない.これらはダンパや摩擦の特性を非線形にすることにより, ある底屈方向にのみ制動トルクを発生させることができる.実用化されているものとして, 山本ら(国際医療福祉大学大学院)が開発した油圧ダンパを利用した AFO がある(3).この 装具は非線形性の油圧ダンパを利用して底屈動作に対してのみ制動トルクを発生させる機 構になっている.このほかに実用化されているものとして有限会社オルソのドリームブレ ースがある(4).これは同等の機能をワンウェイクラッチで実現している.これらは共通し て機械的な構造を利用し底屈動作に対してのみ,制動トルクを発生する機構を実現してお り,制動トルクは調節用のねじによって容易に変更することができる構造になっている. 1.2.2 セミアクティブ制御を用いた AFO バネや摩擦などの特性を変化させるセミアクティブ制御を利用することによって任意に 装具特性を変化させることができる.これにより歩行状態に合わせて任意に装具特性を得
- 4 - ることが可能となる.これらはパッシブなものに比べ構造的に複雑,大型化する傾向にあ るため実用化には至っていない.本研究はこの方式を採用している.現在研究されている ものとして赤澤ら(6)が MR 流体を利用した AFO を開発している.MR 流体とは磁気によっ て粘性が変化する磁性流体で,これを利用することで足関節の粘性を任意に可変にするこ とができる.加速度センサを用いて歩行状態を検出し,遊脚期と立脚期によって粘性を変 化する実験を行い,歩行が改善されたと述べている. 1.2.3 アクティブ制御を用いた AFO アクチュエータを利用して足関節動作を積極的に支援することを目的としている.これ らはパッシブやセミアクティブのものに比べ,非常に大きな補助効果を期待することがで きるが,動力源やそれを駆動するバッテリなどにより装置が大型化するため実現が困難で あると言える. 高岩(6)ら(岡山大学)は空気圧ゴム人工筋を用いた歩行支援装置の開発を行っている.こ れはターゲットを老人など足の機能が低下し,背屈筋が十分に働かない人を対象に開発を 進めており,片麻痺患者にも適応可能である.空気圧人工筋の収縮力を利用して背屈動作 を補助することが目的である. この他,株式会社安川電機で「足首アシスト歩行装置」(7)として,モータを用いて足関節 動作を積極的に支援することを目的とした装置の開発が行われている.
- 5 -
2 章 AFO と片麻痺歩行
2.1 片麻痺歩行 ここでは片麻痺患者の症例や,それによる異常歩行である片麻痺歩行について述べる. 片麻痺歩行とは脳卒中,脳挫傷,脳腫瘍などにより身体半身の運動麻痺をきたした患者 に認められる歩行であり(1),これらの症状を持つ患者を片麻痺患者と呼ぶ.その症状は身 体的障害から知的障害へも及ぶ.身体的障害としては麻痺による不随や神経の異常伝達に よる意図しない筋肉収縮などが発生し,知的障害としては記憶力の低下や言語障害などが みられる.発症後,患者は歩行リハビリなどを行うが健常な状態まで回復する例は少なく, 発症から約半年から 1 年をすぎると身体的な回復はほとんど見られなくなる.また現在の 歩行リハビリでは健常歩行に近づけることを目的とせず,患者にとって歩きやすい歩行を 習得させることが目的であるため,片麻痺歩行と言ってもその歩容は様々である. 片麻痺歩行には健常者の歩行パターンにはみられない様々な異常歩行パターンが存在す る.代表的な例として歩行失行にみられるすくみ足歩行,パーキンソン症候群にみられる 前方突進歩行,片麻痺の分回し歩行,痙性対麻痺の挟み込み歩行などがあげられる(1).こ こで下肢関節において最も歩行に影響を与えるのが足関節であり,片麻痺患者に多く見ら れる内反,尖足また下垂足はつま先離れや踵接地を困難にする.これらの影響は足底の接 床パターンに顕著にみることができる.図 2.1 は触覚画像システムを用いて健常者と片麻痺 患者の裸足での接床パターンを記録したものである.a)は健常者,b)は 45 歳,男性,脳 卒中による左片麻痺,発症より 7 ヶ月の患者を表している.それぞれについてサンプリン グ周波数 30[Hz]で記録した画像を踵接地から爪先離床までのパターンを連番表示したもの である(1). 健常者の接床パターンでは踵から接床し,第 5 中足骨骨頭より順次第 1 中足骨骨頭へと 進み,全足底がほぼ着床後踵が浮き上がり,母趾へ抜けてゆくパターンが一般的によく知 られている.しかし片麻痺歩行の1例として,小趾球部分より着床がはじまり足底外側部 から踵,母趾球部分へと着床が進み,最後の離床部位は小趾球寄りになるパターンが認め られている.片麻痺歩行では接床パターンにおいて健常歩行のように踵から接床するケー スではなく,尖足や下垂足の影響によりつま先から先に接床するパターンがみられる.こ れは片麻痺患者の多くは底屈筋の活動が背屈筋の活動に比べ活発な状態にあることにも起 因している.- 6 - a)健常歩行 b)片麻痺歩行 図 2.1 足裏接地状態の変化 [出典,参考文献(1),p26 ] 2.2 AFO の機能と問題点 ここでは片麻痺患者が一般的に利用する AFO について,その機能と必要性,及び問題点 について述べる. 片麻痺患者は歩行改善を目的として AFO を用いており,主な目的は足関節動作の補助ま たは抑制である.AFO は様々な種類が作成されており,患者の症状や時期にあわせて医師 や理学療法士によって処方される.しかし,片麻痺歩行は個々により症状が様々であり, 処方するにあたって明確な指標がないため,常に適切な装具が処方されているとは言いが たい.そのため患者は AFO にあわせた歩行を強いられることになり,健常歩行に近い歩容 になることは少ない. 最も多く使われる AFO としてプラスティック製の靴ベラ型 AFO があげられる.(図 1.1) 靴ベラ型の様な後面支柱型の他に,前面支柱型や Saga プラスティック型,ヘミスパイラル 型,スパイラル型などがある.それぞれの特徴について以下に示す.また外観を図 2.2 に示 す. (a) 後面支柱型 AFO 最も普及しているプラスティック AFO.
- 7 - 他の AFO に比べ,底背屈方向および内がえし・外がえし方向に対して硬い. (b) 前面支柱型 AFO 底屈方向よりも背屈方向の変形に対して硬い. (c) Saga プラスティック 底背屈の両方向に対して等しい可撓性を示す.足関節角度と制動トルクの関係が線形 に近い. (d) ヘミスパイラル型 AFO 底屈方向には比較的硬く,背屈方向には柔らかい. (e) スパイラル型 AFO 底背屈両方向に柔らかい.下腿の運動のコントロールが容易であると言われている. (a) (b) (c) (d) (e) 図 2.2 さまざまな短下肢装具 歩行周期の中で最も危険が伴うのが踵接地時である.踵接地時には踵を回転中心とする 底屈方向へのトルクが発生する.正常歩行の場合,踵接地時には適切な背屈方向へのトル クを発生させることでスムーズな歩行を行うことができるが,片麻痺歩行では適切なトル クを発生することができず,様々な現象が起こる.踵接地時に底屈制動トルクが不足する 場合,足関節が急激に底屈することにより膝関節の過伸展が起こり,立脚期中常に膝関節 を伸展したままの歩行となる.また遊脚期には下垂足が発生し離床が困難となり,つまず きの危険が伴う.逆に底屈制動トルクが過剰な場合,足関節が底屈しないために下腿の前 傾が起こって膝が前方に押し出される.このため膝折れなどが発生し転倒の危険がある. 立脚期では一般的に片麻痺患者は背屈筋が優位にあるため身体が前にいくのが妨げられる. そのためこの時期に背屈制動トルクをかけることはこれを助長することになるため小さく なくてはならない.
- 8 -
3 章 開発したインテリジェント AFO
3.1 概要 開発したインテリジェント短下肢装具(以下,IAFO)を図 3.1 に示す.この IAFO は下垂 足の症状を持つ患者を対象としており,また,装置の小型化,軽量化,連続使用時間の延 長を目的として,歩行時に発生する足関節の回転エネルギーを電気エネルギーに変換しバ ッテリに充電する,エネルギー回生の技術を有している.このIAFO は既報(8)により,装着 者の歩行時の足関節角度の点においては,歩行改善に対して効果がある可能性が示されて いる. 一般的に使用されているプラスティック製 AFO に足関節継手を取り付けることで足関節 が自由に回転できるようにしたものに,歩行状態を識別するための感圧センサ,制動トル クを発生させるための DC モータ(FAULHABER 社 2657W024CR,減速機に同社の遊星ギア ヘッド・シリーズ ・ を使用),制動トルクを足関節に伝達するためのリンク機構, 制動トルクを制御すると同時にエネルギー回生を行える昇圧チョッパ回路(9)を内蔵したコ ントローラを取り付けている.それぞれについて以下で説明する. 図 3.1 IAFO 3.2 歩行状態の識別 歩行状態の判別方法として,ニッタ製感圧センサ「FlexiForce」(図3.2)を使用し,立脚 期初期における踵接地の識別を目的として,図3.3のように踵と親指の付け根の2ヵ所に設置 した.また,ノイズの影響を小さくするために感圧センサをスポンジとゴム板で挟む機構 となっている. 本研究では圧力の測定よりも足が地面に触れているかを判断することに重点をおいて使 用するため測定範囲は狭いが感度のよい最大測定荷重 4.4[N]の A201.1 を使用した.- 9 - 図 3.2 感圧センサ 図 3.3 感圧センサ取り付け位置 3.3 DC モータによる制動トルク DC モータは回転に伴い,回転速度 に比例した電圧が端子間に発生する.この誘導電圧 は次式で表せる. ( は誘導電圧定数) (3.1) このことより DC モータは回転エネルギーから電気エネルギーに変換する発電機として利 用することができることがわかる.このとき端子間に負荷が接続されていればコイルに電 機子電流 が流れ,これによって制動トルクが発生する(この現象を本研究では電磁ブレー キと呼ぶ).この制動トルク は次式で表される. ( :誘導電圧定数) (3.2) これより, を調整することによって制動トルクを変化させることが可能な制動機であるこ とがわかる. ここで,端子間に接続された負荷 が一定の値であればオームの法則( ),式(3.1), 式(3.2)より次式が成り立つ.
- 10 - ( と は単位を揃えると同一の値 ) (3.3) これより負荷が一定の場合,DC モータは回転速度に比例した制動トルクを発生する減衰定 数 の回転減衰であると見なせる. 本研究では,式(3.2)の電流 を変化させることで任意の制動トルクを得る.電流 を変化さ せる方法については 3.4.2 節で述べる. 3.4 制動トルクの制御とエネルギー回生 この節ではコントローラの構成,制動トルクの制御とエネルギー回生を同時に行うこと のできる昇圧チョッパ回路(9)について述べる. 3.4.1 コントローラ コントローラは,フラッシュマイコン H8/3694F を中心に昇圧チョッパ回路が構成されて おり,感圧センサの値から歩行状態を判別し,それに対応した制動トルクの制御を行う. 同時に, DC モータから発生した電気エネルギーを昇圧チョッパ回路を利用してバッテリ に充電する.図 3.4 にコントローラ基盤と構成部品を示す. ①マイコン … AKI-H8/3694F フラットマイコン.
②整流用ショットキーダイオード … PANJIT INTERNATIONAL Inc. 1S4 ③バッテリ … SANYO HR-4UTGB ×4 (約 5[V])
④モータ接続用コネクタ … 日本圧着端子製造 B02B-XASK-1 ⑤コイル … TDK 株式会社 SF-T12-50-PF
⑥MOS-FET … 株式会社東芝 2SK4017
- 11 - 図 3.4 コントローラ基盤 3.4.2 昇圧チョッパ回路 チョッパ回路とは直流電圧を任意の大きさの直流電圧へ変換したい時に使用するもので ある.スイッチング素子(IAFO においては MOS-FET)を用いて高速にスイッチングを行 い,ON 時間 と OFF 時間 の比を制御(PWM 制御)することで負荷にかかる平均電圧 を制御することができる.この比をデューティ比 と呼び,次式で表わされる. (0≦d≦1) (3.4) チョッパには入力電圧よりも低い電圧を出力する降圧チョッパと,高い電圧を出力する昇 圧チョッパがある.本研究では歩行時に DC モータが生み出す電気エネルギーが常に充電可 能な発電を行うとは限らないので,後者の昇圧チョッパを使用し発電電圧をバッテリへ充 電可能な値まで昇圧する.以下,その基本原理について説明する. 昇圧チョッパはコイルに蓄えられたエネルギーをスイッチングにより蓄積と放出を制御し昇 圧するものである.図 3.5 に,本研究で IAFO に搭載している昇圧チョッパ回路の図を示す.図 3.5 において MOS-FET が ON の時,コイル を通じて DC モータ M から電流が流れる.このと き にエネルギーが蓄積され,モータの出力電圧を とすると,電流 は時間 に比例して 増加し次式となる. ( :コイルインダクタンス) (3.5)
- 12 - ここではMOS-FETでの電圧降下は省略する.このときMOS-FETのドレイン・ソース間は飽 和電圧 となり,出力電圧 との関係は となりダイオードを通 して出力側へは電流は流れない.MOS-FETがOFFとなると には誘導起電力が発生し,ダ イオードを通してバッテリを充電し負荷電圧を上昇させる.このとき が十分大きければ, MOS-FETがONの時に回路に流れる電流 ,OFFの時に回路に流れる電流 は,一定の値 とみなすことができ,蓄えられたエネルギーとダイオードを通して放出されるエネルギー が等しいとすると次式を得る. (3.6) (3.6)を(3.4)を使って表すと, (3.7) となり, を より大きくすることが可能であることがわかる.よって, がバッ テリ電圧 よりも低い場合でも充電を行うことが出来る.また, の平均値 は, の平均値 が 期間だけ流れるため,以下の式で表わされる. (3.8) これよりDCモータに流れる電流をデューティ比 によって自由に変化させることが可能 であることがわかる. 以上の理論から,IAFOは制動トルクの制御とバッテリへの充電を同時に行う.なお,既 報(8)から,IAFOはMOS-FETのスイッチング周波数は 10[ ] で,センサ状態により表3.1 のようにデューティ比 を変化させるように設定している. 図3.5の回路において, は(3.1)式より,IAFO装着者の足関節角速度 に比例した値 であり, は歩行の中で絶えず変化する.そのため,回生効率の高い充電をする上では, の 変化による, の変化を考慮して回路のパラメータの設定を行う必要がある.
- 13 - 図3.5 IAFO に搭載した昇圧チョッパ回路 表3.1 IAFO の Duty 比設定 ① ② 90 40 離地 センサ状態 Duty比 [%] Duty比設定の理由 遊脚期の下垂足を防止 踵接地からつま先接地までブレーキをかけ, 足関節が急に開くのを防止 接地 接地 接地 離地 制動トルクが必要ない状態であるため 遊脚期の下垂足に備え,足首を固定する 離地 離地 接地 10 90
- 14 -
4 章 回生効率の数値シミュレーション
ここでは,IAFO に搭載した昇圧チョッパ回路において,より高い回生効率で充電を行う ための回路のパラメータ設定を検討するために行った,現在の IAFO に搭載されている昇 圧チョッパ回路の数値シミュレーションの方法と結果について述べる. 4.1 基礎理論 シミュレーションの対象である回路を図 4.1 に示す.この回路は,MOS-FET の ON/OFF により,電流 に関する回路方程式を切り替えることができる.MOS-FET が ON のときの 回路内の抵抗値を とすると,ON のときの回路方程式は, (4.1) ON のときの の理論解を とすると, (4.2) (4.2)式において は時間であり, は ON に切り替わる直前の回路内の電流値である.また, MOS-FET が OFF のときの回路内の抵抗値を とすると,OFF のときの回路方程式は,(4.3) OFF のときの, の理論解を とすると, (4.4) (4.4)式において, は OFF に切り替わる直前の回路内の電流値である.今回は,MOS-FET の ON/OFF の切り替えにより,(4.2)式と(4.4)式を切り替えて電流 の数値シミュレーション を行った.ここで は IAFO 装着者の足関節角速度 に比例した値であり,シミュレー ションを行う上では,IAFO 装着者の歩行時,時間と共に変化する をシミュレーションモ デルへの入力とする必要がある.
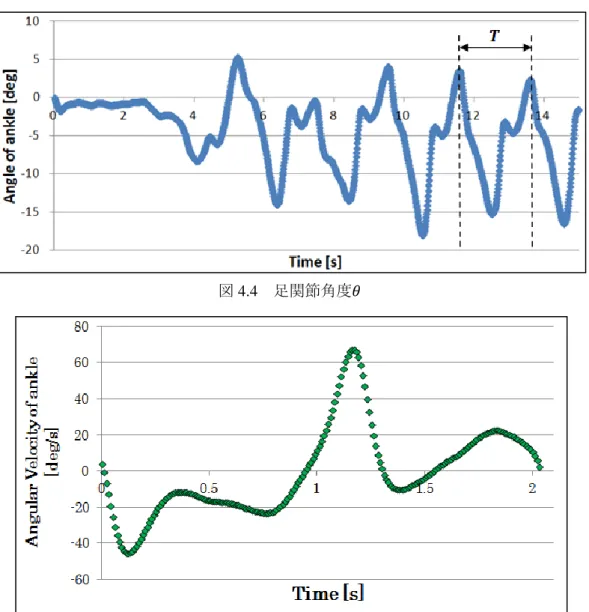
- 15 - 図 4.1 IAFO に搭載した昇圧チョッパ回路 4.2 足関節角速度の取得 今回のシミュレーションを行う上で必要な足関節角速度 を取得するために,三次元動 作解析装置(図 4.2)を用いて,IAFO 装着者の歩行中の足関節角度 を計測し, から を算 出した.条件としては,健常な 20 代の男性 1 名が IAFO を装着して片麻痺患者を模した歩 行をした時の足関節角度 を,図 4.3 のように配置したマーカの動きから計測した.片麻痺 患者を模した歩行というのは,足首に極力トルクを加えないように意識した歩行である. 歩行速度はトレッドミルを用いて歩行速度 2.0[km]で一定になるようにし,計測のサンプリ ング周期は 0.01[s] で,15[s] の間計測を行い,計測後 3[Hz] のバタワースフィルタによる ノイズ除去処理を行った.計測した を図 4.4 に示す.図 4.4 の T の区間( 11.59 ~13.62[s] ) は,定常歩行 1 周期の区間を表す.今回はこの区間 T での から を算出し, を計 算した.区間 T での を図 4.5 に示す. 図 4.2 三次元動作解析装置(奥)とトレッドミル(手前)
- 16 -
図 4.3 マーカ取り付け位置
図 4.4 足関節角度
- 17 - 4.3 シミュレーションのパラメータ設定 4.1 節の理論をもとに,MATLAB/Simulink 上でシミュレーションモデル(付録)を作成し, 4.2 節で得た IAFO 装着者の歩行 1 周期分の足関節角速度 からモータ出力電圧 を算 出し,回路への入力電圧として与えた. IAFO はリンク機構により を 2 倍にしてモータに 与えているため,今回はリンク機構による増速も考慮した.今回のシミュレーションに用 いた回路の各パラメータを表 4.1 に,モータのパラメータを表 4.2 に示す.表 4.1 の充電用 バッテリ電圧,ON 回路内抵抗 ,OFF 回路抵抗 ,コイルインダクタンス は計測 機を用いて計測した値である.また,表 4.1 のダイオード電圧降下,表 4.2 のモータのパラ メータについては仕様書の値を使用している.Duty 比については,表 3.1 および図 4.4 から, 0~0.11[s] を 40[%],0.12~0.93[s] を 10[%],0.94 ~2.03[s] を 90[%] とした.今回は,回 路の消費電力と充電電力の比較を行うためマイコンの消費電力もシミュレーション上で計 算した.マイコンのパラメータを表 4.3 に示す.表 4.3 の値は仕様書の値を参考にしている. また,シミュレーションのサンプリング周期は1[μs] としている. 表 4.1 回路の各パラメータ 充電用バッテリ電圧 7.5 [V] ダイオード電圧降下 0.5 [V] ON 回路抵抗 0.119 [Ω] OFF 回路抵抗 0.929 [Ω] コイルインダクタンス 288 [μH] PWM 周波数 10 [kHz] 表 4.2 モータのパラメータ ギア比 159 逆起電力定数 3.65 [mV/deg] モータ端子間抵抗 2.84 [Ω] モータインダクタンス 380 [μH] 表 4.3 マイコンのパラメータ 駆動電圧 5 [V] 駆動電流 30 [mA] 4.4 シミュレーション結果 今回の数値シミュレーションにより得られた,バッテリに蓄積される電力量とモータが 生み出す電力量の推移を図 4.6 に示す.本報では,MOS-FET が OFF の時に流れる電流 とバッテリ電圧 を歩行 1 周期の時間で積算したものをバッテリに蓄積される電力量, 回路に流れる電流とモータの出力電圧 を歩行 1 周期の時間で積算したものをモータが 生み出す電力量として定義している. 今回の数値シミュレーションにおいては,歩行 1 周期において,モータが生み出す電力 量は 9.103 [Ws] ,バッテリに蓄積される電力量は 1.16 [Ws] となった.本研究では,バッ テリに蓄積される電力量に対するモータが生み出す電力量の比をエネルギー回生率と定義
- 18 - しており,エネルギー回生効率は約 12.77[%] という結果となった.エネルギー回生におい て,エネルギー回生効率は 100[%] に近い値であることが求められるため,この回路におい てエネルギー回生効率向上のために回路パラメータの最適な設定が必要であるという結果 となった. 図 4.6 において,0.94[s] 以降は PWM の Duty 比を 90[%] に設定しているのだが,この 0.94[s] 以降のエネルギー回生効率が低くなっていることが確認できる.これはモータが電 力を発生させる時間に対して,バッテリが充電される時間が短いため,モータが発生させ た電力が無駄になっているためと考えられる.このため,モータのギア比を下げて無駄と なる電力を低くし,エネルギー回生効率を高めることができると考えられる. この回路の制御に必要なマイコンの消費電力量は,表 4.3 の,マイコンの駆動電圧と駆動 電流の積と,歩行 1 周期にかかる時間の積であらわされる.今回は歩行 1 周期が 2.03[s]で あるから,制御に必要なマイコンの消費電力量は約 0.3045[Ws] であり,このマイコンの消 費電力量に対するバッテリに蓄積される電力量の比は 386[%] であった.歩行の補助に必要 なエネルギーを十分得られており,また,余剰電力があることが示された.今後はマイコ ンの消費電力量を 100[%] 以上に保ちながら,よりエネルギー回生効率の高い回路を設計す ることが求められる. 提案されるエネルギー回生効率の改善方法としては,モータのギア比とリンクによる増 速比を小さくすることで,モータから発生する電流を小さくしてモータが発生するエネル ギーを小さくすることが考えられる.この提案をもとにモータのギア比を 1:60 ,リンクに よる増速比を 1:1 にすることで,エネルギー回生効率が 29.6[%] となることが確認された. また,このときのマイコンの消費電力量に対するバッテリに蓄積される電力量の比は 106[%] であり,マイコンの消費電力量を補えている.また,モータのギア比とリンクによ る増速比を小さくしたことにより,機構部分が小型になるため,装具をより小型にするこ とが可能であると考えられる. 図 4.6 電力量の推移
- 19 -
5 章 結言
本研究では,エネルギー回生を用いた IAFO による,短下肢装具の歩行改善効果の向上と エネルギー回生効率の向上による小型化を目的としている.本論文では,エネルギー回生 効率の向上による小型化に主眼を置き,現段階での IAFO のエネルギー回生効率を, MATLAB/Simulink を用いた数値シミュレーションによって求め,エネルギー回生効率向上 を行うための,回路内パラメータの改善案検討を行った.現段階での回路内パラメータに よる数値シミュレーションの結果として,エネルギー回生効率は約 12.77[%]であった. IAFO のエネルギー回生効率の向上のため,IAFO のリンクと,モータのギアによる増速 比を小さくすることで無駄となるエネルギーを小さくし,エネルギー回生効率の向上を図 った.これによりエネルギー回生効率を 29.6[%]まで向上させ,また,リンクとギアによる 増速比を小さくすることで装具の小型化の可能性があることが示された.しかし,リンク とギアによる増速比を小さくすることは,IAFO の制動トルクに影響を与えることが考えら れる.そのため今後,制動トルクの変化が装着者の歩容にどのような変化を与えるかを検 討する必要がある.- 20 -
参考文献
(1) 江原義弘・窪田俊夫・土屋辰夫・野坂利也・山本澄子,下肢装具のバイオメカニク ス片麻痺歩行と装具の基礎力学-,日本義肢装具学会編,医歯薬出版株式会社,pp. 18. 22.60-64.66,1996 (2) 山本澄子・ほか,短下肢装具の可撓性と初期角度が片麻痺者の歩行に及ぼす影響, バイオメカニズム,12.生体の運動機能とその復元-,pp.253.263,1994 (3) 山本澄子,油圧ダンパを利用した片麻痺者のための短下肢装具の開発,総合リハ・ 31 巻 4 号,pp.323.328,2003 (4) 有限会社オルソ,http://www.ortho-net.co.jp/lineup.htm,2009 年アクセス (5) 赤澤康史・中川昭夫・野村毅・東藤正浩・田中正夫,可変粘性継手を有する短下肢 装具による歩行実験,日本機械学会[No.04.1]2004 年次大会講演論文集(6), pp.109-110,2004 (6) 高岩昌弘・則次俊郎・前田朝康・浦賀章仁,空気圧ゴム人工筋を用いた足首背屈動 作補助による歩行支援装置の開発,日本機械学会[No.04.5]Dynamics and Design Conference 2004 CD-ROM 論文集,750,2004 (7) 株式会社安川電機, http://www.yaskawa.co.jp/php/newsrelease/contents.php?id=313&year=2013, (参照日 2015/3/9) (8) 亀山裕生,“エネルギー回生を考慮した短下肢装具の開発における実験評価”,日本 機械学会 中国四国支部 第 50 期総会・講演会論文集 No.125-1 K−81,2010(9)
小澤圭介,岡田養二,“エネルギー回生・アクティブ制御ダンパの研究”,日本機械 学会論文集 C 編,Vol.70,No.700,pp.3413-3418,2004.- 21 -
謝辞
本研究を行うにあたり,ご指導賜りました井上喜雄教授と芝田京子准教授に厚くお礼を 申し上げます.また,研究を共にした村上翔太郎氏,四方大輝氏,お世話になりました知 能機械力学研究室の皆様にも感謝の意を表します.
- 22 -
付録
今回、インテリジェント短下肢装具におけるエネルギー回生効率の数値シミュレーショ ンを行うにあたり、MATLAB/Simulinkで作成した数値シミュレーションモデルを図A.1に 示す.また,Subsystemブロック「Motor」,「ON回路」,「OFF回路」,「Micon」の構成ブ ロックを,それぞれ図A.2,図A.3,図A.4,図A.5に示す. 図 A.1 エネルギー回生効率の数値シミュレーションモデル 図 A.2 「Motor」の構成ブロック i0 Write i0 i0 Memory i0 i0 i0 UM1 -K-To Workspace2 i To Workspace Vm Time Processing PWM t0 Ron Ron Roff Roff PWM ON回路 E1 Ron L i0 t0 Out OFF 回路 E1 E2 Roff L i0 t0 Out MotorPower i mv Motor OutVolt OutRm OutLm MiCon MOS-FET Link Link L L Diode_VDrop Vdd Diode ON/Off Diode In1 Out1 BridgeC |u| Battery_V Vb BatteryPower PWM i OutLm 3 OutRm 2 OutVolt 1 UM -K-To Workspace w Rm Rm Lm Lm Ke Ke GearR -K-From Workspace angle ConvVe-K-- 23 -K-- 図 A.3 「ON 回路」の構成ブロック 図 A.4 「OFF 回路」の構成ブロック 図 A.5 「Micon」の構成ブロック Out 1 Math Function eu Gain -1 Divide 3 Divide 2 Divide t0 5 i0 4 L 3 Ron 2 E 1 1 Out 1 Math eu Gain 1 -1 Divide 5 Divide4 Divide1 t0 6 i0 5 L 4 Roff 3 E 2 2 E 1 1 Vmc Vmc UM5 -K-UM2 ss To Workspace 1 Pcmc Pcmc Write 1 Pcmc Pcmc Memory 1 Pcmc Pcmc Pcmc Imc Imc