国際医療福祉大学大学院
医療福祉学研究科 博士課程
踵骨-下腿の運動連鎖の動態解析
平成
25 年度
保健医療学専攻・福祉援助工学分野・福祉援助工学領域
学籍番号:
11S3009 ( 氏名:江戸 優裕 )
研究指導教員:山本 澄子教授
踵骨-下腿の運動連鎖の動態解析
江戸 優裕
要
旨
本研究の目的は、踵骨-下腿の運動連鎖の動態を決定する解剖学的要因と、健常者や変形性膝 関節症(膝OA)者における動態の特徴を明らかにすることである。対象は健常若年者 25 名・高 齢者29 名・膝 OA 者 5 名とした。三次元動作解析システムにより立位での足部回内外運動時の踵 骨回内外と下腿回旋を計測した。また、X 線画像を用いて足部骨アライメントを計測した。 解析の結果、運動連鎖の動態に関与する要因は足部骨アライメントと足関節肢位であった。す なわち、足部アーチの挙上や足関節背屈によって、下腿に対して距骨下関節の運動軸が背屈する ほど、踵骨回内外よりも下腿回旋が優位な動態を呈した。健常下肢における運動連鎖の動態は大 きな個人差を認めたが、男性のほうが女性よりも下腿回旋が優位という性差や、高齢者のほうが 若年者よりも左右差が大きいという年齢による差が認められた。また、膝 OA 者は高齢者よりも 個人差が大きい傾向があった。そして、これらの対象者の属性による動態の特徴も足部骨アライ メントや足関節肢位に依存することが示唆された。キーワード
運動連鎖 ・ 踵骨 ・ 下腿 ・ 距骨下関節 ・ 変形性膝関節症Analysis of the Kinematic Chain
of the Calcaneus and the Shank
Masahiro EDO
Abstract
The present study aimed to analyze the kinematic chain of the calcaneus and the shank and its effect caused by the foot structure in healthy adults and patients with knee osteoarthritis (OA). The study included 25 healthy young adults, 29 healthy elder adults, and 5 patients with knee OA. We measured the rotational movement of the shank and the pronation/ supination movement of the calcaneus in a standing position using 3D motion analysis system. Additionally, the alignment of the foot bone of each subject was measured using X-ray image. The analysis showed that foot bone alignment and ankle joint position are two factors that determine the kinematic chain. We found large shank rotation in the high arch alignment of the foot as well as in the dorsiflexed ankle joint position. Among the subjects of three groups, male showed larger shank rotation compared to female, and the laterality of movement was larger in the elderly adults compared to that of the young. Patients with knee OA showed larger deviation among individuals when compared to healthy subjects. Then, our findings suggest that these characteristics of between the three groups also depend on foot bone alignment and ankle joint position.
Key words
目 次
第1章 序 論 ……… 1 1.1. 本研究の背景 ……… 2 1.2. 本研究の領域における過去の研究 ……… 4 1.3. 本研究の目的 ……… 8 1.4. 本研究における足部の運動学的用語の定義 ……… 9 1.5. 本研究における倫理的配慮 ……… 11 1.6. 本論文の構成 ……… 12 第2章 光学式三次元動作解析システムを用いた計測の妥当性と再現性……… 13 2.1. 本研究における踵骨-下腿の運動連鎖の動態計測の方法 ……… 14 2.2. 赤外線反射マーカーの貼付位置の妥当性 ……… 20 2.3. 足部回外運動と回内運動における運動連鎖の動態の再現性 ……… 25 2.4. 赤外線反射マーカーの貼付位置、および計測課題の再現性 ……… 27 2.5. 小括 ……… 28 第3章 踵骨-下腿の運動連鎖の動態を決定する解剖学的要因 ……… 29 3.1. 健常若年者における踵骨-下腿の運動連鎖の動態 ……… 30 3.2. 踵骨-下腿の運動連鎖の動態と足部骨アライメントの関係 ……… 33 3.3. 矢状面上での足関節の肢位による踵骨-下腿の運動連鎖の動態変化 ……… 50 3.4. 小括 ……… 54 第4章 対象者の属性による踵骨-下腿の運動連鎖の動態の特徴 ……… 55 4.1. 健常者における踵骨-下腿の運動連鎖の動態 ……… 56 4.2. 変形性膝関節症者における踵骨-下腿の運動連鎖の動態 ……… 60 4.3. 小括 ……… 64 第5章 総 括 ……… 65 5.1. 本研究の結果のまとめ ……… 66 5.2. 本研究の意義 ……… 67 5.3. 本研究の限界と今後の課題 ……… 68 5.4. 臨床への提言 ……… 69 5.5. 本研究の結論 ……… 71 謝 辞 ……… 72 引用文献 ……… 74 付 録 ……… 81 ⅰ. セグメント角度の計算プログラムの妥当性の検討 ……… 82 ⅱ. Kellgren-Lawrence 分類 ……… 87第1章
1.1. 本研究の背景
理学療法は破綻した運動機能の再構築を図る理論、および技術体系である。骨関節疾患の理 学療法において、以前は罹患部の可動域訓練と筋力訓練が主流であった。しかし、近年では局 所の機能低下が全身の運動に影響を与えることや、特異な運動自体が疾患の原因になり得ると いう考え1)が一般化してきたため、運動療法も罹患部のみの画一的なものから多関節の運動連鎖 を考慮したものへとパラダイムシフトしてきたといえる2)。すなわち、運動連鎖の観点を加えて 人間の動きを分析することが効果的な理学療法に繋がると考えられている。そのような背景か ら、2008年以降に出版された書籍2)3)4)のタイトルや、学術誌5)6)7)の特集にも運動連鎖という用 語を目にするようになった。 「運動連鎖(Kinetic chain)」とは、1800年代から機械工学の分野で剛体リンクモデルの動 きを示すために用いられてきた概念である8)(図1-1)。この概念を1955年にSteindler9)が身体運 動に応用し、「ある関節で運動が生じると、その運動の影響が隣接関節に波及すること」と定義 した。そして、この定義は今日に至るまでにかなり拡大解釈されており7)、現在では運動連鎖は 運動学(Kinematics)・運動力学(Kinetics)・エネルギー論(Energetics)の3つの側面を有す る用語となっている6)。バイオメカニクスの分野では運動力学あるいはエネルギー論で捉えられ ることが多く10)、リハビリテーションの分野では運動学的視点で捉えられることが多い4)11)。運 動学的視点で実際に運動連鎖と称される運動は、骨と骨の連動のみならず、靭帯と骨組織、筋 連結、筋膜など枚挙に暇がない5)。このように統一された定義がないままで汎用されている現状 は、本邦のみでなく欧米にも共通する問題である6)。こうした背景を鑑みて、本論文では曖昧さ 図1-1 「運動連鎖」の定義の変遷 (リハビリテーション分野) (バイオメカニクス分野) 1800 年代 機械工学分野で剛体リンクモデルの運動を示す8) 1955 年 Steindler が身体運動に応用9) 「ある関節で運動が生じると、その運動の影響が近隣関節に波及すること」 【本研究】 「ある分節が動くと関節の解剖学的構造に依存 して隣接する分節が自動的に連動すること」 運動学 (Kinematics) 運動力学 (Kinetics) エネルギー論 (Energetics) 拡大解釈を避けるために以下の定義で運動連鎖という用語を使用した。すなわち、本論文ではリハビリ テーション分野の運動学的な視点から、運動連鎖を「ある分節が動くと関節の解剖学的構造に 依存して隣接する分節が自動的に連動すること」と定義した。 この定義に該当する運動連鎖の具体例は、股関節において生じる寛骨前後傾と大腿骨内外旋 のペア 3)や、肋椎関節において生じる胸椎の屈伸と肋骨の前後方回旋のペア12)などである。こ れら以外にも身体各所には多数の運動連鎖が存在するが、その中でも荷重位における踵骨の回 内外と下腿の回旋は特に強固に連動する運動連鎖である。この連鎖では踵骨の回外と下腿の外 旋、踵骨の回内と下腿の内旋がペアとなる。すなわち、踵骨が回外すると下腿を外旋させ、踵 骨が回内すると下腿を内旋させる。そして、踵骨の運動に下腿が連動するのみでなく、下腿に 回旋が生じた場合にも踵骨を回内外させる(図1-2)。以下、この運動連鎖を「踵骨-下腿の運 動連鎖(Kinematic chain of the calcaneus and the shank)」と表現する。
踵骨-下腿の運動連鎖は、足部と近位体節との伝達のキーポイント13)とされ、特に下肢の関 節疾患領域においては臨床的に重要視されている。その機能は歩行時に下肢に生じる回旋スト レスを踵骨の回内外に変換して吸収すること14)や、逆に踵骨の回内外を下肢の回旋運動のトリ ガー15)にすることと報告されている。踵骨と下腿の間にこうした運動面の変換機能を有するこ とで、例えば歩行の安定化にとって重要とされる立脚初期の下腿内旋16)17)18)を、同じ時期の踵 骨回内によって生じさせることができる16)19)20)(詳細は第1 章第 2 節で述べる)。また、臨床 的にはインソールやテーピングで踵骨の回内外を誘導することで、連鎖的に下腿の回旋をコン トロールし、膝関節や骨盤帯の動きの変化を図ることなどがある13)21)。このように、踵骨-下 腿の運動連鎖は人間の動作遂行上重要な要因であり、臨床への応用範囲も大きいと考えられる。 図1-2 足部(踵骨)と下腿の運動連鎖(Mann22)より引用改変) a 足部回外と下腿外旋 b 足部回内と下腿内旋 下腿内旋 足部(踵骨)回内 下腿外旋 足部(踵骨)回外 a b
1.2. 本研究の領域における過去の研究
1.2.1. 踵骨-下腿の運動連鎖を成立させる関節運動
踵骨-下腿の運動連鎖は、単に踵骨と下腿の間で生じると記述されることが多いが、実際に は踵骨と下腿骨(脛骨・腓骨)は直接関節構造を有しているわけではない。両者は距骨を介し て配列されるため、運動連鎖の背景には距骨の動きが介在している。すなわち、踵骨-下腿の 運動連鎖は下腿骨と距骨からなる距腿関節と、距骨と踵骨からなる距骨下関節の 2 つの関節の 複合運動により構成されている。両関節とも運動自由度が1 であることにより、その間に挟ま れる距骨の運動は定型化し、ベアリングのように作用することで踵骨と下腿の正確な運動連鎖 を実現している。具体的には、踵骨回外と下腿外旋には距骨の外転・背屈が介在し、踵骨回内 と下腿内旋には距骨の内転・底屈が介在している23)。さらに詳しく言えば、後述する関節の運 動軸の向きにより、絶対空間において距骨の背屈は踵骨回外を、距骨の底屈は踵骨回内を引き 起こし24)、距骨の外転は下腿外旋を、距骨の内転は下腿内旋を引き起こす25)。そして、荷重な どにより足部の底背屈角度が変化しない場合、運動自由度1 の距腿関節と距骨下関節に挟まれ た距骨は、外転と背屈、および内転と底屈を同時に生じざるを得ない。そのため、踵骨回外と 下腿外旋、および踵骨回内と下腿内旋が連動することになる。このように、踵骨と下腿の間で 距骨の運動がベアリングのように介在することで、踵骨-下腿の運動連鎖は成立している。そ れはすなわち、距腿関節と距骨下関節の運動軸の向きが距骨の動きを規定し、さらには運動連 鎖の動態を決定することを意味している。 距腿関節は腓骨の外果関節面と脛骨の内果関節面、下関節面、およびそれに対応する距骨滑 車より構成される。運動軸は内果と外果の付近を通るため、軸の内側が前上方にわずかに傾い ている26)(図1-3)。しかし、内外果の位置関係はかなり大きな個人差があるとされており27)、 実際に距腿関節の運動軸を調べた研究では様々な報告がなされている。解剖学の教本26)では前 額水平軸に対して水平面上で10 度、前額面上で 8 度の角度を成すと示されているが、Mann28) は水平面上で成す角度には-9 度から 21 度までの個人差があり、前額面上で成す角度には 2 度 図1-3 距腿関節と距骨下関節の運動軸(坂井ら26)より引用改変) a 後方より観察(前額面) b 上方より観察(水平面) 距腿関節 距骨下関節 a b 距腿関節 距骨下関節から22 度までの個人差があるとした上で、水平面上で平均 6 度、前額面上で平均 10 度の角度 を成すと報告している。また、Isman29)は前額面上で約11 度の角度を成すと報告している。 一方、距骨下関節は解剖学的に非常に複雑な形態をしており、距骨と踵骨の間で基本的には 前・中・後の距踵関節から構成される。距骨下関節の運動軸は距骨頭と踵骨外側を通り、軸の 前方が上内方に向かって走行している26)(図1-3)。距骨下関節の運動軸についても、距腿関節 と同様に様々な報告がある。解剖学の教本 26)では矢状水平軸に対して矢状面上で 30 度、水平 面上で20 度と示されているが、Manter30)やSeibel31)は矢状面上で42 度、水平面上で 16 度の 角度を成すと述べている。また、藤井ら32)は矢状面上で41 度、水平面上で 23 度の角度を成す とし、Rose ら33)は矢状面上で45 度の角度を成すと示している。Michaud34)は矢状面上での角 度に20 度から 69 度もの個人差があると述べている。 このように距腿関節と距骨下関節の運動軸については、多数の研究者が様々な報告をしてお り、かつ対象者によってかなりの個人差があることが示されている。関節軸の相違はその軸回 りで生じる体節運動の相違に繋がるため、両関節の運動軸にばらつきが大きければ、それによ って構成される踵骨-下腿の運動連鎖の動態にも個人差や左右差が生まれると推察される。
1.2.2. 踵骨-下腿の運動連鎖の動態
前項で述べたように、距腿関節と距骨下関節の運動軸の相違によって、踵骨-下腿の運動連 鎖の動態にも個人差や左右差が生まれると推察される。しかしながら、多くの成書でも運動連 鎖の動態に関しては踵骨と下腿の連動方向を述べるに留まっており、どのような動態を呈して 連動するかということや、動態の個人差、左右差の存在については不明な部分が多い。 Nawoczenski ら35)は三次元動作解析システムを用いて、走行時に生じる運動連鎖について調べている。この報告では、足部構造がhigh arch と low arch の対象者を抽出し、その 2 群間で 運動連鎖の動態に差があることを示している(詳細は第3 章第 2 節で述べる)。この研究で得ら れた運動連鎖の動態はステップごとに大きく異なるものだったため、十分な信頼性が保証され ているとは言い難いが、運動連鎖の動態は個人差があり、さらにその個人差は足部構造と関連 することが示唆される。Pinto36)はNawoczenski ら35)の報告を基に、運動連鎖として生じる踵 骨回内外と下腿回旋の比率が個人によって異なることに着目し、それを臨床に生かすことの重 要性を訴えている。そして同時に、その個人差の存在が臨床現場において周知されていないこ とを問題として指摘している。こうした背景から、筆者らは先行研究37)38)において、立位での 足部回内外運動時の踵骨-下腿の運動連鎖の動態を三次元動作解析システムにより計測した。 解析の結果、運動連鎖として生じる踵骨回内外と下腿回旋の角度変化は、同一肢では足部回内 外の全可動範囲で一定の比率であり、さらにその比率は4 倍以上の個人差と、過半数の対象者 に左右差があることが分かった。円滑な身体運動を構成するために踵骨-下腿の運動連鎖の重 要性を述べている報告は多数あるが、このような運動連鎖の動態を詳細に調べた研究は少ない。 現状では、運動連鎖の動態が部分的に示されている程度であり、動態を決定する解剖学的要因 や、対象者の属性による動態の特徴は検討されていない。 筆者らの先行研究37)38)では踵骨の角度算出に用いた3 点のマーカーは、V 字型のジグによっ て踵後面に設置されていた(図1-4)。この方法は、マーカー間の距離を広げることによってカ メラが各マーカーの位置を正確に認識しやすくなるため、カメラの認識感度を代償することが
できる。しかし、踵の体表面からマーカーまでにシリコン製の土台とプラスティックの枝を介 するため、歩行のInitial Contact のように踵に衝撃が加わるとマーカーが大きく振動し、正確 な運動を反映できないというデメリットがあった。さらに、踵後面のみに全てのマーカーを接 続させるため、踵後面の皮膚と骨にズレが生じた場合に踵骨の運動を把握できなくなることも 否定できない問題であった。この点を解決するためには、踵体表面に直接3 点以上のマーカー を貼付してもマーカーを認識できる計測環境を設定することと、骨と皮膚のズレが小さい部位 にマーカーを貼付し、マーカーが踵骨の運動を正確に反映することを確認する必要がある。
1.2.3. 歩行時の踵骨-下腿の運動連鎖
第1 章第 1 節に述べたように、踵骨-下腿の運動連鎖は人間の動作遂行上重要な要因である。 人間の最も基本的な移動手段である歩行時にも、踵骨-下腿の運動連鎖は円滑な体節運動を生 成するために作用し続けている。 歩行周期の中でも左右の下肢の荷重の受け継ぎを行う立脚初期は、衝撃吸収、下肢の安定化、 前進の維持という3 つの課題が課されており、歩行の安定にとって制御が最も重要な時期であ る39)。この立脚初期の運動制御は、様々な筋活動に加えて踵骨-下腿の運動連鎖が重要な役割 図1-5 一歩行周期の踵骨と下腿の運動(山口ら 200913)より引用改変) 図1-4 先行研究37)38)で用いた踵骨のマーカー(江戸ら37)より引用)を担っている。Heel Contact に軽度回外位であった踵骨は Loading Response に回内運動を生 じるため、これに伴って下腿の内旋が誘発される16)19)20)(図1-5)。この下腿の内旋は、いくつ かの機能的な働きを有するとされている。すなわち、下腿の内旋に伴って下腿自体の外方傾斜 を防ぎ前額面上で膝関節を直線的に配列させること17)、下腿の内旋によって生じる膝関節の内 旋が前・後十字靱帯を交差させ、大腿骨と脛骨の関節面を強固に連結することで膝関節を動的 に安定させること18)、膝関節の内旋によって膝関節のロックを解除することで屈曲を誘発し衝 撃吸収に寄与すること16)である。これらのことから、立脚初期の下腿内旋の減少は膝関節の力 学的負荷を増大させる可能性がある。したがって、運動連鎖が特異な動態を呈する場合は、運 動連鎖の作用によって生じる立脚初期の下腿の内旋も変容し、下肢疾患のリスク因子になる可 能性がある。また、立脚中期以降は踵骨の回外運動に伴って下腿が外旋していくため、特異な 運動連鎖の動態は立脚期全体における下肢運動にも影響を及ぼすことになると考えられる。
1.2.4. 変形性膝関節症と踵骨-下腿の運動連鎖の関係
変形性膝関節症(以下、膝 OA)は、膝関節に加わる外力による小外傷の蓄積が軟骨基質障 害と軟骨細胞の代謝変化を引き起こし、関節破壊に至る疾患である40)。膝OA はその罹患部位 により内側型、外側型、膝蓋型に分類され40)、世界的にみても内側型の発症率が高い41)。また、 明らかな原因がなく発症する一次性と、外傷などに伴って生じる二次性に分けられ42)、一次性 の発症率が高い43)。このことから、本研究における膝OA は最も頻度の高い一次性の内側型43) を指すこととする。 膝OA と歩行に関する複数の先行研究を統合すると、膝 OA の発症・進行と運動連鎖の動態 が以下のように関係することが示唆される。膝OA の発症や進行に関わるリスクファクターは、 年齢、性別、肥満など様々な報告がされている44)が、力学的ストレスも深く関与することが分 かっている45)46)47)。石井48)は運動学・運動力学的な手法を用いて膝OA 者の歩行を三次元的に 解析し、その結果から主要な問題が生じるのは立脚初期から中期であり、膝 OA の運動療法は この時期の運動制御が重要と述べている。膝 OA 者の歩行では、立脚初期における急激な膝関 節内反(以下、lateral thrust)が生じること48)49)50)がよく知られている。lateral thrust は膝OA の進行リスクを高めるとされており51)52)、その機序は以下のように推論されている。lateral thrust は床反力作用線からの膝関節の距離を増加させるため、膝関節外反モーメントを増大さ せる48)。そして、膝関節外反モーメントの増大は膝関節内側コンパートメントへの圧縮応力の 増大の指標であるため53)54)55)、内側型膝OA を進行させる要因となる45)。膝OA 歩行において、 lateral thrust と同じ立脚初期に生じる特徴に、下腿の内旋の減少がある 56)。この立脚初期の 下腿内旋の減少は、前述のように膝関節の内反 17)や動的安定性の低下 18)、緩衝作用の減弱 16) を惹起する。そして、これらは全て膝OA 者における立脚初期の lateral thrust の誘発因子で あるといえる。すなわち、踵骨-下腿の運動連鎖の作用によって生じるとされる下腿の内旋 16)19)20)は、lateral thrust の抑制にとって重要な役割を果たすといえる。したがって、膝 OA の 発症や進行に踵骨-下腿の運動連鎖の動態が関与する可能性があると推論される。
1.3. 本研究の目的
本研究は踵骨-下腿の運動連鎖を考慮して行われている動作評価や運動療法、足底挿板療法 をさらに発展させるために行った。人間の動作に対する踵骨-下腿の運動連鎖の関与を明らか にする上で、まずはその動態を正確に把握する方法を確立する必要がある。そして、運動連鎖 の動態を決定する解剖学的な要因を明確にすることで、運動連鎖の動態のコントロールなどの 臨床応用に繋がる。また、膝 OA などの障害下肢の運動を運動連鎖の観点から評価・治療する 際は、健常下肢における基礎データとの比較も必要である。 こうした背景に基づく、本研究の目的は以下の4 項目である。 ①踵骨-下腿の運動連鎖の動態を定量的に把握する方法を示す。 ②踵骨-下腿の運動連鎖の動態を決定する解剖学的な要因を明らかにする。 ③健常下肢における踵骨-下腿の運動連鎖の動態の性差や左右差、年齢による影響などの 特徴を明らかにする。 ④膝OA 者における踵骨-下腿の運動連鎖の動態の特徴を明らかにする。 これらの目的に対する本研究の仮説を以下に述べる。まず、踵骨-下腿の運動連鎖の動態は 先行研究37)38)と同様に踵骨回内外と下腿回旋の角度変化の比率により定量化することができる と考える。そして、踵骨-下腿の運動連鎖は距腿関節と距骨下関節の複合運動により生じるた め、これらの運動軸の向きがその動態を決定しているといえる。したがって、これらの関節軸 の向きに関与する足部骨アライメントや足関節肢位が運動連鎖の動態と関連すると考える。ま た、健常下肢における踵骨-下腿の運動連鎖の動態は、大きな個人差を有し、さらには左右差 や性差、年齢による差を有すると考える。膝 OA 者は運動連鎖の作用により生じるとされる立 脚初期の下腿内旋が小さい56)ことから、運動連鎖の動態も下腿回旋が小さいという特徴を有す ると考える。1.4. 本研究における足部の運動学的用語の定義
足部の運動は多関節の複合運動から成り、その運動方向を示す用語は国際的にも統一されて いない。特に「外返し/内返し」と「回内/回外」をどのような動きを指して用いるかは、見 解が分かれていることが知られている57)58)27)。こうした足部の運動学的用語の定義に対する見 解の相違は、文献の翻訳や引用をする際に混乱を生じる原因になっている。よって、本論文で は解釈の統一を図るため、以下のように足部の運動学的用語を定義づけた。運動学的用語は日 本整形外科学会・日本リハビリテーション医学会が制定した関節可動域表示(以下、日整会関 節可動域表示)59)60)に準拠することを基本にし、3 つの運動基本面(図 1-6)上における運動と して表記した(表1-1・図 1-7)。 矢状面上の運動は底屈/背屈と定義した。日整会関節可動域表示59)60)では屈曲/伸展という 表記も用いられているが、Kapandji61)は屈曲と伸展を逆の運動方向として定義している。よっ て、屈曲/伸展は混乱を招く恐れがあるため使用しないこととした。 前額面上の運動は回内/回外と定義した。これは日整会関節可動域表示59)60)において足部長軸を中心とする回旋運動と定義されるものである。American Orthopaedic Foot and Ankle Society(以下、AOFAS)62)やInternational Society of Biomechanics(以下、ISB)63)では同
様の運動を外返し/内返しと定義しているため、英語圏ではこの定義で用いられることがほと んどである 64)。しかし、本邦では日整会関節可動域表示59)60)の定義に準ずることが多いため、 本論文では回内/回外とした。また、本邦では後足部に限り臨床的に内反/外反と呼ぶことも ある27)が、これらは足部の変形を意味する用語であることから関節運動の名称としては相応し くないともされる59)60)ため使用しないこととした。 図1-6 運動基本面(日本足の外科学会用語委員会65)より引用改変) 前額面 水平面 矢状面 矢状面 水平面 前額面
水平面上の運動は内転/外転と定義した。これも日整会関節可動域表示59)60)に準ずる定義で ある。AOFAS62)では前足部と後足部で異なる表現を用いており、前足部を内転/外転、後足部 を内旋/外旋とし、ISB63)では前足部・後足部ともに内旋/外旋と定義しているが、前額面と 同様に本論文では本邦の慣例にしたがった。 3 つの基本面における複合運動は、内返し(底屈・回外・内転)/外返し(背屈・回内・外 転)と定義した。これも日整会関節可動域表示 59)60)に準ずる定義である。AOFAS62)や ISB63) では同様の運動を回外/回内と定義しているが、前額面と同様に本論文では本邦の慣例にした がった。 表1-1 本研究における足部の運動の定義 運動基本面 運動 矢状面 Sagittal plane 底屈/背屈 Plantarflexion/Dorsiflexion 前額面 Frontal plane 回内/回外 Pronation/Supination 水平面 Horizontal plane 内転/外転 Adduction/Abduction 3 つの基本面の複合 Triplane 外返し/内返し Eversion/Invesion 図1-7 本研究における足部運動の定義(日本足の外科学会用語委員会65)より引用改変) a 矢状面の運動(底屈/背屈) b 前額面の運動(回内/回外) c 水平面の運動(内転/外転) d 3 つの基本面の複合運動(外返し/内返し) a b c d
1.5. 本研究における倫理的配慮
本研究に参加した全ての対象者には、研究の目的や方法を事前に口頭、および紙面で説明し た。そして、研究内容の理解と研究への協力に同意が得られた場合に同意書を締結した。なお、 本研究は国際医療福祉大学倫理委員会の承認(承認番号:11-156)を得て行った。また、若年 者と高齢者の動作解析に関しては文京学院大学倫理委員会の承認も得た(承認番号:2013-5)。
1.6. 本論文の構成
本論文は、5 つの章により構成した。 第1 章では、本研究の背景、踵骨-下腿の運動連鎖に関する過去の研究、本研究の目的を述 べた。また、本論文で用いる運動学的用語の定義、および倫理的配慮について記した。 第2 章では、踵骨-下腿の運動連鎖の動態を定量的に把握するための計測方法を述べた後に、 その計測方法の妥当性と再現性について検討した。 第3 章では、第 2 章で検討した計測方法を用いて踵骨-下腿の運動連鎖の動態を解析し、先 行研究37)38)での結果と比較した後に、運動連鎖の動態と足部骨アライメントの関係、および足 関節肢位による動態変化について検討した。これにより、運動連鎖の動態を決定する解剖学的 な要因について言及した。 第4 章では、若年者・高齢者・膝 OA 者の踵骨-下腿の運動連鎖の動態を解析し、健常下肢 における動態の特徴を把握した後に、膝OA 肢における動態の特徴について考察した。 第5 章では、本研究で得られた結果をまとめた上で、本研究の意義や限界と今後の課題、臨 床への提言を述べた。そして、最後に本研究の結論を述べた。第2章
光学式三次元動作解析システムを
用いた計測の妥当性と再現性
2.1. 本研究における踵骨-下腿の運動連鎖の動態計測の方法
2.1.1. はじめに
これまでに踵骨-下腿の運動連鎖の動態を調べた研究はほとんどないため、現状では動態解 析の方法が確立されていない。したがって、本研究においてはまず計測方法の妥当性と再現性 を確認する必要がある。この節では妥当性・再現性の検討に先立ち、本研究で用いた動態計測 の方法を述べる。2.1.2. 計測機器
計測は赤外線カメラMX-T(VICON 社製)8 台で構成される光学式三次元動作解析システム を使用した(図2-1)。対象者の下肢に直径 14mm の赤外線反射マーカーを貼付し、計測課題動 作中のマーカーの位置をサンプリング周波数200Hz で計測した。なお、本研究の計測環境下に おける計測システムのマーカー認識誤差は、全てのカメラで0.3mm 未満であった。2.1.3. 計測課題
計測課題は立位での両足部の能動的な回内外運動とした。開始肢位は立位とし、対象者に安 楽な姿勢で静止するよう指示した。検者の合図により、足部を両側同時に最大回外位まで回外 させた後に、最大回内位まで回内させ、再び最大回外位まで回外させる運動を5 回反復させた。 運動速度は十分に足部回内外が行える程度の至適な速度で、一定に保つよう指示した。 なお、計測動作遂行に伴って、足底面が部分的に床から離れることは許可したが、足位が変 化しないないよう指示した。また、膝関節は伸展位に保持させた。2.1.4. 赤外線反射マーカーの貼付位置
赤外線反射マーカーの貼付位置は、両側の腓骨頭・脛骨内側顆・内果・外果・踵後面・踵内 側面・踵外側面・第1 中足骨頭・第 5 中足骨頭の合計 18 点とした(図 2-2)。マーカーの貼付 は全ての対象者において同一検者が行った。 骨のランドマークが明確でない部位は、以下のように定義づけることでマーカー貼付位置の 再現性を確保した(図2-3)。脛骨内側顆マーカーは脛骨粗面と同じ高位で膝蓋骨を除く膝関節 の前後径の中央の直下の点、踵内側マーカーは踵後面マーカーと同じ高位で踵後面と内果直下 図2-1 計測空間 X 軸 Y 軸 Z 軸を結ぶ線の中点とし、踵外側マーカーは踵骨長軸を指標に踵内側マーカーを踵外側に投影した 点とした。 第1 章第 2 節に述べたように、筆者らの先行研究37)38)ではカメラが踵部の個々のマーカーを 認識できるよう、マーカー間の距離を広げるためにV 字型のジグを用いた。本研究では先行研 究37)38)よりもマーカーの認識感度が優れた計測環境を設定したため、踵体表面に直接3 点のマ ーカーを貼付しても誤認識することなく計測可能であった。また、これによりジグを使用した 場合に問題となるマーカーの振動などのアーチファクトも大幅に低減できるため、歩行などの 動作中の踵の動きも解析可能と推察された。 図2-2 マーカー貼付位置 a 前面より観察 b 後面より観察 a b 図2-3 ランドマークが明確でない部位のマーカー貼付位置の定義 a 脛骨内側顆マーカー b 踵内側マーカー c 踵外側マーカー a b c
2.1.5. データ処理
計測により得られた反射マーカーの三次元位置座標データは、VICON システムのデータ処 理ソフトウェアNexus1.7.1(VICON 社製)を用いて処理した。まず、欠損値に対してマーカ ー位置の補完を行い、その後フィルターをかけた。マーカー位置の補完は、Spline 補完と Copy 補完の補完後のマーカーの軌跡を画面上で視覚的に確認し、妥当なほうを選択した。すなわち、 体節運動と矛盾がない移動軌跡であり、かつ同じ体節に貼付した別のマーカーとの距離変化が ないほうを妥当と判断して選択した。フィルターは歩行などの動作に対して適切とされる遮断 周波数6Hz66)の2nd order Butterworth filter を適用した。その上で、プログラミング言語 BodyBuilder Language によって以下の手順で各体節に局所座標系を定義し、角度を計算した。 セグメント定義は踵骨・下腿・足部の3 つ体節に対して行った。踵骨セグメントの定義(図 2-4)は、まず踵後面マーカーを HEE、踵外側マーカーを HEEL、踵内側マーカーを HEEM とした。次にHEEL と HEEM の中点を原点とし、HEE と原点とを結ぶ線を Y 軸、原点と HEEL を結ぶ線とY 軸との外積を Z 軸、Y 軸と Z 軸に直角を成す線を X 軸とした。そして、Y 軸回り を回内外、Z 軸回りを内外転、X 軸回りを底背屈として捉えた。下腿セグメントの定義(図 2-5) は、まず腓骨頭マーカーを SHAL、脛骨内側顆マーカーを SHAM、内果マーカーを ANKM、 外果マーカーをANK とした。ANKM と ANK の中点を原点とし、SHAM と SHAL の中点と 原点とを結ぶ線をZ 軸、原点と SHAM を結ぶ線と Z 軸との外積を Y 軸、Z 軸と Y 軸に直角を 成す線をX 軸とした。そして、Z 軸回りを回旋、Y 軸回りを内外傾、X 軸回りを前後傾として 捉えた。足部セグメントの定義(図2-6)は、まず第 1 中足骨頭マーカーを TOEM、第 5 中足 骨頭マーカーをTOEL とした。次に TOEM と TOEL の中点を原点とし、HEE と原点とを結 ぶ線をY 軸、原点と TOEL を結ぶ線と Y 軸との外積を Z 軸、Z 軸と Y 軸に直角を成す線を X 軸とした。そして、Y 軸回りを回内外、Z 軸回りを内外転、X 軸回りを底背屈として捉えた。 これらの局所座標系より、オイラー角を用いて(詳細は付録ⅰで述べる)下腿に対する踵骨 の角度、足部に対する下腿の角度を算出した。下腿の角度を踵骨ではなく足部との相対角度で 算出したのは、下腿の回旋を踵骨に対して捉えるよりも、足部に対して捉えるほうが臨床的な 観察と整合性があると判断したためである。 図2-4 踵骨の局所座標系 HEEL HEEM HEE X 軸 Y 軸 Z 軸
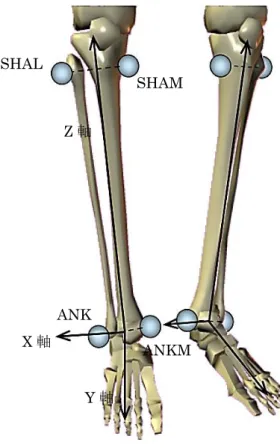
図2-5 下腿の局所座標系 SHAL SHAM ANK ANKM Z 軸 Y 軸 X 軸 図2-6 足部の局所座標系 TOEL TOEM HEE Z 軸 Y 軸 X 軸
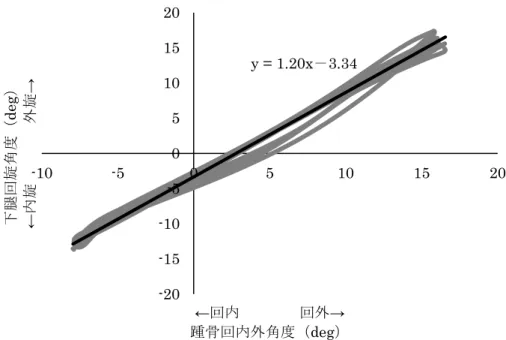
代表的な対象者1 例の計測結果を図 2-7 に示す。a は踵骨の角度の時間変化を表したもので あり、横軸が時間、縦軸が角度である。太線が回内外、細線が底背屈、点線が内外転を表して おり、縦軸の極性は(+)が回外・背屈・内転である。b は下腿の角度の時間変化を表したも のであり、横軸が時間、縦軸が角度である。太線が回旋、細線が前後傾、点線が内外傾を表し ており、縦軸の極性は(+)が外旋・内傾・後傾である。角度データの解析区間は、計測開始 後最初の踵骨回外角度の極値から、最後の踵骨回外角度の極値までの範囲(黒線で図示)とし た。すなわち、踵骨回外位からの回内運動と回外運動の5 往復分を解析区間とした。 筆者らの行った先行研究37)38)において、本研究と同様の計測課題中の踵骨回内外角度と下腿 回旋角度のPearson の積率相関係数は全例で r=0.97 以上であることが分かっている。よって、 両者の関係は一次回帰式で近似することが妥当といえる。したがって、本研究でも踵骨回内外 角度と下腿回旋角度の一次回帰係数を「連鎖比」として表現し、これを運動連鎖の動態と定義 した(図2-8)。連鎖比とは、踵骨回内外に対する下腿回旋の角度変化の比(下腿回旋角度/踵 骨回内外角度)である。連鎖比が大きければ、運動連鎖は下腿回旋が優位な動態を呈し、連鎖 比が小さければ踵骨回内外が優位な動態を呈することを意味している(図2-9)。 図2-7 計測課題中の踵骨と下腿の角度の時間変化と解析区間(代表例) a 踵骨角度 b 下腿角度 -10 -5 0 5 10 15 20 0 2 4 6 8 10 踵骨角度( de g ) ← 回内 回外 → ← 底屈 背屈 → ← 外転 内転 → time(sec) 回内外 底背屈 内外転 -20 -10 0 10 20 30 40 50 0 2 4 6 8 10 下腿角度( de g ) ← 内旋 外旋 → ← 前傾 後傾 → ← 外傾 内傾 → time(sec) 回旋 前後傾 内外傾 解析区間 a b
図2-8 踵骨-下腿の運動連鎖の動態(=「連鎖比」)の定義(代表例) y = 1.20x-3.34 -20 -15 -10 -5 0 5 10 15 20 -10 -5 0 5 10 15 20 下 腿 回 旋 角 度( de g ) ← 内旋 外旋 → ←回内 回外→ 踵骨回内外角度(deg) 図2-9 連鎖比の違いによる下肢の運動の相違(江戸ら37)より引用改変) a 足部中間位 b 連鎖比(大)の場合の足部回外位 c 連鎖比(小)の場合の足部回外位 a b c
2.2. 赤外線反射マーカーの貼付位置の妥当性
2.2.1. はじめに
体表標点による三次元動作解析では、運動中に皮膚と骨の相対的な位置関係が変化すること によって、マーカーが骨運動を正確に反映できなくなるという「Skin movement artifact」を 考慮する必要がある67)。本研究において、この問題がどの程度生じるかを調べるために、この
節では踵骨と下腿の体表に貼付したマーカーと骨の位置関係について検討した。
2.2.2. 対象
対象は健常成人1 名(筆者)とし、右下肢を検討対象とした。対象者の年齢は 28 歳、性別は 男性、身長は183.5cm、体重は 67.0kg、Body Mass Index(以下、BMI)は 19.9 であり、研 究結果に影響すると思われる既往歴はなかった。
2.2.3. 方法
2.2.3.1. CT 画像の撮像
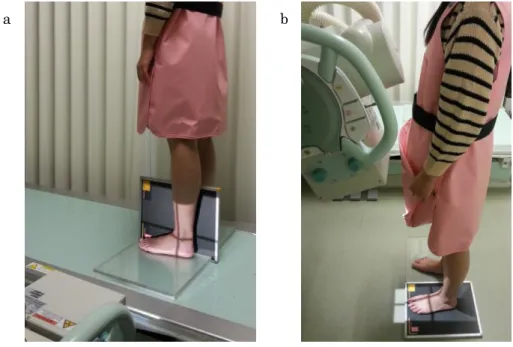
第2 章第 1 節と同様の踵骨と下腿の位置に同様のマーカーを貼付した状態で、右下肢のコ ンピュータ断層撮影(以下、CT:Computed Tomography)画像を撮像した(図 2-10)。CT 画像の撮像は、マルチスライス CT システム Aquilion64(東芝メディカルシステムズ社製) を用い、診療放射線技師が行った。実際の運動連鎖の動作解析は、立位での足部回内外運動 を計測課題としているが、今回のCT の撮影条件では立位をとることができない。このため、 足底にアクリル板を押し当てることにより立位時の足部への荷重を疑似した環境とし、足部 中間位・回外位・回内位の3 肢位で撮像した。2.2.3.2. 踵骨の骨角度およびマーカー角度の計測
踵骨に貼付したマーカー位置の妥当性の検証は、運動連鎖の動態計測において特に重要と いえる回内外について行った。 CT 画像データは画像処理ソフトウェア zioTerm2009Ver.2.0.0.4(Ziosoft 社製)を用いて、 3D に変換し、プリセットされている四肢骨モードにすることで骨を描出した。そして、画像 の観察角度を任意に調節し、足部中間位・回外位・回内位の各々において踵骨を後方から観 察した画像を得た(図 2-11)。これらの画像を用いて、以下の方法により踵骨自体の回内外 図2-11 踵骨回内外方向での骨角度およびマーカー角度の計測方法 a 骨角度(Seibel 68)の方法を応用) b マーカー角度 a b角度と踵骨に貼付したマーカーが表す回内外角度を計測した。 踵骨自体の回内外角度は、本来体表から計測する手法であるSeibel 68)の方法を応用し、踵 骨上部の内外側縁の中点と踵骨下部の内外側縁の中点を結ぶ線の鉛直に対する角度として計 測した。マーカーが表す回内外角度は、踵内側マーカーと踵外側マーカーの垂直二分線の鉛 直に対する角度として計測した。 なお、計測には画像解析ソフトウェアImageJ1.45l(米国国立衛生研究所製)を用いた。
2.2.3.3. 下腿の骨角度およびマーカー角度の計測
下腿に貼付したマーカー位置の妥当性の検証は、運動連鎖の動態計測において特に重要と なる回旋について行った。 CT 画像データは画像処理ソフトウェア zioTerm2009Ver.2.0.0.4(Ziosoft 社製)を用いて、 下腿長軸に対する水平断2D 画像に変換し、Window Level 80、Window Width 300 とする ことで骨を描出した。そして、足部中間位・回外位・回内位の各々において後述する任意の 高位の画像を得た。これらの画像を用いて、以下の方法により下腿骨自体の回旋角度と下腿 に貼付したマーカーが表す回旋角度を計測した。 下腿骨自体の回旋角度は、石川69)が報告した昭和大学法に基づき下腿近位断面と下腿遠位 断面の画像を用いて計測した(図 2-12)。本来、昭和大学法は下腿の近位と遠位の回旋角度 の差から下腿の捻転角度を計測するものであるが、本研究では下腿骨自体の回旋角度を捉え るために用いた。下腿近位の回旋角度は、膝蓋腱内側縁と脛骨内側後縁を結ぶ線上における 脛骨前縁と後縁の中点と、膝蓋腱外側縁と脛骨外側後縁を結ぶ線上における脛骨前縁と後縁 の中点とを結ぶ線の水平に対する角度である。下腿遠位の回旋角度は、脛骨前縁と後縁の中 点と、腓骨前縁と後縁の中点とを結ぶ線の水平に対する角度である。 マーカーが表す下腿回旋角度は、下腿近位は腓骨頭・脛骨内側顆高位の画像を用い、下腿 遠位は内果・外果の高位の画像を用いて計測した(図 2-13)。下腿近位の回旋角度は、腓骨 頭マーカーと脛骨内側顆マーカーの位置を同一面に投影した上で、両マーカーを結ぶ線の水 平に対する角度とした。下腿遠位の回旋角度は、内果マーカーと外果マーカーの位置を同一 面に投影した上で、両マーカーを結ぶ線の水平に対する角度とした。 なお、計測には画像解析ソフトウェアImageJ1.45l(米国国立衛生研究所製)を用いた。 図2-10 CT 撮影の概要 a 撮像肢位 b 下腿と足部 a b2.2.3.4. データ分析
計測により得られた全ての角度において、足部中間位から回外位までの回外変化量と、足 部中間位から回内位までの回内変化量を算出した。そして、骨角度の変化量とマーカー角度 の変化量を比較し、その差を足部回外および回内運動によって生じる Skin movement artifact の量として把握した。 図2-12 下腿回旋方向での骨角度の計測方法(昭和大学法69)) a 下腿近位角度 b 下腿遠位角度 a b 図2-13 下腿回旋方向でのマーカー角度の計測方法 a 腓骨頭レベル b 脛骨内側顆レベル c 下腿近位角度(a と b のマーカー位置を投影) d 内果レベル e 外果レベル f 下腿遠位角度(d と e のマーカー位置を投影) a b c d e f2.2.4. 結果
2.2.4.1. 踵骨の骨角度およびマーカー角度
表 2-1 は踵骨自体の回内外角度と、踵骨に貼付したマーカーが表す回内外角度を計測した 結果である。これを基に表 2-2 に足部中間位から回外位、および回内位までの角度変化量を 算出し、さらに骨角度とマーカーの角度の差を求めた結果を示す。この骨角度とマーカー角 度の変化量の差が、足部回内外によって生じた踵骨の回内外方向での Skin movement artifact である。回外時の骨角度の変化量は 16.60 度であり、その際の骨角度とマーカー角度 の差は-0.84 度であった。回内時の骨角度の変化量は-1.89 度であり、その際の骨角度とマ ーカー角度の差は0.40 度であった。2.2.4.2. 下腿の骨角度およびマーカー角度
表 2-3 は下腿自体の回旋角度と、下腿に貼付したマーカーが表す回旋角度を計測した結果 である。これを基に表2-4 に足部中間位から回外位、および回内位までの角度変化量を算出 し、さらに骨角度とマーカーの角度の差を求めた結果を示す。この骨角度とマーカー角度の 変化量の差が、足部回内外によって生じた下腿の回旋方向でのSkin movement artifact であ る。回外時の骨角度の変化量は近位で21.53 度、遠位で 21.67 度であり、その際の骨角度と マーカー角度の差は近位で2.71 度、遠位で 6.27 度であった。回内時の骨角度の変化量は近 位で-5.92 度、遠位で-4.67 度であり、その際の骨角度とマーカー角度の差は近位で 0.54 度、遠位で-5.28 度であった。 表2-1 踵骨回内外の骨角度およびマーカー角度 中間位 回外位 回内位 骨角度 -4.90 11.70 -6.79 マーカー角度 2.67 20.11 0.38 回外(+)・単位(°) 表2-2 踵骨回内外の骨角度およびマーカー角度の足部回内外による変化量 回外変化量 回内変化量 骨角度 16.60 -1.89 マーカー角度 17.44 -2.29 差 -0.84 0.40 回外(+)・単位(°) 表2-3 下腿内外旋の骨角度およびマーカー角度 中間位 回外位 回内位 近位 骨角度 -3.04 18.49 -8.96 マーカー角度 4.19 23.01 -2.27 遠位 骨角度 12.95 34.62 8.28 マーカー角度 9.46 24.86 10.07 外旋(+)・単位(°)2.2.5. 考察
2.2.5.1. 踵骨の骨角度およびマーカー角度について
本対象者においては、足部回外運動により踵骨は約17 度回外し、足部回内運動により踵骨 は約2 度回内した。この条件において、マーカー角度は足部回外時に踵骨回外を 0.84 度過小 評価し、足部回内時にも踵骨回内を0.40 度過小評価していた。これらのことから、踵骨のマ ーカーは計測動作時に1 度未満の誤差範囲で踵骨回内外を過小評価することが分かった。2.2.5.2. 下腿の骨角度およびマーカー角度について
本対象者においては、足部回外運動により下腿は約22 度外旋し、足部回内運動により下腿 は約5 度内旋した。この条件において、下腿近位のマーカー角度は足部回外時に下腿外旋を 2.71 度、足部回内時に下腿内旋を 0.54 度外旋方向に評価し、下腿遠位のマーカー角度は足部 回外時に下腿外旋を6.27 度、足部回内時に下腿内旋を 5.28 度過大評価していた。このこと から、下腿近位のマーカーは計測動作時に3 度未満の誤差範囲で下腿を外旋評価し、下腿遠 位のマーカーは6 度程度の誤差範囲で下腿回旋を過大評価することが分かった。したがって、 下腿のセグメントを定義するためのBody Builder Language による計算プログラムは、下腿 近位マーカーの重みづけを大きくすることで、角度誤差を3 度程度に抑えることができるこ とが確認された。よって、第2 章第 1 節に述べたように脛骨内側顆マーカー(SHAM)の重 みづけを大きく設定した。2.2.5.3. 三次元動作解析と CT 画像による角度算出方法の違いについて
本研究で用いた三次元動作解析手法では踵や下腿に貼付したマーカーの三次元位置座標か ら体節に局所座標系を定義し、オイラー角を用いて角度を算出する。それに対して、この節 で用いた CT 画像による角度計測は二次元画像上のものである。よって、両者を単純に比較 することはできないが、本節から本対象者における計測動作中のSkin movement artifact は 踵骨回内外で1 度、下腿回旋で 3 度程度であると推察され、本研究におけるマーカーの貼付 位置はおおむね妥当なものと判断した。 表2-4 下腿内外旋の骨角度およびマーカー角度の足部回内外による変化量 回外変化量 回内変化量 近位 骨角度 21.53 -5.92 マーカー角度 18.82 -6.46 差 2.71 0.54 遠位 骨角度 21.67 -4.67 マーカー角度 15.40 0.61 差 6.27 -5.28 外旋(+)・単位(°)2.3. 足部回内運動と回外運動における運動連鎖の動態の再現性
2.3.1. はじめに
本研究では、第2 章第 1 節に述べたように計測課題を足部の回内外を反復する動作とし、こ の動作中の踵骨回内外角度と下腿回旋角度から連鎖比を算出した。この節では、回内運動中と 回外運動中の運動連鎖の動態に差がないことを確認し、連鎖比の算出に回内運動と回外運動を 区別する必要性の有無について検討した。2.3.2. 対象
対象は下肢に既往のない健常成人10 名(20 肢)とした。対象者の内訳は男性 6 名・女性 4 名で、年齢は 25.2±2.9 歳、身長は 165.4±10.0cm、体重は 58.7±9.9kg、BMI は 21.4±2.4 であった。2.3.3. 方法
2.3.3.1. 足部回内運動と回外運動における踵骨-下腿の運動連鎖の動態計測
運動連鎖の動態の計測課題は第2 章第 1 節と同様とした。 ただし、得られた踵骨と下腿の角度データから、踵骨の回外極値から回内極値まで(以下、 回内運動中)のデータと、踵骨の回内極値から回外極値まで(以下、回外運動中)のデータ を分けて抽出した。計測動作は静止立位から足部の最大回外と最大回内を5 回反復する運動 であったため、回内運動中のデータと回外運動中のデータを各5 回施行分得た。そして、回 外運動中と回内運動中の連鎖比を算出した。2.3.3.2. 統計学的分析
Shapiro-Wilk 検定によりデータの正規性を確認した。その上で回内運動中の連鎖比と回外 運動中の連鎖比の再現性を、級内相関係数ICC(1,1)により検討した。 なお、解析は左右を独立したデータとして扱い、全ての検定における有意水準は危険率5% (p<0.05)で判定した。統計学的分析には統計解析ソフトウェア IBM SPSS Statistics 21 (IBM 社製)を使用した。2.3.4. 結果
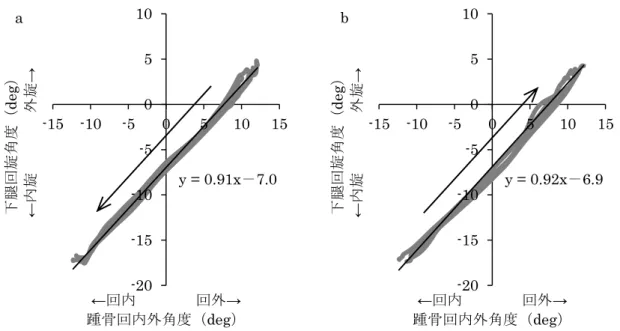
代表的な対象者1 例の足部回内運動中と回外運動中の運動連鎖の動態を図 2-14 に示す。横軸 が踵骨回内外角度、縦軸が下腿回旋角度を表している。グラフの極性は、横軸は(+)が踵骨 回外、縦軸は(+)が下腿外旋である。 Shapiro-Wilk 検定によって、各データが正規分布にしたがうことが確認された。回内運動中 の連鎖比は0.92±0.15、回外運動中の連鎖比は 0.94±0.16 で、ICC(1,1)=0.95 であった。2.3.5. 考察
足部回内運動中の連鎖比と回外運動中の連鎖比の級内相関係数より、非常に高い再現性 (almost perfect)70)が確保されていることを確認した。このことから、回内運動中と回外運動 中の連鎖比はほぼ同等といえるため、本研究においては回内運動中と回外運動中の動態を合わ せて連鎖比を算出することに問題はないと判断した。 また、足部の回内と回外という運動方向によって連鎖比にほとんど相違がないということか らは、踵骨-下腿の運動連鎖が運動方向の影響を受けない、強固な連動であることが分かった。図2-14 足部回内運動中と回外運動中の運動連鎖の動態(代表例) a 回内運動中 b 回外運動中 y = 0.91x-7.0 -20 -15 -10 -5 0 5 10 -15 -10 -5 0 5 10 15 下 腿 回 旋 角 度( de g ) ← 内旋 外旋 → ←回内 回外→ 踵骨回内外角度(deg) y = 0.92x-6.9 -20 -15 -10 -5 0 5 10 -15 -10 -5 0 5 10 15 下 腿 回 旋 角 度( de g ) ← 内旋 外旋 → ←回内 回外→ 踵骨回内外角度(deg) a b
2.4. 赤外線反射マーカーの貼付位置、および計測課題の再現性
2.4.1. はじめに
この節では、本研究で用いたマーカー貼付位置や計測課題に再現性があり、運動連鎖の動態 を安定的に把握できることを確認した。2.4.2. 対象
対象は下肢に既往のない健常成人5 名(10 肢)とした。対象者の内訳は男性 4 名・女性 1 名 で、年齢は23.8±1.3 歳、身長は 164.2±3.4cm、体重は 59.8±5.3kg、BMI は 22.2±2.0 であ った。2.4.3. 方法
2.4.3.1. 踵骨-下腿の運動連鎖の動態計測
運動連鎖の動態の計測方法は第2 章第 1 節と同様とし、連鎖比を求めた。 ただし、1 回目の計測の後、数日後に再び同じ方法で 2 回目の計測を行った。2.4.3.2. 統計学的分析
Shapiro-Wilk 検定によりデータの正規性を確認した。その上で 1 回目の計測時の連鎖比と 2 回目の計測時の連鎖比の再現性を、級内相関係数 ICC(1,1)により検討した。 なお、解析は左右を独立したデータとして扱い、全ての検定における有意水準は危険率5% (p<0.05)で判定した。統計学的分析には統計解析ソフトウェア IBM SPSS Statistics 21 (IBM 社製)を使用した。2.4.4. 結果
Shapiro-Wilk 検定によって、各データが正規分布にしたがうことが確認された。1 回目の計 測時の連鎖比は0.95±0.11、2 回目の計測時の連鎖比は 0.95±0.06 で、ICC(1,1)=0.72 であ った。2.4.5. 考察
1 回目の計測時の連鎖比と 2 回目の計測時の連鎖比の級内相関係数より、高い信頼性 (substantial)70)が確保されていることを確認した。級内相関係数の判定基準70)71)72)はいくつ か存在するが、全体をまとめるとICC が 0.7 以上であれば再現性が高いとされている73)。この ことから、本研究における運動連鎖の動態計測の再現性は良好と判断した。 なお、第2 章第 1 節に記したように、本研究の計測システムのマーカー認識誤差は全てのカ メラで0.3mm 未満であったため、今回の計測動作時のマーカー位置を捉えるには十分な精度と いえる。よって、1 回目と 2 回目の計測での連鎖比の相違は、主として検者によるマーカーの 貼付位置、および対象者による計測動作時の動きの差によって生じたものと考えられる。2.5. 小括
第 2 章では、本研究で用いた踵骨-下腿の運動連鎖の動態計測の方法、およびその計測方法 の妥当性と再現性について述べた。 本研究での踵骨-下腿の運動連鎖の動態計測は、体表標点による光学式三次元動作解析手法 を用いており、計測課題は立位での能動的な足部の回内外を反復する運動とした。この計測課 題における踵骨の回内外と下腿の回旋は一定の比率で角度変化することから、運動連鎖の動態 の指標として連鎖比(下腿回旋角度/踵骨回内外角度)を算出した。 計測に用いたマーカーの貼付位置の妥当性は CT 画像を用いて検討し、骨とマーカーの角度 の誤差範囲は約 3 度であった。足部の運動方向による動態の相違は、足部回内運動中と回外運 動中の連鎖比を比較し、その差は無視できると判断した。マーカー貼付位置と計測課題の再現 性は、日を替えた2 度の計測による連鎖比を比較し、おおむね良好であった。 以上のことから第2 章の小括として、本研究で用いた計測方法は運動連鎖の動態を解析する 上で実用可能であると結論づける。第3章
踵骨-下腿の運動連鎖の動態を
決定する解剖学的要因
3.1. 健常若年者における踵骨-下腿の運動連鎖の動態
3.1.1. はじめに
第 2 章では本研究で用いた踵骨-下腿の運動連鎖の動態の計測方法の妥当性と再現性につい て確認した。この節では、第2 章第 1 節の方法を用いて健常若年者における踵骨-下腿の運動 連鎖の動態を解析した。また、我々の先行研究37)38)での結果との比較も行った。3.1.2. 対象
対象は下肢に既往のない健常若年者25 名(50 肢)とした。対象者の内訳は男性 17 名・女性 8 名で、年齢は 26.4±3.7 歳、身長は 167.4±8.3cm、体重は 59.0±9.2kg、BMI は 21.0±2.4 であった。3.1.3. 方法
3.1.3.1. 踵骨-下腿の運動連鎖の動態計測
運動連鎖の動態の計測方法は第2 章第 1 節と同様とし、連鎖比を求めた。3.1.3.2. データ分析
得られた連鎖比から平均や個人差を求めた。3.1.4. 結果
図 3-1 に全ての対象者の連鎖比を示す。グラフの横軸が対象者および左右、縦軸が連鎖比を 表している。連鎖比の平均は1.0±0.2 であった。個人差は最大で約 1.6(対象者 A の右)から 最小で約0.6(対象者 Y の右)まで約 3 倍程度、左右差は最大で約 0.2(対象者 K)であった。3.1.5. 考察
3.1.5.1. 踵骨-下腿の運動連鎖の動態の各肢での相違
連鎖比の平均である1.0 は、例えば 10 度の踵骨回外に 10 度の下腿外旋が伴うことを意味 する値である。同様に最大であった連鎖比 1.6 は 16 度の下腿外旋が、最小であった連鎖比 0.6 は 6 度の下腿外旋が伴うことを意味している。すなわち、踵骨の回内外角度は同じでも、 それに連動する下腿回旋角度は3 倍程度の個人差が認められた。 図3-1 健常若年者における連鎖比 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 A B C D E F G H I J K L M N O P Q R S T U V W X Y 連 鎖比 対象者 右 左踵骨-下腿の運動連鎖は距腿関節と距骨下関節により構成されるため、その動態の指標で ある連鎖比の相違は、これらの関節軸の方向の違いを意味している。両関節の運動軸に大き な個人差があることは第1 章第 2 節に述べたため、以下に運動軸の方向と連鎖比の関係につ いて推論する。まず、現実には起こり得ないと思われるが、連鎖比が消失するの条件を述べ る。以下の2 条件のどちらかを満たす場合に連鎖比は消失する。一つ目の条件は、解剖学的 肢位において距腿関節と距骨下関節のどちらかの運動軸が矢状水平軸と重なる場合である。 第1 章第 4 節に述べたように、足部回内外運動は矢状水平軸回りで生じる前額面運動として 定義される59)60)。したがって、距腿関節と距骨下関節のどちらかの運動軸が矢状水平軸と一 致する場合に、足部回内外運動はその関節の単独運動で構成することができるため、連動す る下腿の回旋は消失する。二つ目の条件は、距腿関節軸と距骨下関節軸の三次元的な位置関 係が平行になる場合である。双方の運動軸がいかなる位置にあっても、平行であれば踵骨回 内外と下腿回旋という運動面が変換される運動は起こり得ないため、連鎖比は消失する。逆 に、大きな連鎖比を有するためには、両関節の運動軸が矢状水平軸に対して大きな角度を成 すこと(図3-2)と、双方の運動軸同士が相対的に大きな角度を成す必要がある。すなわち、 距腿関節と距骨下関節の運動軸が矢状水平軸に対して成す角度と、両関節軸の相対角度とい う2 条件が相互に関与して、連鎖比が決定されるものと考えられる。 実際の足部では距腿関節の運動軸は前額水平軸に近いため、この軸回りの運動はほとんど が矢状面の要素である。それに対して距骨下関節の運動軸は、図1-6 に示した 3 つの運動基 本面の全てに大きな角度を成すため、底屈・内転・回外(すなわち内返し)、および背屈・外 転・回内(すなわち外返し)の運動が同時に生じる。計測課題とした立位での足部回内外運 動時に足部は前額面運動が主体になるため、絶対空間上では踵骨の底背屈や内外転は制約さ れ、大きく生じることはない。よって、足部回外によって生じる距骨下関節の内返しは、距 骨を背屈・外転させることになる。これに対して、距腿関節が背屈することで下腿は垂直位 に保たれるが、距骨の外転要素は距腿関節では補完されないため下腿が外旋することになる。 すなわち、距腿関節は距骨下関節の運動によって生じる距骨の底背屈要素を吸収する役割を 有する一方で、運動面を変換する役割は小さいといえる。これを裏づけるように先行研究37)38) では、距腿関節の運動軸とほぼ一致する内外果を結ぶ線26)74)を指標とする果部外捻角度と連 図3-2 矢状水平軸に対する距骨下関節の運動軸の角度(江戸ら37)より引用改変) a 矢状面 b 水平面 a b
鎖比の Pearson の積率相関係数は r=0.07 と低値であった。このことから、運動面変換の比 率を意味する連鎖比に深く関与するのは、距骨下関節の運動軸の向きであると推察される。 この点については第3 章第 2 節で考察する。 第1 章第 1 節でも述べたように、運動連鎖は円滑な動作を構成する重要な要因である。踵 骨-下腿の運動連鎖が持つ機能の重要性について、これまでにも多くの臨床家や研究者が訴 えてきたが、個人差や左右差の存在を考慮した議論はほとんど成されていなかった。運動連 鎖の動態の相違は動作時の下肢の運動にも影響すると推察されるため、臨床上着目すべき要 因であると考える。図3-3 に連鎖比の違いによる運動連鎖の機能の相違を示した。運動連鎖 の機能は、下肢に生じる回旋ストレスを足部の回内外に変換して吸収すること14)や、逆に足 部の回内外によって下肢の回旋運動を誘発するトリガーになること15)といった下腿回旋を重 要視したものが挙げられる。これらの機能を果たすには、連鎖比が大きい下肢のほうが優れ ているといえるかもしれない。しかし、連鎖比が小さければ足部の回内外に伴う下腿回旋が 小さいことや、わずかな下肢の回旋によって大きな足部の回内外が生じるため、これらがメ リットとして作用する場合があるとも推察できる。このように、運動連鎖の動態の違いによ ってその機能にも差があると考える。