原 著
XCTD 観測に基づく地衡流計算との
比較による ADCP 流速の検証
千葉 元 *1 道田 豊 *2 松浦 知徳 *3, # 金山 恵美 *4 *1 大島商船高等専門学校商船学科,〒742‒2139 山口県大島郡周防大島町小松1091‒1 *2 東京大学大気海洋研究所,〒277‒8564 千葉県柏市柏の葉5‒1‒5 *3 富山大学都市デザイン学部,〒980‒8555 富山県富山市五福3190 *4 富山高等専門学校練習船「若潮丸」,〒933‒0293 富山県射水市海老江練合1‒2 # 現所属:東京大学大気海洋研究所 2019 年5 月28 日受付,2020 年8 月25 日採録 AbstractA method of correction for misalignment errors in ship-mounted Acoustic Doppler Current Profiler (ADCP) measurement is proposed by comparing ADCP current data with geostrophic currents based on eXpendable Conductivity, Temperature and Depth (XCTD) profiler obser-vations. Oceanographic observations using ADCP and XCTD were carried out in Toyama Bay and adjacent area on board the training vessel
Wakashio-maru of the National Institute of Technology, Toyama College in September 2016 and October 2017. Cross-track components of
ADCP currents are averaged between two neighboring XCTD stations to compare them with the geostrophic currents calculated from respec-tive XCTD data. For the first cruise in 2016, an offset velocity is commonly observed between the ADCP and geostrophic currents, while those show a coincident current profile in terms of vertical shear. The offset seems to be caused by a misalignment in ADCP observation and the misalignment angle estimated from the offset value is 1.7 degree, which is comparable with 1.5 degree estimated by the software ADCP Tracker. For the second cruise in 2017, there is no offset in the same comparison and the vertical profiles of geostrophic currents well trace those of ADCP currents. The present study proposes a practical method of misalignment correction by using geostrophic calculation based on a small number of XCTD measurements, which is different from that proposed by Michida & Ishii (2000). The present one has an advan-tage that it will be applicable to non-research vessels such as training vessels, which will not always be able to share enough ship-time for scientific observations for operational and/or logistic reasons. It is also suggested that the proposed methodology allows the training vessel
Wakashio-maru to be more effectively utilized to obtain higher quality observation data toward better understanding of the oceanographic
conditions in Toyama Bay and adjacent areas.
Keywords: ADCP, Misalignment error, XCTD, Geostrophic calculation, Water structure, Ocean current
1. 研究の背景と目的
船 舶 搭 載 型 ADCP(Acoustic Doppler Current Profiler: 超音波式多層流向流速計)は,船が航走を行いながら, 航路に沿った海水の流動を把握することができ,多くの 観測船や練習船に搭載されている(Michida & Ishii, 2000; 田中ら,2010; 道田,2014).しかし,ADCP で観測され る船に対する流向流速のベクトルから,海潮流の絶対流 向流速のベクトルを求めるためには,船速ベクトルを キャンセルする必要がある.このため,ADCP システム では,オンラインで,航海計器等から対地針路,対地速 力,絶対位置(緯度・経度)の情報を取り入れる必要が ある.浅海域において,ADCP が発振超音波の海底から の反射を捉えられていれば,ADCP 単独で対地船速を求 めることができるが,これが不可能な場合は,GPS 等測 位装置による船位変化から船速を求める必要がある.前 者 を, Bottom tracking reference mode( 以 下,BT モ ー ドとする.),後者を GPS reference mode(以下,GPS モードとする.)と呼び,一般的には前者の方が後者よ り高精度での観測が行える(Michida & Ishii, 2000; 石井, 2006; 田中ら,2010; 道田,2014).GPS モードでは,特 に針路や速力の急変化時に誤差が大きくなる傾向がある が,長時間の一定針路航行のデータを適切に処理するこ とにより,広域な海潮流分布の特性把握等が行える(千 葉ら,2007, 2015a, 2015b; 小関ら,2016). ここで船の絶対針路は重要な情報であり,一般的に は船のジャイロコンパスから信号を得ることが多いが, ジャイロコンパスにはジャイロエラーが存在し,この補 正を行う必要がある.特に,ADCP のセンサー設置にお ける船首尾線と,船のジャイロコンパスで設定されてい る船首尾線とのずれは流速測定において大きな誤差要 因となる.これをミスアライメント Misalignment と言 い,この値を正確に把握しておく必要がある(Michida & Ishii, 2000; 石井,2006; 田中ら,2010; 道田,2014). このミスアライメント角度は,船の建造時の ADCP セ ンサー取り付けにおいて限りなく小さくしたとしても, ジャイロコンパスにおける船首方向とのずれは生じうる ため,常に監視を行う必要がある.
Michida & Ishii(2000)は,1980 年代から海上保安庁で 広く使われていた3 ビーム型船舶搭載型 ADCP につい て,誤差要因とその実用的な較正手法を示した.そこで は,一例として,約1°のミスアライメントがある場合, 標準的な船速において約0.1 m/s の誤差(バイアス)が船
の進行方向に直交する流速成分に生じることが示されて いる. 富山高等専門学校(富山高専)の練習船「若潮丸」(全 長54 m,総トン数231 t,Fig. 1)は ADCP を装備してお り,海技取得のための実習航海を行いながらの海潮流観 測が可能で,これまで富山湾及び周囲海域において,多 くの海潮流の観測と分析を行ってきた(千葉ら,2007, 2015a, 2015b; 小関ら,2016).同船に搭載された ADCP による船速データと CTD(Conductivity, Temperature and Depth Profiler)観測による水温や塩分の鉛直プロファイ ルに基づく地衡流計算により,富山湾南部の渦流の発 生機構を議論するといった研究成果も挙げた(千葉ら, 2015b). しかし,地衡流計算は2 点間の直線上を横切る平均的 な流れを把握するものであり,広い範囲の流れの空間分 布を把握するためには,多点の水温・塩分の鉛直プロ ファイルが必要である.CTD データを得るためには停 船観測を行わねばならず,海技教育の実習航海と並行 して多点での観測の実施は困難な場合が多い.そこで, 「若潮丸」の実習航海において,ADCP に加えて,停船 を要しない XCTD(投下式 eXpendable CTD)観測の実施 を試みた. 2016 年,2017 年に実施した観測において,ADCP 観 測で比較的一様な流れが観測されている海域について, XCTD 観測データによる地衡流計算を行った.これらの 観測データに基づいて,観測海域の流れの構造をつかむ とともに,ADCP 観測と地衡流計算の流速プロファイル を比較することによって,観測海域における流れの実 態把握,さらにはミスアライメントに伴う誤差検証及び 補正のための新たな方法を提案する.この方法により, ADCP 観測におけるミスアライメントに伴うバイアス誤 差の新たな較正手法の可能性について示す. 2. 「若潮丸」による ADCP・XCTD 観測 富山高専の練習船「若潮丸」に搭載された ADCP(RDI VM150)は,発振中心周波数が150 kHz で,8 m 層厚ご との観測が可能である.この ADCP システムでは水深 約200∼300 m 以内では対地船速を海底反射波から精 度よく得られるが,水深の深い富山湾ではほとんどが GPS から対地船速を得ることになる.ADCP の公称観測 精度は0.1 m/s 以下であるが,動揺しながら航走する船 舶での観測では,自船の対地針路速力の適正な補正や, データの平均化等により,正確な観測を行えるよう諸設 定を調整する必要がある.これまでの筆者らの観測実績 (千葉ら,2007, 2015a, 2015b; 小関ら,2016)より,GPS モードでの観測精度と観測限界はおおむね把握されて おり,富山湾北部を流れる対馬暖流(千葉ら,2007)や, 富山湾南部の直径20∼30 海里(約37∼56 km)程度の渦 流(千葉ら,2015b)の観測について報告してきた.こう した一連の観測でのデータ分析より,波高が1 m 程度以 下の海面状態で,船速が10 kt 程度以下,流速が約0.2∼ 0.3 m/s 以上の流れであれば,流向については少なくと も16 方位を決定しうる程度以上の精度で把握できるこ とが確認されている. 「若潮丸」には FSI 社の ICTD も搭載され,水深2,000 m までの CTD 観測が可能であるが,本報告の観測では, 先に述べた理由により観測効率を重視して,東京大学大 気海洋研究所が所管する XCTD システム((株)鶴見精機 の XBT/XCTD SYSTEM,プローブ XCTD-1:水温測定精 度±0.02°C,電気伝導度測定精度±0.03 mS/cm)による観 測を実施した. 3. 2016年9 月における富山湾から佐渡海峡での ADCP・ XCTD観測 3.1 観測航海の概要 「若潮丸」に学生が乗船する実習航海は,主に富山湾 内で行っているが,毎年8 月下旬または9 月には,新潟 方面への入渠航海を行っている.こうした航海において も ADCP 観測を実施し,富山湾から佐渡海峡における 流れの特性の分析を行ってきた(小関ら,2016).流れ の構造のより詳しい理解のためには,同海域における 海水密度の鉛直分布の把握が有効と考えられることか ら,2016 年9 月1 日に実施された,「若潮丸」の富山新 港から新潟港への航海において,ADCP 観測に併せて, XCTD 観測を行った. 3.2 ADCPデータの処理方法 Fig. 2 に,BT モ ー ド で の,(a)20 m, (b)52 m, (c)84 m 深における ADCP 観測の結果を示す.赤線が,灰色線 の航路に沿って得られた,ADCP 観測による流向流速の ベクトルである.この観測では,層厚8 m・層数64 と設 定している.この設定では,水深約500 m まで海底面か らの反射波の検知が可能であるが,海水中からの流速計 測のために有効な反射波を捉えられるのは,200∼300 m が限界である.測定可能な一番浅い水深は,船底部の センサーから約16 m であり,このセンサーが船の喫水 線下約4 m にあるため,観測最浅層は海面下20 m 層と なる.以下の測定データについては,この4 m を加えた 値を観測水深としている.Ping の発振間隔は3 秒で,10 発振分,すなわち30 秒を1 アンサンブルデータとして
Fig. 1 Overview of Wakashio-maru (Length 54 m: Gross ton-nage 231 t: Service speed: 10‒12 kt) and the research equip-ment, ADCP and CTD.
いるが,観測状況に応じて,2∼3 アンサンブルを,移 動平均あるいはボックス平均化したデータを表示した. これらの設定は「若潮丸」の約10 kt の船速と動揺特性, 富山湾というフィールドで表層から200 m 深までの流れ のデータを安定的に取得するために,メーカによる推奨 設定を参考に,実際の観測による試行錯誤から経験的に
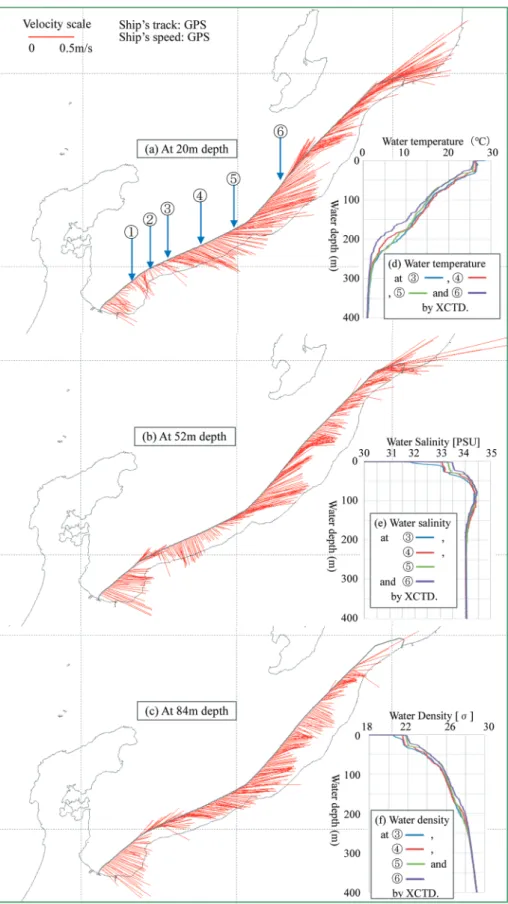
Fig. 2 The ADCP measurement result at depth of (a) 20 m, (b) 52 m and (c) 84 m with bottom tracking reference and XCTD measurement results of (d) temperature, (e) salinity and (f) density at ①, ② and ③. ①‒⑥ in (a) are the XCTD stations. The Wakashio-maru cruised from Toyama Shin Port to Niigata Port during approx. 0600‒1700 1st. Sept. 2016.
実用上の最適値として決定したものである. 3.3 ADCP及び XCTD 観測結果の分析
Fig. 2 と同様に,Fig. 3 には,GPS モードによる ADCP 観測結果を示した.Figs. 2, 3 の(a)内に示す,①∼⑥が
XCTD 観測点である.Fig. 2 の右方には,XCTD 観測結 果による,(d)水温(°C),(e)塩分[PSU],(f)密度[σ] の鉛直プロファイルを,①∼③について示す.同様に, Fig. 3 では,③∼⑥について示す.水温と塩分の鉛直プ
Fig. 3 The ADCP measurement result at depth of (a) 20 m, (b) 52 m and (c) 84 m with GPS speed reference and XCTD measurement results of (d) temperature, (e) salinity and (f) density at ③, ④, ⑤ and ⑥. ①‒⑥ in (a) are the XCTD stations during the same cruise as shown in Fig. 2.
ロファイルから,海表面から約30 m 深までは,夏季に おける表層の加熱と河川水影響により,高温・低塩分で 成層していることがわかる.これ以深の約30 m 深から 約150 m 深までは,高塩分となり,約100 m 深で34.3∼ 34.4 の極大値を取っている.筆者らのこれまでの観測実 績と分析(千葉ら,2011, 2015a)から,この約30 m 深か ら約150 m 深は,対馬暖流水の影響が強い水塊が分布し ているものと推測される.そして,約300 m よりも深い 層は,水温と塩分が安定した日本海固有水領域となって いる.すなわち,海表面から約300 m 深では,6 つの観 測地点間において,水温は約2∼3°C,塩分は0.2∼0.3 の ばらつきがあるが,約300 m 以深では地点間の差異が非 常に小さい.こうした水温と塩分の鉛直分布が,密度の 鉛直プロファイルにも反映されている. Fig. 2 に示す ADCP 観測結果より,⑤の地点以降では BT モードでの観測が得られており,対馬暖流が佐渡海 峡を西から東へ進入していく一端を捉えていると推測 できる.また,小関ら(2016)は佐渡島南方での蛇行を 確認したが,⑥近辺における流速ベクトルの流向の変 化にも同様の状況が捉えられている.しかし,伏木富 山港出港後間もなくから⑤の近辺までは水深が大きく, BT モードでの観測はほとんどが不可能であった.②∼ ③近辺では例外的に BT モードでの観測データが得られ ており,北向きの流れが観測された.XCTD 観測結果を みると,この北向流の近辺の①∼③では表層の塩分が約 30∼33(Fig. 2(e))で,④∼⑥の約33∼33.5(Fig. 3(e))よ り低いことから,富山湾東部の河川水からの流入水の影 響と考えられる.富山湾南部では夏季に反時計回りの渦 流が発生していることが,これまでの ADCP 観測や人 工衛星リモートセンシングのクロロフィル a 濃度観測画 像により観測され,この渦流の発生には,夏季に低密度 で上層に成層する河川水と,この下層の高密度の対馬暖 流水の両者が寄与している(千葉ら,2015b).①∼③近 辺での低塩分水は,こうした渦流の発生現象の一端を捉 えているものと考えられる. Fig. 3 に示す,GPS モードの ADCP 観測結果を見る と,佐渡海峡を西から東に向かう流れの傾向は見られる が,流速ベクトルが全体的に針路の右方向に偏っている 傾向が顕著である.これは,当該観測において,ミスア ライメントエラーが発生していることが考えられる.そ こで,(株)エス・イー・エイ自社制作の ADCP データ 処理及び描画ソフトウェア ADCP Tracker により,ミス アライメント角評価によるデータ補正を試みた.ADCP Tracker では,ミスアライメント角を任意に入力し,そ のミスアライメント角により計算された ADCP データ を得ることができる.このソフトウェアにより,まずミ スアライメント角が−2.0∼+2.0°の範囲を0.5°刻みで再 計算し,Fig. 2 と近い流速ベクトルの分布となっていた +1.0∼+2.0°の範囲を0.1°刻みで変更しながら再計算し たところ,ミスアライメント角度+1.5°として得られた データである Fig. 4 が,Fig. 2 で示した BT モードとほ ぼ同様の流向流速の空間分布になることが確認できた. これまでの数多くの ADCP 観測に基づき,「若潮丸」 の ADCP システムには,あらかじめ最適なミスアライ メント補正値を入力済であった.今回の出港前にも,船 のジャイロコンパスと ADCP システムの針路指示値と の照合を行ったにもかかわらず,観測の結果,ミスアラ イメントによる誤差が露見した.そのため,本航海後の 入渠時に検査したところ,コンパスのジャイロ駆動部に 不具合が生じており,指示値に約1.5°のずれがあること が判明した.すなわち,Fig. 4 に示した補正後のデータ は,Fig. 3 の観測値からソフトウェアで得たミスアライ メント角を用いて計算したものであるが,そのミスアラ イメント角は,別途ジャイロコンパスのハードウェア検 査によっても確認されたことになる. 3.4 XCTD観測結果からの地衡流計算 ADCP 観測結果で流れの傾向がそれぞれ比較的安定し ている,③∼④, ④∼⑤, ⑤∼⑥の各区間で,XCTD 観測 結果をもとに地衡流計算を行った.地衡流は,2 地点間 の海水密度の鉛直分布により生じる力学的な高低差とコ リオリ力が平衡した状態にある流れである.富山県水 産研究所では,富山湾内外に34 定点を定めて,原則月 一回の専属の調査船による CTD 等による海洋観測を実 施している.同所の内山(1993)は,この CTD 観測によ る水温・塩分の観測値から地衡流計算を行い,約20∼ 300 m 深度での流動パターンを推定した.本論では,停 船を必要としない XCTD 観測データに基づいて同様の 計算を行った. XCTD 観測結果から,無流面を日本海固有水の占める 層にあたる400 m に設定し,XCTD システムで観測され た水温,塩分から計算された1 m ごとの平均密度値によ り力学的海面高を求め,地衡流計算を行った.Fig. 4 に おいて,ADCP 観測結果と地衡流計算結果を比較する と,ADCP で捉えた全般的には西から東への流れと,水 深が深くなるにつれて流速が減少する傾向が,地衡流計 算の結果と定性的には一致していることが確認できる. 地衡流計算で得られる二地点間を結んだ直線に直交す る流れの成分とより直接的な比較を行うために,ADCP による流向流速から船の針路に対する直交成分を計算し た.Figs. 5, 6 は,それぞれ③から④,④から⑤の区間の 比較結果である.ADCP のデータはミスアライメント補 正を施す前の GPS モードのデータ(Fig. 3 参照)を使用 し,各図の左に5 分ごとの1 アンサンブル(30 秒観測の 平均値)の流速鉛直プロファイルのスナップショットに ついて,それぞれ色分けして,船の針路方向に直交する 成分の鉛直分布を示した.縦軸は水深(Water depth)と, これに対応した観測層番号(Observation layer No.)の 2 軸で表現した.各鉛直プロファイルには時間的,場所 的な変化によりばらつきが見られることから,各グラフ の右には,これら5 分ごとの流速鉛直プロファイルのス ナップショットの平均流速鉛直プロファイルを灰色線で 示した. Fig. 5 において,地衡流速と ADCP 観測流速の鉛直分 布を比較すると,水深が約100 m 以深では,ADCP 観測
流速の方が,地衡流速より全体的に約0.15 m/s 大きい. それより上層,約70∼100 m 深では双方が約0.05 m/s 以 下の差となり,ADCP の計測精度以内となっているが, これ以浅では双方共に,表層まで約0.2∼0.3 m/s に流速 成分値が上昇している.約30 m 深から表層にかけては, 地衡流速が増加している一方で,ADCP 流速は減少傾向
Fig. 4 The ADCP measurement result at depth of (a) 20 m, (b) 52 m and (c) 84 m at GPS speed reference with +1.5 degrees correction for misalignment and the geostrophic velocity calculated from XCTD measurements at (d) ③→④, (e) ④→⑤ and (f) ⑤→⑥, respec-tively, on board the same cruise of Wakashio-maru shown in Fig. 2 and Fig. 3.
が見られる.この点については後述する.
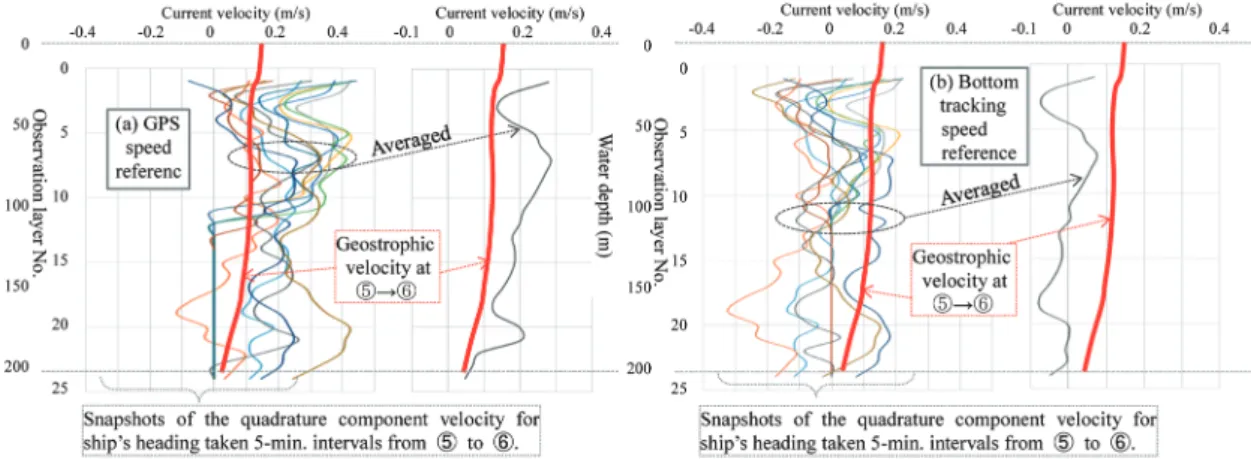
Fig. 6 も,Fig. 5 と同様,地衡流速と ADCP 観測流速 の鉛直分布の比較である.ここでも,約100 m 以深では, ADCP 観測流速の方が,地衡流速より全体的に約0.15∼ 0.2 m/s 大きい.約70∼100 m 深では,ここでも双方が約 0.05 m/s 程度の差で ADCP の計測精度以内の違いである が,これ以浅から表層では双方共に約0.2∼0.3 m/s に流 速成分値が上昇するなど,Fig. 5 で示した結果と同様の 様相を呈している. Figs. 5, 6 からわかるのは,この観測においては,約 100 m 以 深 で は ADCP 流 速 は 地 衡 流 に 約0.2 m/s の オ フセット値が加わった状態になっている一方,この層 では両者の鉛直シアーの構造はよく一致している.約 70∼100 m 深の層ではオフセットが一旦解消し,さらに 上層,すなわち密度躍層よりも上では ADCP 観測,地 衡流速ともに,定性的には同様の鉛直シアーの構造を示 すものの,約0.1∼0.2 m/s のオフセットが見られる. Fig. 7 は,⑤から⑥に向かう区間の,地衡流速とADCP 観測流速の鉛直分布の比較である.この海域では,BT モードでの観測が行えているので,(a) GPS モード(ミス アライメント補正前),(b) BT モードの各場合について示 した.双方の ADCP 流速を見ると,BT モードに対して, GPS モードの方が約0.2 m/s のオフセット値がのった状態 であることがわかる.なお,ADCP 観測の平均値につい て,航路上の浅水深海域で観測不能であった下層のデー タについては除外して計算している.地衡流速と ADCP 観測流速の平均値との比較では,地衡流速は,表層での 約0.15 m/s から,200 m 深で約0.05 m/s まで小さくなって いるが,水深約20∼30 m と約170 m において,流速減少 の勾配の変化がみられる.ADCP 観測値においては,こ れらの深度付近で極値がみられることから,詳細不明な がら海洋構造の変化を反映した流れの変化が捉えられて いる可能性がある.
Fig. 7(a), (b)を全体的に見ると,(a) GPS モードにお
Fig. 5 Comparison of the geostrophic velocity (red line) based on the XCTD data shown in Fig. 3 for ③→④ and the ADCP measurement results
For ADCP data with GPS speed reference (Fig. 3), (left sec-tion) the snap shots are one ensemble (averaged for 30 s) data taken at 5-min. intervals and (right section) grey lines are averaged value for the snapshots. All the profiles indicate the quadrature component velocity for the ship s heading.
Fig. 6 Comparison of the geostrophic velocity (red lines) based on the XCTD data shown in Fig. 3 for ④→⑤ and the ADCP measurement results
For ADCP data with GPS speed reference (Fig. 3), same as shown in Fig. 5 but for the stations between, ④ and ⑤.
Fig. 7 Comparison of the geostrophic velocity based on the XCTD data shown in Fig. 3 for ⑤→⑥ and the ADCP measurement results For ADCP data with (a) GPS reference and (b) bottom-tracking. In both panels (a) and (b), (left section) the snapshots are one en-semble (averaged for 30 s) data taken at 5-min. intervals and (right section) the grey lines are averaged value for the snapshots. All the profiles indicate the quadrature component velocity for the ship s heading.
いては,地衡流速に対して,ADCP 観測流速が約0.1∼ 0.15 m/s のオフセット値がのった状態になっている.こ れに対して,(b) BT モードでは,マイナス側に約0.1∼ 0.15 m/s のオフセット値がのった状態となっている.こ の海域は水深が浅く,地衡流計算における無流面の仮 定が必ずしも適切に適用できない可能性もあり,地衡流 自身にもオフセットがありうる.この点も考慮すれば, ADCP 観測結果において,BT モードに対して,GPS モードが約0.15∼0.2 m/s のオフセット値がのった状態と も言え,これは Figs. 5, 6 の地衡流速と ADCP 観測値と の関係と同様の値である.ADCP 流速に見られる30 m 深より上層における大きな流速変化を除けば,地衡流速 の鉛直シアーと,ADCP 流速の鉛直シアーは GPS モー ド,BT モードともによく似た傾向を示している. これら一連の比較から,この観測を行った際の ADCP 流速(GPS モード)には,全体的に約0.15∼0.2 m/s のオ フセット(バイアス)が船の進行方向に直交する成分に 乗った状態であったと考えることができる.船の針路 方向に直交する流速成分に対するバイアスの最も可能 性の高い要因はミスアライメント誤差である.地衡流 速との比較の結果,ADCP 流速(GPS モード,BT モー ド)が地衡流の鉛直シアーを概ねよく計測できていたこ と,GPS モードによる ADCP 流速が,ほぼ一定のオフ セット値を示したこと,さらには,そのオフセットの値 は GPS モードと BT モードの比較から推測される値と 同様であったことから,XCTD 観測に基づく地衡流計算 結果を用いて ADCP のミスアライメント誤差の補正が 可能であることが示唆される.ちなみに,船速10 kt で, 船の針路方向に直交する流速成分に0.15 m/s のオフセッ ト(バイアス誤差)がある場合,それがミスアライメン トに起因するとすれば,推定されるミスアライメント角 は約1.7°となり(Michida & Ishii, 2000),Fig. 3 から Fig. 4 を得る際に得られた1.5°とほぼ同じ数値になる.すなわ ち,XCTD 等の観測を行って地衡流計算を行い,ADCP 流速の地衡流に対するオフセット値を評価することがで きれば,従来の手法とは全く独立の方法で,ミスアライ メント誤差の補正が可能であることを意味する. 本章の前半部でいったん保留した,約50 m 深以浅の 層における ADCP 流速と地衡流速の大きな差異につい て若干の議論を加える.上記の議論における「一定のオ フセット」とは言いがたい差が Fig. 5 等に見られたが, これは地衡流速には反映されない吹送流成分に起因する 可能性がある.今回の航路近辺のアメダスポイントとし て糸魚川と柏崎の風観測のデータを確認したところ,こ の航海の直前の2016 年8 月29 日から31 日は,南寄りの 風が,最大風速約7∼10 m/s で連続的に吹いていた.そ の後,航海を行った9 月1 日には最大風速5 m/s 以下の 状態となっている.ADCP 観測流速において,針路から 右側に直交する流速成分の表層から約30 m 深までの変 化(浅部に向け減少)が,地衡流速の変化(浅部に向け 増大)と逆の傾向となっているのは,前日までの海上風 による吹送流成分の影響が地衡流計算には反映されてい ないことによるものと推定している. 4. 2017年10 月における富山湾での ADCP・XCTD 観測 4.1 観測航海の概要 Fig. 8 は,「若潮丸」により2017 年10 月26 日に実施し た富山大学理学部地球科学科の学生の海洋実習の際の航 跡と ADCP 観測結果を示している.この実習では,富 山新港から氷見沖へ北行し,水深が約1,000 m を超える
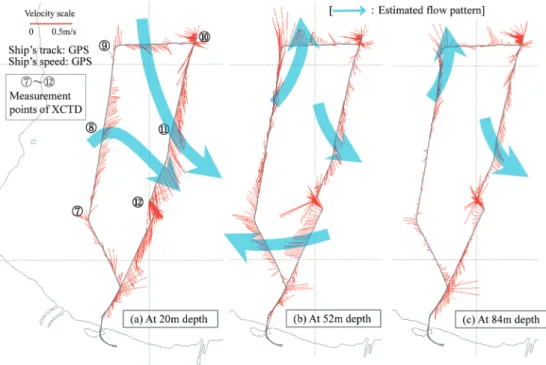
Fig. 8 ADCP measurement result at depth of (a) 20 m, (b) 52 m and (c) 84 m with GPS speed reference. ⑦ to ⑫ in (a) are XCTD stations in the cruise for students of University of Toyama on board Wakashio-maru during approx. 1030‒1600 26th Oct. 2017.
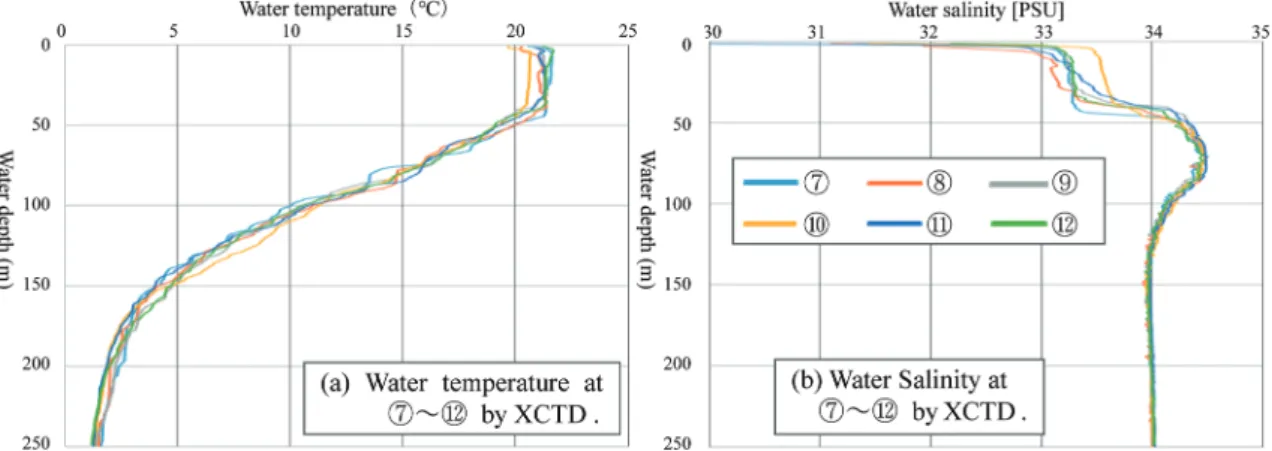
海域で CTD 観測等を行い,その後に南行して富山新港 に帰港する約6 時間の航海を行った.富山大学の実習航 海は,2005 年から続けて毎年一回,ほぼ同じ航程で実 施してきている.この航海においては,従来から,2 点 における CTD 観測と航跡上での ADCP 観測を行い,富 山湾内の水塊構造と流れの分布の把握観測を行ってき た.海技教育機関の練習船は,海技免許取得のための航 海実習が主目的であるため,長時間の海洋観測を行うた めには,様々な制約がかかってくる.毎年のこの観測で は,練習船を国土交通省地方運輸局の臨時検査を受けて 旅客及び観測船対応とすることによる航海時間の制限 と,海洋観測に充てることが可能な乗組員の労力の制限 といった制約条件のため,CTD 観測はわずか2 点と限 られてはいるが,地衡流計算による流れの構造把握も試 みてきた. 例年の ADCP 観測結果から,この海域の流れは,複 雑な状況をしていることが推測できたが,2 点での CTD 観測結果に基づく地衡流計算等では,当該海域の中のご く一部の傾向が捉えられただけであった.そこで,2017 年の航海では,Fig. 8(a)に⑦∼⑫で示す6 点で XCTD 観 測を実施し,従来よりも空間的に密な海洋構造の把握を 試みた. 4.2 ADCP及び XCTD 観測結果の分析
Fig. 8(a)∼(c)に,GPS モードでの,(a)20 m, (b)52 m, (c)84 m の各深度での ADCP 観測結果を示す.前述の通 り本船搭載の ADCP では BT モード観測の限界水深が約 200∼300 m であることから,この航程ではごく沿岸部 のみ BT モードの観測が可能で,全体的に GPS モード での観測が主となっている. ここでは,Fig. 3 に見られたような ADCP 観測ベクト ルが針路片側(右側)に偏るといった傾向はなく,ミス アライメントは無視できる,あるいは補正が適切になさ れているものと推定される.この計測結果から,北行と 南行で一定時間を変針することなく航走した観測結果を 全体的に俯瞰して,この時の富山湾内の流れのパターン として,推定流線を Fig. 8 中に青色の太矢印で描いた. Fig. 9(a), (b)には,Fig. 8(a)に示した6 か所の XCTD 観測値を,表層から250 m 深まで示す.この観測海域 において,200 m 以深は日本海固有水領域とみられ,水 温,塩分共にほぼ一定値となる.これらの観測結果を比 較すると,沿岸表層水と対馬暖流水の影響を受ける表層 から約200 m 深までの領域においては,水温,塩分共に 空間変化が見られ,その影響により密度も変化する.こ の XCTD 観測値をもとに,水温と塩分から算出した密 度値の鉛直分布から,各観測点間の地衡流計算を実施し た. 4.3 XCTD観測結果からの地衡流計算 Fig. 10 に地衡流計算の結果を,ADCP 観測結果と比較 して示す.地衡流計算結果は赤太線で示し,東北東方 向への流れの傾向が顕著な⑧∼⑨の区間の結果(左上), 南東方向への流れの傾向が顕著な⑨∼⑩の区間の結果 (右上),そして,ADCP 観測結果から推測した Fig. 8 中 の青矢印で示す流れのパターンが正しいとすれば,おそ らくは⑧∼⑨の流れと,⑨∼⑩の流れが合流して,南東 方向への流れになっていると推測される⑫∼⑪の区間 の結果(左下)を示した.ここで,無流面は XCTD 観測 結果をもとに,日本海固有水が占めていると思われる 200 m に設定した. ADCP データについては,Figs. 5∼7 と同様に,各図 の左に5 分ごとの30 秒観測の平均値の流速の値につい て,地衡流計算結果と比較するために,船の針路方向 に直交する成分を示した.8 m 間隔の各層での観測値か ら算出した直交成分の鉛直分布を場所ごとに色分けし てある.Figs. 5∼7 と同様に,図の左の ADCP 観測デー タを見ると,時間的,空間的な変化により,ばらつきが 見られる.そこで同様に各グラフの右では,5 分ごとの ADCP 観測値の平均値を示し,これと地衡流速との比較 を行った. Fig. 10 に示した3 海域における地衡流計算と ADCP 観測の比較では,ADCP 観測による流れの針路に対する 直交成分の平均鉛直プロファイルは,地衡流の鉛直分布 と非常によく一致している.流速の絶対値の比較につい ても,Fig. 10(b)で示す,⑨∼⑩の区間における50 m 深 度近辺では約0.1 m/s 程度の差が見られるものの,他で は約0.05 m/s 以下の差でよく一致している.⑨∼⑩の区 間における深度50 m 近辺において両者に相対的に大き
な差異があるとはいえ,ADCP 観測値と地衡流計算値共 に流速が負の値(流向が針路に対して左側方向)でピー クを取るといった部分は一致している.本観測及び分 析の結果から,ここで得られた富山湾の流れは,地衡流 バランスの状態にあるとみなせることが,ADCP 観測と XCTD の多点観測及び地衡流計算より推測できる. これまでの富山湾での ADCP 観測の結果から,この 海域における潮汐流の影響は非常に小さく,主に能登半 島を 回してくる対馬暖流水と沿岸部に大量に流入して いる河川水の影響を強く受けた水塊により構成される 流れであることがわかっている(千葉ら,2015a).そし て,この流れは,基本的に地衡流バランスとなっている ことが報告されており(千葉ら,2015b),ここで示した 2017 年10 月の海洋実習航海における観測結果も,従来 の知見を支持するものと考えられる. 5. 議論およびまとめと今後の展望 5.1 XCTD観測による地衡流計算によるミスアライメ ント補正 3 章で示した事例では,富山湾から佐渡海峡の流れに ついて ADCP 観測と地衡流計算の比較による分析を試 みたが,地衡流計算では表現されない吹送流の影響と思 われる成分が表層付近で見られ,ここでは ADCP 観測 結果と地衡流速の対応がよくない場合があった.しか し,3 章に示した観測データの分析においては,佐渡海 峡に近づいた海域(Fig. 2 の⑤∼⑥)では,水深が浅いこ とから BT モードによる ADCP 流速が得られており,当 該海域において GPS モードの ADCP 流速と BT モード による ADCP 流速を比較することにより,ミスアライ メント誤差が,XCTD 観測結果に基づく地衡流計算との 比較によって評価できる可能性を示した.そして,GPS モードによる計測値と BT モードによる計測値が同時に 得られた浅海域のデータから推定されたミスアライメン ト角と,地衡流速との比較から推定された同角がほぼ同 じ値であったことから,この手法の妥当性が示されたと 言える.この手法は Michida & Ishii(2000)や道田(2014) に記述された,空間的にほぼ一様な海流となっていると みなせる海域において異なる船速ベクトルの観測デー タ(往復観測など)を分析することでミスアライメント 角を精度よく見積もる手法とは完全に独立のものであ る.すなわち,CTD や XCTD データを用いた地衡流計 算は ADCP 観測とは次元の異なる流速情報を提供する
Fig. 10 Comparison of the geostrophic velocity based on the XCTD data shown in Fig. 9 for (a) ⑧→⑨, (b) ⑨→⑩ and (c) ⑫→⑪, and the ADCP measurement results
For ADCP data with GPS reference (Fig. 8), in all panels (a), (b) and (c), (left section) the snapshots are one ensemble (averaged for 30 s) data taken at 5-min. intervals and (right section) the grey lines are averaged value for the snapshots. All the profiles indicate the quadrature component velocity for the ship s heading.
ものであり,測器としての ADCP の特性等に依存しな い独立の情報であることを強調しておく.ADCP 観測 データだけでミスアライメント角を推定する Michida & Ishii(2000)等の手法は,ADCP 観測だけで閉じていると いう点で利点もあるが,本論で扱っている練習船等の運 航上の制約が観測船等に比べて大きい船舶では,往復観 測等の実施が事実上不可能であるケースもある.その 点,ここで示した手法は,航海予定に影響を与えること なく,巡航中に XCTD 観測を行えば可能であるという オペレーション上極めて有利な面がある.原理的には, 航走中に適当な距離間隔で XCTD 観測を2 点実施すれ ばミスアライメント角の推定が可能である. 4 章に示した観測データの分析からは,富山湾南部で の流れの分布が ADCP 観測でよく捉えられ,それは地 衡流計算での結果とよく一致していた.ADCP 観測デー タだけ見てもミスアライメントがなかった,あるいは 適切に補正されていたものと推測されたが,ADCP とは 独立な観測データから得た地衡流プロファイルと ADCP 観測による平均流速プロファイルがよく一致していたこ とは,結果としてミスアライメント補正が適正に成され ていたことを補強する材料を提供したことにもなる. 5.2 慣性振動成分の影響 しかし,こうした ADCP 観測値には,強風や河川水 によるバルジ形成に起因する慣性振動流成分も大なり小 なり必ず含まれていると考えられることから,以下,本 論で述べた分析に与える当該成分の影響について考察す る. 富山湾周辺海域においては,能登半島東岸付近海上で 台風や発達した低気圧が通過した際に,急潮がしばし ば発生することが報告されている(大慶ら,2012).こ の現象が,慣性振動に起因するものであることが,実際 の台風の通過時における ADCP による定点観測結果や, 計算モデルでの再現で示されている(久賀ら,2018). こうした慣性振動による流れの影響が,本論で対象とし ている流速が約0.05∼0.1 m/s の精度での議論において顕 著になるのは,大規模な気象擾乱の通過後の2∼3 日ま でと考えられる.しかし,強風直後の観測等において は,こうした慣性振動成分の影響についての検討が必要 と思われる. また,河川水流入により,河口付近にバルジが形成さ れると,この内部に慣性振動が発生する(Simpson, 1997). 富山湾においては,夏季に大型河川の河口にバルジが形 成され,この低密度で上層に成層する河川水と,下層の高 密度の対馬暖流水が寄与して,直径が20∼30 海里の渦流 が発生していることが報告されている(千葉ら,2015b). 3.3 節に示したように,Fig. 2 の①∼③までの表層の低い 塩分水は,こうした河川水が影響しているものと推定され る.一方,Fig. 8 に示す観測の実施日は10 月26 日で,す でに富山湾内では冬季の鉛直混合が始まる時期にあたる. ⑦∼⑫の観測範囲では,Fig. 9 の XCTD データをみると, 極表層以外では水深が約50 m まで鉛直混合を形成し,そ の塩分も約33∼34 の範囲にあり,顕著な河川水影響のバ ルジや渦流は観測されていない.したがって,本論で示 した富山湾内の広範囲な流れの分布傾向は,基本的には 地衡流バランスが支配的になっていると考えて差し支えな いものと思われる.ただし,より沿岸部においては,バル ジ形成の影響,それに伴う慣性振動成分の存在が無視で きない可能性がある.これらの点については,今後の検討 課題としたい. 続いて,地衡流計算に反映されない成分の一つであ る慣性振動による流れは ADCP 観測値に含まれており, これが本論で展開した地衡流計算と ADCP 流速の比較 によるミスアライメント補正に関する議論にどのように 影響するか検討を加える.本論でミスアライメント補正 計算の対象とした Fig. 2 の XCTD 観測ポイント③から ⑥にかけての海域は岸に近く,慣性振動成分も一様では ないかもしれないが,仮に一般的な理論上示されるよ うな慣性振動が存在していたとして以下の検討を行う. Fig. 2 の③∼④と④∼⑤は,それぞれの区間の中央は, おおよそ8 時半と9 時半であり,観測時間に約1 時間の ずれがある.この海域の緯度(約37.0∼37.2°N)におけ る慣性周期約19.8∼19.9 時間を踏まえて計算すると,両 区間における船の針路に直交する流速成分に対して,慣 性振動の位相によっては,最大で慣性振動流の振幅の 約30% の大きさのバイアス差が生じる.これは,仮に 慣性振動流の大きさが1 ノットだとすると,0.3 ノット すなわち約0.15 m/s の流速となり無視できないものにな る.しかし,Fig. 5 および Fig. 6 に示した両区間の流速 値に大きな差は見られない.また,観測時は強い慣性振 動が励起されるような気象条件や海況ではなかったと 考えられること,ADCP 観測で得られた流速の水平分布 (Fig. 3)に慣性振動の存在を示すような構造(時間とと もに時計回りに流向が変化するなど)が認められるわけ ではないこと,さらに河川水に起因するバルジの影響が 及ぶ海域からは離れていることを考慮すれば,ここで示 したミスアライメント補正手法に関する議論において, 慣性振動流成分による影響は小さいものと思われる.こ こで3 章の結果を振り返ると,佐渡海峡の浅い海域にお いて BT モードと GPS モードの流速値の比較から評価 されたミスアライメント角と,地衡流計算と ADCP 流 速の比較から推定されたそれがほぼ同じ値であった.こ のことは,当該解析において慣性振動成分は小さかった ことを間接的に示しているといえる. しかしながら,今後ここで示した手法でミスアライメ ント補正を行う際には,現場海域における慣性振動の存 在にも十分に注意を払う必要があることを指摘してお く. 5.3 残された課題と今後の展望 本報告では,ADCP 観測結果と地衡流計算との比較を 行ってきたが,考慮すべき非地衡流成分に関する対処に ついて,以下にまとめる. (i) 潮流:4.3 節に示したように,日本海での影響 は小さい. (ii) 吹送流:3.4 節に示したように,強風が連続し
た場合は表層において影響が出ている. (iii) 慣性振動:5.1 節に示したように,本観測にお いては顕著な影響はない. ミスアライメントは,船速が変わらなければ時間変化 を行わず,鉛直方向にも一定値となる.本報告は,(i)∼ (iii)の影響を推測し,データ内の影響を考察した.こう した考察に基づく,ADCP 観測結果と地衡流計算結果と の比較から,正当なミスアライメント値を評価できたと 言える. しかし,本報告は,短い観測航海2 回の結果に基づ くもので,富山湾から佐渡に至る海域の海洋構造の把 握は,地衡流計算のために実施した XCTD 観測の全部 で12 点に過ぎない.したがって,XCTD 観測に基づく 地衡流の鉛直プロファイルが,対応する航跡上の ADCP 観測によるそれと統計的にどのくらいの確かさで一致し ていたか,という議論には十分耐えられるデータセット ではない.そのため,得られた結果から,観測のためだ けのシップタイムを必要としない XCTD 観測に基づく 地衡流計算が,ADCP 観測につきもののミスアライメン ト誤差の評価ないしは補正に使うことができるという可 能性を示すことに主眼を置いた記述を行った.より定量 的に信頼性の高い議論を行うためには,異なる海況条件 や観測形態において本報告で記述したような観測データ を蓄積し,解析を深化させる必要がある.この点は今後 の重要な課題と認識している. また,「若潮丸」は海洋観測を主たる任務とする船で はないが,富山湾を主フィールドとした海技実習航海 を,年間を通じて数多く実施している.ここで報告した ような,船舶が航走しながら行う流れや水塊構造の把握 を,ADCP 観測のミスアライメント補正も含めて精度よ く実施できるとなれば,「若潮丸」のような実習船を活 用した海洋現象の把握のレベルの向上につながるものと 考えられる.Fig. 8 では一例として一回の ADCP 観測結 果からの大まかに推測した海流分布,想定流線を示した が,これと同程度以上の精度での観測を重ねることによ り,季節変動特性を含め,当該海域の海況に関する知見 を深めることが期待できる.近年は,数値計算や人工衛 星観測による海況の把握や予測の技術も進んでいるが, シーツルースデータ Sea truth data による精度向上や検 証は不可欠である.本研究の成果は,観測を専門とする 船ではなくても,船舶運用の観点から比較的負担の少な い手法により,こうしたデータの時空間密度を向上させ うることを示したとも言える.海技教育実習を主目的と する商船系高等専門学校が保有する各実習用船舶の,主 活動を行いながらの海洋観測分野への有効活用といった 将来展望にも,一石を投じたものと考えている. 謝 辞 富山高等専門学校の臨海実習場の皆様,同校商船学科 准教授の福留研一先生,「若潮丸」の乗組員の皆様には 観測に多くのご協力を頂きました.(株)エス・イー・エ イの皆様には,ADCP の観測精度評価やデータ処理につ いて,多くのご教授を頂きました.ご協力頂いた皆様に 謝意を表します.本研究の一部は(公財)環日本海環境 協力センターの「富山湾プロジェクト」,平成26 年度採 択の科学研究費補助金(15K06625)「河川水と海流が複 合影響を及ぼす沿岸域における海水構造・流動の特性把 握」によるものです.匿名の査読者からは,本稿の主た る論点に係る極めて重要なご指摘をいただきました.特 に記して感謝申し上げます. 参考文献 千葉元,古山彰一,横井幸治,2007.船舶搭載型 ADCP によ る対馬海流の流向流速計測.電気学会論文誌,C127, 694‒704. 千葉元,濵田健史,道田豊,橋本心太郎,2015a.船舶搭載型 CTD・ADCP による富山湾の海洋環境調査.日本航海 学会論文集,132, 86‒96. 千葉元,道田豊,古山彰一,橋本心太郎,2015b.船舶搭載 型 ADCP で捉えられた富山湾の流れの特性̶夏期湾奥 部で発生する反時計回りの渦について̶.海洋調査技 術,27, 1‒14. 千葉元,竹内章,三輪哲也,町山栄章,楠本成寿,鮑巴達拉 胡,松本恭平,桐山綾香,松浦知徳,古山彰一,杉江 実宝,2011.CTD・音響測深機・深海画像による富山 トラフの海洋構造調査.Blue Earth 11, 11‒29. 石井春雄,2006.船舶搭載型3 ビーム式 ADCP の測定流速誤 差と補正.海洋情報部研究報告,42, 61‒87. 久賀みづき,井桁庸介,広瀬直毅,渡邊達郎,2018.高解像 度海洋モデルで再現された富山湾周辺海域における近 慣性内部波・沿岸補足波の発生・伝播過程.La mer, 56, 95‒111. 道田豊,2014.海洋音響学会(編)海洋音響の基礎と応用 第 17 章 海洋の計測.成山堂書店.
Michida, Y. & H. Ishii, 2000. A practical method of current mea-surement with three-beam type shipmounted ADCP. J. Adv. Mar. Sci. Tech., 6, 29‒44.
大慶則之,奥野充一, 俊宏,千手智晴,2012.能登半島周 辺に急潮を引き起こす気象現象の特徴の解明̶急潮防 災を目指して.水産海洋研究,76, 131‒140. 小関修治,千葉元,道田豊,橋本心太郎,2016.船舶搭載型 ADCP で捉えた富山湾から佐渡海峡の流れの特徴.日 本航海学会論文集,134, 66‒72.
Simpson, J. H., 1997. Physical processes in the ROFI regime. J. Mar. Syst., 12, 3‒15. 田中照喜,中川拓朗,千葉元,古山彰一,横井幸治,2010. 船載型 ADCP 計測について.日本航海学会誌 Naviga-tion, 172, 63‒72. 内山勇,1993.富山湾及び周辺海域の平均的流動パターン. 富山県水産試験場報告,4, 11‒30.
* * * * * * *
Check and Correction of ADCP Measured Current Speed by the Comparison with the
Geostrophic Calculation based on XCTD Observation
Hajime Chiba*1, Yutaka Michida*2, Tomonori Matsuura*3, #, Emi Kanayama*4
*1 Shipping Technology Department, National Institute of Technology, Oshima College, 1091‒1 Komatsu, Suo-Oshima, Oshima, Yamaguchi
742‒2139, Japan
*2 Atmosphere and Ocean Research Institute, The University of Tokyo, 5‒1‒5 Kashiwanoha, Kashiwa, Chiba 277‒8564, Japan *3 Faculty of Sustainable Design, University of Toyama, 3190 Gofuku, Toyama 980‒8555, Japan
*4 Training Ship Wakashio maru, National Institute of Technology, Toyama College, 1‒2 Ebie-neriya, Imizu, Toyama 933‒0293, Japan
# Present address: Atmosphere and Ocean Research Institute, The University of Tokyo