平成 30 年度 修士論文
複雑な構造をもつ生体組織の
実時間せん断波映像法による評価
指導教員 山越 芳樹 教授
群馬大学理工学府 理工学専攻
電子情報・数理教育プログラム
谷内 華菜
1 複雑な構造をもつ生体組織の実時間せん断波映像法による評価 目次 頁 第1章 序論 3 第2章 せん断波計測について 4 2-1 せん断波とは 2-2 生体内の組織における低周波振動の伝搬 2-3 せん断波計測で期待されるパラメータと臨床的有用性 第3章 カラードップラせん断波映像法の原理 8 3-1 超音波パルスドプラ法による組織内振動伝搬計測 3-2 カラーフロー映像系(CFI)の流速推定アルゴリズム 3-3 CFI の流速推定アルゴリズムによるせん断波波面検出 3-4 定量的なせん断波画像の構成法 3-5 波数ベクトルフィルタリング 第4章 提案手法の実験系と特徴 23 4-1 実験系の構成 4-2 提案法の特徴と従来法との比較 第5章 ファントム実験 26 5-1 寒天ファントムを用いた映像化実験 5-2 乳腺ファントムを用いた評価と音響放射圧法(ARFI 法)との比較 5-3 硬い構造物を埋め込んだファントムでの評価 第6章 提案手法の乳がんへの適用 40 6-1 乳癌への適用結果と正常乳腺との比較 6-2 乳癌におけるせん断波の減衰 第7章 せん断波の振幅を考慮した解析 50 7-1 解析方法 7-2 正常乳腺と乳癌の比較 7-3 せん断波伝搬速度・伝搬方向の評価
2 第8章 結論 62 8-1 結論 8-2 今後の課題 謝辞・参考文献 64 付録 66
3
第1章 序論
平成 29 年における日本の死因別死亡数第一位は悪性新生物(がん)であり,全死亡者のお よそ 3.5 人に 1 人が悪性新生物により死亡している(厚生労働省「平成 29 年人口動態統計 月報年計(概数)の概要」より).悪性新生物による死亡率は近年特に増加傾向にある.その原 因として考えられるものに人口構成の高齢化、食の欧米化などに加え検診の受診率の低さ があげられる.がんを治療するためには早期発見が重要であり、より安価で簡便な新しい診 断方法が求められている.がんを部位別に見ると,厚生労働省全国癌罹患数 2016 年速報より, 女性では乳がんの罹患率が第一位であり,日本人女性のおよそ 11 人に 1 人が生涯で乳がん を発症している状況にある.現在,乳がんの診断には,視触診,マンモグラフィ,超音波など が用いられている.しかしこれらには問題点がある.例えば,視触診では深いところにある 病変や小さな病変は発見しにくく,マンモグラフィでは X 線を用いるため被ばくに関する安 全面の懸念や,さらに乳腺が密な若年者の場合病変を発見しにくい.その点超音波は視触診 よりも深いところまで診断でき,体への負担は軽く,乳腺密度に左右されないため若年者に も適しているが,病変の形が主な判断材料のため医師又は技師の技量によって診断結果が 異なる可能性が大きい.特に,良性腫瘍と悪性腫瘍の判断が難しい.そのため,より安全で簡 便さらに定量的な診断法を確立するために様々な研究がなされている.なかでも,正常な組 織に比べがん組織が硬いという性質を利用した組織弾性計測が近年注目を集めている. 生体組織の様な比較的柔らかい物体の場合、その表面から周波数 1[kHz]程度までの低周 波振動を加えると,その放射エネルギーの大部分は生体中を横波として伝搬する.さらにそ の伝搬速度や減衰係数は,せん断粘弾性パラメータと関連があることが知られている.生体 組織のせん断粘弾性特性は,生体組織を触った時の硬さや感触と密接に関係しているため, 生体組織における低周波振動の伝搬速度や減衰などが測定できれば,組織の硬さの画像化 ができ,疾病の進行度の定量的な評価や早期発見が期待できる.しかし,生体組織の機械的 構造は非常に複雑なため,組織境界などでせん断波の反射や屈折が起こる.これが測定精度 に影響を与えてしまう場合があり,肝臓などの比較的一様な組織でしか伝搬速度を精度良 く測定できないという問題がある.そのため反射波をカットするシステムなど,非一様かつ 複雑な境界面を持つ組織においても精度よく組織内部の粘弾性を測定可能にする工夫が必 要である.さらに臨床においては,明瞭で信頼度の高い測定結果の画像化が求められている. そこで本研究では,体表近くの組織を測定対象とした新規のせん断波エラストグラフィ として実時間せん断波映像法(Color Doppler Shear Wave Imaging:CDSWI 法)を提案し,生体 模擬ファントムの測定実験や,悪性腫瘍である乳がんを対象とした臨床実験から得たデー タを用いてその評価を行った。4
第2章 せん断波計測について
本章ではせん断波の特徴と工学的な研究課題,生体軟組織内部における低周波振動の伝 搬について示す.さらに,せん断波計測により期待される臨床意義や目的について示す. 2-1 せん断波とは ここでは,せん断波の特徴とそこから考えられる工学的な課題について示す. せん断波の特徴 1. 波長 波長は数ミリメートルであるため,高分解能測定が求められている. 2. 振幅 振幅は数十ミクロン以下であり,高精度超音波計測技術が求められている. 3. 周波数 主にせん断波の減衰により制限され,現在利用できるのは 100[Hz]~数[kHz]である. 工学的な研究課題 1. せん断波の波動としての性質 伝搬方向が一様ではなく多重反射や回折,減衰の問題がある. 2. せん断波の励起方法 振幅を得ようとすると加振器のサイズが大きく重くなる.また,効率の問題もあり加振 器の発熱の問題がある. 3. パラメータ推定法,その物理,臨床的意味づけ5 2-2 生体内部の組織における低周波振動の伝搬 生体組織の粘弾性パラメータと低周波振動の伝搬速度および減衰の関係について以下に 示す. 外部から媒質に振動を加えると,その振動は一般的に縦波・横波として伝搬する.生体の 様な粘弾性媒質中では,Hooke の法則が成り立つ Voigt モデルと仮定することにより,組織 の粘弾性を推定する手法が提案[1]されている.この縦波,横波の伝搬速度および減衰係数 は次式で与えられる. ① 縦波 伝搬速度 :
𝑣
1=
𝜔
𝑣𝑅𝑒[𝑔]
(2-2-1) 減衰係数 :𝛼
1= −𝐼𝑚[𝑔]
(2-2-2) ただし,g = {
𝜌𝜔
𝑣 2(2𝜇 + 𝜆)
}
1 2 (2-2-3) ② 横波 伝搬速度 :𝑣
𝑡=
𝜔
𝑣𝑅𝑒[ℎ]
(2-2-4) 減衰係数 :𝛼
𝑡= −𝐼𝑚[ℎ]
(2-2-5)ただし,
h = {
𝜌𝜔
𝑣 2𝜇
}
1 2 (2-2-6)μ = 𝜇
1+ 𝑗𝜔
𝑣𝜇
2λ = 𝜆
1+ 𝑗𝜔
𝑣𝜆
2 𝜇1 :せん断弾性係数 𝜆1 :体積弾性係数 𝜇2 :せん断弾性係数 𝜆2 :体積弾性係数 𝜌 :密度 𝜔𝑣 :振動周波数 Re[ ], Im[ ] :[ ]内の複素数の実数部, 虚数部 また,これら縦波や横波の他に生体の表面付近では表面波が存在するが,この伝搬速度 はほぼ横波の伝搬速度に等しいことが知られている.上記の波動の中で,縦波は圧縮性 の波であり,媒質を圧縮することにより伝搬する.一方,横波は非圧縮性の波であり,媒 質を等体積のまま,横方向に挟み切るように変形させながら伝搬していくため,せん断 波とも呼ばれている.ここで,周波数が 1[kHz]程度以下の低周波振動であると,外部か ら与えられた振動のエネルギーはそのほとんどが横波に変換されると考えられている [2].6 ここで,(2-2-4)式,(2-2-5)式で与えられる横波の伝搬速度と減衰係数を,粘弾性パラメー タを用いて書くと,
𝑣
𝑡= √
2(𝜇
1 2+ 𝜔
𝑣2𝜇
22)
𝜌(𝜇
1+ √𝜇
12+ 𝜔
𝑣2𝜇
22)
(2-2-7)𝛼
𝑡= √
𝜌𝜔
𝑣2(𝜇
1+ √𝜇
12+ 𝜔
𝑣2𝜇
22)
2(𝜇
12+ 𝜔
𝑣2𝜇
22)
(2-2-8) となる. したがって,もし,媒質の弾性が粘性にまさり,𝜇1≫ 𝜔𝑣𝜇1の関係が成り立つときには,𝑣
𝑡1≅ √
𝜇
1𝜌
(2-2-9)𝛼
𝑡1≅ 0
(2-2-10) となり,伝搬速度は,単にせん断弾性係数と媒質の密度のみの関数となる.このとき,𝜇1が大 きいということは,媒質が硬いということであり,硬い媒質ほど伝搬速度は速くなる. 一方,媒質の粘性が弾性にまさり𝜇1≪ 𝜔𝑣𝜇1の関係が成り立つときには,𝑣
𝑡2≅ √
2𝜔
𝑣𝜇
2𝜌
(2-2-11)𝛼
𝑡2≅ √
𝜌𝜔
𝑣2𝜇
2 (2-2-12) となり,𝑣𝑡2・𝛼𝑡2とも粘性係数と密度の関数になり,この場合𝑣𝑡2・𝛼𝑡2の周波数依存性(分散 性)が現れてくる. Fig.2-2-1 に弾性体と粘弾性体の周波数別伝搬速度を示す.7 Fig.2-2-1 弾性体と粘弾性体の周波数別伝搬速度 2-3 せん断波計測で期待されるパラメータと臨床的有用性 せん断波の伝搬速度は,臨床的な有用性が明らかにされているが,せん断波計測によって 得られる情報としては,この他にも Fig.2-3-1 に示すような情報も得られると考えられる. 測定量 物理パラメータ 臨床意義 計測時の問題点 伝搬速度 せん断弾性係数 組織の硬さ 多重反射,減衰 減衰係数 粘性係数 粘性評価 多重反射,屈折, 反射 伝搬速度の 周波数依存性 粘性評価, 測定の定量性向上 多重反射,減衰, 空間分解能 共振現象 せん断弾性係数 組織のボリュームの 大きさ 減衰,空間分解能 非線形性 初期応力, 媒質の非線形性 組織非線形性評価 振動振幅の減衰 異方性 伝搬速度の方向性 繊維方向,繊維化 三次元伝搬方向 Fig.2-3-1 せん断弾性波によって得られる情報 0 1 2 3 4 5 6 100 200 300 400 500 600 700 800 900 1000 伝搬速度 [m /s ec ] 加振周波数[Hz] 弾性率2.26kPa, 粘性率2.38Pa・s 弾性のみの場 合(2.26kPa)
8
第3章 カラードップラせん断波映像法の原理
3-1 超音波パルスドプラ法による組織内振動伝搬計測 組織内振動伝搬計測は,組織表面から振動を印加することで組織内に振動を励起させ,内 部を伝搬する振動を超音波で計測するものである.これは,組織内部を多数の超音波散乱体 と考えると,組織内部に超音波を送波し,超音波散乱体から反射してくる超音波がドップラ ー効果によって周波数変調を受けていることに着目したものである.したがって,超音波散 乱体から反射した超音波を直交検波することで得られるドップラー信号から組織内部を伝 搬する振動を推定することができる. 今,Fig.3-1-1 に示すように,超音波トランスデューサに近づく方向に周波数𝑓𝑏,速度𝑣(𝑡) で振動する超音波散乱体に対して,超音波トランスデューサから中心周波数𝑓0の超音波パル スを送波する場合を考える. Fig.3-1-1 計測モデル 散乱体の運動ξ(𝑡)は次式で表すことができる.ξ(𝑡) = 𝜉
0𝑠𝑖𝑛(2π𝑓
𝑏𝑡 + 𝜙
𝑏)
(3-1-1) ただし, 𝜉0 :振動振幅𝜙
𝑏:初期位相 この時,超音波散乱体に反射した超音波の周波数 𝑓 は𝑓 =
𝑐 + 𝑣(𝑡)
𝑐
𝑓
0 (3-1-2) 𝑐 :音速 ’9 この反射波が超音波トランスデューサで受信されるときの周波数𝑓′は
𝑓
′=
𝑐
𝑐 − 𝑣(𝑡)
𝑓
(3-1-3) (3-1-2)式,(3-1-3)式より𝑓
′=
𝑐
𝑐 − 𝑣(𝑡)
×
𝑐 + 𝑣(𝑡)
𝑐
𝑓
0=
𝑐 + 𝑣(𝑡)
𝑐 − 𝑣(𝑡)
𝑓
0 (3-1-4) したがって,超音波のドプラ周波数シフト∆𝑓は∆𝑓 = 𝑓
′− 𝑓
0=
𝑐 + 𝑣(𝑡)
𝑐 − 𝑣(𝑡)
𝑓
0− 𝑓
0=
2𝑣(𝑡)
𝑐 − 𝑣(𝑡)
𝑓
0 (3-1-5) となる. 超音波ドプラ法で組織内の速度を観測する場合,組織内での音速は約 1500[m/sec]であ り,それと比較して観測しようとする組織内の速度は 1~10 数[m/sec]と微小であるので, c ≫ v(𝑡)となり,(3-1-5)式は次式のように近似することができる.∆𝑓 ≅
2𝑣(𝑡)
𝑐
𝑓
0 (3-1-6) この時,超音波の位相変化∆𝜙は∆𝜙 = 2π ∫(∆𝑓)𝑑𝑡
=
4𝜋𝑓0 𝑐∫ 𝑣(𝑡)𝑑𝑡
=
4𝜋𝑓
0𝑐
𝜉(𝑡)
(3-1-7)
となるので,この散乱体からの受信信号𝑟(𝑡)は𝑟(𝑡) = 𝐴(𝑡)𝑠𝑖𝑛(2π𝑓
0𝑡 + ∆𝜙 − 2𝑘
𝑢𝑍)
= 𝐴(𝑡)𝑠𝑖𝑛 (2π𝑓
0𝑡 +
4𝜋𝑓
0𝑐
𝜉(𝑡) − 2𝑘
𝑢𝑍)
= 𝐴(𝑡)𝑠𝑖𝑛 {2π𝑓
0(𝑡 + 2
𝜉(𝑡)
𝑐
) − 2𝑘
𝑢𝑍}
(3-1-8)10 ただし, 𝐴(𝑡):振幅 𝑘𝑢 :超音波パルスの波数 𝑍 :トランスデューサ,散乱体間の距離 となる.よって超音波パルス間で微小変位𝜉(∆𝑡)による位相ずれが生じる. 次に RF 信号に,位相が互いに 90 度異なる超音波周波数成分を畳み込み積分し低域通 過フィルターをかけ,QI 信号を得る. (ⅰ) I 信号 RF 信号にキャリア信号を乗算すると
𝐼
′(𝑡) = 𝐴(𝑡)𝑠𝑖𝑛 {2π𝑓
0(𝑡 + 2
𝜉(𝑡) 𝑐) − 2𝑘
𝑢𝑍} 𝑠𝑖𝑛(2π𝑓
0)
=
𝐴(𝑡) 2{𝑐𝑜𝑠 (4π𝑓
0𝑡 +
4π𝑓0𝜉(𝑡) 𝑐− 2𝑘
𝑢𝑍) − 𝑐𝑜𝑠 (
4π𝑓0𝜉(𝑡) 𝑐− 2𝑘
𝑢𝑍)}
(3-1-9)
となる.ここで 2ω0付近の信号を低域通過フィルターで除くと,𝐼(𝑡) =
𝐴(𝑡)
2
𝑐𝑜𝑠 (
4π𝑓
0𝜉(𝑡)
𝑐
− 2𝑘
𝑢𝑍)
(3-1-10) となり I 信号を得る. (ⅱ) Q信号 (ⅰ)と 90 度異なるキャリア信号を乗算すると𝑄
′(𝑡) = 𝐴(𝑡)𝑠𝑖𝑛 {2π𝑓
0(𝑡 + 2
𝜉(𝑡)
𝑐
) − 2𝑘
𝑢𝑍} 𝑐𝑜𝑠(2π𝑓
0)
=
𝐴(𝑡) 2{𝑠𝑖𝑛 (4π𝑓
0𝑡 +
4π𝑓0𝜉(𝑡) 𝑐− 2𝑘
𝑢𝑍) − 𝑠𝑖𝑛 (
4π𝑓0𝜉(𝑡) 𝑐− 2𝑘
𝑢𝑍)}
(3-1-11) となる.(ⅰ)と同様に低域通過フィルターを用いると𝑄(𝑡) =
𝐴(𝑡)
2
𝑠𝑖𝑛 (
4π𝑓
0𝜉(𝑡)
𝑐
− 2𝑘
𝑢𝑍)
(3-1-12) となり,Q 信号を得る.11 3-2 カラーフロー映像系(CFI)の流速推定アルゴリズム いま,超音波パルスを同一方向に N パルス送波すると,i 番目の超音波パルスに対する受 信超音波の位相𝜙𝑖は,
𝜙
𝑖= 𝜙
0+
2𝜋𝑓0 𝑐2𝑣 𝑖 Δ𝑡
(3-2-1) ここで 𝜙0: 初期位相 𝑓0: 超音波の中心周波数 𝑐: 音速 𝑣: 流速 Δ𝑡: 超音波パルス間の時間間隔 (3-2-1)式より,i 番目の受信 RF 信号𝑟𝑖は,𝑟
𝑖= 𝑟
0sin (2𝜋 𝑓
0𝑡 + 𝜙
𝑖)
= 𝑟
0sin (2𝜋 𝑓
0𝑡 + 𝜙
0+
2𝜋𝑓
0𝑐
2𝑣 𝑖 Δ𝑡)
(3-2-2) この受信 RF 信号を直交検波器で直交検波すると,その複素直交検波出力𝑄⃗ 𝑖,および𝑄⃗ 𝑖の実 部信号および虚部信号である In phase 信号𝐼𝑖と,Quadrature 信号𝑄𝑖は,Q
⃗⃗
𝑖= 𝐼
𝑖+ 𝑗𝑄
𝑖𝐼
𝑖= 𝑎 cos (𝜙
0+
2𝜋𝑓
0𝑐
2𝑣 𝑖 Δ𝑡)
𝑄
𝑖= 𝑎 sin (𝜙
0+
2𝜋𝑓
0𝑐
2𝑣 𝑖 Δ𝑡)
(3-2-3) (3-2-3)式は,(3-2-4)式のように書くこともできる.Q
⃗⃗
𝑖= 𝑎 𝑒𝑥𝑝( 𝑗(𝜙
0+
2𝜋𝑓
0𝑐
2𝑣 𝑖 Δ𝑡))
(3-2-4) ここで,第 i 番目の超音波パルスの位相と,第 i+1 番目の超音波パルスの位相の差Δ𝜙𝑖を考 える.これは,Δ𝜙
𝑖= 𝑎𝑟𝑔 (Q
⃗⃗
𝑖+1Q
⃗⃗
𝑖 ∗)
(3-2-5) と推定できるので,(3-2-4)式を代入すると,12
Δ𝜙
𝑖= 𝑎𝑟𝑔 ( 𝑎
2𝑒𝑥𝑝( 𝑗
2𝜋𝑓
0𝑐
2𝑣 Δ𝑡))
=
2𝜋𝑓
0𝑐
2𝑣 Δ𝑡
(3-2-6) よって流速𝑣は,次式で求められる.𝑣 =
𝑐
2𝜋𝑓
0∙ 2Δ𝑡
Δ𝜙
𝑖=
𝑐
2𝜋𝑓
0∙ 2Δ𝑡
𝑎𝑟𝑔 (Q
⃗⃗
𝑖+1Q
⃗⃗
𝑖 ∗)
(3-2-7) (3-2-7)式のカッコ内は,IQ 信号を使うと,Q
⃗⃗
𝑖+1Q
⃗⃗
𝑖∗= (𝐼
𝑖+1+ 𝑗𝑄
𝑖+1) (𝐼
𝑖+ 𝑗𝑄
𝑖)
∗= (𝐼
𝑖+1+ 𝑗𝑄
𝑖+1) (𝐼
𝑖− 𝑗𝑄
𝑖)
= 𝐼
𝑖+1𝐼
𝑖+ 𝑄
𝑖+1𝑄
𝑖+ 𝑗(𝐼
𝑖𝑄
𝑖+1− 𝐼
𝑖+1𝑄
𝑖)
(3-2-8) と書けることより,流速の推定式として𝑣 =
𝑐
2𝜋𝑓
0∙ 2Δ𝑡
𝑎𝑟𝑐𝑡𝑎𝑛 (
𝐼
𝑖𝑄
𝑖+1− 𝐼
𝑖+1𝑄
𝑖𝐼
𝑖+1𝐼
𝑖+ 𝑄
𝑖+1𝑄
𝑖)
(3-2-9) CFI では,S/N を向上させるために,連続した超音波 N パルスから得た直交検波出力信号 を用いて以下の式で流速を推定している.𝑣 =
𝑐
2𝜋𝑓
0∙ 2Δ𝑡
𝑎𝑟𝑐𝑡𝑎𝑛 (
𝐸
𝑈𝐸
𝐿)
𝐸𝑈= ∑ 𝐼𝑖𝑄𝑖+1− 𝐼𝑖+1𝑄𝑖 𝑁 𝑖=1 𝐸𝐿= ∑ 𝐼𝑖+1𝐼𝑖+ 𝑄𝑖+1𝑄𝑖 𝑁 𝑖=1 (3-2-10)13 3-3 CFI の流速推定アルゴリズムによるせん断波の波面検出 いま,CFI の流速推定アルゴリズムをせん断波により反射体が正弦的に振動している場 合に適用する. せん断波が伝搬して組織が正弦的に変動すると,組織変位𝜉は次式のように表すことがで きる.
𝜉 = 𝜉
0sin (𝜔
𝑏𝑡 + 𝜙
0)
(3-3-1) 𝜔𝑏 : 振動角周波数 𝜙0 : 初期位相 このとき,i 番目の受信超音波パルスの位相𝜙𝑖は,𝜙
𝑖= 𝜙
0+
2𝜋𝑓
0𝑐
2𝜉
(3-3-2) 直交検波器の出力は,(3-2-3)式と同様に𝐼
𝑖= 𝑎 cos (𝜙
0+
2𝜋𝑓
0𝑐
2𝜉)
𝑄
𝑖= 𝑎 sin (𝜙
0+
2𝜋𝑓
0𝑐
2𝜉)
(3-3-3) となる. ここでせん断波の角周波数に対して,下記の条件(周波数条件)が成り立つ場合を考える.𝜔
𝑏=
2𝜋
4Δ𝑡
(3-3-4) つまり,せん断波の周波数であらわすと,𝑓
𝑏=
1
4Δ𝑡
(3-3-5) さらに,振動の初期位相として𝜙
0= 0
(3-3-6) が満たされるとする.14 上記条件((3-3-5)式および(3-3-6)式)は,せん断波の伝搬による組織の変位振動の周期が 超音波の4パルスに等しく,かつ初期位相が 0 の条件であり,これを変位振幅として図に 表すと Fig.3-3-1 にようになる. Fig.3-3-1 仮定した変位振幅 Fig.3-3-1 と同じ振動振幅は,せん断波の振動周波数が高く,エイリアジングにより低い周 波数に折り返す場合にも生じるが,この時の振動周波数は,mを整数として,
𝑓
𝑏=
1
2
(𝑚 +
1
2
)
1
Δ𝑡
(3-3-7) として表される.このため,以下の議論は,(3-3-7)式が成り立つ場合にも成立するので, せん断波の周波数として(3-3-7)式が成り立てばよい(CFI でせん断波を映像化するときの 周波数条件). この時,変位𝜉は𝜉 = 𝜉
0sin (2𝜋 𝑓
𝑏𝑖 Δ𝑡)
(3-3-8) と表される.この時,直交検波器の出力信号である I,Q 信号は,𝐼
𝑖= 𝑎 cos (
4𝜋𝑓
0𝑐
𝜉)
𝑄
𝑖= 𝑎 sin (
4𝜋𝑓
0𝑐
𝜉)
(3-3-9) となる. ここで,i=0,1,2,3 について,直交検波器の出力を求めてみると,𝛥𝑡
2𝛥𝑡
𝜉
3𝛥𝑡
4𝛥𝑡
0
𝑡
15 i = 0の場合
{
𝐼
𝑖= 𝑎
𝑄
𝑖= 0
(3-3-10) i = 1の場合𝐼
𝑖= 𝑎 cos (
4𝜋𝑓
0𝑐
𝜉
0)
(3-3-11) ただしλを超音波の波長とすると, ①0 ≤ 𝜉
0≤
𝜆 8の場合 {
𝐼
𝑖≥ 0
𝑄
𝑖≥ 0
② 𝜆 8≤ 𝜉
0≤
3𝜆 8の場合 {
𝐼
𝑖≤ 0
𝑄
𝑖≥ 0
(3-3-12) i = 2の場合{
𝐼
𝑖= 𝑎
𝑄
𝑖= 0
(3-3-13) i = 3 の場合𝐼
𝑖= 𝑎 cos (
4𝜋𝑓
0𝑐
𝜉
0)
(3-3-14) ただし, ①0 ≤ 𝜉
0≤
𝜆 8の場合 {
𝐼
𝑖≥ 0
𝑄
𝑖≤ 0
② 𝜆 8≤ 𝜉
0≤
3𝜆 8の場合 {
𝐼
𝑖≤ 0
𝑄
𝑖≤ 0
(3-3-15) となる.16 (3-3-11)-(3-3-15)式の関係をベクトル図であらわすと ① 0 ≤ 𝜉0≤𝜆8 の場合 Fig.3-3-2 に示すように,すべてのベクトルは第一象限と第四象限にある. Fig.3-3-2 𝟎 ≤ 𝝃𝟎≤ 𝝀 𝟖 での直交検波器の出力信号 ② 𝜆 8 ≤ 𝜉0≤ 3𝜆 8 の場合 i=1 とi=3 の時のベクトルは第二象限と第三象限にある. Fig.3-3-3 𝝀 𝟖 ≤ 𝝃𝟎≤ 𝟑𝝀 𝟖 での直交検波器の出力信号 これらを Tab.3-3-1 にまとめる.
17 Tab.3-3-1 直交検波器の出力信号 𝑖 𝐼𝑖 𝑄𝑖 0 𝑎 0 1 𝐼𝑎 * 𝑄𝑎 (正) 2 𝑎 0 3 𝐼𝑎 * −𝑄𝑎 (負) * 0 ≤ 𝜉0≤ 𝜆 8 のとき𝐼𝑎≥ 0, 𝜆 8 ≤ 𝜉0≤ 3𝜆 8 のとき𝐼𝑎 ≤ 0 次に,この IQ 信号のパターンに対して,CFI による速度推定値を求めてみる.まず, (3-2-10)式で示される,流速導出アルゴリズムは次の 2 つの基本演算からなる.
18 Fig.3-3-4 流速導出の基本演算 ここで超音波パルスの送受信数 N=11 の場合に,CFI による流速導出アルゴリズムを図式 化すると Fig.3-3-5 CFI における流速導出アルゴリズム
19 (3-3-4),(3-3-6)式の 2 つの条件がともに満たされているとき,CFI における流速推定は Fig.3-3-6 のようになる. Fig.3-3-6 CFI における流速導出アルゴリズムを使ったせん断波の波面再生 ここで, {0 ≤ 𝜉0≤ 𝜆 8 のとき 𝐸𝐿≥ 0 𝜆 8 ≤ 𝜉0≤ 3𝜆 8 のとき 𝐸𝐿 ≤ 0 となるが,ともに EU=0 であるので,実軸を EL,虚軸を EUとするベクトルは,ELが正の場 合は実軸上の正の方向を向くベクトルとなり,流速推定値は 0 になる.一方,ELが負の場 合は実軸上の負の方向を向くベクトルとなり,流速推定値は正の最大値,または負の最大値 (ナイキスト周波数で決まる最大の流速値)になる. つまり, ① ELが正になる条件(せん断波による振動振幅が0 ≤ 𝜉0≤𝜆 8 の場合) 流速 0 になる. ② ELが負になる条件(せん断波による振動振幅が𝜆 8 ≤ 𝜉0≤ 3𝜆 8の場合) 振動振幅の位相が0 度,および 180 度になる位置で CFI 画像には流速最大の部分が 現れる. この条件は,せん断波の振幅により,せん断波による振動位相が 0 または 180 度の時 に,特異なパターンがCFI 画像に現れることを示しており,これを振幅条件と呼ぶ.
20 せん断波が組織中を伝搬しているとき,CFI 画像の中から上記に示したような特徴ある 部分を抽出することにより,せん断波の位相(0 度または 180 度)が推定できることにな る.せん断波が等位相になる部分はせん断波の波面を再現することに相当するので,この方 法により,CFI 画像からせん断波の波面を再現できることになる. この方法は,周波数条件(3-3-7 式)が成り立つときに,CFI の推定アルゴリズムが,せ ん断波の 0 度と 180 度の位相を検出するディジタルフィルターになっていることに着目し た,せん断波の映像化法である.横軸を初期位相𝜙𝑏,縦軸を振動振幅𝜉0として,以下の条件 で,流速推定の数値シミュレーションをおこなった結果を Fig.3-3-7 に示す. [シミュレーション条件] 超音波中心周波数 𝑓0 6.5𝑀𝐻𝑧 超音波伝搬速度 𝑐 1500 𝑚 𝑠⁄ パルス繰り返し周波数 1 𝑑𝑡⁄ 365𝐻𝑧 パルス本数 𝑁 11 加振周波数 𝑓𝑏 91.25𝐻𝑧 Fig.3-3-7 数値シミュレーション結果 周波数条件は,理論的には(3-3-7)式であらわされるが,実際には,せん断波の周波数 がこの条件に近いときでも,流速の最大値または流速 0 の部分が CFI 画像上に現れる.そ のため,せん断波の周波数が周波数条件に近いときにも,せん断波の波面が再現できる. 𝜙𝑏
21 3-4 定量的なせん断波画像の構成法 周波数条件が成立する時,せん断波の位相 0 度および 180 度付近の 2 か所で流速推定値 𝐹𝑉𝑀が最大値または 0 の値を示す.そのため,カラードプラ像のフレームレートによって 見えるせん断波の偽りの角周波数を𝜔𝑎𝑙𝑖𝑎𝑠とすると,𝐹𝑉𝑀は角周波数𝜔𝑝 = 2𝜔𝑎𝑙𝑖𝑎𝑠の矩形波 となる.ここで,この矩形波の基本波のスペクトラム成分は,フーリエ変換を用いて
𝐹
𝐹𝑉𝑀(𝑥, 𝑧, 𝜔
𝑝) = ∫
𝐹𝑉𝑀(𝑥, 𝑧, 𝑡)
𝑇𝐶𝐹𝐼 0𝑒𝑥𝑝(𝑗𝜔
𝑝𝑡)𝑑𝑡
(3-4-1) と表せる.また,その位相スペクトラム成分𝜃𝐹𝑉𝑀(𝑥, 𝑧)は,𝜃
𝐹𝑉𝑀(𝑥, 𝑧) = 𝑎𝑟𝑔 (𝐹
𝐹𝑉𝑀(𝑥, 𝑧, 𝜔
𝑝))
(3-4-2) zx 平面を伝搬する平面波の波数の x 成分𝑘𝑥と z 成分𝑘𝑧とすると,CFI で観測される波面の 位相は,せん断波の位相𝜙の二倍変化するため,𝑥方向の単位長さあたりの超音波照射時間 遅れ∆𝑇𝑝を考慮すると,𝑘
𝑥(𝑥, 𝑧) =
1
2
𝜕 𝜃
𝐹𝑉𝑀(𝑥, 𝑧)
𝜕𝑥
+ 𝜔
𝑏∆𝑇
𝑝 (3-4-3)𝑘
𝑧(𝑥, 𝑧) =
1
2
𝜕 𝜃
𝐹𝑉𝑀(𝑥, 𝑧)
𝜕𝑧
(3-4-4) また,|𝑘⃗ |は次式で表される.|𝑘
⃗ | = √𝑘
𝑥2+ 𝑘
𝑧2=
2𝜋
𝜆
=
2𝜋
𝑣
𝑏𝑓
𝑏 (3-4-5) よって,せん断波の伝搬速度𝑣𝑏は 𝑣𝑏(𝑥, 𝑧) = 2𝜋𝑓𝑏 √𝑘𝑥2+ 𝑘𝑧2 = 2𝜋𝑓𝑏 √(1 2 𝑑 𝜃𝐹𝑉𝑀(𝑥, 𝑧) 𝑑𝑥 + 𝜔𝑏∆𝑇𝑝)2+ ( 1 2 𝑑𝜃𝐹𝑉𝑀(𝑥, 𝑧) 𝑑𝑧 )2 (3-4-6)22 3-5 波数ベクトルフィルタリング 反射波により定在波が発生すると,せん断波の位相は空間的に変調されてしまう.せん断 波の複素振幅マップを二次元フーリエ変換して空間周波数上のスペクトラムを計算し,波 数ベクトルフィルタを適用してフーリエ変換をすることで任意の成分を抽出することがで きる.この方法を CDSWI 法で取得したせん断波位相マップに適用することを考える. 前方へ伝搬する入射波と,後方へ伝搬する反射波が観測された一次元について考えると, せん断波の複素振幅 S(x)は, S(x) = 𝐴𝐹exp[𝑗(𝑘𝑝𝑥 + 𝜑𝐹)] + 𝐴𝐵exp [𝑗(−𝑘𝑝𝑥 + 𝜑𝐵)] (3-5-1) ただし,𝐴𝐹:入射波の振幅,𝐴𝐵:反射波の振幅,𝜑𝐹:入射波の初期位相,𝑘𝑝:せん断波の波 数,𝜑𝐵:反射波の初期位相である.𝐴𝐵≪ 𝐴𝐹のとき,入射波とS(x)との最大の位相差∆θは, ∆θ = arctan (𝐴𝐵 𝐴𝐹 ) (3-5-2) したがって,CFI から得られる複素信号𝑆𝐶𝐹𝐼(𝑥)は振幅情報が失われるので,𝜑𝐹,𝜑𝐵を無視す ると, 𝑆𝐶𝐹𝐼(𝑥) = exp[𝑗𝑎𝑟𝑔(𝑆(𝑥))] = exp[𝑗{𝑘𝑝𝑥 + ∆𝜃𝑠𝑖𝑛(−2𝑘𝑝𝑥)}] (3-5-3) 上式について,フーリエ級数展開をすると, 𝑆𝐶𝐹𝐼(𝑥) = ∑ 𝐽𝑛(∆𝜃)𝑒𝑥𝑝(𝑗𝑘𝑝𝑥)exp [−2𝑗𝑛𝑘𝑝𝑥] ∞ 𝑛=−∞ (3-5-4) ここで,𝐽𝑛(𝑥):n 次のベッセル関数である. 𝑘𝑝周りのスペクトラム成分のみを抽出するフィルタを適用することで,入射波のせん断波 位相マップ𝜃𝐹𝑃𝑊は以下の様に導出される. 𝑆𝐶𝐹𝐼′(𝑥) = 𝐽0(∆𝜃)exp (𝑗𝑘𝑝𝑥) (3-5-5) 𝜃𝐹𝑃𝑊(𝑥) = arg (𝑆𝐶𝐹𝐼′(𝑥)) (3-5-6)
23
第4章 提案手法の実験系と特徴
4-1 実験系の構成
第 3 章で示した周波数条件と振幅条件を満たす連続的な振動を加振器により加える.ただ し加振器は,市販の電動歯ブラシ(Panasonic doltz EW-DL22)を制御回路で改造したものを 使用した.励起させる振動は,1[kHz]程度以下の連続的な正弦波信号である.これによって せん断波を媒質内部に伝搬させ,超音波映像装置のカラーフローイメージングのアルゴリ ズムを利用してせん断波の可視化を行う.このとき,超音波プローブはせん断波の伝搬方向 と平行になるようにあてる必要がある.せん断波の伝搬により超音波カラーフロー画像を 取得するが,この画像上には第 3 章で示した特定条件下でせん断波伝搬に起因した波面パタ ーンが見られる.この画像を PC 内に画像インターフェースを介して実時間で取り込み,画像 処理によってせん断波波面を再現し各種マップを得ることができる. また,本研究に用いた超音波映像装置は日立メディコ社の「EUB-8500」,Siemens 社の「ACUSON S3000」である.実験系を Fig.4-1-1 に示す. Fig.4-1-1 実験系 実験に使用した加振器は入力電圧を正弦波駆動に改造したリニア振動アクチュエータ (Fig. 4-1-2)であり,使用した最大振幅は 1300[μm]程度である.
24 Fig. 4-1-2 電動歯ブラシ内リニアアクチュエータ また,加振器のヘッド部分には,せん断波の伝搬を球面波ではなく平面波に近づけるため にアクリル製の半円柱側面状のものを(Fig. 4-1-3)使用した. Fig. 4-1-3 加振器とそのヘッドの形状 加振器の制御回路は Fig 4-1-4 を使用し、これは発振器一体型のドライバである. Fig 4-1-4 発振器一体型の加振器用ドライバ
25 4-2 提案法の特徴と従来法との比較 現在,超音波を用いた硬さ計測の手法としていくつか実用化されているが,その特徴と問 題点は以下の通りである. 1) ストレイン法 プローブの押し下げによって生じるひずみを測定する方法.簡便で実時間性に優れるが 定量性に劣り,検査者の手技による影響が大きい. 2) トランジェント法 低周波振動加振により発生するせん断波を用いる方法.映像化技術ではない. 3) 音響放射圧法(ARFI 法) 高音圧のパルス超音波で生体内部にせん断波を励起させ,伝搬速度を計測する方法.高 フレームレートの高価なエコー装置が必要で汎用性に劣り,測定ごとにクリーニング時 間が必要である. 一方,提案手法の特徴として以下の様なものが挙げられる. 1) 汎用性に優れる. 既存の超音波カラードップラ装置(カラーフロー映像系 CFI)の流速検出アルゴリズムを せん断波の波面検出に使用する.また,超音波映像装置と加振器を機械的に同期させる 必要はなく,第 3 章で述べた周波数条件と振幅条件を満たしていれば超音波映像装置の ビデオ出力を画像処理することで簡単に組織弾性映像系を構築することができる. 2) 実時間で測定が可能である. せん断波映像を得るために必要な信号処理能力は一般の PC で十分であり,このため実 時間でせん断波の波面が組織中を伝搬していく様子が動画像で観測できる.このような 特徴は,スクリーニングを目的とした用途にも適している. 3) 高い安全性を有する. 従来の超音波映像装置を使うという点から生体に及ぼす危険性は低いと言える.また, 連続的なせん断波(周波数 1[kHz]程度以下の生体表面からの振動の印加で生体組織中に 励起される)を使用しているため,超音波の放射圧を使う方法(Siemens 社 Virtual Touch 等)と比べても高い安全性がある. 4) 提案法の問題点とその改善方法 連続的なせん断波を用いるため,反射波により定在波が発生してしまうと速度推定に誤 差が生じてしまう.しかし,波数ベクトルによる反射波の除去や,実時間での波面観測に よる加振点の選定により改善が可能である.
26
第5章 ファントム実験
5-1 寒天ファントムを用いた映像化実験 生体模擬ファントムとして,寒天濃度が 0.9w%の一様寒天ファントムを用いて CDSWI 法の 映像化実験を行った.実験条件は下記に示す通りである. [実験条件] 超音波映像装置・・・日立メディコ社製「EUB-8500」 超音波中心周波数・・・6.5[MHz] 加振周波数・・・276.5[Hz] [実験方法] ① 寒天ファントムの測定をしたい位置に超音波映像装置のプローブをあてた.ただし,こ の時プローブを押しつけすぎるとプレコンプレッションによりファントムの硬さが変 わってしまうため,極力ファントムへ圧力がかからないように,プローブと寒天の間に ゲルを十分に挟み,固定器具でプローブを固定した. ② せん断波の伝搬方向が超音波映像装置のプローブの長軸と平行になるように加振器の ヘッドをファントム表面にあて,せん断波を内部に励起させた. ③ 超音波映像装置の CFI モードにより,せん断波を寒天ファントムに励起させたときの カラーフロー画像を取得した.これに画像処理を施すことにより,せん断波の伝搬を表 わす位相マップ,波面マップ,伝搬速度マップ,伝搬方向マップ,振幅マップを取得し た. Fig. 5-1-1 は実験の様子である.27 Fig.5-1-1 実験系の様子 寒天ファントム実験により超音波映像装置から直接得られた B モード画像とカラーフロ ー画像を Fig. 5-1-2 に示す. Fig. 5-1-2 (左)B モード画像(右)カラーフロー画像 さらに,カラーフロー画像をもとに画像処理を施して得たせん断波の位相マップ,波面マ ップ,伝搬速度マップ,伝搬方向マップ,振幅マップを Fig. 5-1-3 に示す.
28
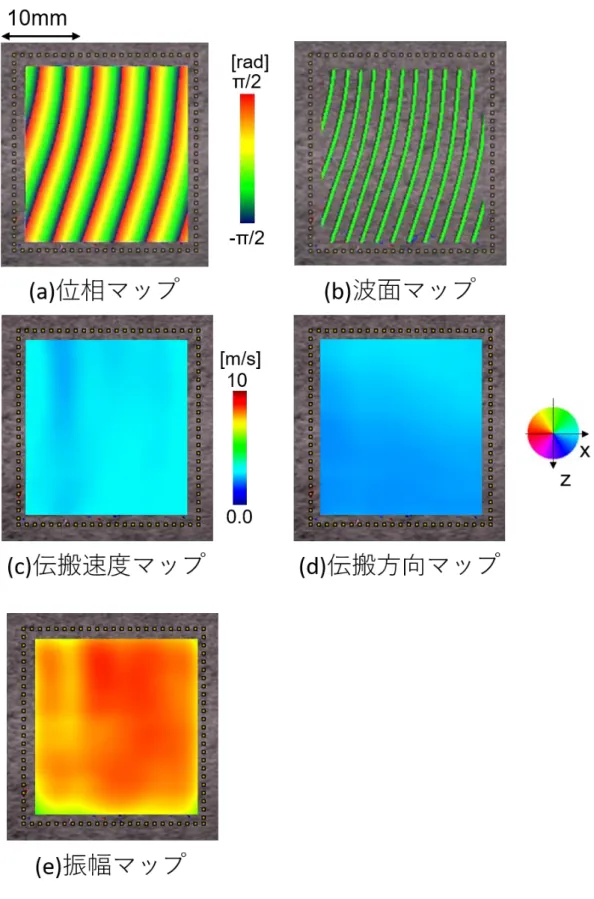
Fig. 5-1-3 (a)位相マップ,(b)波面マップ,(c)伝搬速度マップ (d)伝搬方向マップ,(e)振幅マップ
29
位相マップはせん断波の波数から位相を計算し、各位相ごとに色付けを行い、波面マッ プは 180°ごとの等位相部分を表示することによってせん断波の伝搬の様子を実時間で可 視化している。また、CDSWI 法による伝搬速度の測定の結果、0.9w%寒天では ROI 内の平均 伝搬速度と標準偏差が,2.77±0.14[m/s]という結果が得られた。
30 5-2 乳腺ファントムを用いた評価と音響放射圧法(ARFI 法)との比較 乳腺の模擬ファントムを用いてせん断波の映像化及び伝搬速度計測の実験を行った. 使用した乳腺ファントムは OST 社の BB-04 であり,上側表面から脂肪,乳腺,大胸筋を模擬し た層が重なっている.さらに乳腺を模擬した層の内部に腫瘤を模擬した軟組織,硬組織,シ ストが埋め込まれており,今回の実験では硬組織とその周囲を測定対象とした. 実験条件及び実験方法は以下の通りである. [実験条件] 超音波映像装置・・・Siemens 社製「ACUSON 3000」 超音波中心周波数・・・B モード画像 15[MHz] CFI 画像 7.5[MHz] 超音波プローブ・・・Siemens 社製 ACUSON 18L6HD 加振周波数・・・235.3[Hz] ファントム内部硬組織直径・・・7[mm] [実験方法] ① ファントムの測定をしたい部分(硬組織が埋め込まれている部分)に超音波映像装置の プローブをあてた.ただし,この時プローブを押しつけすぎるとプレコンプレッション によりファントムの硬さが変わってしまうため,極力ファントムへ圧力がかからない ようにプローブとファントム表面の間にゲルを十分に挟み,プローブを固定器具で固 定した. ② せん断波の伝搬方向が超音波映像装置のプローブの長軸と平行になるように加振器の ヘッドをファントム表面にあて,せん断波を内部に励起させた. ③ 超音波映像装置の CFI モードによりカラーフロー画像を取得し,これに画像処理を施 すことによってせん断波の伝搬を表わす波面マップ,伝搬速度マップを取得した. Fig. 5-2-1 は実験の様子である.
31
Fig.5-2-1 実験系の様子
このファントム実験により, 超音波映像装置から得られた B モード画像とカラーフロー 画像を Fig. 5-2-2 に示す.
32 さらにこの画像をもとに画像処理を施して得たせん断波の波面マップ,伝搬速度マップ を Fig. 5-2-3 に示す. Fig. 5-2-3 (左)波面マップ,(右)伝搬速度マップ ただし, 腫瘍の境界で反射が起こり定在波の影響で振幅が弱くなっていると考えられる 領域は透過,又は黒く表示している. さらに,腫瘍模擬内部 3 点とその周囲左側 3 点で伝搬速度計測を行った結果,Fig.5-2-4 に示すように腫瘍内部とその周囲での有意差が認められた. Fig. 5-2-4 伝搬速度計測の結果 さらに,同様の方法を用いて音響放射圧法(ARFI 法)で測定を行い伝搬速度の比較を行っ た.ARFI 法の実験条件と, 伝搬速度の測定方法は次の通りである.
33 [ARFI 法実験条件] 超音波映像装置・・・Siemens 社製「ACUSON 3000」 超音波中心周波数・・・9.0[MHz] 超音波プローブ・・・Siemens 社製 ACUSON 9L4 [測定方法] ① 1mm 四方の正方形内部の平均伝搬速度値を 1 点とし,ファントムの腫瘍模擬部 3 点とそ の左側周囲 3 点,計 6 点の伝搬速度値を計測した. ② データの正確性を高めるために①の測定を 4 データ分取得した. ③ 腫瘍模擬部と周囲それぞれの伝搬速度の平均値と標準偏差を求め,有意差検定を行い さらに伝搬速度のばらつきを示す箱ひげ図を作成した. ARFI 法測定の様子を Fig. 5-2-5 に示す. Fig. 5-2-5 ARFI 法による測定の様子 また,伝搬速度計測の測定点の取り方を示した図が Fig 5-2-6 である.
34
Fig. 5-2-6 伝搬速度計測の測定点
伝搬速度計測の結果を比較したグラフが Fig.5-2-7 である.
Fig. 5-2-7 CDSWI 法と ARFI 法の伝搬速度比較結果
Fig. 5-2-7 の結果,腫瘍模擬部とその周囲間において CDSWI 法は ARFI 法と同程度,また はそれ以上の有意差が認められた.さらに CDSWI 法が ARFI 法に比べ伝搬速度が 20%程低い 値になっているが,これは測定対象の粘性が弾性に勝る場合,伝搬速度には周波数依存性が あり CDSWI 法の加振周波数は 235.3[Hz],ARFI 法の音響放射圧の周波数は 500[Hz]~1[kHz] 程度と異なるためである.
35 5-3 硬い構造物を埋め込んだファントムでの評価 乳癌を模擬したファントムとして,寒天濃度が 1.3w%の一様寒天の中に鶏の膝軟骨を埋め 込んだファントムを作成し CDSWI 法による映像化実験を行った. また,膝軟骨の硬度を TECLOCK 社のデュロメータ「タイプ OO」を用いて測定し,せん断弾 性率から伝搬速度を計算した.デュロメータの指示値とせん断弾性率の関係式[8],及びせ ん断弾性率と伝搬速度の関係式[9]は以下の通りである. (DH) = 8𝑎𝐻0𝐺 − 𝑃0 8𝑎𝐻0𝐺 + 𝑃100− 𝑃0 × 100 (5-3-1) (DH) :デュロメータの硬さの指示値 a :押針半径[mm] H0 :押針の突出長さ[mm] P0 :デュロメータの指示値が 0 の時のスプリング荷重値[g] P100 :デュロメータの指示値が 100 の時のスプリング荷重値[g] G :せん断弾性率[MPa][g/mm2] v = √𝐺 𝜌 (5-3-2) v :せん断波伝搬速度[m/s] G :せん断弾性率[kg/m2] ρ :密度[kg/m3] 但し,密度ρは 1000[kg/m3]として計算した. 同一測定対象に対して 3 回デュロメータで測定し,その平均値をデュロメータの指示値 とした.さらに,せん断弾性率と伝搬速度の計算結果を Fig.5-3-1 に示す.
36 デュロメータ指示値(DH) せん断弾性率 G[MPa] 伝搬速度 [m/s] 測定1 測定2 測定3 平均値 軟骨1 85 76 91 84.00 25.8 5.1 軟骨2 82 80 76 79.33 19.1 4.4 軟骨3 82 73 90 81.67 22.0 4.7 軟骨4 79 88 89 85.33 28.5 5.3 軟骨5 70 89 77 78.67 18.4 4.3 軟骨6 76 89 86 83.67 25.2 5.0 軟骨7 93 81 85 86.33 30.9 5.6 軟骨8 75 83 80 79.33 19.1 4.4 軟骨9 82 95 88 88.33 36.8 6.1 軟骨10 77 87 84 82.67 23.5 4.8 Fig.5-3-1 鶏の膝軟骨デュロメータでの測定値・せん断弾性率・伝搬速度 この結果から,鶏の膝軟骨の伝搬速度はおおよそ 4~6[m/s]であることが確認できた.
37 次に,鶏の膝軟骨を埋め込んだ寒天ファントムの実験条件および実験方法について以下 に示す. [実験条件] 超音波映像装置・・・日立メディコ社製「EUB-8500」 超音波中心周波数・・・6.5[MHz] 加振周波数・・・276.5[Hz] [実験方法] ① ファントムの測定をしたい位置に超音波映像装置のプローブをあてた.ただし,この時 プローブを押しつけすぎるとプレコンプレッションによりファントムの硬さが変わっ てしまうため,極力ファントムへ圧力がかからないようにプローブとファントムの間 にゲルを十分に挟み,プローブを固定器具で固定した. ② せん断波の伝搬方向が超音波映像装置のプローブの長軸と平行になるように加振器の ヘッドをファントム表面にあて,せん断波を内部に励起させた. ③ 超音波映像装置の CFI モードによりカラーフロー画像を取得し,これに画像処理を施 すことによってせん断波の伝搬を表わした波面マップ,伝搬速度マップ,伝搬方向マッ プ,振幅マップを取得した. Fig.5-3-2 に実験の様子を示す. Fig.5-3-2 鶏の膝軟骨を埋め込んだ寒天ファントムの測定実験の様子
38
実験の結果,観測された B モード画像とカラーフロー画像(CFI)を Fig.5-3-3 に示す.
Fig.5-3-3 (左)B モード画像,(右)カラーフロー画像
さらにカラーフロー画像から画像処理によって得られたせん断波の波面マップ,伝搬速 度マップ,伝搬方向マップ,振幅マップを Fig.5-3-4 に示す.
39 Fig.5-3-4 波面マップ(左上),伝搬速度マップ(右上), 伝搬方向マップ(左下),振幅マップ(右下) Fig.5-3-4 の伝搬速度図に示すように,B モード画像から軟骨と想定される位置について 1mm×1mm の小分割 ROI を用いて伝搬速度の解析を行った.その結果,5 つの小分割 ROI の平 均伝搬速度と標準偏差は,14.6±3.6[m/s]であり,先にデュロメータで計測した軟骨の伝搬 速度より速い値となった.また,軟骨の周囲に伝搬速度が遅い低速のリムが確認された.
40
第6章 提案手法の乳がんへの適用
6-1 乳癌への適用結果と正常乳腺との比較 悪性腫瘍のような硬い物質が含まれている場合,異なる構造間の反射や屈折などにより せん断波の伝搬は 3 次元的に複雑に変化する.そこで,悪性腫瘍の模擬として,伝搬速度が周 囲組織に対して 5 倍の球形組織を含んだ媒質(周囲伝搬速度 2m/s,球形媒質 10m/s 相当)で の,3 次元のせん断波伝搬のシミュレーションを行った.シミュレーションには,群馬大学三 輪空司准教授が作成した 3DFDTD を用いたプログラム(3DFDTD の計算については付録を参照) を使用した.Fig.6-1-1 にシミュレーションの条件を示す. Fig.6-1-1 (a)条件 1:観測面 xz 面,観測波 y 偏波 (b)条件 2:観測面 xy 面,観測波 z 偏波 1 における条件 1,条件 2 でのシミュレーション結果をそれぞれ Fig.6-1-2,Fig.6-1-3 に示す.41
42 Fig.6-1-3 条件 2(観測面 xy 面,観測波 z 偏波)におけるせん断波伝搬シミュレーション Fig6-1-2 条件 1 のシミュレーション結果より,球形の組織内部でせん断波の減衰が起こ っていること,また,周囲組織と球形組織の境界でせん断波の反射・屈折が起こり伝搬方向 が変化していることが確認された. さらに,Fig.6-1-3 条件 2 のシミュレーション結果より,球形組織の表面でせん断波が反 射することによって,y 軸方向への進む波の伝搬が顕著に現れることが確認された.
43 次に,提案手法を乳癌へ適用する実験を行った.本実験は倫理委員会承認のもと事前に被 験者の同意を得て医師が測定を行った.実験条件と実験方法については以下の通りである. [実験条件] 超音波映像装置・・・Siemens 社製 「ACUSON 3000」 超音波中心周波数・・・B モード画像 15[MHz] CFI 画像 7.5[MHz] 加振周波数・・・235.3[Hz]~236.8[Hz] 測定人数・・・15 人(硬癌,浸潤性乳管癌,DCIS,乳頭腺癌,小葉癌,粘液癌) [実験方法] ① 超音波プローブを測定部位にあてた. ② 加振器を生体表面にあて,せん断波を生体内に励起させた.このときせん断波の伝搬 方向が超音波プローブの長軸方向と一致するようにあてた. ③ 超音波映像装置からカラーフロー画像を取得し,PC 内で画像処理を施すことによっ てせん断波の波面マップ,伝搬速度マップ,伝搬方向マップ,振幅マップを得た. Fig. 6-1-4 測定を行った部屋の様子
44 また,実験に用いた加振器とそのドライバを Fig. 6-1-5 に示す. Fig. 6-1-5 測定に使用した(左)加振器(右)加振器用ドライバー 臨床実験で得られた乳癌の一例を以下に示す.Fig.6-1-6 は B モード画像とカラーフロー 画像である.また,このカラーフロー画像に画像処理を施し得られた波面マップ, 伝搬速度 マップ,伝搬方向マップ,振幅マップを Fig.6-1-7 に示す. (その他の臨床実験データは付 録を参照) Fig.6-1-6,Fig.6-1-7 は直径 9mm の浸潤性乳管癌の測定結果である. Fig. 6-1-6 (左)B モード画像(右)カラーフロー画像
45
Fig.6-1-7 (左上)波面マップ(右上)振幅マップ(左下) 伝搬速度マップ(右下)伝搬方向マップ
46
Fig.6-1-8 (a)乳癌の波面マップ(b)乳癌の振幅マップ(c)乳癌の伝搬速度マップ (d)乳癌の伝搬方向マップ(e)正常乳腺の波面マップ(f)正常乳腺の振幅マップ
47 但し,波面マップ,伝搬速度マップ,伝搬方向マップは振幅の値によって輝度に変化をつ けており,振幅の弱い領域は透過させている. このように,乳癌と正常乳腺についてせん断波の各種マップを得ることができた.正常乳 腺と比べると,乳癌ではより複雑にせん断波が伝搬していることが波面マップから分かる. また,腫瘍の周囲でせん断波の振幅が弱く低速のリムが現れるのは癌の画像における大 きな特徴である.さらに方向マップから,このように振幅が弱く伝搬速度が遅くなっている 領域では,伝搬方向の変化が大きいことが確認できた.これらの結果から,せん断波の伝搬 速度だけでなく,振幅や伝搬方向に含まれる情報も乳癌を判別する重要な指標であること が示唆された. 6-2 乳癌におけるせん断波の減衰 先述より,乳癌の周囲でせん断波の振幅が弱くなることが確認されたが,ここではせん断 波の振幅が弱くなる原因について述べる. Fig.6-2-1 は乳癌の一種である浸潤性乳管癌におけるせん断波の波面マップと振幅マッ プである. Fig.6-2-1 浸潤性乳管癌(左)波面マップ(右)振幅マップ
48 振幅マップより,悪性腫瘍の周囲でせん断波の振幅が弱くなっていることが分かる.さら に,振幅が弱くなっている位置の波面マップを見ると,せん断波の伝搬方向が複雑に変化し ている.このことから,悪性腫瘍と周囲組織の境界でせん断波の屈折や反射が起こり振幅が 弱くなっていると考えられる.このような反射や屈折による複雑な伝搬方向の変化は乳癌 特有の現象であるため,この伝搬方向のばらつきが悪性腫瘍を判別する一つの指標に成り 得ると考えられる. 次に,同じく乳癌の一種である硬癌におけるせん断波の波面マップと振幅マップを Fig.6-2-2 に示す. Fig.6-2-2 硬癌(左)波面マップ(右)振幅マップ 硬癌は他の癌よりも硬いという特徴が知られているため,せん断波が減衰し振幅が弱く なる.このように,硬癌のような硬い癌の場合,せん断波の振幅が癌を発見するために有効 な指標に成り得ることが分かる.硬癌は比較的従来のエコー診断により B モード画像から も発見しやすい癌であるが,せん断波の振幅を見ることによってより見落としを減らすこ とができると考えられる. 次に,Fig6-2-3 は脂肪化乳房のせん断波波面マップと振幅マップである.ただし,画像内 には浸潤性乳管癌の腫瘍も含まれる.
49 Fig.6-2-3 脂肪化乳房(左)波面マップ(右)振幅マップ このように,脂肪は粘性が高いため,脂肪化乳房や脂肪層が厚い場合にもせん断波が減衰 する.脂肪での減衰が大きいと,脂肪層の下にある乳腺でのせん断波の観測が不可能なた め,この点については改善する必要がある.せん断波の減衰はせん断波の周波数に依存する ため,低周波加振により脂肪層での減衰を低減させることができると考えられる.
50
第7章 せん断波の振幅を考慮した解析
7-1 解析方法
臨床実験によって得られた乳癌のデータについて,ROI 内を 1mm×1mm の領域に分割し,計 336 個の分割 ROI を作成した(Fig.7-1-1).この各分割 ROI において,せん断波の平均振幅,平 均伝搬速度,平均伝搬方向をそれぞれ算出した.但し振幅は,せん断波の基本波成分の実部 の二乗と虚部の二乗を足し合わせ,平方根を取った値をせん断波の振幅相当として計算し た. Fig.7-1-1 1mm×1mm 分割 ROI 次に,この分割 ROI の中から「平均振幅が十分な分割 ROI」と「平均振幅が不十分な分割 ROI」を分ける適切な振幅の閾値を決定した.閾値は,せん断波は反射や屈折により伝搬方向 の変化が大きいと振幅が弱くなる特徴があるため,正常乳腺においてせん断波の伝搬方向 の変化が小さい場合は振幅が強い,せん断波の伝搬方向の変化が大きい場合は振幅が弱い として,以下の様に導出した. 正常乳腺の画像において,右から左への平行な伝搬を 0[deg.]としたとき,45[deg.]を基 準として Fig.7-1-2 の様に分類した.
51 Fig.7-1-2 伝搬方向 45[deg.]を基準とした振幅の分類 以上の条件で分類をしたとき,ROC 曲線は Fig.7-1-2 となった. Fig.7-1-2 ROC 曲線 ROC 曲線から,曲線の下の面積(AUC)が十分に 1 に近いため,せん断波の伝搬方向 45[deg.]を基準とした振幅の分類能力は高いと言える.さらに,ROC 曲線の座標(0,1)に最も 近い点から、振幅の閾値を決定した.
52 7-2 正常乳腺と乳癌の比較 次に,臨床実験によって得られた正常乳腺と乳癌の画像について,せん断波の伝搬速度と 伝搬方向の評価を行った.ただし,せん断波の振幅が弱い領域は,伝搬速度や伝搬方向の計 算が正しくできていないと考えられるため,硬癌や脂肪により画像全体にせん断波の振幅 が入っていないデータは解析対象から除いた.これにより,乳癌の画像データ 4 例が除外さ れたため,乳癌 11 例,正常乳腺 4 例の解析を行った.さらに,7-1 節で導出した振幅の閾値を 用いて,せん断波の振幅が不十分な分割 ROI を除外した. Fig.7-2-1 に正常乳腺 5 例の波面マップを,Fig.7-2-2 に解析対象となった乳癌 11 例の 波面マップを示す.
53
54
55
Fig.7-2-2 乳癌波面マップ(BC:Breast cancer) (a)(b)(c)(d)浸潤性乳管癌(e)(f)DCIS(g)(h)硬癌
(i)乳頭腺管癌(j)小葉癌(k)粘液癌
次に,それぞれのデータにおいて分割 ROI 内の平均伝搬速度と平均伝搬方向を算出し,横 軸に伝搬方向,縦軸に伝搬速度を取った散布図を作成した.Fig.7-2-3 に正常乳腺の散布 図,Fig.7-2-4 に乳癌の散布図を示す.
56
Fig.7-2-3 正常乳腺のせん断波伝搬方向と伝搬速度に関する散布図 (MG:Mammary gland)
58
Fig.7-2-4 乳癌におけるせん断波伝搬方向と伝搬速度の散布図 (a)(b)(c)(d)浸潤性乳管癌(e)(f)DCIS(g)(h)硬癌
59 散布図から,乳癌では正常乳腺に比べてせん断波の伝搬速度と伝搬方向のばらつきが大 きいことが分かった.また,乳癌の一種である DCIS(BC3,BC8)では伝搬方向のばらつきは大 きいが,他の乳癌のデータと比べて伝搬速度のばらつきが小さく,正常乳腺と似た範囲に分 布していることが確認された. 7-3 せん断波伝搬速度・伝搬方向の評価 正常乳腺と乳癌のせん断波の伝搬速度と伝搬方向の違いを評価するために,伝搬速度と 伝搬方向それぞれについて箱ひげ図を作成した.Fig.7-3-1 に伝搬速度に関する箱ひげ図を 示す. Fig.7-3-1 せん断波の伝搬速度に関する箱ひげ図(橙:正常乳腺,青:乳癌) 但し,臨床実験によって得られた全 15 例の乳癌の画像のうち,癌内部でせん断波の減衰 が大きいデータと脂肪によりせん断波の減衰が大きいデータは除いている.
60 有意差検定を行った結果,有意水準 5%では有意差あり,有意水準 1%では有意差無しとい う結果が得られた. 次に,せん断波の伝搬方向に関する箱ひげ図を Fig.7-3-2 に示す. Fig.7-3-2 せん断波の伝搬方向に関する箱ひげ図 同じく, 臨床実験によって得られた全 15 例の乳癌の画像のうち,癌内部でせん断波の減 衰が大きいデータと脂肪によりせん断波の減衰が大きいデータは除いている. 有意差検定を行った結果,有意水準 5%と有意水準 1%の両方で有意差有りという結果が得 られた. 以上の結果より,せん断波の伝搬方向は伝搬速度に比べて正常乳腺と乳癌の有意差がよ り出やすいことが確認された.
61 さらに,11 例の乳癌のデータのうち,2 例以上得られた浸潤性乳管癌,DCIS,硬癌について 癌の種類ごとのせん断波の傾向と特徴を確認した.伝搬方向の安定性と伝搬速度の値か ら,Fig.7-3-3 のように分類がされた. Fig.7-3-3 乳癌の種類によるせん断波の特徴と傾向 このことから,悪性腫瘍の物質的,または構造的な違いによりせん断波の伝搬に異なる特 徴が現れることが示唆された.
62
第 8 章 結論
8-1 結論 本研究では,せん断波の伝搬の様子を実時間で映像化し組織の硬さを測定する新手法で ある CDSWI 法を悪性腫瘍である乳癌へと適用した.臨床実験やファントム実験により以下の 結論が得られた. [1] ファントム実験による本手法の評価 はじめに,硬さや構造が一様な寒天ファントムを用いたせん断波の映像化実験によ り,せん断波が一様に媒質内部を伝搬している様子を可視化することができ,各種マッ プの構築に成功した. さらに,乳腺ファントムを用いた実験により,ARFI 法との比較を行った結果,本手法 は ARFI 法に比べ同一媒質内での伝播速度のばらつきが小さく,さらに硬さが異なる媒 質間での有意差を ARFI 法と同様に本手法でも確認することができた. また,乳癌を模擬したファントムとして寒天内部に鶏の膝軟骨を埋め込んだファン トムを用いた映像化実験により,硬い構造の周囲でせん断波の伝搬方向が複雑に変化 し,伝搬方向が変化している領域ではせん断波の振幅が弱まっていることが確認され た. [2] 提案手法の乳癌への適用 乳癌のモデルとして,せん断波の伝搬速度が周囲に対して 5 倍の球形の構造物を含む 媒質を設定し,せん断波伝搬の 3D シミュレーションを行った.その結果,軟骨を埋め込 んだファントム実験と同様に,周囲と球形の構造物の境界でせん断波の伝搬方向が大 きく変化し,せん断波の反射や屈折が起こっていることが確認された. 次に,臨床実験によって計 15 名,6 種類の乳癌の測定を行い,せん断波の映像化を行 った.その結果,ファントム実験やシミュレーションと同様に腫瘍の周囲でせん断波の 伝搬方向の変化や伝搬速度の低速のリム,さらにせん断波の振幅の低下が確認された. このことから,せん断波の伝搬速度以外にも伝搬方向や振幅の変化において,正常乳腺 にはない乳癌の特徴があることが示唆された. [3] せん断波の振幅を考慮した伝搬速度・伝搬方向の解析 乳癌や正常乳腺の画像を 1mm×1mm の分割 ROI で解析することにより,せん断波の振 幅が一定以上入っている領域のみの伝搬速度と伝搬方向の評価を行った.その結果,伝 搬方向のばらつきは今回の解析対象となったすべての乳癌において大きく,正常乳腺 と乳癌の有意差が有意水準 1%まで認められた.伝搬速度に関しては,有意水準が 5%まで 認められた.さらに,伝搬方向の安定性と伝搬速度の値から,浸潤性乳管癌,DCIS,硬癌63 のそれぞれのせん断波の特徴を分類することができ,悪性腫瘍の物質的または構造的 な違いを判別することができる可能性が示唆された. 8-2 今後の課題 本研究を進めるうえで,今回の実験を通して挙げられた今後の課題について述べる. [1] 測定プロトコルの確立 せん断波の測定における誤差要因について,プローブの動きによる画像のずれやプ ローブの押しつけによる組織の圧迫,さらに加振位置の違いによる画像への影響など がある.これらの測定誤差を最小限に抑えるために,プローブ・加振器共に固定をした まま測定ができるプロトコルの確立が必須である.また,加振位置から画像面までの距 離の違いによる測定誤差を小さくするために,複数の小型加振器による計測が有効で あると考えられる. [2] 脂肪層でのせん断波の減衰 今回の臨床実験によって,脂肪層が厚い,または乳房全体が脂肪化している場合は, 脂肪の粘性が高いことによってせん断波の減衰が顕著に現れることが分かった.せん 断波の伝搬を正しく測定するために,脂肪層におけるせん断波の減衰を抑える必要が ある.そこで改善策として,せん断波の振幅は周波数に依存する為,低周波加振による 測定が必要である. [3] 乳癌の種類ごとのせん断波の特徴の抽出 今回の実験と解析により乳癌の種類の違いによって,せん断波の伝搬に異なる特徴 が現れる可能性が示唆された.この違いをより明確にするために,さらに臨床実験を重 ね測定データを増やす必要がある.
64
謝辞
本研究を進めるに当たり,終始適切なご指導を頂いた群馬大学大学院理工学府 山越芳樹 教授に深く感謝申し上げます.また,本研究の臨床的有用性の評価は共同研究に基づいたも のであり,共同研究者である群馬大学医学部中島崇仁先生に深く感謝いたします.日ごろの 測定においてご支援いただいた遠坂俊明客員教授,荻野毅技官に感謝申し上げます.研究を 共にし,日々の実験や解析にご協力いただいた学部 4 年 半田晃輝氏に心より感謝いたしま す.最後に,研究室での学生生活においてお世話になりました山越研究室の皆様に感謝の意 を表します.65
参考文献
[1] 砂川和宏, 金井浩. "動脈壁組織性状診断を目的としたずり弾性波伝搬の計測とずり 粘弾性推定の検討. " 超音波医学 33. 1 (2006): 65-74.
[2] Oestreicher HL. "Field and impedance of an oscillating sphere in a viscoelastic medium with an application to biophysics. " The Journal of the Acoustical Society of America, 23. 6 (1951): 707-714.
[3] Evans DH, Jensen JA, Nielsen MB. "Ultrasonic colour Doppler imaging."
Interface Focus (2011): rsfs20110017. [4] 近藤祐司「カラードプラ法」,
http://www. t-net. ne. jp/~kondoy/lecture/dop/doppler5. pdf, 2010, (2016/12/2 閲覧) [5] 笠原世裕(2014)「カラーフロー画像を用いた実時間ずり弾性波映像法」
[6] 山崎真有子(2016)「実時間せん断波映像法の乳腺への適用」
[7] Evans, Andrew, et al. "Quantitative shear wave ultrasound elastography: initial experience in solid breast masses." Breast Cancer Res 12.6 (2010): R104.
[8] 西拓治・明石好光, スプリング式かたさ試験機の調査,ゴム工業技術委員会第 31 分科
会資料, 1973 , 第 46 巻, p.183-184
[9] 山川誠, せん断波伝搬による超音波エラストグラフィの原理, MEDICAL IMAGING TECHNOLOGY, 2014, Vol.32, No.2, p.75