Future University Hakodate 2012 System Information Science Practice Group Report
プロジェクト名
生体情報の福祉利用∼筋電義手の開発∼
Project Name
Biological Information for Social Welfare∼Development of Myoelectric hand∼
グループ名
生体信号計測班
Group Name
Measurement of Myoelectric Group
プロジェクト番号/Project No. 25-A
プロジェクトリーダ
/Project Leader
1010093 佐々木啓孝 Hitotaka Sasakiグループリーダ
/Group Leader
1010198 坂本勝成 Katsunari Sakamotoグループメンバ
/Group Member
1009239 野呂健人 Kento Noro 1010134 岸本弘太 kouta Kishimoto 1010169 五十嵐彩乃 Ayano Igarashi指導教員
櫻沢繁,中垣俊之Advisor
Shigeru Sakurazawa Toshiyuki Nakagaki
提出日
2013年1月16日Date of Submission
があり,外観的な面の復元を目的とした装飾用義手,外観面は重視せずに様々な作業に使用す ることだけを目的とした作業用義手,義手の手先具や肘関節などの可動部分を自分で操作して 手の機能を再現しようとするための能動用義手が挙げられる.これらの義手の他に特殊な義手 として,筋電義手があり,この義手では,駆動用モータを切断端の筋肉が収縮する際に発生す る筋電位に応じて制御する.これによって,装着者はその義手を自分の腕のように動かす事が できる. 筋電義手は実際に,シカゴ・リハビリテーション研究所が2005年にバイオニック・アームと 称して開発されている.このバイオニック・アームにより,装着者は思考どおりに義手の動作 をコントロールすることができた.しかし,バイオニック・アームは侵襲的計測方法を用いる ため,筋肉に直接電極を埋め込む必要がある.そのため,手術が必要になることと感染症にか かる危険性がある. 本プロジェクトでは,皮膚の表面で計測可能な面筋電位を用いた筋電義手の開発を行う事を 目的とした.これにより,手術を要することなく,安価かつ安易に筋電義手を製作することが できる.このプロジェクトでは,筋電義手により,手首の前後動作及びグー・チョキ・パーの 動作の実現を中間までの目標とし,最終までに,手首の前後動作及び物を掴む事,摘む事を目 的とした.また,本プロジェクトでは生体信号計測班,生体信号制御班,生体信号製作班とグ ループに分かれ,ここでは主に生体信号計測班が行った事について主に記述している. キーワード 筋電義手,表面筋電位 (※文責:坂本勝成)
Artificial arms are made to help for people who have lost their arm in an accident and sickness. There are various kinds of artificial arms. For instance, cosmetic arms which was made for imitating human arms, working arms which was made to do a lot of works, active arms which was made for operating the movable parts such as joint of elbow and tools of the hand themselves. In addition, as particular artificial arms, myoelectric hand has been developed. Person who put on a myoelectric hand can move the hand as if it is own, because the control motors were controlled by their myoelectricity, and the myoelectricity occurred when the muscle at the cutting edge contracted.
In fact, Chicago Rehabilitation Institute developed a myoelectric hand which called Bionic Arm in 2005. Thanks for the hands, the person who put it on was able to control the hand as he hoped. However, Bionic Arm is used noninvasive measurement. Noninvasive measurement is the method that electrode is directly implanted in the muscle. Also, it is necessary to operate and risky to catch the infectious disease.
Therefore, in our project, we have developed a myoelectic hand using surface-myoelectricity which is able to measure on surface of the skin. It is not necessary to operate and we can manufacture it cheaper and easier. Our project aimed to identify movements of the each fingers such as rock-paper-scissors and movements of wrist such as back and forward in the midterm. Also, our project aimed to movement of catching and pinching an object in the final term. In our project, we made three groups, measurement of myoelectric group, control of myoelectric hand group, manufacture of myoelectric hand group. This report is mainly written measurement of myoelectric group.
Keyword myoelectiric hand, surface-myoelectricity
第1章 はじめに 1 1.1 背景. . . 1 1.2 従来例 . . . 1 1.3 従来の問題点 . . . 2 1.4 課題. . . 2 第2章 プロジェクト概要 3 2.1 目的. . . 3 2.2 課題解決のプロセス . . . 4 2.3 課題の設定と到達目標 . . . 5 2.4 課題の割り当て. . . 6 第3章 グループ内の学習 7 3.1 筋電義手の制作に携わる知識 . . . 7 3.2 筋電位の計測 . . . 8 3.3 フォトカプラ . . . 15 3.4 アクティブ電極. . . 16 3.5 導電布 . . . 18 3.6 電源. . . 18 3.7 圧力センサ用回路 . . . 25 3.8 ひずみゲージ用回路 . . . 27 3.9 センサ用電源 . . . 29 3.10 モータ用電源 . . . 30 3.11 コネクタ回路 . . . 30 3.12 抵抗のカラーコードの読み方 . . . 30 3.13 はんだ付け . . . 32 第4章 グループ内のインターワーキング 33 4.1 制作物 . . . 33 4.1.1 中間発表での製作物 . . . 40 4.1.2 最終発表での製作物 . . . 40 第5章 結果 43
6.1.1 坂本勝成 . . . 45 6.1.2 野呂健人 . . . 46 6.1.3 岸本弘太 . . . 47 6.1.4 五十嵐彩乃. . . 48 6.2 今後の課題 . . . 51 参考文献 52
第
1
章
はじめに
1.1
背景
筋電位の計測と筋電位計測回路の設計に取り組むことでの筋電義手の完成を目指す.また,筋電 位計測回路の役割は皮膚の筋電位を計測する際に生じるノイズの除去と筋電位の増幅の二つに分け られる.筋電位の計測方法に筋肉に針電極を埋め込み,直接電位を計測する侵襲的計測方法と皮膚 の表面からアクティブ電極を用いて表面筋電位を計測する非侵襲的計測方法が存在する[21].我々 のプロジェクトでは非侵襲的計測方法を用いて表面筋電位を計測する方法で行っている.その理由 として,筋肉から直接電位を計測する方法では正確な筋電位を計測可能であるが,筋肉を傷つけた り感染症の危険性がある.しかしながら,皮膚の筋電位を計測する際にも様々な問題が生じる.ま ず,計測する表面筋電位が微弱であるため計測が困難となる.また,コンセントから発生する電磁 波により50Hzの家庭用周波数や周りの電子機器から発生している周波数が筋電位の計測する周波 数に似ているため,ノイズ障害が起こってしまう.複数の関節と筋肉が同時に動作するため,各筋 で発生する筋電位の加重和として計測される電位から,複数関節の運動を個別に判別することが出 来ないということなどが挙げられる問題である.これらの問題を電子回路やアクティブ電極,導電 布を用いて緩和させる.これらの問題を対処するのが生体信号計測班である. (※文責:坂本勝成)1.2
従来例
筋電義手は筋電位を計測し,その信号に応じてモータを制御して物をつかむ,つまむ、腕の前後 動作などの動きを再現する仕組みである.スコットランドTouchBionics社が開発した「i-Limb」 という筋電義手は,完全に独自に機能的に曲がる指を持つ世界初の義手で葡萄のようなつぶれやす い物もつぶさすにつかむこともできる.見たの面でも「i-Limb」はより人の腕に近い外見をしてい る.しかし,限度を超えて握り続け、壊れやすい物を握り潰してしまうことがある.だが,これに 対して「i-Limb」は実際に自分の手で物体をしっかり掴んだという触感を,手ごたえとして感じ取 ることができる.さらに,十分な圧力がかかった時に,これ以上圧力がかからないよう義手に伝え る感知機能がついている[14]. (※文責:野呂健人)1.3
従来の問題点
筋電義手は,日本ではあまり普及していない.しかし,近年では国内での研究も進められ,数年 に十数本と少数ではあるが,徐々に実用化も進められている.しかし,筋電位義手は価格が140万 以上と高額である.保険の適用外であり広く普及するにはまだまだ時間がある.また,他国と比べ てみると,医療崩壊が進んでいるといわれている国でも,はるかに筋電義手の普及が進められてお り,国の補助も充実していることがわかる.例を挙げるとイギリスでは,幼少期に手を切断した場 合,筋電位義手を使用する割合は7割を占めている.またカナダでは,筋電義手を装着訓練をす るシステムが確立されていて,自宅での装着や訓練も可能である.さらに,通院による経済的負担 の軽減や,年齢に合った筋電義手の使用法も進められている.また,精密な動きが可能になった筋 電義手にも問題がある.幼少期からこのような義手を使う場合では,成長と共に定期的に適合して いるか調べ,随時適合するようにセンサーを埋め込む手術を行わなくてはならない.そのため使用 者に対し,経済的負担や身体的負担が大きくのしかかり,一般に広く普及することへの妨げになっ ている.このように意のままに動かせる義手を作るには,海外の技術を参考にする必要がある.海 外で製作された最新の筋電義手については,各指の独立制御が可能となっており,かつ本物の手の 動作をほぼ再現している.しかし,日本の技術では各指ごとに制御までの筋電義手の開発技術が追 いついていない.国内でも幾つかの会社が筋電義手の開発をしており,各指の制御は可能だがまだ 限られた動作しか再現できていない.また,義手の装着する人には支給制度があるがそれを踏まえ ても高額である.価格の他に,筋電位義手にはモータがいくつも取り付けてあるため義手の重さが 問題となる.成人では訓練によって,装着時に問題のない程度の重さであるが,子供にとっては日 常的に使用することは困難である.筋電義手は非常に便利な物であるが,このように価格や公的資 金の充実の他にも,義手の重さや、安全面、年齢に合った使用法の確立にも課題が多く残っている [15]. (※文責:野呂健人)1.4
課題
中間までの課題として,筋電位の計測のために,筋電位増幅とノイズの除去を行う基板作成の知 識,そのために必要なオペアンプ,反転増幅回路,非反転増幅回路,コンデンサ,ハイパスフィル タ、ローパスフィルタ、半波整流回路、差動増幅回路、インスツルメンテーションアンプなど,多 様の回路の知識を学んだ.その後,ブレッドボードやユニバーサル基板を用いてアンプを作成し た.そして,中間の筋電義手のための基板を作成した.まず,基板を作成するにあたり,設計図を 作成した.そして,それを基にユニバーサル基板を用いて基板と配線をはんだ付けし,アンプを作 成した.作成した基板が正常な筋電位を計測できているかを確認した後,はんだがうまく接着され ていなかった部分や,接着させない部分が接着していた部分などは微調整を繰り返し修復した. 最終発表までの課題としてはより精密な筋電位の計測を行うために5チャンネルから16チャンネ 32 16第
2
章
プロジェクト概要
2.1
目的
生体信号計測班の目的は,筋電位を計測するための筋電位計測回路の設計である.筋電位測定回 路の役割は,大きく分けて,「筋電位を計測する際に生じるノイズの除去」と「計測した信号の増幅」 の二つに分けることができる.生体信号計測班はこの二つの役割を達成させる事を筋電位計測回路 を設計する際の目標とした.筋電位の計測法には,筋肉から直接電位を計測する方法と皮膚表面に 電極を貼付し,経皮で筋電位を計測する方法の二通りが存在する.私たちのプロジェクトでは皮膚 の筋電位を計測する方法を用いた.その理由は筋肉から直接電位を計測する方法をとった際の問 題が原因である.この方法では確かに正確な電位を計測することができるが,被験者に対し侵襲的 であり,筋肉を傷つけたり感染症の危険性がある.また,限局された情報になるという限界点を持ち 合わせている.しかし,皮膚表面上の筋電位を計測する際にも様々な問題が生じる.まず,皮膚に 抵抗が存在し筋電位が微弱になる.コンセントから発生する電磁波により、50Hzのノイズが筋電 位に混入してしまう.そして,表面筋電位は、各筋で発生する筋電位の加乗和として計測されるた め,複数関節の運動を個別に判別することが困難であることが挙げられる.そしてこれらの問題を 解決させるため,導電布や,アクティブ電極を用いた筋電位測定回路を作成する事が生体信号測定 班の目的である. (※文責:岸本弘太)2.2
課題解決のプロセス
1. 手が動く仕組みの学習 課題解決のプロセス:指導教員,先輩方に筋電義手が動くまでの仕組みを学んだ. 2. 筋電義手についての仕組み 課題解決のプロセス:筋電義手の現状,問題点を学習する. 3. 目標の設定 課題解決のプロセス:3を踏まえた上で作成する筋電義手の内容を話し合い,前期までに作成 する筋電義手の目標を定めた. 4. 必要な知識についての学習 課題解決のプロセス:筋電位の計測に関する知識を,担当教員,先輩方,文献などから学習 した. 5. グループ間での知識共有 課題解決のプロセス:週に一度,各グループで学習したことを他のグループに説明を行うこ とで,進度を確認した. 6. 5チャンネルでの筋電位の計測 課 題 解 決 の プ ロ セ ス:ブ レ ッ ド ボ ー ド 上 に 筋 電 位 を 計 測 す る 回 路 を5チ ャ ン ネ ル 分 作 成 し , 実際に筋電位を計測した. 7. アンプの作成 課題解決のプロセス:ブレッドボードで作成した回路を基に,2チャンネル分の筋電位を計測 する回路をユニバーサル基板で作成した. 8. 電極の作成 課 題 解 決 の プ ロ セ ス:表 面 筋 電 位 を 計 測 す る た め に ,オ ペ ア ン プ を 組 み 込 ん だ 電 極 を 作 成 した. 9. 後期に向けての目標の再設定 課題解決のプロセス:前期での反省点を考慮して,後期の目標を設定した. 10. 16チャンネルでの筋電位の計測 課題解決のプロセス:16チャンネルで筋電位を計測し,電極を貼る箇所を決めた 11. 電極の作成 課題解決のプロセス:16箇所での計測を行うために電極を32個作成した.また,電極の位 置のずれが少なくなるように,ボタンを使って腕のサポーターを作成し,それに電極を取り 付けた. 12. 多チャンネル入出力のアンプの作成 課 題 解 決 の プ ロ セ ス:16チ ャ ン ネ ル 分 の 筋 電 位 を 計 測 す る 回 路 を ユ ニ バ ー サ ル 基 板 で 作 成 した. 13. 製作物の動作確認 課 題 解 決 の プ ロ セ ス:筋 電 義 手 が 設 計 通 り に 動 作 す る か を 確 認 し ,各 グ ル ー プ と の 調 整 を2.3
課題の設定と到達目標
全体の課題は,筋電義手の作成として筋電位の計測の際に被験者にかかる負担を減らし,人の構 造に近い筋電義手を作成することである.そのために,電極を体内に埋め込まずに皮膚に電極を貼 り付け表面筋電位を計測する方法を用いた.これにより電極を埋め込む必要がないため,感染症の リスクがなくすことができる.また,生体信号計測班の目的は精密な筋電位を計測するための筋電 位計測回路の設計である.またそこから,ノイズを除去し信号を増幅する電子回路をブレッドボー ド上に設計,作成し,実際に筋電位の計測に成功させることが生体信号計測班の課題である. また,生体信号計測班の課題設定とその到達目標として以下のような手順を設定した. 1.筋電義手を知る 筋電義手について知り,問題点等を学習した. 2.中間発表までの目標の設定 中間発表にどのような筋電義手を作成するかを決めるために話し合いを行った. 3.専門知識と技術の習得 人間の筋肉,筋電位発生のメカニズムやアンプを作成するために必要な電子回路の基本について, 指導教員や先輩方から講義を受けた. 4.筋電位計測 ノイズを除去し,筋電位を増幅する電子回路をブレッドボード上に設計し,作成した.そして,筋 電位の計測を行った. 5.後期に向けての目標の設定 前期で出来たこと,出来なかったことを踏まえ,最終的な目標と成果物について話し合った. 6.中間よりも精密な筋電位の計測 筋電位計測のためのアクティブ電極を32個作成した.また16チャンネルの筋電位計測回路を作 成した. (※文責:岸本弘太)2.4
課題の割り当て
坂本勝成の担当課題は以下の通りである. • 5月:電子回路・運動生理学について先生・先輩方から学習する,電気回路製作演習 • 6月:筋電位計測回路5チャンネル分の設計・製作,筋電位の計測 • 7月:中間発表練習,報告書の作成 • 9-10月:筋電位計測回路16チャンネル分の設計・製作 • 11月:筋電位の計測 • 12月:最終発表練習,報告書の作成 (※文責:坂本勝成) 野呂健人の担当課題は以下の通りである. • 5月:生理学,電気回路についての基本的な知識を担当教員や先輩から教えてもらう • 6月:電子回路と電極の作成 • 7月:筋電位の計測 • 9-10月:電極の作成,電源の作成 • 11月:原稿の作成,電源の直し • 12月:最終発表会練習,報告書の作成 (※文責:野呂健人) 岸本弘太の担当課題は以下の通りである. • 4月:生理学・電気回路についての基本的な知識を担当教員や先輩から教えてもらう • 5月:筋電位と電子回路についての学習とブレッドボードで練習 • 6月:電極の作成 • 7月:電極の作成と中間発表の練習 • 9月:筋電位の計測 • 10-11月:電極の作成 • 12月:最終発表練習,報告書の作成 (※文責:岸本弘太) 五十嵐彩乃の担当課題は以下のとおりである. • 6月:電極製作,電極用のコネクタ製作 • 7月:生体信号計測班のスライド製作 • 9月:モータ用のコネクタ製作 • 10第
3
章
グループ内の学習
3.1
筋電義手の制作に携わる知識
4月の段階で,我々は筋電義手がどのような仕組みで動かすことができるのか何もわからない状 態であった.そこで,担当教員及び前年度以前にこのプロジェクトに関わった先輩方から筋電義手 の製作に必要な知識を講義してもらった.その講義内容に関しては以下に示す. 1.人体生理学に関する知識 人間の筋肉は,筋肉組織を形成する収縮性のある筋細胞,または筋繊維という細長い繊維状の束 により形成されている.筋肉細胞が束になっている筋細胞には,ミオシンとアクチンという2種類 のタンパク質が存在し,これらが互いに重なって相互にスライドする構造となっている.神経系か らの伝達により,カルシウムイオンの濃度変化が起こる.そしてトロポニンがカルシウムイオンを 受容する.ミオシンとアクチンの相互作用抑制が解除されて,ミオシンとアクチンが滑り運動を開 始する.これが筋収縮である.収縮後,カルシウムイオンがカルシウム小胞に回収されてミオシン とアクチンの相互作用抑制により筋が弛緩する.筋肉が収縮と弛緩を起こすときに微弱な電位が発 生する.これが筋電位となる. 3.生体信号の計測に関する知識 生体信号の計測に関する知識は次のセクションで説明する. 教わった知識を基にして,前年度の先輩方が作った計測回路・アクティブ電極を模倣してそれら を作製した.そして,中間発表に向けてどのように工夫していくかを考えた. (※文責:坂本勝成)3.2
筋電位の計測
筋電位の計測については,先に述べた生体信号の計測に関する知識により計測を行うことができ た.講義してもらった電気回路及び,それに基づく知識は以下に述べる. オームの法則 電荷が導体中を移動する際に電流が発生する.電流は,導体の断面を1秒間にどれだけの電気量 が通過するかで定め,電流の単位はアンペア(記号:A)を用いる.電圧は,電場の中にある電荷を ある点Aから点Bの位置まで運ぶ時の電位差で定め,電圧の単位はボルト(記号:V)を用いる. これより,ある導体に流れる電流I(A)とかかる電圧E(V)の間に次の比例関係が成り立つ. E= RI (3.1) この比例関係をオームの法則といい,比例定数Rが電流の流れにくさを示している.また,Rは 抵抗または電気抵抗と呼ばれる.抵抗の単位はオーム(Ω)を用いる.オームの法則により,電圧・ 抵抗・電流のうち2つの値が定まっていれば,残りの1つも計算で求めることができる. コンデンサ コンデンサは,キャパシタンスにより電荷を蓄えたり放出したりすることができる受動素子であ る.コンデンサに蓄えられる電気量をQクーロン(記号:C),電気容量をCファラド(記号:F), 加える電圧V(V)とすると次の比例関係が成り立つ. Q= CV (3.2) コンデンサはフィルタなどの回路に利用され,実際には抵抗などと一緒に用いられることが多い.オペアンプ 理想的なオペアンプは以下のような性質を持っている事を前提とした演算増幅器で,主に反転増 幅回路や非反転増幅回路,インスツルメンテーションアンプの回路を作成する際に使用される[2]. • 増幅率は無限大. • 入力インピーダンスは無限大. • 出力インピーダンスは0. • オペアンプから発生するノイズは無いものとする. • 入力電圧または信号が0の時は出力電圧は0となる. 図3.1 オペアンプ
反転増幅回路 反転増幅回路は,入力電圧の値を正負反転させて増幅する回路である(図3.2).増幅率は以下の 式によって求めることができる. 流れる電流をIとすると, Vin= R1I Vout = −R2I Iを消去すると, Vout= − R2 R1 Vin (3.3) となる[3]. 非反転増幅回路 非反転増幅回路は,入力電圧の値を正負反転させずに増幅する回路である(図3.3).増幅率は以 下の式によって求めることができる. 流れる電流をIとすると, Vin= R1I Vout− Vin= −R2I Iを消去すると, Vout= (1 + R2 R1 )Vin (3.4) となる[3]. 図3.2 反転増幅回路 図3.3 非反転増幅回路
作動増幅回路 差動増幅回路(図3.4)は,2つの入力電圧の差を増幅する回路である.また,この回路は反転増 幅回路と非反転増幅回路を組み合わせて作ることが出来る回路である.この回路は,コンセント等 から発生する50Hzの家庭用周波数である同相ノイズを,それらの差を取ることによって打ち消す ことが出来る.また,インピーダンス変換や信号変換も行うことが出来る回路である[3].増幅率 は次式で表される. Vout= R2 R1 (V 2in− V 1in) (3.5) 図3.4 作動増幅回路
ハイパスフィルター ハイパスフィルター(ローカットフィルター)は,設定したカットオフ周波数fcよりも高い周波 数の信号を通して,低い周波数の信号を遮断するための回路である[4].これは,低周波数のノイ ズを除去することに適している.フィルターのシステム応答限界であるカットオフ周波数fcはコ ンデンサ(C)と抵抗(R)より以下の式で表される. fc= 1 2πRC 図3.5 ハイパスフィルター ローパスフィルター ローパスフィルター(ハイカットフィルター)は,設定したカットオフ周波数fcよりも低い周波 数の信号を通して,高い周波数の信号を遮断するための回路である[4].これは,高周波数のノイ ズを除去することに適している.フィルターのシステム応答限界であるカットオフ周波数fcはコ ンデンサ(C)と抵抗(R)より以下の式で表される. fc= 1 2πRC 図3.6 ローパスフィルター
半波整流回路 半波整流回路は,主にダイオードを利用して実現される.ダイオードは整流素子と呼ばれる素子 の1つで,電流をアノード(+)からカソード(-)への方向にしか流さない性質を持っている.その ため,回路中にダイオードを1つ挟むことにより,電流を常に一方向にしか流れないようにするこ とができる.また,半波整流回路は,整流素子1個だけで手軽に回路が構成できるという利点があ るが,その反面,負の信号は全て遮断されてしまう.そのため,筋電位の計測時に負の信号がなく なり,正の信号のみだけを利用するため,筋電義手を制御する際に情報が不足してしまう可能性が ある[1]. 図3.7 半波整流回路 全波整流回路 全波整流回路は,交流の正負両方の電流を同一方向へ流れるようにする回路である.筋電位を計 測時に,負の信号を正に変換することができるので,筋電義手を制御する際に全ての情報を伝える ことが可能となるという利点があるが,回路が複雑になってしまう[1]. 図3.8 全波整流回路
積分回路 積分回路(積算回路)は,入力電圧の波形の時間積分に等しい波形の電圧を出力する回路である. コンデンサの両端の電圧は,流れ込んだ電流の積分に比例している.また,オペアンプを用いるこ とにより,より安定した積分波形を得ることが出来る.R1を流れる電流をIR 1とすると, IR1 = dQ dt = C dVout dt ⇔IR 1dt= CdVout ⇔dVout= 1 Cdt ⇔ ∫ dVout= 1 C ∫ IR1dt ⇔Vout= 1 C ∫ IR1dt さらに,オペアンプの入力インピーダンスが十分高いものとすると,オペアンプの入力電流はほぼ 0と扱えるので,コンデンサに流れる電流をIC とすると, IR1 = −IC また,オームの法則より IR 1 = Vin R1 であるから, Vout= − 1 CR1 ∫ Vindt (CR:時定数) (3.6) CRの値によって,この値が大きいと回路の応答が遅くなり,逆に値が小さいと回路の応答が速く なるという指標を時定数と言う.図3.9にある抵抗R2は,リークの役割を持っている[4]. 図3.9 積分回路 (※文責:坂本勝成)
3.3
フォトカプラ
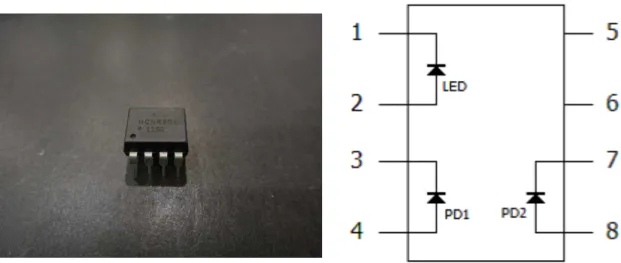
フォトカプラは入力された電気信号を光に変換し,その光で受光素子を導通させることにより信 号を伝達する.外部からの光を遮断するパッケージに閉じ込められた構造となっている.フォトカ プラを用いることにより,計測回路と主電源を切り離す役割を持つ.筋電位を計測する際にこれを 用いることによって,主電源や高電圧側のノイズが計測回路に影響が出ないようにすることができ る.本プロジェクトでは,計測回路とマイコンにこのフォトカプラ回路を用いた. 図3.10 筋電位回路に接続するフォトカプラ回路 図3.11 マイコンに接続するフォトカプラ回路 (※文責:坂本勝成)3.4
アクティブ電極
役割としては,計測対象のインピーダンスよりも計測器のインピーダンスを高くする効果を持 つ.アクティブ電極と皮膚の接地面にオペアンプと呼ばれる皮膚の高いインピーダンスを変換する 機器が設置されている.これにより,電位を他で電圧降下させずに計測器で効率よくケーブル先に おくることが出来る. また工夫した点として,オペアンプを使用する際,金属部分が触れてショートしてしまう可能性が あるため,接着剤で固めた所がある[17]. 図3.12 接着材塗布前 図3.13 接着材塗布後 (※文責:岸本弘太) 電極の作り方 電極の作成方法を以下に示す. 図3.14 電極製作図 まず,オペアンプの足を全て上へ曲げる.このとき,ピンセットを使用してピンがオペアンプから 取れてしまわないように注意する.かりとつながっているかはチェッカーによって確認することができる. オペアンプの4ピンと7ピンを上に上げる.このとき4ピンは3ピンと,7ピンは6ピンと離れる ようにピンを上に上げると後のはんだ付け作業が楽になる.このときもピンが折れやすいので注意 する. コネクタとオペアンプを両面テープで固定し,コネクタの一番左側の線とオペアンプの4ピン,コ ネクタの真ん中にある線とオペアンプの2ピン,6ピンをつないだ導線,コネクタの一番右側の線 とオペアンプの絶縁体の約1ミリから2ミリの長さをワイヤストリッパを使って剥く.剥いた先 の導線をはんだでコーティングすると導線の束がまとまり,はんだ付けの作業が捗る. 銀板を丸い形に切り取り,平らにした後オペアンプの3ピンと接続する.銀板は高価なものであ り,しわがはいりやすかったり指紋が付きやすいので丁寧に扱う必要がある.銀板を直径約1cm の大きさで切り取り平らに伸ばした後,銀板の上にオペアンプを乗せてオペアンプの3ピンと切り 抜いた銀板をはんだ付けにより接着する. 金属部分が触れてショートしないよう,又オペアンプが隠れるように数回に分けてボンドをつけ る.また,コネクタ周りにもつける.このとき,必ず電極の銀板以外の金属部分がボンドで覆われ ている必要がある. 電極に付けたボンドの上に凸型のスナップ式ボタンを乗せて,それらをボンドで固定する. 以上でアクティブ電極が完成する[17]. (※文責:岸本弘太)
3.5
導電布
銀を蒸着した糸であみこんだ布で作られており,筋電位の測定箇所を覆い体との基準電位をあわ せることで,外部からのノイズを遮蔽することができる. 図3.15 導電布 (※文責:岸本弘太)3.6
電源
3端子レギュレータ 3端 子 レ ギ ュ レ ー タ は ,電 気 製 品 の 電 源 部 に 使 用 さ れ る 半 導 体 を 含 む 電 子 部 品 で あ る .レ ギ ュ レータの一種であり,名前の通り3本の端子を備えて,定電圧回路を簡単に構成できる.レニア レギュレータとも呼ばれる.入力端子(IN),出力端子(OUT),グラウンド(GND)又は共通端子 (COM)の3端子から構成され,出力電圧固定型と出力電圧可変型がある.出力電圧固定型では, 入力端子と出力端子に発振防止用のコンデンサを2個を接続するだけで脈流を安定化する回路が 構成でき,電圧可変型ではそれらに電圧設定用の抵抗器が加わる.また,電力の変換効率や発熱の 少なさではスイッチングが優れている.そのため,製品の電源回路に採用されるのは比較的少ない が,シリーズレギュレータは,スイッチングノイズがなく,外付け部品が少なく回路が簡素である. しかし,低価格であるというメリットがあるため,使用されているというものである.また,コン デンサというのは静電容量(キャパシタンス)により電荷(電気エネルギー)を蓄えたり,放出した りする受動素子であり,静電容量の単位はF(ファラド)が使われる.通常使われるコンデンサは数 pF∼数万μF程度であるが,電気二重層コンデンサなどでは数千Fオーバーの大容量な物もあ る.両端の端子に印加できる電圧(耐圧)は,2.5V∼10kV程度で様々である.また,アナログ電の物が幅広く用いられる.低コスト化,小型化の要求に強い民生用小型機器では,チップ積層セラ ミックコンデンサが幅広く使われていたり,デジタル電子回路でバイパスコンデンサ(パスコン) としての用途が圧倒的に多く、他に僅かながら推奨発振器やタイミング回路に使われる.重荷チッ プセラミックコンデンサが使われていたり,電源回路で,アルミ電解コンデンサを中心として,セ ラミックコンデンサやタルタルコンデンサが使われている.また,回路作りにおいては電解コンデ ンサや積層セラミックコンデンサがよく使われる[7]. トランジスタ トランジスタは電子回路の設計に欠かすことのできない重要な素子である.電子回路では,増幅 回路が非常に重要な役割りを果たす.アナログ回路にとってトランジスタを一言でいうと増幅素子 である電気信号(電圧や電流)を増幅することができるということは,非常に重要なことである. 例えば,携帯電話などの通信機器は空中を飛んでくる電波を捉えて音声に変換する.この電波は非 常に微弱な信号であるため,増幅してやる必要がある.また,世の中にあふれているエレクトロニ クス製品は,センサー機能を持つものが多く存在する.電話には音を捉えるセンサー(マイク),デ ジカメには光を捉えるセンサー(CCDやCMOSセンサー),調理用の電化製品には温度センサー などが使われる.しかし,困ったことにセンサーというものは多くの場合,ごく微小な電気信号し か発生しない.そのため,電気信号を増幅する必要がある.このように増幅できるということは非 常に重要なのである.これら電気信号の増幅は,トランジスタにより実現することができる.他に も増幅することの重要性はある.オペアンプという回路は,アナログ回路には絶対に欠かすことの できない回路である.このオペアンプは,回路技術を駆使してトランジスタを組み合わせて作られ ており,数百倍,数千倍以上の電圧増幅率を持っている.トランジスタとして現在よく使われてい るものとして,「バイポーラトランジスタ」と「MOSトランジスタ」がある.バイポーラトランジ スタの回路はコレクタ,ベース,エミッタと呼ばれる3つの端子を持ちます.MOSトランジスタ の回路はドレイン,ゲート,ソースと呼ばれる3つの端子を持っている.バイポーラトランジスタ と MOSトランジスタ の特性の違いについて,まず始めに,増幅率である.電気信号を増幅する とき,高い利得を得るためにはバイポーラトランジスタの方が有利である.その他にもバイポーラ トランジスタは,MOSトランジスタに比べてより高い周波数で動作することが可能である.また, ノイズ特性もバイポーラトランジスタの方が良いと言われている.携帯電話などの無線機器が受信 しなければならない信号は一般に周波数が高く,また微小な信号であるため,高周波動作やノイズ 特性が重要となる.一方,MOSトランジスタは小さく作ることに向いており,微細化することに より高い集積度を実現することができる.トランジスタをシリコンなどの半導体物質の上に多数構 成する集積回路において,MOSトランジスタは非常に有利である.小さな面積に多くのトランジ スタを構成することができるため,MOSトランジスタはデジタル回路として使用することに向い ている.デジタル回路として使用した場合,MOSトランジスタは動作時以外は電流が流れないと いう特長を持っている.つまり,低消費電力である.MOSトランジスタはデジタル回路として使
タル・アナログ混載の回路設計は非常に重要で,微細化がしやすいMOSトランジスタを使うこと で「小型化」,「高機能化」が可能となる.MOSトランジスタの微細化は年々進んでおり,世の中の 数多くの電化製品が年々小さくなり,高機能化していくことに重要な役割りを果たしている[21]. コンデンサ コン デン サ とは 、電 荷を 蓄 えた り放 出 した り する 受 動部 品 のこ と.キ ャ パシ タ と呼 ば れる こ と もある.コンデンサの電荷を蓄える能力が静電容量であり,その単位はF(ファラッド)である. 電気 回路 にお い てコ ン デン サ は,電 荷 エネ ルギ ー を蓄 え る用 途 に使 わ れて いる .こ のほ か ,直流 (DC)成分を通さないことを利用したDCブロッキング(阻止)用途や,低周波領域に比べて高周 波領域にインピーダンスが低いことを利用して信号の高周波成分だけをグラウンド層に迂回させる バイパス用途なども代表的な使われ方である.バイパス用途で使われるコンデンサは,デカップリ ング・コンデンサと呼ばれることもある.セラミックコンデンサ電波等を扱う高周波回路などで良 く使われいる.つまり周波数特性が良い.(高い周波数でも使える)低周波(オーディオ帯域)で も使われる事がありますが一般に外乱に弱くノイズの原因になる.1pF∼0.22μF程度が一般 的である.又,積層セラミックコンデンサというのがありますが,これはデジタル回路の電源イン ピーダンスを下げる目的で0.1μFの物が良く使われる. フィルムコンデンサ通称、マイラコンデンサ(ポリエチレンフィルム)が一般的である.主にオー ディオ回路等の低周波回路で好んで使われいる.ESR(直列等価抵抗)が小さく比較的温度特性も 良いのが特徴である.外形も比較的小型である.0.001μF∼0.1μF程度が一般的である.又, よりHiFiを好む場合はポリプロピレンフィルムコンデンサを使用する.但し,少々高価で外形も 大きくなる. ス チ ロ ー ル コ ン デ ン サ 通 称 ,ス チ コ ン と 呼 ば れ て い る .50pF∼4700pF 程 度 が 一 般 的 で あ る . ESRが小さく,外乱にも強い為高級オーディオの入力段やNFB(ネガティブフィードバック)回 路等に良く使われている. アルミ電解コンデンサ通称,ケミコンと呼ばれている.ケミカルにケミである.0.1μF∼10000 μF程度が一般的である.一般には,他のコンデンサと違いプラス,マイナスの極性がある.又, 電解コンデンサには耐圧があある.2倍以上の余裕は欲しい.また,耐圧を超えて使用すると寿命 を縮めてしまうばかりか場合によっては破裂して大変危険である.又,ケミコンは安価で大容量で ある変わりにESRが大きく,又高い周波数ではほとんど使い物にならない.主に,電源回路など に使われている. タンタル電解コンデンサアルミ電解に比べ小型,比較的周波数特性に優れていている.しかし少々 高価なのが難点である.容量は0.1μF∼47μFが一般的である.又タンタル電解コンデンサ の使用上気を付けなければならない事に耐圧以上の電圧を掛けた等して壊れた場合,コンデンサが ショートしてしまう事である.これによって他の部品まで壊れてしまう事がある. OS‐CON サンヨーの電解コンデンサの形状は一般のアルミ電解の様な形状をしている.ま た,性能は非常に良い.ESRが非常に小さく,温度特性も良いのが特徴である.スイッチング電 源やDC-DCコンバータ等には必需品である.又,オーディオ回路等の電鍵回路にも最適である.
このコンデンサは誘電体として薄い酸化膜を使い,電極としてアルミニュームを使っている.誘電 体を非常に薄くできるので,コンデンサの体積に比べて大きな容量を得ることができる.大きな特 徴は極性(プラス電極,マイナス電極が決まっている)があること,普通はコンデンサ自体にマイ ナス側の足を示す表示が付いている.また,かけられる電圧,容量(電気を蓄えられる量)も表示 されている.極性を間違えたり,電圧が高すぎたりすると,コンデンサが破裂(パーンと音を立て て飛び散るので非常に危険)してしまうことがある.(通常、回路図にも+の記号で極性を明記す る)このコンデンサは1μFから数千μF,数万μFなど比較的大きな容量が得られ,主に電源の 平滑回路,低周波バイパス(低周波成分をアースなどに逃がして回路動作に悪影響を与えない)な どに使われる.ただ,コイル成分が多く高周波には向かない[23]. 3本の端子には1,2,3それぞれ番号が付けられ,その1番には入力する側のプラス電圧,2番 はそれぞれのマイナス(GND),3番には出力として取り出す電圧のプラスをつなぐ.実際の部品 とピン番号の対比は,部品の型番刻印面を手前にして左から1,2,3と数える. 図3.16 3端子レギュレータ (※文責:野呂健人)
電源回路の材料 ス イ ッ チ ス イ ッ チ が オ フ の と き は 、LEDは 点 灯 し な い .ス イ ッ チ が オ ン の と き は ,LEDは 点 灯する.ディジタル回路はスイッチの役割を半導体が行う.半導体のオン/オフでLEDは点滅し, 見えない半導体の状態が見ることができる. 基板基板とは、回路設計に基づいて、部品間を接続するために必要な導体パターンを絶縁基板の表 面又は表面とその内部にプリントによって形成した板を指す。 200mAhの9V電池 2個乾電池 3端子レギュレータ 3端子レギュレータは電気製品の電源部に使用される半導体を含む電子部品である.また,一定の 出力電圧を得るための素子で,電源の電圧は直接ICなどの電源に使うと壊れる可能性がある.名 前の通り3本の端子を備えて,定電圧回路を簡単に構成できる.(単電源回路では正電圧型が用い られ、負電圧型はオペアンプを用いた回路等で正負2電源を作るときに重用される.)こういった 事を防ぐため,3端子レギュレータで使用とする電圧に変換しなければならない[7]. トランジスタ エミッタ(E),コネクタ(C),ベース(B)となずけられた3本ピン(電極)を持ち,極性によって, npn型およびpnp型の2種類がある。基本的には電流入力、電流入力型の増幅素子である[7]. 発行ダイオード(LED)2個 アノード(A)とカソード(K)の2ピンをもつ(2極の)素子で,アノードからカソードの方向(順 方向)にのみ電流を流す.このA-K間に逆方向の電圧を加えて使うツェナーダイオード(定電圧ダ イオード)もあるが,これは安定な一定電圧を得るために使わる[7]. コンデンサ4個(5V47μF3本,5V10μF) 電流を電荷という形で蓄積しようとする作用の容量をいい,その作用を持つ部品をコンデンサと呼 ばれる.このコンデンサに直流電圧を加えると,その電圧と容量に比例した量の電荷が蓄積(充電) され,充電が終わると電流は流れなくなる.交流電圧を加えた場合は,容量・周波数・電圧に比例 した大きさの電流が流れ続け,電圧の位相より電流の位相(変化のタイミング)が進む[7]. 電池ソケット2本 電池の取り外しが容易になる ジャックコネクタ3個 コネ クタ は機 械 的・電気 的 に接 続 する 役 目を 持っ た 電子 部 品で あ る.半 田結 線 によ る 永久 接 続か
図3.17 回路(表) 図3.18 回路(裏) これらの部品を回路の設計図通りに組み立てるとDC5V電源ができる.スイッチング制御電源 と比べ,電力損失は多くなるが,電源リプルやノイズが少なくて安定性が高い.また,回路面積も 小さくて低価格である等,優位な点が多いため小電力回路の電源として多用されている.三端子レ ギュレータはICにコンデンサーを2つ付けるだけで精度も高く各種保護回路もついている電源が 手軽に作れるので多用される.[13]
設計図の作成 基板を作成するにあたり,まず最初に設計図を作成を行った.設計図を作成することによって基 板を作成するときに穴の位置など間違える失敗を減らして基板に作成したものを動作させるときに 動かなかった場合,設計図を見ることによって失敗した部分を見つけやすくするためである.また 部品によって方向が決められている物があるのでそこで確認の為に必要である.また,抵抗を立て ることでスペースを減らせることやできるだけ基板の表に配線を出さないほうがいいことなど工夫 した設計図ができた. 動作確認 完成した基板が正常に動作するかを信号の波形を目で見ることができるオシロスコープを使用し 確認する.確認したところ正常に電流がながれないことがあった.このような場合,そこで問題が あるかを確かめるために,回路の途中にプローブをあて,あてたところの波形が正常であるかそう でないかを判別する方法がある.この方法により半田が隣の線と接触していたりするなど問題が沢 山あることがわかった.またトランジスタが故障していたことなどもわかった.このような問題点 を解決した所,綺麗な波形が計測された.トタンジスタの故障に関しては,ダイオードを早い段階 から取り付けてしまった為,半田付けをする際の熱により故障したものと思われる. ノイズ対策 発生するノイズの少ない部品を選び,ノイズを発生させない使い方をすれば良さそうですが,軽 薄短小,高機能,高速化,そして低価格などが優先され,設計の最終段階でノイズの法規制に合致 するよう,手直しするのが電子回路計の実態である.環境を整えるには公認されたノイズ測定環境 を常時は必要としないが,オシロスコープの波形観測だけでノイズ対策および効果を確認すること は困難である[7].開発設計業務に必要な最小限の設備と環境を設定するには色々工夫した.まず, コンセントから発生する電磁波により50Hzの商用電源が筋電位の計測する周波数と混同してノイ ズになってしまう等の問題がある為,家電製品などから計測器を放した.また地面と回路が接触し ないようにサスペンサーを使用し,ノイズの影響を受けにくくさせた. (※文責:野呂健人)
3.7
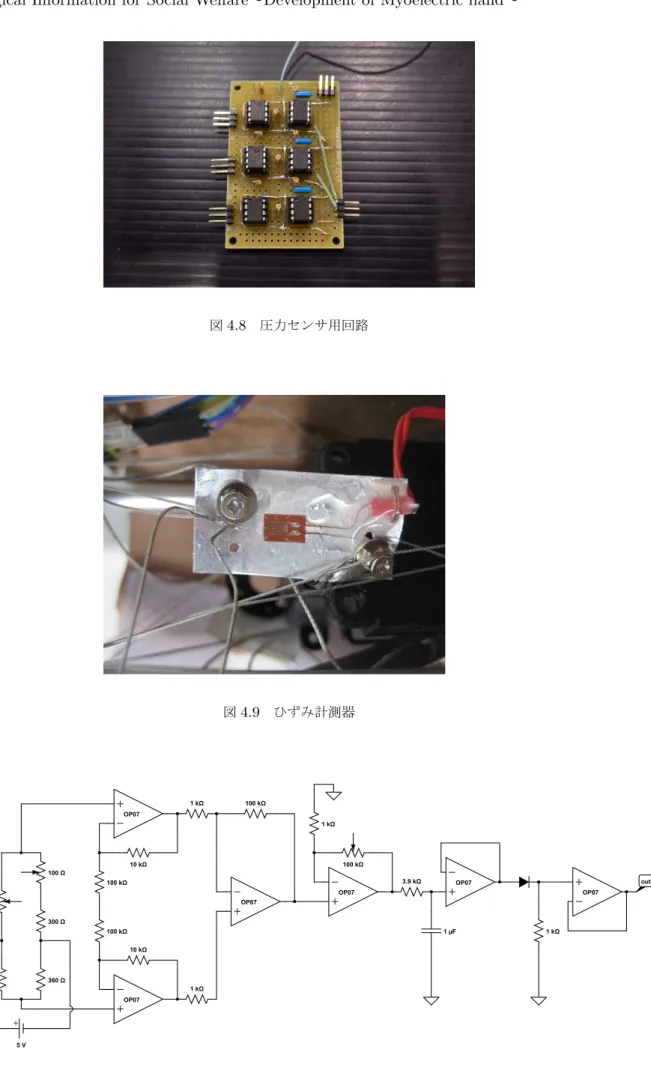
圧力センサ用回路
ここでは,圧力センサについて説明する.圧力センサ用回路(図3.20)は,圧力センサ,反転増 幅回路,積分回路で構成される.[13] out 圧力センサ 図3.20 圧力センサ用回路 圧力センサ 圧力センサ(図3.21)は,銀などの導電材料の層と感圧インクの層で構成される薄いフィルム状 のセンサである.圧力センサを用いた計測の原理は,センサに力を加えると,その力に反比例して 感圧素子の抵抗が変化し,それが電圧の変化として読み取られるというものである.抵抗値の変化 を電圧の変化として計測するために,ブリッジ回路や反転増幅回路が用いられる.[12] 図3.21 圧力センサ3.8
ひずみゲージ用回路
ここでは,ひずみゲージ,ひずみ計測器,ホイートストンブリッジ回路について説明する.ひず みゲージ用回路(図3.22)は,ひずみ計測器,ホイートストンブリッジ回路,差動増幅回路,非反 転増幅回路,ローパスフィルター,半波整流回路,ボルテージフォロワで構成される.[13] 5 V out ひずみゲージ 図3.22 ひずみゲージ用回路 ひずみゲージ ひずみゲージ(図3.23)は,数ミクロン厚の金属の抵抗膜をプラスチックフィルムで作られた ベースで挟んだ構造になっている.ひずみゲージを用いた計測の原理は,外力による材料の伸び・ 縮みによって抵抗値が変化し,それが電圧の変化として読み取られるというものである.抵抗値の 変化を電圧の変化として計測するために,ブリッジ回路が一般に用いられる.[9] 図3.23 ひずみゲージに接着剤でリード線の部分をアルミ板に固定する.[10] ホイートストンブリッジ回路 ホイートストンブリッジ回路(図3.24)は,ひずみゲージの抵抗値の変化を電圧の変化として取 り出す回路である.ひずみが大きいほど抵抗が伸びるので,ひずみゲージの抵抗値は高くなる.ひ ずみゲージの抵抗値が高くなると,出力電圧も大きくなる.逆に,抵抗値が低くなると,出力電圧 も小さくなる. 抵抗の変化から電圧の変化を導く過程を以下に示す. 入力電圧をE,出力電圧をeとすると, e= R1R3− R2R4 (R1+ R2)(R3+ R4) E 力が加えられたことにより,△Rの抵抗値の変化が生じると, e= (R1+ △R)R3− R2R4 (R1+ △R + R2)(R3+ R4) E ここで,R= R1 = R2 = R3 = R4とすると, e= R 2 + R △ R − R2 (2R + △R)2R E [9] R2 R4 R3 E e R1 図3.24 ホイートストンブリッジ ひずみと抵抗値の関係 ひずみゲージに力を加えると,抵抗膜が引っ張られたり,圧縮されたりすることで伸び縮み,長
は,次の抵抗と材料の関係式を用いて説明することができる.
R= ρL A
Rが抵抗値,ρが比抵抗,Aが断面積である.ここで,両辺の対数を取り,式を変形する.
log R = log ρ + log L − log A
上式の両辺を微分すると次の式が得られる. △R R = △ρ ρ + △L L − △A A ここで,金属の場合,△ρ ρ = 0となり無視できる.また,ポアソン比をσとすると, △A A = −2σ △L L と書ける.これを, △R R = △ρ ρ + △L L − △A A に代入すると, △R R = (1 + 2σ) △L L を得る.(1 + 2σ)はゲージファクタと呼ばれ,Ksと表される.ε= △L L とKsを用いて次のよう に変形する. △R R = Ks △L L = Ksε 以上より,ひずみと抵抗値の関係を表す式を求めることができた.しかし,ひずみによる抵抗値の 変化は数百mΩと非常に小さいため,ひずみゲージを用いて検出される △R R も非常に小さくなり, 検出方法を工夫する必要がある.そこで,例として,上記のホイートストンブリッジ回路を用いる ことが挙げられる.[9] ひずみゲージ用回路の材料 抵抗: 300Ω1個,360Ω2個,1kΩ4個,10kΩ2個,100kΩ 3個,3.9kΩ 1個 可変抵抗: 100Ω 1個,100kΩ1個 コンデンサ: 1μF 1個 オペアンプ: OP07 6個 ひずみゲージ: KFG-2-350-C1-11 1個 コネクタ: オス 2ピン分 ユニバーサル基板: 1枚 リード線: 適量 :
め,センサ用電源とモータ用電源は分離させると良い.センサ用電源には,モータ用電源よりノイ ズが小さく出力電圧の変動が少ない電源が適している.[9]
3.10
モータ用電源
モータ用電源を選ぶ際に注意すべきことについて述べる.モータを動作させるためには,電力を 供給 する 電源 が 必要 で ある .モ ータ を 制御 する た めに は ,コン ピ ュー タが 必 要で あ るが ,通 常の ノートパソコンやデスクトップ型のコンピュータではモータを動かすような大きな電流を供給する ことができない.これより,モータを駆動させるためには電流をモータへ供給するためのモータ用 電源を用意する必要がある.モータを制御する場合,モータ用電源はモータドライバに接続するた め,電源の出力電圧は接続するモータドライバの規格に合った範囲から選ばなければならない.[9]3.11
コネクタ回路
コネクタ回路は,筋電位計測回路の出力に繋がれたマイコンをモーターへ繋ぐための回路であ る.コネクタ回路の基板には,電源スイッチが取り付けられており,このスイッチにより直接筋電 義手を稼動させたり,停止させたりすることができる.[9] コネクタ回路の材料 電源スイッチ(6ピンのもの):1個 電源ソケット:1個 コネクタ: オス 12ピン分 ユニバーサル基板: 1枚 被服銅線: 適量 銅線:適量3.12
抵抗のカラーコードの読み方
ここでは,抵抗のカラーコードの読み方について説明する.抵抗には,表面に,抵抗値が数字で 書かれているものと,色の付いた帯が複数入っているものがある.数字で書かれているものはそれ がそのまま抵抗値となる.一方,色の付いた帯が入ったものは,その色の帯の組み合わせによって 抵抗値を知ることができる.抵抗値を表す部分の色は10色あり,0から9までの数字がそれぞれ の色に対応している.色と数字の組み合わせは以下のようになっている. 黒0 茶1 赤2 橙3 黄4抵抗には,4本の帯が入っており,左から1本目と2本目の帯で0から99までを表すことがで きる.3本目の帯は,10の何乗かを表す.これら2つの値を掛け合わせることにより,抵抗値を求 めることができる.4本目は許容誤差を表しており,色との組み合わせは以下のようになっている. 茶±1% 赤±2% 金±5% 銀±10% 無着色±20% 橙±0.05% 緑±0.5% 青±0.25% 紫±0.1% [13] (※文責:五十嵐彩乃)
3.13
はんだ付け
作業手順として以下の順で行うのが良いはんだ付けのやり方である. 1.接合する部分の錆,油脂などを取り除く. 2.接合する部分をはんだごてで加熱する(ただし,チップ部分の場合は電極にこて先を接触させて はならない). 3.加熱した部分にはんだを軽く押し付け,溶融する. 4.適切な量のはんだが付着したら,はんだとはんだごてを接合部分から静かに離す. プリント基板におけるはんだ付けでは,部品のリード線と基板の銅箔面に自然にはんだが流れ込 み,光沢を有する富士山のような形状を作るとよいとされている[16]. (※文責:岸本弘太)第
4
章
グループ内のインターワーキング
4.1
制作物
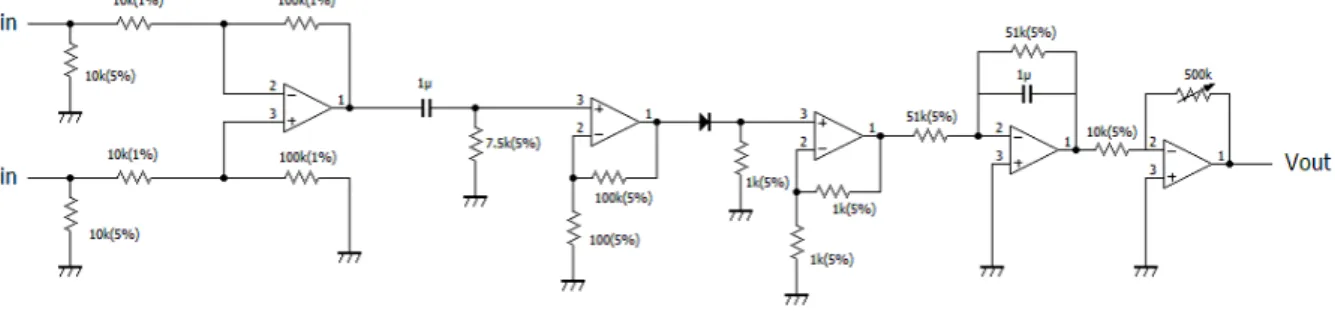
筋電位計測回路 中間発表では,図4.1の回路を用いた.この設計図が図4.2である.この回路を5チャンネル分 製作した(図4.3).まずインスツルメンテーションアンプで100倍に信号を増幅し,同相ノイズを 除去した.抵抗値は10kΩと100kΩの抵抗を用いた.更に,この部分の回路では他の回路で用い る抵抗よりも精度の高い抵抗を使うことにより,筋電位を信号処理する最初の段階で,混入する外 部ノイズを除去する事を可能とした.この信号を次にハイパスフィルターに通して,低い周波数の ノイズを除去した.筋電位周波数は5∼500Hz,電極のずれによって生じる周波数は10∼20Hzで あり,ここでは,抵抗値7.5kΩの抵抗と,電気容量1μFのコンデンサを用いて,カットオフ周 波数を20Hzに設定し,低周波数ノイズの除去を行った.ここまでの回路である程度のノイズを除 去した信号を,次に抵抗値100kΩと100Ωの抵抗を用いて非反転増幅回路で1001倍に増幅した. そして半波整流回路で負の信号の除去を行った.ここで負の信号を除去したのは,今回の筋電義手 を制御する為のマイコンであるArduinoが負の値を読み取らず、正の値のみ読み取るからである. 再び,抵抗値1kΩの抵抗を用いて非反転増幅回路で信号を2倍に増幅させ,インピーダンス変換 を行った.次に,抵抗値51kΩの抵抗と電気容量1μFのコンデンサを用いて積分回路で波形を 滑らかにし,義手を動かすためのサーボモータの滑らかな動作を可能とした.また,抵抗値・電気 容量から時定数は51ミリ秒となるが,筋電義手の動作に大きな影響がなかった為この値に定めた. 最 後 に ,抵 抗 値10kΩ の 抵 抗 と500kΩ の 可 変 抵 抗 で 反 転 増 幅 回 路 を 用 い て 積 算 回 路 で 負 の 値 と なった信号を正に戻して増幅を行った.ここで可変抵抗を用いることにより,被験者によって強さ の異なる筋電を,0∼50倍に調整して増幅した.また,筋電義手を制御する際に出力値によって動 作の識別を可能となる. 最終発表では,図4.4の回路を用いた.この設計図が図4.5である.この回路を16チャンネル 分に増やし,製作した(図4.6).中間発表から大きく変わった点は半波整流回路が全波整流回路に なった点である.中間発表時に半波整流回路を利用したのは,回路にダイオードを1つ組み込むだ けで半波となり,製作が簡単であった為である.しかし,最終発表までの問題として,計測した筋 電位の負の値をカットしてしまうことにより,筋電義手を動かす為の情報が減ってしまうという 事が挙げられた.そこで回路は複雑になってしまうが,計測した筋電義手全ての情報を利用する為 に,半波整流回路から全波整流回路に組み替えて計測を行うことにした.その他の回路部分は中間 発表時と基本変わらなかった. (※文責:坂本勝成)図4.1 中間発表で使用した筋電位計測回路
図4.2 中間設計図
図4.4 最終発表で使用した筋電位計測回路
圧力センサ用回路 図4.7の圧力センサ用回路を製作した.ニッタ株式会社製のFlexiForceを用い,反転増幅回路 に組み込んだ.積分回路において,51kΩの抵抗と1μFのコンデンサを用いた.この積分回路の 時定数は,51msであり,応答速度に問題はなかった.図4.8に実際に製作した圧力センサ用回路 を示す.[13] ひずみゲージ用回路 図4.10のひずみゲージ用回路を製作した.共和電業製のKFG-2-350-C1-11を用いた. KFG-2-350-C1-11を貼り付ける材料には,金属の中では比較的柔らかいアルミ板を用いた. KFG-2-350-C1-11をアルミ板に接着剤で貼り付けたものをひずみ計測器とした.製作したひずみ計測器(図 4.9)をホイートストンブリッジ回路に組み込んだ.ホイートストンブリッジに供給される電圧を 5Vとし,差動増幅回路に入力した.ホイートストンブリッジには,360Ωの抵抗を用いた.これ は ,力 が 加 え ら れ た と き のKFG-2-350-C1-11の 抵 抗 の 変 化 が360Ω 前 後 で あ る た め で あ る .ま た,100Ωの可変抵抗と300Ωの抵抗を組み合わせて,300から400Ωまで調整できるようにした. これによって,基準の電位を調節し,マイコンで信号を扱えるようになった.非反転増幅回路にお いて,100kΩの可変抵抗を用い,信号の増幅率を1から101倍まで調節できるようにした.ロー パスフィルターにおいて,50Hzのハムノイズの影響を軽減するため,カットオフ周波数を40Hz とした.カットオフ周波数を40Hz,コンデンサを1μFとして,抵抗の定数を求めると,3.9kΩ となった.ボルテージフォロワにおいて,信号がローパスフィルターを通過した後と,半波整流回 路を通過した後に減衰するのを防いだ.図4.11に実際に製作したひずみゲージ用回路を示す.[13] コネクタ回路 コネクタ回路を製作した.モータを4個分接続できるようにオスのコネクタを3ピンで1個と し,それを4個取り付けた.各12本のピンに被服銅線を繋いだ.被服銅線を基板に固定するため に,被服銅線を基板の表側から裏側へ通した.その際,基板の穴をドリルで広げ,被服銅線が通る ようにした.6ピンの電源スイッチをコネクタ回路の基板上に取り付た.6ピンのうち2ピンから 銅線を用いてコネクタ回路のプラスとグラウンドの端子まで引き伸ばした.また,他の2ピンと電 池ホルダーのプラスとグラウンドの端子を繋いだ.残りの2ピンは独立させた.スイッチを入れる と,電源ソケットの電池とコネクタ回路が接続されるようにした.一方,スイッチを切ると,電源 ソケットの電池と独立したピンが接続され,コネクタ回路が切断されるようにした.被服銅線や銅 線をはんだ付けした部分が取れないようにするため,接着剤を塗付し補強した.[9] OP07 OP07 51 kΩ 1 µF 51 kΩ 510 kΩ +5V out 圧力センサ
図4.8 圧力センサ用回路 図4.9 ひずみ計測器 300 Ω 100 Ω OP07 OP07 OP07 OP07 OP07 100 kΩ 100 kΩ 1 kΩ 10 kΩ 10 kΩ 100 kΩ 1 kΩ 100 kΩ 3.9 kΩ 1 µF 1 kΩ out ひずみゲージ
生体信号計測班発表スライド 生体信号計測班の発表スライドを合計13枚製作した. 生体信号計測班 筋電位計測から筋電義手が動作するまでの流れのうち,生体信号計測班が担う部分を示した. 表面筋電位計測における問題点 表面筋電位が微弱であること,皮膚が高いインピーダンスを持つこと,50Hzの誘導ノイズ の影響を受けることの3つの問題について説明した. 導電布 腕に導電布を装着しているときの写真を示した.導電布の構造や役割について説明した. アクティブ電極 電極の写真を示し,オペアンプや銀板で構成されていることを説明した.接着剤を塗布して 完成させた電極の写真を示した. 全体の回路図 筋電位計測回路の全体図を示した.前期プロジェクトで,半波整流回路だった部分を,後期 プロジェクトでは,全波整流回路に変更した. 差動増幅回路 差動増幅回路の回路図を示した.同相ノイズの除去について説明した. ハイパスフィルター ハイパスフィルターの回路図を示した.筋電位周波数,電極のズレによる周波数,カットオ フ周波数を示し,電極のズレによって発生するノイズを除去することを説明した. 全波整流回路 全波整流回路の回路図と非反転増幅回路を通過した後,全波整流回路を通過した後の筋電位 波形の様子の写真を示した. 積分回路 積分回路の回路図と積分回路を通過した後の筋電位波形の様子の写真を示した. 増幅回路 反転増幅回路の回路図と反転増幅回路を通過した後の筋電位波形の様子の写真を示した. 実際に制作した回路 前期プロジェクトでは,5ch回路,後期プロジェクトでは,16ch回路,圧力センサ用回路, ひずみゲージ用回路の写真を示した.[11] (※文責:五十嵐彩乃)
4.1.1
中間発表での製作物
筋電位計測回路5チャンネル分,筋電位の計測に必要なアクティブ電極10本+予備5本,電源 用回路2個である. (※文責:坂本勝成)4.1.2
最終発表での製作物
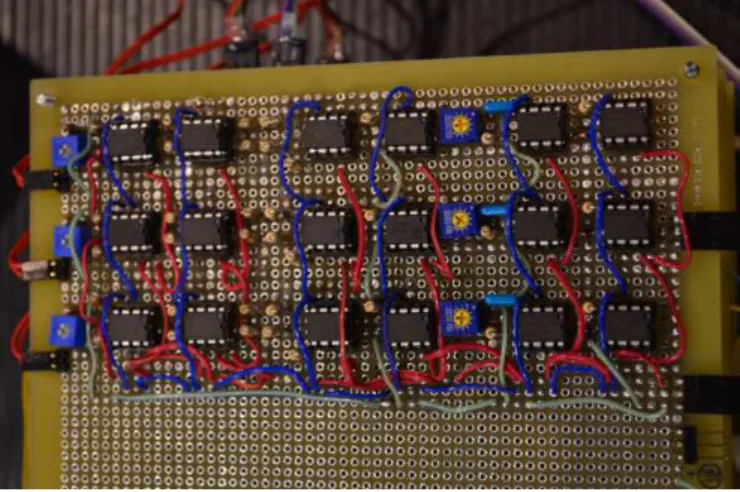
筋電位計測回路16チャンネル分,筋電位の計測に必要なアクティブ電極32本+予備18本,筋 電用フォトカプラ回路,モータ回路(モータ8個分),ひずみゲージ用回路を製作した.製作した 16チャンネル分の筋電位計測用回路は,7チャンネル・7チャンネル・2チャンネルで3枚の基板 に製作しスペーサで3段にした(図4.12).そして,筋電位計測回路のあとに新たにフォトカプラ をつけた.フォトカプラを付けることにより生体信号計測回路と主電源を切り離す役割をもってお り,ノイズを減らすことに役立つ.また,計測回路の電源は電池を利用して低電圧源としており, 危険を避けることができる. (※文責:坂本勝成) 図4.12 最終的に完成した回路使用した材料
1 オペアンプ
図4.13 OP07
図4.14 OP07の構造
図4.17 HCNR201
![図 3.17 回路(表) 図 3.18 回路(裏) これらの部品を回路の設計図通りに組み立てると DC5V 電源ができる.スイッチング制御電源 と比べ,電力損失は多くなるが,電源リプルやノイズが少なくて安定性が高い.また,回路面積も 小さくて低価格である等,優位な点が多いため小電力回路の電源として多用されている.三端子レ ギュレータは IC にコンデンサーを 2 つ付けるだけで精度も高く各種保護回路もついている電源が 手軽に作れるので多用される. [13]](https://thumb-ap.123doks.com/thumbv2/123deta/5688588.513928/28.892.256.628.139.349/図通り組み立てるスイッチング三端子レギュレータコンデンサー.webp)

![On the Diffraction ]Enhancement o f Symmetry for Two.Layer Structures By Ryoichi SADANAGA,*) Kazumasa OnsuMI,*> and Takeo MATSUM0T0* (Comm. by Tei-ichi ITo, M. J. A., Oct. 12, 1973)](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)