Title
サイリスタによる二相サーボモータのオンオフ制御の一
方式について
Author(s)
親盛, 克治
Citation
琉球大学理工学部紀要. 工学篇 = Bulletin of Science &
Engineering Division, University of the Ryukyus.
Engineering(3): 185-209
Issue Date
1960-07
URL
http://hdl.handle.net/20.500.12000/23987
185
サ イ リス タによ る二相 サ ー ボモ ー タの
オ ンオフ制 御 の一方 式 につ いて
i
*
親
盛
克
治
On theOneSystem oftheTwoIPhaseServo-Motor On-OffControlby theThyristor
Katsuji,OYAMORI
Aservo-mot('rasanelementofautoTm tiecontr()isystem .・eqult・eS冒(…d t,=iL m L・、,
hutitismoreimporLanH ohaveafastresponsetOLlninl,ulslgnとll・
'llhispaperdiscribestheco一一.binationalcircuitofthyrist()randflip-flopILIT-A 。=-Ofl controlservomotorbythethyristorthatinserted tothee(,ntrolphdSe・ rill-c thVIl.L<t川 ・
iscontrolcdbyPulsethatorlglnatedfrom thesatur【lblere(1etOr1
0utlineofLhcr,aPerisasfo一low,
1・ ドrom theeqlllVLllentcircuito‖-dlf-wavePush-pullcircuit,the(,L,tim 一一一1eLi(】intz
capilelty(,fcontrolphilSehasbeenealculと1tedandcornparedwiththecxpe.・ln.entS・ 2・ rJXPeriments on full-wave pusl一一pullcircuithLlS been performed く1-1dLl CirLujt
improvert-enthasbeendicussed・
3.(こく川-Parison ofexperiments ofboth h(ュlf-wave and fulトwdVe eirLultS htlS1-e(.n
done,an(IdiscussionwasglVenOntheexperlmerltS.
緒 言 自動制御系の一要素 と して, その操作部 に用 い られ るサーボモー タは,効率の良 い事 ものぞ ま しいがそれ よ りもむ しろ入 力信号 に対 して,出力が如何 に正確 に且つ速 かに追従 す るか とい うことが重要で あ る。 信号 を正確且つ速 かに伝 えるには,信号 の変化 に応 じて急激 を加減速 が可能 で か †れば な ら か 、.従 って次 の要求 をみたす必要 がある
。 1
)起動 トル クが大 きい。2
)回転子慣性 が小 さ い。3)正逆運転 が可能 で あるO更 に汎用 三相誘導電動機 と異 なる点 は,速度- トル ク特性 が 低速度 において,三相誘 導電動機 が正 の傾 きをもつ の に対 して, 二相 サーボモー タは負の傾 き をもつ ことで ある。 二相 サーボモー タにこの特性 をもたせ るため に,汎用 三相誘導電動機 に比べ, その 二次抵抗 値 を大 きくす る。又制御巻線 開放時 の二相 サーボモー タは,単相電動機 とな り単相運 転 をす ろ ことがあるので, これ を防 ぐため にも二次抵抗値 を大 きくして制動 を きかせ る。 本稿 で は,サ イ リス タとフ リップフロ ップ回路 (以下FF
回路 と記す)を組合 わせ ,可飽和 リ 7ク トルによ り発生す るパ ルスの オ ン・オフによ り,制御相 に直列 に挿入 したサ イリスタの オ ン ・オフを行 い,サ ーボモー タの正 逆転 を行 うもので あ る。本稿 の概略 は, 1)芋
波 プ ソシニ プ ル回路 によ りサーボモ ー タを駆動 す る場 合, その等価 回路 によ り進相容量 の最適値 を求 め、美
験値 との比較 を行 った。 2)全波 プ ッシュプル回路 による特性 を実験的 に求 め,且つ回路の改 I受 付 1969年10月31日 ※琉 球 大学理 工学部電 気 工学科186 親盛 :サイリスタによる二相サーボモータのオン・オフ制御の一方式について 良 に触 れた
。3
)半波及び全波 プ ッシュプル回路で駆動 した場合の諸特性の実験結果の比較 と 考察 を行 った。1.
半波電圧駆動特性
1・1 枚 要 タイ リス タの素子数 を減 らす ことは,回路の事故率の低下, コス トの低減 とい う点で有効で ある。 こ ゝでサ イリス タとFF回路 を組合 わ した半波 プ ッシュプル回路 を考 え,単相電 源 よ りコ ンデ ンサ分相法 によるサーボモー タの オ ン ・オフ駆動 を行 う。 コンデ ンサ分相法の場合, 1)励磁相進相, 2)制御相進相 の両方式 いず れで も可能 で あるが,本稿では次の理 由で 2) の方式 を用 いた。1
)無負荷時起動制御電圧 が小 さくてすむ。2
)サ イ リス タによる半波整流 のため,制御巻線への直流分の流入 を阻止で きる。直流分 が流 入 した場合 は, a)制石巻線 内の温度上昇の要因 となる。 b)直流分 と交流分の合成磁 界のた め,回転子 が電 源園波数の微 小振動 をす る。 をどのため好 ま しくない。 1・2 回 路構成Dl
●
V
c
a
●
Vc
b
D2
Th
yl
Nc
Th
y
2
1
2
R2●
RclN2
TRD
C
I
T
h
Rbl
Rb2
l CI C2 T l J J l Rc2L
一 _
Rl J3 i B
4
R2A
琉球大学理工学部紀要 (工学篇) サ イ リス タと半波 プ ッシュプル回路 を組合 わ した半波 プ ッシュプル回路 をfig.1・
1
に示 す。 サ イ リス タはFF
回路 の オ ンの期 間 に,可飽 和 リア ク トル によ り生ず るパ ルスで点弧 す る。点弧 回路 として可飽 和 リア ク トル を用 い る と,FF
回路 と飽 和 リア リク トル駆動電 源(
Ae)
,
.
が 絶縁 で きるので好都合で ある。 1・
3 サ イ リスタ点弧 回路 1・
3・
1 サ イ リス タゲー ト回路の条件 ゲー ト回路 は,サ イ リス タを所望 の時期 に点弧 させ るための,正 のゲー ト電 流 を供給 す るも ので ある。従 って電 源電圧 の変動等 によって,サ イ リス タゲー ト入 力が過 少 で点弧不能 になっ た り,逆 にゲー トへ の入 力過 大で破 損 した りす ることが か 1よ うにすべ きで ある。 2) 1・
3・
2サ イ リス タ点弧方式 サ イ リス タの点弧方式 には,1)可飽 和 リア ク トル によ る方法 ,2)単接合 トランジス タに よる方法 ,3)エサキ ダイオー ドによる方法 等 が代 表的 なもの と して あげ られ るが, その他種 々の方式 が ある。本稿 で は1
)の方 式 を用 いた。 これはFF
回路 との組 合 わせで,FF
回路 と交 流電 源 が絶縁で きる利 点 がある。 1・
3・
3可飽和 リア ク トル に よるパル ス 可飽和 リアク トルの飽 和角 αは式 (1・4)3)で与 え られ る。 Vg-Rio +N)d4 /dt i0-0と して Nld≠/dt-vf
vgsinwt 磁心飽和 角 をα, 飽 和 磁束 を′α ¢Sとす ると, A¢-JTvg/NIWJ。 Sinede-v
gVg/N.W〔1-
COSα〕≦2Q s ∴ α-2sinG7
,fNI
¢ S/Vg 写真1
・1
はVg-5 (Ⅴ)の場 合 の二次電圧 波形 を示 す。(1
・1)
(1・2) (1・3) (1・4)Photo.1_1Pulsewave-form
1とi8 親盛 :サ イリスタによる二相サーボモー タのオン .オフ制御の一一・方式 につ いて
1・4 二相 サーボモー タ等価 回路1'
Fig・i-2 Two-phaseservo-motorcircuit
-.f‖サ ー ホ モ - 夕はfig.1・2の よ うに示 され る。磁狛 r_,1路 の,L ミア ンス を等 しい と仮 定 す
ると
ie/i(:-Nc/Ne=-a
(1I5)
嵩 :Z;霊
但し
zZce≡rr.Ice二,fxx:ce (1.6) lT-'Jll逆相の'l''・徐f二相電 流 に分解 して, Ie-工ef+Ieb ic-icf+i。b-)/
a
()。f」 。b) ief-X
(ie-jalc) icb-X
(ie+lalc)Ee-Ee一+Eeb-1efZf+IebZb
Ec-ja (Eef一Eeb)-ja (iefZf一王eb乏b) Ve-IeZe+IerZf+IebZb
-ie
l
之e+x (乏卜h2b)-lalc iX (
之f-
2b)) 寸C-ic之C+jai
X
(iel aic)〉乏f-ja iX (ie+jaic)i乏b 寸e- (えe+乏A)ie-lalcZB
-Jt'C/a
-
2BIe-jaic (乏C/a2 +2A)琉球大学理工学部紀要 (工学篇)
a)Co
m
ponentofpositive-Phase b)Componentofnegative-phaseSequenCe Sequence
Fig・ト 3 Positiveandnegative-phaseimpedanceofservo-motor
fig.1・3より Z≠ (r/ 1-V+jxっ) Z≠ (r
l
/ 1+V+)・,x2)Zf
-r/ 卜 V+jx2+Z≠' ーU
r/ 1+V+ix2+Z≠ 一般 にZ打 ま極 めて大 きいので, 2f-r/ 1--W+,'x2, 2b-r/ 1+V+'・チ2 zAj B-X
H Zf+Zb)- (之
f-
Zb)〉-
Zb-r3/ 1+ V+jxi(
1・1
2
)
(1・13) -x (r/ 1-V+Jx2-r/ 1+V-jx2)-
V/ 1-V2・r2 (1・14) 式 (1・14)よりfig.1・4の等価回路 を得 る。a :
1
Fig・ト 4 Two-phaseservo-InOtOrequlValent
190 親盛 :サイリスタによる二相サーボモータのオン・オフ制御の一方式について
1・5
分相用 コンデ ンサの最適容量 コ ンデ ンサの容量 は,回転子 拘束時 に両巻線電圧 に7
T/
2の位相差 を生ず るよ うに選ぶ。モ ー タイ ンピー ダンスは,回転子速度 によ り変化す るので,回転時 にはモー タ端子電圧 及び位相 は拘束 時 と異 なる。制 御巻線 は直列共振 回路 をを してい るので,制御巻線 端 に現 われる電圧 は 印加電圧 よ り高 くなる。 コ ンデ ンサの最適 容量 を求 め るため に,励磁相電圧Ve-100 (V) (全波) に保 ち,制御相 印加電圧 をパ ラメー タと し容量C可 変 によ る無負荷速度 及 び拘束 トル クを求 め るとfig.1・5 -fig.1・8に示す よ うにC-4 (〟F)で両者共最大値 を示す。 これは両村 に正弦全波電圧 を印加 した場 合 の最大値 と同 じある。1
.
6
NV
e
=
1
0
0
k
k /:
三
、
(
r
.
p
.
S
)
●/●
、\
●
●
v
c
-2
0(
V
)
ov
c
-
4
0(
V)
×Vと-6
0(
V)
ve-100 (V) C (〃F) 2 34
5
Fig.115 Noloadspeedcharacteristic curve(half-wavevoltage) Note:Ve;Excitingwindingvoltage Vc:Controlwindingvoltage
琉球大学理工学部紀要 (工学者) 100
8
0
60
402
0
'T
g・s
cm)Ve
=1
:0
j YL y- k\ ×/
/
。
/〇
一。
-
。\ .。
/
0
/
●
/ ■
一 ●
- ●
→
-・
.
ノ ●
二
V。
=2
。(
V)
○ "
40 (V) × ′′ 6
0 (
V) C (
〃F)
2
3 45
Fig・1-6 Locktorque(half-wavevoltage)
○
x
′
"
′
4
6
0
0
V
V
C (
〃F)
2
34
5
Fig・1-7 Noloadspeedcharacteristic curve(full-wavevoltage)
192 親盛 :サ イ リス タによる二相サーボモー タのオ ン ・オフ制御 の一方式 につ いて
Ts
(g.cm) Ve-100 (V) RD-50 ● vc-20 (Ⅴ) :- へ - --○
〝 40 (V) /≠/
〇、 〇\ o●
/ ●
′ ●、 -●C
(〃F) 34
Fig・1-8 Lockto叩 le(full-wavevoltage)
写真 1・ 2- 1・4に示す よ うに, コンデ ンサ容量不適 の場合 は,制御巻線電流 に高調波分
Photo.ト 2 Control'windingcurrent
琉球大学理工学部紀要 (工学篇)
Photo'.1
-
3
Controlwindingcurrent I waveform (C-3F) 拘束時 の南柏 イ ンピー ダ ンス よ り,C
の最適値 を求 め,実験値 との比較 を行 う。 220n j21n j21r) a)Excitingphase 160r) j17g〕 j17。 193 o r b)Controlphase Fig・1-9 Excitingandcontrolphaseequivalentcircuit(rotorlocked)194
Z2e=
親盛 :サ イ リス タによる二相サ-ポモー タのオ ン ・オフ制御の一方式について
j686 (1414+j
2
1
)
1
41
4
+j
(686+ j21)
Ze-Z'e+Z2e-487+j574ァe=ta註賢 一-48・4
。
Z2C j550 (1131+j17) 1131+ラ(550+j17) Zc-Z.C+Z2C-373+j490 pc-7T/219e-41.6o
tan41.60==0.879 --268+ j553 -213+j473 Xc-490 373 xc-783∴C
-1/27rfxc-4.06 (JLF) 上記計算結果 よ り,実験値 と計算値 がほ ;-一致す ることが確 かめ られるo l・6 直流分流抵抗RDの年封生に及 ぼす影響 1・6 ・1 無負荷速度 に及ぼす影響 TIT_Yt -j789 160 j17 j17Fi六・ll10 Equivalentcircuitofcontrolphase
制御相等価 回路 をfig.1・10に示す。全 図 において,RD挿入のため回転子 の任意速度
V(
V-N/NsN;
回転子速度,Ns;
同期速度 ) において,励磁相側 か ら速度電圧V
l)が誘起 され る. 無負荷時 におけるVPは式 (1・15)4'鞍 与 えられ る。 Vp-aVe.Q/ 〔 1 r2(rte+x+ ) xIつ ・旦吐XI 一号
-ii
㌍ 一旦∬ l吐 一号
-1i
琉球大学理工学部紀要 (工学者)
+
i
X
・
e
/ r,i v2 -ji
r
.
e
/r
日V
リ
(
1・1
5
)
式 (1・1
5
)
に回路定数 を与 えVvを求 め ると式 (1・1
6
)
を得 る.vv-a
Vev/(2.
7
5+0.
0
1
5
V2) +i (
0.
5
5-0.
5
V2) (1・1
6
)
VvはCの充放電 を助 ける向 きに働 き,従 ってサ イ リス タオフ時 のVcの負 の半 サ イ クルで は, Vt1によ りCが充電 されNcへの流入電 流 は写真1I4に示 す よ うにVcの1サ イ クルで純正弦 波 に近 い交流 とな りfig.1・4
の年価 回路 が適用 で きる。 、 引 d. N i.I ./ ●.
/
.
/
V
e
-
looI(V) + RD-500 (n) ○ 〝 250(∩) x ∼ 100 (fl) △ ′′ 50(fl) vc(V) 20 40 60 Fig・1-l
l Noloadspeedcharacteristic curve(half-wavevoltage)RDをパ ラメー タと し,Vc可 変 によ る無負荷速度 をfig.
1・
11に示す。fig.1・
11か ら明 らか なよ うに,RDを増せ ばVc負 の半 サ イクルにおける電流 の減少 とな り,回転速度 を減 少せ しめ る。Roの値 はサ イ リス タの電流容量 によ り制 限 を うけるが,制御相 力率 が100(0/a) に近 くな るよ うな値 がのぞ ま しい。Igt) 親盛 :サイリスタによる二相サーボモータのオン・オフ制御の一方式について
1・6 ・2 RDの負荷 トル クに及 ぼす影響
0.4 0.8 1.2
Fig・ll12 Speed-torquecharacteristic curve(half-wavevoltage) た-Vc/Ve-0.4の場 合,RDをパ ラメー タと した速度- トル ク特性 をfig.1・12に示すo 1・6 ・3 RDの拘 束 トル クへの影響 RDをパ ラメー タと し,Vc可 変 によ る拘束 トル クをfig.1・13に示す。無負荷 回転時及び拘 束時 のRD端 波形 を写真1・5- 1・6に示す.Vc負の半サ イクルにおけるVtlによる電流 が顕 著 に現 われて い る。
琉球大学理工学部紀要 (工学篇)
Fig.1-13 Locktorque(half-wavevoltage)
Photo.1-'5'Rdteminalvoltage(Nolead)
198 親盛 :サ イ リス タによる二相サーボモー タの オン ・オフ制御 の一方式 につ いて
Photo・1-6Rdtermina'lvoltage(rotorlocked)
2.
全波 電圧駆動 回路
2 ・1 概 要 サ イ リス タ二個 を逆並列 に接続 し,全 波電圧 でサーボモー タを駆動 す る回路 を考案 し,これに よる駆動特性 と半波電圧 での駆動特性 の比較 を行 う。逆並 列時 のサ イ リス タの点弧方法 として 次の二種 を用 いた。 1)サイ リス タ 1, 2と直列 に磁心 を挿入, との二次パルスによ りサ イリ リス タ1′
,2′を点弧 す る。 2)可飽和 リアク トル (SR'J)の二次側 にSR2, SR,を直列 に接 続 し, その二次パルスによ りサ イ リス タ1
′,2
′を点弧す る。2・2
回路構成 2・2・1 サ イリスタと直列 に磁 心 を挿 入 した点弧方式Vc
a
Vc
b
亡ヽ
●
N
3
.
D
l
●
N
2Thy1
SR
●ND5
24Th
y
.
l' C
V
Nc
だ ノ
R
Thy
2'
N4′
D
Thy2 N′
SR3
6
●
●
D
3
21
2
ふ♭
FF回路
琉球大学理工学部紀要 (工学篇)
fig・2・1にその回路 を示 す。同図 にお けるRは制 御相 力率改善 の ため附加 した。即 ちサ イ リ ス タ 1,2の オ ン ・オフ期 間 は,写鼻 2・1- 2・4に示 す よ うにRの値 によ り異 な り,刺
Photo・2-1 ThyrlStOrCuTentwave・form (Rd-50()
photo・2 2
町
i(siodr_C;irSe.nt(W)aVeformPhoto.2-3 Saturablereactor(SR )pulse
(Rd-50())
200 親盛 :サ イ リス タによる二相サーボモー タの オ ン ・オフ制御 の一方式 につ いて
Photo.2-4 Sattlrablereactor(SIR )pu'lse (Rd-1450())
御 相電圧
Vc
との位相づ れ を生 じ,その結果 サ イ リス タ1′
,2
′が点弧不能 となる場合 がある。 (Rの値 が大 きす ぎると点弧不能 がお きる。)fig.2・1
の回路 による無負荷時及拘束時の制御 相全入 力 に対す る各部 損失及 びその百分比 をfig・2・2- 2・3に示す。実測 の結果無負荷運 WnHul_相川U 0 wc %∴
-ノ
/ ○/
。
、
/
′
㌍
_
●
r
嘉
耳、各ミま二 三二
や ‥えご
三
/
`
V。 (V)●
20 40 60-Fig・2-2 NoloadcontrolphasiI●nput (full-wavevoltage)
Note;Wco;Controlphasefullinput A;Resistor(Rp)loss(罪)
.B;Thyristorloss(罪)
琉球大学理工学部紀要 (工学 篇) loo 80 Wco(WJ %
○
--
0
-0
-
0
-
0
-● A (%) × B △ C ● Wco(W)ー
A
・
・
一
一
d
_
_
_
_
4
-
-
一
年
/
:
r
一
大
一
人
-
x
-
x
一
一x 20 40 60 vc(V) Fig・2-3 ControlphaseInputWhenrotorlocked(fulトwavevoltage)
運転時 において
,R
内絹矢が8
0
(%),サ イリス タ内損失1
2
(%),制御相入力は僅 か8
(%) である。又拘束時 においてはR
内規失8
2
(%),サイリスタ内損失1
2
(%),制御相入力は6
(%)である。上述のよ うに,R
附加のため効率が著 しく低下する。 2・2・2 可飽和 リアク トルの直列接続 による点弧方式 /でヽ.
N
4 T hy 1.
l
V
e ワca .V
C )cbTh
y
2
●
Ni
2L
+N
c LlSR
・'N 3N
Th
yl
' C
T
Thy
2
'
●
N
;
1
2
o
h
FF回路
SRI
Fig.2-4 Full-wavepush-pullmotordrivecircuit(takeoffA)
「 202 親 盛 :サ イ リス タによ る二相 サ ー ボモ ー タの オ ン ・オ フ制 御 の一方 式 につ いて 〔註〕SR.;スーパ ー ス ロ イ (0.5×10×25×35mm) Nl-N2-N。′-1
0
0
(T) sR2;スーパ ーマ ロイ (0.5×10×25×35mm) N3-10
0
(T) N4-150 (T) sR,;スーパ ーマ ロ イ (0.5×10×25×35mm) N。′-10
0
(T) N4′-150 (T)f
i
g.
2
・4
にその回路 を示 し,磁 心飽 和負α及 びパ ル ス高 さの実測値 ,計算値 を表2
・1
に 示す。SRlの二次側 にSR2及 びSR3を直列 に接続 し,SR、の二次 パ スル を駆動 源 と して,SR2, sR3を励磁 しその二次 パ ルス によ りサ イ リス タ1′
,2′を点弧 す る。サ イ リス タの通電 角 を増 す ため に,点弧 パ ルス巾 は小 さい こ とがの ぞ ま しく且つ 点弧 に必要 な充分 を電流 を供 給す る必 要 が ある。Vg-5 (Ⅴ)にお けるSRl,SR2, の -次 パ ルス及びサ イ リス タ両 端波形 を写真2
・5-2
・8
に示す。Photo.2-5 Saturablereactor(SR )pulse andcontrolvoltage
Photo・2-6 Saturablereactor(SR )pvlse andcontrd voltage
琉球大学理工学部紀要 (工学篇)
Photo.
2
-7Thyristorvoltagewavefor血Photo・2-8 Thyristorvoltagewaveform (whentakeoffR) 3.
3.
実験結果及び考察
3・1 Vc可変 による無負荷速度 制御相進相及び励磁相進相で半波及び全波電圧 で無負荷駆動 した場合 のVc-N特性 をfig. 3・●1- 3・2に示す。fig.1・1の回路 によるVc-N特性 はfig.3 ・1 (a),fig.3 ・2 (a) に示す よ うに,Vc-10 (Ⅴ)で定格速度 のほ ゝヾ90(%)に達す る。 これは回転子 の回転 によ り,速度電圧VtJが制御相 に誘起 され,且つCの充放電 を助 ける位相 にあるためで ある。又 又制御相進相 の場合,回転子 の回転時 にVcを開放 して もVv による回転 の継続, いわゆる単 相運転 の現象がある。 単相運転 を防 ぐために,fig.3・3に示す よ うにRと直列 に トラ ンジス タを挿入すれば単相運転 を防止で きる。2
0
3
204 親盛 :サイ リスタによる二相サーボモー タのオン ・オフ制御の一方式 について
1.
5
1.00.
5
N
(∫.p.S)+
- 一 ●
一 ●
一
一
一一
一
」 - ●
a +制御相進 相 ○励 磁相進 相 a/ o- ○ - bO o/E
i Oo
/
V。 (V)2
0
4
0
60
Fig・3-1 Noloadspeedcharacteristic curve(half-wavevoltage)
1.
5
1.00.
5
N
(r.p.S)t
- .
- .
- .
- .
- .
- I
0
-
-
.
-
0
/
/
/
了
二
二
・二 Vc (V)20
4
0
6
0
Fig・3-2 Noloadspeedcharacteristic curve(fulLwavevoltage)
琉球大学理工学部紀要 (工学芳)
Fig・3-3 Singlephasedrive・preventcircuit 3・2 Vc可変 による拘束 トル ク 1) 二相サーボモー タの同期 ワ ッ トトルクは式 (3 ・2)で与 えられる。 P-P/ 1′ - D2・r
,川
2+
2a=′
clI
JI
el
・cose ・r
2/1
+V
但 し
Icニーjalc v=N/Ns a-NC/Ne (3 ・2) 回路定数 を用 いた式 (3 ・2)一による計算結果 と実測値 をfig.3 ・4- 3 ・5に示す。計算値 が小 さいのは,回路定数 が近似計算 によるためや ゝ適正 を欠いたため と思 われる。 0 0 4 2 20 40 60Fig3-4 Locktorqtle(half-waveLVOltage)
206 親盛 :サイリスタによる二相サーボモ-タのオン ・オフ制御の一方式について 250 200 Ts (g・cm) ●制御進相実測値 △ 〝 (Rを除 く) × 〝計算値 ○ 励磁相進相実測値 Vc (V) 20 40 60
Fig・3-5 Locktorque(full-wavevoltage)
3・3 負荷特性 半波及び全波電圧 駆動時の負荷相 生をfig.3 ・6- 3・8に示す。半波時 トル ク50(g・cm), 20 2.0 WcoN wc(r.p-S) We (W) 10 1.0 A -鍋 - LL- ム
一・
・
A
A
l一
・
一
一
-△
▲
- A x\ ズ iiZS
・ N (r・p・S)へ
\ 、 △ wco(W) ● wc (W) o we (W) _/ ○ ___一一一一・・・・・O - ○- 〇・一一一■○ -X \ \A _/0
.
-○
f一一■一一一一一・●→ ●、●
2
0
4
0
6
0
8
0
1
0
0
Fig・316 Loadcharacteristiccurve(half-wavevoltage) Note:N;Rotorspeed(r・p・S・)
Wc;Controlphaseinput(W) We;Excitingphaseinput(W)
琉球大学理工学部紀要 (工学篇) 100 102.0 We N Wco Wc 0 40 80 120 160 200 240 Fig・3-7 Loadcharacteristiccurve
(full-wavevoltage) 10 2.0 1.6 1.2 5 0.8 0.4 40 80 120 160 200 240 Fig・3-8 Loadcharacteristiccurve
(full-wavevoltage,takeoffA)
全波時 トル ク
1
0
0
(g.αl)における効率は夫 々1
5
(%),1
5
.
8
(%)で あ り,
R
を附加 した場 合 は全波時 において5
.4 (%) と極 めて低 い。3・4
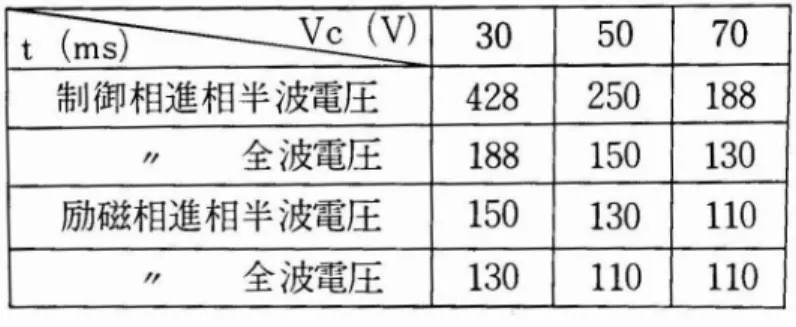
オン ・オフ時間測定 励磁相電圧 を定格値 100 (V) に保 ち,制御電圧 をパ ラメー タとして,ペ ン書 きオシロによる オン ・オフ時 間測定結果 を表3・
1に示す。 207208 親盛 :サイリスタによる二相サーボモータのオン・オフ制御の一方式について
t(
ms
)
V
c
(
V)
30
50
7
0
制御相進相半波電圧
4
2
8
25
0
1
8
8
・′
全波電圧
1
8
8
1
5
0
1
3
0
励磁相進相半波電圧
1
5
0
1
3
0
1
1
0
Table3_
i
0 n-
O
f
f
time(measurevalue)制御相進相 半波電庄 駆動 の場 合,Vcの低 い 状 態で は その極性 が変 って も,Vvによる電流 が暫時流 れ続 けオ ン ・オフ時 間 を長 くす る原 因 となる。単相運転防止回路 を附 さない場合 は, vc-20 (V)以下でVcの極性 変化後 もVv による電流 が大 きいため逆転 に至 らか ゝO 励磁相進相 に した場 合 は,Vvによる電流 は一種 の制動 力 と して作用 し, オ ン ・オフ時 間 を 短 くし,従 って速応 性 の点です ぐれて いるo二相 サーボモ ー タの機械 的時定数 は, その速度-トル ク特性 を線 形化 して考 えた場 合 ,式 (3 ・3)1) で与 えられ るo ト
音
・
忘
・
普 -
1・08×10T 4一
驚
- (S)(
3・3)
J;回転子慣性能 率 (g.cm) Nn;定格電圧 印加時 の無負荷速度 (r.p.m) Ts; 〝 起動 トル ク (g.cm) 式 (3 ・3) による計算結果 と実測 結果 を表3 ・Zに示 す。実 測
値
計 算
値
t
(
m
s)
V
c
(
Ⅴ) 30
50
70
30
5
0
7
0
制御相進相 半波電圧
76.
4 47.
6
4
0
71
.1 5
3.
9 3
6.
0
〝全 波電圧
7
6.
4 3
2.
0
24 43.1 2
6.
0 1
8.
7
励磁相進相半波電圧
44.
0 3
2.
8
3
0 23.
6 1
8.
4 1
5
.
2
琉球大学理工学部紀要 (工学篇) 209 結 言 半波及び全波プ ッシュプル回路 による二相 サーボモー タの動作特性 の実験結果次の結論 を得 る。 1) 制御相進相半波電圧 で駆動す る場合 は,直流分流抵抗附加の必要 か ら制 御相電圧 の低 い 部分で