河川整備基金助成事業
「霞ヶ浦・利根川水系におけるアライグマの分
布・定着に関する動態調査と地域生態系への影響
を最小限にした防除方法に関する試験研究」
助成番号:22–1215-011
茨城県自然博物館動物研究室
山﨑 晃司
平成 22 年度
1. はじめに
北米原産の食肉類であるアライグマは全国的な分布拡大が懸念され,在来生態系(タヌ キ,イシガメ,サンショウウオ類など)への影響,農作物被害,人畜共通感染症(アライ グマ回虫・狂犬病)の問題が指摘され,国の特定外来生物に指定されている。茨城県でも 2006 年以降に,本種の好む水辺環境である霞ヶ浦・利根川水系沿いに定着・繁殖の疑いが 強い。そのため,現地踏査,聞き取り調査などを 2007 年に実施し,その時点で県内各地 から,2000 年以降の情報として 38 件,1999 年までの情報として 4 件を得た。特に情報 が集中しており,また状況から定着繁殖が強く疑われる地域として,常陸太田市,土浦市, かすみがうら市,石岡市,古河市が特定できたが,この内,県南地域を中心に 2008 年 4 月から学術捕獲目的での箱罠の設置を,モニタリング用の赤外線センサー付きカメラの設 置と共に継続して行っている。複数のアライグマが撮影されているが,低密度のため捕獲 には非常な困難が伴い,土浦市では 1,567 トラップ・ナイト(罠を仕掛けた延べ夜数:捕 獲努力量の指標)の試みの末,オス 2 個体の捕獲という極めて高い捕獲努力量を要する結 果となった。さらに,一連の捕獲作業では在来種のタヌキなどが頻繁に罠に入り,地域生 態系への攪乱も懸念された。 そこで本研究では,水系伝いの分布域拡大の抑制と,定着地域からの根絶のため,アラ イグマの分布動態把握と共に,特に水系に着目した行動圏利用に関する研究と,在来種に 影響を与えないアライグマの効率的な捕獲手法の開発を行う。特にすでに定着繁殖を行っ ていると考えられる,県南地域のかすみがうら市および近隣市町村,また県西地域の常総 市および坂東市の一帯の 2 地域については,重点的なモニタリング対象地域として位置づ け,(1)赤外線カメラトラップおよびモニタリング用簡易ベイトトラップによる生息動向調 査,(2)かご罠およびアライグマ専用エッグトラップによる学術捕獲調査,(3)捕獲個体から の繁殖,食性,遺伝的特質に関する情報調査,(4)捕獲個体の一部に携帯電話端末利用の GPS 受信機を装着して再放逐後(避妊処理後)に行動生態調査を実施する。また以上の調 査研究と並行して,定着初期の低密度地域において,根絶を実現するための効果的な捕獲 手法の検討を行うと共に,在来種であるタヌキなどの混獲を防止するための効果的な改良 罠の開発に取り組む。 以下に,重点モニタリング地域での研究内容について詳しく述べる。 (1) 改良かご罠などによる学術捕獲調査 在来生態系への影響を最小限にするための手法を確立するために(混獲防止の観点か ら),アライグマ捕獲目的に特化した改良型箱罠(トリガー部を踏み板式から,アライグマ だけが誘因エサにアプローチできるチューブ式専用トリガーに換装する)や,アライグマ 専用罠であるエッグトラップの設置を行い,その実用性の効果の評価を行う。 (2) 捕獲個体からの繁殖,食性,遺伝的特質に関する情報調査 学術捕獲個体および有害捕獲個体の剖検を行い,メスについては子宮胎盤痕,黄体形成 などから出産履歴の検証を行う。頭骨標本作成による歯の萌出順序と頭骨縫合線の癒着程 度の検討と併せ,犬歯歯根部のセメント層切片による判読から捕獲個体の年齢構成を検討 する。同時に,胃内容物よりの食性履歴の再現,肝臓などの組織採材による遺伝分析から県内各地のアライグマの近縁関係についての分析を将来的に行うための試料の採取と保管 を行う。 (3) 捕獲個体の一部に携帯電話端末利用の GPS 受信機を装着して再放逐後(避妊処理後) に行動生態調査 学術捕獲個体の内,成獣個体については,去勢処理(オス個体)あるいは避妊用インプ ラ措置(メス個体)後に携帯電話インフラを利用した携帯端末型 GPS 送信機を首輪によ り装着して,その行動を追跡する。アライグマの行動圏利用を把握することにより,出没 情報があった場合にどの程度の範囲でのモニタリングが必要かについての検証を行うと同 時に,首輪装着個体の集中利用域にさらに罠を設置することにより,首輪装着個体以外の アライグマの効率的な捕獲を試みる。
2. 在来種の混獲防止トリガー付きアライグマ捕獲罠の有効性について
2.1 はじめに 茨城県は,2010 年 5 月に特定外来種であるアライグマの防除計画をスタートさせた. 今後,県内各市町村で本種の捕獲作業が増えることが予測されるが,その際に予想される 在来種や家畜の混獲が解決すべき問題として指摘できる(山﨑ほか 2009;山﨑・佐伯 2010). 山﨑・佐伯(2010)は,在来種や家畜の混獲を防止し,捕獲従事者の労力を軽減する目的 で,混獲防止罠の試験設置を行いその有用性を明らかにした.しかしその設置試験期間中 には,アライグマが出現せずに実際の捕獲には至らなかったために,従来広く用いられて いるかご罠と,混獲防止罠の捕獲効率の違いを検討することは出来なかった.今回,混獲 防止罠と従来のかご罠を同所的に設置して,その捕獲効率の差違について検討したので報 告する. 2.2 調査地域および期間 罠の設置を行ったのは,茨城県かすみがうら市牛渡地区の 1 箇所,かすみがうら市坂地 区の 2 箇所,茨城県坂東市矢作地区の 1 箇所の計 4 箇所である(表 1).罠の設置期間は, 2010 年 4 月から 12 月の間であるが,場所により設置期間は異なった(表 1). 2.3 調査方法 捕獲に用いた罠は,改良型の罠 1 種類と,通常型の罠 2 種類の計 3 種類である. 【改良型】 (a) 在来種混獲防止トリガー付改良アライグマ用スチールかご罠(山﨑・佐伯 2010:以下 混獲防止罠):ベース罠はアライグマ用スチール製かご罠(Havahart® #1081,Woodstream Corp., Lititz, Pennsylvania, USA:高 381mm×巾 381mm×長 1066mm) 【通常型】
(b) 野犬用スチール製かご罠(フック式:アニマルキャッチャーNo.281L 型,丸十金網(株), 大阪:高 370mm×巾 370mm×長 800mm)
(c) アライグマ用スチール製かご罠(踏み板式:Havahart® #1089, Woodstream Corp., Lititz, Pennsylvania, USA:高 315mm×巾 265mm×長 815mm)
混獲防止罠(a)は全地区(かすみがうら市牛渡の民家に 3 台 98 日間,かすみがうら市坂 の歩崎観音に 1 台 22 日間,かすみがうら市坂の落花生畑に 1 台 5 日間,坂東市矢作の光 明寺に 1 台 38 日間)に,通常型罠(b)はかすみがうら市牛渡地区(3 台 648 日間)および 坂地区(歩崎観音に 1 台 59 日間,落花生畑に 1 台 42 日間),また通常型罠(c)はかすみが うら市牛渡地区(2 台 432 日間)および坂東市矢作地区(1 台 19 日間)に設置した(表 1 参照). 罠(a)には殻付き落花生にピーナツバターを塗布したものを付けエサとして用い,さらに 誘導エサとしてスナック菓子(キャラメルコーン,(株)東ハト,東京)と殻付き落花生を 混獲防止罠の周囲および内部の床部に撒いた.罠(b)にはピーナツバターを塗布した揚げあ んパンを付けエサとして用い,罠(c)には揚げあんパンあるいは殻付き落花生を付け,スナ ック菓子を誘導エサとして用いた. 混獲防止罠の見回りと誘導エサの補充は,罠(a)および(b)については廣原と山﨑が,また 罠(c)については廣原と山﨑,あるいはかすみがうら市鳥獣保護員が毎朝行った. 混獲防止罠には,罠への動物の接近や作動状況を監視するために,赤外線センサー付き のデジタル自動撮影カメラ(Wildview Xtream STC-TGL5IR,Wildview, Texas, USA)を 罠の隣に設置した.画像記録には 2GB の SD カードを使用した.自動撮影カメラの設定は, 画質を high resolution,センサー検知範囲内に熱源が検知され続けた場合の撮影間隔は 1 分とした. 2.4 結果 それぞれの罠設置箇所での捕獲結果を表 1 に示した. アライグマの捕獲効率は,混獲防止罠で 0.00∼0.40 頭/トラップ・ナイト,通常型罠で 0.00∼0.07 頭/トラップ・ナイトであった.罠設置場所ごとに,捕獲に成功した日数と捕 獲できなかった日数を,混獲防止罠と通常型罠の間で比較すると,かすみがうら市牛渡民 家(Chi-square test, P = 0.8372),かすみがうら市坂歩崎観音(Fisher’s exact test, P = 1.0000),かすみがうら市坂落花生畑(Fisher’s exact test, P = 0.0806),坂東市矢作光 明寺(Fisher’s exact test, P = 1.0000)となった.すべての箇所において,捕獲の結果 に混獲防止罠と通常型罠の間に統計的な相違は認められなかった.
アライグマ以外の捕獲の発生については,混獲防止罠では 1 頭(タヌキ Nyctereutes
procyonoides)であったが,通常型罠では計 11 頭(タヌキ 1 頭,ハクビシンPaguma larvata
9 頭,ネコ Felis silvestris catus 1 頭)となった.ただし,かすみがうら市での通常型罠
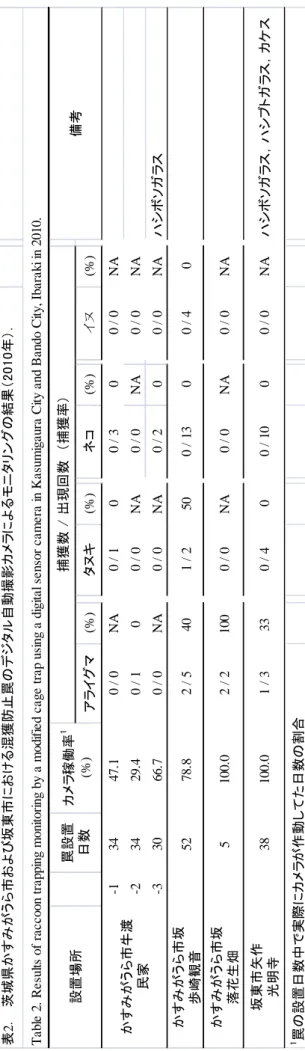
での捕獲では,ネコの混獲が複数例確認されたが,捕獲頭数に関する詳細な記録が取れず, 本論でその結果を示すことは出来なかった. デジタル自動撮影カメラによる混獲防止罠のモニタリング結果を表 2 に示した.原因は 不明であるが,デジタル自動撮影カメラの赤外線センサーの過反応などにより,予想され る稼働時間よりも電池が早く消耗したり,記録用 SD カードが一杯になる場合があり,罠 の設置日数に対するカメラの稼働割合は 29∼100%とばらつきが生じた.ただし,アライ グマは,表 1 に示した捕獲個体はすべて撮影されていた.
混獲防止罠に出現して,罠に興味を持って触れたり,罠の中に入ったりした動物として
は,アライグマの他に,タヌキ,ネコ,イヌ(Canis lupus familiaris)が撮影された.しか
し,通常型罠で混獲事例があったハクビシンについては,今回は撮影されなかった.また
哺乳類ではないが,ハシボソガラス(Corvus corone),ハシブトガラス(C. macrorhynchos),
カケス(Garrulus glandarius)が撮影された.ハシボソガラスについては,かすみがうら市 牛渡の民家罠-3 において,付けエサにつながるひもを罠の外側からくわえて引っ張り,扉 を落とすのが確認された. アライグマは 6 箇所中 4 箇所の混獲防止罠に出現して,全体での捕獲成功率は 45%(5 / 11)であった(図 1).この中の 1 例では,アライグマが罠に入る前に,罠の外側から付け エサを触り,扉を落としてしまったことが確認できた.その他の事例では,出現したもの のそのまま立ち去った.タヌキは,4 箇所中 3 箇所で計 7 回出現し,その内 1 回混獲され た(14%).ネコは 6 箇所中 4 箇所で計 28 回出現したが,混獲は 1 回もなかった.イヌは かすみがうら市坂の歩崎観音の罠にのみ,小型の罠に入る大きさの品種が計 4 回出現した が,混獲は起こらなかった.全体を通じて,アライグマ以外に出現した動物の捕獲率は 2.6% (1/39)であった. 2.5 考察 今回の一連の試験による比較結果からは,混獲防止罠の捕獲効率は,これまで各地で広 く用いられてきている通常型のかご罠と差がないことが示された.さらに混獲の発生によ り,実際のトラップの稼働期間が短くなる事態を防ぐ利点もある.ただし,通常型罠は 2 タイプ共に混獲防止罠よりもサイズが小さいために,アライグマにとって心理的な入りや すさの点で不利な面があったかもしれず,この点については今後さらに検証が必要な部分 といえる. アライグマ以外の動物の混獲防止への有効性については,アライグマ以外の動物の 39 回の出現中,混獲された例はタヌキ 1 例のみであったことで示された.このタヌキが捕獲 された原因は,デジタル自動撮影カメラの画像からは特定できなかったが,すでに山﨑・ 佐伯(2010)が示唆しているように,トリガーフックの扉部へのかけ方が浅かったための 震動などによる誤作動や,何らかの理由で付けエサが塩ビパイプから一部露出してしまい, タヌキが咥えることができた可能性も考えられた.いずれにしても,これらの問題は,注 意深い罠の設置により,さらに低減できると考えられる. 混獲防止罠の誤作動は,アライグマとハシボソガラスによる事例がそれぞれ 1 例確認さ れた.どちらも,付けエサから扉のトリガーフックにつながるラインを外側から咥えて引 っ張ったためであった.この部分は現行の混獲防止罠では L 字型鉄板で覆うようにしてい るが,わずかな隙間が存在している.今後この部分の完全な被覆が求められる. 図 1. かすみがうら市坂の落花生畑に仕掛けられた混獲防止罠によるアライグマの捕 獲状況(2010 年 10 月 2 日). 上:20:19 にアライグマが罠に接近する. 下:20:20 に罠に入り捕獲された.
表 1 . 茨 城県か す み が う ら市お よ び 坂 東 市 に お け る 混 獲防止 罠と 通 常 型 か ご 罠 に よ る ア ラ イ グ マ 捕獲 試験の 結果 ( 2 0 1 0 年 ) . T a bl e 1. R e su lt s of r a c c oon tr a ppi ng by m odi fi e d c a g e t ra p s, a nd c o m m e rc ia l c a g e t ra p s i n K a su mi ga u ra C it y a n d B a ndo C it y , I b a ra k i i n 2 010. 開始 終 了 ア ラ イ グ マ タ ヌ キ ハクビ シ ン ネ コ 混獲 防止罠 (a )-1 2010/ 9/ 24 201 0/ 10/ 28 混獲 防止罠 (a )-2 2010/ 9/ 24 201 0/ 10/ 28 混獲 防止罠 (a )-3 2010/ 10/ 27 201 0/ 11/ 26 通 常型罠 (b )-1 2010/ 4/ 24 201 0/ 11/ 26 通 常型罠 (b )-2 2010/ 4/ 24 201 0/ 11/ 26 通 常型罠 (b )-3 2010/ 4/ 24 201 0/ 11/ 26 通 常型罠 (c )-1 2010/ 4/ 24 201 0/ 11/ 26 通 常型罠 (c )-2 2010/ 4/ 24 201 0/ 11/ 26 2010/ 9/ 24 2010/ 9/ 28 2010/ 10/ 1 201 0/ 10/ 19 2010/ 10/ 27 201 0/ 11/ 26 通常 型罠 (b ) 2010/ 9/ 28 201 0/ 11/ 26 59 3 1 0 不明 0. 05 2010/ 9/ 24 2010/ 9/ 27 2010/ 10/ 1 2010/ 10/ 3 通常 型罠 (b ) 2010/ 9/ 14 201 0/ 10/ 26 42 3 0 0 不明 0. 07 2010/ 11/ 5 201 0/ 11/ 28 2010/ 11/ 29 2010/ 12/ 8 2010/ 12/ 19 201 0/ 12/ 25 通常 型罠 (c ) 2010/ 11/ 19 2010/ 12/ 8 1 9 0 0 0 1 0. 00 混獲防 止罠 (a ) 混獲防 止罠 (a ) 0 0 アラ イ グ マ 捕 獲 率 (頭 / ト ラ ッ プ ナ イ ト ) 罠種類 0. 03 罠設 置期 間 98 1080 52 5 38 罠設 置日数 捕獲 数 不明 かす み が う ら 市牛 渡 民家 か す みが う ら 市坂 歩崎 観音 か す みが う ら 市坂 落花 生畑 坂東 市矢 作 光明 寺 設置 場所 20 0 0 .4 0 1 000 80 9 0 .0 1 00 0 0 .0 0 混獲防 止罠 (a ) 2 1 0 0. 04 0
表2 . 茨城県かす みがう ら 市 お よ び 坂東市にお け る 混獲防止罠のデ ジ タ ル自動撮影カ メ ラ による モ ニ タ リ ン グ の 結果( 2 0 1 0 年 ) . T a b le 2 . R e su lt s of r a c c oon t ra p pi ng m oni to ri ng by a m o d if ie d c a ge t ra p us in g a di gi ta l s e ns or c a m e ra i n K a su m iga ur a C it y a nd B a n do C it y , I b a ra k i i n 201 0. アラ イグ マ (% ) タヌ キ (% ) ネコ (% ) イヌ (% ) -1 3 4 47 .1 0 / 0 N A 0 / 1 0 0 / 3 0 0 / 0 N A -2 34 2 9 .4 0 / 1 0 0 / 0 N A 0 / 0 N A 0 / 0 N A -3 3 0 6 6 .7 0 / 0 N A 0 / 0 N A 0 / 2 0 0 / 0 N A ハシ ボ ソ ガ ラ ス かす みがう ら 市 坂 歩崎観音 5 2 7 8 .8 2 / 5 4 0 1 / 2 5 0 0 / 1 3 0 0 / 4 0 かす みがう ら 市 坂 落花生畑 5 1 0 0 .0 2 / 2 1 0 0 0 / 0 N A 0 / 0 N A 0 / 0 N A 坂東市矢作 光明寺 38 1 00. 0 1 / 3 3 3 0 / 4 0 0 / 1 0 0 0 / 0 N A ハシ ボ ソ ガ ラ ス , ハシ ブ ト ガ ラ ス , カ ケ ス 1 罠の設置日数中で 実際に カ メ ラ が作動し て た 日数の割合 備考 カ メ ラ 稼働率 1 (% ) かす みがう ら 市牛渡 民家 設置場所 捕獲数 / 出現回数 ( 捕獲率) 罠設置 日数
出現したアライグマの混獲防止罠による捕獲率は 45%にとどまった.この理由について, 現時点では実証的な情報が得られていない.今後,赤外線センサー付きのデジタルビデオ カムでモニタリングするなどして,アライグマの罠接近時の行動をさらに詳しく観察・解 析する必要がある. 今回のアライグマ捕獲試験により,混獲防止罠が従来から使われているかご罠と差がな い捕獲効率を持つこと,混獲の抑止により,在来生態系や特に人家周辺での捕獲作業の際 は,イヌやネコなどの家畜への攪乱を相当小さくすること,また捕獲従事者の罠メンテナ ンスの際の労力を軽減することが示された.混獲防止罠の作製は簡単かつ廉価であること から(山﨑・佐伯 2010),今後,アライグマの防除計画や有害捕獲で広く活用されること が望まれる. 2.6 補足・混獲防止罠の構造 在来種混獲防止用のトリガーが付いたアライグマ捕獲罠(以下混獲防止罠)は,環境省 近畿地方環境事務所(2008)を参考に作成した.改良に利用した罠は,アライグマ用スチ ール製かご罠(Havahart® #1081, Woodstream Corp., Lititz, Pennsylvania, USA; US$100(約 9,000 円))であった.改良に利用した材料および工具はすべてホームセンタ ーで購入できるもので,塩ビ管(VP#20,外径 26mm,内径 20mm;220 円/m),塩ビ管 継手(L 字型)(VP#40,外径 48mm,内径 40mm;220 円/個),ビニール被覆針金もし くは水糸,鉄板で,材料費は塩ビ管,塩ビ管継手,針金などで約 500 円であった.使用す る工具は,ニッパーと塩ビ管を切断する金鋸類および穿孔する半田ゴテまたは錐で,製作 時間は 1 台あたり 20 分程度であった.基本的な改造手順は次の通りであった.(1) 踏み板 式のトリガーを解除するために,踏み板と罠扉を支えるフックをつなぐ鉄棒を取り外す. (2) 罠後部側面の上方の罠網部をニッパーでカットして,5cm 四方程度の穴を開口する. (3) 開口部に塩ビ管継手を針金で固定する.(4) 開口部と罠扉を支えるフック部の間に塩ビ 管を針金で固定する.(5) 塩ビ管内部に針金あるいは水糸を通し,片方をフックに,もう 片方には落花生を付けて,塩ビ管継手内部にセットする.(6) 穴部をアライグマの手が罠 外部から入らないように薄い鉄板で覆う.
補足図 1 混獲防止罠の構造:トリガーをセットした状態.
補足図 2 混獲防止罠の誘因エサの設置部分の構造:かご罠の金網部を一部カットして, 塩ビ管継手を取り付ける.
補足図 3 混獲防止罠のトリガー誘導部分の構造:塩ビ管継手の誘因エサ部からトリガー 部に塩ビ管のガイドパイプを設置して針金を通す.
補足図 4 混獲防止罠の誘因エサ設置部分の覆いの構造:薄い金属を設置して,外部から はアライグマの手が差し込めないようにする.
3. 携帯電話 GPS 端末を利用したアライグマの行動追跡の実用性について
3.1 はじめに 野生の陸生動物の行動追跡のツールとしては,GPS を利用した首輪型システムの普及が めざましい。また,最近は GPS 測位データの転送に関して,衛星を経由した手法が確立 されており(e.g., Globalstar,Iridium,Argos 衛星など),測位データの即時性と,測位 データ取得の担保の意味合いで広く利用されている。ただし,こうした通信機能を持つシ ステムでは重量がかさむ場合が多く,中型哺乳類への適用が難しい現状がある。 佐伯ほか(2009)は,行動追跡調査のための携帯電話端末の適用について,携帯電話端 末を携帯した人間,飼いイヌ,飼いネコを利用した検討を行い,その実用の可能性を示し た。今回,携帯電話端末に増設バッテリーパックを接続した上でベルトに包埋を行い,ア ライグマ Procyon lotor 野生個体への装着を行った。目的は,中型哺乳類追跡ツールとし ての携帯電話端末の実用性を検討することである。 3.2 材料と方法 使用した携帯電話端末は,FOMA 専用端末(CTG-001G,NTT ドコモ販売,東京,以 下 CTG)であった。稼働時間増加のために,リチウムバッテリーパック(2000mAh,3.7V) を 3 個並列で接続する仕様とした。CTG とバッテリーパックを熱収縮チューブで固定した 後,食品用ラップフィルムとビニールテープでくるみ,ナイロン製ベルト(幅 38mm)に, 硬化性のグラスファイバーテープ(レクター・ハイテープ,(株)ユニテック)で固定した。 その後,グラスファイバーテープの隙間を二液性エポキシで埋めた。総重量は,215g であ った。またオスの一部について,前述の首輪システムに加えて,正確な位置を特定するた めの VHF 発信器(BioTrack 社,UK)を付け加えた。この場合の総重量は,約 300g であ った(303g,304g,288g)。CTG に内蔵された GPS アンテナ部は,首輪真下(地面側) に向くように位置した。 CTG の測位性能評価のための定置試験は,茨城県坂東市大崎の博物館に隣接する森林内 の,既知の座標ポイント上(緯度 36.00536825, 軽度 139.91719512)で行った。地上高 20cm にアライグマの首に見立てたペットボトルを三脚に固定して,2 台の CTG を,アン テナ部を 0°(天空方向)と 180°(地上部)に向けて設置した。地形は台地上の平坦地で,標高は 20m であった.植生はシラカシ Quercus myrsinifolia,イヌシデ Carpinus
tschonoskii,コナラ Quercus serrata,ヒノキChamaecyparis obtusa,ヤマザクラPrunus
Jamasakuraなどの針広混交二次林であった.座標ポイントの開空度は,魚眼レンズを装
着したデジタルカメラ(Nikon COOLPIX885+フィッシュアイコンバーターFC-E8,日本 光学,日本)で天空写真を撮影し,そのデジタルイメージを森林情報解析ソフトウェア (LIA32 for Windows95 Ver.0.373)を用いて二値化処理した後測定した.座標ポイント の開空度は 31.6%であった.定置試験で得られた測位データと,各ポイントでの実座標と の誤差計算などは,GIS ソフトウェア(ArcView3.2,ESRI 社,米国)上で行った. 野生個体への装着は,かすみがうら市坂および牛渡周辺,坂東市矢作で捕獲した個体に ついて行った。捕獲は茨城県アライグマ防除計画あるいは学術捕獲により実施した。捕獲
罠にはアライグマ混獲防止罠(山﨑ほか,印刷中)を使用し,誘引エサには殻付き落花生, ピーナッツバター,スナック菓子(キャラメルコーン)などを使用した。捕獲したアライ グマはケタミンおよびドミトールの混合液で不動化を行い,体計測,採材,CTG 装着を行 った後,アンチセダン拮抗剤を筋中に投与して放逐した。なお,防除計画実施の観点から, 放逐後の CTG 装着個体の繁殖を防止するために,オスについては去勢措置を,メスにつ いては発情抑制剤(ジース・インプラント,あすか製薬(株),東京)を背部に挿入した。 CTG による位置情報の取得は,調査者が位置検索サービス・ウェッブサイト(ロケーシ ョン(株),東京)を利用して,任意の時間,あるいは予めプログラムした定時での 2 通 りにより可能である。ただし,位置検索サービス・ウェッブサイトでは,専用地図上での 閲覧機能しかなく,緯度経度情報などをデジタルで取得することは出来ない。そこで,新 たに,CTG による位置情報を GIS などで利用可能とするためのデータダウンロード・サ ービス機能を付加した。これは FTP により位置測位の属性情報を位置検索サービス・サー バーからダウンロードするものである(e-Location/EX システムと呼ぶ)。具体的には,管 理番号,利用者 ID,端末番号(CTG 携帯電話番号),検索名称(端末 ID),日付,時間, 拠点情報,緯度・経度(10 進緯度経度,日本測地系),住所,エラー内容となる。なお位 置測位は,基本的には CTG に内蔵された GPS 受信機により行われるが,建物や地形の関 係などで GPS 衛星が捕捉できないときは,FOMA 基地局を利用した位置推定を行うため に,2 通りの測位が混在している。GPS 測位と基地局測位の区別情報は,情報を取得する NTT ドコモから今回利用した e-Location/EX システムに送られてくる時点でカットされて いるために,その峻別は不可能な仕様となっている。そこで,e-Location/EX システムで は属性情報として取得できないものの,NTT ドコモにより提供されている測位誤差情報 (m 単位で推定値を表示)を,ロケーション(株)から適時取得することにより,GPS 測 位と推定できる位置情報のカットオフを試みた。 なお,今回の CTG 首輪には脱落装置が付いていないために,当該個体が高頻度に利用 した地点での罠かけを行い,再捕獲と CTG 首輪の回収を試みた。また再捕獲後に安楽死 処分となった個体については,犬歯セメント層の染色切片を作製して年齢査定を実施した。 3.3 結果 3.3.1 定置試験 定置試験は,2010 年 5 月 19 日から 6 月 14 日の期間に実施した。位置情報測位間隔は, 1 時間に予め設定した。また,補足試験として,アライグマ装着後に回収した CTG 首輪を 同じ地点に設置して,2011 年 1 月 28 日から 2 月 5 日の期間に実施した。位置情報測位間 隔は 1 時間であった。測位結果を表 1 および図 1 に示した。 同じ時間軸で実施した No.7 および No.4 の結果では,両 CTG 共に,通信成功率は 100% で,また 50m 以内測位率も 100%となった。ただし実測された測位誤差については,アン テナ角度が 0°の No.7(12.0m, SD = 8.3, n = 141)の方が,アンテナ角度が 180°の No.4 (14.5m, SD = 10.2, n = 141)よりも少し小さい結果となった(t-test, P = 0.0281)。時期 を変えて実施された No.6 は,通信成功率が 99.5%,50m 以内率が 98.4%であった。実測 測位誤差は,全測位点では 16.5m(SD = 67.0, n = 182),また 50m 以内測位点のみの場 合は 11.6m(SD = 8.9, n = 180)となった。
写真:グラスファイバーテープで固定された CTG 首輪の外観
表 1 CT Gの定置試験結 果 全測位 SD n 5 0 m以内 SD n N o .7 0 1 0 0 14 1 1 00 14 1 1 2 .0 8 .3 141 12 .0 8. 3 141 N o .4 18 0 1 0 0 14 1 1 00 14 1 1 4 .5 10. 2 141 14 .5 10. 2 141 N o .6 18 0 9 9 .5 1 8 3 9 8 .4 18 3 1 6 .5 6 7. 0 182 11 .6 8. 9 180 n 測位誤差 (m ) CT G I D GP Sアン テ ナ 角度 通信 成功率 n5 0 m以内率
表 2 CT G首輪を 装着したア ラ イ グ マ の一覧 アラ イ グ マ個 体 性 体重 (k g ) 首囲 (mm) 齢級 年齢 1 測位開始時期 測位終了時期 CG T 稼働期間 (日) 捕獲場所 CT G 首輪重量 (g ) 体重比 (% ) 状態 KA 0 8 メス 5. 4 235 成獣 2010/ 5/ 19 2010/ 6/ 7 16. 3 かす みがう ら 市 牛 渡 215 4. 0 未回収 KA 0 5 メス 5. 8 210 成獣 2 2010/ 5/ 19 2010/ 6/ 2 11. 2 かす みがう ら 市 牛 渡 215 3. 7 捕殺 KA 0 1 オス 9. 2 270 成獣 5 2010/ 6/ 2 2010/ 6/ 15 11. 5 かす みがう ら 市 坂 215 2. 3 捕殺 KA 0 2 メス 8. 4 215 成獣 5 2010/ 6/ 2 2010/ 6/ 21 17. 2 かす みがう ら 市 坂 215 2. 6 捕殺 KA 0 3 オス 6. 3 220 成獣 4 2010/ 6/ 9 2010/ 7/ 1 20. 6 かす みがう ら 市 牛 渡 215 3. 4 捕殺 B A 07t o 0 6 オス 9. 2 270 成獣 2010/ 12/ 1 2010/ 12/ 26 23. 8 坂東市矢作 304 3. 3 再捕獲 B A 07t o 0 6 オス 9. 8 N A 成獣 2011/ 1/ 9 2011/ 1/ 27 2 25. 0 坂東市矢作 303 3. 1 交通事故死 BA 0 4 オス 8. 5 250 成獣 2011/ 2/ 9 2011/ 3/ 7 27. 3 坂東市矢作 288 3. 4 未回収 1 一部の 個体に つい て は , 犬歯根部セ メ ン ト 層 に よ る 年 齢 査定を 実施し た 2 同個体の 交通事故死後に , CT G首輪を 定置試験に 供し た た め に , 稼働期間は その 期間も 含め て 計算し た
表 3 CT G首輪 を 装着したア ラ イ グ マ の通信成 功率 アラ イ グ マ個 体 性 成功回数 % 5 0 m 以内 % n 成功回数 % 5 0 m 以内 % n 成功回数 % 5 0 m 以内 % n KA 0 8 メス 189 44. 4 3 6 8 .5 426 89 58. 6 28 18 .4 152 1 0 0 36. 5 8 2. 9 274 KA 0 5 メス 148 48. 4 7 3 23. 9 306 64 57. 7 37 33 .3 111 84 43. 1 3 6 1 8 .5 195 KA 0 1 オス 114 37. 5 1 8 5 .9 304 50 48. 1 12 11 .5 104 63 31. 7 6 3. 0 199 KA 0 2 メス 133 30. 8 4 3 10. 0 432 61 40. 7 32 21 .3 150 72 25. 5 1 1 3 .9 282 KA 0 3 オス 159 30. 8 5 8 11. 2 517 1 1 3 6 3. 1 4 4 2 4 .6 179 46 13. 6 1 4 4 .1 338 B A 07 to 06 オス 425 71. 0 162 27. 0 599 2 6 2 7 8. 7 133 39 .9 333 1 6 3 61. 3 2 9 1 0 .9 266 B A 07 to 06 オス 270 62. 1 6 9 15. 9 435 1 5 9 6 6. 5 6 1 2 5 .5 239 1 1 1 56. 6 8 4. 1 196 BA 0 4 オス 317 50. 3 105 16. 7 630 2 1 2 6 2. 4 9 4 2 7 .6 340 1 0 5 36. 0 1 1 3 .8 292 全期間 夜間 昼間
3.3.2 野生アライグマ装着試験 野生アライグマへの装着試験は,かすみがうら市域で 5 個体(メス 3 個体,オス 2 個体), また板東市域で 2 個体(オス 2 個体)の計 7 個体に,延べ 8 回実施した。装着個体と装着 期間を表 2 に示した。7 個体中 5 個体については調査終了後に再捕獲,あるいは交通事故 死などによる回収が出来た。回収された個体に装着されていた CTG 首輪に破損は認めら れなかった。グラスファイバーテープを剥がして内部を検査したところ,わずかに結露が 認められた。そのため,坂東地域での CTG 首輪については,内部にシリカゲル材を封入 した。すべての個体は成獣で,年齢査定が出来た個体の内 2 個体については 5 歳であった。 CTG 首輪重量の体重に占める割合は,すべての場合で 5%以内に収まった。 システム稼働日数は,全体では平均 19.1 日間(SD = 6.1,n = 8)であった。ただし, 初期の CTG 装着の際には,バッテリーへの充電器の充電満了表示機能に不具合があった ことがその後判明し,バッテリーがフル充電されていなかった可能性が高かった。そのた め,この点の改善を行った 2010 年 12 月以降の装着個体のみの稼働日数を見てみると,平 均 25.3 日間(SD = 1.7,n = 3)となった。しかし,計算上の稼働時間(最大 90 日間)よ りも極めて短い期間といえた。 各 CTG 装着個体の通信成功率を表 3 に示した。日の出と日の入りについては,調査地 の緯度経度から,標高 0m として算出した(http://star.gs/cgi-bin/scripts/hinodet.cgi)。 かすみがうら市での調査期間中は,4:00∼18:30 の範囲を日中として,それ以外を夜間と した。坂東市での調査期間中については,6:00∼17:30 の範囲を日中として,それ以外を 夜間とした。なお,日の出と日の入りの範囲は日により異なったために,細かな調整を行 った。全日での通信成功率は 46.9%(SD = 14.3,n = 8)であった。また夜間での成功率 (59.9%,SD = 11.5, n = 8)は,昼間での成功率(38.0%,SD = 15.6,n = 8)に比べ ると有意に高かった(t-test, P = 0.0041)。地域別では,かすみがうら市地域での通信成功 率は 38.4%(SD = 7.9, n = 5)であったのに対して,坂東市地域では 61.0%(SD = 10.4, n = 3)となり,坂東市地域の方が有意に成功率の高い結果となった(t-test, P = 0.0123)。 サーバーから直接取得したデータには,測位誤差距離(m)に関する属性データが付い ていたために,この属性が「50m 以内」となっている通信成功データについて,全体の通 信試行回数に対する取得率(以下 50m 以内測位率)も見てみた。全日での 50m 以内測位 率は,14.9%(SD = 7.5, n = 8)であった。夜間(25.3%, SD = 8.8, n = 8)と昼間(6.4%, SD = 5.5, n = 8)での比較では,夜間の方が 50m 以内成功率が有意に高い結果となった (t-test, P < 0.0001)。 3.4 考察 3.4.1 CTG 首輪の形状,仕様,稼働期間について 今回の試験運用では,グラスファイバーによる CTG の首輪ベルトへの装着と,また野 外での防水・防塵対策とした。これまでに回収された事例では,CTG 本体への損傷はなく, 強度的には問題ないものと考えられた。また初期の装着の際には,内部への結露が認めら れたが,この点については乾燥剤(シリカゲル)などの封入により影響を最小限に抑えら
れるものと想像出来た。ただし,グラスファイバーテープによる固定の場合,CTG の再利 用の際には,一度筐体を壊さないとならないことが今後の改善課題としてあげられる。リ チウム電池充電のための充電器接続端子の取り扱いも課題となろう。 CTG 首輪全体の重量は,アライグマ体重の 5%以内に押さえられたものの,可能であれ ばさらなる軽量化が望まれる。特に,本システムをタヌキ Nyctereutes procyonoides など のアライグマよりも一回り体サイズが小さな動物種に装着を試みる場合は克服しなくてな らない部分である。例えば体重 3kg のタヌキの場合には,許容される首輪重量は体重の 5% の場合で 150g までとなる。ただし現状で軽量化のための良い方策はなく,より高性能の リチウム電池の開発を待つしかない。特に VHF 発信器を組み込む場合に重量増加は深刻 となるが,位置情報システムによる測位情報のみでは,現場で実際にアライグマがどのよ うなマイクロハビタットを利用しているかの特定は困難となることが,今回の CTG 運用 で明らかになっている。 また CTG の稼働時間は,リチウムバッテリー容量や通信にかかる消費電力などによる 推定から,条件の良い場合で 90 日間程度と計算されていたが,実際には平均で 25 日間程 度と,予測稼働時間の 3 割にも満たない結果となった。これは,今回のような 1 時間測位 の場合には,その間の待機消費電流が大きくなること,また後述するように通信の成功率 が低かったために,CTG が基地局を探索するための通信消費電流が大ききなったことなど が要因として考えられた。いずれにせよ,現在の稼働時間では CTG 装着個体の追跡期間 としては不十分と考えられる。 3.4.2 CTG 首輪の測位誤差について 定置試験による測位誤差は,サーバーから直接取り出したデータのみに付加される属性 情報(推定測位誤差)の中の,“50m 以内”を利用したカットオフにより,11∼14m 程度 の範囲に収まることが示された。この精度は,アライグマサイズの動物の行動圏利用を再 現することに大きな問題を生じさせない値である。NTT ドコモにより推定値精度に関する 情報公開がされていないために,この“50m 以内”情報がどのような意味を持つかについ ては推測の域を出ないが,おそらくこの推定誤差精度の場合の測位は,基地局測位ではな く,GPS 測位によるものと考えることが妥当であろう。 また CTG では,製品の仕様上 GPS アンテナが本体に固定設置されており,首輪による 対象動物への装着を行った場合は,GPS アンテナ部が地面方向(180°)に向くとことに なる。アンテナ角度が下がる場合には,測位誤差の増大や測位成功率の低下が懸念される (Yamazaki et al. 2008)。CTG の場合には,測位成功率は通信成功率に影響されるため にアンテナ角度による影響評価は出来なかったが,測位誤差については若干増したものの (2.5m:No.7 と No.4 の測位誤差結果参照),大きな問題となる値ではなかった。 なおカットオフによる GPS 測位データの取捨選択を行った場合には,その歩留まりが 問題になるが,この点については事項で述べる。 3.4.3 CTG 首輪の通信成功度について 通信成功度は,予測よりもかなり低い結果となった。NTT ドコモにより公開されている FORMA 通信サービスエリア(http://www.nttdocomo.co.jp/support/area/kanto/)では,
今回アライグマの行動追跡を行ったかすみがうら市地域と坂東市地域は,どちらも通信可 能エリアとなっている。しかし実際の通信成功度はどちらの地域でも低く,特にかすみが うら市地域では低い傾向にあった。また昼間と夜間で比較をしてみると,どの個体につい ても,昼間の方が通信成功度が下がることが確かめられた。このことは,アライグマは基 本的に夜行性であり,昼間は樹洞,土穴,人家屋根裏などに入り休んでいるために,FORMA 通信の圏外状態になる割合が高くなっていることに関連したと想像出来た。こうした測位 データのバイアスは,CTG を利用した行動圏追跡の場合には,昼間のねぐらなどを正しく 評価できない可能性を示唆している。昼間の休息場所を特定するためには,CTG に加えて VHF 発信器を付加する必要があることを示している。また仮に夜間のみに限ってみても, 通信成功率はあまり高いものではなかった。 測位の属性情報で“50m 以内”に限ったデータの通信成功率は,当然のことながら全体 での通信成功率よりも低くなり,夜間に限定した場合でも 25%程度にとどまった。仮に夜 間の行動圏利用を再現しようと試みた場合には,平均で 1/4 程度の密度の測位データの解 析が必要なことを示している。 3.4.4 CTG 首輪の研究への実用の可能性について 今回の実用化に向けた試行の結果からは,首輪型システムの運用と,GPS 測位精度につ いては大きな問題はないことが示された。しかしバッテリー稼働時間(この部分はシステ ム全体重量とのトレードオフになる)と,通信成功率に関して課題を残した。当面の方策 は,VHF 発信器と併用による運用であろうが,消費電力を押さえるための工夫が今後求め られるが,同時に,地域による通信成功率の検討も必要である。NTT ドコモによる通信サ ービスエリアは,遮蔽物の中での通信や,地上高の低い位置での通信が想定される野生動 物への CTG 装着の場合には,参考程度に考える必要がありそうである。今後の適用対象 種としては,今回のアライグマに加え,キツネのような比較的大型で,人工的な遮蔽物の 中に入らない動物種での試験運用が想定される。
4. 捕獲個体からの生態的情報および CTG による行動圏利用追跡について
4.1 はじめに これらの項目については,平成 23 年度も調査研究を継続するために,結果については 以下に概略を記載するにとどめる。 4.2 捕獲個体からの生態学的情報 2008 年から 2011 年までに,土浦市,石岡市,つくば市,かすみがうら市,坂東市など で捕獲あるいは交通事故により回収した計 51 個体のアライグマすべての計測,採材,剖 検を行った。 犬歯(C1)セメント層年輪,犬歯歯根部形状,歯列脱換,頭骨縫合線癒着程度などによ る齢査定結果では,1 歳未満の個体と,性成熟すると考えられる 1 歳以上の個体の割合は ほぼ 1:1 であった。また,1歳未満の個体の月齢推定から出産時期を推定すると,茨城県産のアライグマの多くは,1 月∼3 月に生まれていることが伺われた。先行研究での出産 時期は,3 月∼5 月が多いとされていたことと異なる結果となった。このことは,防除計 画の推進の上では,従来言われていたよりも早い時期での防除実施が個体数抑制のために は重要であることを示している。1 歳以上の成獣の最高齢は 5 歳(n=3)と判読され,仮 にこれら個体が第二世代以降であると仮定すると,茨城県への本種の侵入は 5 年以上前に 遡ることになる。また,子宮胎盤痕と乳頭形状による判断からは,1 歳以上のメス個体の 87%(n=15)が出産経験個体であることが示された。アライグマの本県への侵入時期の推 定と,また繁殖の事実が実証的なデータで示されてきている。 オス成獣の平均体重は 7.7kg,メス成獣は 6.4kg で,オスの最大個体は 9.8kg にも達し た(図 1)。胃内容および直腸内容物の初見からは,ザリガニや果実などの自然食物に加え, 農作物や人工物も確認されており,アライグマの人間生活区間への依存の実態が見えつつ ある。 図 1 1 歳以上のアライグマ成獣の雌雄での平均体重 4.4 CTG による行動圏利用追跡について GPS-CGT の装着に関しては,これまでにかすみがうら市で計 5 個体(オス 3 個体,メ ス 2 個体),坂東市で計 2 個体(オス 2 個体)のアライグマを捕獲し,オスについては去 勢手術,メスについては妊娠抑制剤の背部皮下への埋め込みを行った後,GPS-CGT(ロケ ーション株式会社,東京)をグラスファイバーテープで固定した首輪に取り付けて再放逐 を行った。GPS-CGT 単体の場合の首輪ユニット総重量は 220g 程度,個体モニタリング用 の VHF 発信器(Biotrack 社,英国:144MHz 帯)を付加した場合のユニット総重量は 300g 程度であった。電池寿命が当初の予測(2 ヶ月以上)と異なり,各個体の追跡期間は 2 週 間から 4 週間とかなり短い期間となったが,アライグマの環境利用選択と,日周活動につ いての新たな知見を得てきている。具体的には,日没後に活動を活発化させる夜行性の行 動パターンを持ち,昼間のねぐらは 10∼20km2程度の行動圏内に複数箇所保持しており, それらを 7 日∼10 日間程度の間隔で利用することが判明してきた。またねぐら環境として は,無人の社寺,廃屋,プレハブ置き場などの人工物が多い傾向が示された。こうした環
境は茨城県において各所に数多く見られ,アライグマの生息環境として非常に適している ことが想像できた。なお,放逐したアライグマ 7 個体中の 5 個体はすでに再捕獲(1 個体 については交通事故による斃死)しており,地域生態系への影響を最小限にとどめること に成功している。 図 2 坂東市で CTG を装着したアライグマオス成獣(ID: BA07to06)の行動圏利用の一 例
図 2 かすみがうら市地域で CTG により追跡されたアライグマ 5 個体(KA08, KA05, KA01, KA02, KA03)の行動圏利用の例
5. 謝辞
調査にあたっては,株式会社野生動物保護管理事務所関西支所の岸本真弓博士,独立行 政法人農業・食品産業技術総合研究機構中央農業総合研究センター竹内正彦博士,国土交 通省国土技術政策総合研究所の園田陽一博士からご指導とご協力をいただいた.また本研 究は,(財)河川環境管理財団の河川整備基金の助成を受けた.ここに厚くお礼申し上げる.6. 引用文献
山﨑晃司・佐伯 緑・竹内正彦・及川ひろみ.2009.茨城県でのアライグマの生息動向と 今後の管理課題について.茨城県自然博物館研究報告,(12): 41-49. 山﨑晃司・佐伯緑.2010.在来種の混獲防止トリガー付きアライグマ捕獲罠の導入につい て.茨城県自然博物館研究報告 (13): 65-70. 佐伯 緑・斎藤昌幸・園田陽一.2009.個体追跡調査における携帯 GPS 端末を使った位置 情報システムの利用.哺乳類科学 49(2):193-210. 山﨑晃司・佐伯 緑・廣原正則・坂本 努.印刷中.在来種の混獲防止トリガー付きアラ イグマ捕獲罠の有効性について.茨城県自然博物館研究報告Yamazaki K, Kasai S, Koike S, Goto Y, Kozakai C, Furubayashi K. 2008. Evaluation of GPS collar performance by stationary tests and fitting on free-ranging Japanese black bears. Mammal Study 33 (4): 131-142.
助成事業者紹介
山﨑晃司
現 職:茨城県自然博物館動物研究室首席学芸員(農学博士)
主な著書:日本のクマ―ヒグマとツキノワグマの生物学―(編著)(東京大学出版会, 2011 年),The Wild Mammals of Japan(共著)(Shoukadoh Press,2009 年),森 の野生動物に学ぶ 101 のヒント(共著)(東京書籍,2003 年)など 共同研究者 佐伯 緑 現 職:独立行政法人農業・食品産業技術総合研究機構中央農業総合研究センター 研究員(学術博士) 主な著書:日本の哺乳類学第 2 巻(共著)(東京大学出版会,2008 年)など