二輪車の車線維持性能向上に関する研究
-ステアバイワイヤが車線維持性能に及ぼす影響-
日大生産工(院) ○野見山 龍介 日大生産工 丸茂 喜高 綱島 均
1. 緒 言
交通渋滞や環境負荷などの自動車が抱える問題に 対して,燃費がよく,誰でも簡単に操縦できるパーソ ナルモビリティビークルの研究・開発が行われている.
しかし,そのほとんどはコンセプトカーであるため,
すぐに普及させることは難しいと考えられる.そこで 筆者らは,既に広く普及している二輪車をベースとす るパーソナルモビリティビークルを検討している.
二輪車は,旋回する際に旋回方向とは一度逆方向に 操舵する逆操舵や低速時に直立安定を確保するため の積極的なハンドル操作など,複雑な操作が必要とさ れる.そこで,これらの操作を除去するために,二輪 車にステアバイワイヤ技術
1)
を適用することで複雑な 操縦が除去され操縦安定性が向上することが,簡易モ デルのシミュレーションにより示された2)
.さらに,二輪車の運動を詳細に再現した車両モデルを用いた 場合でもその有効性が確認されている
3)
.これらの研究では,二輪車に乗車するライダは,目 標とする車両のロール角を入力し,それを実現するよ うにステアバイワイヤにより操舵トルクを制御して いるが,目標ロール角は,ステップ入力など確定的に 与えられている.実際の運転では,目標コースに沿っ て走行するために,ライダは目標となるロール角を 時々刻々算出していることが考えられる.
本研究では,目標車線に追従して走行するためライ ダ操縦モデルを用いて,ステアバイワイヤ技術を適用 した二輪車のシミュレーションを行い,ステアバイワ イヤ技術が車線維持性能に及ぼす影響を検討する.さ らに,ステアバイワイヤを適用した二輪車に対して, 車線維持支援システム
4)
を併用した場合の車線維持性 能についても検討を行う.2. シミュレーションモデル 2.1.
車両モデル2.2.
同定モデル上記モデルに対して,制御系設計を行うために,シ ステム同定により線形モデルを導出する.システム同 定の条件としては,
16.7m/s
(60km/h)で直進走行中の 二輪車に,片振幅10Nm
,周波数1Hz
の正弦波1
周期 分の操舵トルクτ
を入力する.ステアバイワイヤの制 御目標はロール角を制御することであり,車線維持支 援システムは横変位を制御することを目的とするた め,検出する物理量はロール角φ
と横変位y 0
とした.これらの入出力のデータから,
Numerical Algorithms for Subspace State Space System Identification
法(N4SID 法)6)
を用いて,状態空間モデルを導出する.導出す るモデルの次数については,2
次から10
次までの次数 で,十分な再現性を得られ,かつ次数が低いモデルを 選んだ結果,得られたモデルの次数は8
次となった.以上より,同定されたモデル(以下,同定モデル)状 態方程式は以下のようになる.
= + u
&
x Ax B
(1)
ただし,[
1 2 3 4 5 6 7 8]
x x x x x x x x
T=
x
,u = τ
,A
は8
行8
列のシステム行列,B
は8
行1
列の 入力行列である.また,出力方程式は以下のように表される.
y = Cx
(2)
ただし,[
0]
y φ
Ty =
,C は2
行8
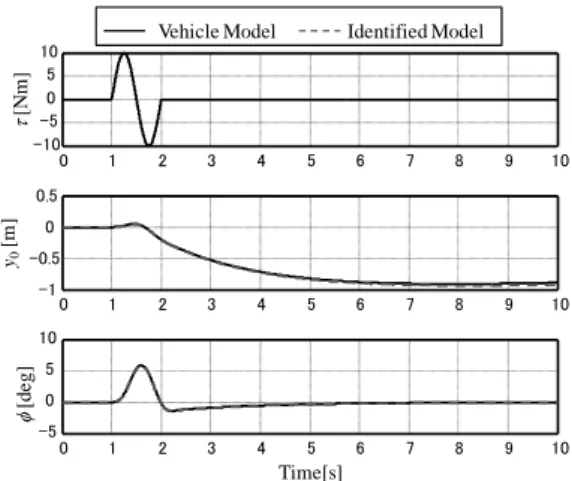
列の出力行列 である.この同定モデルに対して,システム同定時の条件で シミュレーションを行ったときの結果を図
1
に示す.実線は車両モデルの応答を示し,破線は同定モデルの 応答を示している.同定モデルの応答が,車両モデル のものとほぼ一致していることから,同定モデルが車 両モデルを再現していることが確認できる.
3. ライダ操縦モデル
制御効果を検証するために,二輪車の運動を詳細に再現した汎用シミュレーションソフトウェアである
BikeSim 5)
(Version 2.0)を用いる.このソフトウェアで用いられているモデル(以下,車両モデル)は,ラ イダを含む
9
つの剛体から構成されていて,運動自由 度は29
自由度である.本研究のシミュレーションで 用いた車両諸元は,車体総重量約180kg
の中型車のも のであり,ライダの質量は,約70kg
である.また,座標系は右手上向き直交座標系となっている.
ライダの操縦を表現するモデルとして,図
2
に示す ような前方注視モデルを用いる.二輪車の操縦は四輪車の操縦と異なり,方向制御だけ でなく,姿勢安定を保つために車両のロール運動を制 御する必要がある
7)
.二輪車を操縦するライダは,以 下に示すように,目標車線と前方注視点の横偏差に基 づく目標ロール角φ des
を算出していると考えられる.Improving Lane Keeping Performance for Motorcycles
- Effects of Steer-by-Wire System on Lane Keeping Performance -
Ryusuke Nomiyama, Yoshitaka MARUMO and Hitoshi TSUNASHIMA
−日本大学生産工学部第42回学術講演会(2009-12-5)−
― 17 ―
1-5
0 1 2 3 4 5 6 7 8 9 10 -10
-5 0 5 10
0 1 2 3 4 5 6 7 8 9 10
-1 -0.5 0 0.5
0 1 2 3 4 5 6 7 8 9 10
-5 0 5 10
y
0[m ] φ [d e g ] τ [N m ]
Vehicle Model Identified Model
Time[s]
まず,状態フィードバックを行うにあたり,目標ロ ール角に対応した状態変数を導出する.同定モデルに おいて,操舵トルクからロール角までの伝達関数が以 下のように表されるものとする.
( ) s G s
φ( ) ( ) s
φ = τ
(6)
また,同定モデルの操舵トルクから,各状態変数ま での伝達関数が以下のように表現できるものとする.
( ) ( ) ( )
i x
ix s = G s τ s
(7)
ただし,i = 1, 2, ・・・, 8である.これらの伝達関数の定常成分を用いて,ある目標ロ ール角
φ com
が与えられたときの各状態変数は,(6)式よ
り,以下のように表すことができる.Fig.1 Time history of vehicle and identified models
(0) 1 (0)
refi x
icom
x = G G φ − φ
(8)
d
y
0y
LPl
LPψ
Look-ahead Point
Desired Path y*
x
0y
0ただし,
i = 1, 2,
・・・, 8
である.これらを,目標とする状態変数として以下のようにま とめる.
1 2 3 4 5 6 7 8
T
ref ref ref ref ref ref ref ref
x x x x x x x x
⎡ ⎤
= ⎣ ⎦
x
ref
(9)
レギュレータの設計にあたっては,(1)式で示された
システムに対して,以下に示す評価関数が最小となる ようなフィードバックゲインK
を求める.Fig. 2 Rider control model by look-ahead point
(
2 2)
0
( ) ( )
SBW SBW SBW
J = ∫
∞q φ φ t + r τ t d t
(10)
des K RM d
φ = −
(3)
ただし,
τ SBW
は操舵トルク入力,q φ
,r SBW
はそれぞれ ロール角,操舵トルク入力に対する重みである.ただし, , であり,
K RM
は 前方注視点の横偏差に対するゲインである.* y y
d =
LP− y
LP= y
0+ l
LPψ
求まったフィードバックゲインを用いて,以下のよ うなフィードバックを行うことにより,制御入力が決 定される.
従来の二輪車では,ライダが操舵トルクを発生させ る.算出された目標ロール角
φ des
をもとに,ライダの 入力する操舵トルクτ RM
は以下のように表現できる.( )
{ }
TsD RM
des _ RM _ RM
e
Ls K T
K
−+ +
−
−
= 1
φ 1 φ
φ
τ
φ φ&& (4)
(
ref)
SBW
= − K x − x
τ
(11)
ただし,
1 2 3 4 5 6 7 8
x x x x x x x x
K K K K K K K K
⎡ ⎤
= ⎣ ⎦
K
ただし, と はそれぞれロール角とロール である.レイトに対するゲイン,
T L
とT D
はそれぞれライダの 入力のむだ時間と一次遅れ系の時定数である.RM
K
φ_K
φ&_RM次に,状態推定を行う上で,検出する物理量として は,システム同定時に用いたロール角および横変位を 採用し,カルマンフィルタを設計する.プロセスノイ ズを
w
として,制御対象の入力端に操舵トルク外乱τ dist
が加わるものとすると,カルマンフィルタを用いたシステムの状態方程式は以下のようになる.
ステアバイワイヤを適用した二輪車の場合,ライダ は目標ロール角をステアバイワイヤに入力する.この とき,ライダが目標ロール角
φ des
に対応する注視点横 変位を認知してから目標ロール角を入力するまでに は遅れがあるため,むだ時間と一次遅れを考慮して,ライダが実際に入力する目標ロール角
φ com
を以下の 式で表す.u w
= + +
&
x Ax B G
(12)
ただし,w = τ dist
,G = B
である.また,出力方程式は,センサノイズ
v
を用いて以下 のように記述できる.1 1
T sL com des
D
T s e
φ = φ
−+
(5)
= +
y Cx v
(13)
ただし,
v = ⎣ ⎡ v
yv φ ⎤ ⎦
Tである.4. ステアバイワイヤシステムの制御系設計
ステアバイワイヤの制御系設計においては,状態フ ィードバックをベースとする最適制御理論を適用し,
センサで観測された物理量から状態変数を推定する ために,カルマンフィルタを併用した
LQG
制御を用 いる3)
.以上より,カルマンフィルタゲインを算出し,観測 出力と制御入力から状態変数を推定する.また,ブロ ック線図を図
3
に示す.― 18 ―
Rider LQ controller Vehicle
characteristics
φ
comτ SBW
− + x ˆ x
refy d
y
LPKalman
Filter
Vehicle (Plant)
y
∗+
−
SBW -0.6 0 2 4 6 8
-0.4 -0.2 0 0.2
0 2 4 6 8
-20 -10 0 10
0 2 4 6 8
-4 -2 0 2
0 2 4 6 8
-10 -5 0 5 10
0 2 4 6 8
-10 -5 0 5 10
0 2 4 6 8
-1 -0.5 0 0.5
τ [N m ] δ [de g]
y
0[m ] ψ [ de g ] ψ [N m ]
φ [d e g ]
Time[s] Time[s]
・
:with SBW :without SBW
τ
RMτ
SBWFig. 3 Block diagram of closed-loop system
5. シミュレーションによる検討
3
章で仮定したライダ操縦モデルと4
章で設計した 制御系を用い,図3
に示すように二輪車‐ライダ系の クローズドループを作成し,シミュレーションを行う.シミュレーション条件は,二輪車が
60km/h
で走行 中に,シミュレーション開始1s
後に両振幅10Nm
,周 波数1Hz
の余弦波1
周期分の操舵トルク外乱が入力 されるものとし,目標車線y*
は0m
とする.なお,制 御系の設計にあたっては,評価関数の重みをq φ = 300 2
,r = 1
とした.ライダ操縦モデルに関するパラメータは,それぞれ
l LP = 25m
(注視時間1.5s
),K φ_RM = 70Nm/rad
,K
φ&_RM = 10Nms/rad
,K RM = -0.12rad/m
,T D = 0.1s
,T L = 0.1s
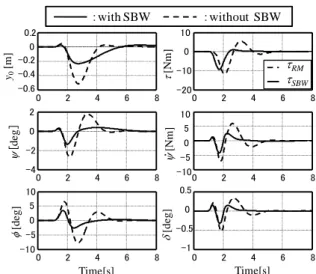
とした. シミュレーション結果を図4
に示す.実線はステアバイワイヤを適用した二輪車,すな わちライダが指令した目標ロール角を実現させるた めにステアバイワイヤにより操舵トルク
τ SBW
が入力 される場合の応答を示している.破線は従来の二輪車 の応答,すなわちライダが操舵トルクτ RM
を入力する 場合の応答を示している.ステアバイワイヤを用いる ことで,操舵トルクτ
(図右上)の応答が速くなるた め,ロール角φ
(図左下)が抑えられている.その結 果,従来の二輪車と比較して,横変位y 0
(図左上)が 小さくなるため,車線維持性能が向上することが確認 できる.Fig.4 Time history of rider-motorcycle system with and without SBW system
さらに
q φ
を300 2
,400 2
,500 2
と変化させた場合のシ ミュレーション結果を図5
に示す.重みを増加させる と横変位y 0
(図左上)が小さくなるため,車線維持性 能が向上することが確認できる.6. 車線維持支援システムを用いた場合の検討
0 2 4 6 8
-0.3 -0.2 -0.1 0 0.1
0 2 4 6 8
-15 -10 -5 0 5
0 2 4 6 8
-1.5 -1 -0.5 0 0.5
0 2 4 6 8
-5 0 5
0 2 4 6 8
-4 -2 0 2 4
0 2 4 6 8
-0.4 -0.2 0 0.2 0.4
τ [N m ] δ [de g ]
y
0[m ] ψ [ de g ] ψ [N m ]
φ [de g ]
Time[s] Time[s]
・
q
φlarger
Fig. 5 Time history with steering torque disturbance (increasing q φ )
車線維持支援システムの制御系の仕様を決める評 価関数を以下のように定める.
( ) ( )
( 0 2 2 )
LK 0 y LK LK
J = ∫ ∞ q y t + r τ t dt
(14)
前章の結果より,二輪車にステアバイワイヤを適用することで車線維持性能が向上することが確認でき た.しかし,ステアバイワイヤのように,ライダが意 図した通りに車両運動を実現させるシステムでは,ラ イダのエラーにより生じる事故を防ぐことはできな いため,ライダのエラーを車両側でカバーするような 運転支援システムが重要であると考えられる.
ここで,
q y
,r LK
は,それぞれ横変位,操舵トルクに 対する重みである.式(14)が最小となるようにフィー ドバックゲインK LK
を求め,状態変数をかけることで,操舵トルク
τ LK
が決まる.ステアバイワイヤを適用した二輪車に車線維持支 援システムを併用した場合の車線維持性能を検討す るため,前章に示した操舵トルク外乱を付加した場合 と同様のシミュレーションを行なった結果を図
6
に 示す.ここでは,ステアバイワイヤの評価関数の重み をq φ = 300 2
,r SBW = 1
とし,車線維持支援システムの 評価関数の重みをq y = 10 2
,rLK = 1
とした.実線は二 輪車にステアバイワイヤと車線維持支援システムを 適用した場合の応答,すなわち二輪車にはステアバイ ワイヤによる操舵トルクτ SBW
と車線維持支援システ ムによる操舵トルクτ LK
が入力される.破線はステア バイワイヤのみ適用した場合の応答を示している.こ 既存研究では二輪車の車線維持支援システムについて,ライダ操縦モデルを用いて評価を行い,車線維 持性能が向上することを確認している
8)
.そこで,本 章ではステアバイワイヤを適用した二輪車に車線維 持支援システムを併用した場合の車線維持性能につ いて検討する.車線維持支援システムの制御系設計に ついては,参考文献4)
に示されており,ここでは概要 のみを記述する.― 19 ―
0 2 4 6 8 -0.3
-0.2 -0.1 0 0.1
0 2 4 6 8
-1.5 -1 -0.5 0 0.5
0 2 4 6 8
-4 -2 0 2 4
0 2 4 6 8
-0.4 -0.2 0 0.2
0 2 4 6 8
-4 -2 0 2
0 2 4 6 8
-10 -5 0 5
τ
LK[N m ] δ [d e g ]
y
0[m ] ψ [ de g ]
φ [d e g ]
Time[s] Time[s]
τ
SBW[N m ]
:with LKA and SBW : with SBW
Fig. 6 Time history of SBW system with and without LKA system
0 2 4 6 8
-0.2 -0.15 -0.1 -0.05 0
0 2 4 6 8
-1.5 -1 -0.5 0 0.5
0 2 4 6 8
-4 -2 0 2 4
0 2 4 6 8
-0.4 -0.2 0 0.2 0.4
0 2 4 6 8
-15 -10 -5 0 5
0 2 4 6 8
-10 -5 0 5 0.05
τ
LK[N m ] δ [de g ]
y
0[m ] ψ [ de g ]
φ [d eg ]
Time[s] Time[s]
τ
SBW[N m ]
q
ylarger
Fig. 7 Time history of SBW and LKA systems (increasing q y )
SBW+LKA 0
0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
R M S v alu e of la te ra l d is p la ce m e n t y
0[m ]
RM SBW
q
φ=300
2,400
2,500
2q
y=10
2,20
2,30
2Fig.8 Comparison of lane keeping performance
の結果より,ステアバイワイヤを適用した二輪車に車 線維持支援システムを適用することで,横変位はさら に抑制され,車線維持性能が向上することが確認でき る.次に
q y
を10 2
,103
,104
と変化させた場合のシミ ュレーション結果を図7
に示す.重みを増加させると横変位が抑制され,車線維持性能が向上することが確 認できる.
ここで,これまで検討した結果について,車線維持 性能の比較を行う.評価指標としては,車両重心点横
変位
y 0
のRMS(Root-Mean-Square)値を用いて,そ
れぞれのシステムを適用した場合の車線維持性能を 比較する.比較結果を図
8
に示す.これより,ライダ のみの操縦(RM)に比べて,ステアバイワイヤを適 用した場合(SBW
)には横変位のRMS
値が小さくな るため車線維持性能が向上し,ステアバイワイヤの制 御系設計における評価関数の重みを増加させること で,さらに向上することが確認できる.また,ステア バ イ ワ イ ヤ に 車 線 維 持 支 援 シ ス テ ム を 併 用(SBW+LKA)することで,支援システムがない場合 と比較して車線維持性能が向上し,支援システムの制 御系設計における評価関数の重みを増加させると,車 線維持性能がさらに向上することがわかる.
7. 結 言
本研究では,ステアバイワイヤが車線維持性能に及 ぼす影響を検討するため,目標ロール角を算出するラ イダ操縦モデルを用いてシミュレーションを行った.
また,車線維持支援システムを併用した場合の効果を 検証した.その結果,以下の結論を得た.
(1)
ライダが算出する目標ロール角をもとに,ステ アバイワイヤが操舵トルクを制御することで,良好な車線維持性能が得られることを確認した.
(2)
ステアバイワイヤを適用した二輪車に,車線維 持支援システムを併用することで,車線維持性 能が向上することを確認した.「参考文献」
1)
本山康夫,ステアバイワイヤと車両運動制御,自動車技 術,Vol.57,No.2, (2003)
,pp.39-43
2) Marumo, Y. and Nagai, M., Steering Control of Motorcycles Using Steer-By-Wire system, Vehicle System Dynamics,,
Vol.45
,No.5, (2007), pp.445-458
3)
丸茂喜高,桑原健吾,片桐希,綱島均,二輪車の ステアバイワイヤによる二輪車の操舵制御の検 討-
マルチボディシミュレーションによる制御効 果の検証-,自動車技術会論文集,Vol.39,No2,(2008)
,pp.27-32
4)
丸茂喜高,片桐希,綱島均,二輪車の動特性を考 慮した車線追従制御に関する研究,日本機械学会 論文集,C編,Vol. 74, No. 737, (2008), pp.37-43 5) Virtual Mechanics Corporationホームページ
http://www.virtualmechanics.co.jp/html/bs.html 6)
足立修一,MATLAB
による制御のためのシステム同定,東京,東京電機大学出版,
(1996)
,pp.138-139 7)
片山硬,西見智雄,岡山功,青木章,二輪車ライダの操縦動作シミュレーションモデル,自動車技 術会論文集,Vol.28,No.3,(1997),pp.137-142
8)
片桐希,丸茂喜高,綱島均,ライダ操縦モデルを用いた二輪車の車線維持支援システムの検討,
自 動 車 技 術 会 論 文 集 ,Vol.40,No.3,(2009),
![Fig. 6 Time history of SBW system with and without LKA system 0 2 4 6 8-0.2-0.15-0.1-0.050 0 2 4 6 8-1.5-1-0.500.5 0 2 4 6 8-4-2024 0 2 4 6 8-0.4-0.200.20.4 0 2 4 6 8-15-10-505 0 2 4 6 8-10-5050.05τLK[Nm]δ[deg]y0[m]ψ[deg]φ[deg] Time[s] Time[s]τSBW[Nm] q](https://thumb-ap.123doks.com/thumbv2/123deta/7284985.2413248/4.892.116.428.106.380/fig-time-history-sbw-lka-time-time-τsbw.webp)
