修 士 学 位 論 文
題 名
プラズマアクチュエータによる流れ制御に向けた基礎研究
指 導 教 授 小 方 聡 准 教 授
平 成 3 1年 1月 1 0日 提 出
首都大学東京大学院
理 工 学 研 究 科 機 械 工 学 専 攻 学修番号 17883327
氏 名 玉 城 桂 舟
2
目次
1. 序論
1. 1研究背景
1. 2流体制御デバイスの変遷
1. 3 DBD-PAの誘起流生成の原理
1. 4 DBD-PAの従来研究
1. 5 DBD-PAの実用機械適用に向けた研究
1. 6噴流制御の従来研究 1. 7研究目的
1. 8本論文の概要 1. 9本論文の使用記号 2. 実験装置および実験方法 2. 1本実験のDBD-PA
2. 2円柱後流のDBD-PAによる制御
2. 3 DBD-PAとコアンダ効果による噴流制御
2. 4自作の噴流生成装置を用いた実証実験 3. 実験結果および考察
3. 1誘起流速度分布測定
3. 2円柱後流のDBD-PAによる制御
3. 3 DBD-PAとコアンダ効果による噴流制御
3. 4自作の噴流生成装置を用いた実証実験
4. 結論
3
1 章
序論
4
1. 序論 1.1研究背景
近年,温室効果ガス排出やエネルギー資源枯渇問題を背景に,環境負荷の低 減や経済性の改善のために剥離制御や乱流摩擦抵抗軽減が可能な流体制御技術
(1)が注目されている.一般的な流体制御として, ボルテックスジェネレータなど の受動的手法が航空機などで取り入れられている.しかし,ボルテックスジェ ネレータは巡航時の抵抗になるなどの欠点を持つ(2).一方,非定常な流れ場に対 して柔軟に適用できる駆動追従性を持つ能動流体制御技術(3)は,工場や輸送機器 で稼働する流体機械のエネルギー効率を飛躍的に向上できる可能性があり,
様々な工業分野への波及効果が期待されている.従来の能動的手法として,シ ンセティックジェットなどがある.これはケース内に収められた振動版が振動 することにより開口部から流体を噴射するアクチュエータであり,高い応答性 を持つが,機械的不良を起こしやすい.このような従来の能動制御手法の持つ 機械的特性や適用範囲などの諸問題を解決する革新的な能動流体制御技術とし て,1990年後半にRothら(4)によって開発された誘電体バリア放電プラズマアク チュエータ (Dielectric Barrier Discharge Plasma Actuator 以下 DBD-PA)が挙げら れる.
誘電体バリア放電(Dielectric Barrier Discharge, DBD)はオゾナイザー放電と呼
ばれ,1857年,Siemensがオゾンを合成する方法として考案したことに端を発し,
オゾン生成,エキシマランプ,排ガス処理,有害物質の分解,除菌・殺菌,燃 料改質など,気相反応を中心に幅広く利用されている(5).DBD-PAは図1に示す ように非対称に配置した 2 枚の電極とそれらに挟まれた誘電体から構成される 非常に簡素な構造である.電極に高周波数高電圧(通常 周波数1 – 10 kHz,印加
電圧1 – 10 kV 程度の交流)を印加すると露出電極の片側エッジ近傍で誘電体バ
リア放電が発生し,壁面局近傍で露出電極から被覆電極へ向かう方向に誘起流 が生じる.生じた誘電体バリア放電は青紫色の微弱光として観察される.
DBA-PA による流体制御は,(1) 壁面近傍に局所的な体積力を誘起できること,
(2) 時定数の短い電気的制御が可能であること,(3) 二次流れの要因となる機械 的駆動部がないこと,(4)電極と誘電体の積層から構成される単純かつ柔軟な構 造であること,などのなどの長所を有しており,剥離制御や騒音低減制御の分 野で研究が盛んに行われ,大きな成果を収めている(6)-(10).一方で,実用化に向 けた課題として,(1) 高電圧を出力する電源装置が必要であること,(2) 放電に よる誘電体の絶縁破壊などの耐久性が低いこと,(3) 電気エネルギーから流体が 得る運動エネルギーへの変換効率は 0.1%程度(11)(12)と低いこと,(4) 誘電体バリ
5
ア放電の発生に伴い,人体に有害なオゾンを生成すること,などが挙げられる.
前述したように,研究室レベルにおける DBD-PA に関する研究成果は出始め ているが,実用化には至っていない.このことは,投入エネルギーに対して誘 起流速度が遅いなどと言ったエネルギー変換効率の低さや,オゾンも同時に生 成することで使用場所が限定される点などに代表される解決すべき問題が多数 あることに起因すると考えられる.
一方,エアコンや空気清浄機など代表される送風機の風向きを変えるために は,図2(13)に示すような風向板を用いることが一般的である.風向板の存在は機 器の省スペース化,デザインの自由度を妨げる要因の一つになっており,風向 制御能力を向上させようとした場合は図 3(14)に示すように風向板を増やすとい った方法がとられているのが現状である.風向制御に関連して,Dyson社が「羽 のない扇風機」として発売し話題となった,図4に示すAir multiplier(15)のように 噴流は周囲の空気を巻き込む,そしてコアンダ効果も利用し流れの方向を変え ることができる.DBD-PA の噴流も同じように流れを誘引でき,電気的な
DBD-PAの制御のみで流れの方向を変えることが可能であると考えられる.もし,
DBD-PAのみで風向制御が可能となれば,物理的な壁面を用いずに風向を変える
ことができ,工業的には省スペース化やデザインの自由度を格段に上げること が可能となる.さらに,前述したオゾンの生成装置としての機能を考えれば,
ウイルスなどの有害物質の殺菌なども噴流制御と同時に行うことができ,ネガ ティブな特徴を利点に変えることが可能となり,新たな付加価値を生み出す可 能性もある.これらの研究背景や従来の研究を考慮し,本研究では DBD-PA を 用いた噴流方向制御技術の開発に向けた基礎実験を行うことを目的とする.こ の目的を達成するために,特に自作の噴流生成装置を用いた方向制御に関する 実証実験に主眼を置く.
6
Fig.1 Structure of DBD-PA
Fig.2 Wind direction board attached to air conditioner (Panasonic, Inc., 2011)
Wind direction board
7
Fig.3 Wind direction boards attached to air conditioner (Hitachi Appliances, Inc., 2011)
Fig.4 Flow of Air multiplier (Yamashita, 2012)
The first wind direction board The second wind direction board
8
1.2 流体制御デバイスの変遷
1. 2.1 流体制御デバイスの歴史と発展
本阿弥(16)は,過去30年間の流体工学の発展と流れの制御デバイスの発展につ いてまとめた.表1(16)に実験流体力学並びに数値流体力学分野における革新的技 術の変遷を示す.1980年代,乱流モデルの構築(17)を含む数値計算が隆盛となり,
乱流現象の解明と制御技術に関する研究が行われ,気泡による大型船の船底の 摩擦抵抗軽減技術などが実用化に至っている.1990 年代には,ダブルパルスレ ザー高原と画像処理を利用したPIV(Particle Image Velocimetry)計測技術並びに半 導体製造技術に基づくMEMS(Micro Electro-Mechanical System)技術が一般化し,
計算機能力が向上し,DNS(Direct Numerical Simulation)により,低レイノルズ数 でもチャンネル流れの乱流構造の解明が試みられるようになった.2000 年代に 入り,手のひらサイズの小型無人機や低速高高度航空機では,レイノルズ数が 非常に小さくなり,流れの剥離と失速により空力性能が著しく低下するため,
低レイノルズ数域における流れの桂魚に関心が集まった.この他,航空用エン ジンの軽量化を推進するためには,エンジン重量の 35%を占める低圧タービン の軽量化が必須となった.羽根枚数を減少さえると,タービン翼の高負荷化に 伴う低レイノルズ数域での層流剥離と再付着過程の現象解明と制御が課題とな った.数値流体力学の分野では,スーパーコンピュータによる計算の大規模化,
複数の物理現象をモデル化してマルチフィジックスを考慮した複合化,そして,
設計へ導入することによる汎用化が進んだ.2010 年代では,実験流体力学と数 値流体力学の併用が問題解決に不可欠となっている.
本阿弥が過去50年の間に流れの制御に用いられたアクチュエータを年代順に まとめたものを表 2(16)に示す.1950 年代以降,渦発生器などの流れの剥離に対 する受動制御デバイスが採用され,航空機の翼面に利用されている.1980 年代 に入り,乱流研究の隆盛を皮切りに,乱流制御を制御することが大きな注目を 集め,音響スピーカー,振動フラップ,渦発生ジェットなど多くのアクチュエ ータを利用した研究が開始された.1990 年代に入ると,ピエゾ効果を利用した アクチュエータやステッッピングモータの小型化が進み,Labviewなどのソフト ウェアの汎用化によりアクチュエータの利用が急芸気に拡大した.シンセティ ックジェットや可動式渦発生器に見られる先進アクチュエータが1990年代に提 案されている.2000年代に入ると,DBD-PAの開発が進んだ.
このようにして,レーザー光学機器の流れ計測への汎用化と MEMS の発展が 大きく貢献して,アクチュエータの小型化や低消費電力駆動により,流れの制 御系への適用範囲が拡大し,現在に至る.
9
Table.1 Innovative Technology in EFD and CFD (Honami, 2003) Experimental Fluid Dynamics Computational Fluid Dynamics 1980 Passive / Active Control of Turbulent
Shear Layer Turbulence Model
Drag Reduction Large Eddy Simulation
Flow Separation
1990 Instrumentation by Laser Opt: PTV / PIV Direct Numerical Simulation Micro Fluidics : Micro Channel
MEMS based Actuators & Sensors Noise
Pressure Sensitive paint Flow & Sound Pressure 2000 Low Reynolds Number Flows CFD based Design
Airfoils Flow Control Optimization
Micro Air Vehicles Large Scale Computation 2010 Integration Technology Multi-Physics
Table.2 progress in Passive and Ative Control Devices (Honami, 2003)
1960 1970 1980 1990 2000 2010
Passive Control
・Separation Limit - Streamline body ・Vortex Generator
・Grid, Segmented step
Active Control
・Speaker ・Fluid Jet
・Flap ・Slit ・Synthetic Jet
・Vortex Generator Jet ・Plasma Jet
10
1. 2.2 アクチュエータの分類
Cattafestaら(18)は,シンセティックジェットに代表されるフルイディック,振
動フラップのような可動物体,近年進展著しいDBD-PA,その他の電磁力などに よって流れ場を活性化する機能の視点からアクチュエータを分類している.本 阿弥(16)は,図 5 に示すように,流れの制御において,活性化する制御対象の視 点からアクチュエータを分類した.すなわち,運動量活性型,並びに周期的攪 乱により流れを活性化する型,それらの混合型に流れの制御用アクチュエータ を大別した.以下に各種アクチュエータの構造や特徴を述べる.
運動量活性型アクチュエータは,せん断応力や圧力勾配により運動量が低下 した壁近傍の流れを高い運動量の流れに変える方式である.壁近傍の流体に高 い運動量を付加する壁面噴流方式,渦発生器や渦発生ジェットなどのように境 界層外層の高い運動量を有する流体を壁近傍に輸送する方式がある.前者は動 力を必要とする能動方式,個社は受動方式である.
DBD-PAは,電極に高周波数で高電圧を印加すると露出電極の片側エッジ近傍
で誘電体バリア放電が発生し,壁面極近傍で露出電極から埋め込み電極へ向か う方向に誘起流が生じる.近年,基本特性の解明が進み,電極の様々な配置が 検討され,運動量付加ばかりでなく,複数電極を配置することにより縦渦を誘 起する方式も提案され,運動量付加ならびに運動量輸送を可能とする.
運動量活性型の範疇で実用化している代表的なアクチュエータは,固定式渦 発生器であり,翼後端から縦渦を発生させ,主流の高い運動量を壁面近傍輸送 する.この他,ゴルフボールの表面に用いられている凹部を有するティンプル は,凹部に発生する2次流れにより,運動量を輸送するため,この範疇に含め る.
渦発生ジェット(19)(20)とDBD-PAは運動量を付加し,かつ輸送するため混合型 とする.
周期的攪乱型アクチュエータは,流れが有する周期的攪拌の受容性を利用し て,流れが持つ固有の周波数と同程度の周波数の攪乱を与えることにより,剥 離せん断層の成長を促進させ,剥離せん断層により構成される剥離泡のサイズ を小さくする方式である.代表的なものとして,シンセティックジェットが挙 げられる(21).シンセティックジェットはキャビティを有し,底面に振動版を配 置し,加振することにより,開口部(オリフィス)より流れが吸い込みと吹き 出しを繰り返す.ある周波数以上にすると,吹き出されたジェットのすべてが 吸い込まれることなく残存する.この過程を繰り返すことにより,ジェットが 人工的に生成するため,プラズマシンセティックジェットアクチュエータと呼 ばれることがある.
11
Fig.5 Classification of actuators based on activated property (Honami, 2003)
12
さらに,近年,可動式ティンプルや騒音抑制に利用されるフルイディックジ ェット(22)のほか,各種流体現象を利用したマイクロアクチュエータも注目を集 めている.
最後に,混合型アクチュエータとしては,運動量を付加,あるいは輸送する 方式に周期的攪乱を加えて,アクチュエータの機能をさらに高めようとする方 式がある.例えば,シンセティック渦発生ジェット,パルス渦発生ジェット,
アクテブティンプルがこの方式に相当する.
1.2.3 アクチュエータの評価
各種制御デバイスが提案されているが,選択は個々の研究者に委ねられてい る.アクチュエータデバイスの選択を容易にするためには,デバイス相互の比 較や選択に必要な情報を提供することが重要である.必ずしも同じ条件で比較 できない場合でも,試験項目や評価スペックを検討し,総合的に評価できるよ うにすることが今後の課題である.すなわち,以下に示す評価項目(16)に対し,
試験や評価の仕様を作成し,相対評価の可能性を検討することが必要である.
このため,日本においては近年,規格統一をした標準アクチュエータを用いて 研究成果の比較を容易にする試みが始まっている.
1. 空力特性有効性 剥離制御などの空力特性の向上の定量化
2. エネルギー有効率 Duty 比を考慮した入力エネルギーに対する出力をエネル ギーに換算する相対評価
3. 経済性 製作費と運転費を含めたコスト
4. 構造有効性 アクチュエータ質量増加に対する機器質量比 5. 耐久性 静的 性能を保証した運転時間
動的 疲労破壊
6. 流れ場適合性 外部環境に対する強靭性
各種アクチュエータデバイスの定性的な評価結果を表3(16)に示す.
13
Table.3 Performance evaluation of kinds of actuator (Honami, 2003)
Passive Device
Vortex Generator Synthetic Jet Plasma Actuator Active Dimple Transport Addition Addition / Transport Transport
Without With With With
- High High Medium
Low Good Good Good Good
Medium Good Good Good Good
High Very Good Possible Difficult Difficult
Whole Region in Boundary Layer
Boundary Layer
Edge Near-wall Near-wall
Simple Complex Simple Complex
Low Medium High Medium
Excellent Medium Bad Medium
Momentum
Control Region
Active Device
Structure Copst Endurance Applied Reynolds
Number Frequency Periodic Disturbance
14
1.3 DBD-PAの誘起流生成の原理
DBD-PAによる誘起流の発生メカニズムについては,現在多くの学者・研究者ら
が実験・数値シミュレーション双方から解析を行い数々の説が提唱されている が,未だに意見の一致をみていない(23).ここでは比較的広く知られている理論 として,Font(24)の行った数値解析による力の発生原理について記す.
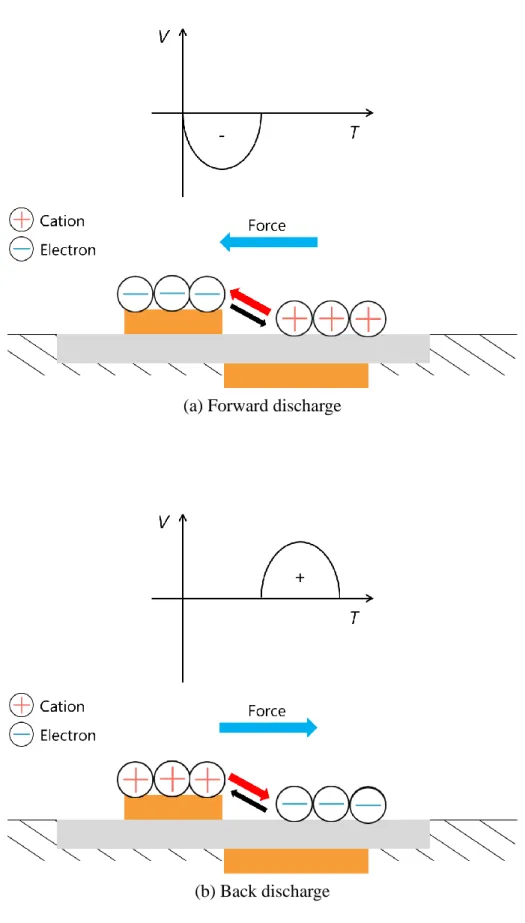
単体の誘電体バリア放電(DBD)は,主に空間内で放電させることによってイオ ン化が起こり,それによる電子,イオンなどの移動による分子間の衝突が力の 発生原理とされている.DBD放電において,一周期中の初めの半周期では,数 kV程度の負の電圧が露出電極に印加される.この半周期をforward dischargeと
呼ぶ(図6(a)).このとき,露出電極近くの空間で放射された電子が誘電体に向か
って加速していき,イオン化が生じる.大部分の電子は中性子域を流れ,誘電 体に付着し,誘電体上の境界で動きを止める.放電により最大密度まで到達す るまでの時間は約30nsとされている.その後,空間中あるいは露出電極上でイ オンが再結合するにつれて,徐々に放電は衰退していく.最終的に forward
discharge では,放電終了後に電子によって覆われた誘電体を形成する.次の半
周期では,正の電圧が露出電極に印加される.この半周期をback dischargeと呼
ぶ(図6(b)).正の電圧では,イオンが最初に露出電極上で再結合または中性子化
する間に,始めの半周期で誘電体表面に電子が溜まった状態となる.この状態
がback dischargeでの初期条件となり,溜まっていた電子が露出電極に向かって
加速していき,エネルギーを得て,イオン化,励磁,分離が生じ始める.実際 には,これらの電子は誘電体の表面から放たれるために小さな結合エネルギー に打ち勝たなければならない.その結果,back dischargeにおける放電密度は一
桁違い,forward dischargeにおける放電密度よりも大きくなる.中世流れでプラ
ズマを発生させると,供給された粒子と中性子とが衝突することで得られるエ ネルギーによって,その空間に力が生成される.しかしながら,電子とイオン は力の生成が均等に生じる訳ではない.中性流子中のイオン同士が衝突する断 面積は,電子と中性子間で衝突する断面積よりも 1 オーダーもしくはそれ以上 に大きい.その結果,イオンはより多く衝突を受けることによって,力の大部 分が加わる.Forward dischargeでは,イオンは被覆電極から露出電極の方へ引っ 張られ,露出電極方向へ力が作用する.一方,back discharge中のイオン密度の
方がforward dischargeよりも大きいため,発生する力は等しくはならない.Enloe
ら(24)はforward dischargeにおける力の大きさは,back dischargeに発生する力の
大きさの5%に満たないことを明らかにしている.その結果,DBD-PAから生成
する力は全周期を平均化すると,露出電極から被覆電極へ出ていく力,流れに ついては下降流が発生することになる.
15
(a) Forward discharge
(b) Back discharge
Fig. 6 Principle of induced flow from DBD-PA
16
1. 4 DBD-PAの駆動効率
Enloeら(25)はSDBDプラズマアクチュエータのプラズマ形態についていくつか
の知見を示し,それに加えてプラズマアクチュエータの電力散逸について以下 の式を示した.
𝑃= 𝑓𝑝∫ 𝑉𝑎𝑐(𝑞)𝑑𝑞
𝑇
0
Pは消費電力,fpは印加周波数,Vacは印加電圧,qはコンデンサに溜まる電荷量 である.
アクチュエータが誘起する壁面ジェットの速度分布 U において,プラズマアク チュエ−タスパン幅の単位長さあたりの運動量は
𝑃𝑚𝑒𝑐ℎ 𝑊𝑡 = 1
2𝑊𝑡∫ 𝜌𝑈3𝑑𝑦
∞
0
として示される.ρは大気の密度である.投入した電力から運動エネルギーへの エネルギー変換効率𝜂=𝑃𝑚𝑒𝑐ℎ/𝑃と示される.エネルギー変換効率は誘電体厚さ に依存するといわれているが,現状では DBD-PA の最大効率はわずか 0.1 から 0.01%程度である.
DBD の電力消費には主に(1) 電源と DBD-PAのインピーダンスのミスマッチに
よる損失 (2) 誘電体加熱などの熱として散逸 (3)イオン生成・維持に必要なエネ
ルギー (4) 運動エネルギーとして消費される(26).効率的な駆動を目指し消費電
力を抑える駆動方法としてはナノ秒高電圧パルスが注目されている(27).プラズ マの形成は10nsで形成されるため,長時間の直流,交流駆動よりもパルス駆動 は省電力化に貢献できるとされる.
17
1. 4 DBD-PAの従来研究
電極間距離
Forte(28)らはDBD-PAの大規模なパラメトリックスタディを行い,DBD-PAの誘
起流特性を明らかにした.DBD-PAの露出側と被覆側の電極間距離dは0 – 5 mm の間で最大誘起流速度が速くなる.それは電極間ギャップが増大することによ り電界分布を修正し,イオンをより長い距離で加速することができるためであ る.しかし大きすぎる隙間は効果誘電厚さ(厚みと誘電率の比)を増すため電界が 弱められ,出力が低下する.露出電極と被覆電極をオーバーラップさせた場合 では電界の対称的な分布が加速化には貢献しない.この場合において,両方向 に誘起流が生成する.つまり下流側に生成すると同時に上流側へも誘起流が生 じる.このことから電極位置は誘起流の風向に影響を及ぼすと明らかになった.
電極幅
被覆電極幅の増加に伴い,プラズマはより遠くに拡張する.そして照射された イオンはより移動距離が長くなり,誘起流速度は速められる.しかし放電に十 分な長さを超えるとプラズマを持続させる現象は散逸し,噴流速度は一定の値 となる.
誘電体
複数の誘電体素材を用いた大規模な実験的研究をStephenら (29)は行っている.
この報告では検証を行ったVp-p < 20 kVの入力印加電圧間では,材料の化学組成 および構造がアクチュエータ性能には依存せず,効果誘電厚み (誘電体厚みと誘
電率ε (F/m)の比)に依存するという研究結果を示した.しかし,誘電体は湿度の
影響を受けやすく,PTFEとナイロンでは水吸着度の違いから性能に差異が出る 可能性を示唆した.一般的に薄い誘電体を使うことで絶縁破壊を引き起こしや すくなる.
印加電圧
印加電圧を増加させることにより,電場が強められイオンはより大きなクーロ ン力を得られ,噴流速度は漸近的に増加する.また,Corkeら(30)のレビューによ ると,印加電圧の正の半周期と負の半周期では生じる放電のプロセスが異なり,
正の半周期ではプラズマの発光強度が強まることを実験的に示した.
18
周波数
周波数を増加すると誘起噴流速度は漸近的に増加する.瀬川ら(31)は印加電圧の 立ち上がりdV / dtと消費電力依存性を調査した.𝑑𝑉/𝑑𝑡 ≤ 300𝑉/𝜇𝑠𝑒𝑐ではほと んど変化が見られず,これを超えると急激に消費電力が急増する.これは誘電 体バリア放電以外の系の静電容量へ給電されるためである.
電圧波形
DBD-PAに用いられる交流電圧は正弦波や矩形波,バースト波,三角波などが
あり,低消費電力や高速化に向けて多岐に渡る研究が行われている.アクチュ エ−タ誘起噴流の効率低下には誘電体表面上に電荷が堆積することが主因とさ れる.この電荷は電場を遮断する要因となるため,誘起噴流速度を低下させる.
この電荷の体積を除去するためアクチュエータの極性の切り替えを効率良く行 うサイン波に高周波パルス波を重ね合わせた研究も行われている(32).また,柳 田ら(33)はバースト周波数fbが低いほど流れが拡がり,流量が増え,Duty比に比 例して流速,流量,運動量が増えることを示した.そして,小方ら(34)は印加電 圧のDuty比を変化させ,特定の周波数のみにおいてではあるが通常露出電極側 から被覆電極側に生成する噴流を逆流化することが可能であると示した.
電極配置および構造
DBD-PAの性能向上に関する研究も近年数多く研究されている.例として,複
数箇所放電,スライディング放電アクチュエータ,ナノセコンドパルスDBD-PA, 局所アークフィラメントアクチュエータなどのプラズマ放電に関するオプショ ンを含む性能向上に関する研究が現在では多く行われている.Benard ら(35)は 3 本目の電極がシールドとして,2本の電極の間を連続させた複数電極を持つ誘電 体バリア装置を開発した.スライディング放電プラズマアクチュエータは同様 に3本の電極をもつ構造であるが,こちらのタイプは交流DBDによる局所的な 誘電体バリア放電と,直流DBDにより2電極間の誘電体上に延長されたプラズ マとの組み合わせを用いたタイプなどが開発されている.松野ら(36)はスライデ ィング放電アクチュエータにおいて DC 電極側から生成される噴流が SDBD に よる壁面噴流より強く,結果的に強い逆向き噴流が生成するという実験結果を 示した.西田ら(37)は 3 電極アクチュエータの電極配置の検討を行い,プラズマ 電場分布を上方向に広げ,性能向上を目指したアクチュエータを開発した.
電極形状に関する研究は,瀬川ら(38)はドーナツ型上部電極とその内径と同じ外 径を有する円形状被覆電極を配置した DBD-PA を開発した.この電極は印加す ることにより壁面に対し垂直方向に噴流を生成される.また,従来のシート状
DBD-PA は高湿度や雨雪など屋外の使用において沿面放電は深刻な問題である
19
と捉え,実用的な観点から高電圧印加される裏面電極を被覆した紐型のDBD-PA を開発した(39).Poon らはワイヤーを露出電極として用いた DBD-PA の開発し,
性能を評価した(40).Abe らはメッシュ型露出電極を用いた.露出電極に使用す る金属メッシュ切断面に電界が集中することにより,高効率化を目指した研究 も行われている(41).
20
1. 5 DBD-PAの実用機械適用に向けた研究
本項目ではDBD-PAを実用機械に適用向けた研究の一部を抜粋し述べる.
噴流制御
噴流は空調機器や燃焼器などの様々な工業製品に利用されており,噴流の特 性(混合,拡散など)は噴流出口付近生成される大規模渦構造に支配されてい
るため,DBD-PAにより渦構造の制御を行うことができれば,これらの諸特性の
改善が期待できる.
加藤ら(42)は長方形噴流の拡がりを促進または抑制することが可能であることを 示し,宮城ら(43)は同軸型 DBD-PA をバースト波で駆動することによって噴流拡 散を促進できることを示した.
剥離抑制
風車の翼は層流剥離流れの発生が起因した性能低下が生じる.現状では剥離制 御抑制として可変速制御を行われているが,大きな慣性モーメントを持ち,風 変動の時定数制御することは不可能である.そのため理想的な仰角条件稼働し ていないため剥離が生じやすくなる.そこで DBD-PA を用いることで時間平均 の出力向上が期待できるとされる.
また,大型風車は剥離を防ぐために可変速機構に加えて,可変ピッチ機構など の導入などが行われているが,小型風車では価格やメンテナンス性の観点から 導入が困難である.そこで,発電性能の低下を招く剥離流れを抑制する手法で プラズマアクチュエータを用いる手法が有利となる(43)(44).
漏れ流れ制御
タービン翼列は,航空推進用ジェットエンジンやガスタービンなどの用途に広 範囲に用いられ,わずかな性能向上でも高い省エネルギー効果に貢献できる.
とくにタービン翼列の翼先端から発生する漏れ流れ(チップクリアランス流れ) は,空力性能を低下させる大きな原因の一つとなる.そこで最近ではタービン 翼先端にプラズマアクチュータを適用し,漏れ流れを抑える研究が行われてい る(46).
21
騒音低減
空力騒音は渦の生成や崩壊,流れの剥離や再付着に密接に関わり,プラズマア クチュエータは空力騒音低減に有用なデバイスである可能性を秘めている.光 用ら(47)はパンタグラフ舟体の騒音低減の研究を行った.パンタグラフは集電性 能の要件から仰角やすり板磨耗による形状変化に対して揚力特性が過敏でない,
舟体重量が軽い,簡素であるということが求められ,現状の要求項目ではでは 空力音を低減する手法をトレードオフする関係となっている.そこでパンタグ ラフ舟体まわりの流れの剥離制御やカルマン渦生成抑制にプラズマアクチュエ ータを利用した.CFD 解析により,十分な出力を得ることができれば,舟体か らの空力騒音低減手法として,利用可能であるとした.
抗力低減
流れ中に置かれた物体の抗力低減は重要な課題であり,円板に置いては前縁 部に切り欠き部を設けることで抵抗低減されることが知られているが(48),豊泉
ら(49)は同軸型 DBD-PA による抗力低減手法としてフローモーフィング技術の提
案を行った.
22
1.6 噴流制御の従来研究
従来の噴流制御は熱・物質輸送,化学反応,噴霧・微粒化の増進・抑制・パ ターン制御を通じて,工業機器の高性能化,高効率化,小型化,低騒音化など を目的としている.そのため,図7(43)に示すような渦構造の制御によって噴流の 拡散と収束を制御することが主な研究である.制御方法としては多くの研究が 行われており,鈴木ら(50)はフラップ型マイクロ電磁アクチュエータ群を用いた 制御を行い,宮城ら(51)は音波による制御を行った.また,Casey(52)らはLAFPAs による制御を行った.前述のとおり DBD-PA を用いた噴流制御も宮城ら(43)によ って行われている.
これらのような従来の研究は噴流の方向制御については触れておらず,能動 的な噴流方向制御の研究は見当たらない.
また,コアンダ効果による噴流方向の能動的制御の研究も見当たらず, Antonio ら(53)が曲面温度による噴流方向の変化を調べるに留まっており,本研究の新規 性は高いと考えられる.
23
Fig. 7 Conventional jet control study (Miyagi, 2013)
24
1. 7 研究目的
これらの研究背景や従来の研究を考慮し,本研究では DBD-PA を用いた噴流 方向制御技術の開発に向けた基礎実験を行うことを目的とする.この目的を達 成するために,具体的には,①風洞に設置された円柱後流の DBD-PA による制
御,②DBD-PAとコアンダ効果による噴流制御,③自作の噴流生成装置を用いた
実証実験の3点を行うこととする.
25
1. 8 本論文の概要
本論文は4章から構成され,以下に概要を述べる.
第1章「緒論」では,DBD-PAの基本的特性や誘電体バリア放電(DBD)に関す る従来の研究について総括を行い,本研究の目的を述べる.
第 2 章「実験装置及び実験方法」では,本実験に使用した装置を示し,実験 の方法について述べた.
風洞(試験部区間:幅 200×高さ 200 mm)及び自作した小型風洞(出口寸法:幅
40×高さ8 mm)の出口部に曲率を設け,そこにDBD-PAを設置し風向制御特性を
調べた.また,DBD-PA 単体の誘起流特性を調べるために密閉アクリル容器内
(470×520×470 mm)にDBD-PAを設置し実験を行った.
DBD-PAは誘電体にポリイミド箔(厚さ25 μm),電極に銅箔(厚さ35 μm)を用い
作製した.電極は露出電極幅0.5 mm,被覆電極幅を10 mmとしたpeak-to-peak 電圧はVp-p = 4.0 ~ 8.0 kV,周波数はfbase = 5 ~ 20 kHzの正弦波で実験を行い,連 続駆動とバースト駆動で駆動した.バースト駆動の周波数はfb = 5 ~ 500 Hz,Duty 比D = 10 ~ 50 %である.風洞の流速は0.2 ~ 2.0 m/s,小型風洞は1.8 ~ 2.6 m/sの 範囲で実験を行った.曲面の曲率はR = 8 ~ 25 mm,DBD-PA設置位置はα = 0 ~ 270°である.αは曲率の中心から流れ方向に向かって水平にとった位置が基準で ある.スモーク及びベビーパウダーをトレーサとして使用し,カメラで撮影し た.風向変位角度θの測定にはImageJを用い,誘起流速度はPIV計測法で測定 した.
第3章「実験結果及び考察」では,DBD-PAによる風向制御特性,および誘起 流特性の結果についてまとめ,考察を述べた.
DBD-PAが駆動してない状態では,風洞から噴流は流れ方向にほぼ直進するが,
DBD-PA駆動により流れは扇状に拡がって流れるようになることがわかった.つ
まり,DBD-PAにより流れの方向が変化することが示された.その風向の変化角
度をθとし定量的に評価した結果,peak-to-peak電圧および周波数の増加と伴に 増加することがわかった.また,流速によらず設置位置がα = 90~120°で風向制 御力は最大となった.出口部の曲率が小さいほど風向の変化角度 θ が大きくな る.一方,バースト周波数fb = 500 Hzでは連続駆動と同じジェット状の流れに
なり,fb = 5, 50 Hz では拡散した流れとなった.Duty比を減少させても風向制御
能力は若干の減少にとどまる傾向があり,バースト駆動により消費電力あたり の風向制御能力を向上させることが可能となることを示唆した.
第4章「結論」では,本研究から得られた研究成果のまとめを行った.
26
1.9 本論文の使用記号
wt : 露出電極幅 [mm]
wb : 被覆電極幅 [mm]
wl : 電極スパン方向幅 [mm]
d : 電極間距離 [mm]
td : 誘電体厚さ [mm]
tt : 露出電極厚さ [mm]
tb : 被覆電極厚さ [mm]
Vp-p : 電圧振幅 [kV]
fbase : 基本周波数 [kHz]
fb : バースト周波数 [Hz]
V : 誘起噴流速度 [m/s]
Q : 流量 [m3/s]
T : 印加電圧時間 [s]
D : Duty比 [%]
RH : 湿度 [%]
U : 風洞流速 [m/s]
α: DBD-PA設置角度 [°]
𝜃 : 噴流角度 [°]
𝜃′ : 噴流角度変化 = 𝜃(DBD-PA on) - 𝜃(DBD-PA off) [°]
27
2 章
実験装置および方法
28
2. 実験装置および実験方法 2. 1 本実験の DBD-PA 2. 1.1 DBD-PAの作製
本研究では,DBD-PAを構成する材料として誘電体にポリイミドフィルム(厚さ 25μm) とPTFE (厚さ200μm),表裏電極に銅箔 (厚さ35μm)とする両面銅張積層 板を用いた.DBD-PAの作成は誘電体フィルムに銅テープを非対称的に貼り付け るだけで可能である.本研究では DBD-PA の厚さが流れに与える影響を最小限 とするために, 風洞制御実験においてはポリイミドを用いた.また, バースト波
で DBD-PA を駆動した場合の誘起流の解析には PTFE を用いた.ポリイミドフ
ィルムを用いたのは厚さが25μmと薄く, DBD-PAを取り付けることによる抵抗 を極力減らすことができるためである.また, PTFE を用いたのは規格が統一さ れていること, そして, 先行研究(54)と比較することが可能であるためである.
2. 1. 1-1 PTFE製DBD-PA の作製
図 1(a)に Polyimide-Type の寸法は示すように露出電極幅 0.5mm, 被覆電極幅
10mmとした.Polyimide-Type は設置面にカプトンテープと銅テープを交互に張
り付けて自作したものを使用した.
2. 1. 1-2 PTFE製DBD-PA の作製
図1(b)に PTFE-Typeの寸法を示す.露出電極幅0.1 mm, 被覆電極幅10mmと
した.PTFE によるDBD-PA は下記に記す PCB プロセスによるエッチングを用
いた.
プロセスの概略を図2 に示す.PCB プロセスを行う前に図3 に示すように露出 電極および被覆電極の設計を行う.
PCBプロセス
1) PTFEなどの誘電体フィルムに銅箔をラミネート加工する.
2) 銅箔にレジスト層をコーティングする
3) DBD-PAのパターンを用意し, UVライトを透過させる.UVをあてられたレジ
スト層は化学的に変化する.
4) エッチング溶液に浸し, UVに当てられていないレジスト層と銅箔を取り除く
5) UVを照射し, 変化した層を取り除く.
以上のプロセスで均一かつ精密な構造のDBD-PAの作製が可能となる.
29
(a) Polyimide-Type (b) PTFE-Type Fig.1 DBD-PA designs
Fig. 2 PCB process etching
30
(a) Expose electrode
(b)
(b) Encapsulated electrode Fig. 3 DBD-PA design pattern sheets
31
2. 1. 2 誘起流速度分布測定
本研究にあたり, DBD-PAの誘起流の速度分布測定には粒子イメージ速度計測 法(Particle Image Velocimetry, PIV)計測を用いた.PIVの測定原理として,流れに 微細なトレーサ粒子を導入し,これをパルスレーザなどの光源で照射する.照 射されたトレーサ粒子は図 4 に示すようにハイスピードカメラで 2 時刻の瞬間 的な粒子画像として記録され,2時刻のΔt における粒子画像の移動量から流れ 場(x, y)断面内の速度ベクトル(u, v)を求める. 2 – 3マイクロ秒で計測できるこ の手法は航空機などの速度場の計測も可能とし,一般的に風洞試験におけるPIV 計測における誤差率は3 – 5%程度とされている(34).
実験装置の概略は図 5 に示す.DBD-PA はアクリル製密閉容器内(縦 470×横
520×高さ 470 mm)に固定され,可視化粒子としてベビーパウダーを容器内へ導
入する.PIVでは壁面近傍の流速を測定することができないため,DBD-PAは周 囲より高い位置にある台座に固定した.誘起噴流は赤色レーザー(DPRLu-5W, 日本レーザー)で可視化され,トレーサ粒子の動きをハイスピードカメラ (FASTCAM-Mini,Photron,1024 × 1024 pixels,フレームレート1000 fps)で撮影
した. DBD-PAの誘起噴流のx – y断面の速度ベクトル(u, v)は,PIV計測を用い
て解析を行った.PIV解析結果はPTV解析結果をPIVに変換して求めた.解析 にはPIV解析ソフト(Flow Expert, Fotron)を用いた.PIVの撮影条件の詳細は表1 に示す.
Fig.4 Explanation of PIV
32
Fig.5 Schematic image for PIV measurement
Table.1 Experimental conditionsof PIV
Waveform of applied voltage unit continuous burst burst burst
Peak-to-peak voltage kV 6 6 6 6
Base frequency kHz 20 20 20 20
Duty ratio D % 100 50 50 50
Burst frequency Hz - 500 50 5
33
2. 2 円柱後流のDBD-PAによる制御
本研究では風洞と緑色レーザー(DPGL-2W,日本レーザー)を用いてスモーク ワイヤ発生装置(MS-405,SUGAWARA)およびワイヤーによるスモークワイヤ法 で可視化し,デジタルカメラ(EOS-6D,Canon)で撮影した.撮影した動画はImageJ によって角度を測定した.DBD-PAはPolyimide-Typeを用い,円柱直径は32 mm を使用した.表 2 に実験条件を記す.風洞装置は図 6 に示すエッフェル型風洞
(HD-11-1特,本田工業)を用いた.風速の調整は風洞吹き出し口においた風速計
(ANEMOMASTER LITE-6006,KANOMAX)を用いて測定した値を基に設定し
た.風洞試験部区間は幅200 mm×高さ200 mmである.
本研究では,DBD-PA はファンクションジェネレータ (WF1947,エヌエフ回 路設計ブロック)で peak-to-peak 電圧,周波数,波形を設定し,電力増幅器 (PSI-PA1050,PSI-PW0500,PSI-TR,PSI) を使用して作動させた.波形は正弦波 とし,図7(a)に示す連続波と図7(b)に示すバースト波で実験を行った.
図 8 に実験装置概要を示す.スモークワイヤ法によって発生する煙は浮力に よって上昇してしまうため,浮力の影響を受けないように横向きに測定した.
DBD-PA は円柱に沿って取り付けた.円柱を回転させることで流れに対する
DBD-PA の設置位置を変更させた.図 9 に流れに対して設置した DBD-PA の位
置を示す.DBD-PAの露出電極と被覆電極の接点を基準点とし,円柱中心から流 れ方向への角度を0 としたDBD-PA 設置角度 α を設定する.DBD-PA の設置位 置は0°から180°までは30°ごとに測定するが,円柱の剥離点近傍である80°の位 置も測定を行う.図10に実験結果の定量的な評価方法を示す.風洞による流れ 方向を0とし,円柱の中心方向への傾きを正の値とするθを設定した.
34
Fig.6 Eiffel style wind tunnel
(a) Explanation of Continuous wave
(b) Explanation of Burst wave Fig. 7 Explanation of wave
35
Table.2 Experimental conditionsof DBD-PA and wind tunnel Peak-to-peak voltage kV 6
Base frequency kHz 10
Burst frequency Hz 2.5, 25, 250
Duty ratio % 50, 100
Wind-tunnel flow rate m/s 0.2, 0.5, 1.0, 1.5, 2.0
Reynolds number 420, 1060, 2100, 3200, 4200 Diameter of cylinder mm 32
Angle at DBD-PA installed ° 0, 30, 60, 80, 90, 120, 150, 180, 270
Temperature ℃ 18.9~19.3
Humidity % 45~67
36
Fig.8 Schematic of experiment equipment
37
Fig.9 Position of DBD-PA relative to flow
Fig.10 Method of wind direction evaluation
38
2. 6 DBD-PAとコアンダ効果による噴流制御
円柱後流同様の実験装置を用いる.表3に実験条件を記す.図11に実験装置概 要を示す.風洞吹き出し口側面に半円柱を設置し,風洞と半円柱の境にDBD-PA の露出電極と被覆電極の境が重なるように取り付けた.図12に実験結果の定量 的な評価方法を示す.風洞の吹き出し口から風洞の流れに水平な方向を0とし,
風洞による流れ方向を 0 とし,円柱の中心方向への傾きを正の値とする θ を設 定した.
Table.3 Experimental conditionsof DBD-PA and wind tunnel Peak-to-peak voltage kV 6
Base frequency kHz 10
Burst frequency Hz 2.5, 25, 250
Duty ratio % 50, 100
Wind-tunnel flow rate m/s 0.2
Curvature radius mm 16
Angle at DBD-PA installed ° 90
Temperature ℃ 16
Humidity % 38
39
Fig.11 Schematic of experiment equipment
Fig.12 Method of wind direction evaluation