電気自動車における全電気ブレーキシステムの協調制御特性
Cooperative Control Characteristics of Full Electric Braking System for Electric Vehicles
精密工学専攻
21
号 後藤 淳一Junichi Goto
1. 緒言
近年,地球温暖化を始めとする環境・エネルギー問題によ り,低燃費車や電動技術応用車への市場ニーズが高まってお り,これらを解決する次世代の自動車として電気自動車(EV) が注目されている.EV の特徴として回生ブレーキの技術に より,高精度,高応答なブレーキ力の発生,及びエネルギー 回収が可能といった利点が挙げられる.
また自動車機器においても更なる高性能,高効率化が要求 されるようになり,エレクトロニクス技術を活かした電動化 が進められている.ステアリングやブレーキ,アクセルが完 全に電子制御化されることで,これまでの個別制御から統合 制御化への流れが加速し,安全性や快適性の向上が期待でき る(1).ブレーキ分野においても従来の油圧システムに代わり,
サーボモータでブレーキパッドを押し付ける電動ブレーキ の研究開発が行われている(2)(3).しかしコストと電動部の信 頼性に課題があり,実用化には至ってない.
このような背景から本研究室では将来のブレーキシステム として回生ブレーキと電動ブレーキを併用した全電気ブレ ーキシステムを提案しており,その基本構想と摩擦係数等の パラメータ変動に対する制御手法を検討してきた(4)(5).しか しシミュレーション上では可能しているブレーキトルクの 検出や,協調制御における問題点はシミュレーションの域を 脱せず実機による検討は行われていない.
そこで本研究では,車両慣性を模擬した実験システムを試 作し,全電気ブレーキシステムの特徴を活かした新たな制御 システムを提案し,実験検討を行う.また電動ブレーキのパ ラメータ変動に対する効果を検討する.
2. 全電気ブレーキシステム
2.1 全体構成
Fig.1に全電気ブレーキシステムの全体構成を示す.
Motor , Inverter
Brake disc
Wedge brake
Battery Controller
Pedal unit Tire
Brake force
Brake force
Brake force Brake force
各輪にモータと電動ブレーキが取り付けられており,各輪 のブレーキ力はそれぞれ独立に制御される構造である.
2.1.1 回生ブレーキ 回生ブレーキはモータ の誘起電圧を利用したブ レーキで,高精度,高応 答なブレーキ性能と同時 に,制動エネルギーを回 収できるという利点を持 っている.Fig.2は回生ブ レーキの最大トルク特性
であるが,低速域では誘起電圧の低下により,また高速域で はモータの弱め界磁制御の影響により最大ブレーキトルク が制限される.そのため不足分のブレーキトルクを補う装置 が必要となる.
2.1.2 電動ブレーキ
本研究の特徴として,電気ブレーキトルクの不足を補うた めに,ウェッジ機構を備えた電動ブレーキを導入している
(2)(3).Fig.3に概要図,Fig.4にモデル図を示す.電動ブレーキ
は従来の油圧による駆動をサーボモータに置き換えること で,高精度,高応答な押し付け力の制御を可能としたブレー キ装置である.またウェッジの巻き込みにより,トルクの自 己増幅機能を発生させることができ,電力消費を少なくする ことができる.
Caliper Servo motor
Wedge Brake pad
Brake disc
Caliper Servo motor
Wedge Brake pad
Brake disc
FM
TM
FN
KCAL
FA
FB
XW
α
Motor
Roller Screw
Wedge Abutment Brake pad
FB
Brake Disc
τSM
disc
screw
xW
fSM
fN
fA
fB
fB
Servo motor
FM
TM
FN
KCAL
FA
FB
XW
α
Motor
Roller Screw
Wedge Abutment Brake pad
FB
Brake Disc
τSM
disc
screw
xW
fSM
fN
fA
fB
fB
Servo motor
Fig.3 Configuration of wedge brake Fig.4 Model of wedge brake パッドとブレーキディスクが接触した位置をウェッジ位置 xwの原点とする.ここでウェッジ角α,キャリパ剛性KCAL, ブレーキパッドとディスクの摩擦係数をμB,ブレーキ有効 半径をrBするとブレーキトルクτBは式(3)で表せる.
α µ
τW(t)=2 BrBKCALxW(t)tan (1) Fig.2 Characteristic of
electric brake torque
Vehicle speed Regenerative braketorque Low speed area
Field weakening area
Vehicle speed Regenerative braketorque Low speed area
Field weakening area
Control signal Power supply line Fig.1 The configuration of full electric brake system
2.2 制御方式の問題点
Fig. 5 に従来方式であるオープンループ方式のブロック線
図を示す.オープンループ方式では回生ブレーキがその状況 での最大トルクを出力し,不足分を電動ブレーキが補う構成 となっている.最もシンプルで回生ブレーキを最大限利用で きるためエネルギー効率がよいが,トルクフィードバックを 行っていないため,電動ブレーキにパラメータ変動が生じた 場合に正確にブレーキトルクを制御できないという問題が ある.
しかし運動エネルギーを回収できる回生ブレーキと,従来 の油圧より高応答,高精度な電動ブレーキを組み合わせるこ とで,エネルギーをできるだけ回収しつつ,所望の制動距離で 車体を確実に停止させるブレーキ制御が期待できる.この制 御は将来の自律運転システムにも適用できると考えている.
そこで本研究では回生ブレーキと電動ブレーキの協調制御 の検討を行うために実験システムを試作し,回生ブレーキを 最大限利用し,指定する制動距離内に車体を確実に停止させ る新たな制御システムを実験検討する.
3. 実験システム
3.1 全体構成
試作した実験システムの写真をFig.6, 7 に示す.装置は実 車のブレーキ性能(ブレーキトルク)の1/50を基準として模 擬したものであり,機械部は約 1050mm,幅 250mm,高さ
350mm の大きさとなる.構成は主に機械部と回路部に分け
られる.機械部は駆動,電気ブレーキ用モータ部,車両模擬 部,電動ブレーキ部から構成される.
3.2 駆動,回生ブレーキ用モータ,車両模擬部
駆動及び回生ブレーキ用モータは200W DC サーボモータ を使用した.モータの仕様と機械部のパラメータを Table 1 に示す.なお慣性モーメント等のパラメータは,すべてモー タ軸換算で表記する.
3.2.1 回生ブレーキの概要
電力変換回路部分は三菱電機製ASIPMを使用し,三相イン バータの二相分のみを使用して H 型ブリッジを構成してい る.回生ブレーキ時のH型ブリッジ回路の動作をFig.8に示
Experiment Inertia kg・m2 0.0201
Gear Ratio 9
Maximum Motor Torque Nm 3.64
Maximum Motor Speed rpm 3000
Torque Constant N・m/A 0.119
Encorder Specification ppr 4000
(a) VN ON (b) VN OFF Fig.8 Circuit operation of regenerative brake
す.なお,本研究では消費電力,バッテリ量によるトルクの 制限などの検討は行わないため,バッテリの代わりに安定化 電源を使用し,回生電流はブレーキ抵抗で消費させる.
回生ブレーキは電源がモータ誘起電圧に置き換わった昇圧 コンバータの一種とみなすことができる.VNが ONの時,
モータの誘起電圧によって短絡電流が流れ,インダクタンス に電気エネルギーを蓄えると共に制動作動を行う(Fig.8 (a)).
そしてVNをOFFにするとインダクタンスに蓄えられた電気 エネルギーがバッテリ(ブレーキ抵抗)に返還(回生)され,引 き続き制動トルクが働くことになる(Fig.8 (b)).
3.2.2 回生ブレーキの特性
回生ブレーキは電流制御によりブレーキトルクを制御する.
本実験システムの回生ブレーキの電流応答波形をFig.9に示 す.各電流とも次第に電流値が低下している.これはモータ 回転速度が低下することでモータ誘起電圧が低下し,インダ クタンスに十分な電気エネルギーを蓄えることができない ためである.
Fig.7 Circuit department of brake simulated experiment Table 1 Experimental parameters
Fig.6 Machinery department of brake simulated
Br RB
VBc
VN
UP
UN
VP
- + EM
RM LM
iM
VP
- + UP
UN
EM
VN
RM LM
RB
VBc
Br
iM
Br RB
VBc
VN
UP
UN
VP
- + EM
RM LM
iM
Br RB
VBc
VN
UP
UN
VP
- + EM
RM LM
- + EM
RM LM
iM
VP
- + UP
UN
EM
VN
RM LM
RB
VBc
Br
iM
VP
- + UP
UN
EM
VN
RM LM
RB
VBc
Br
VP
- + UP
UN
EM
VN
RM LM
RB
VBc
Br
iM
Fig.5 Open loop brake system using wedge brake
Brake Torque Command
Regenerative Brake Torque Total
Brake Torque
Vehicle Speed
Friction Brake Torque Motor
Vehicle Dynamics Wedge
Brake +
+ - +
torque
brake torque brake
torque speed
dynamics brake
brake torque command
Brake Torque Command
Regenerative Brake Torque Total
Brake Torque
Vehicle Speed
Friction Brake Torque Motor
Vehicle Dynamics Wedge
Brake +
+ - +
torque
brake torque brake
torque speed
dynamics brake
brake torque command
Fig.9 Response of current control for regenerative
Motor for driving
& regenerative brake Equivalent inertia
Weight of vehicle Reduction gear Electromech.
brake Motor for
Electromech. brake Motor for driving
& regenerative brake Equivalent inertia
Weight of vehicle Reduction gear Electromech.
brake Motor for
Electromech. brake
Microcomputer
Interface Circuit for Power inverter
Interface Circuit for electromech.
motor Power inverter
circuit Electromech.
motor driver
Microcomputer
Interface Circuit for Power inverter
Interface Circuit for electromech.
motor Power inverter
circuit Electromech.
motor driver
-3 -2 -1 0 1 2 3 4 5 6
0 2 4 6 8 10
Time s
Motor current A
-3 -2 -1 0 1 2 3 4 5 6
0 2 4 6 8 10
Time s
Motor current A
3.3 電動ブレーキ
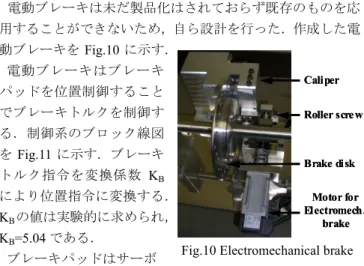
電動ブレーキは未だ製品化はされておらず既存のものを応 用することができないため,自ら設計を行った.作成した電 動ブレーキをFig.10に示す.
電動ブレーキはブレーキ パッドを位置制御すること でブレーキトルクを制御す る.制御系のブロック線図
をFig.11 に示す.ブレーキ
トルク指令を変換係数 KB
により位置指令に変換する.
KBの値は実験的に求められ,
KB=5.04である.
ブレーキパッドはサーボ
モータのモータ電流,角速度,回転角のフィードバック信号 を用いた多重ループ制御によって位置制御する.各制御系は PI補償によって制御する.
Fig. 11 Position control system for electromechanical brake 3.4 制御装置
Fig. 12に制御装置の構成を示す.制御装置の回路は駆動,
電気ブレーキ用モータと電動ブレーキ用モータでそれぞれ 分離されており,マイコン同士が同期動作を行う構成である.
制御方法は駆動,
回生ブレーキ用モー タは速度制御と電流 制御,電動ブレーキ用 モータは市販のドラ イバで電流制御をす るため,電動ブレーキ 用マイコンでは速度 制御と位置制御を基 本としている.また4 章で提案する加速度 制御は回生ブレーキ 用マイコンで演算す る.
4. 加速度制御
ある距離で必ず停止させるということは,制動距離を制御 することである.制動距離は一般的に(1)式,停止時間TB[s]
は(2)で表すことができる.但しSBは制動距離[m],V0は初 速度[m/s],αは平均減速度[m/s2]である.
α 2
2
V0
SB= (2) α0
TB=V (3)
上記式より減速度αが大きければ大きいほど、制動距離は 短くなる.これより制動距離を制御するためには,減速度を 制御すればよい.
Fig. 13は今回提案する加速度制御系である.制動距離指令
SB*をα*に変換した後,加速度を制御する.コントローラは PI補償とし,PIゲインはブレーキトルクを一次遅れ系と仮定 して設計した.加速度はエンコーダからの速度信号を微分し,
一次のローパスフィルタを介して得る.
Fig.13 Acceleration control system
5. 実験検討
製作した実験システムにおいて,全電気ブレーキシステム の加速度制御による実験検討を行った.
4.1 実験条件
実際の自動車において,乾いたアスファルトでは 6.86m/s2 が急ブレーキ,2.94m/s2が通常ブレーキとなる.本実験では 車両模擬部の半径r=0.1mであるので,3.92m/s2(=39.2rad/s2), 2.94m/s2(=29.2rad/s2),1.92m/s2(=19.6rad/s2)について実験を行 う.初速度は1000rpmとし,記録開始から2秒後に加速度制 御による制動を行う.但し,ブレーキを使用せず惰性による
減速度は11.8rad/s2,電動ブレーキが出力できる最大減速度は
13.7rad/s2である.
4.2 ステップ状加速度指令による検討
各加速度指令に対する,制動距離と停止時間の理論値と実
験値をTable 2 に示す.また速度応答波形をFig. 14に,加速
度波形と回生ブレーキ電流波形をFig.15 ~Fig.17に,電動ブ レーキのブレーキパッドの位置をFig. 18示す.
Table 2 Experimental result
Fig.14 Velocity response of acceleration control Fig.12 Configuration of control system
braking distance rad stop time s braking distance rad stop time s
39.2rad/s2 139.8 2.67 174.9 3.31
29.2rad/s2 187.7 3.59 207.1 4.42
19.6rad/s2 279.6 5.34 276.5 5.38
theoretical value experimental value Js 1 ΩW(s)
) (s
T∗ TL(s)
Vehicle speed Brake torque
command
Travel resistance Braking distance
command
+
-
+ -
+1 Ts
s
) (s SB∗
s K s Kpa+ ia
Regenerative brake
Wedge brake )
∗(s α
) α(s Deceleration Deceleration
command
Total brake torque
) (s T
+ -
+
+ Command
transform Js
1 ΩW(s)
) (s
T∗ TL(s)
Vehicle speed Brake torque
command
Travel resistance Braking distance
command
+
-
+
-
+ -
+ -
+1 Ts
s
) (s SB∗
s K s Kpa+ ia
Regenerative brake
Wedge brake )
∗(s α
) α(s Deceleration Deceleration
command
Total brake torque
) (s T
+ -
+ -
+
+
+
+ Command
transform
Fig.10 Electromechanical brake
Power inverter circuit Motor current
PWM (Brake) command Dedicated driver
Motor current Position pulse
Current command voltage
Encoder pulse
Interface circuit
Microcomputer Feedback
signal’s
PWM Current
voltage
Current (Brake) command
Interface circuit
Microcomputer Feedback
signal’s
Motor for Driving &
electric brake
Electromechanical brake
Encoder
Motor for electromechanical
brake
Acceleration command Power inverter circuit
Motor current
PWM (Brake) command Dedicated driver
Motor current Position pulse
Current command voltage
Encoder pulse
Interface circuit
Microcomputer Feedback
signal’s
PWM Current
voltage
Current (Brake) command
Interface circuit
Microcomputer Feedback
signal’s
Motor for Driving &
electric brake
Electromechanical brake
Encoder
Motor for electromechanical
brake
Acceleration command
-200 0 200 400 600 800 1000 1200
0 2 4 6 8
Time s
Velocity rpm
=39.2rad/s2 29.2rad/s2 19.6rad/s2
α
-200 0 200 400 600 800 1000 1200
0 2 4 6 8
Time s
Velocity rpm
=39.2rad/s2 29.2rad/s2 19.6rad/s2
α Motor for
Electromech.
brake Roller screw
Brake disk Caliper
Motor for Electromech.
brake Roller screw
Brake disk Caliper
Dead band Wedge
position
Brake torque Brake torque
command
τW
Wedge position Control system
Disturbance torque Wedge position
command
KB Wedge brake
dynamics XW
∗
XW
∗
τW
τD
Dead band Wedge
position
Brake torque Brake torque
command
τW
Wedge position Control system
Disturbance torque Wedge position
command
KB Wedge brake
dynamics XW
∗
XW
∗
τW
τD
(a) Deceleration (b) Motor current
(a) Deceleration (b) Motor current
(a) Deceleration (b) Motor current
Table 2より,α=39.2rad/s2,29.2rad/s2では制動距離,停止 時間ともに長くなっている.これはFig.15,Fig. 16で明らか なとおり回生ブレーキトルクの減少と共に所望の減速度が 得られていないためである.減速度が減少する原因として,
ブレーキ開始直後は回生ブレーキのみ,または回生ブレーキ と電動ブレーキで所望のブレーキトルクを得ることができ るが,それ以降からはモータ回転速度の低下による誘起電圧 の低下によって回生ブレーキトルクが減少するため,不足分 を電動ブレーキが補う.しかし電動ブレーキが出力できる最 大減速度よりも不足分の方が大きいため,総ブレーキトルク が不足し,結果的に減速度が得られないためだと考えられる.
α=19.6rad/s2ではFig. 17より,回生ブレーキのトルク不足分
を電動ブレーキトルクが補っているため,所望の減速度を得 られることができ,理論値とほぼ同じ実験結果となる.
Fig. 18より,回生ブレーキのみで十分減速度を得られる場
合でも,電動ブレーキの立ち上がり時にブレーキパッドがデ ィスク接触面(3.7rad)を超えている.これによって余計なブレ ーキトルクが発生するので,改善する必要がある.
4.2 パラメータ変動がある場合の検討
次に電動ブレーキの変換係数 KBに誤差を与えた場合につ いて検討する.変換係数KBに―10%,―20%の誤差を与えた 場合の加速度制御における速度応答をFig.19 に示す.但し,
減速度指令は19.6rad/s2である.
Fig.19 Velocity response of acceleration control include error
Fig.19 より変換係数 KBに大きな誤差が生じても応答に影
響しないことがわかる.これは変換係数KBの誤差が加速度 制御系の内側ループにあるため,加速度コントローラが補償 することで減速度に影響がでないと考えられる.
6. 結言
回生ブレーキと電動ブレーキの協調制御検討について以下 の結果を得た.
(1) 電動ブレーキを専用設計し,車両慣性を模擬した全電気 ブレーキシステムの実験システムを試作した.各ブレー キの基本特性を明らかにした.
(2) 回生ブレーキを最大限利用する加速度制御系を構成し,
減速度を制御することで指定する制動距離内に確実に 停止させることを実験によって実証した.
今後の課題として,ブレーキ力をより出力できる電動ブレ ーキの設計を行う.また乗り心地やタイヤ-路面間のスリッ プ等を考慮した制御システムの検討を行う.
参考文献
(1) 小川計介 他, ステアリング,ブレーキで進む X-by-Wire への道, 日経 Automotive Technology, 日経 BP 社, 東京 (2007.4) pp.74-93.
(2) Richard Roberts, et al., Modeling and Control of a Single Motor Electronic Wedge Brake, SAE Technical Papers, Document Number 2007-01-0866 (2007)
(3) M. Semsch, New mechatronic part disc brake, Advanced Brake Technology, SAE Book R-352, (2003) pp.205-227 (4) Sakamoto T., Hirukawa K., Ohmae T., Cooperative Control
of Full Electric Braking System With Independently Driven Four Wheels, IEEE Advanced Motion Control 2006, Part2 (2006.3) pp. 602-606.
(5) 比留川国朗,電気自動車における回生ブレーキと電動ブ レーキの協調制御システム,中央大学大学院修士論文
(2006) Fig.15 Response of acceleration control (39.2 rad/s2)
Fig.16 Response of acceleration control (29.2 rad/s2)
Fig.17 Response of acceleration control (19.6 rad/s2)
-200 0 200 400 600 800 1000
0 2 4 6 8
Time s
Velocity rpm
-200 0 200 400 600 800 1000
0 2 4 6 8
Time s
Velocity rpm
-3 -2 -1 0 1 2 3 4 5 6
0 2 4 6 8
Motor current A
Time s
-3 -2 -1 0 1 2 3 4 5 6
0 2 4 6 8
Motor current A
Time s
-40 -20 0 20 40 60 80
0 2 4 6 8
Time s
Deceleration rad/s2
-40 -20 0 20 40 60 80
0 2 4 6 8
Time s
Deceleration rad/s2
-3 -2 -1 0 1 2 3 4 5 6
0 2 4 6 8
Time s
Motor current A
-3 -2 -1 0 1 2 3 4 5 6
0 2 4 6 8
Time s
Motor current A
-40 -20 0 20 40 60 80
0 2 4 6 8
Time s
Deceleration rad/s2
-40 -20 0 20 40 60 80
0 2 4 6 8
Time s
Deceleration rad/s2
-3 -2 -1 0 1 2 3 4 5 6
0 2 4 6 8
Time s
Motor current A
-3 -2 -1 0 1 2 3 4 5 6
0 2 4 6 8
Time s
Motor current A
-40 -20 0 20 40 60 80
0 2 4 6 8
Time s
Deceleration rad/s2
-40 -20 0 20 40 60 80
0 2 4 6 8
Time s
Deceleration rad/s2
Fig.18 Brake pad position of acceleration control
0 1 2 3 4 5 6
0 1 2 3 4
Time s
Brake pad position rad
=39.2rad/s2
α
α=19.6rad/s2
=29.2rad/s2
α
0 1 2 3 4 5 6
0 1 2 3 4
Time s
Brake pad position rad
=39.2rad/s2
α=39.2rad/s2
α
α=19.6rad/s2
α=19.6rad/s2
=29.2rad/s2
α=29.2rad/s2
α