理論計算機科学とその周辺 研究集会 1992.1.29-31 LOTOSによる分散システムの全体記述と各ノードの 動作記述
-
等価性と変換アルゴリズムについて -東野輝夫, 安本慶一, 谷口健一 大阪大学基礎工学部情報工学科Service Specification
andProtocol Specifications in
LOTOS
-
Equivalence and Synthesis
-Teruo Higashino, KeiichiYasumoto andKenichi Taniguchi
Department of Information andComputer Sciences
Osaka University, Osaka560Japan
Abstract
LOTOS is a language developed within ISO for the
formal description of communication protocoIs and
distributed systems. In LOTOS, requirements for a
distributedsystemarecalleda“service specification“. Each
node exchangessynchronization messages to ensure the
temporalordering for theexecution ofeventsinaservice
specification. Theactions of each node
are
describedas
a“protocol specification“. In this paper, we introduce a
method to derive protocol specifications from a service
specificationwritten inaLOTOS based language. Inorder
toderive the protocolspecifications,wemakethe syntax treeofagivenservice specification and givesomeattributes
foreach node inthe tree. The protocolspecificationsare
derived automaticallybyevaluating theseattributes.The
derived protocol specifications satisfy the given service
specification.Wealso explainaLOTOS simulator forthe
execution ofderivedprotocolspecifications.
1. Introduction
LOTOS$(1- 4)$isalanguage developed withinISOfor the
formal description of communication protocols and
distributedsystems. Recently,thespecificationsofmany
OSI protocols
are
described in LOTOS$(2,6)$.
Requirements for
a
distributed systemare
describedas a”service$specification^{\prime\prime(7)}$
.
InLOTOS,service primitives ofeach nodein adistributedsystem
are
called $events^{\prime 1}$,andthe temporal ordering of the execution of events are
described
as
aservicespecification. Onthe protocollevel,several nodes cooperate to provide the required service.
They exchange synchronization messages to
ensure
thetemporal ordering of the execution ofevents through a
communication medium. In thecommunication medium,
we
assume
thatthere isa
communication channel fromeachnode $i”$toanyothernode $j^{t\prime}$,and that thecommunication
channel is modeled
as
aFIFO queue whose capacity isinfinite. The actions of each node are described
as
a“protocol specification“. That is,aprotocol specification of
anode specifiesthe temporalordering oftheexecutionof
both the events of the node and sending/receiving
interactions of synchronizationmessages.
Inorder to getprotocolspecifications satisfyingagiven
service specification, therearetwotechniques:(l)analysis
and (2)synthesis. Verification and testing are analysis
techniques. These techniques
are
usedfor detecting designerrors
suchas
deadlocks,unspecified receptions andso on.Although
some
analysis techniqueshavebeen proposedtodetermine whether givenprotocol specificationssatisfy a
service specification, usuallyit takes muchtimeto
ensure
that given protocol specifications satisfy a service
specification. Asatechmquetodesign distributedsystems,
it is desirable that the designerdescribes only aservice
specification and protocolspecificationscanbederived from
the service specification automatically. Some synthesis
techniques have been proposed$(8- 14)$
.
In thispaper, wewill introduce a synthesis technique to derive protocol
specifications from
a
service specification written in aLOTOS based language. This synthesis technique
uses
only service specifications and it does not require any
furtherinformation. The technique has been proposedin
Ref. (15)andextended in
Ref:
(16-21). Thispapergivesa surveyfor this synthesis technlque.Inorder to observe theexecution of LOTOSprograms,
some
LOTOS simulators (interpreters) have beendeveIoped. These simulators are used for simulating theexecution ofservicespecifications. In order
tosimulate theexecution ofprotocolspecifications,weneed
thefacility fortheexchangeof synchronizationmessagesin additionto theordinary facilities of LOTOS simulators. We
have developedaLOTOS simulator PROSPEX(PROtocol
SPecification EXecutor) for the execution of protocol
specifications(24). Supposethatthereare $N$nodes in a
distributedsystem. We
use
$N$ PROSPEX tosimulate $N$protocolspecifications. That is, eachPROSPEX simulates
a protocol specification and exchanges synchronization
messageseach other.
InSection2,
we
introduceaLOTOS based language for describing service specifications. InSection3, amethodfor deriving protocol specifications from a service
specification is explained. Our LOTOS simulator
PROSPEX is introduced inSection4. 2. Service Specifications
2.1 LOTOS
In LOTOS,
a
distributed system is describedas
acollectionofprocesses. A specialprocessistreated
as
themainprocess. Aprocessconsistsofabehavior expression
(asequenceof eventsandoperators)where
some
operatorsdefine thetemporalordering of theexecution ofevents. Let
$P$ and $B$ be a process and a behavior expression,
respectively. Aprocess definition is describedas $P:=B”$.
Iftheprocess$P$isinvoked,thentheeventsinthebehavior
expression $B$ areexecuted. The following operatorsare usedin behavior expressions.
(1)Thesequentialexecutionofsimpleinteractions“;“
A behavior expression $|\prime a$ ; $B’$ represents that the
behaviorexpression $B”$is executable after theevent $a”$is
executed.
(2)Non-deterministic choice of alternatives $[]’$
Abehavior expression $B_{1}$ $[]$ $B_{2’’}$ represents thatonly
one
ofthebehavior expressions $B\iota’’$and $B2”$isexecuted.If
an
eventin $B_{1’’}$isexecuted,thenonlythe eventsin $\prime B]’$are
executableandthe eventsin $B2’$are
notexecuted.(3)Independent parallelism $111”$
Abehavior expression $B_{1}111B_{2’’}$represents thatboth
behavior expressions $B_{1^{1\prime}}$ and $B2’$ are executable in parallel. The events in $B_{1}$ and $\uparrow\prime B_{2}$“ are executed
(4)Dependent parallelism withrendezvousinteractions“Il”
A behavior expression $B_{1}\downarrow[g1,..,g_{n}]1B_{2^{t\prime}}$ represents that both behavior expressions $||B_{1}$ ‘ and $B_{2’’}$ are
executable in parallel. The events in $B_{1}$ and $B2”$
belongingto $\{g1,..,g_{n}\}$ mustbe executed as rendezvous
interactions. If alleventsin $B1”$and $B_{2’’}$
are
contained in$\{g\iota\cdot.,g_{n}\}$, then$|\prime B_{1}\downarrow[g1,..,g_{n}]1B_{2^{\prime 1}}$ maybedescribed
as
$\prime\prime B_{1}$ I$B_{2’’}$
.
(5)Sequentialcomposition $>>’’$
A behavior expression $B_{1}>>B2’’$represents that the
behavior expression $B_{2’’}$is executable aftertheexecution
of thebehavior expression $B1”$isfinished successfully.
(6)Disablingoperator“$[>’’$
Disablingoperator$”[>’’$ represents theinterruption ofa
particular sequence of events by
a
disabling event. A behavior expression$|\prime B_{1}[>B2’’$representsthat thebehaviorexpression $B\iota’’$ is executable until
an
event $|d’’$ of thebehavior expression $B2”$is executed. If $d”$isexecuted,
then only theeventsin $B2”$
are
executable.As anotheroperator, there is thehiding operator(see
Ref. $(1,4))$
.
An algebraic language ACT ONE isusedtorepresent thevalues and data structuresin LOTOS. A
sub-language ignoring the values and data structures in LOTOS is called”Basic LOTOS“.
2.2 Language to Describe Service Specif\ddagger cations The specification language used in
our
derivation algorithmis functionally equivalenttoBasicLOTOS, exceptthat the disabling operator and hiding operator
are
notsupported. The language is used todescribe bothservice
specifications and derived protocol specifications.
Suppose thataLOTOS program$L$consists of thetuple
$L=<P_{1},P_{2},..,P_{n}>ofn$ processes $P_{1},$$P_{2},\ldots,P_{n}$, and that
the firstprocess $P_{1}$ isthemainprocess. We define the
syntaxofeachprocessdefinition using the production rules
(1)$\sim(12)$ in Table 1. In Table 1,
“Process-def‘
is thestarting symbol.
“Proc-Id“
and ”Event Id“mustbe definedas
identifiers usingsome
terminal symbols. Thekeywords “process,$”:=”$and “endproc” and theoperators $>>^{\prime\prime\prime\prime}11’’$, $|111^{t\prime},$ $\prime\prime[]’$‘, “;“ and“exit“are
treatedas
terminal symbols.“Event-subset“
isasetof”Event-Id”.
A“Proc-Id”
denotesa process, which is written as an “Identifier”. An
“Event-Id“
maydenoteeither:$- a,servic_{1}e_{\_{ode_{whereIdentifier’’denotestheservice}}^{rim,itiveinteraction:Itiswrittenas}}$
primitive itself and ffNode“ denotes the node
name
atwhich the interactiontakes place. For example, $a^{2}$“
denotes the service primitive $|a’’$atthenode 2(here,we
assume
that each interaction takes place at onlyone
node).
-
an
interaction of sendingmessage:
Itis writtenas
si$(m)”$which
means
the sending of themessage $|m’’$tothe node$i_{;}’’$
-
an
interaction of receiving message : It is written as$ri(m)”$which
means
thereceivingofthemessage $|m^{\prime 1}$ fromthe node $|i’’$.
Interactionsofsending/receivingmessages
are
onlyusedin protocol specifications.2.3 Example of Service Specif\ddagger cations
Letusconsider
an
example in Fig. 1. In Fig. 1, thereare
3 nodes. Suppose that the
user
wants to copysome
elementsinafileof the node 1 into another file ofthenode
3, but the
reverse
order. At the node1,wecan
onlyexecuteread “whichis
a
service primitive interaction readinga
elementfrom the file. Atthe node3,
we can
onlyexecute$write^{3}$“which isa serviceprimitive interaction writing
a
receivingelementinto the file. Thenode2has
a
stack. Atthe node 2,
we can
execute either $tpush^{2}$“or
$pop^{2}$“.$Push^{2}$“
inserts the last receiving element in the local stack.
$Pop^{2}$ “ extracts the past pushed elementfrom the local
stack. Forsimplicity oftheexplanation,wedo notconsider
thecontentsoftheelements. Aservice specificationofthis
exampleis writtenasfollowsusingthe production rulesin
Table1
:
$L=<A>$
process$A:=$($read^{1}$ ;$push^{2}$;$A>>pop^{2}$;$write^{3}$;exit)
$[]$read ;$wri\ddagger e^{3}$; exitendproc
3. Derivation of Protocol Specifications
In this section, we will explain a method for the
derivation of protocol specifications. The derivation algorithm of thispaperistheextended version of those in Ref. $(15,18)$
.
Formore
complex service specifications containingthedisablingoperatoranddata parameters,see thederivation algorithms in Ref.$(19,20)$.
3.1
Example of Protocol SpecificationsFirst,wewillgive
an
exampleof protocolspecifications.Fortheservice specification$L$inSection2.3,wederivethe
following protocol specifications $L_{1},$$L_{2}$ and
L3.
Here,some
int.egers
suchas
8, 14 and 17are
usedas
thesynchronuzationmessages.
Node1:
$L_{1}=<A>$
process$A;=read^{1};s2(14);r2(17)$; A
$[]$$read^{1_{;s_{3}}}(35);s_{2(8);}$exit endproc
Node2:
$L_{2}=<A>$
process$A:=(r1(14);push^{2};$ ($s](17)$;exit Ill$s3(17)$;exit)
$>>A>>r3(11);pop^{2};s3(25)$;exit) $[]$$r1(8)$; exit endproc
Node3:
$L_{3}=<A>$
process$A:=$($r_{2(]7);A}>>s2(11);r2(25);write^{3}$;exit)
$[]$$r1(35);write^{3}$; exit endproc
Fig.2represents
an
executionprocessoftheseprotocol specifications. The dotted lines in Fig. 2 denote theexchange of synchronization
messages.
Fig. 2: An Execution Process of Protocol Specifications
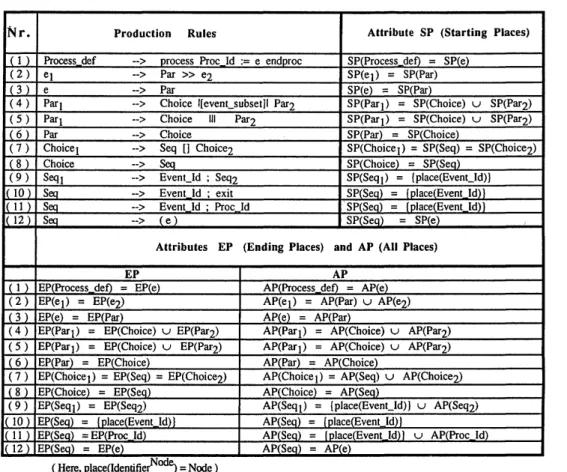
Table 1: Syntax of Specification Language and Attribute Evaluation Rules
3.2 Principles for Deriving Protocol Specifications
Inthissection,
we
willexplaintheprinciples for derivingprotocolspecifications.Thebasicideaofthederivationisto
use
thenotionof”projection“:
That is,first,the events ofanode $p”$
are
selectedfromagiven service specification,andthenthesending/receivinginteractions of synchronization
messagesbetween the node $p”$and other nodes
are
added.3.2.1 Attributes
The information concerning the exchange of synchronization messages is implicitly defined in each
service specification. This information is found by
assigning
some
attributestothenonterminal symbols ofthe$s$yntaxtreeof the service specification. See Ref. (26) for
details of attribute grammars. Inthis paper,
we use
thefollowing three attributes (here, exp(x) represents the
behavior expression which is derived from the nonterminal
symbol $x”$).
SP(x):Thesetofnodes where thefirsteventsofexp(x)are
executed. It is called Starting Places ofthe
nonterminal symbol $x^{\mathfrak{l}\prime}$
.
EP(x):Thesetofnodeswhere the lasteventsofexp(x)are
executed. Itis called Ending Places of $x”$
.
AP(x):The setof all nodeswhere theeventsofexp(x)are
executed. Itis called All Places of $x^{1\prime}$
.
Theseattributesarecalculated
as
thesynthesizedattributes usingtheattribute evaluationrulesin Table 1. The syntax tree for the process A described in Section 2.3 and theattributes for
some
nonterminal symbols ofthe tree aredescribed in Fig. 3. Although theparameter $x^{\prime 1}$ of the
attributesSP(x),EP(x)andAP(x)is anonterminal symbol,
we
mayuse
exp(x)instead of$|\prime x’’$.
Thatis,we
mayuse
$SP(\exp(x))$instead ofSP(x)if thereisnoconfusion.
WegivetheattributesSP(x), EP(x)andAP(x)notonly
for the nonterminal symbols but also for the leaves
correspondingto eventidentifiers andprocessidentifiers. If
“Event-Id“
is $Identifier^{Node’’}$, then we defineSP(Event Id)$=EP(Event_{-}Id)=AP(Event_{-}Id)=${Node}. The attributes corresponding to
process
identifiers aretreated
as
variables. Weequatethevariables of suchaleafnode,forinstance$A$,withthe valuesobtained by synthesis
for therootnode $Process_{-}def^{1}$correspondingtothe
same
processidentifierA. If the equation“SP(A) $=SP(A)uX”$
holds, then”SP(A)$=X^{t\prime}$is obtained
as
the solution. Forthe process A in Fig. 3, the attributeSP(A), EP(A) and
AP(A)
are
treatedas
variables. We find the equations“SP(A) $=\{1\}’’$, “EP(A) $=EP(A)u\{3\}’’$ and “AP(A) $=$
AP(A) $\cup\{1,2,3\}’’$
.
Therefore,thesolutionsare
“SP(A)$=$$\{1\}’’$, “EP(A) $=\{3\}’’$ and “AP(A) $=\{1,2,3\}’’$
.
Theseattributes
are
used to deternine which nodes need tosynchronize theirevents.
3.2.2 Basic idea of Derivation
(1)The sequential execution“;”and $>>^{1\prime}$
For a behavior expression of the form $a^{i}$ ; $B”$
, we
assume
thatthe node $i”$mustsendsome
synchronizationmessages to the Starting Places of $B”$ after $a^{i}$“ is
executed, and that the nodes belonging to the Starting
Places of $B”$mustreceivethesesynchronizationmessages
beforeanyeventof $B”$isexecuted. Forexample, for the
behavior expression $a^{1}$ ; $b^{2}$ ; $c^{1}$ ; exit“,we derive the
following protocol specifications $(here, ’|m]’’$and $m2”$
representthe synchronizationmessages).
Node1:$a^{1}$;$s2(ml)$; $12(m2);c^{1}$; exit Node2: $rl(ml);b^{2};sl(m2)$;exit
process$A:=$($readl$ ; push2;$A>>pop2;write3;exit$) $[]$readl ; write3;exitendproc
Fig. 3: Syntax Tree of Process A and Attribute Evaluation
Forabehavior expression of the form $B1>>B2’’$ ,we assume that the nodesbelongingto theEnding Places of $|\prime B_{1}$
“
must send some synchronization messages to the Starting Places of $B_{2^{t\prime}}$ after the lastevent of $B_{1’’}$ is
executed, and that the nodes belonging to the Starting
Places of $B2^{tt}$ must receive these synchronization
messagesbeforeanyeventof $B_{2^{\dagger\prime}}$is executed.
(2)Non-deterministicchoiceof altematives$\uparrow|[]’’$
Supposethat thebehaviorexpression $a^{1}$ ;$b^{2}$;$c^{3}$;exit
$[]d^{1}$ ;$e^{3}$;exit“
is given. If thesynchronizationmessages
described in the above (1)
are
added to this behavior expression,then thefollowing protocol specificationsare
obtained.
Node1:$a^{1}$;$s2(ml)$; exit
$[]$$d^{1};s3(m3)$;exit
Node2: $\text{ロ_{}exit}^{r1(m1);b^{2};s3(m2);}$exit
Node3: $r2(m2);c^{3}$;exit
$[]$ $r1(m3);e^{3}$;exit
Thereisnoeventsintherightside of $[]”$ofthebehavior
expression forthenode2. Therefore,
an
emptyalternative of the form $B$ $[]$ exit“ is obtainedas
the protocolspecificationof the node 2. If the right side of $[]”$ is
chosen at the node1 by executing theevent $d^{1\prime}’$,the node 2
cannot knowit. Then,
a
wrong temporalordering oftheexecutionofeventsmay
occur.
This problemoccurs
whentheAll Places for the behavior expressions of the both sides of“
$[]$“
are
different. Therefore,weassume
thatthe nodeexecuting the first event ofany alternative must send synchronization messages to all nodes of the choice expressions which donotparticipate in the alternative. For
the above behaviorexpression $a^{1}$;$b^{2}$;$c^{3}$;exit
$[]$$d^{1}$;$e^{3}$;
exit“,wederive the following protocol specifications.
Node 1:$a^{1}$;$s2(m_{1);}$ exit
$[]$$d^{1}$; $s3(m3);s2(m4)$;exit Node2: $rl(ml);b^{2};s3(m2)$;exit $[]$ $rl(m4);exit$ Node3: $r2(m2);c^{3}$;exit $[]$ $r1(m_{3);e^{3};exit}$
Here, $m4”$is the synchronizationmessagestoinformthat
theright side$of”[]”$ischosen.
(3)Process invocation
LetusconsidertheprocessAdescribed in Section2.3.
SincetheprocessAmaybe invoked recursively, it defines
$write^{3})^{n}$for
some
$n\geq 0$.
If theprocessAisinvoked and the left side of choice operator $t’[]”$ is chosen, then a newinstance of$A$,say$A’$,is activated. Again,if the$left\cdot side$of
“$[]$“ is chosen, then another instance of $A$, say $A”$
, is activated. Supposenowthat the rightsideof“
$[]$”ischosen
for thisnewinstance$A^{t}’$,then theprocess$A^{tt}$willterminate
with theexecution ofthesequence read; $write^{3}$; exit“.
After$A^{t}$’ terminates, thesequence $pop^{2};write^{3\prime\prime}$ will be
executed and$A’$willalso terminate. Then,the processA
willbereactivated,andthesequence $pop^{2};write^{3}$“willbe
again executed(seeFig.2).
Itisnatural toassumethat all nodesina processshould
synchronize whenever theprocessis activated. Therefore,
forabehavior expression of the form $a^{i};P’’$, we
assume
thatafter $a^{i}$“ isexecuted, the node $i^{t\prime}$
must send
some
synchronizationmessagestotheAllPlacesof $\uparrow P^{\prime 1}$
.
In the
protocolspecificationsdescribed inSection3.1, the node2
sends synchronizationmessages to thenodes 1 and3after
$notbeIo^{1\prime}ngtheAllPlacesofP,thentheprocessi’d’en^{1}tifer\prime\prime push^{2}isexecuted(seeFig_{f\prime}.2_{t\prime}).Here,ifanodep’do_{1}es$
$P”$ is replaced by “exit” in the derived protocol
specification for the node $p”(^{1}exit^{\dagger\prime}$ is an event
representingthesuccessfulterminationofa process,and it has
no
observationaleffects).3.2.3 Restrictions for Derivation
In this paper, we treat only the service specifications
satisfyingthefollowing restrictions.
[Restrictions]
(R1) Foreachbehavior expression oftheform $B1$ $[]$$B_{2^{\prime\dagger}}$,
all starting interactions of $\dagger\prime B]^{t\prime}$ and all starting
interactions of $B_{2’’}$mustbe associated with the
same
node $q”$
.
That is,$SP(B])=SP(B1)=\{q\}$ must hold.(R2) Foreachbehavior expressionof the form $B_{1}$ $[]$$B2”$,
thesetof Ending Places of $B_{1}$“and$|\prime B_{2’’}$mustbethe
same.
(R3) For each behavior expression of the form $B_{1}$III$B2”$
or $B$] $1[g],..,g_{n}]1B_{2’’},$$B_{1}$ and$B2$must not invoke
the
same
process. Thatis,ifaprocess$P$is invoked in$B_{1}$,then theprocess$P$mustnotbeinvokedin$B_{2}$
.
Restriction Rl simplifies the decision of which
altemative should be selected. Restriction R2andR3
are
introduced in order to simplify the derivation algorithm described in Section3.3. Forexample, ifR3does nothold,
thenthe
same
processes$P$maybe invoked in parallelandthesame events$a^{i}$in$P$may be executedsimultaneously.
Forsuchacase, thesynchronizationmessagessentafterthe
events $a^{i}$
are
executed must be different. This lets the derivationalgorithm
more
complex.3.3 A Derivation Algorithm
Inthissection,
we
propose aderivation algorithm. Thealgorithmisexecuted
as
follows:Step 1: Constmctthe syntax treeTree$(p_{k})$of eachprocess
definition $p_{k};=B’’$inagiven service specification
$L=<P],P_{2},\ldots,P_{n}>$ using the production rules in
Table 1.
Step2:Calculate theattributesSP,EP and APateach node of thetreesTree$(P_{1}),$$Tree(p_{2})$and Tree$(p_{n})$using
theattribute evaluation rules in Table 1.
Step3:Foreach node $p^{1\prime}$in thedistributed system,using
$whicharedefnedinTab1es2and3,ca1cu1a\iota e^{T_{t}}\iota heattributee_{1}va1uationru1efortheattribute_{f_{e}}’’$
attribute $T_{P}$ ateach node ofthetrees Tree$(P_{1})$,
Tree$(p_{2})$and Tree$(p_{n})$.
Let Pspec$(P_{k},p)$denote the valueoftheattribute$T_{p}$atthe
rootnodeofTree$(p_{k})$
.
Then,the protocolspecification $L_{P’’}$for
a
node $p’$isdefinedas
follows:$L_{P}=<Pspec(P_{1},p),Pspec(P_{2},p),..,Pspec(P_{n},p)>$
Since the attributes SP, EP, AP and $T_{p}$
are
all thesynthesized attributes, the values of the attributes are
calculated from the leaf nodes to the root node. The
attribute$T_{P}$in Step3 isdefinedbasedonthe ideadescribed
Nod伽1–
in Section 3.2.2. Forexample, theattributeevaluationrule
(9) in Table 2 represents a derivation algorithm for
expressions of the form $|a^{i}$ ; $B”$
.
The function$Synch_{-}Left_{p}$ represents that ifthe node $p”$ belongs to
$EP(a^{]})$,thatis,if $p=i”$holds, then thenode $p”$must send
some
synchronizationmessagestotheallnodesbelongingto SP(B) (see Table 3). The function $Synch_{-}Right_{P}$
represents that ifthe node $\dagger P’$ belongs to SP(B), thenlt
mustreceive the synchronization message from thenode $i”$
(seeTable3).
In general, thedifferent synchronizationmessagesmust
be usedforthedifferentsynchronizations. Forexample,in
theprotocol specificationsinSection3.1,different integers
such as 8, 14, and 17
are
used as the synchronizationmessages. Wemaysaythatthesynchronization isdefined
between the nonterminal symbolsinthe syntax tree for each
process definition of a given service specification.
Therefore, we give the node number (integer) $N(e)^{\prime I}$ to
eachnode $e”$ofthe syntaxtree,and
use
the nodenumbersas thesynchronizationmessages (seeTable3): By using
theabove derivation algorithm,the protocol specificationsin Section 3.1 arederived from the service specification in Section 2.3. The node numbersin Fig. 3 areusedas the
synchronizationmessagesfor this example.
We have developed the program which derives the
protocol specifications from a given service
specification(20). By using this program, the protocol specificationsarederived automatically.
4. Simulator for Execution of Protocol Specif\ddagger cations
Inordertoobserve theexecution processesofLOTOS
programs, some LOTOS simulators have been
developed$(4,22- 24)$
.
These simulatorscan
simulate the execution of service specificationswritten in LOTOS. Our LOTOS simulator, PROSPEX, can also simulate theexecution of protocol specifications. If$N$ protocol
specifications
are
given, then $N$ PROSPEXare
used tosimulate them in parallel. We use each PROSPEX interactively. PROSPEX readsabehavior expression $B”$
written in LOTOSandshowswhich events areexecutable for $B^{\prime 1}$
.
Theuser
choosesone
executableevent $e”$ fromthecandidates whichPROSPEX shows.Then,PROSPEX
executes the event $e^{\prime 1}$ and calculates which events
are
executableafter $|e’’$isexecuted. Thesimulation isdoneby
repeating these operations. In PROSPEX, the
sending/receivinginteractions
can
be executedautomaticallywithoutinteractionsfromtheuser.
NodQl$\prod$
(a) (b)
PROSPEX is executed
on
UNIX workstations,anditshows theseexecutionprocessesgraphicallyonX-window.
For example,supposethatthe protocol specification$L_{1}$in
Section 3.1 is given. PROSPEX draws the syntaxtree of thebehavior expression of the process $|A’’$(seeFig.$4(a)$)
onX-window.Eachleafcorresponds toeitheranevent,an
sending/receiving interaction
or a
process. The dottedrectanglescorresponds toexecutableevents. In Fig.4(a),
two events read “of the bothsides of the choiceoperator
“$[]$“
are
executable.lftheusercricks read “ofthe left side
of $[]”$,then the eventisexecuted and the syntax treein Fig.
4(a)isreplaced by thatin Fig.4(b). Thisshows that the
event $read^{11}$is executed and
a
newbehavior expression,say$B’$,is obtained. For$B’$,thesending interaction$s2(14)$
andreceiving interaction$r_{2(17)}$ayeexecutedautomatically
without interactions from the user. Then, the behavior expression$B’$ is replaced bythe processA. Since some
events in the process A
are
executable, the nodecorresponding to Aisreplaced by the syntaxtree ofthe
behavior expression of A automatically. The replaced
syntaxtreeisthe
same as
thatin Fig.4(a).Even if thesizeof
a
syntax tree becomes large, PROSPEX calculates asuitable size for drawingthe treeonthegiven windowand
drawsit.
5. Conclusion
In this paper, a derivation algorithm of protocol specificationsfrom
a
service specification is introduced.Ingeneral,theprotocol specifications derived fromaservice specification
are
notsimpleeven
ifa very
simpleservicespecification such
as
theexampledescribed in Section2.3is given. Therefore,our
approach to derive protocolspecifications from
a
service specification is a goodapproach to design distributed systems. For service
specifications written in Full LOTOS, the derivation
algorithmin Ref. (20)is useful. Theformal proofofthe
correctnessof the derivation algorithm isafuture work.
References
(1) ISO: “Information Processing System-Open Systems Interconnection -LOTOS- A Formal Description Technique based
on
the Temporal Ordering of Observational$Behaviour^{\prime 1}$,IS8807,1989.(2) P. H. J.
van
Eijk, C.A. Vissers and M. Diaz : “The Formal Description TechniqueLOTOS”,NonhHolland,1989.
(3) T. BolognesiandE. Brinskma: “Inrroductionto theISO Specification LanguageLOTOS”, ComputerNetworks
and ISDN Systems, Vol.14,No. 1,pp25-59, 1987.
(4) K.Takahashi,H. Kaminaga and N. Shiratori: ‘LOTOS
Features with Survey of Their Support Processing
Systems”, J. IPS of Japan, Vol.31, No. 1, pp.35-46,
1990(in Japanese).
(5) ISO: ”Information Processing System-Open Systems Interconnection - Basic Reference Model”, IS 7498,
1984.
(6) K. Ohmaki and K.$Futatugi;\prime\prime Early$Experience witha
Formal Description Technique : LOTOS“, J. IPS of
Japan, Vol. 31, No. 10, pp.1400-1413, 1990 (in
Japanese).
(7) C. Vissers and L. Logrippo
:
“The Importance of the Concept of Service in the Design of DataCommunicationsProtocols”, Proceedings ofthe Fifth
IFIPWorkshop
on
Protocol Specification, Verificationand Testing,NorthHolland,pp.3-17, 1985.
(8) R.Probert and K. Saleh: “Synthesis of Communication Protocols
:
Survey and Assessment“, IEEE Trans. Comput., Vol. 40,No. 4,pp.468-476, 1991.(9) P. Zafiropulo, C.H. West,H. Rudin,D.D.Cowan and
D. Brand
:
$|Towards$ Analyzing and SynthesizingProtocols“, IEEE Trans. Commun., $Vol.\cdot$COM-28,
No.4, pp.651-661, 1980.
(10) C.V. Ramamoorthy, S. T. Dong andY. Usuda : ‘An
Implementation ofanAutomated Protocol Synthesizer
(APS)and its Applicationtothe X.21 Protocol“, IEEE Trans. Software Eng., Vol. SE-II, No.9, pp. 886-908,
1985.
(11) C.V.,Ramamoorthy,Y.Yaw,R.Aggarwaland J.Song
: “Synthesis of Two-Party Error-Recoverable
Protocols , Proceedings of the ACM SIGCOMM 86
Symposium, pp.227-235, 1986.
(12) P.Merlinand G.
von
Bochmann:“OntheConstructionof Submodule Specifications and Communication
Protocols”, ACM Trans. Program. Lang. & Syst.,
No.1, pp.1-25, 1983.
(13) M. Gouda and $Y_{;}$ Yu
:
“Synthesis of CommunicatingFiniteStateMachines withGuaranteed Progress”, IEEE Trans. Commun., Vol. COM-32, No. 7, pp.779-788,
1984.
(14) P. M. Chu and M.T. Liu: ”Protocol Synthesis inaState TransitionModel“, Proceedings IEEE COMPSAC’88,
pp.505-512, 1988.
(15) G.vonBochmannand R. Gotzhein: “DerivingProtocol
SpecificationsfromService Specifications”, Proceedings of the ACM SIGCOMM 86 Symposium, Vermont,
USA,pp.148-156, 1986.
(16) T.Higashino, T.Kimoto, K.Taniguchiand M. Mori:
“Synthesis of Protocol Machines from Service Specification, Technical Report of IPS of Japan,
88-SF-26-5, 1988(inJapanese).
(17) R.GotzheinandG.vonBochmann:“DerivingProtocol
Specifications from Service Specifications Including
Parameters“, ACM Trans. Comput. Syst., Vol. 8, No.
4,pp.253-283, 1990.
(18) F. Khendek, G. von Bochmann and C. Kant : “New
resultsonderiving protocol specifications from services specifications, Proceedings of the ACM
SIGCOMM’89,pp.136-145, 1989.
(19) C. Kant, T. Higashino and $G_{;}$ von Bochmann :
“Deriving Protocol Specifications from Service Specifications Written in BasicLOTOS”,(submittedfor
publications).
(20) T. Higashino, R. Katou, K. Yasumoto and K.
Taniguchi: “Deriving Protocol Specifications from
Service Specification Written in LOTOS with Data
Parameters,Technical Report of IEICE$of$Japan,
IN91-111,1991 (inJapanese).
(21) R. Langerak
:
“Decomposition of Functionality; aCorrectness-Preserving LOTOS Transformation“,
Proceedings ofthe Tenth International IFIP WG 6. 1 Symposium
on
Protocol Specification, $Te$sting andVerification,NorthHolland,pp.229-242, 1990.
(22) J. Tretmans
:
“Hippo:
A LOTOS Simulator“, The Fornal Description TechniqueLOTOS,North-Holland,pp.391-396, 1989.
(23) R. Guillemot, M. Haj-Hussein and L. Logrippo :
“Executing Large LOTOS Specifications”, Proceedings oftheEighthInternational IFIPWG 6.1 Symposiumon
Protocol Specification, Testing andVerification,North
Holland, pp.399-410, 1988.
(24) K. Yasumoto, T. Higashino and K. Taniguchi :
“Execution of Protocol Specifications Written in
$LOTOS^{\prime\dagger}$,Technical Report of IEICE of Japan,
IN91-112,1991 (inJapanese).
(25) H. Ehrig and B. Mahr : “Fundamentals of Algebraic
Specification 1”, EATCS Monographs onTheorelical
ComputerScience,Vol. 6,Springer-Verlag, 1985. (26) A. Aho, R. Sethi and J. D. Ul[man : ttCompilers
Principles, Techniques and Tools”, Addison-Wesley,