GPSとGLONASSにおける高精度測位の 利用衛星選択効果に関する研究
池田 隆博
1・佐田 達典
21学生会員 日本大学大学院 理工学研究科社会交通工学専攻(〒274-8501 千葉県船橋市習志野台7-24-1)
E-mail:[email protected]
2正会員 日本大学教授 理工学部社会交通工学科(〒274-8501 千葉県船橋市習志野台7-24-1)
E-mail:[email protected]
衛星測位分野では現在GPSの利用が主流であるが,近年GLONASSなどの利用可能な衛星が増加してお り,複数衛星系による併用測位が今後一般的になるものと想定される.また,衛星数が増加することで,
マルチパス等の誤差を含む衛星電波を排除しても,測位に必要な衛星数を確保できるようになったため,
事前に衛星電波の状態を把握し測位に使用する衛星を選択することが求められる.本研究では,マルチパ スの影響を受ける衛星電波を判別するため,衛星の搬送波の距離変化を使用して判別を行い,それをもと に測位に利用する衛星を選択し測位性能の検証を行った.その結果,搬送波の距離変化を用いることで,
マルチパスの影響を受ける衛星電波の判別が可能であること,利用衛星を選択することで,Fix解の取得 率が増加し,解の欠損を生じることなく測位できることが確認された.
Key Words : GPS, GLONASS, Interferometric Positioning, Multipath, Carrier, Solution
1. はじめに
我が国の衛星測位分野では,米国が運用するGPS
(Global Positioning System)の利用が主流であり,公共測 量等による高精度測位のほか,携帯電話等による位置情 報サービスに使用されている.今後は,その運用性を高 めるため,GPSを含む複数衛星系を併用した測位に加え て,マルチパス等の誤差要因への対処が重要となる.
GPSを含む複数衛星系を併用した測位としては,国産 の測位衛星である準天頂衛星システム(QZSS:Quasi- Zenith Satellite System),ロシアが運用するGLONASS
(Global Navigation Satellite System)等の利用が考えられる.
中でもGLONASSについては,2011年に全世界をカバー する24衛星での運用が開始されており,さらに,-公共 測量-作業規程準則において,GLONASSの利用方法が 明記されるなど,今後GPSとGLONASSを併用した測位 が一般的になるものと想定される1).
GPSとGLONASSを併用し,観測可能な衛星が増加し た場合,衛星電波の遮蔽されやすい環境でも測位に必要 な衛星数が得られ,高精度測位ができる可能性がある.
また,衛星数が増加することで,マルチパス等の誤差を 含む衛星電波を排除しても測位に必要な衛星数を確保で きる可能性があり,公共測量等の高精度を必要とする作
業では,観測可能な衛星電波の状態を事前に把握し,測 位計算に使用する衛星を選択する手法が求められる.
そこで本研究では,マルチパスの影響を受ける衛星電 波の判別手法を提案し,高精度測位における利用衛星の 選択効果について検証する.マルチパスの削減および判 別手法としては,これまでにいくつかの報告が行われて おり,受信機内部の相関関係を用いた手法としては,ナ ローコリレータ等の受信機の帯域特性を利用した技術が 示されている2).また,相関関係以外の手法としては,
搬送波の位相と搬送波に乗せて送信されるコードの位相 との差を用いた手法,衛星電波の差分処理結果を利用し マルチパスを判別する指標を導く方法等が提案されてい る3).しかし,これらの報告は,GPSを対象とした手法 が多く,GLONASSについても同様にマルチパスを判別 する手法が求められる.
本稿では,提案したGPSとGLONASSのマルチパス判 別手法について記述し,次に,その手法を用いて,GPS とGLONASSの衛星電波観測データより,マルチパスの 影響を受ける衛星電波の判別が可能か調べた.また,高 精度測位における利用衛星選択効果を明らかにするため,
提案手法により得られた結果から使用する衛星を選択し,
「GPSのみ」と「GPS+GLONASS」の場合で検討したの で,その結果を報告する.
2. 干渉測位の概要
測位衛星を用いた公共測量では,干渉測位方式が用い られる.干渉測位とは,既知点と未知点に受信機を設置 し,双方で同時観測された衛星からの受信機までの距離 に対して差分処理を行うことで,点間の基線ベクトルを 求める方式である.
差分処理には,図-1に示すように衛星2機,受信機2 機の組合せを基本に行い,衛星に対する各受信機との行 路差により,衛星・受信機時計の誤差が消去される.ま た,未知点座標の算出には,異なる組合せを3個以上つ くる必要があり,これには準拠する時系が同一である 4 機以上の衛星から電波を受信する必要がある.そのため,
GPS測位時にGLONASSを併用する場合,準拠する時系
が異なるため,少なくともGLONASS衛星を2機観測す る必要がある.
なお,衛星から受信機までの距離については,搬送波 の波数に波長を乗じることで求められる.しかし,図-2 に示すように,搬送波の最初の受信時に得られる波数小 数部(位相)と,続けて得られる波数変化分(位相積算 値)は測定できるが,最初の波数の整数部については不 明である.この整数部の値を整数値バイアスと呼び,こ れを確定することで,5mm~20mmの精度であるFix解が 得られ,確定しない場合,10cm~数mの精度であるFloat 解となる4).
3. マルチパスによる誤差電波の判別手法
(1) 従来の誤差電波判別手法
マルチパス等の誤差電波の判別手法は従来から報告さ れている.例えば,衛星電波の位相差を参考とした手法 として,増成ら(2008)は,GPS変位計測における基線 解析の基礎式から,上空障害物の影響を表す指標を算出 している3).これは,基線解析により確定した波数整数 部と計測点座標を使用し,計算で求められた差分処理結 果と,受信機によって測定された差分処理結果との残差 を上空障害物の影響を表す指標としている.この指標よ り,残差の大きい衛星を特定し,それらの衛星を用いず 解析を行うことで,計測精度の改善に効果があることが 報告されている.しかし,残差の計算に当たっては,障 害物の影響を受けない基準衛星が必要であり,衛星配置 によっては,適用できない観測時間帯が想定される.
また,衛星1機の電波でマルチパスの影響を判別する 手法として,久保ら(2003)は,従来の搬送波位相とコ ード位相の差を利用して算出したマルチパス変動量と,
アンテナと障害物の幾何学的配置から理論的に算出した 指標の双方を利用して推定を行っている5).信号強度に よる値の変動と比較し,双方の手法で算出したマルチパ
図-1 干渉測位における差分処理4)
図-2 干渉測位用受信機における波数測定4)
スの変動と相関が見られることを確認しており,さらに,
その指標を用いてマルチパスとなる衛星電波を推定する ことで,DGPS(Differential GPS)測位における測位誤差 が減少することを報告しているが,干渉測位の精度評価 までは行われていない.
本研究では,これらの衛星電波の位相を用いた手法を 参考とし,GPSとGLONASSのマルチパスの影響を受け る衛星電波の判別手法を提案する.
(2) 提案する誤差電波の判別手法
マルチパスの影響を受ける衛星電波の判別手法として,
本研究では,搬送波の位相遅延量の特性を用いて,判別 に有効な指標の算出を行う.
搬送波の位相遅延量は,衛星電波の伝搬経路における 総電子数(TEC:total electron content)と電波の周波数帯 に依存し,(1)式のように表される6).
=
:位相遅延量(m) :光速(m/s)
:位相遅延量(s) :総電子数
:搬送波周波数(Hz)
受信機A(既知点) 受信機B(未知点)
衛星1(位置は既知) 衛星2(位置は既知)
行路差:衛星時計誤差を消去 行路差
行路差の差:
受信機時計誤差を消去
:衛星-受信機間距離
受信機
t = 0 t = t1
波数整数部
(観測不可)
波数整数部
(観測不可)
最初の波数小数部
(観測可)
波数小数部 = 位相
(観測可) 波数変化分 = 位相積算値
(観測可)
衛星
ここで,伝搬経路内の総電子数は,衛星が天頂付近の 場合において最も少なく,低仰角衛星ほど多くなる.ま た,GPS衛星とGLONASS衛星ではL1とL2の周波数帯の 異なる搬送波を送信しており,低仰角衛星ほど,L1と L2の位相遅延量の差は大きくなるため,位相変化に差 が生じるといえる(図-3).
位相変化については,位相の差に対して正確な波長を 乗じることで衛星と受信機間の距離変化が得られる.波 長は,正確な光速(C = 299792458 m/s)を搬送波周波数 で割ることで得られるため,(2)式のように書ける7).
=
:距離変化(m) :位相積算値(cycle)
:時刻(s)
このとき,周波数帯の異なる搬送波(1周波,2周波)
に対して,それぞれ位相変化に差が生じる場合,(2)式 で得られる距離変化の差は大きくなるものと推察される.
GPSでは,全衛星同一のL1,L2周波数帯( = 1575.42×
106 Hz, =1227.60×106 Hz)の電波を送信するCDMA
(Code Division Multiple Access)方式であるため,異なる 周波数帯の距離変化の差は(3)式のように求められる7).
=
:距離変化の差(m) :1周波 :2周波
一方,GLONASSでは,衛星毎に異なるL1,L2周波数 帯の電波を送信するFDMA(Frequency Division Multiple Access)方式であるため,衛星毎に定められたチャンネ ル番号より搬送波周波数を算出する必要がある8).よっ て,(4)式,(5)式より衛星毎のL1,L2周波数帯を求め,
得られた周波数帯を(3)式に代入することで,GLONASS における異なる周波数帯の距離変化の差が求められる9).
( )
( )
:チャンネル番号(-7~+6)
電離層による遅延は,設置した受信機間の基線長が
10km以下であればほぼ同一であるため7),位相が正確に
計測されると,(3)式で得られる距離変化の差は,設置 した受信機間で類似した結果が得られるものと考えられ る.しかし,一方の受信機が,図-4に示す遮蔽物からの 反射波,または遮蔽物の回折によるマルチパスの干渉を
図-3 衛星位置における位相遅延量の概要
図-4 反射波と回折波によるマルチパスの概要
図-5 距離変化の差の較差を用いたマルチパス判別
受けた場合,観測された搬送波の位相に誤差が含まれる ため,較差は大きくなるものと考えられる.本研究では,
この較差をマルチパスの影響を表す指標とする(図-5).
較差がマルチパスの判別に有用であるか検証するに当 たり,マルチパスの影響を受けない衛星電波と受ける衛 星電波が必要となる.そこで,遮蔽物を含む複数観測点 と含まない観測点に受信機を設置し,得られた双方のデ ータから距離変化の差を求めて比較し,マルチパスの影 響を受ける衛星電波の判別を行った.
4. 遮蔽環境におけるマルチパス判別実験
(1) 実験目的
マルチパスの影響を受ける衛星電波の判別を行うため,
周囲に遮蔽物を含む観測点と含まない観測点でGPSと
衛星1(L1,L2送信 天頂付近)
衛星2(L1,L2送信 低仰角)
受信機 TEC:総電子数
TEC:総電子数
不可視衛星 可視衛星
受信機 マルチパス
(反射波)
マルチパス
(回折波)
直接波 直接波
受信機A(遮蔽物あり) 受信機B(遮蔽物なし)
衛星1(L1,L2送信) 衛星2(L1,L2送信)
基線距離:10km以下
:距離変化の差
マルチパスなし:
マルチパスあり:
遮蔽物
マルチパス
(反射波)
図-6 観測点の設置位置
図-7 3次元点群データ(日本大学理工学部船橋キャンパス)
GLONASSの衛星電波観測データの収集を同時間帯で実 施した.双方の受信機で得られた観測データより,本研 究で提案するマルチパスの影響を表す指標を算出し,そ の有用性の検討を行った.
(2) 実験場所・日時
実験場所は,図-6に示す日本大学理工学部船橋キャン パス内に設置した,周囲の遮蔽環境が異なる観測点 B2~B7の計6箇所と,遮蔽物を含まない観測点A0の計1箇 所である.実験日時は,2011年11月5日~7日10:00~13:00,
13:30~16:30であり,遮蔽物を含む観測点と含まない観測 点で同時測位を実施した.
また,観測点B2~B7における遮蔽物の位置を調べるた め,2012年2月3日に地上型3Dレーザースキャナを観測点 上に設置し,図-7に示す日本大学理工学部船橋キャンパ ス内の3次元点群データの取得を行った.図-8に各観測 点の遮蔽状況を示す.B2~B3では,1方向が建物で塞が れており,B4~B6では,建物に加え樹木により1方向ま たは2方向が塞がれている.B7では,建物と樹木が他の 観測点よりも離れており,上空視界が比較的開けている
B2:北遮蔽 B3:南遮蔽 B4:東遮蔽
B5:西遮蔽 B6:東西遮蔽 B7:斜め遮蔽
図-8 観測点B2~B7の遮蔽状況
図-9 実験状況(左:A0遮蔽物なし 右:B2北遮蔽)
ことが確認できる.
(3) 実験方法
実験は,図-6に示す観測点上に設置した三脚に衛星測 位用のアンテナを取り付けて行い(図-9),GPSと GLONASSの衛星電波観測データを受信機の内部メモリ に記録した.使用した受信機は,ニコン・トリンブル社 製Trimble NetR8であり,記録した観測データはRINEX3.0 形式に変換した.
実験方法としては,データ出力間隔を1Hzに設定し,
各観測点で3時間測位を実施した.測位手順としては,
遮蔽物を含まないA0では常に測位を実施し,遮蔽物を 含むB2~B7では「B7:斜め遮蔽」→「B6:東西遮蔽」→
「B2:北遮蔽」→「B5:西遮蔽」→「B3:南遮蔽」→
「B4:東遮蔽」の順に行った.
(4) マルチパスの影響を受ける衛星電波の検討
GPSとGLONASSのマルチパスの影響を受ける衛星電 波 を判別す るため, 衛星番 号毎(GPSは 「G」,
GLONASSは「R」と示す)にL1とL2の距離変化の差を 算出し,遮蔽物を含む場合と含まない場合で同時間帯に よる算出結果の比較を行った.傾向の確認については,
1分間毎(データ数:60)に較差の平均値と標準偏差値 を求めて行った.また,得られた較差の傾向に対して,
衛星位置と遮蔽物位置による関係を調べるため,GPSと GLONASSのAlmanacデータ(衛星軌道情報)と図-7に示
B6:東西遮蔽
100m
B7:斜め遮蔽 B5:西遮蔽 B4:東遮蔽
B2:北遮蔽
B3:南遮蔽
A0:遮蔽なし
出典:Google Earth
図-10 観測点B2におけるGPSのマルチパス検討結果
図-11 観測点B2におけるGLONASSのマルチパス検討結果
す観測点周辺の遮蔽環境から,方向角毎の遮蔽物の仰角 を算出し,各衛星の電波を取得した時間帯の衛星位置を 記入した.
観測点B2におけるGPS,GLONASSのマルチパス検討 結果を図-10,図-11に示す.較差の平均値については,
GPSのG32,GLONASSのR02について値が大きくなる傾 向が見られたが,ほとんどの衛星は0mm付近で推移して おり,大きな変化は見られなかった.一方,較差の標準 偏差値については,0mm付近で推移する場合と,1.0mm 以上の大きな値を示す場合の2種類の傾向が確認された.
図-12 観測点B2におけるGPSの信号強度検討結果
図-13 観測点B2におけるGLONASSの信号強度検討結果
標準偏差値が大きくなる際のGPSとGLONASSの衛星位 置を調べると,GPSのG32,GLONASSのR15を除き,衛 星仰角が遮蔽物の仰角よりも低く,本来は不可視である ことが確認できる.不可視衛星からの衛星電波は,遮蔽 物からの回折による受信により,マルチパスの影響を強 く受けているものと推察されるため,標準偏差による傾 向は,その影響によるものと考えられる.
なお,GPSのG32,GLONASSのR15については,可視 衛星であるため,遮蔽物からの反射によるマルチパスの 影響を受けているものと考えられる.衛星と遮蔽物位置 を確認すると,衛星の飛来位置(方位角:140°~220°)
に対して,仰角値の高い遮蔽物が正対する方向(方向 角:320°~40°)に位置しており,その遮蔽物が影響し たものと推察される.
ここで,検討結果と信号強度との関係について確認を 行う.遮蔽物を含む観測点で得られた各衛星の信号強度 値に対して,遮蔽物を含まない観測点で得られた同衛星 の信号強度値を差し引き,1分間毎(データ数:60)に 平均値を求めた結果をGPS,GLONASS別に図-12,図-13 に示す.GPSとGLONASSのL1,L2の信号強度について
-5.0 -4.0 -3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 平均値(mm)
G01 G02 G03 G04 G05 G06 G07 G08 G09 G10 G11 G12 G13 G14 G15 G16 G17 G18 G19 G20 G21 G22 G23 G24 G25 G26 G27 G28 G29 G30 G31 G32
-5.0 -4.0 -3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 標準偏差値(mm)
0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
仰角(°)
方位角・方向角(°)
黒線:遮蔽物位置
-5.0 -4.0 -3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 平均値(mm)
R01 R02 R03 R04 R05 R06 R07 R08 R09 R10 R11 R12
R13 R14 R15 R16 R17 R18 R19 R20 R21 R22 R23 R24
-5.0 -4.0 -3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 標準偏差値(mm)
0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
仰角(°)
方位角・方向角(°)
黒線:遮蔽物位置
-25.0 -20.0 -15.0 -10.0-5.00.05.0 10.0 15.0 20.0 25.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
L1信号強度の較差 平均値(dBHz)
G01 G02 G03 G04 G05 G06 G07 G08 G09 G10 G11 G12 G13 G14 G15 G16 G17 G18 G19 G20 G21 G22 G23 G24 G25 G26 G27 G28 G29 G30 G31 G32
-25.0 -20.0 -15.0 -10.010.015.020.025.0-5.00.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
L2信号強度の較差 平均値(dBHz)
方位角(°)
-25.0 -20.0 -15.0 -10.010.0-5.00.05.0 15.0 20.0 25.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
L1信号強度の較差 平均値(dBHz)
R01 R02 R03 R04 R05 R06 R07 R08 R09 R10 R11 R12
R13 R14 R15 R16 R17 R18 R19 R20 R21 R22 R23 R24
-25.0 -20.0 -15.0 -10.010.015.020.025.0-5.00.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
L2信号強度の較差 平均値(dBHz)
方位角(°)
図-14 観測点B3におけるGPSのマルチパス検討結果
図-15 観測点B3におけるGLONASSのマルチパス検討結果
は,不可視衛星の場合,受信機間の信号強度の差がL1,
L2ともに大きくなる傾向が見られ,図-10,図-11におけ る較差の標準偏差の傾向と相関が見られる.また,反射 波 の 影 響 を 受 け て い る と 推 察 さ れ るGPSのG32,
GLONASSのR15の可視衛星についても,信号強度による 差の平均値の分布が大きくなる傾向が見られ,図-10,
図-11による検討結果との相関が見られた.しかし,衛 星の可視条件が変わる際の信号強度の傾向を調べると,
GPSのG01,GLONASSのR08等の衛星において,不可視 となる直前に受信機間の信号強度の差が大きくなる傾向
図-16 観測点B4におけるGPSのマルチパス検討結果
図-17 観測点B4におけるGLONASSのマルチパス検討結果
が見られ,またその逆も確認された.これは,信号強度 の差は,距離変化による較差と比較し,マルチパスの影 響を正確に示さない場合があることを表しており,提案 手法を用いることで,より詳細なマルチパス判別が可能 であると考えられる.
不可視衛星と較差の標準偏差の値が大きくなる際の方 位角が一致する傾向については,観測点B3~B7でも同様 の傾向が見られている.また,観測点B2で見られた,
遮蔽物からの反射によるマルチパス影響と推察される結 果も観測点B3で見られた.図-14,図-15より観測点B3に
-5.0 -4.0 -3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 平均値(mm)
G01 G02 G03 G04 G05 G06 G07 G08 G09 G10 G11 G12 G13 G14 G15 G16 G17 G18 G19 G20 G21 G22 G23 G24 G25 G26 G27 G28 G29 G30 G31 G32
-5.0 -4.0 -3.0 -2.0-1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 標準偏差値(mm)
0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
仰角(°)
方位角・方向角(°)
黒線:遮蔽物位置
-5.0 -4.0 -3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 平均値(mm)
R01 R02 R03 R04 R05 R06 R07 R08 R09 R10 R11 R12
R13 R14 R15 R16 R17 R18 R19 R20 R21 R22 R23 R24
-5.0 -4.0 -3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 標準偏差値(mm)
0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
仰角(°)
方位角・方向角(°)
黒線:遮蔽物位置
-5.0 -4.0 -3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 平均値(mm)
G01 G02 G03 G04 G05 G06 G07 G08 G09 G10 G11 G12 G13 G14 G15 G16 G17 G18 G19 G20 G21 G22 G23 G24 G25 G26 G27 G28 G29 G30 G31 G32
-5.0-4.0 -3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 標準偏差値(mm)
0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
仰角(°)
方位角・方向角(°)
黒線:遮蔽物位置
-5.0 -4.0 -3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 平均値(mm)
R01 R02 R03 R04 R05 R06 R07 R08 R09 R10 R11 R12
R13 R14 R15 R16 R17 R18 R19 R20 R21 R22 R23 R24
-5.0 -4.0 -3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 標準偏差値(mm)
0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
仰角(°)
方位角・方向角(°)
黒線:遮蔽物位置
図-18 観測点B5におけるGPSのマルチパス検討結果
図-19 観測点B5におけるGLONASSのマルチパス検討結果
おけるGPS,GLONASSのマルチパス検討結果を確認す ると,可視衛星の較差の平均値,および標準偏差の値が 大きくなる衛星の位置(方位角:280°~320°)と正対 する方向(方向角:100°~140°)に遮蔽物が確認でき るため,観測点B2と同様に遮蔽物からの反射による影 響が考えられる.
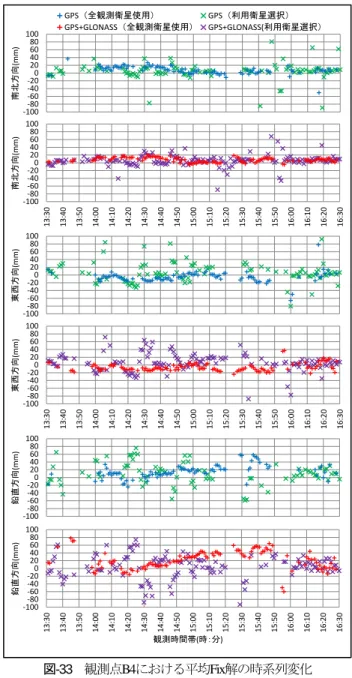
一方,観測点B4~B7の可視衛星については,平均値,
標準偏差ともに0mm付近で推移する傾向が見られ,遮蔽 物からの反射によるマルチパスの影響と推察される結果 は得られなかった.図-16,図-17より観測点B4における
図-20 観測点B6におけるGPSのマルチパス検討結果
図-21 観測点B6におけるGLONASSのマルチパス検討結果
GPS,GLONASSのマルチパス検討結果を確認すると,
可視衛星は較差の平均値,標準偏差ともに全て0mm付近 で推移することがわかる.このとき,図-8より周囲の遮 蔽物の種類を調べると,方向角50°~100°の範囲では,
観測点B2,B3で見られた建物による遮蔽物が確認でき るが,方向角0°~50°,100°~180°の範囲では,樹木 による遮蔽物を多く含むことが確認できる.樹木に対し ては,衛星電波の反射はほとんど起きないため,樹木の 方向角と正対する位置(方位角:180°~360°)を飛来 するGPSとGLONASSの可視衛星の傾向は,その影響に
-5.0 -4.0 -3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 平均値(mm)
G01 G02 G03 G04 G05 G06 G07 G08 G09 G10 G11 G12 G13 G14 G15 G16 G17 G18 G19 G20 G21 G22 G23 G24 G25 G26 G27 G28 G29 G30 G31 G32
-5.0 -4.0-3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 標準偏差値(mm)
0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
仰角(°)
方位角・方向角(°)
黒線:遮蔽物位置
-5.0 -4.0 -3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 平均値(mm)
R01 R02 R03 R04 R05 R06 R07 R08 R09 R10 R11 R12
R13 R14 R15 R16 R17 R18 R19 R20 R21 R22 R23 R24
-5.0 -4.0 -3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 標準偏差値(mm)
0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
仰角(°)
方位角・方向角(°)
黒線:遮蔽物位置
-5.0 -4.0 -3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 平均値(mm)
G01 G02 G03 G04 G05 G06 G07 G08 G09 G10 G11 G12 G13 G14 G15 G16 G17 G18 G19 G20 G21 G22 G23 G24 G25 G26 G27 G28 G29 G30 G31 G32
-5.0 -4.0 -3.0-2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 標準偏差値(mm)
0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
仰角(°)
方位角・方向角(°)
黒線:遮蔽物位置
-5.0 -4.0 -3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 平均値(mm)
R01 R02 R03 R04 R05 R06 R07 R08 R09 R10 R11 R12
R13 R14 R15 R16 R17 R18 R19 R20 R21 R22 R23 R24
-5.0 -4.0 -3.0 -2.0 -1.00.01.02.03.04.05.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
距離変化の差の較差 標準偏差値(mm)
0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360
仰角(°)
方位角・方向角(°)
黒線:遮蔽物位置