招待論文
ミリ波レーダによる高分解能イメージング技術
山田 寛喜
†a)High-Resolution Imaging Techniques for Millimeter-Wave Radar Hiroyoshi YAMADA†a)
あらまし ミリ波レーダは,その伝搬特性,広帯域性から,主に車載レーダとして広く普及してきた.更に MIMOレーダ化による高機能化,低価格化に伴い,近年では,近距離高分解能レーダとして幅広い応用研究が進 められている.このようなアレーレーダ化により,距離,速度(ドップラ周波数)に加え,方位(角度)情報と いったターゲットの3次元情報が得られる.これらを用いることによりターゲットの空間的な位置や様々な特徴 を得ることができる.距離分解能は周波数帯域幅,ドップラ分解能は観測時間の増加に伴い改善可能である.し かしながら,方位分解能に関しては,アレー素子数の増加が必要となるため,ハードウェアの制約等により十分 な分解能確保が困難な場合が多い.この論文では,方位分解能改善の観点に絞り,その高分解能化に関して論じ ている.ここでは二つの異なるアプローチを概説し,その有効性を明らかにする.一つは人物などの動きのある ターゲットの検出を目的としたMIMO仮想アレーによる高分解能化手法である.もう一つは自動車の側方(斜 め前方)監視を目的としたレーダプラットホームの動きによる合成開口手法である.これらの手法の効果を実験 結果を通して示している.
キーワード ミリ波レーダ,MIMOレーダ,仮想アレー,合成開口レーダ,イメージングレーダ
1.
ま え が きレーダは,電波を用いた応用機器として古くから発 達してきた装置である.発明当初はその用語
(Radio Detection and Ranging, Radar)
から分かるように距離 の計測を目的としていたが,周波数変移の検出が容易 であることからドップラレーダのように速度の検出,更にはアレーアンテナや合成開口レーダ技術による多 次元イメージングと様々な応用に向けて発展している.
レーダは電波を用いているため,伝搬の周波数特性,
波長とターゲットサイズの比率や反射透過特性などに 応じて,適した周波数帯が存在する.ミリ波帯は
30
〜300 GHz
に渡る周波数を指す.ミリ波レーダは,車載レーダとしての研究開発が取り組まれ実用化された
(
例えば[1])
ことに加え,デバイスの進展に伴う高機能 化,低価格化が進んだため,様々な分野への応用が期 待されている.ミリ波帯の電波はその伝搬減衰のため†新潟大学工学部工学科知能情報システムプログラム,新潟市 Smart Information Program, School of Enginneering, Faculty of Engineering, Niigata University, Niigata-shi, 950–2181 Japan
a) E-mail: [email protected] DOI:10.14923/transcomj.2020JBI0001
到達範囲が限定され,他の機器(レーダ)への干渉を 抑えられるばかりでなく,広い周波数帯域幅の確保も 容易となる.加えて
24, 60.5, 76.5, 79 GHz
帯の特定小 電力機器となるレーダに関しては技術適合証明により 利用可能となるため,自動車のみならず,交通監視や 人物検出等のライフサポートシステムへの展開を含め た幅広い応用研究が進められている(
例えば[2]
〜[4])
.本論文では,
76.5/79 GHz
帯のミリ波レーダにおけ るイメージング技術に関して論じる.ミリ波レーダ応 用において目的とする推定パラメータは,距離,方位(角度),速度(ドップラ周波数)であり,これらの分 解能改善が応用範囲の拡大には不可欠である.この周 波数帯のレーダでは,最大
1 GHz
(76.5 GHz
帯)ある いは4 GHz
(79 GHz
帯)の周波数帯域幅が利用可能と なる.すなわち,特別な信号処理を用いることなく10
cm
前後の距離分解能が実現可能であり,多くの目的 では十分な分解能といえる.速度,すなわちドップラ 周波数分解能は観測時間(Coherent Processing Interval,
CPI)
等で規定される.すなわち分解能改善のためには 観測時間を増加すればよい.最も改善が困難な推定パ ラメータが方位である.角度分解能向上のためには狭 ビームを形成するための大開口アンテナ(あるいはアレーアンテナ)が必須となる.これはハードウェアの 複雑化及びコストの増加をもたらす.この角度分解能 特性の改善が応用分野を広げる鍵であるといえる.こ の論文では,ミリ波レーダにおける角度分解能の改善 手法に焦点を絞り,二つの観点から,その解決手法を 概説する.なお,高分解能性の実現には
MUSIC [5]
,Capon
法[6]
等に代表される超解像法や最ゆう推定手 法[7], [8]
,スパース信号再構成のようにアンテナ開口 長に依存しない分解能特性を実現する信号処理アルゴ リズム[9]
の利用も考えられる.しかしながら,これ らの手法の多くは理想的な点波源(点ターゲット)に おいて優れた分解能特性を示すが,ミリ波応用でしば しば現れる散乱点が空間的に分布したターゲットに対 しては十分な性能を発揮できない場合もある.本論文 では,そのようなアルゴリズムを用いることなく,基 本的なアルゴリズムであるフーリエ変換手法に基づく スペクトル推定における高分解能性実現を目的とする.また,少ない素子数での実現手法としては,ランダム アレーによるアプローチもある.ただしこの場合,高 速信号処理アルゴリズム(例えば
FFT
)の適用が困難 となる.したがって,ここでは不等間隔アレーを用い て素子数を軽減しハードウェアコスト等を軽減し,か つ以降に示す仮想アレー化手法を用いて最終的には等 間隔リニアアレー(Uniform LinearArray, ULA)
となる アプローチとした.このような場合,前述の様々な高 分解能手法の適用も可能であることは言うまでもない.さて,高分解能実現のため代表的な手法の一つは
MIMO (Multiple-Input Multiple Output)
レーダ[10]
に 代表される仮想アレー化手法である.MIMO
レーダ は,その名のとおり送信,受信を複数素子としてア レー化したレーダであり,少ない実素子数で,より多 くの仮想アレーを実現するレーダ技術である.本論文 では,まず送受信が各1
素子であるSISO (Single-Input Multiple Output)
レーダをはじめとして,受信のみをア レー化したSIMO (Single-Input Multiple Output)
レー ダ,更にMIMO
レーダという流れで,その概念を説 明する.一方,仮想アレー化手法に関しては受信のみ のパッシブアレー(Passive array)
分野で多数の検討が 存在する[11], [12]
.パッシブアレーでは,各波源から の到来波を観測するが,これはアクティブなセンシン グであるSIMO
レーダにおけるターゲットからの反射 波を観測する場合と,ほぼ同形の問題となる.そこで筆者らの研究グループでは,それらの仮想ア レー化手法の一つであるカトリ・ラオ
(Khatri-Rao, KR)
積仮想アレー手法
[11]
とMIMO
の融合に関する理論 的検討を進め,人物などの動きのあるターゲットの 検出を目的とした場合,最小冗長度アレー(Minumun Redundancy Array, MRA) [13]
に代表される不等間隔 アレーを用いることにより,飛躍的に仮想素子数を増 加することが可能となることを示した[14], [15]
.ここ では,その仮想アレー化手法を解説し,ミリ波帯レーダ における屋内人物のトラッキング及び静止している人 物の位置検出実験により,その有効性を明らかにする.もう一つの角度高分解能手法は合成開口レーダ
(Syn- thetic Aperture Radar, SAR)
である.SAR
は人工衛星 や航空機搭載レーダによる地球環境計測等に用いられ ているように,プラットホームの移動により取得され たデータセットをアレーとみなした高分解能イメージ ング手法[17], [18]
である.このレーダでは,後述す るようにターゲットまでの距離によらず,一定の空間(アジマス方向)分解能が実現可能となる特徴がある.
身近な移動するプラットホームとして最も期待される 応用は自動車であろう.
SAR
はその特性上,プラット ホームの走行方向,すなわちの前方監視には不適であ る.筆者らの研究グループでは,光学カメラやLiDAR (Light Detection and Ranging)
での観測が困難となる視 界不良時の周囲監視,精密自己位置推定を目的として,斜め前方方向を向けたレーダによる
SAR
観測(スクイ ントモードSAR
)による側方の2
次元イメージングに 関して検討を進めてきた[19], [20]
.波長が4 mm
程度 である76.5 GHz
帯でのSAR
であるため,精度の観点 では非常に精密な測定が必須であり,走行時の動揺を 伴う自動車において有効に機能するかが懸念される.その点を実際の走行車両により検証することが主目的 である.なお,車載レーダにおける
SAR
応用に関する 検討は複数あり,筆者らのグループの検討と同時期に は,基礎的な実験結果も複数報告されている[21], [22]
. 初期の実験は人工衛星と同様に側方監視のものが多く,スクイントモードでの実フィールド実験
[19]
は比較的 早期の実証結果であるものと思われる.この論文の構成は以下のとおりである.
2.
では,本論文で用いるレーダ方式である
FMCW (Frequency Modulated Continuous Wave)
レーダに関して概説する.3.
では,従来のMIMO
レーダによる開口長増加の原 理と拡張のための基礎である不等間隔パッシブアレー における仮想アレー化手法について概説し,それらを 融合したMIMO
仮想アレーレーダ手法を説明する.その後,屋内における人物トラッキング実験,着席し
ている人物位置検出実験結果を通して,その有効性を 検証する.
4.
はミリ波合成開口レーダに関する章であ る.まず,SAR
アルゴリズムの一つであるバックプ ロジェクションに関して概説し,側方(斜め前方)監 視用車載レーダとしての実現可能性を検証する.その 後,走行車両実験結果を通して,SAR
処理の効果を明 らかにする.5.
はまとめと今後の展望である.2.
ミリ波FMCW
レーダレーダ方式には様々な方式があるが,本論文では 近年急速に応用が進められている
FMCW
レーダを取 り上げる.FMCW
レーダは送信信号を周波数変調し たレーダであり,通常,図1
のような三角状,ある いは鋸波状の送信信号を用いる.このような直線状 の周波数変調信号をチャープ信号(Chirp signal)
とい う.ターゲットから反射した受信信号は,ターゲット までの距離に応じた遅延を有しているので,図のよう に送信信号と受信信号の差周波数成分は一定となり,この周波数をビート周波数,得られる信号をビート信 号と呼ぶ.図
1 (a)
の波形は,周波数が増加する部分(
アップチャープ)
と減少する部分(ダウンチャープ)それぞれのビート周波数から,ターゲットまでの距離 及びドップラ周波数の推定が可能となるため,初期の 自動車レーダ等で用いられていた.しかしながら,複 数ターゲットが存在する場合,各ターゲットにおける
図1 代表的なFMCWレーダの送受信波形とビート信号 Fig. 1 Transmitting and receiving signals and its beat signals of
typical FMCW radars.
ビート信号の対応関係の推定が困難となる問題がある.
近年では,図
1 (b)
に示したアップチャープ(あるい はダウンチャープ)のみのFCMW
レーダ(Fast-FM,
Linear-FM
と呼ばれることもある)を用いるのが一般的である.
図
1 (b)
の送信信号は次式のように表される.x ( t ) = s
0cos (
2 π (
f
ct + M 2 t
2))
(1)
ここで,
f
cは中心周波数,s
0は送信信号の振幅,またM
は次式のように周波数帯域幅(F)
とチャープパルス 掃引時間(T)
て定義される周波数変調度である.M = F
T (2)
送受信アンテナが同一位置にあり,ターゲットまでの 距離を
r
0,対応する伝播遅延時間をτ
,光速をc
とす ると,得られるビート信号は次式となる.x
b(t) = g
′cos (
2π (
f
cτ + f
bt − M 2 τ
2))
(3a)
f
b= Mτ = 2F
cT r
0(3b)
ここで
g
′はビート信号の振幅であり,ターゲットの反 射・散乱及び伝搬に伴う減衰に依存する係数である.また
f
bはビート周波数と呼ばれる周波数成分であり,上記の波形を例えばフーリエ変換すると周波数
f
bに ピークが表れる.それによりターゲットまでの距離が 計測可能となる.この方式においては,通常
T
はターゲットの変動(移動)に対して十分に小さくなるよう選ばれ,この チャープパルスを周期
∆u (
パルス繰返し周期,Pulse Repetition Interval, PRI)
で送信した一連のパルス列に おけるチャープ信号の周波数変動からターゲットの ドップラ周波数,すなわち速度が推定される.また,受信アンテナをアレー化すればアレーアンテナの到来 方向推定原理により,ターゲットの方位が推定できる.
掃引時間
T
のビート信号の送信時間を基準とした時 間をファストタイム(Fast-time)
,一連のパルス列の送 信時間はスロータイム(Slow-time)
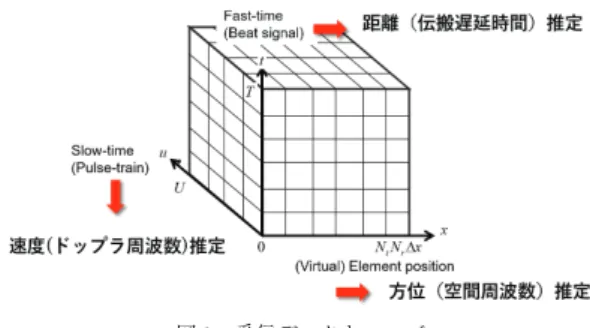
と呼ばれる.した がって,受信アンテナがアレー化された場合,取得さ れるデータは図2
のような3
次元キューブ状のデータ セットとなる.ファストタイム(t)
,スロータイム(u)
, 空間アレー位置(x)
,それぞれに対してフーリエ変換 することにより,距離(ビート周波数),速度(ドップ図2 受信データキューブ Fig. 2 Cubic structure for received data set.
ラ周波数),方位(空間周波数)を得ることができる.
これらの
3
次元キューブデータを用いると様々な解 析が可能となる.例えば79 GHz
帯のミリ波レーダを 用いる場合,最大4 GHz
の周波数帯域が利用可能であ る.最も基本的な周波数解析手法であるフーリエ変換 を用いた場合であっても,数cm
の距離分解能が実現 可能である.ドップラ周波数の分解能は,スロータイ ム観測時間に反比例し,観測時間(=
パルス数× PRI
) の増加により改善可能でありハードウェアに依存しな い.ただし,方位,すなわち角度分解能を改善するた めには,受信アレーアンテナの大開口化が必要となる.その際,虚像の原因となるグレーティングローブの発 生を抑圧する必要があり,最大素子間隔が制約される.
良く知られているように素子指向性が等方性の場合,
この素子間隔は動作周波数の半波長以下となり,多数 の素子が必要となる.なお,レーダの場合の多くは,
比較的指向性利得の高い送受信素子を用いるため,こ の素子間隔の制約は緩和できる.すなわち送受信素子 の指向性により,半波長以上の素子間隔であっても,
グレーティングローブの影響を軽減できる.しかしな がら,通常のアプローチではハードウェアの複雑化,
コストの増加は避けられない.この問題点を効率的に 解決した手法が近年,広く用いられている
MIMO
レー ダである.次章では,MIMO
レーダの原理[10]
に関し て概説する.3.
ミリ波MIMO
レーダ技術3. 1 MIMO
レーダの原理前章でのアレー化の議論は,受信アンテナのみをア レー化したものであった.すなわち
SIMO
レーダであ る.MIMO
レーダにおいては,送信アンテナもアレー 化する.簡単のため,ここでは距離推定の後,ある素 子におけるターゲット距離を基準としたデータ(レンジビンデータ)を取り出し,
1
次元リニアアレー化し たものとする.また距離(レンジビン)の表記は省略 する.送信アンテナ数を
N
t,受信アンテナ数をN
rとする.受信アンテナの素子間隔は
∆x
rであり,先に述べたよ うに通常は中心周波数の半波長( λ
c/ 2)
と設定される.いま,十分遠方の角度方向
θ
にターゲットが存在する と仮定すると,送信アンテナ#1
での時刻u
の受信ア レーのデータは次の形式で表される(注1).x
1( u ) = [
x
11(u) x
21(u) · · · x
Nr,1(u) ]
T= s(u)
1 e
−j2πfcc∆xrsinθ.. .
e
−j2πfcc(Nr−1)∆xrsinθ
(4)
ここでT は転置であり,また
s ( u )
はターゲットから の反射信号の複素振幅である.次に受信アレー軸と平 行に∆x
tだけ送信アンテナ位置をシフトさせた送信ア ンテナ#2
を考えよう.式(4)
に対しては基準点が∆x
t 変化したことに相当するので,x
2(u) = [
x
12( u ) x
22( u ) · · · x
Nr,2( u ) ]
T= s(u)e
−j2πfcc∆xtsinθ
1 e
−j2πfcc∆xrsinθ.. .
e
−j2πfcc(Nr−1)∆xrsinθ
(5)
となる.上式より送信アレーアンテナの間隔を
∆x
t= N
r∆x
r(6)
とし,各ベクトルを結合すれば,素子間隔
∆x
rの2N
r 素子等間隔アレーにおけるSIMO
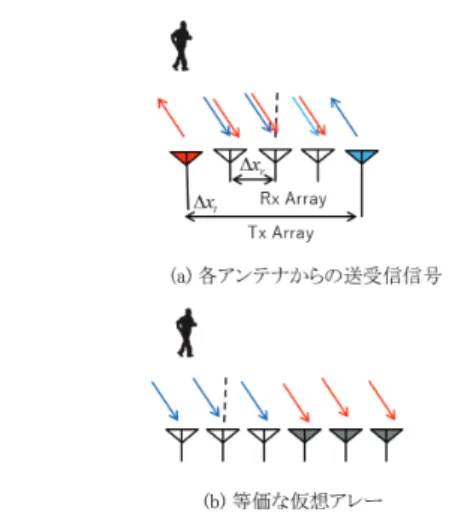
レーダの受信データ と等価となることがわかる.図3
がその概念図である.端的に説明すると,遠方界ターゲットであれば反射波 は平面波とみなすことができ,送信アンテナを基準と した座標系は平行移動に対して不変であるため,各送
(注1):3.のアレーに関する定式化は,本章で引用する到来方向推定に 関する文献の表記に合わせた位相表現としている.式(3a)の実数ビート 信号の複素化の際の定義に依存するが,フーリエ変換の正の周波数成分 より複素信号を定義した場合,スペクトル(周波数)を距離(∝遅延時 間)に対応付けることとなり,位相因子の符号が反転(e−jω→ejω) することに注意されたい.
図3 MIMOレーダによるアレー長増加の原理 Fig. 3 Concept of array aperture enhancement in MIMO radar.
信アンテナが重なる(一致)するように受信アレーを 平行移動した仮想アレー
(Virtual array)
ということが できる.これを送信素子
N
tに拡張すれば,x ( u ) = [
x
1(u)
Tx
2(u)
T· · · x
Nt(u)
T]
T(7)
により,
N
t× N
r素子相当の等間隔SIMO
レーダの分 解能が実現可能となる.たとえば,3
送信,4
受信のMIMO
レーダであれば,12
素子相当の分解能が実現 可能となる.式(7)
の受信信号データモデルを複数波 を含めて一般化すると次式のように表される.x ( u ) = As ( u ) + n ( u ) (8a) A = [
a (θ
1) a (θ
2) · · · a (θ
K) ]
(8b) a (θ
k) = a
t(θ
k) ⊗ a
r(θ
k) (8c) s ( u ) = [
s
1(u) s
2(u) · · · s
K(u) ]
T(8d)
n(u) = [
n
1(u)
T· · · n
Nt(u)
T]
T(8e)
である.ここで
A
は到来波のモードベクトルa (θ
k)
を 列とするN
tN
r× K
行列で,θ
k はk
番目の到来波の到 来方向,K
は到来波数である.なお,a(θ
k)
は送信ア レー及び受信アレーのθ
方向のスティアリングベクト ルa
t(θ), a
r(θ)
のクロネッカ積( ⊗ )
を用いて式(8c)
の ように表すことができる.s (u)
及びn (u)
はそれぞれ 到来派の複素振幅ベクトル,雑音ベクトルである.上記の
MIMO
レーダを実現するためには,どのよう に送信するかが問題となる.同じチャープパルスを同 時に送信すると,干渉のため各送信信号に対する受信データの分離は不可能である.代表的な送信方法とし て,時分割送信方式
MIMO
とスロータイムMIMO
方 式が知られている[10]
.前者は送信パルスを順次(交 互)に送信するものである,同時に送信していないと いう意味では厳密にはMIMO
ではないが,パルス幅 が十分に小さく一連のパルス送信時間内のターゲット の変動が許容できるレベルであれば実用上問題のない 性能を発揮する.後者は送信パルスごとに一定の位相 定数を乗じて同時送信する方式である.この場合,ス ロータイム(図2
のu
軸)に対してフーリエ変換を施 すと,ドップラ周波数において各送信アンテナに対す る応答が分離可能となる.このような二つの方式が存 在するが,総送信電力を一定とした場合は,両者の性 能(推定可能なパラメータの範囲)は等価となる.た だし,1
素子当たりの送信電力を同じとすると後者の 方式では送信電力がN
t倍されるため,検出性能改善 が可能である.時分割送信方式MIMO
では,厳密に はパルス送信時刻が異なるため,多数の送信アンテナ 時の高速移動ターゲットの推定には不向きであるが,システムキャリブレーションが容易であるという利 点が存在する.高速ターゲット存在時の誤差に関して は,文献
[23]
を参照されたい.今回は,比較的低速な ターゲットを想定しており,試作したMIMO
レーダシ ステムにおいて,様々な誤差生じた際のキャリブレー ションの容易さから時分割方式MIMO
を用いること とした.3. 2
不等間隔アレーによる仮想アレー前節の
MIMO
化処理により,実効素子数がN
t× N
r の等間隔アレーに拡張することが可能となった.ハー ドウェアの進展に伴い,実装可能な素子数(N
t, N
r)
の 増加は期待されるが,限られたハードウェア規模(素 子数)で,より大開口化したいという要望は多いもの といえる.パッシブアレーにおける到来方向推定にお いては,最小冗長度アレー(MRA) [13]
や,カトリ・ラ オ(KR
)積アレー[11]
,Nested-array [12]
,Co-prime array [24]
などの不等間隔アレーの2
次統計量である 相関行列を用いた仮想アレー手法が提案されている.仮想素子数を最大化,すなわち最大開口を実現すると いう観点では,最小冗長度アレー
(MRA)
が最適であ る.しかしながら,最小冗長度アレー(MRA)
配置に 関してはクローズドフォーム定式化はできないことが 知られており,素子数が多い場合の準最適配置素子配 置の導出法として,Nested-array
などのアレー配置法 が提案されている.図4 3素子MRAアレー Fig. 4 3-element MRA array.
まず,この不等間隔アレーによる仮想アレー化のコ ンセプトを簡単な例を挙げて説明しよう.
図
4
は3
素子MRA
配置の不等間隔アレーである.角度
θ
方向からの受信信号ベクトルx ( u )
とその相関 行列は,x(u) = s(u) [
1 e
−jω(θ)e
−j3ω(θ)]
T(9a)
R = E[x(u) x
H(u)]
= P
1 e
jω(θ)e
j3ω(θ)e
−jω(θ)1 e
j2ω(θ)e
−j3ω(θ)e
−j2ω(θ)1
(9b)
ω(θ) = 2 π f
cc ∆x
rsin θ (9c)
となる.ここでHは複素共役転置,
E [·]
はアンサンブ ル(スナップショット,ここではパルス)平均,s(u), P
は時刻u
の到来波の複素振幅と電力である.式(9b)
の要素を見ると− 3 ω(θ) ∼ + 3 ω(θ)
までの等間隔に変化 するモードベクトルの位相項を含んでいることがわか る.この位相差は,(符号を含めた)2
素子間の距離差 に対応している.自分自身を含んだ異なる距離差とな る組み合わせとなる要素が,重複しない独立なデータ となる.ここで,R
1/2に対して,重複する要素を削除 して並び変えたベクトルz
を作ると次式が得られる.z
′= √ P
[
e
−j3ω(θ)· · · 1 · · · e
j3ω(θ)]
T(10)
が得られる.これは
7
素子リニアアレーでの受信デー タに相当する.すなわち3
素子の受信アレーで7
素子 相当の分解能の実現が可能となる.ここでは1
波の場 合に関して例示したが,複数波の場合でも各到来波が 無相関であれば,相関行列はそれぞれの線形和となり,上位の議論は成立する.
SIMO
レーダの場合,各ター ゲットからの反射波は一つの送信アンテナによるもの であるため,完全に静止していればコヒーレントであ り適用は困難となる.しかしながら,動きのあるター ゲットに関しては,ミリ波レーダの場合,波長が非常 に短いため,個々のターゲットの独立なわずかな動きにより,信号相関が抑圧され,この仮定が近似的に成 立することとなる.詳細に関しては次節で説明する.
また,この変換により到来波の複素振幅が(実数)振 幅(
√
P = √
E [|s(u)|
2]
)に変換されることに注意されたい.自分自身の距離差が
0
であり,同一となること は自明である.その他の2
素子間の素子間隔が異なれ ば,最大でN
r( N
r− 1 )
素子の等間隔アレーが実現で きる.ただし,通常は同一となる素子間隔が現れるた め,N
rM R A≤ N
r(N
r− 1)
である.K
個の到来波が互いに無相関であると仮定し,重複 素子データも含めて一般化すると次のように表される.z = vec[ R
1/2]
= A ⊙ A
∗s
z+ n
′(11)
ここで
vec[·]
は行列の各列をスタックして結合し,ベクトル化する演算子,
∗
は複素共役,⊙
はカトリ・ラ オ積[11]
である.また,s
zは先の述べた各信号の(実 数)振幅( √
P
i( i = 1 , · · · , K ) )
を要素とするベクトルで ある.上式において重複データを削除する,あるいは 平均を取り一つに置き換えると式(10)
と等価なベクト ルが得られる.3. 3 MIMO
仮想アレーレーダさて,前節の手法を
MIMO
レーダに適用しよう.前 節の議論はPassive array
に関するものであるが,SIMO
レーダにおいても本質的には同じである,唯一の違い はレーダの場合,同一の送信信号に対する反射波を観 測するため,基本的には受信信号は全てコヒーレント(完全相関)波となる.したがって,無相関であると いう仮定を満足しないため正しく機能しない.しかし ながら,ミリ波レーダのような高周波レーダの場合,
送信信号の波長が非常に短いため,ターゲットのわず かな移動により反射波の位相は大きく変化する.例え ば,
76.5 GHz
帯ミリ波レーダの場合,波長は約4 mm
であるので,ミリメータオーダの移動で位相(
式(9a)
の
s(u))
は数十度回転することとなる.ターゲットごとに独立な位相変化(異なる動き)をするものと仮定 すると相関が低下し,前節の変換が利用可能となる.
この動きによる位相の変化はドップラ周波数シフ トをもたらし,ドップラ周波数の差が信号相関抑圧 に関係づけられる.各々のターゲット(反射点)の 速度をそれぞれ
v
1, v
2とするとドップラ周波数の差は∆ f
d= 2(v
1− v
2) f
c/c
となる.中心周波数が76.5 GHz
の場合,速度差がわずか4 mm/s
で約2 Hz
のドップ ラ周波数差を得ることができる.図5
に二つターゲッ図5 ドップラ周波数差と相関係数の大きさ(中心周波数 76.5 GHz)
Fig. 5 Mganitude of correlation coefficient for Doppler frequency difference with several observation intervals (Center fre- quency 76.5 GHz).
トのドップラ周波数差とその際の相関係数の大きさを 観測時間(パルス数
× PRI
)をパラメータとして計算 した結果を示した.観測時間が0.1 s
(100 ms
)程度で は5 Hz
のドップラ周波数差がある場合であっても0.6
程度までしか相関係数の大きさは低下しないが,0.5 s
(500 ms
)の平均時間が確保されれば,わずか2Hz
の差であっても0.2
以下程度まで低下することがわか る.なお,ここでは簡単のため角度のみで議論を進め たが,実際には,事前に各素子データの距離推定を行 い,同一距離(同一レンジビン)データに対して角度推 定を行うこととなる.すなわち,同一レンジビン(厳 密には距離分解能)内のターゲットがスナップショッ ト(パルス)平均により,相関抑圧されれば,近似的 に適用可能となる.以上の議論から分かるように,静 止したターゲットに関しては,本手法は有効とは言え ないことに注意されたい.不等間隔アレーに関しては,先に示した文献のよ うに幾つかの配列アルゴリズムが提案されているが,
MRA
配置[13]
が最適配置であり,所望の素子数に対 するMRA
配置が得られている場合は,それを用いる ことが最適といえる.MIMO
レーダの場合,送受信双 方がアレーであるため,どのようにその知見を利用す るかが問題となる.まず,受信アレーに関しては,前 節の結果を用いて最小素子間隔を∆x
rとしたMRA
配 置し,受信アレーで形成される仮想アレーがカトリ・ラオ積仮想アレー処理により,重複しないような素子 配置,素子間隔の送信アレーとすることを考える,こ の場合,送信アレーに関しては,受信アレーで実現さ
れる仮想素子数を
N
rM R Aとして,以下の最小素子間 隔のMRA
アレーを形成すれば良いことがわかる.∆x
tM R A= N
rM R A∆x
r(12)
ここで,送信素子も
MRA
配置のような不等間隔ア レーであることに注意されたい.なお,ここでは,受 信を最適化後,送信を最適化するような流れで,送受 を分けて取り扱っており,送受を組み合わせて同時最 適化した際にはより良い配置が存在する可能性がある.この点に関しては後ほど考察する.
式
(7)
のようにデータベクトルを形成し,式(9b)
の 相関行列推定後,重複するモードベクトルとなる要素 を削除し,式(10)
のように再配置することにより,大 規模仮想アレーが形成される.N
t素子のMRA
配列で 生成される可能アレー素子数をN
tM R Aとおくと,総 素子数N
はN = N
tM R A× N
rM R A(13)
となる.参考までに前節の(一つの送信アンテナに対 する)
3
素子受信アレーに対し,送信アンテナを追加 し,2
送信とMIMO
化した際の仮想アレー形成の流 れを図6
に示す.同図には1
ターゲット存在時のモー ドベクトルがMIMO
及びKR
積仮想アレー処理によ り変換されるのかを併せて示した.このようにMIMO
化処理,及びMRA
アレーなどの不等間隔アレーに対 するカトリ・ラオ(KR)
積仮想アレー化処理を併用す ることにより効果的に大開口化することができる.なお,ここでは仮想アレー化にる素子数(開口長)
の増加に関して議論したが,アレーのモードベクトル と同形である
Vandermonde
構造を有するデータに広 く適用可能である.周波数データに対しての適用例は 文献[25]
を参考にされたい.さて,
MRA
素子配置は解析的に求められないこと が知られている.いままでの議論では送受信をそれぞ れMRA
配置として組み合わせたが,送受を分けて最 適化しているため,これが最適化には疑問が残る.探 索的に検証したところ,わずかではあるが,より効果 的な配置が存在することが分かった.送信を2
素子 として,受信素子数を変えた場合の検討結果に関して は[26]
で報告した.ここでは,送信素子数を4
素子 とした場合の例を示す.表1
に本検討で探索的に求 めた送信4
素子(N
t= 4)
時の幾つかの受信素子数に 対する最適MIMO-KR
仮想アレー配置を示した.こ図6 MRAアレーを用いたMIMOレーダにおける仮想ア レー(Nt=2,Nr=3)
Fig. 6 Vitual array for MIMO radar by using MRA (Nt =2, Nr=3).
表1 最適素子配置MIMOレーダの素子配置(Nt=4,Nr=2 から8)
Table 1 Element arrangement of optimal MIMO radar.
Nr 送信素子配置 受信素子配置 最大仮想素子数
2 0 3 12 18 0 1 39
3 0 7 28 42 0 1 3 91
4 0 13 52 78 0 1 4 6 169
5 0 21 84 126 0 2 7 8 11 271
6 0 31 124 186 0 1 4 10 12 17 399
0 1 8 11 13 17
7 0 39 156 234 0 1 10 13 15 17 21 503 0 8 15 17 20 21 31
8 0 57 228 342 0 4 5 17 19 25 28 35 727
こで素子配置の数値は送信,受信それぞれの最小素子 間隔
(∆x
t, ∆x
r)
を1
単位とした際の座標に相当する.図
7
は従来のMIMO
レーダ(同図のULA
)と先の議 論による一般的なMRA
配置を用いた場合及び探索 的に導出した配置(同図のproposed
)により実現され る等間隔仮想アレーの素子数を受信素子数が2
素子 から8
素子(N
r= 2 ∼ 8)
に関して図示したものであ る.MRA
に関しては2
通りの結果を示している.こ こで,‘MRA (Restricted Array)’
は,全ての仮想素子が図7 各アレー配置における最大仮想素子数(Nt=4) Fig. 7 Number of virtual elements in various MRA-KR-MIMO
array.
等間隔となるという条件の下で導かれたアレー配置で 算出された仮想素子数である.一方,
‘MRA (General
Array)’
は,仮想素子配置の一部(通常は端部)に不等間隔な素子が存在することを許容した条件下で導かれ たアレー配置
[13]
で算出されたものである.なお,こ の場合の仮想アレー素子数は,不連続な部分は除き,等間隔で配置されている仮想素子のみを素子数として いる.この解析例からも分かるように,通常の
MIMO
レーダでは,実在素子数をN
t, N
r として,MIMO
化 により仮想素子数がN
t× N
rとなり,更にKR
処理に よりN = 2N
t× N
r− 1
となる.このようにKR
処理 の効果は約2
倍に留まる.一方,送受ともにMRA
と した不等間隔アレーに対してKR
処理に基づく仮想ア レー化を施すことで,飛躍的に素子数を増加できるこ とがわかる.また,送受信素子数が多い場合(今回はN
r= 5
以上),増加比率は大きくはないが,より最適 な素子配置が存在することもわかる.なぜこのような 増加が可能であるかの原因に関しては複数の要因が考 えられるが,主なものは,受信アレーのKR
処理にお いて,両端のみが2∆x
r離れた配置となる場合である.この場合,送信アレー間隔を適切に選択することによ り,上記で生じた欠落素子部分を隣接する仮想アレー の(
2∆x
r離れた配置となった)素子で補填することが できるためである.3. 4
屋内人物位置推定への応用本節では,前節の
MRA-MIMO-KR
仮想アレーを用 いた実験結果を通して,本手法の有効性を明らかにす る.ここでは,屋内における複数人物のトラッキング 及びテーブルに着席している人物の検出結果例を示図8 実 験 環 境 Fig. 8 Experimental environment.
表2 実 験 諸 元 Table 2 Experimental specification.
送受素子形状 ULA,MRA アンテナ高 送信:2.0 m,受信:1.9 m
アンテナ俯角 15◦
素子数(送信Nt,受信Nr) (2,4) 中心周波数 76.5 GHz 最小受信素子間隔∆d 3.02mm 周波数帯域幅 500 MHz 掃引時間 100µsec.
無信号区間 10µsec.
MIMOとしてのパルス繰り返し間隔 220µsec.
図9 実験に用いたULA, MRAアレー(Nt=2,Nr=4) Fig. 9 Element spacing of the arrays (Nt=2,Nr=4).
す.実験を行った部屋の外形と実験に用いた試作ミリ 波レーダの諸元を図
8
及び表2
に示した.ここでは76.5 GHz
帯の500 MHz
帯域幅のレーダを用いた.送 信は2
素子,受信は4
素子であり,それぞれ等間隔リ ニアアレー配置(ULA)
,最小冗長度アレー配置(MRA)
の2
通りのアンテナ用意し,各々のアレー配置におけ る実験を行った.各送受信アレーを図9
に示す.表1
の標記を用いると各アレーの素子配置は,ULA
の送 信アレーで(0, 4)
,その受信アレーは(0, 1, 2, 3)
であり,MRA
の送信アレーは(0, 13)
,受信アレーは(0, 1, 4, 6)
となる.ここで最小素子間隔は3.02 mm (
約0.7 λ)
で ある.今回試作したアレーではULA
配置を用いた通 常のMIMO
処理(3.1
)により8
素子相当(2 × 4)
の開図10 人物トラッキング実験結果 Fig. 10 Human tracking experimental results.
口長が実現される.また,この
ULA
に対して,KR
仮 想アレー処理(3.3)
を施すと15
素子相当,更にMRA
に対してKR
仮想アレー処理(3.3)
を施すと39
素子 相当の等間隔仮想アレーが実現される.また,送信ア ンテナ制御に関してはMRA, ULA
ともに3.1
で述べ た時分割MIMO
方式とし,表2
に示すとおり掃引時 間100 µ sec
のチャープ信号を10 µ sec
の無信号区間 を挟んで交互送信した際の受信アレーの信号を合成しMIMO
化している.したがってPRI
は220 µsec
とな る.なお,ここで示す実験は帯域幅500 MHz
で行っ たものであり,距離分解能に関してはより広帯域なシ ステムの利用による改善が可能である.3. 4. 1
人物トラッキング実験ここでは,
3
名の人物がレーダ付近(2 m)
から遠方(6 m)
に向けて並んで歩いた場合(
速度約1 m/s)
のト ラッキング結果を示そう[27]
.解析においては,不要 な静止物体のクラッタを抑圧するため1
秒ごとの取得 データに対してドップラ周波数解析を行い,0 Hz
付近 の応答を除去する処理(Moving Target Indicator, MTI
) を施している.その処理を施さなければ,壁面や什器 等の強い応答により,人物の応答がマスクされる場合 がある.図
10
に通常のULA
を用いたMIMO
レーダによる図11 人物位置推定結果 Fig. 11 Human Position estimation results.
トラッキング結果
(ULA-MIMO w/o KR)
,そのデータ に対してKR
処理を施したもの(ULA-MIMO w/ KR)
, 更にMRA
を用いたMIMO
レーダによるトラッキン グ結果(MRA-MIMO w/ KR)
を示した.なおトラッキ ングには線形カルマンフィルタ[16]
を用い,200 msec
ごとの観測データに対して,初回のイメージング結果 における検出ターゲット位置を基準として,ゲート幅 のレンジ距離と角度幅をそれぞれ1.0 m
,10
◦として 推定を行った.これらの結果から分かるように2 m
付 近では,各ターゲットの角度差が大きいため通常のULA-MIMO
レーダにおいても明瞭に分離されるが,距離が離れるほどターゲット間の角度差が小さくな り,
4 m
付近ではULA-MIMO
での分離が困難となり 正しく追跡されていない,ただし,このデータに対し て(ULA
配置のまま)KR
仮想アレー処理を施すと,分 解能が約2
倍となり,特性が改善されている.更に6 m
付近まで移動した場合には,ULA-MIMO
ではKR
処理を施しても分離困難となるが,MRA-MIMO
を用 いた場合はほぼ正確に追跡されていることがわかる.参考までに図
10
において青及び赤の矩形領域の歩行 時の2
次元ビームフォーマ法(Beamformer)
により推 定された電力値(最大値で正規化)のイメージング結 果を図11
に示した.このように不等間隔アレー配置を適切に用いると,
同じハードウェア規模のまま,動きのあるターゲット に対する分解能を著しく改善することが可能となる.
図12 着席している人物の検出結果 Fig. 12 Human detection experimental results.
3. 4. 2
着席している人物の検出実験次にテーブルに着席している人物の検出に関する実 験結果を示す.
KR
仮想アレー処理で述べたように,この仮想アレー化手法はターゲットからの反射波が無 相関であることを前提としており,相関が高くなると 残存した相関項の影響によるターゲット位置のバイア スや不要応答が生じる.テーブル等に座っている人物 は,ほぼ静止しており,その意味では本論文での仮想 アレー化処理には不適であるようにも思われる.しか しながら,この場合,ターゲットの移動がほとんどな いため,観測時間を長くとることができ,
MTI
処理の 効果向上と人物のわずかな動き(揺らぎ,呼吸など)の相違による相関抑圧が可能となる.今回は
0.5
秒を 観測時間とした際の結果を示す.なお,以下の実験結 果は,この0.5
秒ごとの推定を10
秒間行い,全データ 取得時間内の各位置の最大値をプロット(Max Hold
) している.これは各観測時刻ごとに人の動き(揺らぎ)により各人物の反射電力強度が変動し,位置の明瞭な 表示が困難となるためである.
図
12
に直線のテーブル及びラウンドテーブルに着席 している人物の検出をMRA-MIMO KR
レーダで行っ た結果を示す.この結果は10
秒間の推定結果に対して
Max hold
したイメージング結果を示している.ほ ぼ人物の位置が特定されていることがわかる.なお(X,Y ) = (2, 3) m
付近に現れている応答はMTI
処理の 際に残存した柱部分からの強いクラッタ成分である.この結果は
0.5
秒の観測時間の結果を示したが,MTI
処理に対する観測時間を長くすることにより,結果の 改善(クラッタ成分の軽減)が可能である.これらの 実験結果の更なる詳細は文献[28]
を参照されたい.4.
ミリ波合成開口レーダ技術4. 1
合成開口レーダの原理合成開口レーダ
(Synthetic Aperture Radar, SAR)
処 理[17], [18]
もレーダの角度分解能を改善する代表的 な手法の一つである.この処理の場合,前節までの議 論とは異なり,レーダが移動するプラットホームに搭 載されており,レーダの移動の移動に伴い取得された 一連のデータセットをアレーとみなすものである.し たがって,原則としてデータ取得時間内のターゲット の移動が無視できる場合,SISO
レーダ(1
送信1
受信)
システムのみで高分解能化が実現可能となる.筆者ら の研究グループでは,2010
年代半ばより車載ミリ波 レーダによる側方監視・イメージング技術として研究 を進めてきた[19], [20]
.以下では,その応用例を通し て,ミリ波レーダによるSAR
処理に関して概説する.SAR
においても,移動に伴う受信データを(仮想)アレーとみなすという点では,前節までのアレー処理 と類似であるが,二つの点で先の固定されたレーダと は異なる特徴を有する.まず一つは,アレーとしての 最少観測間隔である.固定された
SIMO/MIMO
レーダ では,動作波長の半波長(∆x ≤ λ/2)
であったが,SAR
では,送信アンテナも同時に移動するため,モノスタ ティックレーダ(送受が同一位置)である場合,移動 に伴うターゲットによる反射信号の位相変化量が2
倍 となる.したがって,厳密には動作周波数の1/4
波長(
∆x ≤ λ/4
)の間隔でのデータ取得が必要となるが,2.
で述べたように送受信素子の指向性に応じて,より広 い間隔での観測が可能となる.
もう一つの特筆すべき特徴は角度分解能である.
SAR
では角度分解能はターゲットまでの距離により変 化し,プラットホームの移動方向,すなわちSAR
によ り形成されたアレー素子の並ぶ軸方向(アジマス方向 と呼ぶ)に対する空間分解能が一定となる[29]
.先のMIMO
レーダの場合,角度分解能は形成されるビーム 幅,すなわちアレー長(アンテナ開口)より決定される.アレーのビーム幅
∆ θ
Aは,アレー長D
Aと波長λ
を用いて,∆ θ
A≃ λ
D
A(14)
と表すことができる.したがって,距離
R
0における ターゲットのアジマス分解能は,∆R = R
0∆ θ
A≃ λ R
0D
A(15)
となり,
R
0の増加,すなわち遠方ターゲットほどター ゲットの分離が困難となる.しかしながら,SAR
の場 合,ビーム幅∆θ
Aの範囲にわたって電波を照射し移 動しているため,アジマス方向で考えると,∆ θ
AR
0の 範囲にわたって電波の照射を受けることとなる.よっ て,合成開口長L
は,L = R
0∆ θ
A≃ λ R
0D
A(16)
となり,先の述べた
2
倍の位相変化を考慮すると2L
が式(14)
のアレー長に対応することとなる.したがっ て,合成開口後のアジマス分解能∆R
′は,∆R
′= R
0λ 2L ≃ D
A2 (17)
となり,距離に依らず一定となることが分かる.
4. 2 Backprojection
による合成開口処理SAR
を実現する計算手法には様々なアルゴリズムが 存在する[17]
.バッチ処理的な手法が多いが,ここで は車載レーダにおけるリアルタイム処理の実現可能性 が期待されるバックプロジェクション(Backprojection
, 以下単にBP
法と呼ぶ)
法[30]
に着目している.この 手法では,プラットホームの移動に伴い取得された データに応じて,順次,SAR
画像を更新でき,また レーダに対する幾何的制約が少ない,すなわち任意 の走行経路形状に容易に適用できるという特徴があ る[31], [32]
.以下に,このBP
法を概説する.車載レーダにおける
SAR
応用は,SAR
の特性上,前方(及び後方)監視目的には不向きであり,側方監 視時に最も効果を発揮する.ここでは光学カメラや
LiDAR
での観測が困難な視界不良時の周囲監視及び周囲ターゲット(とランドマークを含んだマップ情 報)を用いた自己位置推定を目的とし,図
13
に示すよ うに速度v
0で走行している車両においてレーダを走 行方向斜め前方を向け観測するものとする.ここで,u
j( j = 1 , 2 , · · · )
は,スロータイム時刻(パルス番号に図13 SAR処理における座標系 Fig. 13 SAR observation Senario.
相当)であり,走行方向をアロングトラック
(Along
track)
方向,その直交方向(走行方向側方)をクロストラック
(Cross track)
方向という.またクロストラッ ク方向とレーダの視線方向とのなす角θ
sをスクイン ト角(Squint angle)
という.時刻
u
j におけるレーダ(送受信アンテナ)の位置 を( x , y, z ) = ( x
j, 0 , z
R)
とする.ここでx
j= v
0u
j で あり,z
Rはアンテナ高である.ターゲットの位置を(x
k, y
k, z
k)
とするとターゲットまでの距離は,r
k,j= √
( x
k− x
j)
2+ y
k2+ (z
k− z
R)
2(18)
で与えられる.このときの受信ビート信号はこの
r
k,j を式(3a)
に代入すればよい.このビート信号に対する(
順方向のフーリエ変換による)
ビートスペクトルは次 式となる.X
b(j)(r) = ∑
k
σ
ke
j4πc fcrk,jsinc ( 2πF
c (r − r
k,j) )
(19)
となる.ここで
σ
kはk
番目のターゲットの(伝搬減 衰等を含んだ)複素反射係数である.BP
法では,得られたビートスペクトルに対して,伝 播遅延に伴う位相回転に補正を加え,与えられた投影 面にターゲットの複素反射係数σ
k をマッピングし2
次分布を再構成するイメージング手法である.ここで は高さz
p のx y
面にマッピングすることとし,次のr
map(j)( x , y)
を定める.r
map(j)( x , y) = √
( x − x
j)
2+ y
2+ ( z
R− z
p)
2(20)
各観測地点(パルス)のマッピング面上の投影スペク図14 バックプロジェクション法によるSAR画像再構成 の概念
Fig. 14 Concept of SAR Backprojection algorithm for image re- construction.
トルは次式となる.
X
(j)b
( x , y) = ∑
k
σ
ke
j4cπfcrk,j· sinc ( 2 π F
c ( r
map(j)( x , y) − r
k,j) )
(21)
この投影面を基準とした補正係数
S
(j)r e f
( x , y)
による位 相補正(逆伝搬に相当)を行い,次のように各パルスに より得られたビートスペクトルを重畳することでター ゲットの反射係数の2
次元分布P
B P(x, y)
が再構成さ れる.P
B P( x , y) = 1 N
u+ 1
Nu
∑
j=0
X
(j)b
( x , y) S
(j)∗r e f
( x , y) (22a) S
r e f(j)(x, y) = e
j4πcfcr(j)
m a p(x,y)
(22b)
上式の
N
uは重畳する観測点(パルス)数である.実 際の処理では電波を照射していない角度領域までを重 畳すると雑音の増加をもたらすため,送受信アンテナ の指向性とターゲットまでの距離に応じて選択するこ ととなる.以上の信号処理による画像再構成の流れを 図14
に示した.なお,プラットホームが速度
v
0で走行しているた め,(静止)ターゲットにおいても,その距離にはドッ プラ周波数シフトに伴う変位が生じる.y
軸方向を基 準としてレーダからターゲットを見込んだ角度をθ
d とすると,ドップラ周波数シフトに伴うターゲット距 離の変位は図15 スクイント角と観測時間に対する実行開口長の変化 Fig. 15 Effective array aperture in several squint angles for obser-
vation time.
∆r
d= f
cF T v
0sin θ
d(23)
で与えられる.このシフト量が大きい場合は,式
(21)
の補正の際に,ドップラ周波数シフトの補正を加える 必要がある.4. 3
車載レーダによる側方イメージングの実現可 能性まず,車載ミリ波レーダによる斜め前方監視のフィー ジビリティスタディを行う.検討すべきパラメータは 多数存在するが,ここでは主要パラメータに限定して,
実現可能性を示す.
先の議論のように,ターゲットまでの距離に応じて ビームの照射時間が変化するため,ここでは,その目 安としてターゲット方向から見込んだアンテナの移 動距離を実行開口長としてプロットした.その結果を 図
15
に示した.スクイント角が大きくなるほど,す なわち走行方向に向けるほど,SAR
の効果が小さくな るが,例えばθ
s= 45
◦の場合,時速40 km
時の20 ms
の観測時間で約18 cm
の実効アレー長に相当する移動 量となることがわかる.76 GHz
帯のミリ波レーダの 場合,波長は約4 mm
なので45 λ
であり,SAR
処理 の場合の位相変化は通常のアレー2
倍であることを考 慮すると90λ
のアレーを実現できることがわかる.こ のアレー長は実アレーとしては搭載困難なサイズであ り,SAR
の優位性が分かる.パルス繰返し周期(PRI)
はλ/ 4
が理想であり,今回の場合1 mm
となる.ただ し,車載レーダの場合,観測距離を確保するため,あ る程度の利得を有する指向性アンテナを送受に用いる であろう.この場合,アレーファクタが配置と指向性 の積となることから分かるように,虚像(グレーティ ングローブ)の抑圧が可能となる.図16
にPRI
と車図16 PRIと速度に対する観測間隔
Fig. 16 Spacial observation period for various PRI and velocity.
図17 ドップラシフトによるターゲット距離の変動量 Fig. 17 Target distance displacement by Doppler freuqnecy shift.
速に対する観測幅
(∆x = v
0∆u)
を示した.最新のミリ 波レーダでは数十µ s
のパルス幅での掃引が実現され ており,低速走行時には十分実現可能なレベルといえ る.最後にドップラ周波数の影響を示す.図17
にパ ルス幅T = 100 µs
時のドップラシフト量を示した.θ
s= 10
◦の側方監視時では,80 km/h
の速度であって も10 cm
以下であるが,θ
sを大きくするにつれ,変動 量は大きくなる.ターゲットの位置のずれのみであれ ば大きな問題ではないが,BP
法における位相補正量 に関係するため合成開口時の利得(ピーク電力値)の 低下をもたらす,したがって,理論的には補正を加え ることが望ましいといえる.なお,ビート信号取得時のサンプリング周波数に関 しては,観測距離をカバーしビートスペクトルにおい て折り返しひずみが生じないよう設定すればよい.パ ルス幅が短くなるほど高い周波数でのデータ取得が必 要となり,データ量の増大をもたらす点に注意が必要 である
[33]
.表3 車載ミリ波レーダ諸元
Table 3 Specification of the automobile millimeter-wave radar.
レーダ方式 FMCW (SISO) 送受信アンテナ 標準ゲインホーン 中心周波数(fc) 76.5 GHz 周波数帯域幅(F) 500 MHz 掃引時間 100µsec.
パルス繰返し周期(PRI,∆u) 220µsec.
走行速度(v0) 約20 km/h
アンテナ高(zr) 1.27m
投影面高(zp) 1.27m
スクイント角(θs) 0◦,45◦,70◦
レーダ俯角 6◦
合成開口角度範囲 ±25◦
図18 実験車両とミリ波レーダ Fig. 18 Experimental platform and radar.
4. 4
車載レーダによる側方イメージング実験結果 本節では,試作したレーダを用いた実験結果を通し て,ミリ波車載SAR
による側方イメージングの有効性 を検証する.表3
にレーダ諸元,図18
に実験車両と レーダの外観を示した.表3
における合成開口角度範囲は,式
(22a)
で用いるデータの角度範囲であり,今回は強い指向性を有しているため,主ビーム周辺のみ とした.実験機材の制約のため,やや高い位置にレー ダを搭載したため,俯角を付けた観測を行っている.
また,この実験では車両のメーターの速度を基に推定 した速度を用いてイメージングを行っている.また直 線走行を仮定し,車体の動揺等の補正は施していない.
SAR
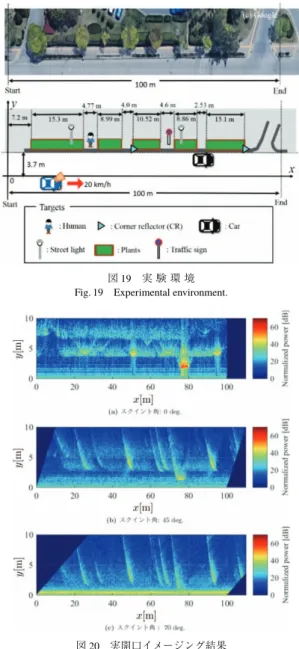
イメージング実験は,新潟大学構内において 実施した.図19
に実験環境の様子を示す.歩道上の 植え込み,道路標識と該当同図に示すように,人物,車両及び参照ターゲットとして
3
面コーナーリフレク タを配置した.まず実開口イメージング結果を示す.これは単にレーダの視線方向に沿ってターゲット応答 を各イメージング領域中の最大値を
0 dB
と正規化し てプロットしたものである.図20
がθ
sをそれぞれ0
◦, 45
◦, 70
◦ とした場合の結果である.実開口イメー ジングでは,図20 (a)
で顕著に認められるようにアン テナのビーム幅に応じてターゲットを中心に放物線上図19 実 験 環 境 Fig. 19 Experimental environment.
図20 実開口イメージング結果 Fig. 20 Real aperture imaging results.
の軌跡が描かれる.