招待論文
Society5.0 に求められるスマートセンシングと超知性ネットワーク技術
山口 弘純
†a)Smart Sensing and Super-Intelligent Networking Technologies for Enabling Society5.0 Systems and Applications
Hirozumi YAMAGUCHI
†a)あらまし 本論文では人間中心のセンシング・AI解析・フィードバックを行うことで社会課題の解決を目指す
Society5.0の概念に基づき,実世界アプリケーションを実現するためのスマートセンシングに関するプロジェク
トを幾つか紹介する.また,それらにより多地点から得られる大量の分散センシングデータを集約・解析してし て活用する「超知性」ネットワーク技術の動向について述べる.前者については特に人とモノの存在や状態をサ イバー空間に取り入れて活用するための技術にフォーカスし,スマート空間におけるモノやビル設備機器の位置 や属性推定に関する筆者の取り組みを紹介する.後者については,Federated Learningをはじめとする分散AI技 術の動向や,その概念に基づく実世界コンピューティングプラットホームの動向や要素技術を俯瞰し,それらの 技術により実現される将来社会を議論する.
キーワード Society5.0,サイバーフィジカルシステム,スマートセンシング,超知性ネットワーク,実空間コ ンピューティング
1.
ま え が き1. 1
背 景第
5
期科学技術基本法において示されたSociety5.0
では,IoT
により人とモノ,環境がつながり,フィジ カル空間(現実空間)からサイバー空間(仮想空間)にセンシングデータが集約され,
AI
により新たな価値 創造と知識共有がなされるとともに,適切なソリュー ションを現実空間にフィードバックすることで,個々 の人々がそのメリットを享受できる社会の実現が謳わ れている.これにより,農業などの第一次産業,工場 生産,交通とスマートシティ,エネルギー,ヘルスケ ア,地域活性化など,様々な社会システムにおける課 題解決とその高度化が期待されている.筆者が所属す る大阪大学は,平成30
年度文部科学省「Society 5.0
実 現化研究拠点支援事業」における全国唯一の採択組織 であり,「ライフデザイン・イノベーション研究拠点」†大阪大学大学院情報科学研究科,吹田市
Graduate School of Information Science and Technology, Osaka University, Suita-shi, 565–0871 Japan
a) E-mail: [email protected] DOI:10.14923/transcomj.2020AII0002
として心と体の健康増進や
QoL
(Quality of Life
)の向 上,学びや楽しみの実現を目標としている.学校での 授業集中度,家庭やオフィスでの生活行動データ,ス ポーツ活動時のバイタルデータといった個々人に関す る様々なデータをセキュアに集約するパーソナル・ラ イフ・レコードデータベースの構築と活用により,心 と体,社会の健康実現を目指した実践的研究が推進さ れている[1]
.米国
NSF
主導で2006
年頃に提唱されたサイバー フィジカルシステムでは,組込システムと物理的な実 世界とのインタラクション全体を系として捉える概念 が基本となっている.一方Society5.0
は,その概念を 基礎としながらも,人間の思考や行動,それらの周辺 環境を含む異種多様で動的な状況を高度なセンシング 技術(スマートセンシング)で獲得・理解し,快適性 や安全性・健康などを目的とした人間中心のフィード バック制御を行うことが重要視されている点でサイ バーフィジカルシステムとは異なる.特に,人やモノ,それらの状態や有する知識,行動パターン,生成される データなどを可能な限りサイバー空間に取り込むこと ができれば,現実空間の高次理解が可能となり,それ に伴うフィードバック制御も高度化できるという点で,
人やモノを中心としたスマートセンシングは重要であ る.例えば各個人がウェアラブルデバイスやスマート フォンにより周辺の人々との位置関係や対話状況,周 辺気流などを把握し,
AI
が状況判断を行うことで,コ ミュニケーションの定量化や,新型コロナウィルスの 感染リスクのリアルタイム注意喚起といった応用シス テムが実現できる.また,これまではサイバー空間に 取り込まれていなかったモノの位置や状態がIoT
によ り把握・制御されることで,例えば食事内容の理解に よる健康維持や服薬支援,室内空間サイズやパーティ ションに応じた自動最適空調なども可能となる.一方,スマートセンシングにより生成された,現実 空間の詳細で大量のリアルタイムデータはその理解と フィードバック生成のために
AI
解析される.そういっ たデータはプライバシー,データ伝送遅延,伝送にか かるエネルギーなどを考慮すれば,エッジコンピュー ティングのような機構によりなるべくローカルで処理 されるべきであり[2]
,更に,そのような「地産地消」で得られた知識や知性は公共の利益に向けて統合的に 活用されるべきである.例えば,様々なビル環境で得 られた省エネルギー空調の学習結果を統合できれば,
多くのビルにおける空調の効率化が早期に達成できる 可能性もある.また,高度交通システムにおいて各車 両が撮影したヒヤリハットシーンを判定する学習モデ ルを統合すれば,ヒヤリハットシーン収集のクラウド ソーシング化に大きく寄与する
[3], [4]
.これに対し,近年では
Federated Learning
や差分プライバシーなど,局所的な知性を集約してより広範囲で汎用的な知識を 獲得するための分散
AI
技術の研究が進んでいる.そ ういったいわゆるメタ知性あるいは超知性を局所知性 から獲得する技術は,Society5.0
が描く,AI
による理 解とフィードバックループを大量のデータで実現する ためのキーテクノロジとなる.超知性を実現するため の分散システム技術(超知性ネットワーク技術)の重 要性はますます高まっている.1. 2
本論文の内容と構成本論文では上記の視点に基づき,
Society5.0
の概念 に基づく実世界アプリケーションを実現するためのス マートセンシングに関するプロジェクトを幾つか紹介 する.また,それらにより多地点から得られる大量の 分散センシングデータを集約・解析してして活用する「超知性」ネットワーク技術の動向について述べる.前 者については特に人とモノの存在や状態をサイバー空 間に取り入れて活用するための技術にフォーカスし,
スマート空間におけるモノやビル設備機器の位置や属 性推定に関する筆者の取り組みを紹介する.後者につ いては,
Federated Learning
をはじめとする分散AI
技 術の動向や,その概念に基づく実世界コンピューティ ングプラットホームの動向や要素技術を俯瞰し,それ らの技術により実現される将来社会を議論する.2.
モノのスマートセンシング2. 1
空間におけるモノの把握の重要性と課題 筆者の研究グループでは,人がモノを使って活動す るオフィスや家庭,あるいはモノを求めて移動する 小売店舗などにおいて,RFID
タグを添付したモノの 絶対位置及びその種別を判別する手法を開発してい る[5], [6]
.同手法では,対象空間の人々の移動により 生じるRFID
の位相並びに電波強度の時間変化からモ ノの使用状況を判断する.加えてそれらの人々の位置 情報を深度センサー等で取得し,モノの使用開始及び 終了時の人の位置情報を利用して,モノの絶対位置の 推定を行う.また,モノ同士の位置や使われ方の類似 性を導出し,モノの属性を推定する.電源を必要としないパッシブ
RFID
システムは在庫 管理での利用が多い.例えば最近ではウォルマートや ユニクロといった大型店舗が商品管理に活用してお り,Amazon
の無人店舗(Amazon Go
)でも用いられ ている.一方で,近年ではリーダーとアンテナの性能 向上により,数m
から10m
程度離れた距離のパッシ ブRFID
タグから得られる反射波の位相や電波強度を 正確に取得し,単なるタグID
の読み取りだけではなく その位置推定を行う研究が増えてきている[7], [8]
.こ れらは例えば空間全体をなるべく少ないアンテナでカ バーし,複数のタグの位置推定を行うことで,モノの管 理を容易にする技術である.これらには主にマルチパ スによる位相の不確実性や電波強度の揺らぎがあるた め,位置推定のアルゴリズムの中でそれらの不確実性 への対処を実装した[9]
のような方法や,別の情報源を 用いることで精度を補完する[10]
などの方法がある.しかし,前者は例えば金属製の棚などが並ぶ環境など,
実空間の様々な電波環境は考慮されておらず,後者に おいてはコンピュータビジョンと
RFID
を組み合わせ てモノのトラッキングを支援しているため,モノが カメラから遮蔽された場合には追跡性能が低下する.本研究では,空間内を移動する人の位置情報をプラ イバシーリスクが低い距離センサーで取得するととも に,オフィスや倉庫といった空間において,人がモノ
図1 RFIDシステム Fig. 1 RFID system.
を動かすことで生じる
RFID
タグからの反射波の位相 変化を検知し,それらを突合してモノの絶対位置を推 定する.動かされないモノについても,人体遮蔽によ る位相及びRSSI
の変化を検知し,位置的な類似性を 推定する.また,モノの使われ方や位置の類似性から モノを分類し,種別をラベリングすることで,それが あるべき位置やその属性を推定する新しい手法を提案 している.2. 2 RFID
システム本論文では
RFID
システムとして,EPC Global
のClass 1 Generation 2
規格[11]
(ISO18000-6C
)に準拠 したUHF RFID
を利用している.RFID
は図1
に示す ように,リーダーはアンテナを経由してRFID
タグに コマンドと搬送波を送り,RFID
タグはリーダーから の電波で動作電力を得て,搬送波を変調しID
を送信 する.市販の多くの商用RFID
リーダーでは受信信号 の強度(RSSI (dBm)
)並びに送信波と受信波の位相差(
[0, 2π] (rad)
)を取得できる.RFID
システムの位相モ デルは一般に以下で表される.θ = (2π · 2R
λ + θ
t x+ θ
r x+ θ
t ag) mod 2π (1) R
はアンテナとタグの距離であり,一度の通信で信号 が通過する距離は2R
である.また,λ
は波長であり,θ
t x,θ
r x,θ
t agはそれぞれリーダーの送信回路,受信 回路並びにタグの反射において生じる位相回転である.一般にこれらの追加の位相回転は定数とみなすが,回 路遅延などによる曖昧性を含むため,物体が動かない 静的環境においても推定される複数値を交互に出力す るリーダーも多い.本論文ではこれに対処するため,
静的環境で観測された位相値を
100
秒ごとの時間ウィ ンドウで分割した場合の最頻観測位相値を中心とし,範囲を
[−π, π]
に補正した値を用いる.2. 3
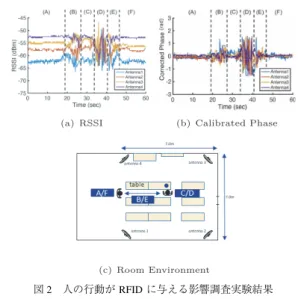
事 前 実 験図
2 (a) (b)
は,モノに貼付されたRFID
からの反射 波のRSSI
と位相が人の移動により変化する様子を,異なる方向に設置された四つのアンテナで捉えた結果
図2 人の行動がRFIDに与える影響調査実験結果 Fig. 2 Affect of human motion on RFID.
を示している.同図における
(A)
はモノを置いたテー ブルから離れた位置に人が立った状態,(B)
はテーブル に向かって歩いている状態,(C)
はテーブル脇に立っ た状態,(D)
はモノをテーブルからもち上げた状態,(E)
はモノをテーブルに戻して(A)
の位置に戻ってい る状態,(F)
は(A)
の位置に戻った状態を表す.(A)
か ら(F)
に対応する位置を図2 (c)
に示す.これらから,立った状態
(A)
,(C)
,(F)
はRSSI
及 び位相共に比較的変化が少なく,歩いている状態(B)
,(E)
にはそれと比べて大きな変化が,タグをもった状態(D)
では更に大きな変化がみられることがわかる.提 案手法では(D)
,(B) (E)
,及び(A) (C) (F)
の3
グルー プの区別が正しくつけられる方法を示し,状態変化の タイミングを推定しモノの推定に活用する.2. 4
手法の概要提案手法では,把握対象となるモノに貼付された
RFID
タグに対し,そのID
に対応するRSSI
と位相を 連続的に取得可能なパッシブRFID
タグリーダ,並び に異なる方向に設置された複数のアンテナを想定する.また,
3
次元距離センサー等を用い,非侵襲的かつプ ライバシーを侵害しない方法で同環境内の人の匿名位 置が追跡できるとする.このもとで,同環境内のモノ の位置を推定する.提案手法では,人によるモノの移動により生じる,
アンテナからタグへの電波伝搬経路変化を,主に位相 値の変化から検知する.なお,モノが移動されず,周 辺を人が移動し主に直接波を遮蔽することでも電波伝 搬経路は変化するが,これを区別するため,異なる方
図3 アンテナ(a)〜(d)の位相値分散の時間変化例 Fig. 3 Temporal change of phase variance at antennas (a)〜(d).
向に複数のアンテナを配置し,それぞれのアンテナで 観測される位相値の幅
1
秒の時間ウィンドウ内の分散 値を求め,全てのアンテナにおいて一定の変化が観測 されればモノが移動されたものとし,幾つかのアンテ ナだけで変化が観測されれば人の移動による位相変化 と判断する.これは,人体では全てのアンテナからの 電波伝搬経路を同時に遮蔽することは困難であるため,一部のアンテナで有意な変化が観測されなければ,モ ノの移動による位相変化ではないと判断できることに よる.図
3
は4
アンテナの位相変化例であり,モノの 移動状態(非静止状態,すなわちモノが使われている 状態)を赤いフレームで示している.アンテナ(a)
だ けでは非静止状態を静止状態と区別することは容易で ないが,全てのアンテナでの変化が観測される時間帯 は赤いフレーム内だけであることがわかる.この位相変化により検知された,
i
回目のモノの利 用の開始時刻をts
i,終了時刻をte
iで表す.また,時 刻t
における空間内の全ての人の位置の集合をP ( t )
で表す.あるモノに対し,ts
iが検知されたときのモ ノの位置はわかっていないとする.その後te
iが検知 されると,P(te
i)
の各位置(すなわち人がモノを置い たと想定される位置)がそのモノの位置候補となる.| P ( te
i)| = 1
(空間に一人しかいない場合)であれば,位置は一意に決定される.そこで,
| P ( te
i)| > 1
であ る場合を考える.ts
i+1 が検知されるとP(ts
i+1)
が取 得でき,P(te
i) ∩ P(ts
i+1)
に含まれる位置が得られる.システムがモノの非移動状態を継続的に検知できてい るという前提で,
i
回目の利用終了とi + 1
回目の利用 開始は同じ位置であることから(注1),この集合に含ま(注1):多少の位置誤差を許容するため,50cm程度以内の距離にある二 つの人の位置は同一であるとみなす.
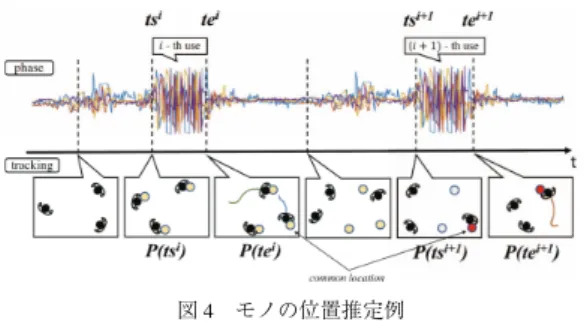
図4 モノの位置推定例 Fig. 4 Example localization of objects.
れる位置のいずれかがモノの位置となる.この位置集 合に対応する人々の軌跡を追跡し,時刻
te
i における それらの人々の位置集合がi + 1
回目の利用後のモノ の位置候補となる.これを繰り返せばいつかモノの位 置が一意に決定される.図
4
に例を示す.時刻ts
i に対するP(ts
i)
は黄円で 示している.時刻P(te
i)
がi
回目の利用後の候補位置 集合であり,P ( ts
i+1)
ではP ( te
i)
との共通位置は赤円 で示す一つだけである.この人物をトラッキングし,時刻
te
i+1における位置をモノの位置と推定する.モノの属性判定は,タグ
T
i が使われた平均時間use_time(T
i)
,タグの利用回数use_count(T
i)
,長期間 の相互位置関係sim_loc ( T
i, T
j)
,並びに利用された位 置の類似性use_loc ( T
i, A
j)
,をもつ特徴ベクトルを用 い,ユークリッド距離に基づくk
平均法を適用する.同一クラスターのモノは同じ属性(カップやペンなど)
であるとし,クラスター内のあるモノの属性が(例え ば人によるラベリングで)わかれば他のモノの属性も 自動で判断できる.
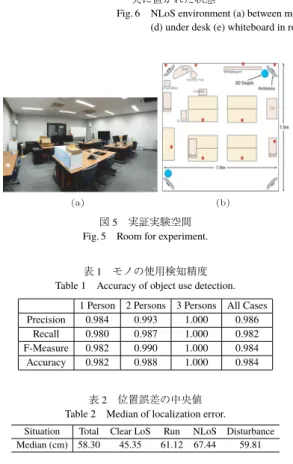
2. 5
実 証 実 験実験空間にタグを多数配置し,アンテナを設置した 上で位相検知によるモノの検知実験を実施した.周波
数は
916.8MHz
に固定し,リーダーに接続された四つのアンテナが時分割で動作する.また,アンテナの通 信範囲はおおよそ
10m
であり,偏波面は右旋円偏波で ある.これらの測定機器を,図5 (a)
のように一人の 居住者が実験的に活動する約49m
2の模擬オフィス環 境に設置した.設置レイアウトを図5 (b)
に示す.ア ンテナは部屋の四隅に中央に向けて配置し,同図の赤 印10
箇所に固定タグを,青印2
箇所に人物トラッキ ング用深度センサーを設置した.このもとで,1
人の 居住者がオフィスで活動する4
日間のデータを取得し た.実験期間中に全てのアンテナでタグから取得され たRFID
システムによる通信の総サンプル数は約3
千図6 実験空間におけるNLoS環境の例(a)ディスプレイとパーティションに囲まれた場 所(b)棚の中(c)金属製キャビネットの中(d)机の下(e)ホワイトボードが部屋の中 央に置かれた状態
Fig. 6 NLoS environment (a) between monitor and partition (b) inside shelf (c) metal cabinet (d) under desk (e) whiteboard in room.
図5 実証実験空間 Fig. 5 Room for experiment.
表1 モノの使用検知精度 Table 1 Accuracy of object use detection.
1 Person 2 Persons 3 Persons All Cases
Precision 0.984 0.993 1.000 0.986
Recall 0.980 0.987 1.000 0.982
F-Measure 0.982 0.990 1.000 0.984
Accuracy 0.982 0.988 1.000 0.984
表2 位置誤差の中央値 Table 2 Median of localization error.
Situation Total Clear LoS Run NLoS Disturbance Median (cm) 58.30 45.35 61.12 67.44 59.81
万(
30,965,800
)であった.モノの使用検知に関して は,実験期間中にカメラによって撮影された4
日間の 動画像データから,人がどのモノをいつ使っていたか の真値を毎秒生成し,それをもとに使用検知精度の評 価を行った.これに対し,表
1
にモノの使用検知の適合率(pre- cision
),再現率(recall
),F
値(F-measure
)及び精度(
accuracy
)を示す.以下,モノの使用を陽性とし,T P
,T N
,F P
,F N
をそれぞれ真陽性,真陰性,偽陽性,及 び偽陰性のサンプル数としたとき,適合率はT P+F PT P , 再現率はT PT P+F N,F
値はそれらの調和平均,精度はT P+T N
T P+T N+F P+F N で定義される.精度は
98.4%
であり,高精度で検出できたことを示している.また,これを
用いた位置推定を行った結果の位置誤差の中央値を 表
2
に示す.特に図6
に示すような厳しい見通し外環 境(NLoS
環境)においても約67cm
であり,全体で は58cm
とモノの管理にには十分な精度を達成できて いる.最後に,
10
種類のモノ(ペットボトル,本,ゴミ 箱,付近,ハンガー,カップ,ペン,スリッパ,貴重 品,うちわ,椅子)に対する属性判別精度を測定した 結果,全体では84.2%
の精度であった.なお,椅子の 判定精度が41.6%
と低かったが,これは椅子同士は位 置類似度が低いため,同じモノであると判定するのが 難しかったことによる.椅子を除外した9
種類で実験 した結果,精度は96.5%
に達している.3.
スマートビルディングに向けた空調機器 の位置同定3. 1
背 景電力使用のピークシフトや居住者快適性の向上に向 け,業務用空調機器の電力効率化とともにネットワー ク化が進んでおり,スマートビルディングや
BEMS
(
Building Energy Management System
)の普及を背景 に,今後の一層の導入増が予想される.人の温熱感推 定や温湿度の空間網羅的センシング情報に基づき,そ ういった機器をネットワークで詳細に制御すること で,電力と快適性の両立などの実現も期待できる.例 えば,ある部屋の空調の設定温度を下げる,といった 制御をネットワーク越しに行うことができる.そういった制御を実現するためには,空調機器の ネットワークアドレスとその物理的な設置位置の対応 関係が把握できている必要がある.一般にネットワー ク上のアドレスは起動時に自動的に設定されるため,
設置位置と紐付けるためには,機器を
1
台ずつ手動 で起動し,自動的に設定される機器のネットワークア ドレスと,起動させた機器を対応付けし,レイアウト図にネットワークアドレスを反映させる作業が必要 になる.しかし多数の空調機器に対しこの作業を一つ ずつ実施することは,人員及び時間の観点から大きな オーバヘッドとなる.特に,空調機器などは内装工事 のフェーズで導入されることが多く,作業日程が過密 となる段階での作業はなるべく省力化したいといった ニーズは強い.現実空間における位置の特定機能をも たない設備機器のスマート化は重要課題であり,特に 空調機器といった我々の生活空間に直接関連する機器 をサイバー空間に取り込み,人やモノの情報(在室状 況や人流,パーティションの位置など)を把握したう えで,現実空間の状況に基づいて空調制御を行うこと は省エネルギー並びに快適性の両立を図るうえで極め て重要である.
本研究では,
BLE
(Bluetooth Low Energy
)と制御 用有線ネットワークが内蔵されたIoT
型の空調機器を 前提とし,BLE
間でアドバタイズパケットを交換し,観測した電波強度をもとに空調機器間のおおよその近 接関係を把握するとともに,フロアレイアウトを解析 し,空調配置場所と上記で得られた近接関係のマッチ ングを試みることで,空調位置の自動同定を行う方法 論を提案している
[12]
.3. 2
手法の概要最近では
3
次元空間理解が進んでおり,空間のCAD
データや空間スキャンデータをもとに3
次元空間をモ デル化し,VR
やAR
,行動推定や行動シミュレーショ ン,家電制御,ビル設備管理などに活用する事例が増 えている.提案手法では,こういった空間モデリング が既になされているという前提で,筆者の研究グルー プが[13]
において提案した手法を活用する.まず,位置同定を行う現場の空間解析に基づき,空 調機器の設置位置並びに天井を構成する機器や部材
(
HVAC
(Heating, Ventilation, and Air Conditioning
),H
鋼,ダクト,パイプなど)の位置をCAD
データ等から 入手するとともに,それらをモデルパラメータとする 天井電波伝搬モデルを用いて,対象空間における空調 機器の設置位置間の電波伝搬推定を実施しておく.こ れにより,空調位置(これを位置ID
とよぶ)間の推定RSSI
を辺の重み,位置ID
を頂点とした「電波伝搬推 定グラフ」G
Eを得る.また,空調機器に内蔵されたBLE
モジュールはシングルホップで到達可能な近隣モ ジュールのアドバタイズからRSSI
を収集し,クラウ ドサーバーに送信する.クラウドサーバーはこれを集 約し,BLE
間のトポロジー情報を構築する.BLE
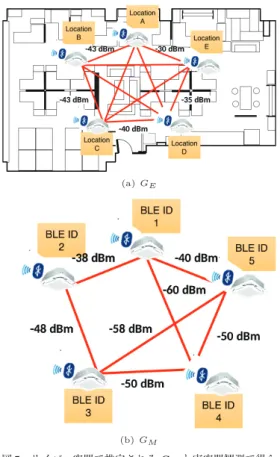
トポ図7 サイバー空間で推定されるGEと実空間観測で得ら れるGM
Fig. 7 GEin cyberspace andGMin physical space.
ロジー情報は最ゆう
RSSI
を辺の重み,頂点をBLE
のID
(BLE ID
とよぶ)としてもつ「観測グラフ」G
Mが 得られる.これらに対し,G
M のG
Eへの最ゆうマッ ピングを得ることで,BLE ID
をフロアレイアウト上 の位置ID
にマッピングし,空調機器のフロア位置へ の対応を得る.このためにはまず電波伝搬推定グラフ
G
Eを構築す るための電波伝搬推定モデルが必要となる.図8 (a)
及び図
8 (b)
は実証実験を行ったビルの天井裏H
鋼(梁)及び
HVAC
の写真である.天井裏環境はこういった機 器や部材が張り巡らされており,電波伝搬シミュレー ションは容易でない.そこで本手法では,幾つかの現 場において収集したデータから電波伝搬モデルを回帰 分析により生成する方法を採用している.自由空間伝搬損失に基づけば,電力は送信機と受信 機の距離の
2
乗に比例して減衰する.しかし天井環境 は多くの場合0.5m
から1.5m
程度の空間であり,前述 のような部材やHVAC
が配置されている.そのよう図8 天井裏のH鋼とHVAC機器 Fig. 8 H-Steel and HVAC above ceiling.
な環境においては見通し距離だけでなく,それらの障 害物の数や大きさが伝搬に大きな影響を与えるため,
既存の伝搬モデルを適用することは困難であると考え る.これに対し,提案手法で特に電波伝搬に影響が大 きいと想定される鉄鋼製梁(
H
鋼)あるいはサイズの 大きいHVAC
機器(空調機器ユニット並びに換気ユ ニットの両方)に着目し,2
点間の距離(distance
),見 通し直線上のH
鋼の数(#beam
)並びにHVAC
機器の数(
#machine
)をパラメータとした回帰による天井電波伝搬モデル作成を試みる.
まず,比較のため最小
2
乗誤差(OLS
)に基づく多 項式回帰によりdistance
のみを説明変数とした回帰を 行う.多項式回帰式はy(w, ˆ x) = w
0+ w
1x
1+ . . . + w
px
p(2)
で表され,
x
は説明変数,y ˆ
は目的変数,w
は回帰係 数である.損失関数はmin
w|| X w − y ||
22(3)
で表され,
y
はRSSI
,X
は距離の多項式d, d
2, . . . , d
n を割り当てる.これに対し,本手法で提案する天井電波伝搬モデル は,三つの特徴量
[distance, #beam, #machine]
を説明 変数とし,それらの多項式の和(すなわち多変数多項 式)を用いた以下のリッジ回帰にて求める.リッジ回 帰は線形回帰にL2
ノルムをペナルティ項として加え たものである.min
w|| X w − y ||
22+ α||w ||
22(4) α
の値が大きいほどペナルティは大きくなり,係数の 影響が抑制される.その結果,モデルの複雑性が制 御され,過学習を抑止する効果がある(本論文では表3 回帰モデル評価 Table 3 Evaluation of regression models.
特徴量 回帰モデル 次元 10分割交差検証 RMSE [dB]
全データセット RMSE [dB]
distance OLS
1 5.304 5.253
2 5.220 5.154
3 5.226 5.154
4 5.195 5.117
distance,
#beam,
#machine
Ridge:α=10
1 5.059 5.004
2 4.953 4.830
3 4.900 4.731
4 4.832 4.623
α = 10
としている).なお,回帰式は各変数の多項式 全体が含まれる.例えば最大次元を2
としたときに は,1, d, #beam, #machine, d
2, (#beam)
2, (#machine)
2, d · #beam, d · #machine
及び#beam · #machine
が項と なる.線形回帰並びにリッジ回帰のいずれも次元を1
から4
それぞれにおいて,各特徴量を正規化した上 で回帰分析を行っている.これらのモデルを全データ(100% data set)
を用いた回帰とテストをした場合の平 均2
乗平方根誤差(RMSE
)[dB]
並びに10
分割交差 検証で得られた10
個のRMSE
の平均値で評価した結 果を表3
に示す.基本的には次元数が上がると
RMSE
は減少してお り,交差検証が全データセット検証精度を上回ってい ることがわかる.結果より,三つの特徴量を用いる4
次元モデルが最もモデル精度が高いため,これを天井 電波伝搬モデルとし,以下のマッチングアルゴリズム を適用する.マッチングアルゴリズムについて述べる.観測グラ フを
G
M= ( N , m )
(N
はBLE ID
の集合,m
は通信したBLE
組の集合),電波伝搬推定グラフをG
E= ( L , e )
(L
は位置ID
の集合,e
は位置ID
組の集合)とする.図7
の例において,L = {A, B,C, D, E }
,e = L × L
であり,前述の電波伝搬モデルを用いてこれらの辺に対応する
RSSI
を推定する.また,観測グラフでは,一部のBLE
間は通信が到達しない可能性もあるため,一般には完全 グラフとはならない.この例ではN = {1, 2, 3, 4, 5}
で ありm = {(1, 2), (1, 4), (1, 5), (2, 3), (3, 4), (3, 5), (4, 5)}
で ある.これに対し,各BLE ID j
のリンクのみを取り出 したサブグラフG
M( j ) = ( N
j, m
j)
と,各位置ID v
のリ ンクのみを取り出したG
E(v) = ( L
v, e
v)
を考える.例え ば,BLE ID 1
と位置ID A
に対し,G
M(1) = (N
1, m
1)
,N
1= {1, 2, 4, 5}, m
1= {(1, 2), (1, 4), (1, 5)}
,G
E(A) = (L
A, e
A)
,L
A= L
,e
A= {(A, B), (A, C), ( A, D), (A, E)}
である.これに対し,マッチング
F : N
j→ L
vは,マッチングによる
2
辺のRSSI
差を誤差としたときの図9 実証実験空間のレイアウト Fig. 9 Room layout.
平均
2
乗和誤差が最小となるものとし,そのゆう度 はその誤差が小さいほど大きい値となるように設定す る.これを全てのBLE ID
と位置ID
の組に対し計算 することで,ゆう度行列A
N×Lを得ることができ,そ こからゆう度最大となる一対一対応M : N → L
を発 見する.3. 3
性 能 評 価大阪府にあるオフィスビルにおいて,図
9
に示す13
台の空調機器に対応するよう,天井裏位置に13
台のBLE
ノードを設置し,それらをイーサーネットでゲー トウェイに接続した.このもとで,BLE
ノードが相互 に観測したBLE
アドバタイズをゲートウェイに収集 する実験を実施した.収集は1
週間実施し,2.4GHz
帯トラヒックが少ない夜間並びに週末に収集したデー タの平均値をRSSI
とした.得られた提案手法を適用 して得られたゆう度行列と,文献[14]
の手法を補助的 に適用した結果を突合してゆう度の曖昧性を可能な限 り排除し,矛盾ない最大ゆう度の一対一対応を得た.その結果,
2
箇所については,ゆう度が近似しすぎる ために自動同定は困難であったものの,11
箇所のマッ チングは正しく行われ,全体として大幅な管理コスト 削減が期待できる.4.
スマートセンシングデータを処理する超 知性ネットワーク技術4. 1
超知性ネットワークに求められる役割 サイバーフィジカルシステムやSociety5.0
のような実世界指向のコンピューティングでは,スマートセン シングにより観測した現実空間のデータを
AI
によって 解析し,人間社会へフィードバックすることを目標と している.5G
の要求条件の一つであるMachine Type Communications
(Massive IoT
)では,1m
2あたり1
台 のIoT
機器が想定されているが,動画像やLiDAR
に よる人やモノの存在や位置情報,スマートホームや個 人のバイタルセンシングから生成されるパーソナルヘ ルスや生活管理情報,スマートビルディングから計測 される膨大なエネルギーデータや空調照明機器の状態 データなどを考慮すれば,スマートセンシングにより 理解されるヒト・モノ・環境やそれらに付随する情報量 はIoT
機器数以上に増大し,様々な地点からサイバー 空間に取り込まれていくと想定される.理想的には,スマートセンシングによりあらゆる実世界事象をサイ バー空間にリアルタイムで取り込むことができれば,
実空間を対象としたリアルタイム事象予測や
What-if
解析などが可能になる.この延長上にデジタルツイン やバーチャルシティといった概念が存在する.そういったサイバー空間を実現するためには,多数 の地点から様々なデバイスやセンサーにより取り込ま れるデータを誰がどこでどのように処理して活用する かを設計する必要がある.これに対し,近年のエッジ デバイスの普及と今後の増大,並びにクラウド処理や 通信量の限界を鑑みれば,システムの分散化は自然な ソリューションとみなせる.近い将来の
IoT
デバイス やエンドシステムは計算資源やAI
機能を有したエッ ジコンピューティングデバイスとなる.したがって,個々のデバイスやその周辺環境から生成されるセンシ ングデータの権利関係やプライバシー,及びデバイス の計算資源やネットワーク容量等を意識しながらそれ らを緩やかに連携させ,より公共の利益に資する広範 囲で高精度な
AI
を構築する技術が望まれる.分散
AI
技術をベースとしたサイバー空間が実現で きれば,現実社会の事象を理解・解析し,そのフィード バックが社会に与える影響を計算可能なプラットホー ムが実現され,それを活用する新時代の実世界アプリ ケーションが生まれると期待される.以下では分散AI
技術をそういったアプリケーション実現のための重要 技術とみなして技術動向を俯瞰する.4. 2
超知性ネットワークを支える分散AI
一般に
AI
の学習,推論,あるいはその両方を計算資 源の劣るエッジデバイスで行うことをエッジAI
ある いはエッジインテリジェンスとよぶ[15]
.ガートナーが
2019
年に発表したトレンド予測によれば,2023
年 までに20
倍以上のスマートデバイスがエッジデバイス としてIT
システムに組み込まれるとしており[16]
,同 年のハイプサイクルではエッジAI
が過度の期待期に位 置付けられている.産業界では,エッジAI
という用語 は主にAI
実行のためのハードウェアあるいはAI
の一 部をエッジデバイスで実行するためのMicrosoft Azure
や
Amazon AWS
のようなプラットホームの観点で用いられることが多い.近年は深層学習用
ASIC
が多く 発表されており,Huawei
のAscend 910
やIntel
が買 収したHabana Lab.
の推論/
学習用チップGoya/Gaudi
などが知られている.深層学習の訓練(モデル更新)や推論を分散環境で どのように実行するかは従来より研究がなされてきて おり
[17]
,2017
年にはFederated Learn- ing
の概念が発表されて注目を集めた[18]
.Federated
Learning
では,モバイルデバイスなどのデータの保有者,あるいはそこに近い場所で,自身が有するローカ ルデータのみから学習を実施し,その結果得られるモ デルパラメータ更新をクラウドサーバーに送信する.
サーバー側では得られた複数のデバイスからの更新を 統合してグローバルモデルを学習させる方法であり,
各デバイスがデータを開示することなく,グローバル モデル学習の実行を実現する分散学習手法である.例 えば家庭における行動推定のためのセンシングデータ はプライバシー保護の観点から家庭外で処理されるこ とは望ましくない.一方で,学習により得られた知識 を複数家庭で共有すれば,全体精度向上や公共の利益 につながる.したがって,このような手法はプライバ シーセンシティブなセンサーデータの活用法として期 待される.
Federated Learning
で性能評価基準として 言及しているFederated SDG
(FedSDG
)では,各クラ イアントは割り当てられた全ローカルデータを用いて 損失関数勾配を計算しモデル更新を行い,それを統合 する.一方,提案されているFederated Ave
(FedAve
) ではモデルパラメータ更新に工夫をしており,ローカ ルデータのモデル更新において,ローカルミニバッチ サイズB
,並びに学習回数E
を1
以上とし,繰り返し 学習を実施する.これにより,(i)
全体モデル精度が少 ないインタラクションで向上させられること,及び(ii)
全てのクライアントが学習に参加しなくてもインタラ クション回数に大きく影響しないこと,を示している.良く知られた
Federated Learning
の応用事例とし てモバイルデバイスの入力予測の協調的学習がある(
Gboard
でこの技術を活用している).一部 の学習デバイスが間欠的に多様なデータで学習しても グローバルモデルの精度向上が可能である点から,例 えば高度交通システムにおけるV2V
協調学習,スマー トホームにおける行動解析,スマートビルディングに おける学習ベースのエネルギー削減など,類似の学習 を広範囲にわたる組織や自治体,移動体や建造物等で 個別に行うようなスマートシティアプリケーションの 実現において特に期待される技術である.また
Federated Learning
において,モデル圧縮を行う手法
AutoML [19]
や,モデル更新頻度を調整する手法,デバイス選択をネットワーク状態に合わせて最 適化する手法なども提案されており,例えば
[20]
で はデバイスのネットワーク状態に応じて,なるべく多 くのデバイスに更新作業を依頼し,通信制約下でもモ デル精度を早期に向上させることを目指している.ま た,[21]
において,[18]
のFederated Learning
を多数のデバイスに展開する際に 考慮すべき実課題について指摘している.例えば,時 間帯など様々な要因で変化するデバイスの可用性や,信頼性の低いデバイスによる通信切断や実行中断,デ バイスの計算資源やストレージ制約などであり,それ らの解決方法について述べている.そういった議論は 最新の記事である
[17]
等でも行われている.また,エッジデバイスの
AI
化が進めば,それらが 自律的に連携してより多くの計算資源を提供しデータ 活用を高度化するメッシュAI
に移行するともいわれ ている.例えばエッジインテリジェンスを搭載する自 動運転車両が連携すれば各車両にとって最適な走行計 画をリアルタイムに決定でき,マルチレーンの走行を スムーズにできる可能性もある.[22]
ではEdge Mesh
とよばれるパラダイムを2017
年に提案しており,意 思決定のためのタスク管理とタスク割り当てをエッジ デバイス間で実現するフレームワークを設計してい る.また,筆者の研究グループでは環境発電動作を前 提とした小型デバイスを連携させてセンサーメッシュ ネットワークを構成し,そのネットワーク内で畳み込 みニューラルネットワークをニューロンレベルで分 割実行し省電力学習と推定を実現するMicroDeep [23]
や,複数のデバイスからのストリームプロセシングを 分散実行するプラットホーム
EdgeCEP [24]
を提案し ている.5.
む す び本論文では,人間中心のセンシング・
AI
解析・フィー ドバックを行うことで社会課題の解決を目指すSoci-
ety5.0
の概念に基づき,実世界アプリケーションを実現するためのスマートセンシングに関するプロジェク トについて述べた.特に,人とモノの存在や状態をサ イバー空間に取り入れて活用するための方法論の重要 性を述べ,それらに関する技術紹介を行っている.ま た,多地点から得られる大量の分散センシングデータ を集約・解析してして活用する超知性ネットワーク技 術に求められる役割を議論し,それを支える分散
AI
技術の動向について述べた.近年ではドローン,ロボット,自動運転車両など移 動体エッジデバイスの高性能化や高度化が著しく,デ バイスが有する計算能力やストレージ,通信容量も格 段に向上しつつある.プライバシーやデータホルダー の関係を意識しながら,それらの資源を活用したエッ ジ
AI
を協調させ,スマートセンシングと相互連携し ながらSociety5.0
に資する実世界アプリケーションを 分散環境で実現していくことが望まれる.筆者もその 実現に向けた技術開発に引き続き従事していきたい.謝辞 本研究成果は,国立研究開発法人情報通信研 究機構(
NICT
)の委託研究(課題番号191
)により得 られたものです.また,本論文で紹介した事例研究は,大阪大学大学院情報科学研究科モバイルコンピュー ティング講座並びに企業との協同により実施されたも のです.本論文の執筆にあたり関係する全ての共同研 究者の皆様に感謝します.
文 献
[1] 大阪大学,ライフデザイン・イノベーション研究拠点.
http://www.ids.osaka-u.ac.jp/ildi/
[2] 山口弘純,安本慶一,“エッジコンピューティング環境にお ける知的分散データ処理の実現,”信学論(B),vol.J101-B, no.5, pp.298–309, May 2018.
[3] D. Ye, R. Yu, M. Pan, and Z. Han, “Federated learning in vehicular edge computing: A selective model aggregation approach,” IEEE Access, vol.8, pp.23920–23935, 2020.
[4] T. Wei and X. Zhang, “Gyro in the air: tracking 3D orientation of batteryless internet of things,” GetMobile: Mobile Computing and Communications, vol.21, pp.35–38, May 2017.
[5] M. Ougida, H. Yamaguchi, and T. Higashino, “Trajectory-assisted robust rfid-tagged object tracking and recognition in room envi- ronment,” Proc. 23rd ACM International Conference on Model- ing, Analysis and Simulation of Wireless and Mobile Systems (MSWiM2020), pp.1–5, 2020.
[6] 扇田幹己,山口弘純,東野輝夫,“人間行動を活用したrfidに
よるモノの位置と種別推定,”情報処理学会第27回マルチ メディア通信と分散処理ワークショップ論文集,pp.28–38, Nov. 2019.
[7] F. Manzoor, Y. Huang, and K. Menzel, “Passive rfid-based in- door positioning system, an algorithmic approach,” 2010 IEEE International Conference on RFID-Technology and Applications, pp.112–117, 2010.
[8] J. Wang and D. Katabi, “Dude, where’s my card?: Rfid position- ing that works with multipath and non-line of sight,” SIGCOMM Comput. Commun. Rev., vol.43, no.4, pp.51–62, Aug. 2013.
http://doi.acm.org/10.1145/2534169.2486029
[9] Y. Zhang, Y. Ma, X. Miao, S. Zhang, and B. Wang, “Multipath mitigation algorithm for multifrequency-based ranging via convex relaxation in passive uhf rfid,” IEEE Internet of Things Journal, vol.6, no.1, pp.744–752, 2019.
[10] C. Duan, X. Rao, L. Yang, and Y. Liu, “Fusing rfid and computer vision for fine-grained object tracking,” IEEE INFOCOM 2017 - IEEE Conference on Computer Communications, pp.1–9, 2017.
[11] E. Global, “EPC Radio-Frequency Identity Protocols Generation- 2: UHF RFID Specification for RFID Air Interface – Protocol for Communications at 860 MHz – 960 MHz, Version 2.0.1 Ratified”.
https://www.gs1.org/sites/default/files/docs/epc/Gen2_Protocol_
Standard.pdf (参照2020-09-22).
[12] C. Chen, N. Kitbutrawat, S. Kajita, H. Yamaguchi, and T.
Higashino, “Modeling ble propagation above the ceiling for smart hvac systems,” 2019 15th International Conference on Intelligent Environments (IE), pp.68–71, 2019.
[13] Y. Noh, H. Yamaguchi, and U. Lee, “Infrastructure-free collabora- tive indoor positioning scheme for time-critical team operations,”
IEEE Trans. Syst., Man, Cybern.: Systems, vol.48, no.3, pp.418–
432, 2018.
[14] N. Kitbutrawat, C. Chen, S. Kajita, H. Yamaguchi, and T.
Higashino, “Localization of heating, ventilation, and air condition- ing by walking in smart building,” Sensors and Materials, vol.32, pp.59–78, Jan. 2020.
[15] Z. Zhou, X. Chen, E. Li, L. Zeng, K. Luo, and J. Zhang, “Edge intelligence: Paving the last mile of artificial intelligence with edge computing,” Proc. of the IEEE, vol.107, no.8, pp.1738–1762, 2019.
[16] Gartner Inc., Top 10 Strategic Technology Trends for 2020.
https://www.gartner.com/en/publications/top-tech-trends-2020 [17] T. Li, A.K. Sahu, A. Talwalkar, and V. Smith, “Federated learn-
ing: Challenges, methods, and future directions,” IEEE Signal Processing Magazine, vol.37, no.3, pp.50–60, 2020.
[18] B. McMahan, E. Moore, D. Ramage, S. Hampson, and B.A.
y Arcas, “Communication-efficient learning of deep networks from decentralized data,” Proc. of the 20th International Conference on Artificial Intelligence and Statistics (AISTATS2017), pp.1273–
1282, 2017.
[19] Y. He, J. Lin, Z. Liu, H. Wang, L.-J. Li, and S. Han, “AMC:
AutoML for model compression and acceleration on mobile de- vices,” The European Conference on Computer Vision (ECCV), pp.784–800, Sept. 2018.
[20] T. Nishio and R. Yonetani, “Client selection for federated learning with heterogeneous resources in mobile edge,” ICC 2019 - 2019
IEEE Int. Conf. Communications (ICC), pp.1–7, 2019.
[21] K. Bonawitz, H. Eichner, W. Grieskamp, D. Huba, A. Ingerman, V. Ivanov, C.M. Kiddon, J. Konečný, S. Mazzocchi, B. McMahan, T.V. Overveldt, D. Petrou, D. Ramage, and J. Roselander, “To- wards federated learning at scale: System design,” Proc. SysML Conference 2019, pp.1–15, 2019.
[22] Y. Sahni, J. Cao, S. Zhang, and L. Yang, “Edge mesh: A new paradigm to enable distributed intelligence in internet of things,”
IEEE Access, vol.5, pp.16441–16458, 2017.
[23] Y. Fukushima, D. Miura, T. Hamatani, H. Yamaguchi, and T.
Higashino, “Microdeep: In-network deep learning by micro- sensor coordination for pervasive computing,” 2018 IEEE Int.
Conf. Smart Computing (SMARTCOMP), pp.163–170, 2018.
[24] S. Choochotkaew, H. Yamaguchi, and T. Higashino, “A self- organized task distribution framework for module-based event stream processing,” IEEE Access, vol.7, pp.6493–6509, 2019.
(2020年7月21日受付,9月23日再受付,
11月10日早期公開)
山口 弘純 (正員)
平6大阪大学基礎工学部情報工学科卒.
平10同大学大学院基礎工学研究科博士後 期課程修了.平11同大学大学院基礎工学 研究科助手.平19より同大学大学院情報 科学研究科准教授.博士(工学).モバイル コンピューティングに関する研究に従事.
平30年度科学技術分野の文部科学大臣表彰(研究部門).情報 処理学会,ACM,IEEE各会員.