影情報を用いた物体表面の形状取得手法の検討
8
0
0
全文
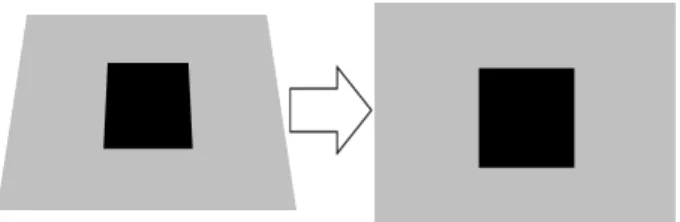
(2) Vol.2016-UBI-51 No.10 Vol.2016-ASD-5 No.10 2016/8/5. 情報処理学会研究報告 IPSJ SIG Technical Report. 2. 関連研究 現在,複数方向からカメラで取得した画像において,物 体が持つ輪郭の内側に物体が存在することを利用した視体 積交差法が存在する [4][5][6].また,異なる視点で撮影され た 2 次元画像による三角測量によって物体までの距離を求 めるステレオ法も存在する [7][8][9].しかし,視体積交差 法では輪郭を取得する際に物体が存在しない背景のみの画 像との比較を行う.そのため,物体と背景の色が近い場合. 図 1: 画像を合成して影を薄くするイメージ図. に輪郭を取得するのが困難である [10].また,輪郭を取得 する際に光源の位置により物体と影を明確に区分できない. 存在する.それに対し,影は点灯させる照明によって,別. 場合が存在するため,物体と影を分離する必要がある [11].. の位置に発生する.そのため,各々の照明を点灯させた際. また,両手法とも複数のカメラを固定して,各カメラごと. に作成される明度をそれぞれの画像で平均化することで,. の位置情報や画角などのパラメータを取得しなければなら. 物体部分の明度を大きく変化させることなく,影の存在領. ないことにより多くの時間と費用を必要とする.さらに複. 域の明度を薄くした画像が作成できる.照明ごとの画像を. 数視点から取得した画像の 3 次元オブジェクトの形状情報 を合成する際に齟齬が生じる. 本研究では様々な方向から照明を照らした際に取得した. 合成することによって影を薄くする流れを図 1 に示す.そ れぞれの照明を点灯させた際の画像から影の領域の明度を 低くする式を式 1 に示す.. 物体の影情報を取得する.そのため,複数方向から物体を 撮影する際と同じ情報を単一視点の画像から取得可能にな る [12].さらに,照明で物体を照らしてできた影情報から. Ig (x, y) =. n ∑. Im (x, y). k=1. 物体を推定することで,物体の色が背景の色と近い場合で も物体の情報を取得することが可能になる.. Ib (x, y) = Ig (x, y)/n. 3. 影情報を用いた 3 次元オブジェクト生成 手法. Ib : 影を薄めた画像. 3.1 概要. x : 画像の x 座標. Im : 取得画像. (1). Ig : 影の合成画像. n : 照明台数 y : 画像の y 座標. 影情報を用いた 3 次元オブジェクト生成手法は,物体を 照明で照らして得られる影から物体の形状を推定するため. 影を薄くした画像とそれぞれの照明を点灯させた際の画. に影情報を用いる.影情報を用いた 3 次元オブジェクト生. 像を比較することで影の領域を取得した 2 値化画像を作成. 成手法には 4 つの段階があり,画像取得,影位置認識,物. する.影を薄くした画像との比較から影の領域を抽出する. 体位置推定,オブジェクト生成の順に説明する.. 式を式 2 と式 3 に示す.. 3.2 画像取得 本研究では物体の周囲に配置した天井照明で物体を照ら. Id (x, y) = Ib (x, y) − Im (x, y). (2). し影を取得する.そのため,照明に囲まれている位置に配. {. 置した机の上に物体を設置する.カメラの向きを机上面の 中心に固定した状態で照明を 1 灯ずつ順次点灯させ,それ. Ires (x, y) =. ぞれの場合において物体を撮影する.それにより,照明の 台数と同数の画像を取得する.. 1(Id (x, y) > T ) 0(Id (x, y) <= T ). Ires : 2 値化画像 Ib : 影の合成画像. 3.3 影位置認識 取得画像における物体の影の位置を認識する.影の領域 は他の領域と比較した際,明度が低い.その比較した際に 生じた明度差を用いるため,影の明度を低くした画像との 比較を行う.それにより,影の領域を抽出する.点灯させ る照明に関わらず,全ての画像において物体は同じ位置に. c 2016 Information Processing Society of Japan ⃝. T : 閾値. (3). Id : 影の抽出画像 Im : 取得画像. x : 画像の x 座標 y : 画像の y 座標. 3 次元での位置情報が立体空間での計算時に必要となる. そのため,3 次元での位置情報として,机上面における影 の位置を取得する.そこで,カメラ画像から取得した影を 机上面における座標に変換する.カメラ画像における机の 四隅から頂点座標を取得して,変換を行うことによって机. 2.
(3) Vol.2016-UBI-51 No.10 Vol.2016-ASD-5 No.10 2016/8/5. 情報処理学会研究報告 IPSJ SIG Technical Report. C : 変換元画像. E :変換後画像. x : 画像の x 座標 y : 画像の y 座標. 3.4 物体位置推定 物体の生成には物体の底と影の情報を必要とする.しか 図 2: カメラ画像から机上面への座標変換. し,物体よりも手前にある照明を点灯させた場合は,影が. 上面における座標情報を取得する.使用した変換方法は遠 近法を用いた手法であり,2 次元座標系と 3 次元座標系間 の変換を行う.机上面における座標を取得することで机上 面の高さを 3 次元座標の高さの座標として取得することが でき,また机上面画像の縦の座標と横の座標がそれぞれ机 の奥行きと幅に対応付ける.カメラ画像の机画像から机上 面画像への画像変換の過程を図 2 に示し,画像変換の式を 式 4 と式 5 に示す.. 物体の裏に隠れてカメラ画像から取得できない.そのため, 物体よりも手前にある照明を点灯させた場合は影が存在す る可能性がある物体のシルエット部分を物体位置と推定す る.対して,物体よりも手前にある照明以外を点灯させた 場合は影が物体に遮られない.そのため,物体よりも手前 以外にある照明を点灯させた場合は物体の底位置のみを取 得すればよい.よって,手前側以外の照明を点灯させた際 にできた影に囲まれた位置を物体位置として推定する.そ れぞれの場合において影が発生する位置を割り出すため, 照明を点灯させた際にできる影の位置情報を合成する.影. u = (x ∗ a + y ∗ b + c)/(x ∗ g + y ∗ h + 1). v = (x ∗ d + y ∗ e + f )/(x ∗ g + y ∗ h + 1) u : 机上面の x 座標. (4). (5). の合成を行う式を式 8 に示す.. P (x, y) =. n ∏. $i (x, y). P : 影の合成画像. v : 机上面の y 座標. (8). i=1. i : 照明番号. a, b, c, d, e, f, g, h : 変換係数. n : 照明数. x : 画像の x 座標 y : 画像の y 座標. x : 画像の x 座標 y : 画像の y 座標. $ : 影部分の集合. また,雑音処理をかけることによって影の部分のみを正. 影を合成することによって,影が発生し得る位置を取得. 確に抽出する.雑音処理として,白色領域内に存在する雑. することができる.そして,影の発生し得る位置を認識す. 音を削除する膨張収縮処理,黒色領域内に存在するの雑音. ることにより,影に挟まれている部分を物体の位置として. を削除する収縮膨張処理をそれぞれ用いた.膨張収縮処理. 推定する.影の位置を合成した画像から物体位置の推定を. は膨張処理の後に収縮処理を行う雑音処理方法であり,収. 行う式を式 9 に示す.. 縮膨張処理は収縮処理の後に膨張処理を行う雑音処理方法 である.膨張処理の過程と収縮処理の過程を式 6 と 7 にそ れぞれ示す.. { C(x, y) =. 1(coordinates(x, y) is white) 0(coordinates(x, y) is black). + C(x, y − 1) + C(x, y) + C(x, y + 1). E(x, y) =. P : 影の合成画像. x : 画像の x 座標 y : 画像の y 座標. 式 9 により,影に挟まれていてなおかつ影ではない部分 を物体位置として抽出することができる.手前側の照明を. 1(D(x, y) > 0) 0(otherwise). {. O : 物体の推定画像 u, v : 変数. + C(x + 1, y − 1) + C(x + 1, y) + C(x + 1, y + 1). E(x, y) =. (9). u<v. D(x, y) = C(x − 1, y − 1) + C(x − 1, y) + C(x − 1, y + 1). {. 1 P (x, y) = 1 ∩P (x + u, y) = 0 O(x + u, y) = ∩P (x + v, y) = 1 0 (otherwise). (6). 点灯している場合は全ての照明,手前以外の照明を点灯し ている場合は手前以外の全ての照明を点灯している場合の 影を合成している.これにより,物体の手前から照明を点. 1(D(x, y) > 8) 0(otherwise). c 2016 Information Processing Society of Japan ⃝. (7). 灯している場合と手前以外から照明を点灯している両方の 場合において物体位置の推定を行うことが可能である.. 3.
(4) Vol.2016-UBI-51 No.10 Vol.2016-ASD-5 No.10 2016/8/5. 情報処理学会研究報告 IPSJ SIG Technical Report. 3.5 オブジェクト生成 画像の中には物体の影が存在している領域,物体の位置 が存在している領域,光が射している領域の 3 種類の領域 が存在している.何もない机上面は光が照射されていて, 影が存在している机上面と物体の底面は光が照射されてい ないことがそれぞれ確認できる.また,物体のシルエット が存在している位置は机上面を確認することができない. そのため,机上面座標に変換した影位置の画像と物体位置 画像を合成すると机上面における光が照射されていない可 能性がある位置を判別できる.そして,光が照射されてい ない可能性がある領域以外を光が照射されている領域と断 図 3: ボクセルの初期配置. 定する.それぞれの照明を点灯させた際の影画像と推定し た物体シルエット画像から机上面における確実に光が当 たっている位置を求める式を式 10 に示す.. Ri = $ i ∪ O. { Qi (x, y) =. 1(Ri (x, y) = 0) 0(Ri (x, y) = 1). Q : 光の接触領域. (10). R : 光の非接触領域. $ : 影部分の集合 O : 物体推定画像 i : 照明番号 x : 画像の x 座標 y : 画像の y 座標 図 4: ボクセルの表示判定 本手法は物体の存在しない領域を削っていくことで,オ ブジェクトの生成を行う.物体の 3 次元オブジェクトを生. dy = ly + (z/(z − vz )) ∗ (vy − ly ). 成するため,初期状態として机上面に最小単位となる一定. z = lz − dz. の大きさを持つ立方体を隙間無く配置する.この立方体を 本稿ではボクセルとする.机上面を基準としてボクセルを. d : 机上面 l : 照明. 敷き詰めた様子を図 3 に示す.照明とボクセルの座標か. v : ボクセル. ら,照明とボクセルの中心を結んだ光線を求める式を式 11 に,光線上に位置している座標を表す式を式 12 に示す.. (14). z : 机上から照明までの高さ. 接触位置を求める様子を図 4 に示す.その後,物体の底 面の高さにおいて光が当たっているか調べる.光線が机の 外側を通っている場合,もしくは光が照明から机上面まで. L = (lx − vx , ly − vy , lz − vz ). (11). 届いている場合は照明から机上面まで結んだ直線位置には 物体は存在しないためにボクセルを消去する.また,光線 と机上面の接触位置が影になっており光が通っていない場. P = (lx , ly , lz ) + k ∗ L. (12). 合にはボクセルを保持する.この処理を各照明ごとに繰り 返し,残ったボクセルの集合を生成オブジェクトとする.. L : 生成ベクトル P : ベクトル上の座標. 4. 実験. k : 媒介変数 l : 照明 v : ボクセル. 本手法を用いて作成した 3 次元オブジェクトの生成精. 式 12 におけるz座標が底面と同じ高さになる場合を光 線と机上面の接触位置とする.机の縦方向と横方向を表す. x,y 座標を求める式を式 13,式 14 にそれぞれ示す.. 度を検証することを目的として,実環境において実験を 行った.. 4.1 実験環境 照明が 9 灯存在する部屋で物体の形状取得を行った.実. dx = lx + (z/(z − vz )) ∗ (vx − lx ) c 2016 Information Processing Society of Japan ⃝. (13). 験に用いた環境における照明と物体との位置関係を図 5 に. 4.
(5) Vol.2016-UBI-51 No.10 Vol.2016-ASD-5 No.10 2016/8/5. 情報処理学会研究報告 IPSJ SIG Technical Report. 0.6m. 1.2m. (a) 立方体. (b) 円柱. 図 9: 画像を足し合わせて影を薄くした画像 0.6m 1.2m. 図 5: 照明と物体の位置関係. (a) 立方体. (b) 円柱. 図 10: カメラ画像から影を抽出した画像 図 6: 近景の実験風景. 図 7: 遠景の実験風景. (a) 立方体 (a) 立方体. (b) 円柱. (b) 円柱. 図 11: カメラ画像における影を机上面の位置に変換した画 像. 図 8: 照明 1 を点灯させた場合の取得画像 示す.本稿では形状推定を行う物体として,各辺 12cm の 立方体および高さ 10cm で直径 10cm の円柱を机の中心に 設置して形状推定を行った.物体生成の際に定義した一つ のボクセルの一辺の大きさは 0.1 cm である.また,ボク セルの正面は緑,背面は赤,左面は青,右面は黄,上面は 白,底面は黒の配色である.近景の実験風景を図 6 に,遠 景の実験風景を図 7 に示す.照明 1 を点灯させた際に取得. (a) 立方体. した立方体および円柱の画像を図 8 に示す.. 図 12: 推定した物体位置を示した画像. 4.2 実験結果 立方体および円柱におけるそれぞれの照明を一つ一つ点. (b) 円柱. 図 13 を足し合わせて机上面の光が当たらない位置を出し た画像を図 14 に示す.. 灯した際に取得した画像の画素値を平均した画像を図 9 に. 立方体に対して生成したオブジェクトの正面から見た画. 示す.照明 1 を点灯させた際における影の領域を 2 値化す. 像と斜め上から見た画像,真上から見た画像,横から見た. ることで抽出した画像を図 10 に,机上面における位置に. 画像を図 15 に示す.これらの画像から,生成されたオブ. 変換し雑音処理した画像を図 11 に示す.. ジェクトは立方体のような形と推定できる.また,円柱立. 手前側の照明を点灯させた際の物体位置を図 12 に示す. 物体の底があると推定した位置を図 13 に示す.図 12 と. c 2016 Information Processing Society of Japan ⃝. 方体に対して生成したオブジェクトの正面から見た画像と 斜め上から見た画像,真上から見た画像,横から見た画像. 5.
(6) Vol.2016-UBI-51 No.10 Vol.2016-ASD-5 No.10 2016/8/5. 情報処理学会研究報告 IPSJ SIG Technical Report. (a) 立方体. (b) 円柱. (b). (a). 図 13: 物体の底位置を示した画像. (c). (d). 図 16: 円柱の生成結果 (a) 立方体. (b) 円柱. 図 14: 光線が接触している位置を示した画像. (a). (b). 図 17: カメラに対しての箱の各面の位置 が 3.1 mm と最も小さく,上面が 19.2 mm と最も大きかっ た.表 2 より,円柱の各面に関する生成結果は底面を除く と前面が 4.7 mm と最も小さく,背面が 25.9 mm と最も大 きかった.また,誤差がなかった底面を除く 5 つの面の誤 差に関する立方体と円柱それぞれの累積分布関数を図 18. (d). (c). と図 19 にそれぞれ示す.. 図 15: 立方体の生成結果. 表 1: 立方体での誤差 面の位置. を図 16 に示す.. 平均誤差 (mm). 底面. 0. 上面. 19.2. 法で作成したオブジェクトとそれぞれの表面において離れ. 前面. 3.1. ている距離を算出する手法を取った.まず,生成目的であ. 背面. 6.3. るオブジェクトを生成オブジェクトと同位置に配置する.. 左面. 7.1. 次に,目的オブジェクトの表面から生成オブジェクトの表. 右面. 6.6. 評価方法として目的となるオブジェクトを作成し,本手. 面までの垂直距離を求めた.この垂直距離の大きさで生成 オブジェクトと目的オブジェクトの表面における位置の差 を算出する.6 つの方向ごとに垂直距離を算出する.箱の. 4.3 考察. 各面における位置を図 17 に示す.立方体と円柱それぞれ. 立方体に関して,表 1 より物体の上面における誤差が他. の面ごとの垂直距離の平均を表 1 と表 2 に示す.底面は. の面における誤差よりも大きかった.上面における誤差が. 基準として用いているため,誤差が存在していない.表 1. 19.2 mm と大きかった理由として,物体の上部にあるボク. より,立方体の各面に関する生成結果は底面を除くと前面. セルによってできるはずの影は物体に接触することがあげ. c 2016 Information Processing Society of Japan ⃝. 6.
(7) Vol.2016-UBI-51 No.10 Vol.2016-ASD-5 No.10 2016/8/5. 情報処理学会研究報告 IPSJ SIG Technical Report. 円柱に関して,表 2 より物体の背面における誤差が 25.9. 表 2: 円柱での誤差. mm 大きかった.これは底の推定を行った際に,誤差が生. 面の位置. 平均誤差 (mm). 底面. 0. 上面. 14.6. 円柱の底位置を俯瞰図で図 22 に示す.この誤推定により,. 前面. 4.7. 実際の円柱よりも作成した円柱は底面付近の背面が大きく. じていることが原因と考えられる.誤って推定されている. 背面. 25.9. 作成されている.右面と左面における誤差が大きい理由も. 左面. 14.7. 背面における誤差が生じた理由と同様に底面と推定した情. 右面. 13.3. 報が誤っていることが原因であると推測できる.また物体 の上部において生じた誤差が 14.6 mm と大きかった理由 は立方体の場合と同様で物体の上部に積み上げられている ボクセルが削除できなかったからと推測できる. また,今回の実験で配置したように白色の机上面に白色 の円柱という背景と同系統の色をした物体をおいている場 合,背景差分法を用いると物体のシルエットが取得できな い.しかし,本手法の場合では物体のシルエットの取得が 可能である.これは机上面に存在している物体のシルエッ トを背景との差分から取得しているわけではなく,物体の 周囲に存在している影を取得することで間接的に物体のシ. 図 18: 立方体を生成した際の誤差に対する累積分布関数. ルエットを取得しているためである.そのため,本手法に おいて影を取得するためには,机上面の色が白色系統の必 要があるが,物体の色には左右されないで物体のシルエッ トの推定が可能になる.それにより,物体に応じて環境を 変更させずとも環境を固定したままで物体を変更させるこ とが可能にだと考える.また,画像から立方体と円柱とい う両方の生成物体に関して,面の部分においての推定精度 より辺の部分においての推定精度が高いことが分かる.辺 部分の推定精度が面部分より高い理由として,物体の辺に 関しては影の輪郭である影線から取得することが可能であ る.しかし,物体の面に関しては影線と物体の辺を結んだ 領域よりも内側にあるという情報しか得ることができな. 図 19: 円柱を生成した際の誤差に対する累積分布関数. い.そのことから,立体の辺は影の輪郭である影線に対応 しているのに対して,立体の面は推定する際に対応するも. られる.そのため,物体の影ができる位置と一致する位置. のが存在しない.そのため,物体の面に関しての推定精度. に影が生じるボクセルが存在する.それにより,物体上部. が辺に関してよりも低くなっていると推測できる.これら. の面においては,物体が存在する可能性がある領域とする. のことから,物体の面に対応する情報を得ることにより物. ことからボクセルを削除することができない.物体が存在. 体の面を推定する際に精度を向上することが可能だと考え. する領域について横から確認したものを図 20 に示す.立. られる.. 方体生成において最終的に削除できていないボクセルの位 置を図 21 に示す.また,本手法では本来画像から取得す ることができない背面における誤差が 6.6 mm と小さい.. 5. 結論と今後の展望 本稿では,影情報を用いた 3 次元オブジェクト生成方法. その理由として,影から物体の背面の情報を取得できてい. の提案を行った.影情報を用いたオブジェクト生成では複. ること,さらに物体の底面を推定していることで影から読. 数のカメラを用いていた従来の手法と比較して,費用や準. み取ることができない物体の底面付近の情報を取得できて. 備の手間が少ない.また,従来の方法では物体と背景の方. いることがあげられる.また,物体の測面における誤差は. 法が近い場合,物体の情報を取得することができないが,. 図 15 の真上視点から,後ろに行くほど大きくなっている. その場合でも物体の情報を取得可能である.本手法では画. ことが分かる.これはカメラ画像で確認できる影から物体. 像取得,影位置認識,物体位置推定,オブジェクト生成の. の底面を推定しているため,取得不可能な後方にある影の. 4 つの段階がある.複数方向の照明で物体を照らし,それ. 範囲が大きいことが要因だと考えられる.. ぞれの場合で画像を取得する.取得した画像から影情報を. c 2016 Information Processing Society of Japan ⃝. 7.
(8) Vol.2016-UBI-51 No.10 Vol.2016-ASD-5 No.10 2016/8/5. 情報処理学会研究報告 IPSJ SIG Technical Report. かったことから,物体から反射した光を取得することで物 体の面が持つ形状を取得することが可能か検証する.ま た,物体情報の全体が取得できていない場合でも物体の辺 が連続していることから,影線も同様に連続していると考 えられる.そのため,取得できている影情報から取得でき ていない影情報を推定できないか検証し,物体生成の精度 を向上させる.また他の形状を持つ物体に対しても本手法 を実施し,有用性の検証を行いたい. 参考文献 図 20: 物体上部における誤差発生位置の横視点. 図 21: 立方体生成における誤差の発生位置. 図 22: 円柱における底面の推定位置の誤差 取得する.取得した影情報から物体の底位置,物体のシル エットが存在する位置を推定する.取得した影情報と物体 の底位置,物体のシルエットを用いることで物体の形状が 取得可能であることを確認した.本手法を用いて実際に立 方体と円柱の 3 次元オブジェクトを作成し,作成した 3 次 元オブジェクトの精度検証を実施した.その結果,立方体 においては上部において誤差が大きいことを確認し,その 理由について考察した.円柱においては物体の背面におい. [1]. Okada, M., Tarumi, H., Yoshimura, T., Moriya, K., and Sakai, T.:DigitalEE: A Support System for Collaborative Environmental Education Using Distributed Virtual Space, Systems and Computers in Japan, Vol. 33, No. 8, pp. 51–63(2002) [2] 伊藤雄一, 北村喜文, 河合道広, 岸野文郎:リアルタイム 3 次元形状モデリングとインタラクションのための双方 向ユーザインタフェース ActiveCube,情報処理,Vol.42, No.6, pp.1338∼1347(2001). [3] 宮田一乘, 高橋誠史, 黒田篤:GPU コンピューティングの 動向と将来像,芸術科学,Vol.4,No.1,pp.13∼19(2005) . [4] 豊浦正広, 飯山将晃, 角所考, 美濃導彦:視体積交差法にお ける時系列画像の統合による三次元復元形状の再現性の向 上,電子情報通信,Vol.88, No.8, pp.1549∼1563(2005) . [5] Iiyama, M., Kakusho, K. and Minoh, M.:3D Object Model Acquisition from Silhouettes, Kyoto University (2006) [6] 冨山仁博, 片山美和, 岩舘祐一, 今泉浩幸:視体積交差法 とステレオマッチング法を用いた多視点画像からの 3 次 元動オブジェクト生成手法,映像情報メディア,Vol.58, No.6, pp.797∼806(2004) [7] Sumi, Y., Kawai, Y., Yoshimi, T. and Tomita, F.:3D Object Recognition in Cluttered Environments by Segmentbased Stereo Vision , INTERNATIONAL JOURNAL OF COMPUTER VISION, Vol.46, No.1, pp.5-23(2002). [8] Iketani, A., Sato, T., Ikeda, S., Kanbara, M., Nakajima, N. and Yokoya, N.,:Video mosaicing for curved surface by 3D reconstruction using feature points, Proc, ICCV2005 (2005). [9] 中山大介, 中野淳史, 金子透, 三浦憲二郎, 久保高啓: ステ レオ視によるガラス水槽中物体の 3 次元計測のための観測 パラメータ取得,電子情報通信,Vol.84, No.12, pp.2684∼ 2689(2001). [10] Iwai, Y., Yagi, Y. and Yachida, M.:A System for 3D Motion and Position Estimation of Hand from Monocular Image Sequence, Vol.20, pp.809-814(199). [11] Toyoura, M., Iiyama, M., Kakusho, K. and Minoh, M.3D Shape Reconstruction with Random Pattern Backgrounds The 6th International Symposium of the Academic Center for Computing and Media Studies in Coorperation with International Multimedia Modeling Conference, pp.3-16(2008). [12] Sato, I., Okabe, T., Sato, Y. and Ikeuchi, K.:Using Extended Light Sources for Modeling Object Appearance under Varying Illumination, ICCV, pp.325-332(2005). て誤差が大きく,次いで上面,左面,右面の順に誤差が高 いことを確認した.また誤差が生じた理由を考察し、精度 向上する. 今後は今回の物体形状推定手法の精度向上を行いたい. そのための方法として,物体の面においての推定精度が低. c 2016 Information Processing Society of Japan ⃝. 8.
(9)
図

関連したドキュメント
全国の 研究者情報 各大学の.
Department of Chemistry and Chemical Engineering , Faculty of Engineering, Kanazawa University; Kanazawa-shi 920 Japan The SN reactions of t-alkyl alcohols with
Department of Chemistry and Chemical Engineering, Faculty of Engineering, Kanazawa University; Kanazawa-shi 920 Japan Calcium, strontium, and barium alkoxides reacted with primary
東京大学 大学院情報理工学系研究科 数理情報学専攻. [email protected]
情報理工学研究科 情報・通信工学専攻. 2012/7/12
* Department of Mathematical Science, School of Fundamental Science and Engineering, Waseda University, 3‐4‐1 Okubo, Shinjuku, Tokyo 169‐8555, Japan... \mathrm{e}
理工学部・情報理工学部・生命科学部・薬学部 AO 英語基準入学試験【4 月入学】 国際関係学部・グローバル教養学部・情報理工学部 AO
Functional limit theorem for intermittent
