招待論文
移動通信における干渉キャンセラの適用と発展
鈴木 博
†a)府川 和彦
††b)須山 聡
†††c)Application and Development of Interference Cancelers in Mobile Communications Hiroshi SUZUKI†a), Kazuhiko FUKAWA
††b), and Satoshi SUYAMA
†††c)
あらまし 移動通信における干渉キャンセラ技術ついて,その動向を概説する.また,幾つかの基本的な構成法 を理論的に導き,10 Gbpsフィールド伝送実験の結果,また将来への課題を示す.まず,符号間干渉と同一チャ
ネル干渉(CCI)を高速フェージング環境において除去できる非線形干渉キャンセラとして,RLS-MLSE構成の
干渉キャンセル等化器(ICE)を取りあげ,その特性について概説する.また,CCIキャンセラをMIMO-OFDM に適用した移動通信システムはユーザ数または伝送速度を大幅に増大できることを述べ,そのための高度な方法 について簡単に述べる.次に,信号検出を統計的信号処理として体系化する観点から,最ゆう規範と最大事後確 率規範を用いて幾つかの基本的な干渉キャンセラが導出できることを理論的に示す.最後にフィールド実験によ
り10 Gbps以上のMIMO-OFDM伝送を用いた移動通信システムの実現可能性を示す.また,第5世代セル
ラーにおける研究課題について簡単に述べる.
キーワード 移動通信,符号間干渉,同一チャネル干渉,等化器,干渉キャンセラ,RLS-MLSE,10 Gbps
1.
ま え が き近年,携帯電話と無線
LAN
を代表とする移動通信 はパーソナル通信手段として社会に深く浸透している.これらの移動通信では様々な技術を駆使して限られた 無線周波数帯域を最大限に利用し,高速・大容量シス テムを実現している.その周波数有効利用を制限する 基本要因として雑音と干渉が挙げられる.
無線通信は開かれた空間を媒体としているので有線 通信に比べて干渉が混入しやすい.しかしながら,携 帯電話においては専用周波数帯域を用いるので,干渉 としては同一システム内の無線信号のみを考慮すれば よいのでシステム内に閉じた議論ができる.本論文で
†電気通信大学,調布市
The University of Electro-Communications, 1–5–1 Chofu- gaoka, Chofu-shi, 182–8585 Japan
††東京工業大学,東京都
Tokyo Institute of Technology, 2–12–1 O-okayama, Meguro- ku, Tokyo, 152–8550 Japan
†††(株)NTTドコモ,横須賀市
NTT DOCOMO, INC., 3–6 Hikarinooka, Yokosuka-shi, 239–
8536 Japan
a) E-mail: [email protected] b) E-mail: [email protected] c) E-mail: [email protected]
DOI:10.14923/transcomj.2016SHI0011
は,セルラーコンセプト
[1]
を採用した携帯電話シス テムにおける干渉キャンセラについて述べる[2], [3]
. セルラー方式において,最初に干渉キャンセラを導入 したのは欧州における第2
世代(2G
,以下では“
世代”
をG
で表記)
システムGSM (global system for mo- bile communications)
であった.GSM
は約300 kHz
の無線帯域でGMSK
変調の伝送を行うが,Stockholm
中心部におけるフィールド実験の結果,伝搬における マルチパスディレースプレッドに起因する符号間干渉(intersymbol interference: ISI)
のため通常の検波器 では誤り率が0.1
程度となった[4], [5]
.音声伝送に必 要な10
−2以下を確保するためにはISI
をキャンセルす る等化器が必須であることが判明し,その研究が行わ れた[4], [6]
.日本においても,2G
のPDC (personal digital cellular)
への適用を念頭に適応等化器の基礎研 究が行われた[7], [8]
.PDC
は50 kHz
の帯域なので,ISI
の広がりよりも変動の速さへの対応が重視された.そのため,適応性能の優れた等化器が研究された.
セルラー方式の周波数利用効率の向上に,よりイン パクトのある干渉キャンセラとしては,セル周辺から くる同一チャネル干渉
(cochannel interference: CCI)
に対するCCI
キャンセラがある.干渉の少ないチャ ネルが多いほど,そのセルでユーザを増やすことができるからである.また,
CCI
キャンセラをセル内の通 信に用いれば一つのチャネルを複数のユーザに割り当 てることも可能になる.具体的なCCI
キャンセラと しては,フェージング対策に有効なアンテナダイバー シチの拡張ついて基礎研究が行われた.その方法は,(1)
ヌル制御,(2)
ダイバーシチと干渉抑圧の結合制 御,(3)
希望ユーザへのメインビーム制御,に分類さ れる[9]
.まず,
(1)
ヌル制御はアンテナへの到来角度広がり があると十分機能しないことが判明したが[10]
,その 機能は(2)
と(3)
にも包含されている.次に,(2)
ダイ バーシチ制御は,それまでSNR (signal to noise ra- tio)
を高める技術として扱われ最大比合成(maximal radio combining: MRC)
規範が知られていた[11]
.MRC
に は 干 渉 を キャン セ ル す る 機 能 が な い の で ,MMSE (minimum mean square error)
規範で制御 され,SINR (signal to interference and noise ratio)
を最大化するものが線形空間フィルタ,すなわち線形CCI
キャンセラ,として研究された.線形処理では性 能が十分でない場合,非線形CCI
キャンセラが検討 された.最後に,(3)
メインビーム制御はアンテナの セクタ方式を高度化したものと考えられる.4G
においてCCI
キャンセラは,高速化推進のための キーテクノロジーであるMIMO (multi-input multi-
output)
技術の基本要素として注目を浴びるようになった.このころから,干渉キャンセル技術は大きく 発展した.事前確率を一定として事後確率を最大化す る最ゆう
(maximum likelihood: ML)
規範だけでな く,事前確率の更新を含む事後確率を最大化する最大 事後確率(maximum a posteriori: MAP)
規範を適用 した高度な統計的信号処理も研究されるようになった.また,
4G
の変復調方式には広い帯域を有効利用で きるOFDM (orthogonal frequency division multi- plexing)
が研究された.この変調は,冗長性が増える がGI (guard interval)
を導入して,ISI
の影響を等化 器なしに抑圧できる.本 論 文 で は ,著 者 等 が 携 わって き た 研 究 内 容
[2], [3], [8], [12]
〜[40]
を中心にしてセルラー方式にお ける干渉キャンセル技術の概要を述べる.2.
では無 線用干渉キャンセラとして,適応等化器と非線形干 渉キャンセラの動作と性能の概要,研究の経緯を述べ る.3.
では統計的信号処理の観点から,ML
とMAP
規範を用いて,幾つかの干渉キャンセラを導出し,既 に知られているものとの関係を明らかにし体系化を図る.
4.
では,非線形CCI
キャンセラの実際の適用 例としてターボ検出器をとりあげ,それを適用したMIMO-OFDM
伝送による10 Gbps
フィールド実験 の概要と結果について述べ,更に高速伝送への課題に ついて述べる.最後に5.
で論点をまとめる.2.
セルラーにおける干渉キャンセラ2. 1
適応等化器ISI
をキャンセルする等化器はセルラーにおいて最 初に導入された干渉キャンセラと考えられるが,その 等化機能は単に遅延波を除去して直接波を残す技術で はなく,着目するシンボルの分散した成分を合成する とともに,他シンボルのISI
を除去するように信号検 出を最適化する技術である[41]
.等化処理をシンボル間隔
T
sごとに行うとする.i
を 整数として,t
i= iT
sにおける送信信号をs
i,受信信 号をy
iとする.これらの変数は無線では一般に複素数 である.ここでは簡単化のためs
i= ± 1
とする.因果 律のもとではy
i=
Dd=0
h
ds
i−dの畳み込みの関係が ある.ここで,複素離散インパルス応答h
dは複素イン パルス応答のサンプリング値であり,DT
sは最大遅延 時間である.d > D, d < 0
においてh
d= 0
とする.したがって,
i
におけるy
iは現時点と過去のD + 1
個 の送信符号で決まる.h
dは無線伝送路のフェージング 変動により変動するが,レイリーフェージング環境で は独立に変動する複素ガウス変数である.ここで
d
0= arg max
d|h
d|
とする.y
iとs
i−d, d = 0 , . . . , D
との平均相互情報量M
dを計算すると,M
dの大きさの順序は対応する
h
dの大きさの順序になる ことが多い[42]
.すなわち,y
iを受けたときにs
i−d0の情報を最も多く受け取れる可能性が高い.そこで,
時間の原点を
d
0だけシフトさせる.このとき,畳み込 みはy
i=
Dpd=Df
h
ds
i−d, D
f= −d
0, D
p= D − d
0となる.ここで,
D
f≤ d < 0
のh
dは非因果的成分,0 ≤ d ≤ D
pのh
dは因果的成分である[42]
.簡単化の ために以下では|h
0| = max
d|h
d| = 1
となるようh
dを正規化する.
このような
h
dの線形歪により無線伝送特性はか なり劣化するので[12]
,等化器が適用される.等化 器は線形等化器(linear equalizer: LE)
,判定帰還形 等化器(decision feedback equalizer: DFE)
,最ゆう 系列推定(maximum likelihood sequence estimator:
MLSE)
形等化器に分類される[7], [8], [13], [41]
〜[43]
. これらの等化器の基本構成を図1
に示す.図1 等化器の基本構成 Fig. 1 Basic configuration of equalizers.
LE
はサンプリングされた受信信号をトランスバーサ ルフィルタ(transversal filter: TVF)
に入力し,フィ ルタタップ係数を乗積して等化出力を得る[42]
.ここ で,入力信号における複素離散インパルス応答のサン プリング値h
dの系列をz
変換し,因果的成分のみから 成る有理多項式H ( z ) = N ( z ) /D ( z )
で表示する.た だし,D ( z )
におけるz
の0
次の項の係数は1
,N ( z )
の0
次の項の係数は0
でないとする.H ( z )
は時間的 に収束し,安定であるとする.D ( z )
とN ( z )
の全ての 零点が複素z
平面上において単位円の内側にあれば,逆フィルタ
H
−1( z )
,すなわちLE
,のタップ係数も安 定であり,H ( z )
は狭義の最小位相推移であるといわ れる[43]
.もし,N ( z )
の零点が一つでも単位円の外 側にあれば,逆フィルタH
−1( z )
は因果的に安定では なく,このときH ( z )
は非最小位相推移であるといわ れる.また,零点が単位円上の場合,H
−1( z )
は振動 するので[42]
,この場合を含む最小位相推移は緩和さ れた最小位相推移とよばれる[43]
.無線システムにお ける複素離散インパルス応答はフェージングでランダ ムに変動するので,緩和された最小位相推移と非最小 位相推移の状態間を常に遷移している.そのため,LE
は構造的には簡易であるがセルラー環境では適用でき ない.DFE
は判定結果が正しいとして,TVF
によるフィー ドバックフィルタ(feedback filter: FBF)
を介して入 力に加算し,因果的成分をキャンセルする.非因果的 成分については,入力側にフィードフォワードフィル タ(feedforward filter: FFF)
を設け,線形処理によ り因果的成分に変換してキャンセルする.FFF
は1/2
図2 RLS-MLSEの基本構成 Fig. 2 RLS-MLSE equalizer.
分数間隔サンプリングにしてタイミングの最適化も行 う
[42], [43]
.このような構成で複素離散インパルス応 答の零点が単位円上または外側にあるときでも安定 して動作する[12], [43]
.判定結果には雑音が含まれて いないので,等化特性はLE
より優れているが[43]
,SNR
が低いときには判定誤りが伝搬し,伝送特性が 急激に劣化する.DFE
のTVF
出力には入力に比例し ない判定結果が重畳されているので,DFE
は非線形 等化器に分類される.MLSE
形等化器では,チャネルを有限状態マシン(finite state machine: FSM)
と考え,FSM
の状態遷 移を推定してゆう度が最も高い受信シンボルを出力す る[44]
.基準タイミングにおける受信信号y
iは,複 素離散インパルス応答h
d内のシンボル系列のうち 先端のシンボルs
Df を除いたD
個のシンボル系列s
Df−1, . . . , s
Dpにより形成された2
D個の状態のマル コフ過程を反映していると考える.その状態遷移はト レリスを形成するので,そのトレリス線図に沿ったメ トリックを測定してビタビアルゴリズムにより系列を 推定し,その推定ビットが出力される[41]
.そのため ビタビ等化器ともよばれる.基本動作にフィルタを含 まないので複素離散インパルス応答の零点に起因する 問題等は発生しない.ブランチメトリックの誤差は入 力と,入力には比例しない状態候補に対応したレプリ カとの差分であるので,MLSE
形等化器は非線形等化 器に分類される.GSM
では等化性能の高いMLSE
形 等化器が検討された.同時期,
PDC
でも大きなセルへの等化の適用が研 究された.PDC
はGSM
に較べてT
sが長く,伝搬路 変動の目安である正規化最大ドップラ周波数f
DT
sが 大きい.そのため,図2
に示す等化性能と適応性能 が優れた,逐次最小2
乗法(recursive least squares:
RLS)
を用いた最ゆう系列推定型等化器(RLS-MLSE)
が考案され,その性能が理論及び室内とフィールド の実験で確認された
[14], [15]
.RLS-MLSE
では,無 線伝送路を生成過程と観測過程からなるカルマンフィ ルタモデルで表現し,時間変動に伴うチャネルのイノ ベーションを含む形式に拡張された逐次最ゆう推定理 論から,チャネル状態遷移の最ゆう系列推定とチャネ ルパラメータのカルマンフィルタ推定を同時に行う,ブラインド受信プロセスを導出している
[16]
.2. 2 CCI
キャンセラ2. 2. 1
セルラーにおける初期のCCI
キャンセラ 無線システムにおいてアダプティブアレーが干渉を 抑え,SINR
を最適化できることは1970
年代に示さ れていた.しかしながら,それらの検討では移動無線 通信では不可避であるフェージング現象が十分考慮さ れていなかった[10]
.ディジタル伝送セルラーにおけ るレイリーフェージングを考慮した線形CCI
キャン セラとして,アダプティブアレーが1980
年代に検討 された.まず,理論的には複数アンテナに干渉波が
1
波の場 合にアレーを最適合成したときの平均BER
特性が求 められた[45]
.次に,複数アンテナ受信のMMSE
フィ ルタ合成において,複数干渉波がある場合の平均BER
特性と干渉抑圧特性について計算機シミュレーション が行われた[46]
.また,1
チャネルを複数のユーザが 利用する場合のシステム特性が計算機シミュレーショ ンで検討された[47]
.更に,MS (mobile station)
に おいてN
個の送信アンテナ,BS (base station)
にお いてM
個の受信アンテナを用いると,平均通信路容 量がそれぞれのアンテナ数に応じて増大することが明 らかにされた[48]
.また,レイリーフェージング環境における複数送受 アンテナシステムにおいて受信の
MMSE
最適化にお ける平均BER
特性が理論的に求められた[17]
.以上のように複数送信アンテナと複数受信アンテナ 間のチャネルは無相関な複素ガウス変数を仮定したダ イバーシチ環境で,
MMSE
フィルタにより最適合成 する受信系を構築すれば,加入者数,あるいは通信路 容量を増大できることが,計算機シミュレーションと 理論のレベルで示された.MMSE
最適フィルタ合成には,干渉を消した分だ けダイバーシチ利得が低下することが平均BER
特 性の解析で定量的に明らかにされた[17]
.この劣化 は非線形CCI
キャンセラが有効に動作すれば,干渉 信号が除去されるので,ダイバーシチ効果が再現し,平均
BER
特性が大幅に改善されることが指摘され た[17], [48]
.しかしながら,1990
年代初めまで,非線 形CCI
キャンセラは,有線ではVan Etten (1970)
, 無線ではNichols (1977), Monsen (1984)
によって原 理的な有効性が確認されただけであった[18]
.2. 2. 2 ICE
フェージング変動の追従性がよく,
ISI
キャンセル 性能が高いRLS-MLSE
適応等化技術をCCI
キャン セラへ拡張するため非線形の干渉キャンセル等化器(interference canceling equalizer: ICE)
が考案され た[18]
〜[21]
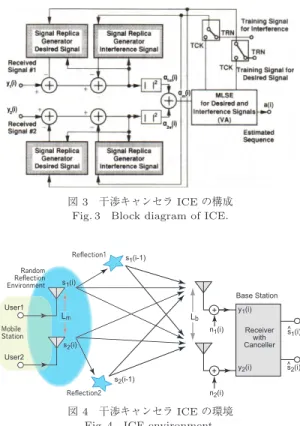
.図3
にICE
の基本構成を示す.図2
と 比較すれば容易に分かるように,ICE
はRLS-MLSE
を2
ブランチにして,1
波の干渉波をキャンセルする ようレプリカ生成部を加えたものである.同図の信号 は複素数表示である.また,VA
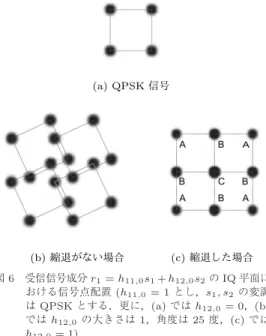
はビタビアルゴリズ ムを表す.ICE
を動作させる環境を図4
に示す.異なるデー タ 系 列 で 変 調 さ れ た ユ ー ザ1
の 信 号s
1( t )
と ユ ー ザ2
の 信 号s
2( t )
が そ れ ぞ れ 二 つ の 送 信 ア ン テ ナ か ら 送 信 さ れ る .図 のL
m は 移 動 機 側 の ア ン テ ナ 間 距 離 で あ る .一 方 ,第l
番 目 の 受 信 ア ン テ ナ に図3 干渉キャンセラICEの構成 Fig. 3 Block diagram of ICE.
図4 干渉キャンセラICEの環境 Fig. 4 ICE environment.
接 続 さ れ た 受 信 機 に は
y
l( i ) = y
l1( i ) + y
l2( i ) + n
l( i ) , y
l1= h
l1,0( i ) s
1( i ) + h
l1,1( i ) s
1( i − 1) , y
l2= h
l2,0( i ) s
2( i ) + h
l2,1( i ) s
2( i − 1) , l = 1 , 2
が入力さ れる.ただし,i
はシンボルタイミング,n
l( i )
は雑 音 ,h
l1,τ( i ) , h
l2,τ( i ) , τ = 0 , 1
は 等 価 複 素 チャネ ル イ ン パ ル ス 応 答 ,τ
は0
が 直 接 波 ,1
が 遅 延 波 である.図のL
bは基地局側のアンテナ間距離であ る.移動しているのでチャネルはレイリーフェージ ング環境にある.受信機ではy
l( i )
のレプリカ信号y ˆ
lm( i )
が生成される.レプリカ信号を生成するとき は,MLSE
のデータ系列候補m
をもとに各ユーザ の 信 号 の 推 定 と ,各 伝 達 関 数 の 時 間 変 動 す る 係 数h
l1τ( i ) , h
l2τ( i )
を推定している.アンテナごとのメト リックα
lm( i ) = |e
lm( i ) |
2, e
lm( i ) = y
l( i ) − y ˆ
lm( i )
及 び合成メトリックα
m( i ) = α
1m( i ) + α
2m( i )
が計算さ れる.このメトリックをもとにしてMLSE
によりデー タ系列を推定し出力する.VA
では,s
1( i − 1)
の信号 候補s
1mとs
2( i − 1)
の信号候補s
2mから定義された 状態Ψ
m= ( s
1m, s
2m)
の遷移をトレリス線図に沿っ て推定している.信号がQPSK
のとき,各信号の候 補数がM = 4
であるからM
2= 16
個の状態がある.図
5
には2
パスレイリーフェージング環境における2
ブランチICE
の計算機シミュレーションによる平均BER-
平均CIR
特性を示す[21]
.平均CIR
が小さい ほど干渉レベルが大きい.平均CIR
が− 9 dB
以上に おいて,平均BER
が10
−3以下に抑えられているICE
のフィールド実験においても,フェージング シミュレータによる室内実験とほぼ同等の結果が得図5 2ブランチICEのBER特性 Fig. 5 BER Performance of two branch ICE.
られた
[22]
.実験では,MS
にL
m= 6 . 7 λ
,ただしλ
は1
波長,離した二つのアンテナがあり,2
ユーザが 各アンテナから送信する.MS
はその道路沿いの建物 で囲まれて走行しているので,MS
の2
アンテナ間 のフェージング相関はほぼ0
と考えられる.BS
ではL
b= 25 λ
離した二つのアンテナで受信した.BS-MS
間は1.25–1.75 km
離れており,BS
からはMS
のア ンテナを見通すことはできない.MS
周辺15 m
くら いの建物等で反射してBS
に届くとすると入射角度広 がりは1
度程度となるので,アンテナ間のフェージ ング相関を0.5
以下にするよう25
波長程度アンテナ を離す必要があった[10]
.MS
,BS
ともアンテナ間の フェージング相関が低く保たれ,ダイバーシチ環境が 実現されていた.MS
の2
送信アンテナは2
ユーザのそれぞれのアン テナとみることもできるし,1
ユーザの二つのアンテ ナとみることもできる.前者は加入者数の増大,後者 は1
ユーザの通信路容量増大と解釈できる.これは後 述するMIMO
の重要な特徴である.ICE
では静的環境でCIR
が0 dB
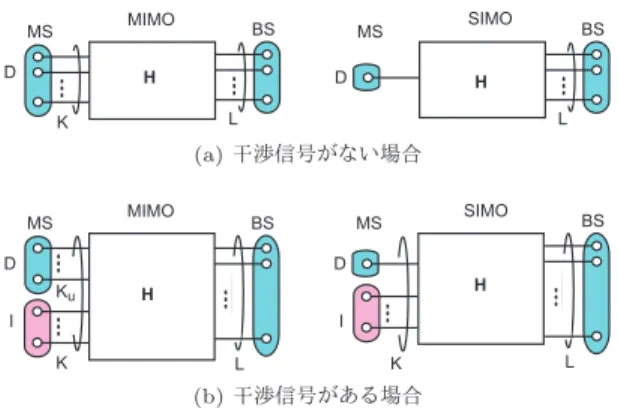
のとき,図6
に 示すように受信信号点配置に縮退が起こり,BER
特 性が劣化した[19]
.同図は,遅延波がないときの受信 アンテナ1
におけるIQ
平面における受信信号点の例 を示している.変調はQPSK
であり,幾つかのサン図6 受信信号成分r1=h11,0s1+h12,0s2のIQ平面に おける信号点配置(h11,0= 1とし,s1, s2の変調 はQPSKとする.更に,(a)ではh12,0= 0,(b) ではh12,0の大きさは1,角度は25度,(c)では h12,0= 1)
Fig. 6 Signal constellations for received signals.
プル値を重ね書きしてものである.そのため以下の説 明では
( i )
の表記をはずした.同図(a)
はユーザ1
の みが信号s
1を送信しているときのQPSK
の信号点で ある.(b)
は通常の劣化していない受信信号点の例で ある.二つのQPSK
が重なって16
点が識別できる.雑音が小さければこの
16
点から送信データが復元で きる.(c)
はh
11,0= h
12,0= 1
の例である.この場 合,図のA
で示した点は重なりがないが,B
では異な る信号点二つが重なっている.C
では四つの信号点が 重なっている.このため,16
点あるはずの信号点が9
点に縮退しており,誤り率特性が劣化する.この現象への対処方法には,
i)
ダイバーシチの導入,ii)
誤り訂正の導入等がある.前者は,ダイバーシチに おける第1
と第2
ブランチで同時にこの現象が起きる 確率は小さいので合成メトリックを用いて,MLSE
を 行うことにより劣化が無視できるようになる[19]
.後 者は,送信データ系列にトレリス符号化を行うことに より,拘束長にまたがって受信信号を状態遷移として 観測するので,MLSE
のパスメトリックに沿って分離 でき,復号処理とICE
との結合処理でほぼ取り除く ことができる[49]
.なお,遅延波がある場合には,ト レリス符号化を行わなくても,ISI
のある受信信号をMLSE
等化処理において符号化と同様に状態遷移とし て観測するので縮退の影響を軽減することができる.2. 2. 3 CCI
キャンセラの高度化3G
システムではマルチメディア端末が浸透し,4G
システムでは,更にインターネット接続への要求が増 大することが予想された.そのため,高速伝送への要 求に応えるためユーザ当りの通信路容量増大が要求さ れた.Foschini
は基地局と1
ユーザにそれぞれ複数ア ンテナを配置してCCI
キャンセラを適用すれば高速伝 送が可能であることを示した[50]
.このシステムは現 在MIMO
とよばれているが,異なるアンテナから異 なる信号が同時送信されるので,受信アンテナではそ れらの信号が互いに干渉となり,CCI
キャンセラは必 須である.また,1
ユーザの複数アンテナを分割して 複数のユーザに割り当てることも可能であり,この場 合は加入者数の増大になり,MU-MIMO (multiuser MIMO)
とよばれる.前述したICE
をMIMO
の観点 からみると,2 × 2 MIMO
に等化機能を付与したも のである.各ユーザのアンテナ数は1
であるが,MU- MIMO
と同様に.PDC
の1
ユーザ当たりの高速化で はなく加入者数の増大をシステムの狙いとしていた.適応等化器から
CCI
キャンセラへのパラダイムシフトに伴い,セルラ用干渉キャンセラ技術の理論は 深く掘り下げられ,また多くの手法が取り込まれた,
その結果,キャンセル性能は大幅に向上した
[51]
〜[57]
.なお,幾つかの興味深い環境におけるMIMO
通信路容量,固有値分布などが,理論的に解かれてい る[58], [59]
.一方,ISI
対策としてはOFDM
が取り 入れられ,MIMO-OFDM
が研究の主流となった.高速化のためにキャンセルすべき干渉信号の数が増 大し,変調の多値化が進むと,
ICE
で行っていたよう な,受信信号に対して単純に全レプリカを生成して比 較する単純な非線形CCI
キャンセラでは演算量が非 常に大きくなり実用的ではなくなった.一方,受信信 号を変調された信号の空間に線形フィルタで変換した 場合は,雑音が強調され特に受信アンテナ間相関が高 いときに特性が大きく劣化する欠点があった.そこで,これらの問題に対して二つのアプローチが検討された.
一つは非線形
CCI
キャンセラの演算量を低減する以 下の三つの方法である.(
1
)M
アルゴリズムにより探索範囲を絞り込ん だCCI
キャンセラ:代表的なものにQRD-M (QR decomposition and M-algorithm)
がある[60]
.この 方法は最ゆう判定に基づく信号判定を行う最ゆう検出 器(ML detector: MLD)
の近似である.まず,推定 されたチャネル行列をQR
分解して,受信信号に求め られたユニタリ行列Q
を乗積する.雑音がない場合 には後退代入で容易に送信信号が求まるが,通常は雑 音があるので後退代入を行う方向に信号候補とのメト リックを計算し,蓄積・比較・M
個の候補の選択,を しながら解をツリー状に探索する.ユニタリ変換では 雑音の統計的性質は不変であるから.蓄積されたメト リックを単純に比較する探索が可能である.更に,ブ ランチメトリックの演算方法と候補の選択方法を改良 し,実用的にしたQRM-MLD (complexity-reduced MLD with QR decomposition and M-algorithm)
が 知られている[61]
.なお,同様にQR
分解を用い,あ る半径の超球内の信号をツリー状に探索するスフィア デコーディングも知られている[56]
.(
2
) 逐次干渉キャンセラ(successive interference
canceler: SIC)
:SINR
の高い信号成分をMMSE
フィ ルタで抽出し,硬判定ないし通信路符号を復号化し たシンボル系列とチャネル推定結果からその成分のレ プリカを生成して,受信信号から除去する.この干 渉がキャンセルされた受信信号から次にSINR
の高 い成分に対して同様の処理を逐次的に行うものである
[62]
.相関の強いチャネルがあると,SINR
が低い ときにDFE
と同様に判定誤りが伝搬し,特性がやや 劣化する[56]
.(
3
) 並 列 干 渉 キャン セ ラ(parallel interference canceler: PIC)
:MMSE
フィルタで求めた干渉成分 を全て一度にキャンセルする方法である.近年,ター ボ原理が考案され,軟判定結果を用いて繰り返し処 理を行うことによりPIC
を効率良く実現できるよう になった.DS-CDMA (direct spread code division multiple access)
のコード間干渉[63]
,MIMO
の選択 性フェージング環境における等化[64]
,そのMIMO- OFDM
への拡張[65]
,MIMO-OFDM
のGI
を越え る遅延のキャンセル[23]
,ターボ原理の情報理論的考 察[66]
などがある.もう一つのアプローチは,
MMSE
フィルタの出力 はそのままで,ゆう度の相関を考慮して信号の判定を 行う以下の方法である.(
4
) 雑音強調が強い方向へ探索するCCI
キャン セラ:MMSE
フィルタで受信信号を変換したときに 発生する雑音強調により雑音は変調信号のベクトル空 間において非等方的に分布し,チャネル行列の相関行 列の固有値が小さい固有ベクトルの方向に強調されて いる.これは,変調信号のベクトル空間においてゆう 度の非等方的分布となる.そのため,相関行列の条件 数が大きいときは,ベクトル空間における非等方的な ゆう度を考慮して探索すれば雑音強調の影響を抑圧す ることができる[24]
.上述した
CCI
キャンセラはMIMO
における受信 処理であるが,図7
に示すように,チャネルH
にお いて,送信処理F
と受信処理G
の結合処理を行うこ とにより,きめ細かな通信品質の制御が可能になり,多様な無線ネットワーク形成が可能となる
[67]
.線形 処理F
はプレコーディングとよばれる.ただし,送 信側でチャネル状態情報(channel state information:
CSI) H
が既知であるとする.送信情報は分割されて,独立した固有チャネルに多重化されて伝送されるので,
図7 プリコーダのある構成 Fig. 7 MIMO configuration with precoder.
固有チャネルへの情報配分と電力リソースの配分を制 御するため,固有チャネルの信頼度を考慮して
F
を適 切に設定すると,情報レート最大化(
ウォータフィリ ング解)
,QoS
制御,固有チャネル誤差の公平化,CSI
誤差に対する感度の制御,ビット誤り率最小化などが 可能になる[25], [67]
.その他の干渉キャンセラの応用としては
OFDM
のサブキャリア間干渉(inter-subcarrier interference:
ICI)
のキャンセルが挙げられる.MIMO-OFDM
にお けるGI
を越える遅延,ローカル発振器の位相雑音,ガ ウスマルチキャリヤ(Gaussian multicarrier: GMC)
非直交変調方式における復調において,ICI
キャンセ ラが有効である[23]
〜[28]
.3.
統計的信号処理からみた干渉キャンセラ3. 1 ML
とMAP
2G
セルラーでは,信号検出処理における信号判定 は硬判定も含めてML
規範をベースとしていた.ま た,誤り訂正には畳み込み符号が検討され,その復号 にはML
規範が一般に用いられた.3G
では,誤り訂 正にはより高度なターボ符号の適用が検討され,更に4G
においてはLDPC
符号が検討された.これらの 復号には事前確率の更新を含めて事後確率を最大化す るMAP
規範が用いられている.そのため,近年,干 渉キャンセラを用いた復調と誤り訂正符号の復号との 結合処理にもMAP
が研究されている[29], [30], [63]
〜[66], [68]
.以下では,様々な干渉キャンセラでよく用いられる
MMSE
フィルタとそれに関連した最適化アルゴリズ ム,先に述べたRLS-MLSE, ICE
の構成,またチャネ ル行列を推定するカルマンフィルタと一体化した適応 干渉キャンセラを,ML
またはMAP
という統計的信 号処理の観点[69], [70]
から導出する.既にある多くの アルゴリズムを,ML
とMAP
から統一的に導出する ことによってそれらの相互関係をより深く理解できる ようになる.また,非線形
CCI
キャンセラにおいてもSIC
,PIC
等ではMMSE
フィルタが用いられるが,ここでは,PIC
用の残留干渉を抑圧するフィルタが3. 4. 4
,e )
においてMAP
から導かれることを具体例として示す.3. 2
チャネルモデル信号のサンプリング時刻を
iT
sとする.ただし,i
は 整数である.サンプリング時刻は受信信号の適切なタ イミングに同期しているとする.K
個のうちk
番目のアンテナの送信信号を
s
k( i )
,L
個のうちl
番目のアン テナの受信信号をy
l( i )
とする.ただし,k = 1 , . . . , K , l = 1 , . . . , L
である.また,K
とL
は基本的にK ≤ L
とするが,例外があるのでそのときに述べる.s
k( i )
はM
個の複素シンボルで変調されているとする.この ときy
l( i ) =
K k=1 D d=0h
l,k,d( i ) s
k( i − d ) + n
l( i ) (1)
となる.ただし,
h
l,k,d( i )
は第k
送信アンテナと第l
受信アンテナの間のdT
s,ただし,d = 1 , . . . , D
,遅 延した等価複素チャネルインパルス応答,DT
sは最大 遅延時間,n
l( i )
は第l
アンテナにおける雑音の複素 包絡線であり,受信アンテナごとに統計的に独立な複 素ガウス過程とする.なお,遅延時間については簡単 化のためにT
sの整数倍とした.これらの変数関係をL = K = 2
,D = 1
を例として図8 (a)
に示す.上式は以下のようにベクトルと行列で表示できる.
ただし,紛らわしい場合を除いてベクトルと行列の表 記における
( i )
を省略する.y = Hs + n, (2)
y =
y
1( i ) y
2( i ) · · · y
L( i )
T, H =
h
ln, h
ln= h
l,k,d( i ) , (3)
d = ( n − 1) mod ( D + 1) , k = n − d + D D + 1 ,
図8 システムの構成と変数の表示(K=L= 2の場合) Fig. 8 A system configuration and variable nota-
tions.
s =
s
1( i ) · · · s
1( i − D ) ,
· · · s
K( i ) · · · s
K( i − D )
T, n =
n
1( i ) n
2( i ) · · · n
L( i )
T.
ここで,
(3)
の第1
式はL × K ( D + 1)
チャネル行列H
の( l, n )
要素表示,s
はK ( D + 1)
次元送信信号 ベクトル,Tは転置を表す.s
の要素には,k
ごとに0 ≤ d ≤ D
の遅延信号が並んでいる.L
次元定常雑 音ベクトルn
の平均はn = 0
L,自己相関行列はR
n,i= n (0) n
H( i ) = δ
0,iR
n, R
n= σ
n2I
Lとする.ただし, は集合平均,Hは複素共役転置,
δ
0,iはク ロネッカーのデルタ,I
LはL × L
単位行列である.こ れらのベクトルと行列の関係を図8 (b)
に示す.なお,チャネル行列
H
と送信信号ベクトルs
はH =
H
1H
2· · · H
Ks =
s
T1s
T2· · · s
TK Tのように
(D+1)
次元第k
送信信号s
kと,対応するL × ( D + 1)
チャネル行列H
kに分解できる.更に,直接波のみ
( D = 0)
,すなわち非周波数選択 性の場合,s
は遅延信号のないK
次元ベクトルとな る.またL × K
チャネル行列H
の列ベクトル表示はH = h
k, h
k=
h
1,k,0( i ) · · · h
L,k,0( i )
Tとなる.
3. 3
統計的信号処理3. 3. 1
信 号 検 出受信信号
y
から信号パラメータθ
を推定するため,最大事後確率
(MAP)
規範が適用される.ˆ θ = arg max
θ
p ( θ|y ) = arg max
θ
p ( y|θ ) p ( θ )
ただし,ベイズの定理を適用し,最大化に不要なp (y)
は省略した.(2)
から,θ = {s, H}
であるが,s
とH
のそれぞれの推定は他方に依存するので,同時に推 定することはできない.そのため,パケットごとにト レーニング信号s
0を導入して,図9
に示すようにH ˆ
0を推定し,それを確定値として,
s
の推定を行う.H ˆ
0= arg max
H
p (y|s
0, H) p (H) , ˆ s = arg max
s
p ( y|s, H ˆ
0) p ( s ) . (4)
パケット内でH
が変動している場合には,上式第1
式図9 最適信号検出処理と適応チャネル推定処理の関係 Fig. 9 Relationship between optimal signal detection
and adaptive channel estimation.
の
s
0をˆ s
に置き換えて,H ˆ
0を更新し,次に,上式第2
式のH ˆ
0を更新されたH ˆ
に置き換えて新しいˆ s
を 求める.必要であればこの更新を繰り返す.このよう な更新は,(i)
パケットごとに1
回行う方法と,(ii)
パ ケットの先頭からシンボルごとに逐次行う方法がある.3. 3. 2
ビット検出ˆ s
をベースにビット推定が行われるが,誤り訂正がな く冗長性がない場合,s
には状態がないので,P ( s ) = 1
となる.また,畳み込み符号ではMLSE
,いわゆるビ タビ復号が行われるが,この方法ではトレリス線図に 沿って復号され,各状態は同等に扱われるので,P (s)
は等確率である.そのため,(4)
におけるˆ s
の計算に は以下の最ゆう(ML)
規範が適用される.ˆ s = arg max
s
p ( y|s, H ˆ
0) (5)
一方,ターボ符号,
LDPC
においてはMAP
復号が 行われており,その繰り返しにおいて事前確率P ( s )
が 計算可能である.そのため,ˆ s
の計算には(4)
のMAP
規範が適用される.3. 4
チャネル情報が既知の場合の信号検出3. 4. 1
信号検出の解析における干渉環境の分類 上述したMIMO
チャネルに対して,以下では,図10
に示すような干渉環境を考えて受信特性を解析する.図中
D
は希望ユーザ,I
は干渉ユーザを表す.同図(a)
のような干渉がない場合のMIMO
とSIMO
について,3. 4. 2
ではML
規範によるCCI
キャンセラ,3. 4. 3
ではMAP
規範によるCCI
キャンセラの構成を導く.K ≤ L
とする.次に,
3. 4. 4
では,同図(b)
のような干渉があるとき のMIMO
とSIMO
について,MAP
規範によるCCI
キャンセラの構成を導く.希望ユーザのアンテナ数はK
uとする.干渉ユーザのアンテナ数はK − K
u> 1
である.K
はL
より大きい場合もあり得るとする.干 渉ユーザの信号検出は行わないが,チャネル推定は行図10 BS受信解析におけるMIMOとSIMO Fig. 10 MIMO and SIMO for BS reception analysis.
うものとする.希望ユーザ内の異なるアンテナから送 信される信号は相互に干渉しているが,特定のアンテ ナからの希望ストリームを議論するために干渉ユーザ からの干渉とは区別する必要があるときは,干渉スト リームとよぶことにする.なお,本節では遅延がなく
( D = 0)
,CSI
,すなわちチャネル行列,が既知の場 合を扱う.遅延がある場合でチャネルが既知の場合は
3. 5
,更 に遅延があり,かつチャネルを推定する場合は3. 6
で 扱う.3. 4. 2
干渉信号がないときのML
規範a ) MIMO
希 望 信 号
s
がK
個 の ア ン テ ナ か ら 送 信 さ れ ,L ( ≥ K )
個のアンテナで受信されるMIMO
につ いて考える.チャネルは非周波数選択性( D = 0)
であ り,L × K
行列H
は既知とする.このとき,ゆう度 関数はp (y|H, s) = 1 ( πσ
2n)
Lexp
− y − Hs
2σ
n2(6)
となる.
s
の信号候補s
mには各要素ごとにM
個の離 散信号点があるのでHs
mではM
K個の点となり,複 素L
次元空間のノルムにより最適解ˆ s
を求めるための 計算量はLM
Kに比例し非常に大きくなる.そこで,この離散最適化問題を効率良く解くために,一般に
y
を以下のようにして変調された信号s
の判定空間に変 換し,最適化を行う.上式の
exp
の中は符号を除いてy − Hs
2σ
2n= 1 σ
2nH ( s − ˜ s )
2− H ˜ s
2+ y
2,
˜ s = H
+y, H
+= (H
HH)
−1H
H(7)
となる.
H
+はMoore-Penrose
の一般化逆行列であ る.ただし,上式の˜ s
は,離散変数s
を連続変数とみ なしたときに,ゆう度関数を最大にするs
の推定値で あり,連続変数とみなしたときのML
規範による解で ある.s
は離散変数であるから,雑音が小さいときは 次式により最適解が得られる.ˆ s = arg min
s
∈s
m˜ s − s
2(8)
˜ s
の各要素からは他の要素が完全にキャンセルされ ているので,上式の判定は,各要素ごとに独立に複素 平面で行うことができる.(8)
の演算量はKM
に比例 しており,一般に(7)
の計算を考慮しても複素L
次元 空間におけるy − Hs
の最適化より演算量は大幅に 低減されている.˜ s
はゼロフォーシング(zero-forcing: ZF)
解とよば れる.その期待値は˜ s = H
+Hs + H
+n = s
であ るから不変推定量である.しかしながら,H
HH
を固 有値展開したとき,特に小さい固有値が存在すると雑 音が強調されて,˜ s
の分散が非常に大きくなり,解の 信頼性が著しく低下する(
付録1.
参照)
.b ) SIMO
前 節 に お い て
L ≥ K = 1
の と きSIMO
に な る .s = s
1( i ) , H = h
1 で あ る か ら ,(2)
よ りy = h
1s
1( i ) + n
となる.ML
最適解は(7)
より˜ s
1( i ) = h
H1h
12
y
となる.この解は最大比合成
(MRC)
とよばれる.3. 4. 3
干渉信号がないときのMAP
規範a ) MIMO
以下では,前節と同じ仮定のもとで,
s
の事前確率 を導入する.まず,s
は複素ガウス過程で,その平均 と自己相関関数は,0 ≤ |ρ| ≤ 1
,P
u= P
u/K
としてs = ρs
o, s
o2
= P
u, R
s= P
u(1 − |ρ|
2)I
K,
とする.このとき,事前確率密度関数p ( s )
はp ( s|s
o, ρ )
= 1
[ πP
u(1 − |ρ|
2)]
Kexp
− s − ρs
o2
P
u(1 − |ρ|
2)
(9)
とする.上式から
s
の平均電力はs
2= P
uとな る.(6)
とあわせて,事後確率密度関数はp (y|H, s) p (s|s
o, ρ ) = 1
( πσ
n2)
L[ πP
u(1 − |ρ|
2)]
K× exp
− y − Hs
2σ
n2− s − ρs
o2
P
u(1 − |ρ|
2)
に比例する.上式のexp
の中は符号を除いてy − Hs
2σ
2n+ s − ρs
o2
P
u(1 − |ρ|
2)
= y − Hρs
o− H ( s − ρs
o)
2σ
n2+ s − ρs
o2
P
u(1 − |ρ|
2)
= y
D− Hs
D2
σ
n2+ s
D2
P
u(1 − |ρ|
2)
= (s
D− ˜ s
D)
HH
HH
σ
n2+ I
KP
u(1 − |ρ|
2)
(s
D− ˜ s
D)
− ˜ s
HDH
HH σ
n2+ I
KP
u(1 − |ρ|
2)
˜ s
D+ y
D2
σ
n2,
˜ s
D=
H
HH + I
Kγ (1 − |ρ|
2)
−1H
Hy
D, (10) γ = P
u/σ
n2∴ ˜ s =
H
HH + I
Kγ (1 − |ρ|
2)
−1H
Hy
D+ ρs
o=
H
HH+ I
Kγ (1−|ρ|
2)
−1H
Hy+ ρs
oγ (1 −|ρ|
2)
(11)
となる.ただし,y
D= y − Hρs
o, s
D= s − ρs
oで り,レプリカ信号ρs
oが得られたときに,それをキャ ンセルする処理を表す.また,˜ s
はML
規範と同様にs
を連続変数とみなしたときに事後確率密度関数を最 大にするs
である.離散変数としての最適解は雑音が 少ないとき(8)
により与えられる.ρ = 0
の場合には˜ s =
H
HH + γ
−1I
K −1H
Hy (12)
となる