Experimental Investigation of
Obstacle‑Avoiding Mobile Robots without Image Processing
著者 Masuda Hiroshi, Mimura Yoshio, Omura Yasuhisa journal or
publication title
Science and technology reports of Kansai University = 関西大学理工学研究報告
volume 50
page range 1‑15
year 2008‑03‑20
URL http://hdl.handle.net/10112/12436
S c i e n c e a n d T e c h n o l o g y R e p o r t s o f K a n s a i U n i v e r s i t y N o . 5 0 , 2 0 0 8 ー
E x p e r i m e n t a l I n v e s t i g a t i o n o f O b s t a c l e ‑ A v o i d i n g M o b i l e R o b o t s w i t h o u t Image P r o c e s s i n g
H i r o s h i MASUDA*, Y o s h i o MIMURA*, a n d Y a s u h i s a OMURA*
( R e c e i v e d O c t o b e r 2 , 2 0 0 7 )
Abstract
A s i m p l e method t o d e t e c t s t e p h e i g h t , s l o p e a n g l e a n d t r e n c h w i d t h u s i n g f o u r PSD r a n g e s e n s o r s ( G P 2 D l 2 ) i s p r o p o s e d , a n d t h e r e p r o d u c i b i l i t y a n d a c c u r a c y o f c h a r a c t e r i s t i c p a r a m e t e r d e t e c t i o n a r e e x a m i n e d . The d e t e c t i o n e r r o r o f upward s l o p e a n g l e i s w i t h i n 2 . 5 d e g r e e s , w h i l e t h a t o f downward s l o p e a n g l e e x c e e d e d 2 0 d e g r e e s v e r y l a r g e . I n o r d e r t o r e d u c e s u c h e r r o r s , a r a n g e s e n s o r t h a t h a s b e t t e r r a n g e ‑ v o l t a g e p e r f o r m a n c e must b e i n t r o d u c e d , o r we w i l l h a v e t o i n c r e a s e t r i a l f r e q u e n c y t o p r e v e n t d e t e c t i o n d e l a y . S t e p h e i g h t c a n be i d e n t i f i e d w i t h a n e r r o r o f
土1 . 5mm. Trench w i d t h c a n n o t b e r e l i a b l y measured a t t h i s t i m e . I t i s s u g g e s t e d t h a t a n a d d i t i o 叫 methodi s n e e d e d i f we a r e t o a d v a n c e t h e f i e l d o f o b s t a c l e d e t e c t i o n .
I n d e x Terms ‑ o b s t a c l e c l a s s i f i c a t i o n , PSD r a n g e s e n s o r , I R s e n s o r , t r e n c h , s l o p e , s t e p
1 . I n t r o d u c t i o n
I n t h e l a s t d e c a d e , autonomous m o b i l e r o b o t s have been a t t r a c t i n g a l o t o f a t t e n t i o n and t e c h n i c a l l e v e l s have d r a m a t i c a l l y advanced ( s e e , f o r i n s t a n c e , 1 l ) . Many r o b o t s p r o v i d i n g e n t e r t a i n m e n t , room c l e a n i n g and o t h e r s e r v i c e s have a l r e a d y been d e v e l o p e d 2 ) . To be t r u l y p r a c t i c a l , r o b o t s must be a b l e t o a c q u i r e environmental e v e n t s and/ o r s p a t i a l i n f o r m a t i o n about i t s environment. Some r o b o t s f o r entertainment have o p t i c a l s e n s o r s , u l t r a s o n i c s e n s o r s , t o u c h s e n s o r s and o t h e r c o n f i g u r a t i o n s . To c r e a t e more autonomous r o b o t s t h a t s u i t f u t u r e a p p l i c a t i o n s , a 2 ‑ D r a n g e s e n s o r 3 l and a CMOS‑imager c a m e r a 4 l a r e b e i n g s t u d i e d e x t e n s i v e l y . I n t h e s e s t u d i e s , s e n s o r d o w n ‑ s i z i n g i s an o n ‑ g o i n g c o n c e r n . However, t h e n e w l y ‑ d e v e l o p e d s e n s o r s a r e s t i l l e x p e n s i v e , and computing overheads a r e a p t t o i n c r e a s e . T h i s i s a fundamental problem w i t h t h e p r e s e n t r e s e a r c h roadmap.
砂 pathp l a n n i n g f o r m o b i l e r o b o t s has a l s o been s t u d i e d e x t e n s i v e l y 5 l ; i t i s thought t h a t combining t h e path p l a n n i n g m e t h o d 6 ) w i t h t h e p o t e n t i a l ‑ f i e l d m e t h o d 7 l o r a mapping t e c h n i q u e would be a p r o m i s i n g a p p r o a c h . These t e c h n i q u e s a r e a l s o needed f o r a f u t u r e g e n e r a t i o n o f s e l f ‑ l e a r n i n g r o b o t s .
T h i s paper i n v e s t i g a t e s how t o d e t e c t and c l a s s i f y o b s t a c l e s i n f r o n t o f a r o b o t w i t h o u t a c a m e r a . The purpose o f t h i s paper i s ( 1 ) t o r e a l i z e a r o b o t t h a t can d e t e c t t h e d i f f e r e n c e s between s t e p , s l o p e and t r e n c h , ( 2 ) t o form a r i t h m e t i c p r o c e d u r e s t o e s t i m a t e c h a r a c t e r i s t i c
* G r a d u a t e S c h o o l o f S c i e n c e a n d E n g . , K a n s a i U n i v e r s i t y , 3 ‑ 3 ‑ 3 5 Y a m a t e ‑ c h o , S u i t a , O s a k a 5 6 4 ‑ 8 6 8 0 ,
J a p a n .
2 H i r o s h i MASUDA, Y o s h i o MIMURA, a n d Y a s u h i s a OMURA
v a l u e s ( s t e p h e i g h t , s l o p e a n g l e and t r e n c h w i d t h ) , and ( 3 ) t o p r o p o s e a l g o r i t h m s t h a t y i e l d r e l i a b l e j u d g m e n t s . Four PSD IR r a n g e s e n s o r s a r e a p p l i e d t o t h e r o b o t . E x p e r i m e n t s on t h e r o b o t c h a l l e n g e i t s s e n s o r f u n c t i o n s w i t h s t e p s , s l o p e s and/ o r t r e n c h e s .
The e l e c t r i c a l o r m e c h a n i c a l c o n f i g u r a t i o n o f t h e r o b o t i s d e s c r i b e d i n S e c t i o n 2 . S e c t i o n 3 d e s c r i b e s t h e measurement a c c u r a c y o f t h e PSD r a n g e s e n s o r s u s e d . S e c t i o n 4 p r o p o s e s a l g o r i t h m s t h a t a l l o w t h e r o b o t t o d e t e c t o b s t a c l e s and e s t i m a t e c h a r a c t e r i s t i c v a l u e s . S e c t i o n 5 d e s c r i b e s t h e r e s u l t s o f a n o b s t a c l e ‑ d e t e c t i o n t e s t and t h e r e l i a b i l i t y o f o b s t a c l e r e c o g n i t i o n . F i n a l l y , some r e m a i n i n g i s s u e s a r e s u m m a r i z e d .
F i g . 1 P h o t o o f a n a s s e m b l e d r o b o t f o r t e s t i n g .
2 . Mechanical and E l e c t r i c a l Architecture o f t h e Robot
A p i c t u r e o f t h e p r o t o t y p e r o b o t t e s t e d h e r e i s shown i n F i g . 1 . The r o b o t h a s two n o n ‑ d r i v e n c a s t e r w h e e l s a t t h e f r o n t and two m o t o r ‑ d r i v e n w h e e l s a t t h e back whose r o t a t i o n s p e e d s a r e c o n t r o l l e d by a m o t o r ‑ d r i v e c i r c u i t . The m o t o r ‑ d r i v e n w h e e l s have f o u r r o t a t i o n modes ( b r a k e , s t o p , f o r w a r d , and b a c k ) . S i n c e t h e s e f o u r f u n c t i o n s a r e i m p l e m e n t e d on t h e w h e e l s i n d e p e n d e n t l y , t h e r o b o t c a n move i n any d i r e c t i o n . Four r a n g e s e n s o r s a r e p l a c e d o n t h e f r o n t o f t h e r o b o t ( P S D l L , PSDlR, PSD2L and PSD2R, r e s p e c t i v e l y ) t o d e t e c t o b s t a c l e s i n f r o n t o f t h e r o b o t ( S e e F i g . 2 ) . These f o u r s e n s o r s d e t e c t d i s t a n c e s f r o m t h e s e n s o r t o t h e f l o o r , and t h e m i c r o ‑ c o n t r o l l e r c a l c u l a t e s c h a r a c t e r i s t i c v a l u e s f o r e x a m p l e , t h e s l o p e a n g l e 0 when t h e o b s t a c l e i s a s l o p e .
PSDl PSD2
PSDlL PSDlR
XI
( a ) s i d e view ( b ) t o p view
F i g . 2 S c h e m a t i c o f s e n s o r s ' l a y o u t .
D i s p l a y T e r m i n a l ( P C )
F i g . 3 E l e c t r o n i c c o n t r o l s y s t e m f o r m o t o r
d r i v e r a n d o t h e r s .
E x p e r i m e n t a l I n v e s t i g a t i o n o f O b s t a c l e ‑ A v o i d i n g M o b i l e R o b o t s w i t h o u t I m a g e P r o c e s s i n g 3
The e l e c t r o n i c a r c h i t e c t u r e o f t h e r o b o t i s shown i n F i g . 3 . The c i r c u i t ‑ m o u n t e d b o a r d i n c l u d e s a m i c r o ‑ c o n t r o l l e r ( A D u C 7 0 2 6 8 ) produced by Analog D e v i c e s C o r p . ) t o g i v e t h e r o b o t a d a t a p r o c e s s i n g f u n c t i o n . The m i c r o ‑ c o n t r o l l e r h a s i n p u t t e r m i 叫 sf o r up t o 1 2 s i n g l e ‑ e n d e d AID c o n v e r t e r s and o t h e r a n a l o g p r o c e s s i n g f u n c t i o n s . The micro~controller r e c e i v e s a n a l o g s i g n a l s from s e n s o r s through i t s b u i l t ‑ i n AID c o n v e r t e r s , l o g i c a l l y a s s i g n s t h e e n v i r o n m e n t t o o n e o f t h e o b s t a c l e s o r no o b s t a c l e and f i n a l l y o u t p u t s t h e c h a r a c t e r i s t i c v a l u e o f t h e o b s t a c l e ( s l o p e a n g l e 0 f o r t h e s l o p e , s t e p h e i g h t h l f o r t h e s t e p , and s o o n ) . The m i c r o ‑ c o n t r o l l e r on t h e MPU b o a r d c a l c u l a t e s t h e o b s t a c l e ' s d i m e n s i o n s , and t r a n s f e r s t h e d a t a t o a PC v i a t h e R C ‑ 2 3 2 i n t e r f a c e .
3 . Accuracy and R e p r o d u c i b i l i t y o f Output S i g n a l o f PSD Sensor
We s t a r t e d by e v a l u a t i n g t h e p o t e n t i a l o f t h e IR r a n g e s e n s o r ( G P 2 D l 2 9 > produced by SHARP C o r p . ) u s e d t o d e t e c t o b s t a c l e s ; we f o c u s h e r e on s e n s o r p e r f o r m a n c e a t t r i b u t e s n o t d e s c r i b e d i n t h e c o m m e r c i a l d a t a s h e e t . T h i s s e n s o r h a s t h e f o l l o w i n g f e a t u r e s :
( 1 ) The d i s t a n c e d e t e c t i o n r a n g e ( s e n s o r t o o b j e c t ) i s 1 0 t o 8 0 c m .
( 2 ) The IR s o u r c e s i g n a l o f o n e s e n s o r i n t e r f e r e s v e r y l i t t l e w i t h t h e f u n c t i o n i n g o f t h e o t h e r s e n s o r s .
( 3 ) The s e n s o r i s b a s i c a l l y i n s e n s i t i v e t o o b j e c t c o l o r and r e f l e c t i v i t y . ( 4 ) The s e n s o r i s b a s i c a l l y i n s e n s i t i v e t o room l i g h t .
( 5 ) D i s t a n c e from t h e s e n s o r t o t h e f l o o r c a n be d e t e c t e d even when t h e o b j e c t s u r f a c e i s t i l t e d . However, t h e v a r i a t i o n i n r a n g e i s s i g n i f i c a n t when t h e t i l t a n g l e i s l a r g e .
( 6 ) Low c o s t and s m a l l .
As j u s t d e s c r i b e d , t h e PSD s e n s o r h a s many a d v a n t a g e s o v e r o t h e r s e n s o r s . I n some c a s e s , There i s a s i g n i f i c a n t amount o f e l e c t r i c a l n o i s e i n t h e o u t p u t s i g n a l , h o w e v e r , when we c o n s i d e r some a p p l i c a t i o n s t h a t demand t h e d e t e c t i o n o f s l o p e a n g l e . T h i s s u g g e s t s t h a t we h a v e t o examine how a c c u r a t e l y t h e s e n s o r d e t e c t s d i s t a n c e from t h e s e n s o r t o t h e o b j e c t ( d e n o t e d by XI and X2 f o r two s e t s o f s e n s o r s , r e s p e c t i v e l y ) b e f o r e we c a n d e s i g n an a c c u r a t e s e n s o r c i r c u i t .
As a n e x a m p l e , we show r a n g e d a t a c r e a t e d by t r a n s f o r m i n g t h e a n a l o g s i g n a l s o f t h e PSD s e n s o r s i n F i g s . 4 and 5 ; F i g . 4 shows t h e o u t p u t o f t h e m i c r o ‑ c o n t r o l l e r when c h a l l e n g e d w i t h an 1 8 ‑ m m ‑ h i g h upward s t e p , and F i g . 5 shows t h a t f o r a 2 0 ‑ d e g r e e downward s l o p e . I n b o t h c a s e s , t h e r o b o t had a c o n s t a n t v e l o c i t y on t h e f l o o r . I n F i g . 4 and F i g . 5 , t h e t h i n l i n e s a r e t h e u n p r o c e s s e d d i g i t a l r a n g e d a t a t r a n s f e r r e d from t h e m i c r o ‑ c o n t r o l l e r , w h i l e t h e b o l d l i n e s a r e t h e r a n g e d a t a a f t e r b e i n g p a s s e d t h r o u g h a median f i l t e r (window number NI= 5 ) ( S e e Appendix I ) .
F i g . 4 shows t h a t t h e median f i l t e r i s e f f e c t i v e i n removing t h e i m p u l s e n o i s e . I t a l s o shows t h a t t h e f i l t e r y i e l d s a t i m e d e l a y , r e s u l t i n g i n a 5‑mm l o c a l p o s i t i o n d i f f e r e n c e i n t h e c a s e o f NI = 5 . The n o i s e c a n be f u r t h e r r e d u c e d by i n c r e a s i n g N I , b u t a t t h e c o s t o f s i m u l t a n e o u s l y i n c r e a s i n g t h e t i m e d e l a y . B e c a u s e o f t h i s t r a d e ‑ o f f , i t ' s p r e f e r a b l e t o a d j u s t NI t o s u i t t h e a p p l i c a t i o n .
I n F i g . 5 , t h e i m p u l s e n o i s e i s s u f f i c i e n t l y removed a t s h o r t d i s t a n c e s ( a s w e l l a s i n F i g . 4 ) ,
4 H i r o s h i MASUDA, Y o s h i o MIMURA, and Y a s u h i s a OMURA
l E 3
﹂
Z '
X ' [ X
Ul UP
g '
. a u U
J p
g m s u g w
27
25
23
2 1
1 9
X2
T h i n l i n e s : w / o f i l t e r B o l d l i n e s : w / m e d i a n f i l t e r
1 7
28 24 20 1 6 1 2
4The h o r i z o n t a l d i s t a n c e b e t w e e n PSDl and upward s t e p [ cm]
F i g . 4 Range d a t a e v o l u t i o n when t h e r o b o t i s a p p r o a c h i n g a n upward s t e p .
0 5
0 0
5 4 4 3 l u 5 l
へ X
︑ [
x
u i u p g~uu1
p g m s u g w
3 5
25 20
T h i n l i n e s : w / o f i l t e r B o l d l i n e s : w / m e d i a n f i l t e r
1 5
28 24 20 1 6 1 2
The h o r i z o n t a l d i s t a n c e b e t w e e n PSDl and downward s l o p e [ c m ]
4
F i g . 5 Range d a t a e v o l u t i o n when t h e r o b o t i s a p p r o a c h i n g a downward s l o p e .
but n o t a t d i s t a n c e s beyond 50 cm. This i s due t o t h e s e n s o r ' s performance l i m i t a t i o n [ 9 ] ; when Xl ( > 50 cm), even a s m a l l v o l t a g e s h i f t o f output s i g 叫 o fs e n s o r r e s u l t s i n a l a r g e v a r i a t i o n i n range d a t a . When t h e a n g l e between t h e I R ‑ l i g h t beam from t h e s e n s o r and t h e o b j e c t s u r f a c e i n c r e a s e s , t h e IR s i g n a l returned a t t e n u a t e s , and t h e i n f l u e n c e o f room l i g h t becomes s i g n i f i c a n t . This means t h a t a downward s l o p e y i e l d s a l a r g e v a r i a t i o n i n d e t e c t e d s i g n a l .
4 . Method of Extracting S p a t i a l Values
I n S e c t i o n 4 . 1 , we d e s c r i b e how t h e r o b o t i d e n t i f i e s s t e p s , s l o p e s , and t r e n c h e s u s i n g t h e
upper and lower s e n s o r s (PSDl and PSD2). S e c t i o n 4 . 2 d e s c r i b e s t h e mathematical model
t h a t t h e r o b o t a p p l i e s t o c a l c u l a t e s t e p h e i g h t , s l o p e a n g l e o r t r e n c h w i d t h . S e c t i o n 4 . 3 d e t a i l s
t h e r e s u l t s o f experiments on t h e r o b o t ' s d e t e r m i n a t i o n o f s t e p h e i g h t , s l o p e a n g l e and t r e n c h
w i d t h .
E x p e r i m e n t a l I n v e s t i g a t i o n o f O b s t a c l e ‑ A v o i d i n g M o b i l e R o b o t s w i t h o u t I m a g e P r o c e s s i n g 5
I n t h i s c h a p t e r , we assume t h a t t h e r o b o t d i r e c t l y f a c e s t h e o b s t a c l e ( t h e w i d t h o f which i s t a k e n t o be e f f e c t i v e l y i n f i n i t e ) . N o t e t h a t a l l t h e r a n g e d a t a ( X l L , XlR, X 2 L , and X2R) d i s p l a y e d i n t h e f i g u r e s a r e t h e r e s u l t o f median f i l t e r i n g . R e s u l t s o b t a i n e d a s s u m i n g more p r a c t i c a l s i t u a t i o n s a r e shown i n S e c t i o n 5 .
4 . 1 How t o c l a s s i f y s l o p e s , s t e p s and t r e n c h e s
F i r s t , we s h o u l d e x p l a i n t h e n o t a t i o n s used i n t h i s s e c t i o n . Xl and X2 s t a n d f o r t h e d i s t a n c e s g i v e n by PSDl and P S D 2 , r e s p e c t i v e l y . When t h e r o b o t r u n s on a f l a t f l o o r , i t i s assumed t h a t PSDl and PSD2 y i e l d d i s t a n c e d a t a Xlo and X 2 o , r e s p e c t i v e l y . I n a p r a c t i c a l s i t u a t i o n , we have t o t a k e a c c o u n t o f n o i s e i n t h e d a t a y i e l d e d by t h e s e n s o r s . A c c o r d i n g l y , we i n t r o d u c e p o s i t i v e t h r e s h o l d v a l u e s o f XlT and X2T t o i m p r o v e t h e d e t e c t i o n r e p r o d u c i b i l i t y o f d i s t a n c e d a t a when d e t e r m i n i n g whether t h e e v e n t ( i . e . , s l o p e , s t e p , o r t r e n c h ) h a s o c c u r r e d . When PSDl o u t p u t s d a t a s a t i s f y i n g t h e c o n d i t i o n of~1-Xlo\<XlT, t h e r o b o t ' t h i n k s ' t h a t h e i s on a f l a t f l o o r . I n t h i s c a s e , we s a y t h a t S ( P S D l ) = " F l a t " . When PSDl o u t p u t s d a t a s a t i s f y i n g t h e c o n d i t i o n of~1-Xlo\> X l T , t h e r o b o t ' e t h i n k s ' t h a t h e may b e f a c i n g a s l o p e , a s t e p , o r a t r e n c h . I n t h i s c a s e , we s a y t h a t S ( P S D l ) = " N O N ‑ F " . I n t h e p r e s e n t e x p e r i m e n t , we e m p i r i c a l l y s e t XlT=0.8 [ c m ] and XlT=0.5 [ c m ] by t a k i n g a c c o u n t o f t h e n o i s e l e v e l shown i n F i g s . 4 and 5 , r e s p e c t i v e l y . For e x a m p l e , when t h e r o b o t i s r u n n i n g on a f l a t f l o o r , t h e " s t a t e s " o u t p u t f r o m t h e 4 s e n s o r s a r e " f l a t " , and we u s e t h e f o l l o w i n g d e s c r i p t i o n s :
S ( P S D l L ) = " F l a t " , S (PSDlR) = " F l a t " , S ( P S D 2 L ) = " F l a t " , S (PSD2R) = " F l a t " .
( 1 ) ( 2 ) ( 3 ) ( 4 ) N e x t , we d e s c r i b e how t h e r o b o t u s e s t h e g e o m e t r i c method shown i n F i g . 6 t o d i f f e r e n t i a t e s l o p e s , s t e p s , and t r e n c h e s .
( a ) F l a t f l o o r
When t h e r o b o t compares t h e r a n g e d a t a t o t h e t h r e s h o l d v a l u e g i v e n i n t h e p r e v i o u s S e c t i o n , and PSDl and PSD2 o u t p u t d a t a s a t i s f y i n g t h e c o n d i t i o n o f S ( P S D l ) ="FLAT" & S
( P S D 2 ) ="FLAT", t h e r o b o t ' t h i n k s ' t h a t he i s on a f l a t f l o o r ( s e e F i g . 6 ( a ) ) . The e q u i v a l e n t m a t h e m a t i c a l r e l a t i o n s h i p c a n be e x p r e s s e d a s
I XI ‑Xlo 区 XlTand I X2 ‑ X 2 o l s ; X 2 T . ( 5 ) ( b ) Downward s t e p
When PSDl and PSD2 o u t p u t d a t a s a t i s f y i n g t h e f o l l o w i n g c o n d i t i o n , t h e r o b o t ' t h i n k s ' t h a t h e i s f a c i n g a downward s t e p ( s e e F i g . 6 ( b ) ) .
Xl ‑Xlo> XlT and X2 ‑ X2o> X2T and 以 1‑ X l o l -~2 ‑ X2ol<X1T + X 2 T . ( 6 ) ( c ) Upward s t e p
When PSDl and PSD2 o u t p u t d a t a s a t i s f y i n g t h e f o l l o w i n g c o n d i t i o n , t h e r o b o t ' t h i n k s ' t h a t
h e i s f a c i n g a n upward s t e p ( s e e F i g . 6 ( c ) ) .
6 H i r o s h i MASUDA, Y o s h i o MIMURA, a n d Y a s u h i s a OMURA
Xl ‑Xl 廷 XlTand X2‑X2 廷 X2Tand~1 ‑ Xlol — ~2-X2o収1T+X2T. ( 7 a ) o r
/ Xl ‑Xlo /~XlT and X2‑X2 咋 X 2 T . ( 7 b ) ( d ) Trench
When PSDI and PSD2 o u t p u t d a t a s a t i s f y i n g t h e f o l l o w i n g c o n d i t i o n , t h e r o b o t ' t h i n k s ' t h a t he i s f a c i n g a t r e n c h ( s e e F i g . 6 ( d ) ) . I n t h i s c a s e , t h e PSD s e n s o r r e c e i v e s t h e I R s i g n a l r e f l e c t e d from t h e s i d e w a l l o f t h e t r e n c h o r t h e I R s i g n a l r e f l e c t e d f r o m t h e b o t t o m o f t h e t r e n c h a s shown i n F i g . 7 ( c ) . The a l g o r i t h m i n i t s s i m p l e p r e s e n t f o r m c a n n o t d i s t i n g u i s h t h e s e two c a s e s .
I Xl ‑ Xlo I~XlT and X2 ‑ X2o>X2T. ( 8 )
( e ) Downward s l o p e
When PSDl and PSD2 o u t p u t d a t a s a t i s f y i n g t h e f o l l o w i n g c o n d i t i o n , t h e r o b o t ' t h i n k s ' t h a t he i s f a c i n g a downward s l o p e ( s e e F i g . 6 ( e ) ) .
( K l ‑Xlol>XlT and ( X 2 ‑X2ol>X2T and ( X l ‑ X l o ) ‑(X2 ‑ X 2 o ) >XlT + X2T ( 9 ) ( f ) Upward s l o p e
When PSDI and PSD2 o u t d a t a s a t i s f y t h e f o l l o w i n g c o n d i t i o n , t h e r o b o t ' t h i n k s ' t h a t i t i s f a c i n g a n upward s l o p e ( s e e F i g . 6 ( f ) ) .
~1 ‑Xlo/>XlT and~2 ‑X2o/>X2T and ( X I ‑ X l o ) ‑(X2‑X2o) <XlT + X 2 T . ( 1 0 )
4 . 2 Equations t o c a l c u l a t e s l o p e a n g l e , s t e p h e i g h t , trench width
S l o p e a n g l e , s t e p h e i g h t and t r e n c h w i d t h c a n b e c a l c u l a t e d from r a n g e d a t a ( X l , X 2 ) . F i g . 7 i l l u s t r a t e s t h e g e o m e t r i c t e c h n i q u e s u s e d .
( a ) S t e p h e i g h t
S t e p h e i g h t h l i s c a l c u l a t e d u s i n g E q . ( 1 1 ) . A d i a g r a m i s shown i n F i g . 7 ( a ) .
h l = ( X 2 o ‑ X2) s i n a , ( 1 1 ) where a i s t h e a n g l e o f s e n s o r s i g n a l a g a i n s t a f l a t f l o o r ( h e r e , a= 4 5 d e g . ) . When h l < 0 , a downward s t e p i s s u g g e s t e d , and when hl > 0 , a n upward s t e p i s s u g g e s t e d .
( b ) S l o p e a n g l e
S l o p e a n g l e 0 i s c a l c u l a t e d u s i n g E q . ( 1 2 ) . A d i a g r a m i s shown i n F i g . 7 ( b ) .
0 = p / 2 ‑a ‑t a n ‑ 1 ( ( X l ‑ X 2 ) I L ) . ( 1 2 )
When0 < 0 , a downward s l o p e i s s u g g e s t e d , and when0 > 0 , a n upward s l o p e i s s u g g e s t e d .
( c ) Trench w i d t h
E x p e r i m e n t a l I n v e s t i g a t i o n o f O b s t a c l e ‑ A v o i d i n g M o b i l e R o b o t s w i t h o u t Image P r o c e s s i n g 7
二
~1-Xl o l SXJ T &~2-X2ol SX2T
( a ) F l a t f l o o r
XI‑XI こ 互 XJT&X2
ぷ2 砂 X2T
&叩ぷJoi—⑫X孤<XIT+X2T
Xl‑Xlo>XJT &X2‑X2o>X2T 二
& 叩 ‑ X l o 隅 2 ‑ X 2 o l
くXJT+X2T ( b ) Downward s t e p
¥ X l ‑ X 二 l o l
虹XJT& X2‑X2o : = : : ‑ x 2 r ( c ) Upward s t e p
こ 叩 ぷl 心 XJT& X2‑X2o> こ X2T ( d ) T r e n c h
~1-Xlol>XJT &~2-X2ol>X2T こ
& ( X J ‑ X l o ) ‑ ( X
虹2o)>XJT+X2T ( e ) Downward s l o p e
こ
¥ X l ‑ X l o l > X J T & ¥ X 2 ‑ X 2 o l > X 2 T
& ( X l ‑ X l o ) ‑ ( X 2 ‑ X 2 o )
くXJT+X2T ( f ) Upward s l o p e
F i g . 6 How t o c l a s s i f y s l o p e s , s t e p s and t r e n c h e s .
( a ) S t e p
M a t h e m a t i c a l a l g o r i t h m s a r e s h o w n .
‑‑‑―↑―‑‑‑‑
( c ) T r e n c h
( b ) S l o p e
:~ ~:
,
h2•
F i g . 7 How t o c l a s s i f y s l o p e s , s t e p s and t r e n c h e s .
The c h a r a c t e r i s t i c p a r a m e t e r e x t r a c t i o n method i s s h o w n .
8 H i r o s h i MASUDA, Y o s h i o MIMURA, a n d Y a s u h i s a OMURA
When t h e r o b o t f a c e s a t r e n c h , s e n s o r o u t p u t may b e o n e o f two c a s e s ; ( i ) t h e s e n s o r s i g n a l i s r e f l e c t e d f r o m t h e b o t t o m o f t h e t r e n c h , ( i i ) t h e s e n s o r s i g n a l i s r e f l e c t e d f r o m a s i d e w a l l o f t h e t r e n c h . I n i t i a l l y , t h e r o b o t c a n n o t j u d g e which i s c o r r e c t . Our s o l u t i o n i s t o f o r c e t h e r o b o t t o c a l c u l a t e two d i m e n s i o n s , t r e n c h d e p t h and t r e n c h w i d t h . Trench d e p t h h l i s c a l c u l a t e d u s i n g t h e f o l l o w i n g e q u a t i o n :
h l = ( X 2 o ‑ X2) s i n a . ( 1 3 ) Trench w i d t h h2 i s c a l c u l a t e d w i t h t h e n e x t e q u a t i o n :
h2 = ( X 2 o ‑ X 2 ) c o s a . ( 1 4 ) S i n c e a l l s e n s o r s a r e p o s i t i o n e d s o t h a t t h e i r s u r f a c e s a r e a n g l e d a t 4 5 ° a g a i n s t a f l a t f l o o r , t h e c a l c u l a t e d v a l u e s o f h l a n d h2 a r e i d e n t i c a l . When t h e r o b o t a p p r o a c h e s t h e t r e n c h , i t ' s judgment o f whether o r n o t i t c a n c r o s s t h e t r e n c h d e p e n d s o n t h e d i a m e t e r ( D w ) o f t h e r o b o t ' s w h e e l s . C o n s i d e r c a s e ( i ) . When Dw i s much l a r g e r t h a n t h e t r e n c h d e p t h , t h e r o b o t may b e a b l e t o c r o s s t h e t r e n c h . C o n s i d e r c a s e ( i i ) . When Dw i s much l a r g e r t h a n t h e t r e n c h w i d t h , t h e r o b o t c a n g o o v e r t h e t r e n c h . T h e r e f o r e , t h e r o b o t c a n p a s s t h r o u g h t h e t r e n c h i n b o t h c a s e s , ( i ) and ( i i ) , when h l o r h2 i s much s m a l l e r t h a n D w . I n o t h e r w o r d s , i t i s n o t n e c e s s a r y f o r u s t o d i s t i n g u i s h c a s e s ( i ) and ( i i ) ; we c a n a p p l y E q . ( 1 3 ) t o d e c i d e whether t h e r o b o t c a n g o f o r w a r d o r n o t when t h e r o b o t d e t e c t s a t r e n c h .
I n p r a c t i c a l a p p l i c a t i o n s , i t i s n o t a l w a y s p o s s i b l e t o d e r i v e p r e c i s e c h a r a c t e r i s t i c v a l u e s i n o r d e r t o u s e t h e a b o v e e q u a t i o n s b e c a u s e o f v a r i o u s n o i s e s ( i n c l u d i n g e x t e r n a l d i s t u r b a n c e ) a n d / o r s p a t i a l d i s p e r s i o n o f t h e e m i t t e d I R s i g n a l . T h i s s u g g e s t s t h e need f o r a n a d d i t i o n a l method t o g u a r a n t e e t h e a c c u r a c y o f t h e c h a r a c t e r i s t i c v a l u e s and judgment r e l i a b i l i t y ; d e t a i l s w i l l b e g i v e n i n S e c t i o n 5 b e l o w .
4 . 3 Measurement r e s u l t s : s t e p h e i g h t , s l o p e a n g l e , and trench width
Measurement r e s u l t s o f s t e p h e i g h t f o r which t h e r o b o t s h o u l d s t o p i n f r o n t o f t h e s t e p a r e summarized i n T a b l e I . 1 0 0 0 s e n s i n g t r i a l s were a v e r a g e d i n e a c h e v e n t o f o b s t a c l e d i s c o v e r y and t h e m e d i a l f i l t e r number ( N l ) was 5 . As i s e v i d e n t i n T a b l e I , t h e v a r i a t i o n o f e v a l u a t e d s t e p h e i g h t h l i s v e r y s m a l l ; t h e d i f f e r e n c e between t h e maximal v a l u e and t h e m i n i m a l v a l u e i s a b o u t 3 m m f o r t h e upward s t e p and a b o u t 6 m m f o r t h e downward s t e p . We c a n s e e t h a t t h e p r e s e n t e v a l u a t i o n t e c h n i q u e d o e s n o t a l w a y s y i e l d a c c u r a t e d a t a .
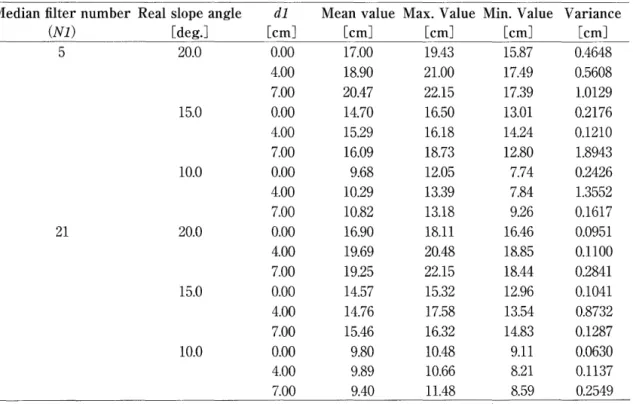
Measurement r e s u l t s o f upward s l o p e a n g l e ( 0 ) a r e shown i n T a b l e I I . 1 0 0 0 s e n s i n g t r i a l s
were a v e r a g e d i n e a c h e v e n t o f o b s t a c l e d i s c o v e r y and t h e m e d i a l f i l t e r number was 5 o r 2 1 .
I n t h e e x p e r i m e n t , we assumed 3 c a s e s o f h o r i z o n t a l d i s t a n c e ( d l ) between t h e f r o n t e d g e
o f t h e r o b o t and t h e boundary o f t h e f l a t f l o o r and t h e s l o p e O c m , 4 c m , and 7 c m . The s l o p e
a n g l e s were 2 0 d e g . , 1 5 d e g . and 1 0 d e g . I t c a n b e s e e n f r o m T a b l e I I t h a t t h e a v e r a g e d v a l u e
o f 0 i n c r e a s e s w i t h d l . I n t h i s s t u d y , t h e s l o p e a n g l e e v a l u a t i o n a l g o r i t h m d o e s n o t e s t i m a t e
d i s t a n c e d l , and s o t h e r o b o t e s t i m a t e s c h a r a c t e r i s t i c v a l u e s w i t h o u t s t o p p i n g a s i t a p p r o a c h e s
t h e o b s t a c l e , r e s u l t i n g i n a s l i g h t d r o p i n a c c u r a c y . I t i s a l s o e v i d e n t from T a b l e I I t h a t a
l a r g e Nl v a l u e r e d u c e s t h e v a r i a t i o n i n e s t i m a t e d v a l u e s , a l t h o u g h a l a r g e Nl v a l u e r e s u l t s i n
a l o n g e r t i m e b e f o r e j u d g m e n t . I n a d d i t i o n , we n o t e t h a t f o r Nl = 2 1 , t h e d i f f e r e n c e between
Experimental I n v e s t i g a t i o n o f O b s t a c l e ‑ A v o i d i n g M o b i l e R o b o t s w i t h o u t Image P r o c e s s i n g 9
Table I . S t e p h e i g h t e v a l u a t i o n r e s u l t s i n u n i t s o f c m . 1 0 0 0 s e n s i n g t r i a l s a r e a v e r a g e d . The m e d i a l f i l t e r number ( N I ) i s 5 . The r e a l s t e p h e i g h t ( h l ) i s 1 . 3 0 c m .
Upward s t e p h e i g h t [ c m ] Downward s t e p h e i g h t [ c m ] Mean v a l u e 1 . 3 0 ‑ 1 . 3 3
Max. v a l u e 1 . 4 5 ‑ 1 . 0 0 M i n . v a l u e 1 . 1 8 ‑ 1 . 5 6 V a r i a n c e 0 . 0 0 5 7 0 . 0 0 1 9
Table I L Upward s l o p e a n g l e e v a l u a t i o n r e s u l t s i n u n i t s o f cm. 1 0 0 0 s e n s i n g t r i a l s a r e a v e r a g e d . The m e d i a l f i l t e r number ( N I ) i s 5 o r 2 1 .
Median f i l t e r number Real s l o p e a n g l e d l Mean v a l u e Max. Value M i n . Value Variance ( N I ) [ d e g . ] [cm] [cm] [ c m ] [ c m ] [cm]
5 2 0 . 0 0 . 0 0 1 7 . 0 0 1 9 . 4 3 1 5 . 8 7 0 . 4 6 4 8 4 . 0 0 1 8 . 9 0 2 1 . 0 0 1 7 . 4 9 0 . 5 6 0 8 7 . 0 0 2 0 . 4 7 2 2 . 1 5 1 7 . 3 9 1 . 0 1 2 9 1 5 . 0 0 . 0 0 1 4 . 7 0 1 6 . 5 0 1 3 . 0 1 0 . 2 1 7 6 4 . 0 0 1 5 . 2 9 1 6 . 1 8 1 4 . 2 4 0 . 1 2 1 0 7 . 0 0 1 6 . 0 9 1 8 . 7 3 1 2 . 8 0 1 . 8 9 4 3 1 0 . 0 0 . 0 0 9 . 6 8 1 2 . 0 5 7 . 7 4 0 . 2 4 2 6 4 . 0 0 1 0 . 2 9 1 3 . 3 9 7 . 8 4 1 . 3 5 5 2 7 . 0 0 1 0 . 8 2 1 3 . 1 8 9 . 2 6 0 . 1 6 1 7 2 1 2 0 . 0 0 . 0 0 1 6 . 9 0 1 8 . 1 1 1 6 . 4 6 0 . 0 9 5 1 4 . 0 0 1 9 . 6 9 2 0 . 4 8 1 8 . 8 5 0 . 1 1 0 0 7 . 0 0 1 9 . 2 5 2 2 . 1 5 1 8 . 4 4 0 . 2 8 4 1 1 5 . 0 0 . 0 0 1 4 . 5 7 1 5 . 3 2 1 2 . 9 6 0 . 1 0 4 1 4 . 0 0 1 4 . 7 6 1 7 . 5 8 1 3 . 5 4 0 . 8 7 3 2 7 . 0 0 1 5 . 4 6 1 6 . 3 2 1 4 . 8 3 0 . 1 2 8 7 1 0 . 0 0 . 0 0 9 . 8 0 1 0 . 4 8 9 . 1 1 0 . 0 6 3 0 4 . 0 0 9 . 8 9 1 0 . 6 6 8 . 2 1 0 . 1 1 3 7 7 . 0 0 9 . 4 0 1 1 . 4 8 8 . 5 9 0 . 2 5 4 9
Table I I I . Downward s l o p e a n g l e e v a l u a t i o n r e s u l t s i n u n i t s o f c m . 1 0 0 0 s e n s i n g t r i a l s a r e a v e r a g e d . The m e d i a l f i l t e r number ( N I ) i s 2 1 .
Real s l o p e a n g l e dl Mean v a l u e Max. v a l u e M i n . v a l u e Variance [ d e g . ] [cm] [cm] [cm] [ c m ] [ c m ]
‑ 2 0 . 0 1 0 . 0 0 ‑ 1 9 . 9 1 ‑ 1 3 . 7 2 ‑ 2 3 . 2 3 2 . 0 6 1 9 5 . 0 0 ‑ 1 8 . 9 0 ‑ 1 0 . 4 2 ‑ 2 5 . 4 1 7 . 6 8 7 5 2 . 0 0 ‑ 1 8 . 3 7 ‑ 1 0 . 3 5 ‑ 2 7 . 1 6 1 0 . 2 6 4 2
‑ 1 5 . 0 1 0 . 0 0 ‑ 1 4 . 5 6 ‑ 1 0 . 1 2 ‑ 1 8 . 0 2 1 . 4 0 9 6 5 . 0 0 ‑ 1 4 . 2 3 ‑ 1 0 . 0 2 ‑ 2 1 . 7 0 3 . 7 5 9 4 2 . 0 0 ‑ 1 4 . 4 6 ‑ 1 0 . 0 4 ‑ 1 9 . 7 6 4 . 3 5 3 7
‑ 1 0 . 0 1 0 . 0 0 ‑ 1 0 . 5 8 ‑ 7 . 5 5 ‑ 1 3 . 6 6 1 . 4 4 9 9
5 . 0 0 NA NA NA NA
2 . 0 0 NA NA NA NA
1 0 H i r o s h i MASUDA, Y o s h i o MIMURA, a n d Y a s u h i s a OMURA
t h e maximal v a l u e and t h e m i n i m a l v a l u e i s n o t a l w a y s r e d u c e d .
T a b l e I I I shows measurement r e s u l t s o f downward s l o p e a n g l e . As i s e v i d e n t i n T a b l e I I I , t h e v a r i a t i o n o f measurement r e s u l t s i s v e r y l a r g e i n c o n t r a s t t o t h e upward s l o p e v a l u e s . T h i s s u g g e s t s a need t o improve judgment r e l i a b i l i t y f o r p r a c t i c a l a p p l i c a t i o n s .
5 . Dynamic D e t e c t i o n o f O b s t a c l e s i n a Test Road
I n s e c t i o n s 5 . 1 t o 5 . 4 , we d e s c r i b e a n a l g o r i t h m t o b e u s e d i n p r a c t i c a l s i t u a t i o n s . S e c t i o n 5 . 5 d e t a i l s t h e a c c u r a c y o f s e v e r a l e v a l u a t i o n s .
5 . 1 L o g i c a l Flow
A s c h e m a t i c f l o w showing how t h e r o b o t a v o i d s o b s t a c l e s i s shown i n F i g . 8 . F i r s t , when t h e l e f t o r t h e r i g h t s e n s o r s t a t e " N O N ‑ F " , t h e r o b o t c h a n g e s i t ' s p o s i t i o n s o t h a t t h e f r o n t e d g e o f t h e r o b o t r e m a i n s p a r a l l e l t o t h e b o r d e r l i n e o f t h e o b s t a c l e and t h e f l a t f l o o r . N e x t , t h e r o b o t a p p r o a c h e s t h e b o r d e r l i n e , a g a i n d e t e c t s s i g n a l s from t h e o b s t a c l e , and s u b s e q u e n t l y c o n c l u d e s whether t h e o b s t a c l e f a c i n g i t i s a s l o p e , s t e p o r t r e n c h . F i n a l l y , when t h e r o b o t r e c o g n i z e s t h a t t h e o b s t a c l e i s a s t e p , i t c a l c u l a t e s t h e t e n t a t i v e s t e p h e i g h t , compares t h e c a l c u l a t e d v a l u e t o t h e t h r e s h o l d v a l u e , and t h e n c o n c l u d e s whether i t h a s t o a v o i d t h e o b s t a c l e o r n o t . When t h e r o b o t d e t e c t s a s l o p e o r a t r e n c h , t h e r o b o t t r a c e s t h e same l o g i c a l f l o w . As j u s t d e s c r i b e d , i n o r d e r t o c l a s s i f y t h e o b s t a c l e s u c c e s s f u l l y and t o g e t r e l i a b l e c h a r a c t e r i s t i c v a l u e s , t h e c a u s e s o f e r r o r s i n d e t e c t i n g t h e s i g n a l s f r o m t h e o b s t a c l e must b e a n a l y z e d .
S(PSD2L) = "NON‑F"
o r
S(PSD2R) = "NON‑F"
! R e c o g n i t i o n o f o b s t a c l e s
C a l c u l a t i o n o f a c h a r a c t e r i s t i c v a l u e J u d g m e n t w h e t h e r r o b o t w i l l a v o i d t h e o b s t a c l e o r n o t
F i g . 8 A l g o r i t h m f o r t h e r o b o t i n o r d e r t o d e t e c t a n o b s t a c l e a n d a v o i d i t .
5 . 2 Aligning t h e r o b o t t o t h e o b s t a c l e
I n t h i s s e c t i o n , we d e s c r i b e how t h e r o b o t p o s i t i o n s h i m s e l f i n t h e v i c i n i t y o f t h e o b s t a c l e . For a l l o b s t a c l e s , t o maximize d e t e c t i o n a c c u r a c y , t h e r o b o t s h o u l d d i r e c t l y f a c e t h e o b s t a c l e . T h i s p r o c e s s i s d e t a i l e d b e l o w ( s e e F i g . 9 ) .
( 1 ) F i r s t , t h e r o b o t a p p r o a c h e s t h e o b s t a c l e , r e c e i v e s r a n g e d a t a , and e x a m i n e s whether t h e
E x p e r i m e n t a l I n v e s t i g a t i o n o f O b s t a c l e ‑ A v o i d i n g M o b i l e R o b o t s w i t h o u t I m a g e P r o c e s s i n g 1 1
S(PSD2L)='NON‑F"
&
S(PSD2R)=''FLAT"
S(PSD2L)='NON‑F"
&
S(PSD2R)='NON‑F"
S(PSD2L)=''FLAT"
&