ENAA2008-プA(Ⅱ)
平成20年度
エコ・ヒューマン・エンジニアリング に関する調査研究報告書
その 2
ヒューマン領域 および エコ/ヒューマン融合領域
平成21年3月
財団法人 エンジニアリング振興協会
この事業は、競輪の補助金を受けて 実施したものです。
http://ringring-keirin.jp/
序
本報告書は、財団法人JKAより機械工業振興資金の補助を受け、財団法人エンジニアリ ング振興協会 研究開発企画委員会の平成20年度事業として、調査研究を行った成果を取り まとめたものであります。
我が国の経済は、2007 年夏以降、サブプライムローン問題に端を発した海外経済の減速、
エネルギー・原材料価格の高騰などの影響によって企業の収益環境が悪化し、さらに 2008 年 9 月の米国大手証券会社リーマン・ブラザーズの破綻で金融危機が全世界に広がり、世界 的な同時不況が進行する中で株安や円高、外需の減退が国内企業の業績を圧迫して生産・設 備投資活動が後退しています。
このような中、エンジニアリング産業においても、アジア企業、欧米企業との競争の激化 はさけられず、なお一層の差別化による競争力の強化のためには、技術分野での優位性の確 保が必要であり、こうした傾向を定着させて将来のさらなる発展につなげるためには、当産 業における技術面の取り組みがますます重要となっています。
当協会は、創立以来、研究開発企画委員会を設置し、今日的な社会的諸問題の解決、将来 の望ましい社会システムの構築等に資することを目的として、公共的かつ先導的・共通基盤 的な課題等について幅広く産・学・官の英知を結集して新技術・各種システムに関する調査 研究を実施しております。
平成20年度は、これまでの成果の蓄積等を踏まえながら、「エコ・ヒューマン・エンジニ アリングに関する調査研究」に取り組みました。調査の実施にあたっては、当協会財団本部 の常設委員会組織である「研究開発企画委員会」の「循環型社会システム研究部会」、「エネ ルギー・環境研究部会」、「都市・地域研究部会」、「新産業研究部会」及び地下開発利用研究 センターの常設委員会組織である「研究企画委員会」の「調査専門部会」が中心となって、
特に社会的ニーズが高いサブテーマについて調査を行い、その結果を報告書として取りまと めました。
これらの成果がわが国エンジニアリング業界の競争力強化のために多少とも示唆、指針を 与えることができれば望外の喜びであります。
最後に本調査研究にご協力いただいた関係各位に対し心から謝意を表します。
平成21年3月
財団法人エンジニアリング振興協会 会 長 増 田 信 行
平成 20 年度
エコ・ヒューマン・エンジニアリングに関する調査研究 構 成
エコ領域
第Ⅰ部 カーボンニュートラルなバイオマス燃料
(担当:循環型社会システム研究部会 WG1)
第Ⅱ部 廃棄物輸送・収集運搬の効率化
(担当:循環型社会システム研究部会 WG2)
第Ⅲ部 資源安全保障としてのレアメタルリサイクル
(担当:循環型社会システム研究部会 WG3)
第Ⅳ部 炭素循環系としてのバイオマスの保全経営と機能拡張
(担当:エネルギー・環境研究部会 WG1)
第Ⅴ部 都市域の地下水・再生水を活用するCO2削減対策に関する調査
(担当:地下利用推進部会 第3専門部会)
ヒューマン領域
少子高齢化対策および安全・安心社会のための RT(ロボット技術)
の利活用
(担当:新産業研究部会)
エコ/ヒューマン融合領域
第Ⅰ部 ポスト京都議定書および将来の食料・水不足への対応方策
(担当:エネルギー・環境研究部会 WG2)
第Ⅱ部 都市・地域における水対策と災害時のライフライン確保
(担当:都市・地域研究部会)
第Ⅲ部 地下の優位性を活かした新たな利活用方法を探索する調査
(担当:地下利用推進部会 第1専門部会)
第Ⅳ部 地上の景観を保全するための地下利用に関する調査
(担当:地下利用推進部会 第2専門部会)
第Ⅴ部 大深度地下インフラ施設の可能性に関する調査
(担当:地下利用推進部会 第4専門部会)
青い紙
ヒューマン領域
少子高齢化対策および安全・安心社会のための RT
(ロボット技術)の利活用
ヒューマン領域
少子高齢化対策および安全・安心社会のためのRT(ロボット技術)の利活用
目 次
新産業研究部会名簿
第1章 はじめに ··· 1
1.1 調査研究の背景と目的 ··· 1
1.2 調査研究の経緯 ··· 1
第2章 行政側の動向と取り組み ··· 3
2.1 国のRT施策動向 ··· 3
2.1.1 内閣府の施策動向 ··· 4
2.1.2 総務省の施策動向 ··· 5
2.1.3 文部科学省の施策動向 ··· 5
2.1.4 農林水産省の施策動向 ··· 6
2.1.5 経済産業省の施策動向 ··· 6
2.1.6 国土交通省の施策動向 ··· 7
2.1.7 防衛省の施策動向 ··· 8
2.2 海外のRT利活用動向 ··· 8
2.2.1 米国におけるRTの開発動向 ··· 9
2.2.2 欧州におけるRTの開発動向 ··· 13
2.2.3 日本、米国、欧州におけるロボット開発の比較 ··· 16
第3章 最新技術動向 ··· 18
3.1 技術マップ ··· 18
3.1.1 ロボット及びRTの概念整理 ··· 18
3.1.2 技術マップ ··· 19
3.1.3 技術ロードマップ ··· 21
3.2 技術動向 ··· 24
3.2.1 産業用ロボット ··· 24
3.2.2 医療関連ロボット ··· 25
3.2.3 サービス・作業支援分野ロボット ··· 28
3.2.4 福祉・介護支援ロボット ··· 30
3.2.5 公共・災害支援ロボット ··· 35
3.2.6 無人化建設ロボット ··· 40
第4章 現地調査・事例紹介 ··· 43
4.1 北海道における少子高齢化対策の事例紹介 ··· 43
4.2 北海道大学大学院情報科学研究科システム制御情報科学研究室の取り組み ··· 43
4.3 北海道立工業試験場の取り組み ··· 45
4.4 セコム㈱の取り組み ··· 49
第5章 RTを用いたサービスの視点 ··· 51
5.1 課題の抽出 ··· 51
5.1.1 現在のロボット産業 ··· 51
5.1.2 ロボットを用いたサービスに関する課題 ··· 53
5.2 RTを用いたサービスの方向性 ··· 54
5.2.1 他業界からの取り組み例 ··· 54
5.2.2 エンジニアリング企業の取り組みの方向性 ··· 56
第6章 おわりに ··· 59
6.1 本報告書のまとめ ··· 59
6.2 おわりに ··· 59
参考文献 ··· 60
新産業研究部会名簿
委員名 企業名 所属・役職
部会長 小坂 順一 鹿島建設㈱
研究・技術開発本部
技術研究所 研究管理グループ 研究員(専任職)
主 査 小林 信郷 大成建設㈱ 設計本部 設備計画グループ プロジェクトリーダー
副主査 浜田 耕史 ㈱大林組
技術研究所
建築生産システム研究室
情報化生産グループ・グループ長
後久 卓哉 東急建設㈱ 技術研究所 メカトログループ 主任研究員
西牧 晋志 西松建設㈱ 技術管理部
技術管理課 係長
中村孝太郎 ㈱NTT データウェーブ 技術支援部 主席研究員
近藤 正芳 ㈱竹中工務店
技術研究所 先端技術研究部 マテリアルエンジニアリング部門 研究主任
清水 敬一 三井住友建設㈱
設計本部
設計品質管理部品質管理グループ チーフアーキテクト
事務局 佐藤 誠一 ㈶エンジニアリング振興協会 技術部 研究主幹
第1章 はじめに
1.1 調査研究の背景と目的
1) 調査研究の背景
わが国では少子高齢化が進行し、人口が減少するとともに、企業などでは、労働力不足が深刻の 度を増している。さらに、高齢社会において、安全・安心な環境構築への対応が求められている。
これまで製造業においては、労働力不足対策や業務の効率化を目指し工場の生産ラインに産業用 ロボットを積極的に導入し、今日では産業用ロボット分野において、わが国のロボット技術(以下、
「RT」という)は国際的にもトップレベルの技術を蓄積している。
少子高齢化や安心・安全の問題が急速に進行しつつある中、RT を製造業以外も含む様々な分野 で活用することが期待されている。具体的には、前述した労働力不足や要介護者の増加などの課題 を解決するとともに、犯罪、災害や医療等における将来への不安の軽減による安心で安全な社会を 実現する手段として、RTが注目され、かつ実用化への開発が急務となっている。
2) 調査の目的と概要
<目的>
少子高齢化対応および安全・安心社会確立に向けて、RT によるエンジニアリングの推進や仕組 み作り等の技術的解決策を検討することを目的とする。
<調査研究概要>
① RT 分野における国や地方自治体といった行政側の施策を調査し、今後のさらなる利活用お よび普及のために、技術的支援策等を検討する。
② 各分野(産業)別の最新技術動向を調査し、RT が積極的に導入されている分野と浸透してい ない分野を技術マップに整理し、各分野別に抱える問題点を抽出する。
③ 最新技術動向を具体的に把握するため、最新RTを導入している施設を現地調査しRTを用 いた現状サービスの課題抽出と今後の方向性を見極める。
④ RTを活かした新しい労働力の創出およびRT を用いた新しい安全・安心サービスビジネス 構築等に関する可能性調査を行う。
1.2 調査研究の経緯
1) 調査の方向と手順
調査は、【図 1.2-1】に示すフローに従い進めることにした。
① 1年目は RT 関連の行政側の取り組みや最新技術動向の調査を主体的に行った。また、RT 利活用において現状の問題点の抽出と今後の方向性について検討した。
【RT の主な最新技術動向の調査】
② 調査する対象は、RT の利活用による少子高齢化や安心・安全性向上などに繋がる要素技術 を中心とし、今後の新たなRTシステムの展開やビジネスに発展すると推察されるものも対 象とした。
3) 調査の経過実績
表 1.1-1に、調査実績を示す。
日程 内容
2008 年 6 月 27 日 第1回部会 WG サービス生産性協議会について(報告) 7 月 30 日 第2回部会 WG ROBO_JAPAN2008 について(報告) 8 月 20 日 第3回部会 WG 各分野でのロボットの利活用(報告) 9 月 16 日 第4回部会 WG 産業用 RT ,福祉介護支援 RT (報告) 10 月 2 日 セコム㈱開発センター訪問調査
10 月 21 日 第5回部会 WG セコム・産総研フェア(報告) 11 月 19 日 第6回部会 WG 報告書方針検討
12 月 1 日 現地調査 北海道大学大学院 情報科学研究科 12 月 2 日 現地調査 北海道立工業試験場
12 月 2 日 第7回 WG 報告書構成案 2009 年 1 月 15 日 第8回 WG 報告書1次原稿確認
2 月 4 日 第9回 WG 報告書2次原稿確認
2 月 4 日 講演 日刊工業新聞社 ロボット専門サイト編集部 (最終原稿の最終調整・校正)
3 月 17 日 第 10 回 WG 最終報告書の確認
【図 1.2-1】調査研究フロー
(ⅱ)最新技術動向 技術マップの作成
各分野(産業)別の技術動向 (ⅰ)行政側の動向と取組み 国の RT 施策動向
地方自治体の RT 利活用動向 海外の RT 利活用動向
(ⅲ)最新技術の現地調査 事例の調査
事例の分析
(ⅳ)RT を用いたサービス サービスにおける課題の抽出 今後の方向性の検討
表 1.1-1 調査実績
第2章 行政側の動向と取り組み
この章では、本調査研究の主テーマである少子高齢化対策および安全・安心社会のためのRT利活 用の視点から、政府の政策および活動動向を調査し、現状の把握と今後の展望を行う。
2.1 国の RT 施策動向
政府による近年のRTの利活用に関する政策的位置付けは、表 2.1-1のとおりであり国として RT 開発を行い活用していく方針であることがわかる。
年月 内 容
2007 年6月 ○イノベーション 25(閣議決定)
「早期に取り組むべき課題」において、ロボットについて記載。
2008 年1月
○福田総理施政方針演説 (技術革新の加速)
また、IT を活かしたユビキタス技術や RT を一層活用して、高齢者や障害者が暮 らしやすい社会づくりを進めてまいります。
2008 年5月 ○革新的技術戦略(総合科学技術会議)
「生活支援ロボット技術」として記載。
2008 年5月
○社会還元加速プロジェクトロードマップ(総合科学技術会議有識者議員)
「高齢者・有病者・障害者への先進的な在宅医療・介護の実現」の中で RT の活用 を位置付け
2008 年6月
○骨太 2008(閣議決定)
・「革新的技術創造戦略」において、RT の一層の活用について記載。
・「健康現役社会への挑戦」において、「高齢者等を支援するロボット技術の開 発を進める」と記載。
2008 年6月
○経済成長戦略大綱
(第1.国際競争力の強化1.我が国の国際競争力の強化(2)世界の潜在需要を喚 起する新産業群の創出)
また、iPS 細胞やロボット、高度道路交通システム(ITS)、電子デバイス(MEMS 等)、
超電導など(中略)、我が国が特に優位性を有する技術の果実を、できる限り早期 に社会へと還元するため、積極的な実証や環境整備を行う。
2008 年9月
○新経済成長戦略フォローアップと改訂(閣議決定)
「第1編Ⅰ. 第2章第2節世界のイノベーションセンター」及び「第2編Ⅲ. 3.
サービス産業の活性化に向けた新たな展開」において、生活支援ロボットの技術 開発、安全基準・ルールの整備について記載。
表 2.1-1 国の RT 施策動向
また、2004年度までは、各省庁独自にRT開発を行っていたが、2005年度以降、国家予算の見直 し・削減から各RTが共通して利用する基盤・インフラ技術に関しては、内閣府主導で行う体制に変 更された。ここでは、全体を取りまとめる内閣府の施策動向と各省庁独自のRT開発について動向を 述べる。
2.1.1 内閣府の施策動向
内閣府は、「平成17年度科学技術関係予算の改革について」(2004年7月23日総合科学技術会議 決定)に基づき、国家的・社会的に重要であって関係府省の連携の下に推進すべきテーマを定め、関 連施策等の不必要な重複を排除し連携を強化して積極的に推進することを決定している。各府省の縦 割りの施策に横串を通す観点から、科学技術連携施策群(以下「連携施策群」という。)について、総 合科学技術会議のイニシアティブの下にコーディネータ等を配置し各施策間の調整を推進している。
その上で補完的に実施すべき研究開発課題について、内容・達成目標等を具体的に設定し、研究開発 を推進している。取りまとめに関しては、独立行政法人科学技術振興機構が行っている。
連携施策群の中に、次世代ロボット連携群が設定されている。連携群では、政府各府省が推進する ロボット研究開発を加速すると同時に、中核ミッションとして様々なロボットビジネスの発掘を可能 にするための基盤・インフラ技術である「次世代ロボット共通プラットフォーム技術」を、社会に提 供する活動を展開している。本活動は、ロボットに関する研究開発を実施している文部科学省,総務 省,農林水産省,経済産業省,国土交通省が連携して行っている。
次世代ロボット連携群では、各府省、研究機関などで共通に使えるロボット基盤・インフラ技術と して共通プラットフォーム技術の研究開発に着手している。特に「環境情報の構造化」として、屋内、
屋外など環境内での、ロボットや人、物体の位置計測技術、機器間の通信技術、ロボットサービスア プリケーションが研究開発されるとともに、プラットフォーム環境が、福岡、関西けいはんな、神奈 川に2008年度、2009年度に順次公開される予定となっている。各研究機関や研究開発者が、このよ うな技術や環境を利用していくことで、ロボット開発の効率向上、国際競争力の強化が図れると考え られている。
また、長期的には、2025 年までを視野に入れたイノベーションの創造のための長期的な戦略指針
「イノベーション25」が2007年6月1日閣議決定されている。イノベーション25では、「日本、世 界のこれからの 20 年を推測すると、世界の主要国に対し、日本のような人口減少国家に残された唯 一の持続可能な経済発展の手段は、生産性の向上、つまりイノベーションにある」とされており、2025 年の日本の姿が表 2.1.1-1のように示されている。この中には、高度介護ロボットや、生活支援ロボ ットなどの内容が盛り込まれている。
2.1.2 総務省の施策動向
総務省管轄では、消防庁で消防隊員の危険で過酷な任務を手助けすることを目的に、ロボットの開 発を行い実際に現場で使用している。
東京消防庁の最新ロボット「デュアルファイター」(導入2007年3月)は、完全に無人で遠隔操縦 する放水車の「ドラゴン」と、人による搭乗運転と遠隔操縦の両方が可能な障害物除去車「セーバー」
からなる。ドラゴンは、「今年のロボット」大賞2007で、「公共・フロンティアロボット部門」を受 賞している。
本年度(2008年度)12月には、ロボットではないが新たに、双腕型の重機も導入され、すでに実際 の火災現場で活躍している。
過去には、検知・探査型災害対策用ロボットや火災現場で発生する濃煙、熱気、有毒ガスや、二酸 化炭素消火設備が作動したなどの場合、消防隊員が災害現場に入れない際に残存する要救助者の救助 活動を目的に造られた救助ロボットの「ロボキュー」(1993年導入)などがある。
2.1.3 文部科学省の施策動向
文部科学省は、「地域科学振興施策、知的クラスター創出事業」の一部で RT に関する研究開発を 行っている。
「知的クラスター」とは、地域のイニシアティブの下で、地域において独自の研究開発テーマとポ テンシャルを有する大学をはじめとした公的研究機関等を核とし、地域内外から企業等も参画して構 成される技術革新システムをいい、2001年3月に閣議決定された第2期科学技術基本計画において、
地域における「知的クラスター」の形成の促進が位置付けられたものである。
その一例として、けいはんなヒューマン・エルキューブにおいて開発された「ロボットマニピュレ ータの可変インピーダンスの制御法」を移動機能を有するマニピュレータに拡張する「人間協調型自 立支援RT家電の実用化開発」がある。この開発は、人間と協調して動作し、特に家事・介護におい て力の補助をするロボットを開発する。応答速度の高い移動台車に、ものを把持するハンド部と、そ
表 2.1.1-1 世界のモデルとなる 2025 年の日本の姿
出典:内閣府 http://www.cao.go.jp/innovation/index.html
1.生涯健康な社会
・睡眠時等の常時健康診断や生活習慣の改善を通 じた予防医療が個人レベルで実施可能
・再生医療技術、高度介護ロボット、対認知症特効 薬などのおかげで「寝たきり」病人が激減
2.安全・安心な社会
・多くの建造物が長寿命化・高容積化するとともに 災害に強く住みやすい住宅づくり・街づくり
・地震、津波等の自然災害時においても高度な予測 技術・災害情報ネットワークにより被害が減少 3.多様な人生を送れる社会
・テレワークの普及により、自宅で仕事をしながら子 育てができる生活が普及
・人工知能ロボットにより、家事・育児にかかる時間 を自分の時間として持つことが可能
4.世界的課題解決に貢献する社会
・省資源・省エネ等世界トップレベルの技術を活用 し、地球規模の環境問題の改善に貢献
・環境ビジネスの拡大により日本企業の国際競争 力が向上し、アジアの若者が日本で環境を学ぶ 5.世界に開かれた社会
・自動翻訳機の普及等により、あらゆる国の人々と のコミュニケーションが可能
・バーチャルリアリティ技術が進化し、海外の文化・
歴史遺産など家に居ながら現実社会を実感
れを上下させるリフト部を備えたマニピュレータ部から構成されるロボットを開発し、これを広く家 庭環境内に浸透させることを目指すものである。
また、岐阜・大垣地域「ロボティック先端医療クラスター」の目的は、RT や情報処理技術などの 工学技術を応用した特徴ある新しい医療技術を研究し、手術ロボットや画像診断装置、医療情報シス テム、医療教育システム、医療用センサなどの先端的な医療機器を開発することである。岐阜県のも つ高い研究ポテンシャルであるIT やRTを活用し、高度医療・健康支援システムの研究開発に取り 組むことで、医学と工学の融合による技術革新型クラスターを形成する。具体的には、医師による顎 顔面組織へのマッサージを再現することが可能なオーラルリハビリテーションロボットの開発を実 施している。
その他、ロボット開発に関しては、科学研究費補助金により行われているものもある。
2.1.4 農林水産省の施策動向
農林水産省は、補助事業で「次世代園芸 ロボット技術導入検証事業」を行っている。
これは、次世代園芸生産の確立に向け、RT の本格導入を図るため、園芸用 RT の生産 現場への導入、産業用 RT の転用可能性の 検証を行い、実用化の加速化を図るもので ある。その他、「先端技術を活用した農林水 産研究高度化事業」(2007~2009年度)では、
「ウエアラブルアグリロボットの実用化」
としてアシストスーツの開発が産学協同で 進められている。団塊世代の定年後の就農 支援、高齢者の長時間の作業のアシストに 加え、10万人以上の雇用創出、ワールドワ
イドで1,000億円規模の市場の生成などを、期待される成果を挙げている。
また、「今年のロボット」大賞2008では、田植えロボット(写真 2.1.4-1)が審査員特別賞を受賞し ている。高精度GPSと姿勢計測装置等により、予め水田形状をGPS計測して設定した作業経路に沿 って田植えを行うロボットである。30aの水田でのノンストップ完全無人田植え作業を約50 分で完 了でき、栽培時の施肥や農薬散布など、使用場所や量が容易に記録できる。食の安全・安心の確保へ の貢献や、農業就業者の高齢化・減少に対応し、食料自給率向上への貢献が期待されるものである。
2.1.5 経済産業省の施策動向
経済産業省では、経済成長戦略大綱、ロボット政策研究会報告書等に基づき、研究開発プロジェク ト、ロボットビジネス推進協議会、「今年のロボット」大賞等の取組を推進し、ロボット産業の振興 を行っている。
ロボット分野の導入シナリオに関しては、経済産業省の研究開発プロジェクト等を実施し、次世代 ロボット普及への道筋を示している。また、技術マップでは、ロボット分野の技術の特徴を捉え、様々 なニーズのロボットに必要となる機能や環境を抽出しその関係を整理するほか、技術ロードマップ (図 2.1.5-1)において、その実現時期を示している。
写真 2.1.4-1 田植えロボット
出典:ロボット大賞 http://www.robotaward.jp
ロボット分野の技術戦略マップ10)には、ロボット分野の目標と将来実現する社会像について記載さ れ、少子高齢化への対応、労働力人口の減少、安全・安心な社会の実現、便利でゆとりある生活の実 現のために、ロボットが生活、公共の場でより身近な存在として役立つことを期待している。
これまで、10 年後の市場ニーズ及び社会ニーズから導かれたミッションを設定し、これを達成す るために必要なロボットシステム等の開発を行うもの(戦略的先端ロボット要素技術開発プロジェク ト)、生活空間など状況が変わりやすい環境下においても、ロボットが確実性(ロバスト性)をもって 稼働できるようにするため、自律的に活躍するロボット開発の効率化を向上する再利用可能な知能化 モジュール(ソフトウェア)の研究開発(次世代ロボット知能化技術開発プロジェクト)等が行われて いる。
さらに関連施策として、「次世代ロボット安全性確保ガイドライン」を取りまとめ、技術開発と並 行して安全に係るルールなどの整備と国際標準化を推進している。
2.1.6 国土交通省の施策動向
国土交通省では、土木工事に関するロボット等を活用した建設施工技術の開発を行っている。土木 工事においては、雲仙普賢岳のような災害復旧現場のほか、地下空間、トンネル、急傾斜地、土壌汚 染地における工事など、危険や苦渋を伴う作業が含まれていることが多く、そのような建設施工の作 業環境を改善し、作業の安全性を向上させる新しい技術として、人に代わってロボット等が作業をす るロボット施工を考えている。
国土交通省では、平成15年度(2003年度)より平成19年度(2005年度)までの5箇年の計画の総合 技術開発プロジェクトとして、最先端のIT やRTを活用し、既にある災害復旧現場等におけるロボ ット施工技術の汎用性を高めるとともに、施工現場において容易に利用可能な3次元空間データを用
出典:経済産業省 http://www.meti.go.jp/policy/robotto/index.html 図 2.1.5-1 技術ロードマップ
いた施工技術や遠隔操作ロボット等による施工技術の研究開発を行っている。最終年度の平成19 年 度には、本研究により開発された技術を取り入れた建設施工ロボットのプロトタイプモデルを試作し、
実作業への適用性について検証している。
研究テーマとしては、遠隔操作ロボット等による施工技術の開発や3次元空間データを用いた施工 技術の確立などがあり、国土技術政策総合研究所および土木研究所が主体となり研究開発を行ってい る。
また2008年4月には新たに5箇年の「国土交通省技術基本計画」が策定され、「住宅・社会資本の 整備・管理が効率化、高度化された社会」の実現として、補修ロボットや点検ロボット、「テロ・大規 模事故ゼロ社会」の実現として、警備ロボットが盛り込まれている。
2.1.7 防衛省の施策動向
防衛省は技術研究本部により、中長期的な技術分野の取り組み指針となる文書 『中長期技術見積 り』(2007 年4月)をまとめている。中には、近年の科学技術の進展は、後述の防衛環境及び運用環 境に多大な変化を与える一方、また、これらの変化に対応する可能性を与えるものでもある。特に、
情報通信技術の進歩は、統合運用に必要な情報の共有や一元的な指揮統制を可能とするばかりでなく、
作戦の進展速度を増大させることも可能であり、各種機能を有機的に連接した情報ネットワークを中 心とした戦い方を生起させ、情報通信技術を駆使し得るか否かが作戦成否を左右する状況となってい る。また、ロボット、センサデバイス、ソフトウェアなどの分野において、防衛装備への転換が可能 な優れた民生技術が著しく進展していると記されている。さらに文中には、コア装備等および将来装 備システム技術それぞれの分野について技術研究本部が自ら開発するための技術解明に必要な期間 として5~15 年の年限を設定している。有人では困難な環境下での情報収集においては、「人的被害 を避け、かつ広域の監視が可能なロボット・無人機が適しており、地上 RT、UAV(無人航空機) 技 術、UUV(無人潜水艦)技術について研究する必要がある。」などとして、情報収集や探査におけるロ ボットや無人機の有用性を記し、開発を重視する方向を示している。さらに地上RTについては、「テ ロやゲリラ・特殊部隊攻撃等の多様化する事態に対応するため、 各種の機能を有した複数のロボッ トからなるシステム運用が可能なネットワーク化ロボットシステムを実現する技術である。所要の研 究を経て、概ね 5 年後に単一機能ロボットの、10 年後頃にネットワーク戦闘ロボットの実現のため の技術課題を解明し得る見込みである。」と、 ロボット群をシステマティックに運用できる技術の開 発見通しを述べている。
2.2 海外の RT 利活用動向
本節では、欧米における RTの開発動向について、関連ウェブサイトや NEDO海外レポート1)を 参考に調査・整理し、日本・米国・欧州のRTの開発動向を比較する。
まず欧米の経済情勢について見てみると、米国経済は2008年「100年に一度」といわれる金融危 機に見舞われ、世界経済を揺るがす震源となった。オバマ新政権のもと環境分野に重点を置いた公共 投資「グリーン・ニューディール」が注目されるが、2009 年も引き続きマイナス成長は避けられな いとの見方がある。一方の欧州経済も、1月19日のEU欧州委員会の発表によると、2009年の実質 経済成長見通しを、プラス成長からユーロ圏ではマイナス1.9%、EU全体ではマイナス1.8%と大幅 に下方修正した。
2.2.1 米国における RT の開発動向
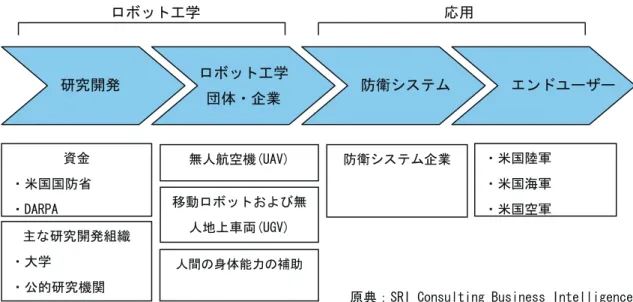
米国では幅広い分野を対象にロボット開発が行われており、国防総省国防高等研究事業局(DARPA)、
陸軍、海軍などの防衛関係の組織が、国内の大学で行われている基礎研究開発に多額の研究資金を投 入している。ソフトウェア産業においてもロボット分野に対する関心が高く、サービス用ロボット、
家庭用ロボット、レジャーロボットなどを対象とした「ソフトウェア・プラットフォーム」の開発が 進んでいる。米国では、民間企業はロボット工学に対して極めてトップダウン的なアプローチをとっ ていることが多く、その一方で、研究者たちは高度なロボットや先進的な実現技術の研究開発を続け ている。
1) 防衛用ロボット
防衛部門は、米国のロボット開発を推進する大きな役割を果たしている。図 2.2.1-1に示すよう に、RTの開発として報告されている代表的なもののうち、約20%が軍事用ロボットに関係してい る。
DARPAは高度なロボット研究を推進する中心的な役割を果たしている。その研究の多くは実用
化に至るまで少なくとも10~15年が必要となるが、「米国の防衛ロボットは国際競争のレベルより も数年進んでいる」ともいわれ、この分野をリードしている。また、米国の防衛ロボット産業には、
大学から商業用ロボットの製造企業まで多くの組織が関わっている。防衛用ロボット開発に積極的 に参加している組織を図 2.2.1-2に示す。
図 2.2.1-1 米国におけるロボット技術開発の分析(2006~2007 年)
出典:NEDO 海外レポート No.1,012
(1) 無人航空機(UAV)
UAV はすでに、世界中で多くの航空部隊に利用されている。その多くは偵察機であり、特に 軍関係者に画像を中継するために活用されている。米国では、より優れた機能性とより高い性能 を持つUAVが開発されている。米国空軍は、今後数年のうちにUAVの用途を増やし、役割の幅 を広げる予定である。さらに、将来的には沿岸警備や警察など軍事目的以外の役割も果たすこと が期待されている。
クリーンエネルギーを活用したユニークな事例として、アメリカ航空宇宙局(NASA)とエアロ バイロメント社が開発した、太陽電池と燃料電池を電源とする無人航空実験機「ヘリオス」
(Helios)がある。Heliosは2001年8月に高度30kmの成層圏の無人飛行を達成した。機器の搭 載能力が小さく、滞空時間が短いといった課題はあるが、火星探索計画を実現する機体を設計す ることが開発目的の一つであった。
(2) 無人地上車両(UGV)
UGV や同種のロボットは、すでに多数が軍事目的で利用されている。これらのロボットはさ まざまな状況で兵士を強力に支援している。今のところ戦闘には直接かかわっていないが、将来 的にはロボットシステムが積極的に戦闘に参加していく可能性もある。
爆発物処理用ロボット Talon(タロン)を生産し米軍に供給してきたフォスター・ミラー社は、
自動小銃を装備した武装車両 SWARDS(ソーズ)を開発した。Talon は、キャタピラでの不整地 走行が可能なバッテリ駆動式の遠隔操作ロボットで、時速約 8km での走行が可能、約 800m離 れた場所から遠隔操作が可能である。4台のカメラや暗視装置によって周辺の状況を確認するこ とができるため、生身の兵士にかわって偵察や警戒にあたることができる。すでにイラクにおい て爆発物処理などに活躍しているほか、世界貿易センタービルの瓦礫撤去でも活躍した。米ポピ ュラーメカニクス誌によると、米軍は3機のSWARDSを2007年に試験的にイラクに実戦配備 したが、敵・味方の判別ができず味方に銃口を向けたため、実戦配備は時期尚早としてわずか11 時間で撤収されたという。
研究開発 ロボット工学
団体・企業 防衛システム エンドユーザー
資金
・米国国防省
・DARPA
無人航空機(UAV)
ロボット工学 応用
主な研究開発組織
・大学
・公的研究機関
・米国陸軍
・米国海軍
・米国空軍 防衛システム企業
人間の身体能力の補助 移動ロボットおよび無 人地上車両(UGV)
原典:SRI Consulting Business Intelligence
図 2.2.1-2 米国におけるロボットの軍事利用に関する価値連鎖
NEDO 海外レポート No.1,012 の記載内容を加工
(3) 負傷者搬送用ロボット
戦争が起きれば人的被害が出るのは避けられない。負傷者を救助するシステムや、さらには手 術を支援システムの開発が進められている。ベクナ・ロボティックス社は、負傷した兵士を移送 するBEAR (Battlefield Extraction and Retrieval Robot)という熊の顔をしたロボットを開発し た。
米軍は、戦闘で負傷した兵士のリハビリテーションや治療を向上させる鍵として、新しい技術 に注目している。米国防総省は現在、イラク戦争で即席爆発装置によって重傷を負って帰還した 兵士の治療のために多額の予算を費やしている。ロボットによる外科手術システムが開発されれ ば、野戦病院で役立てることができるため、「手術カプセル(Trauma Pod)」と呼ばれる戦地用ロ ボット外科手術ユニットの開発に対して、DARPAは資金を提供している。
2) 家庭用ロボット
アイロボット社が開発した掃除機ロボットRoomba(ルンバ)は、販売開始から約5年間で日本を 含めて世界で250万台以上が売れた。2005~2006年の好調な売り上げを受けて、アイロボット社 は引き続き製品のラインナップを拡大し、従来モデルよりも格段に高い機能を持つ次世代機も登場 した。例えば、掃除したい曜日や時間を設定すれば、自動的に掃除を開始し、掃除を終えると充電 機に戻る、部屋と部屋の間に置くことによって、一つ目の部屋の掃除を完了すると二つ目の部屋に 自動的に誘導する機能をもち、付属のワイヤレスリモコンで遠隔操作したり、スケジュール設定し たりできるという。同社ではさらに、プール清掃ロボット、雨どい清掃ロボットも販売している。
3) 農業用ロボット
専門的なサービスを行うロボット分野では、興味深いものとして農業用ロボットの開発があげら れる。同時多発テロ以降、入国審査を厳格化した米国では、移民による労働力が制限されるように なった。カリフォルニア農業事務所の推定によれば、全米で供給される果実、野菜、ナッツ類の約 半分がカリフォルニア州で生産されているという。この収穫量を得るには、夏季には45 万人、夏 季以外にはその約半分の労働者が必要となる。実際にカリフォルニアの農家では労働力不足が深刻 な問題となっており、果実が収穫されずに畑に放置されて腐ってしまうという事態も発生している という。
ビジョン・ロボティクス社は、カリフォルニア柑橘類研究理事会およびワシントン州リンゴ評議 会のために収穫ロボットの開発を進めている。同社のロボットシステムは、果樹園やブドウ園を走 査して、果物の在処と熟成度を示す三次元マップを作成するというものである。カリフォルニア州 立大学フレズノ校の研究チームも、果実の化学組成を測定して、丁度良く熟した果実を収穫できる システムを開発している。
4) ロボット技術(RT)開発
米国での最先端のロボット研究開発の中にはいくつかの興味深いものがある。“吸盤足”の研究 をしているスタンフォード大学の研究チームは、ヤモリを模したロボットを開発した。ヤモリの足 の裏には微細な毛がびっしりと生えていて、分子間の力が作用して壁にくっついたりすぐに剥がれ たりできるという。その足の裏の複雑な形状を真似て、毛の向き次第で簡単にはがれる足裏パッド を作り出した。現状では動きが遅いのが難点であるが、将来は惑星探査や人命救助などに応用した いという。また、開発に「バイオミメティクス」(生体模倣)2)の研究分野をに生かしている点でも 興味深い。
5) ロボット用ソフトウェア開発プラットフォーム
ロボット用のソフトウェアシステムとその開発プラットフォームは、2006 年に登場した分野で ある。マイクロソフト社が子会社のマイクロソフト・ロボット社を通してロボット分野に参入した ことは、特に大きな意味を持っている。同社は、次世代の非産業用ロボット向けに強固な基盤を提 供することを目的として、ソフトウェア開発プラットフォーム「マイクロソフト・ロボティクス・
スタジオ」の開発・販売を行っている。マイクロソフト社は、ロボット工学を今後重要な産業分野 になると見ており、同社は2007年8月、カーネギーメロン大学ロボット研究所の革新的ロボット センタに資金援助したことを発表した。ビル・ゲイツ会長は Scientific American 誌の2007年 1 月号へ寄稿し、「家庭用ロボット技術の現状は、1970年代後半に私たちが参入した当時のパーソナ ル・コンピュータ産業と同じような発展段階にある」と述べている。
その他、エボリューション・ロボティクス社もまた、さまざまな非工業用ロボットの基盤を提供 するために、ロボット開発の主要企業(アイロボット社、WowWee 社、バンダイ㈱など)との連携 を続けている。
2.2.2 欧州におけるRTの開発動向
欧州では産業用ロボットはかなり確立し成功しており、他の分野では過去 10 年間、国際競争に遅 れをとっていたが、現在では進歩の兆しが現れている。
欧州のロボット市場におけるプレイヤ達の分野別の活動状況を示したのが図 2.2.2-1である。欧州 でのロボット工学の活動分野は、専門サービスロボットが20%、次いで産業ロボットが17%、次い で軍事と安全、医療がいずれも10%程度となっている。
また、欧州の研究者やプレイヤ達は、将来世代のロボットを支える基盤的な技術開発(ソフトウェ ア、ハードウェア、人とロボットの相互関係に関連する研究開発)に対して、活動的である。
1) 産業用ロボット
近年、欧州の産業用ロボット分野はかなり活発である。ABB グループはスイスに本社があり、世 界100ヵ国以上に111,000人のネットワークを擁する電力技術とオートメーション技術の企業である。
ABBグループは、2006年にロボット部門の本社をミシガン州のデトロイトから中国の上海に移転し た。1995 年以降、中国の産業用ロボット分野において相当の存在感を示しており、顧客の中心は自 動車産業である。中国での自動車関連顧客(フォルクスワーゲン、ゼネラルモータース等)は国際的な 大企業であるが、同社は顧客の拡大や中国の自動車メーカとの新たなパートナーシップの形成に熱心 である。
2) サービス分野のロボット (1) 防衛分野
米国のように大規模な防衛関係の研究を行うことは、欧州ではそぐわない。しかし欧州の企業 の中には、実入りの好い世界の防衛市場へ参入している企業もある。
例えば、英国のQinetiQ(キネティク)社は、米国を活動拠点とするTalon軍用ロボットなどを 製造するフォスター・ミラー社を買収した。QinetiQは、英国国防省研究評価庁(DERA)が2002
図 2.2.2-1 欧州でのロボット工学の分野別活動状況
出典:NEDO 海外レポート No.1,012
年に民営化された欧州最大の研究機関である。
この分野で活躍している他の企業にはBAEシステムズ社(英国)、EADS社(フランス)がある。
(2) 専門サービス業務ロボット
KUKA Roboter社 (ドイツ)は、エアバスの航空機の翼を磨くロボットや、丘の斜面の安全を
守り土砂崩れを防ぐロボ・クライマーRoboclimberを開発している。
Plustech社(フィンランド)は、林業用6脚歩行ロボットの試作機を開発した。オペレータが乗
り込み操縦し、アームの先端の機械が伐採、枝払い、定尺切り揃えの作業を自動的に行うという。
Cybernétix 社(フランス)は、原子力分野や海洋分野で活躍するロボットを開発している。遠
隔操縦による耐高放射線ロボットMENHIRは、原子力施設での災害対応を想定して開発された。
同社は、2007年に双日㈱と提携し、日本で原子炉解体エンジニアリング事業を開始した。
ラフバラー大学(英国)の研究者はインクジェットプリンタと同様な方法で作動する家屋建設 ロボットの開発を行っている。同チームは英国工学および物理科学研究評議会から約250万ドル の支援を受けている。コンピュータ制御されたノズルはセメントと石膏の混合物を噴射して層状 に家を作りあげて組み立てていく。研究チームは、このロボットは埋め込み式の風呂や暖炉など 屋内のいくつかの複雑な形状を作ることができるかもしれないと報告している。
3) 家庭用ロボット
プラスチック製の組み立てブロック玩具で有名なデンマークのLego社が、2006年に発表したロ ボットキット「マインドストーム NXT」は、一般愛好家や教育用ロボティクスの世界に革命を起 こした。ロボットの心臓部であるNXT と呼ばれるマイクロプロセッサが組み込まれたインテリジ ェントブロックにプログラミングすることにより、レゴブロックで組み立てた自律型ロボットが、
自由でユニークな動きをする。
フランスの玩具のメーカMecano社はSpykee(スパイキー)と呼ばれるロボットを開発した。同 社の web サイトによると、ユーザがつくるキャタピラで動くロボットで、ウェブカメラからのビ デオ映像を、ワイヤレス接続を通じて、パーソナルコンピュータに送ることができるという。
WiFi(無線 LAN)で管理されるスパイロボットは、パーソナルコンピュータからの命令に反応し、
スピーカ、マイクロホンを内蔵している。
4) 酪農用ロボット
2007年、Lely社(オランダ)は、放牧牛を自動的にガイドするロボットシステムVoyagerを開発 した。ロボットは搭載しているソーラーパワーシステムのみで稼動し、放羊犬に代わって2台のロ
ボットがBluetooth(無線通信)を通じて連携して動作し、放電線を使って放牧中の牛たちをガイド
する。また、専用コントローラ上に 1 日当たりに与えるべき牛のエサ(牧草)の量を入力すると、ロ ボットが牛たちの前に放電線を張り、自動的に移動する。ロボットは、牛たちがちょうど良いペー スでエサを食べるように移動速度を調整し、エサの量を調節する仕組みになっているという。
5) 欧州ロボット工学プラットフォーム(EUROP)
欧州テクノロジー・プラットフォームの下で2005年7月、ロボットに関する一つのイニシアテ ィブ「欧州ロボット工学プラットフォーム(EUROP)」が設置された。効果的に先進的ロボット産 業を発達させるために、ロボット関連の欧州企業が中心となった、産官学共同のロボット研究開発 体制のベースになる機関である。その設置に際してはビジョンレポートが発表され、今後約 20 年 間でロボットの研究開発が可能にする社会経済上のインパクトが明記された。EUROPが2006年 3月に発表した戦略研究計画(SRA)の事業計画について、その一部を紹介する。
(1) 展望
ロボットシステムの将来の展望は、欧州市民を力づける構想だということができる。そのため に必要なのは、人間から隔離された環境ではなく、人間と同じ場所で一緒に働くロボットである。
つまり人々と交流し、お互いにやりとりし、作業の必要性や周囲の環境に合わせて振る舞うこと のできるロボットである。ロボットシステムは今後数十年のうちに、人間の意思を自然かつ直感 的に汲み取り、補助するものとなるだろう。ロボットの活躍は主に次のような場面で期待されて いる。
・職場で一緒に働くロボット
・専門的なサービス業におけるロボットによる補助
・家庭におけるコンパニオンロボット
・お手伝いロボットと遊び相手ロボット
・安全保障、宇宙分野におけるロボット (2) 課題
韓国と日本がロボット分野に対して積極的に投資していることから、ロボットの開発・生産・
利用の各分野において欧州の地位が危うくなっている。この状況に対処するためには、ロボット 分野に関連するあらゆる団体(特に技術、システム、市場開発分野の団体)が協調して一連の取り 組みを進めていく必要がある。
(3) EUROPのもたらす利益
EUROPは次世代ロボット産業の活力ある動的なサプライチェーンの創出を推し進める。実現
すれば、産業競争力の強化や知識ベースの雇用が進む。逆にロボット産業の発展がなければ、欧 州の市民および産業は国際競争において不利な立場となり、戦略的に不可欠な技術を外国からの 輸入に頼らなければならなくなる。
次世代ロボット産業の強固な供給ネットワークが実現すれば、この分野は強い経済部門に成長 し、国際的にも高い収益をあげるようになる。このような供給ネットワークの誕生はサービス業 や製造業の大幅な進歩にもつながる。これらの産業分野には生産性を向上するツールやシステム が導入され、世界市場における競争力の維持や長期的な雇用機会の確保が可能となる。また、欧 州を拠点とした次世代ロボット産業の発展は、高い技能を必要としない単純労働から知的労働へ の雇用パターンの移行においても重要な役割を果たす。
EUROPはまた、既存の産業に対しても大きな利益をもたらす。既存産業の製品にロボット工
学や認知科学の技術や手法、構成要素などが組み込まれることにより、ロボットとユビキタス・
コンピューティングの時代に適応し、競争力を維持できるようになる。
2.2.3 日本、米国、欧州におけるロボット開発の比較
EUROP が2006年3月にまとめた戦略研究計画(SRA)の冒頭において、欧州のロボット開発の状
況を米国、日本と比較し、欧州の位置づけを整理・明確化しているデータがあるので、ここで引用す る。ロボット研究の実施機関については、日本では産業および政府を含めた組織的なロボット研究が 活発に行われているが、大学の基礎研究レベルは弱い。米国では大学での研究は強いが、防衛分野を 除いて産業界ではあまり広く行われていない。一方、欧州では各機関でほぼ均等に取り組まれている。
(表 2.2.3-1)
ロボット研究の実施機関 日本 米国 欧州
基礎:大学ベースの研究 A AAA A
応用:産業界ベースの研究 AAA B AA 国又は多国間の研究イニシアティブまたはプログラム AAA B AA 大学・産業・国のパートナーシップ:起業家精神 AAA B AA AAA:卓越している、AA:非常に良い、A:良い、B:まあまあ
ロボットの利用分野については、産業用ロボットや家庭用ロボットでは、日本は欧米と比べて進ん でいる。また、人型ロボットの開発にとくに力を入れているが、防衛分野、宇宙分野、バイオ・医療 分野では遅れている(表 2.2.3-2)。
ロボットの利用分野 日本 米国 欧州
ロボット車:軍事及び民生 B AA B
宇宙ロボット B A A
人型ロボット AAA B B
産業用ロボット:製造分野 AAA B AA
サービスロボット:非製造分野 A A A
パーソナルロボット:家庭用 AAA B B
バイオ・医療ロボット B AA AA
AAA:卓越している、AA:非常に良い、A:良い、B:まあまあ
やや古い調査であるが、ロボット分野の国際競争力比較についてのデータがあるので、次に引用す る(表 2.2.3-3)。これによると、日本は製造業分野での競争力は高いが、原子力、宇宙、海洋、災害 対応、医療・福祉など非製造業分野での競争力は、欧米と比べて必ずしも高くはない。
表 2.2.3-1 日・米・欧のロボット開発の比較:実施機関別
表 2.2.3-2 日・米・欧のロボット開発の比較:製品分野別
(NEDO 海外レポート No.1012 の記載内容を加工)
(NEDO 海外レポート No.1012 の記載内容を加工)
応用分野 日本 米国 欧州
製造用ロボット(産業用ロボット) ○ △ △
建設ロボット ○ × ×
福祉ロボット △ △ ○
医療用ロボット × △ ×
原子力ロボット △ ○ ○
災害対応ロボット × △ △
宇宙ロボット △ ○ △
エンタテインメントロボット ○ ○ ×
バイオ産業用ロボット × △ △
農業用ロボット △ △ ○
ホームロボット × × ×
サービスロボット △ △ △
畜産ロボット △ △ ○
海洋ロボット △ ○ ○
探査ロボット × ○ △
○:競争力あり、△:平均レベル、×:競争力弱い
出典:21 世紀におけるロボット社会創造のための技術戦略調査報告書 平成 13 年 5 月 (社)日本機械工業連合会、(社)日本ロボット工業会) 表 2.2.3-3 ロボット分野の国際競争力比較
第3章 最新技術動向
3.1 技術マップ
経済産業省は、産学官の専門家の英知を結集し、NEDO等の協力のもと、技術分野を29分野にお ける『技術戦略マップ2008』を策定した。「ロボット分野」では、経済産業省の研究開発プロジェク トを明示し、次世代ロボット普及への道筋を示している。また、様々なニーズのロボットに必要とな る機能や環境を抽出し、その関係を整理した「技術マップ」、その実現時期を示した「技術ロードマ ップ」が描かれている。
本節では、上記の戦略マップを引用し、ロボット分野の将来ビジョンについて考察する。
3.1.1 ロボット及び RT の概念整理
ロボットやRTの概念の捉え方は複雑であるが、経済産業省は、図 3.1.1-1のように階層構造化し て概念を整理している。
RT としての他分野への活用拡大は重要な視点であり、また、今後のロボットの導入に際しては、
研究開発のみならず、ビジネス振興のための制度整備、標準化の推進、事業化支援なども重要である。
我が国製造業を支えてきたRTを基盤とし、知能化技術など先端的要素技術との融合を促進すること により、家庭、医療、福祉、災害対応など幅広い分野で活躍する次世代ロボットの開発・実用化を促 進することが望まれている。
図 3.1.1-1 ロボットおよび RT の概念整理
出典:経済産業省『技術戦略マップ 2008』
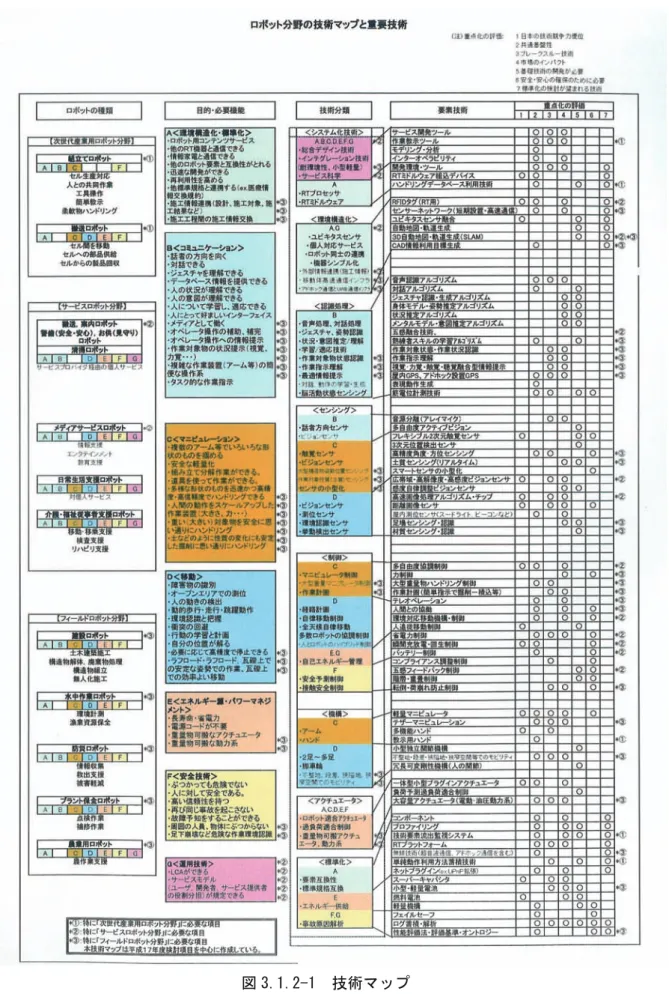
3.1.2 技術マップ
経済産業省は、市場ニーズ、社会ニーズ(それに対応した製品イメージ)を実現する上で必要な技術 課題を抽出・俯瞰した「技術マップ」を作成している。(図 3.1.2-1)この技術マップでは、次に示す 項目について分類・整理している。
1) ロボットの種類
少子・高齢社会への対応、安全・安心社会の実現、さらには便利でゆとりある生活の実現のため に活躍が期待されるロボットとして、『次世代産業用ロボット』、『サービスロボット』、『フィール ドロボット』の3分野を設定している。
次世代産業用ロボットについては「組立ロボット」と「搬送ロボット」に分類している。サービ スロボットについては、「搬送・案内ロボット」、「メディアサービスロボット」、「日常生活支援ロボ ット」および「介護・福祉従事者支援ロボット」の 4つに分類している。フィールドロボットにつ いては、「建設ロボット」、「水中作業ロボット」、「防災ロボット」、「プラント保全ロボット」および
「産業用ロボット」に分類している。
本報告書では、これまでの研究成果も踏まえ、少子高齢化対策および安全・安心社会のためのRT 利活用の観点から、前述の分類を以下に集約した。また、これら6種類のロボットについては、次 節において技術動向を詳述する。
① 産業用ロボット(『次世代作業用ロボット』、「産業用ロボット」)
② 医療関連ロボット(「日常生活支援ロボット」、「介護・福祉従事者支援ロボット」のうち、特 に医療に関連するロボット)
③ サービス・作業支援分野ロボット(『サービスロボット』)
④ 福祉・介護支援ロボット(「介護・福祉従事者支援ロボット」)
⑤ 公共・災害支援ロボット(「水中作業ロボット」、「防災ロボット」)
⑥ 無人化建設ロボット(「建設ロボット」、「プラント保全ロボット」) 2) ロボットの目的・必要機能
ロボットのすべての機能を、①環境構造化・標準化、②コミュニケーション、③マニピュレーシ ョン、④移動、⑤エネルギー源・パワーマネージメント、⑥安全技術、⑦運用技術の7項目に整理 している。
特に、『サービスロボット』、『フィールドロボット』に関しては、①②についてはロボットへの 教示や情報交換の必要機能が、③についてはオペレータ操作の容易化と重量・大型・不定形物への 対応が、④についてはラフロードでの移動機構が、⑥については対人間への保護機能が求められて いる。
3) ロボットの技術分類と要素技術
これらの目的・必要機能を実現するための技術を、①システム化技術、②環境構造化、③認識処 理、④センシング、⑤制御、⑥機構、⑦アクチュエータ(駆動装置)、⑧標準化の8項目に分類し、
今後各技術分類の中で求められる要素技術を抽出している。
必要となる要素技術についても、必要機能と同様な項目(状況認識センサ技術、大型重量マニプ レータやテレオペレーション、不正地層高技術など)が挙げられている。
図 3.1.2-1 技術マップ
出典:経済産業省『技術戦略マップ 2008』
3.1.3 技術ロードマップ
経済産業省は、技術マップにおいて分類した3分野のロボット「サービスロボット」、「次世代産業 用ロボット」、「フィールドロボット」について、10 年後以降の各ロボットの将来像(ミッション)を 想定し、要求される仕様や必要な技術開発等を、技術マップに示された重要技術から抽出し、時間軸 に展開している。(図 3.1.3-1)(図 3.1.3-2)(図 3.1.3-3)
図 3.1.3-1 ロボット分野のロードマップ<サービスロボット>
出典:経済産業省『技術戦略マップ 2008』
図 3.1.3-2 ロボット分野のロードマップ<次世代産業用ロボット>
図 3.1.3-3 ロボット分野のロードマップ<フィールドロボット>
3.2 技術動向
我が国のRTは、世界のトップランナーであり、様々な分野でRTが利活用されている。ここでは、
産業用、医療関連、サービス分野、福祉・介護支援、公共・災害支援、無人化建設の6分野のロボッ トについて最新技術動向を述べる。
3.2.1 産業用ロボット
産業用ロボットには、樹脂成形作業や、アーク溶接、スポット溶接に代表される溶接作業、ロード・
アンロード、研磨などの機械加工作業、電子部品や製品などの組立作業、マテリアルハンドリング作 業、塗装作業、半導体などのクリーンルーム内作業など工場内で利活用されているロボットと清掃や 警備、建設などで利活用されているその他のロボットがある。
2007 年のこれらの出荷額割合と出荷額を表 2.3.1-1に示す。工場内で使用されるロボットの割合 が、全体の 95%以上を占めており、サービス分野でのロボットは、これからの市場を作るロボット 分野であると業界でも期待されている。輸出を含めた総出荷額は7,000億円を超え、1兆円産業を目 前としていたが、今年度半ばより経済状況が悪化したため、工場内で使用されるロボット産業につい ても景況は悪化している。
技術動向としては、安川電機が開発した第 10 世 代 液 晶 ガ ラ ス 基 板 搬 送 ロ ボ ッ ト
「MOTOMAN−CDL3000D」が、「今年のロボッ ト」大賞2008の「日本機械工業連合会会長賞」
を受賞している(写真 2.3.1-1)。
このロボットは、第10世代サイズと呼ばれる、
3m 角クラスの超大形液晶ガラス基板搬送をタ ーゲットに、業界で初めて昇降軸にダブルリンク 式支柱を採用し、基板の大形化による生産効率向 上への対応、設備費用削減やライン立上げ費用・
時間の低減を実現したものである。
受賞理由としては、技術革新が進むフラットパ ネル・ディスプレイ分野において、世界初の独自 技術により高速・高精度・安定搬送のニーズに応
図 2.3.1-1 液晶ガラス基板搬送ロボット 出典:㈱安川電機 http://www.yaskawa.co.jp
単位:百万円
用 途 国内出荷 左記割合 輸出 左記割合 出荷計 左記割合
樹脂成形 15,281 5.4% 12,667 2.9% 27,948 3.9%
溶接 57,025 20.0% 59,068 13.5% 116,093 16.0%
機械加工 19,223 6.7% 11,527 2.6% 30,750 4.3%
組立 107,950 37.8% 267,425 61.0% 375,375 51.9%
マテリアル・ハンドリング 17,173 6.0% 22,164 5.1% 39,337 5.4%
溶接 10,419 3.7% 12,035 2.7% 22,454 3.1%
クリーンルーム内作業 38,308 13.4% 41,893 9.6% 80,201 11.1%
その他用途 19,863 7.0% 11,391 2.6% 31,254 4.3%
用途計 285,242 100.0% 438,170 100.0% 723,412 100.0%
出典:日本ロボット工業会 HP http://www.jara.jp 表 2.3.1-1 日本のロボット出荷額と割合
えた点の評価と、液晶以外にも太陽電池分野への展開も期待されるなど、ロボットの活用範囲を拡げ る工夫もあげられている。
また、昨年度の「今年のロボット」大賞2007では、ファナックの「M-430iAのビジュアルトラッ キングによる高速ハンドリング」が、大賞(経済産業大臣賞)を受賞している。
FANUC Robot M-430iAは、コンベア上を高速に流れてくる物品を瞬時にピッキングする垂直多関
節ロボットで、1台あたり毎分120個の処理能力で24時間連続運転が可能である。iRVisionによる ビジュアルトラッキング機能と組み合せて、コンベアでバラバラに供給される物品も素早く整列し、
箱詰めすることが出来る。また、高速・連続稼動性に加え、丸洗いのできる清潔性も備えており、食 品・医薬品や化粧品などの製造現場において、これまで人手や専用機に頼ってきたハンドリング作業 を代替する安価で柔軟なロボットシステムを構築することが出来る。(図 2.3.1-2)
3.2.2 医療関連ロボット
3.2.1では、産業用ロボットを説明したが、本款では、非産業用のうち、生活分野(サービス・エン
ターテインメント)と公共分野をのぞいた医療関連分野で利用される RT の動向を述べる。なお、福 祉・介護支援分野は、3.2.4において詳述する。
医療用ロボットの市場は、産業用ロボットがすでに5,000億円の市場規模となっていた2003年時 点での市場予測(JARA 報告書)では、2010 年までに、700 億円の市場規模が見込まれ、生活分野全
般では7,000億円、福祉・介護では900億円の市場規模が予測されていた。現状では、医療の規制緩
和の問題などもありそれほど進展はしていないが、医療分野への期待の大きさは現在も変わらない。
医療関連ロボットへの主な期待は下記である。
安全で正確な治療を行う
感染する危険性の高い作業を任せ医療従事者の安全性を確保する 医療従事者不足をカバーすることにより人間的な医療環境を実現する
RT利用の教育シミュレータ導入により、動物実験の減少と高度な医療技術の訓練を可能とする 医療関連ロボットは、まだ確定した分類はないが、ここでは、1)手術支援ロボットシステム、2)微 少ロボット(マイクロマシン)、3)ロボット化医療機器にわけて、説明する。なお、医療用では、安全 上の問題から自律的に動作をさせる場合がすくないため、主にロボットシステム(RTSと略称)と呼ぶ
図 2.3.1-2 M-430iA のビジュアルトラッキングによる高速ハンドリング 出典:㈱ファナック http://www.fanuc.co.jp