修士論文
心拍数を用いた空調管理の最適化
早稲田大学 基幹理工学研究科
情報理工学専攻
野元 隆介
Optimization of Air Conditioning Management Using the Heart Rate
Ryusuke Nomoto
Thesis submitted in partial fulfillment of the requirements for the degree of
Master in Computer Science and Engineering
Student ID 5112B054-2
Submission Date February 2 , 2015
Supervisor Professor Tatsuo Nakajima
Department of Computer Science and Engineering
Graduate School of Fundamental Science and
Engineering
Waseda University
概要
近年のスマートフォンの浸透やウェアラブルデバイスの台頭から今日では人間の様々なライフ ログを蓄積,管理することが簡単になった.こうしたライフログを日々の生活の向上に役立てようと する活動をQuantified selfという.また, IoTに代表されるように家の中の様々なデバイスをスマート フォンと接続しスマートフォンから家電を操作したり家庭内のタスクを自動で管理・制御するHome automationという仕組みがある.
本研究ではこれら2つの考え方を組み合わせ,更なる生活の質の向上を目指した.具体的には人 間の心拍数と室温をセンシングしそれらから室内にいるユーザが快適と感じる温度を学習・推定しコ ンピュータによる空調管理の最適化を目指した. 評価実験の結果,空調最適化を行わなかった場合と 比較し,行った場合の方が被験者の空調操作回数が平均約4回減少したことを確認できた.また,個人 向けの最適化と部屋に複数人いる場合の最適化を比較し,複数人への最適化がより大きな効果がある ことがわかった.また,不意に心拍数が変化した時への対応などといった将来課題も得られた.
Abstract
Thanks to the increase in prominence and ease-of-use of smartphones and wearable devices during the last years, it is now possible to accumulate and manage various types of personal information, such as life logs. Life logs are collections of personal data generated by our own behavioral activities. One specific kind of life-log, which may serve to increase the quality of life thanks to its attributes, is called Quantified self. On a similar trend, the use of one or more computers to control basic home functions, sometimes even remotely, has made the collection of personal information at home possible. This type of home data collection is called Home Automation.
For our work, we mixed those techniques with the aim to benefit the use of home technology, and positively influence the quality of life of a person. To be specific, we sensed a person’s heartbeat and room temperature in order to optimize the control and use of the air conditioning system, by learning from user behavior. We evaluated our approach, and the results suggests that the use of our system to control air conditioning use is preferred to the regular setting, as it is based on the person’s body temperature, and it is more cost-effective. Furthermore, we found that optimizing the AC use for multiple users is more efficient than for one user. As part of our future work, we intend to deal with possible sensing mistakes, such as situations in which a person’s heartbeat may change abruptly.
目 次
第1章 序論 1
1.1 背景 . . . . 1
1.1.1 Quantified self . . . . 1
1.1.2 Home automation . . . . 3
1.2 研究の動機と目的 . . . . 7
1.2.1 Quantified selfのHome automationへの適応 . . . . 7
1.2.2 心拍数を用いた空調管理 . . . . 8
1.2.3 空調最適化による社会への貢献 . . . . 8
1.3 論文の構成 . . . . 9
第2章 空調に関する背景知識 10 2.1 暑さ・寒さを感じる仕組み . . . . 10
2.1.1 体温調節. . . . 10
2.1.2 人体の温度センサ. . . . 10
2.1.3 温感を左右する要因 . . . . 11
2.1.4 屋内と屋外の温度差 . . . . 12
2.2 空調管理に用いられる技術 . . . . 12
2.2.1 人間の動きを感知した空調管理 . . . . 13
2.2.2 サーキュレーション気流 . . . . 13
2.2.3 気流の通り道を検知し送風. . . . 14
2.2.4 Nest Thermostat . . . . 14
第3章 データと解析手法 16 3.1 解析手法. . . . 16
3.1.1 重回帰分析 . . . . 16
3.1.2 ディープラーニング . . . . 18
3.2 データ収集 . . . . 24
第4章 空調最適化への応用 29
4.1 実験概要. . . . 29
4.2 実験システム . . . . 29
4.2.1 センシングパート. . . . 29
4.2.2 解析パート . . . . 29
4.3 個人向け実験 . . . . 30
4.3.1 被験者 . . . . 30
4.3.2 実験場所と期間 . . . . 30
4.3.3 タスク . . . . 31
4.3.4 評価指標. . . . 31
4.3.5 実験結果. . . . 31
4.4 複数人向け実験 . . . . 32
4.5 アンケート調査 . . . . 33
4.5.1 アンケート内容 . . . . 33
4.5.2 アンケート結果 . . . . 34
第5章 考察 38 5.1 心拍数を用いた空調最適化の可能性 . . . . 38
5.2 室温の変化と体感温度の変化のずれ . . . . 38
5.3 複数人への空調最適化の結果に関する考察 . . . . 39
第6章 将来課題 40 6.1 システムへの落とし込み . . . . 40
6.2 その他のケーススタディ . . . . 40
第7章 結論 42
参考文献 44
図 目 次
1.1 Nike FuelBand . . . . 2
1.2 Pancreum . . . . 2
1.3 Jowborn UP3. . . . 3
1.4 Panasonic Smart Appのイメージ . . . . 4
1.5 SmartThings Hub . . . . 5
1.6 開閉感知センサ . . . . 5
1.7 家にいるかどうかをセンシングするデバイス . . . . 5
1.8 動きを検知するデバイス . . . . 5
1.9 電源のオンオフを行なうデバイス . . . . 5
1.10 Electric Imp . . . . 6
1.11 HomeOS概略図 . . . . 7
2.1 ムーブアイ機能のイメージ図 . . . . 13
2.2 サーキュレーション気流を実現する構造 . . . . 14
2.3 気流の通り道を見つける機能をOFFにした時 . . . . 14
2.4 気流の通り道を見つける機能をONにした時 . . . . 14
2.5 Nest Thermostat . . . . 15
3.1 あてはまりの良い回帰直線と悪い回帰直線の例. . . . 17
3.2 画像認識研究のパラダイム変化 . . . . 19
3.3 ニューラルネットワークの階層構造 . . . . 20
3.4 閾値論理ユニットの入出力 . . . . 20
3.5 Auto Encoderによるプレトレーニング . . . . 22
3.6 心拍数が80bpmから100bpmへ変化する様子 . . . . 25
3.7 心拍数が120bpmから100bpmへ変化する様子 . . . . 25
3.8 上に凸な心拍数の変化 . . . . 25
3.9 下に凸な心拍数の変化 . . . . 25
4.5 実験A,実験B,実験C,各実験の空調に10点満点で点数をつけるとしたら何点ですか? . . . . . 36
表 目 次
2.1 1日の放熱量 . . . . 10
2.2 1日の産熱量 . . . . 11
2.3 温感に影響を与える要因 . . . . 11
2.4 作業ごとのMet値 . . . . 12
3.1 被験者の年齢と性別 . . . . 26
3.2 被験者に行ってもらったタスク . . . . 26
3.3 重回帰分析による解析結果 . . . . 28
3.4 温度の正解クラス分け . . . . 28
3.5 各学習方法とテストデータに対する正解率 . . . . 28
4.1 被験者に行ってもらったタスク . . . . 31
4.2 個人評価実験後アンケートの質問項目. . . . 33
4.3 複数人評価実験後アンケートの質問項目 . . . . 34
4.4 Q2に対する回答 . . . . 35
4.5 Q3に対する回答 . . . . 35
4.6 Q4に対する回答 . . . . 35
4.7 Q5に対する回答 . . . . 35
4.8 Q6に対する回答 . . . . 35
4.9 Q2に対する回答 . . . . 36
4.10 Q3に対する回答 . . . . 36
4.11 Q1に対する回答 . . . . 37
4.12 Q5に対する回答 . . . . 37
4.13 Q6に対する回答 . . . . 37
4.14 Q7に対する回答 . . . . 37
第 1 章 序論
本章では本研究の背景となるQuantified selfとHome automationについて説明すると共に,研究の動機と目 的,及び論文の構成について述べる.
1.1 背景
1.1.1 Quantified self
Quantified selfとはアメリカカリフォルニア州シリコンバレーから始まったムーブメントである.コンピュー
タや各種ガジェットを用いて人間の行動や状態を定量的に観測し生活の質の向上や新しい知見を得るために役立 てていく.こうした活動は昔からあったが,近年のスマートフォンの浸透やウェアラブルデバイスの出現によっ てより簡単にライフログを計測することができるようになったことからここ数年大きな盛り上がりを見せてい る. 2011年から毎年Quantified self conferenceという世界規模の会議が開かれ,数多くの登壇者たちが‘What I did’, ‘How I did it’, ‘What I have learned’の軸に沿って自分たちが行った活動とそこから得た知見を発表してい る[15].
Quantified selfではありとあらゆる人間のライフログを収集し,生活に役立てることができる.このライフロ
グの収集において近年台頭してきているウェアラブルデバイスが大きな役割を占めている.以下に代表的なラ イフログ収集用のウェアラブルデバイスを紹介する.
Nike FuelBand
Nike FuelBandは人間の活動量を計測することができる腕時計型のウェアラブルデバイスである[3].Nike
FuelBandでは人間の活動量を定義する独自の単位としてNIKE FUELを採用している. NIKE FUELを用いるこ
とにより,ユーザの性別,身長,体重に関係なくユーザの1日の動きを定量化している. Nike FuelBandは独自の スマートフォンアプリと連携することによりユーザの一日の活動量,頻度,負荷をリアルタイムにグラフにまと め可視化することができる.これによってユーザのモチベーションを維持することができる.また,同じように
Nike FuelBandを持つユーザ同士でグループを作り,ユーザ同士で声援を送ったり達成度を共有したりランキン
グで競いあうことによりユーザのモチベーションを落とさないようにしている.図1.1にNike FuelBandの外観 を示す.
図1.1: Nike FuelBand
引用: http://www.nike.com/jp/ja jp/c/nikeplus-fuelband
Pancreum
Pancreumはユーザの腹部に装着するタイプのウェアラブルデバイスである[14]. Pancreumは血糖値の計測,
管理を行なうことができる, 4つの部品からなるデバイスとスマートフォンで構成されるシステムである.身体 に装着するデバイスは,バッテリやCPUなどを搭載した心臓部に, 3種の異なる機能を持ったそれぞれの部品を, 症状に合わせて組み合わせて使用する.各部品はインスリンポンプ,グルコースモニタ,グルカゴン/コンチゾー ル/アドレナリンなど低血糖を防ぐ成分の投与の役割を担っている. PancreumはスマートフォンとBluetoothで 接続し,リアルタイムにユーザの血糖値を計測,その状態をグラフに可視化することができる.図1.2にPancreum の外観を示す.
図1.2: Pancreum
引用: http://sankarsdotnet.blogspot.jp/2013/04/pancreum-wearable-artificial-pancreas.html
合わせたアドバイスを提供する.睡眠,運動,食事,生体情報など,測定する情報が多ければ多いほど, Smart Coach が的確なアドバイスを提供できるようになる.図1.3にJowborn UP3の外観を示す.
図1.3: Jowborn UP3
引用: http://www.devicetowear.com/jawbone-up3-smartband-delayed-2015/
1.1.2 Home automation
Home automationとは,これまで家の中で行ってきた家事や家電操作といったさまざまなタスクを自動化しよ
うとする動きである[6].旧来のHome automationでは,大規模工場やビルなどで用いられていた自動化技法(証 明や室温の環境制御,扉や窓などの開口部制御,防犯火災のためのセキュリティシステムなど)を個人宅へ応用 したものであった.例えば人間が部屋に入ったことを感知して証明をつけたり,人間が近づいたことを感知して 扉を開閉したり,人間の侵入を検知して警報を鳴らすといったものである.近年ではインターネットの普及から Internet of Things(IoT)[10]に注目が集まっている. IoTとは日本語で‘もののインターネット’と呼ばれ,これま でネットワークに繋がることのなかったデバイス,例えばエアコン,冷蔵庫といった家電であったり,今までに はなかった全く新しいデバイスなどがネットワークを形成,インターネットに接続することによりスマートフォ ンを通してリモートで家電を操作したり,これまでにない新しいサービスを提供する動きである.なお, Home
automationはスマートハウス,インテリジェントハウス,ネット住宅などと呼ばれることもあるが,本論文では
それら全てHome automationと呼ぶこととする.以下にいくつか代表的なHome automationの例を示す.
Panasonic Smart App
PanasonicのSmart AppではPanasonicが提供するスマート家電とアプリが連携することによりスマート家電
ごとにさまざまなサービスを提供している[16].例えばPanasonicのSmart App対応エアコンとSmart Appが連 携することにより,スマートフォンをエアコンのリモコン代わりにして操作したり,エアコンのそばにいなくて もネットワークを通じてエアコンを操作するといったことが可能になる.また,音声認識を使って声でエアコン を操作したり,部屋の温度を日〜月ごとにグラフに可視化して電力を無駄に使っていないかどうかを確認する といったことも可能である.他にも炊飯器,冷蔵庫,レンジ,クッキングヒーター,洗濯乾燥機,加湿空気清浄機,
体組成バランス系,血圧計,活動量計などさまざまなデバイスとアプリを連携させることでさまざまなサービス を提供している. Panasonic Smart Appのイメージを図1.4に示す.
図1.4: Panasonic Smart Appのイメージ
引用: http://panasonic.jp/pss/
SmartThings
SmartThingsはドアロックや照明,エアコン,ヒータなど家にあるありとあらゆるものを一括で管理できるア
プリとデバイスである[17].SmartThingsは大きく3つのパートからなる. 1つ目はSmartThingsで提供している 各種デバイスである.基本的にSmartThingsではHome automationがなされていない普通の家をスマート化しよ うというものがコンセプトにある.つまり,ネットワークに接続されていないものをネットワークに接続し,セ ンサが搭載されていないものにセンサを搭載する必要がある.そのためにSmartThingsではいくつかのデバイス を提供している. SmartThingsで提供されているデバイスに開閉感知センサがある.これは窓やドアといった開 閉を行なうものに対し装着するデバイスで,これを装着することで窓やドアに開閉を感知する機能を持たせて いる.図1.6に開閉感知センサの外観を示す.
その他にもユーザやそのペットが家にいるかどうかをセンシングするデバイス,ものの動きを検知するデバ イス,電源のオンオフを行なうデバイスなど様々なデバイスがある.そしてこれらをまとめあげるハブとなるの
がSmartThingsHubである.このデバイスと各種センサデバイスが強調することで家のあらゆるもののスマート
化を実現している.各種センサデバイスとSmartThingsHubの外観を次に示す.
図1.5: SmartThings Hub
引用: http://www.smartthings.com
図1.6:開閉感知センサ
引用: http://www.smartthings.com
図1.7:家にいるかどうかをセンシングするデバイス
引用: http://www.smartthings.com
図1.8:動きを検知するデバイス
引用: http://www.smartthings.com
図1.9:電源のオンオフを行なうデバイス
引用: http://www.smartthings.com
Electric Imp
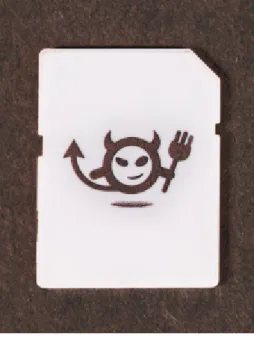
Electric Impはあらゆる電気/電子製品をインターネットに接続するためのインタフェースである[1].Home
automationを実現する際の1つの問題点として各ベンダ独自のソフトやハードでネットワークに接続される点
が挙げられる.それを解決するのがこのElectric Impである. Electric Impの基本的なアイデアは,それぞれの製 品に独自のソフトやハードを盛り込んでネットに接続するのではなく,ネット接続部分は製品から完全に切り 離して,かつ完全に汎用化,普遍化することである. Electric ImpはSDカードのような形をしており,この中に WiFi機能と専用のプロセッサを内蔵している.このプロセッサに対するプログラミングで, Electric Impが導入 された製品のあらゆる機能を操作するというものである.図1.10にElectric Impの外観を示す.
図1.10: Electric Imp
引用: http://www.designboom.com/technology/electric-imp-for-the-internet-of-things/
Home OS
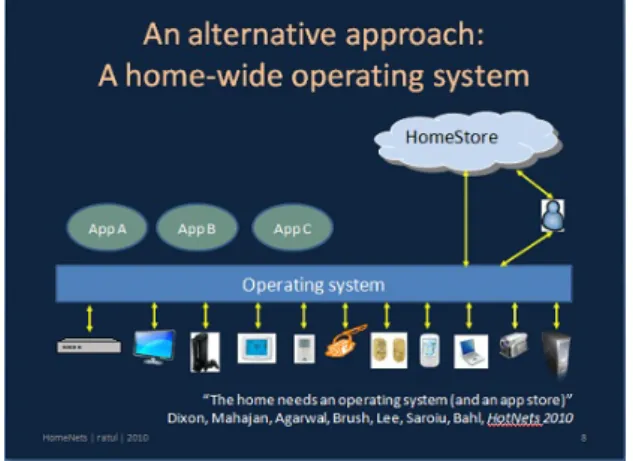
HomeOSはMicrosoft Researchが提唱するホームオートメーションオペレーティングシステムである[7].家
にOSを導入し,その上で様々な家電やデバイスを動かすことによりスマートフォン, PCとの連携をシームレス に行なう狙いがある.現在は商品化の段階までは至っておらずプロトタイプだが,将来的には大きな可能性を秘 めている.図1.11にHomeOSの概略図を示す.
図1.11: HomeOS概略図
引用: http://www.he-inside.ch/homeelectronic/inside/index.asp?QString=43,0,4661,0,0&View=full&UID=
1.2 研究の動機と目的
1.1節で述べたように, Quantified selfとHome automationは近年のスマートフォンの浸透やウェアラブルデ バイスの台頭, IoTの出現により存在感を増している.一見関わりのないように見える両者であるが,これらが最 終的に目指すところは私生活におけるあらゆる活動の自動化・最適化である.この両者の考え方を組み合わせ ることにより,既存のQuantified selfとHome automationを超えた自動化・最適化ができないかと考えたのが本 研究の動機の発端である.
1.2.1 Quantified self の Home automation への適応
既存のQuantified selfでは,ライフログの収集と可視化が主な目的であった. つまり,収集・可視化したデー
タをどのように使用するかはユーザに委ねられているという状況である.また既存のHome automationでは例 えば, ‘人が部屋を出たことを検知して電気を消す’であったり, ‘朝起きたことを検知してカーテンを開ける’と いった, 2値的な事象をセンシングしてトリガとしなんらかのアクションを起こすものが多かった.本研究では
Quantified selfとHome Automationを組み合わせることにより,各々が抱える問題を補完しあえるのではないか
と考えた.例えばユーザの入眠時間,起床時間,睡眠状態をセンシングして日々のログを溜め,それらのデータを 元に睡眠を最適化することにより, ‘朝起きた’から‘カーテンを開ける’のではなく, ‘ユーザが目覚めるべき時 間’に‘カーテンを開ける’といったことが可能になる. Quantified self + Home automationの考え方は睡眠の最 適化だけでなく消費ガス・電力の最適化や照明管理,空調管理といった日常生活の幅広いシーンに応用できる 可能性を秘めている.本研究ではQuantified self + Home automationの例を示す1つのケーススタディとして,ラ イフログを用いた空調管理に取り組む.人間の体感温度は個々人によって異なり,同じ室温でも人それぞれ感じ 方が異なる.ライフログを用いてその個々人にとって最適な室温をコンピュータが推定し空調を管理すること ができるかを検証する.
1.2.2 心拍数を用いた空調管理
1.2.1でケーススタディとしてライフログを用いた空調管理に取り組むことを述べたが,本研究ではライフロ
グとして心拍数を用いる.詳しくは2章で述べるが,人間の体感温度は代謝量によることが分かっており,代謝 量が増えると心拍数も上がることも分かっている.このことから本研究では心拍数の変化から,ユーザが快適に 感じる室温を推定できるのではないかという仮説を立てた.本研究ではまず仮説を検証するためにデータ収集 実験を行い,重回帰分析とディープラーニングの手法を用いて心拍数と快適な室温についての関係性を確認し た.次にその関係性を用いて得られた解析結果を元に空調を操作し,システムがユーザの心拍数から自動的に快 適な室温を推定できるかを検証した.
1.2.3 空調最適化による社会への貢献
心拍数による空調最適化が可能になることで,自分で空調を操作することが難しい人々,例えば乳幼児や寝た きりの方などが過ごしやすい空調空間を作り出すことができる.また,部屋の中に複数人の人間がいる場合など では,他の人に気を使い部屋の温度を操作しづらいといった心理的な障壁がある.ここで空調最適化を行い各人 が快適と感じる温度の平均へ温度を操作することができれば,そうした心理的ストレスを感じることなく部屋 の温度を快適に保つことができる.
1.3 論文の構成
本論文の構成は以下のようになる.
第 2 章 空調
人間の温度を感じる仕組み,空調に用いられる技術について述べる.
第 3 章 ディープラーニング
本研究で用いた機械学習の方法論ディープラーニングについて述べる.
第 4 章 関連研究
本研究に関連する研究について述べる.
第 5 章 実験と評価
本研究で行った実験とその評価について述べる.
第 6 章 考察
本研究で得られた結果より考察を述べる.
第 7 章 将来課題
将来的に解決すべき課題について述べる.
第 8 章 結論
本研究の結論について述べる.
第 2 章 空調に関する背景知識
本章では実際に空調管理に用いられている製品や知見について述べる.
2.1 暑さ・寒さを感じる仕組み
ここでは人間が暑さ・寒さを感じる基本的な仕組みについて述べる.
2.1.1 体温調節
人間が暑さ・寒さを感じるのは,人間が恒温動物だからである.恒温動物とは,体温が外気温に依存せず一定 の動物のことを指す.逆に体温が外気温の影響を受け変化する動物を変温動物と呼ぶ.人間はその生命を維持す るために体温を36.5℃前後に保つ必要がある.体温が急激に変化すると,体を構成する細胞に異常をきたして適 切な体温を制御する機能が狂ったり,体の代謝が鈍くなり筋肉や内蔵を機能させるためのエネルギーが減少し たりする.暑さと寒さを感じるセンサはこうした異常事態を避けるためのアンテナとして備わっている.
次に,体温調節について説明する.体温の上昇を抑えるのは皮膚表面からの放熱と皮膚からの汗の蒸発により, 体温の低下は筋肉や内臓などの動きから生じる発熱による.このように人間は暑い時は熱を放出し,寒い時は熱 を体内で作り出すことで熱のバランスを整えている.放熱と産熱による1日の熱量を表2.1と表2.2に示す.
表2.1: 1日の放熱量
放熱の種類 放熱量[kcal]
皮膚表面からの放射による放熱 1181 空気の対流と伝達による放熱 833
汗の蒸発による放熱 558 摂取した食物を温める 42l
呼気を温める 35
その他 51
表2.2: 1日の産熱量 産熱の種類 産熱量
骨格筋 1570kcal
肝臓 600kcal
呼吸筋 240kcal
腎臓 120kcal
心臓 110kcal
その他 60kcal
合計 2700kcal
を発生させる.このインパルスが脳に伝達することにより,人が熱い・冷たいという感覚を覚える.温点は神経 遅順応性という特性を備えている.これはすなわち温点は温度変化を完治するセンサとして働くということで ある.最初は熱いと感じたお風呂のお湯が時間が経つにつれ熱く感じなくなるのはこの特性によるものである。
2.1.3 温感を左右する要因
暑さや寒さの感覚,温感は,複数の要因から決定される.主な外的要因としては温度・湿度・気流が挙げられ る.人体側の要因としては着衣量や代謝量が挙げられる.表2.3に温感に影響を与える要因を示す.
表2.3:温感に影響を与える要因 環境側の要素 人体側の要素
気温 着衣量 湿度 代謝量 気圧 接触温熱感
このように温感を左右する要因は外的要因と人体の要因に分けられるため,同じ空間内にいる人間でも暑さ・
寒さに対する感覚(体感温度)が全く異なるといったことが起こりうる.ここで本研究に大きく関わりのある代 謝量について述べる.人間の代謝量は筋肉量に依存しており,一般に女性よりも男性,身体が小さい人より身体 が大きい人(正確には身長と体重から計算される体表面積の大小)が代謝量が大きくなる.代謝量が多いという ことはすなわち,産熱力に優れているということである.産熱力に優れる人間はそうでない人間より暑がり(外 気温が低くても自分で熱を生み出すことができるから)であるので,同じ空間にいても体格や性別,年齢の違い により体感温度の違いが生まれる.このように作業をしていない状態で人間が生み出す代謝量を基礎代謝量と 呼ぶ。
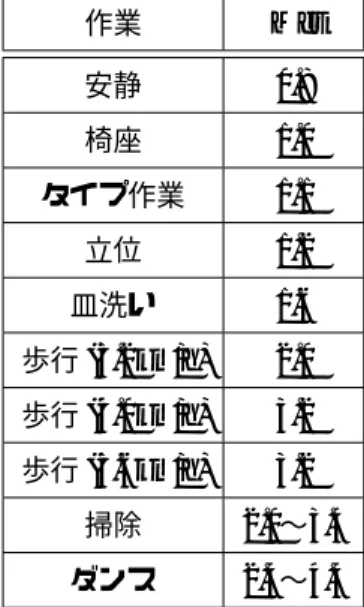
また,代謝は人間の作業量にも大きく依存する.作業量は運動強度を表すMetという単位で示される.安静状 態が1,座っての事務作業が1.2,早い歩行が3.0〜4.0Met程度と言われている.快適と思われる温熱条件下では, 1Metの差は約6℃に相当する.例えば同じ空間においても,たって軽作業する人間(1.6〜2.0Met)と安静にする
人間(1.0Met)では約4〜6℃の体感温度の差があることになる.作業とMetの関係を表2.4に示す.
表2.4:作業ごとのMet値 作業 Met 安静 0.8 椅座 1.0 タイプ作業 1.1 立位 1.2 皿洗い 1.6 歩行(3.2km/h) 2.0 歩行(4.0km/h) 3.2 歩行(5.6km/h) 3.2
掃除 2.0〜3.4
ダンス 2.4〜4.4
2.1.4 屋内と屋外の温度差
2.1.1項で述べたとおり,人間は暑さよりも寒さに敏感な動物である.すなわち人間は冷房による影響を受け
やすくできている.冷やし過ぎによる症例としては疲労や気だるさ,手足などの身体末梢部分の冷え,頭痛,神経 痛,胃腸障害,女性の生理障害などがある.これらを予防するために注意すべきなのが屋外と屋内の温度差であ る.冷やし過ぎによる症例を防ぐには,屋外と屋内の温度差をなるべく小さくするのが良いと言われている(一 般に5〜7℃差程度).
以上のことから人間が暑さと寒さを感じる仕組みについて次のようにまとめることができる.
暑さについて
• 気温が一定状態で安静にすれば,それほど暑さは感じない
• 周囲の温度や風により,皮膚表面から放熱すれば暑さを低減できる
• 汗の蒸発により暑さを低減できる
寒さについて
2.2.1 人間の動きを感知した空調管理
三菱電機株式会社が販売するルームエアコン霧ヶ峰では人間の動きや活動量を検知して省エネ運転を行なう ことができる[23].霧ヶ峰は本体中央部に縦に8個並んだセンサーを搭載し,これが左右に動き室内を94分割, 部屋全体の温度を752メッシュで計測する.これによって従来のような壁,床や人がいる場所の温度を監視する 以外にも,部屋の人がソファに座っているのか,動き回っているのかといった活動状況も検知できるようになっ た.この機能を用い,人が動き回っていて体感温度が高い場合は,暖房運転をセーブしたり,また昼寝や読書中な ど,動きが少ない場合は冷房を抑えるなどの省エネ運転を行なうことが可能になっている.
省エネ運転モードは,リモコンを用いて‘葉っぱ1枚’, ‘葉っぱ2枚’, ‘葉っぱ3枚’モードの3段階に調節が できる.葉っぱの数が増えるほど省エネ効果が大きくなり,床と部屋の温度を検知する‘葉っぱ1枚’モードで は,ムーブアイOFF時より約30%の省エネ運転となる,人を感知する‘葉っぱ2枚’では,最大40%の省エネと なる.更に人の活動量を測定し,体感温度を重視した運転の‘葉っぱ3枚’では,最大50%の省エネ運転になる.
さらに,室内で人がよく位置する場所を学習し,空調エリアを効率よく温める‘ECOムラなし運転’も搭載 し,部屋を無駄なく快適に空調できる.また,室内に人がいなくなると,自動で省エネ運転を行なう「不在省エネ 運転」モードも備えている.
霧ヶ峰のムーブアイ機能のイメージ図を図2.1に示す.
図2.1:ムーブアイ機能のイメージ図
引用: http://www.mitsubishielectric.co.jp/home/kirigamine/forte/comfort.html
2.2.2 サーキュレーション気流
DAIKINが販売するルームエアコンうるさら7ではサーキュレーション気流を用いて素早く部屋の温度を変
化させることを実現している[20].サーキュレーション気流とは,エアコンから出た気流が部屋を巡って一周し またエアコンの中へ戻っていくDAIKINが開発した循環気流である.従来のただ送風するだけのエアコンでは 部屋全体が均一な温度になるまで時間がかかるという問題点があったがサーキュレーション気流を用いること で部屋の中の空気を循環させ,室内の温度を素早く均一な温度に設定することができる.
サーキュレーション気流を実現するためにうるさら7では天井に沿って気流を送り出すコアンダ構造と,本 体下部に気流を吸い込む構造を持っている.サーキュレーション気流を実現する構造を図2.2に示す.
図2.2:サーキュレーション気流を実現する構造
引用: http://www.daikinaircon.com/roomaircon/13 6 01/kiryu/index.html?ID=roomaircon 13 6 01 setsuden aircon
2.2.3 気流の通り道を検知し送風
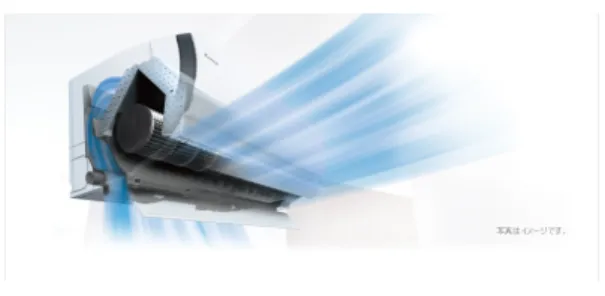
日立製作所が販売する白くまくんは気流の通り道を見つけ,そこへ送風することでより快適な空調状態を実 現している[26].白くまくんにはソファやテーブルなどの位置や形状を検知するものカメラ,間取りや人の位置, 活動量を検知する画像カメラ,人や周囲の温度を見る温度カメラが搭載されている.これらのカメラから得られ る情報から部屋を立体的に捉え,気流の通り道を見つける.冬は足元へ温風を届け暖かく,夏は冷風を効率よく 循環し部屋を涼しくしている.図2.3に気流の通り道を見つける機能をONにした時とOFFにした時の違いを 示す.
図2.3:気流の通り道を見つける機能をOFFにした時
引用:
http://kadenfan.hitachi.co.jp/ra/lineup/xseries e/?accordion=feature- 1#feature-1
図2.4:気流の通り道を見つける機能をONにした時
引用:
http://kadenfan.hitachi.co.jp/ra/lineup/xseries e/?accordion=feature- 1#feature-1
2.2.4 Nest Thermostat
図2.5: Nest Thermostat
引用: https://nest.com/
Nest Thermostatと本研究はユーザの嗜好を学習し,空調管理の自動操縦を行なうという点で類似性がある.相
違点は, Nest Thermostatがユーザの行動パターンを学習して自動操縦を行なうのに対し,本研究ではユーザの心 拍数からユーザの好みの温度を推定し,自動操縦を行なう点である.心拍数を用いて空調管理を行なうことによ り,行動パターンによる自動操縦に比べより柔軟な空調最適化ができると考えられる.
第 3 章 データと解析手法
本章では収集したデータの種類とデータ収集に関する実験,収集したデータの解析手法と解析結果について 述べる.
3.1 解析手法
本節ではデータの解析に用いた手法についての説明を述べる.本研究では解析手法として,重回帰分析とディー プラーニングの種々の手法を用いた.本研究は人間の心拍数から体感温度を推定し空調最適化に活かすという これまでにない新しい取り組みである.よってどのようなデータをどのような解析手法を用いて解析すればよ り良い結果が得られるか不透明だったため多くの手法を試しどの解析手法を用いるべきかを探った.
3.1.1 重回帰分析
重回帰分析は回帰分析の手法の1つであり,複数の量的,質的変数Xと1つの量的の変数Yの間にある関係 式を推定する方法である.説明される変数Yを従属変数,被説明変数,目的変数などと呼ぶ.また,説明する変数 Xを独立変数,説明変数などと呼ぶ.
回帰分析の目的はXとYの関係を求めることであるが,同じくXとYの関係を探る相関分析とは異なりY をXで説明しようとする点を注意する必要がある.YとXの関係を表す関係式は一般に,
Y=β1+β2X2+...+βnXn
の形で表される.これを回帰方程式と呼び,係数βiを回帰係数と呼ぶ.
ここで,ある与えられた観測データのi番目のデータの目的変数をYi,説明変数をXiとすると Yi=β1+β2Xi2+...+βnXin+εi
と表現できる.この式を母回帰方程式と呼ぶ.母回帰方程式の末尾の項は誤差項と呼ばれ,次の条件を満たす 必要がある.
を最小とするような回帰係数を選ぶ方法である.誤差項を二乗にしているのは符号の違いを吸収し誤差のみ を取り出すためである.
Sを最小にする回帰係数は一次の偏微分を0とおいた方程式群
∂S
∂β1
=−2
∑
(Yi−(β1+β2Xi2+...+βnXin)) =0∂S
∂βk
=−2
∑
(Yi−(β1+β2Xi2+...+βnXin))Xik=0を解くことによって求めることができる.これによって求められる方程式 Y˙=β˙1+β˙2X2+...+β˙nXn
を標本回帰方程式,回帰係数を標本回帰係数と呼ぶ.
決定係数
このようにして求めた標本回帰方程式がどの程度よくはてはまっているか,すなわちどの程度説明変数Xが 目的変数Yを説明しているかを測る指標に決定係数η2が用いられる.Yiのばらつきの総和はXiの回帰方程式 の変動で説明できる部分と説明できない部分に分けられる.すなわち
∑
(Yi−Y¯)2=∑
(Y˙i−Y¯)2+∑
(Y˙i−Y¯)2が成り立つ.決定係数η2はYiの変動のうちXiの回帰方程式で説明できる変動の割合であるから η2=1−∑(Y˙i−Y¯)2
∑(Yi−Y¯)2=∑(Y˙i−Y¯)2
∑(Yi−Y¯)2
で定義される.η2は0〜1の間の数であり, XがYを完全に説明する時1,全く説明しない時0となる.あては まりの良い回帰直線とあてはまりの悪い回帰直線の例を図3.1に示す.
図3.1:あてはまりの良い回帰直線と悪い回帰直線の例
偏回帰係数の統計的推定
ここまでで求めた標本回帰係数は得られた観測値から推定したものであり,母回帰係数とどの程度一致して いるのかがわからない.標本回帰係数が信用できる値なのかどうか,検定する必要がある.標本回帰係数の検定 にはt検定が用いられる.
t検定を行なうため,まずは標本回帰係数の標本分布を求める.誤差項に関する仮定3.1.1に加え各誤差項が独 立で共通の正規分布N(0,ρ2)に従うとする.標本回帰係数β˙iは正規分布に従っている誤差項の線形関数である から,その標本分布は次の正規分布に従う.
N(β2, ρ2
∑(Xi−X)¯ 2)
ρ2は未知であるから,回帰残差を使って標本から推定する. ˙βiの標準誤差は
s.e.(β˙i) = s.e.
√∑(Xi−X)¯ 2
で表せられる.
これを用いて標本回帰係数のt検定を行なう.帰無仮説を
H0:βi=a(aは特定の定数) とし,対立仮説を
H1:βi̸=a(両側検定),またはH1:βi>a(片側検定) とする.この時βiのt値は
ti= β˙i−a s.e.(β˙i)
となる.このt値を自由度 n-2のt分布のどこに位置するかを計算しパーセント点を求め, 両側検定では
|ti| ≥ta/2(n−2)のとき,片側検定では|ti| ≥ta/2(n−2)のとき,帰無仮説を棄却し,それ以外は棄却しない.この ようにして得られた標本回帰係数が母回帰係数と比べ妥当かどうかを判断する.ここで妥当ではないと判断で きれば,その説明変数をモデルから除外することができる.
AIC
t検定以外にも説明変数を選択する方法として赤池情報量基準(AIC)がある[25].AICは母回帰係数を推定し ようとする,つまり,実世界をよく表現しているモデルを探すという判断基準でなく,より良く予測できるモデ ルを探すという判断基準で用いられる指標である.観測データ数が限られている状態では,無理に真のモデルを 探索するよりも単純なモデルを選ぶ方が予測精度が高くなることが分かっている.
ディープラーニング
特徴
ディープラーニングの特徴として,従来の機械学習の手法では不可能であった特徴量の抽出が行えることが 挙げられる.音声認識や画像認識といった分野ではまずその音声,画像がなんであるかを特徴付ける特徴量を取 り出す必要があり,これは経験と勘が要求される作業であった.ディープラーニングではこの作業自体を機械に やらせることができる(図3.2).
図3.2:画像認識研究のパラダイム変化
引用:貴之岡谷.ディープラーニング(技術解説).
分類自体はSVMに代表される機械学習の手法によりそれほど難しい問題ではなくなったが,この特徴量の抽 出は依然として機械学習の世界で大きな問題点となっていたため,ディープラーニングの登場は機械学習の世 界に大きなインパクトを与えた.
基礎理論
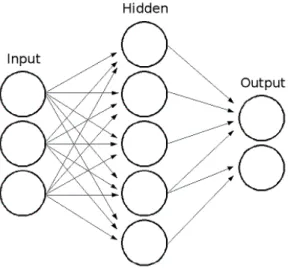
ディープラーニングの基礎的な考え方はニュ−ラルネットワークと呼ばれる生物の情報処理のメカニズムを 模した機械学習の手法に端を発する.人間や動物はたやすくパターン認識を行っているので,その仕組みを模倣 した計算機構が機械学習のニューラルネットワークである.生物の情報処理はニューロンと呼ばれる神経細胞が 相互に結合したネットワークによって行われている.それぞれのニューロンは,結合しているニューロンから出 力される電気信号に正または負の重みをかけた信号を受け取り,その和が一定値に達す売れば自分も電気信号 を発するという動きをする.このユニットを多数結合したものをニューラルネットワークと呼ぶ.生物の神経細 胞ネットワークにはフィードバックが存在することがわかっており,かなり複雑な構造を持っている.しかし,パ ターン認識に適用するニューラルネットワークは,一般には図3.3に示すような単純な階層構造で作成される.
図3.3:ニューラルネットワークの階層構造
ニューラルネットワークではこれら層間の重みを更新することで分類器を作成することになる.ここでは入力 から出力まで1方向のみに信号が伝搬する複数層を持つフィードフォワード型の最も基本的なニューラルネッ トを説明する.その内のある階層のj番目のユニットに着目する.以降このユニットをjと呼ぶ.(図3.4)
hj p=f(hj p)
となる.活性化関数fには,生体のニューロンの入出力応答をシミュレートしたシグモイド関数f(x) = 1
(1+e(−x))
が昔から使われているが,最近は f(x) =max(0,x)という関数(Rectified Linearと呼ぶ)がより一般的である.
このようにある層の出力が次の入力となり,最後の層から結果を出力する.なお,解きたい問題がクラス分類 の場合には,最後の出力層のみ特別に,目的のクラス数nと同数のユニットを配置する.その上でこれらのユニッ トの出力を,それらへの入力xj(j=1...n)を元にしたソフトマックス関数
pj= exj
∑nk=1exk
とする.これらのp1〜pnは, n個のクラスに対する尤もらしさとなり,入力を分類する時はpjが最大値を取 るクラスjに分類する.
例えば画像認識にニューラルネットを用いる場合,画像と正解ラベルがペアになった学習サンプルを多数用 意する.このサンプルの画像をニューラルネットワークに入力した時の出力と,正解の出力のずれを誤差Cとし て定義し,これを小さくすることを考える.具体的には目標とする出力d1, ....,dnと,実際の出力p1, ...,pnの乖離 を,交差エントロピー
C=−
∑
nj=1
djlogpj
によって測る.目標出力d1, ...,dnは正解クラスjのみdj=1となり,それ以外の全k(̸=j)ではdk=0となる ようにとる.
このように定義したCの最小化には,勾配降下法が一般的に用いられる.規模の小さなニューラルネットでは, より使い勝手の良い準ニュートン法を用いることが一般的だが,大規模なディープネットでは今でも勾配降下 法が今でもよく使われる.
勾配降下法では,重みやバイアスに関する誤差勾配を計算する必要がある.これは活性化関数が層の数分だけ 入れ子になった合成関数の微分を計算することになり,出力層に近い層では簡単だが,出力層から離れた深い層 では煩雑になる.これを系統的に行えるようにしたのものが誤差逆伝搬法である.活性化関数の合成関数の微分 で生じる連鎖規則を,数値計算の内部に組み入れることで,出力層での各ユニットの誤差を,出力層に近い側か ら逆向きに伝搬していくアルゴリズムである.
なお,誤差Cは全学習サンプルに対して評価する(バッチ処理)でなく,数個〜数百程度のサンプル集合(ミニ バッチ)に対して評価する方法が取られる.サンプルをランダムに選んでミニバッチとすることで,大域的な収 束性を得る(確率的勾配降下法).重みとバイアスの修正は,このミニバッチごとに一度ずつ行なう.最も一般的 には
∆w(i)i j =−ε ∂C
∂w(i)i j
+α∆w(ti j−1)−eλw(t)i j
のように修正する.個々で∆w(i)i j と∆w(i)i j はそれぞれ今回と前回の重み更新時の修正量を表す.右辺第1項は 誤差勾配の項で,εは学習係数と呼ばれ,勾配降下のステップ幅を決定する.第2項はモメンタムと呼ばれ,前回
修正量のα(〜0.9)倍を今回の修正量に加算することで,ミニバッチの選択に伴う修正量のランダムネスを抑え
ることができる.第3項は重み減衰項と呼ばれ,重みが過大に大きくならないようにする働きがある.
これらのパラメータε,α,λはうまく選ぶ必要がある.実際これらは学習の行方を左右する.特に学習係数εに ついては,ある程度大きな値(例えば,ε〜0.01)から開始し,学習の進展と共に1/10にすることを何度か行なう のが一般的である.
一般的なニューラルネットは2〜3層である.これを何層にも重ねあわせた深いニューラルネット(ディープ ネット)がディープラーニングにおける基本形となる.このディープネットに様々な手法を適応しあらゆる分野 へ応用する方法論がディープラーニングである.
Auto Encoder
ディープラーニングの隆盛はニューラルネットにおいて過学習を回避できるようになったことに起因する.過 学習とは,学習サンプルに対し適応しすぎるあまり汎化性能を失っている状態である.ニューラルネット自体は 1980年代にはすでに知られていたが,ニューラルネットは過学習を起こしやすく,それを克服する方法がなかっ たため近年まで注目されていなかった.しかしHintonらが発明したAuto Encoder(AE)と呼ばれる手法を用いた プレトレーニングによりこの過学習を回避できることを発見した[5].
一般にディープネットを誤差逆伝搬法で学習する場合,今までネットワークの層間の重みはランダムに初期 化していた. Hintonらはこの初期化に注目し,過学習が起こる原因は重みの初期値が適切でないことに起因する と主張した.そして適切に重みを初期化することができれば,過学習も回避できることを発見した.
彼らの方法は,目的とするディープネットを2層ずつに分割し,各2層ネットを別々に(しかし入力層側から 順番に1つずつ)訓練する.各層の訓練はそれぞれAEと呼ばれる手法で訓練を行った.
AEとは入力に対する出力がなるべく入力に近くなることを理想とするシステムである.入力xから出力yを 計算する時(図3.5左),これと逆向きの計算,つまり出力yを入力x’に戻すような計算を新たに考える.この1 連のx→y→x’→の計算は元のネットを出力で折り返した,図3.5右のような構造の2層ネットで表現できる.こ の2層ネットが個々の入力になるべく近い出力を返すように2層の重みを決定する.
図3.5: Auto Encoderによるプレトレーニング
引用:貴之岡谷.ディープラーニング(技術解説).
である.そこでAEが各入力を再現する際,中間層のユニットのうち少数しか使用されないように制約を加えて 学習を行なう.中間層のユニットがまばらにしか活性化しないことからスパース正則化と呼ばれる.
また,過学習を防ぐ手法としてDropOutが挙げられる. DropOutではディープネットの50%程度をランダム に情報伝播しないようにして過学習を防ぐ手法である. DropOutをAEと組み合わせることでより高い汎化性 能を実現することができる.
以上のAEによる学習を順番に重ね合わせることでディープネットを構築していく. 1層目のAEには元の ディープネットの学習サンプルをそのまま入力する.そして1層目の出力を2層目のAEの入力とし, 2層目の 出力を3層目に...というようにネットワークを構築する.このようにして得られた各層の重みが元のディープ ネットの初期値となる.なお,最後の層だけは従来通りランダムに初期化する.このように実際の学習を行なう 前に教師なし学習を行い重みの初期値を求めることをプレトレーニングと呼び,実際の学習をファインチュー ニングと呼ぶ.このようにして初期化されたディープネットを用いて従来通り誤差逆伝搬法を使った学習を行 なうことで過学習を回避することのできるディープネットを作成することができる.
Restricted Boltzmann Machine
Deep Learningのプレトレーニングにおいてオートエンコーダと双璧をなす手法がRestricted Boltzmann Ma-
chine(RBM)である[12].このRBMをオートエンコーダのように多層に重ねたものをDeep Belief Network(DBN) と呼ぶ.オートエンコーダでは入力から出力が決定論的に決まるが, RBMでは確率論を用いた生成モデルの構 築を行なう.
RBMは可視層と隠れ層の2層のネットワークを構築する.可視層にデータを入力することで隠れ層に入力デー タの特徴をよく表すパラメータが現れる.同層内のリンク結合はなく,異層のみ結合している.通常のBoltzmann
Machineでは全ての要素が結合していることによる計算量の爆発が問題であった.これを解消するため要素間の
結合を制限(Restricted)することで計算量を現実的なレベルまで落としたものがRBMである.
2値のRBMを解く問題では次のようなモデルが用いられる.
E(v,h) =−
∑
ibivi−∑
jcihj−∑
i∑
jviWi jhi jp(v,h) = 1
Z(W)exp(−E(v,h))
RBMはこのp(v, h)の最尤推定を行なう.対数尤度に対する任意の勾配
∂J
∂θ =−
∑
v∑
h∂∂θEp(h|v)q(v) +∑
v∑
h∂∂θEp(v,h)ただし,q(v) = 1
N
∑
kδ(v−vk)を計算する必要がある.
Boltzmann Machineに比べ計算量が少ないとは言え,この計算は第2項が莫大な計算量になる.ここでサンプ
リングを使い近似的に第2項を求める.RBMで用いられるサンプリング手法がContrastive-Divergence法である [5].
Contrastive-Divergence法(CD法)はHintonらが考案した勾配法を少ない計算量で行わせるサンプリング手法
である.CD法では観測データセット経験分布を可視変数の初期分布とし,そこから交互に両層のサンプリング を行なう.そして得られたサンプリング点の標本期待値をRBMの期待値EB[...|θ]の近似値として確率的近似学
3.2 データ収集
本研究で用いたデータの種類と収集方法について述べる. 2.1.3項で述べた通り,人間の体感温度は室温,着衣 量,代謝量などに大きく依存する.本研究ではこれらの要因をセンシングし解析することで人間が快適と感じる 温度を推定し空調の最適化ができるのではないかと考えた.着衣量はシステムではアンコントローラブルなた め,室温と代謝量をセンシングすることとした.代謝量のセンシングであるが,多くの研究では人間の活動量を 推定するために加速度を用いることが多い.加速度を用いる理由として,加速度センサはスマートフォンなどの デバイスに組み込まれていることが多く利用しやすい点などが挙げられるが,本研究では心拍数を用いた.例え ば加速度センサだと,立っている状態でも座っている状態でも寝ている状態でも人間が動かなければセンサに 反応はなく,等しく扱われてしまう.しかし人間の代謝は運動量だけでなく姿勢によっても変化するため,そう した変化もセンシングすることができる心拍数を用いて代謝量を推定することとした.
3.2.1 収集したデータの種類
空調最適化を考えるにあたりどのような要因が体感温度に影響を与えるかは2.1.3項で述べた.このことから 本研究では次のデータを収集対象とした.
心拍数
代謝量を推定するために心拍数を収集対象とした.心拍数はその絶対値だけでなく変化も重要であると考え た.図3.6と図3.7に示すように,同じ心拍数100bpmであっても120bpmから100bpmになった場合と80bpm
から100bpmに変わった場合では体感温度に差が出ることが考えられる.更に言えば,図3.8,図3.9に示すよう
に同じ120bpmから100bpmになった場合でも下に凸の変化をした場合と上に凸の変化をした場合でも体感温
度に影響があることも考えられる.そのため心拍数はその絶対値だけでなく,その変化も要因として扱うため1 秒ごとに3分間計測した心拍数をひとまとまりとするフレームデータとして収集を行った.また,計測するタイ ミングであるが,データ収集実験において被験者が空調を操作したタイミングでの過去3分間の心拍数を収集 した.被験者が室温を操作した時点で被験者はその心拍数・心拍パターンにおいてはその室温に満足していな いと考えることができる.そして設定した室温こそその時点で被験者の求める室温であると考えることができ る.また,収集した心拍数データはノイズを除去するため3秒間で平均をとって平滑化した。そして,前後の値
から10bpm以上差がある場合は外れ値とみなし,その前後の値の平均値をその値とした.
図3.6:心拍数が80bpmから100bpmへ変化する様子 図3.7:心拍数が120bpmから100bpmへ変化する様子
図3.8:上に凸な心拍数の変化 図3.9:下に凸な心拍数の変化
室温
当然であるが,室温は体感温度に大きな影響を与える.例え心拍数が非常に高い状態,身体が非常に温まって いる状態であっても,室温が28℃と18℃では被験者が設定する温度に影響を与えることが考えられる.そのた め室温もデータとして収集することとした.なお、室温は被験者が空調を操作した時点での室温と、被験者が 何度に設定したかという設定温度の2種類を収集し,後者を目的変数(正解)として扱った.
3.2.2 データ収集実験
心拍数データを収集するために実験を行った.空調設備のある部屋の中で被験者にPCとBluetoothで接続す る心拍数計を着けてもらい,部屋の中で運動強度の異なるタスクを複数行ってもらった.被験者は自由に部屋の 空調を操作することができ,温度が不快であると感じた段階で空調を操作してもらうよう依頼した.被験者が空 調を操作した時点での過去3分間の心拍数データと変更前の室温,変更後の室温を収集した.
細かな実験の条件は次の通りである.
被験者
実験は19歳から62歳の男女10名に対して行った.被験者の性別と年齢を表3.1に示す.
表3.1:被験者の年齢と性別 年齢 性別
19 男性
19 男性
22 男性
23 女性
25 男性
25 男性
33 女性
52 男性
55 女性
62 男性
実験場所と実験時間
実験は4m四方程度の空調のついた密室の中で行った.被験者1人につき30分間実験を行った.
タスク
被験者には部屋の中で次のタスクを行ってもらった.行ったタスクと各運動強度を表3.2に示す.
表3.2:被験者に行ってもらったタスク
タスク名 運動強度(Met)
身体を横にして寝る 1.0 事務作業 1.1 部屋を歩きまわる 2.0 ダンスエクササイズ 2.4〜4.4
本実験ではPCやスマートフォンとBluetooth接続し心拍数や運動量を計測できるデバイスMio Linkを用い て心拍数の計測を行った.Mio Linkは従来の胸や腕につけるタイプの心拍数計と異なり,腕時計のように手首に 着けることができ非常に軽量である.Mio Linkの使うことにより被験者に負担をかけることなく,簡単に実験を 行なうことができる.Mio Linkの外観を図3.10に示す.
図3.10: Mio Linkの外観
引用: http://www.mioglobal.com/Mio-LINK-Heart-Rate-Band-Grey/Product.aspx?ProductID=14
このMio LinkとPCをBluetooth経由で接続し,被験者が空調を操作するたびに心拍数と室温を記録するシス
テムを開発した.このシステムはMio Linkから1秒単位で送られてくる被験者の心拍数をバッファに貯め続け る.被験者が空調を操作した段階でボタンを押すことにより被験者の過去1分間の心拍数をCSVファイルに保 存する.
このシステムを用いることで被験者の心拍数の収集を行った.システムの概観図を図3.11に示す.
図3.11:データ収集用システムの概観図
3.3 データ解析
3.3.1 重回帰分析を用いた解析とその結果
重回帰分析を用いて収集したデータを解析した.なお,重回帰分析による解析では心拍数を過去3分間のフ レームデータを扱うことができないため心拍数の変化を説明変数に加える事が出来ない。そこで室温変更時か ら30秒前の心拍数と変更時の心拍数を比較して上昇した,下降した,ほぼ等しいの3パターンからなる質的変 数を心拍数の変化とし,さらに室温を変更した時点での心拍数,変更前の室温を説明変数として加えた.そして 変更後の室温を目的変数として解析を行った.表3.3に解析結果を示す.
表3.3:重回帰分析による解析結果 説明変数 推定値 標準誤差 t値 p値
切片 36.3 1.39 26.2 2.00×10−16 心拍数 -0.0694 0.00845 -8.21 1.71×10−16 上昇ダミー -0.874 0.142 -4.26 3.23×10−3 下降ダミー 0.434 0.129 -3.59 2.35×10−3 変更前の室温 -0.306 0.0707 -4.33 5.57×10−5
これらの説明変数は全てp値が0.05以下で95%区間において有効と言える.この結果から心拍数が上がるほ ど被験者の求める温度は低く,下がるほど高くなることがわかる.また部屋の室温が上がるほど被験者が求める 温度は下がることがわかる.
3.3.2 ディープラーニングを用いた解析とその結果
重回帰分析では,過去のある点からみて上昇した,下降した,そのままという大雑把な心拍数の変化しか見る ことができなかった.そこでディープラーニングを用いた学習を行なうことで,空調最適化に有用な心拍数の変 化を特徴として抽出し分類器を作成した.入力は3.2節で説明した3分間の心拍数フレームデータと変更時の 室温,変更後の室温を加えた62次元のベクトルである.また,ディープラーニングは本来分類問題を解くための 手法であり今回のような温度,つまり量的変数を推定する手法ではない.そこで今回空調操作に使用される温度 (18℃〜28℃)を表3.4に示す温度クラスに分類し,どのクラスに属するかを判定する分類器を3.1.2項で述べ
たAuto encoder, DBNを用い作成した.なお,交差確認法を用いてテストデータによる分類器の検証も行った.表
3.5に各学習方法で作成した分類器とテストデータに対する正解率を示す.
表3.4:温度の正解クラス分け
第 4 章 空調最適化への応用
3.3節で得た各解析手法の解析結果を元に空調を操作し,全く空調最適化を行わなかった時と比較して被験者 の空調操作回数に差があるかを比較,定量的評価とした.また,実験後にアンケートを実施し被験者が最適化さ れた空調をどのように感じたかを定性的評価とした.本章では評価実験,アンケートの内容とその結果について 述べる.
4.1 実験概要
3.3節において心拍数と室温からユーザが快適に感じる温度の関係を推定することができた.ただしこのまま ではこの解析結果が実際に空調管理に使えるかは判断できない.本実験では3.3節で得られた解析結果(重回帰 分析と,ディープラーニングの手法で1番成績の良かったDBN)に従って実際に空調を操作し,全く空調を操作 しなかった場合に比べ被験者の空調操作回数にどの程度差が出るかを比較した.また,実験は部屋に1人だけ被 験者がいる場合と複数人いる場合で行い,それぞれの場合においてなんらかの違いが生まれるかを探った.実験 後に被験者へ空調に関するアンケート調査を行い,空調状態をどう感じたかを質問し定性的な評価として付け 加えた.
4.2 実験システム
上に述べた実験を行なうにあたりシステムを構築した.このシステムは大きくセンシングパートと解析パー トに分かれる.センシングパートで収集した心拍数と室温を解析パートに送り,解析パートが出力する室温を元 に手動で空調の操作を行った.実験システムの外観図を図4.1に示す.
4.2.1 センシングパート
センシングパートでは3.2.3項で用いたMio Linkを使用した. 3.2.3項でのデータ収集実験同様Mio Linkを BluetoothでPCと接続し,心拍数を収集した.
4.2.2 解析パート
解析パートではセンシングパートで収集した心拍数を平滑化し, 3.3節で作成した回帰方程式・分類器に入力 した.それらの回帰方程式・分類器が返した結果を元に実験者側が空調を操作した.心拍数は3分間区切りで1 分間に1回解析にかけ, 1分に1度空調を操作した. 1分に1度操作した理由は, 3分に1度空調を操作すると室 温の変化が被験者の代謝量の変化に追いつかないためである.
図4.1:実験システムの概観図
4.3 個人向け実験
本評価実験では 実験A
実験者側は空調を一切操作せず被験者側に操作権を委ねた.被験者が不快と思ったタイミングで空調を操 作してもらうよう頼んだ.
実験B
重回帰分析の結果を用いて空調操作を行った.また,被験者に不快と思ったタイミングで空調を操作して もらうよう頼んだ.
実験C
ディープラーニングの学習手法のうち最も成績の良かったDBNの分類器を用いて空調操作を行った.ま た,被験者に不快と思ったタイミングで空調を操作してもらうよう頼んだ.
の3種類の実験を行った.また,それぞれの実験に対して個人,複数人を対象にした実験も行ったため,計6種 類の実験を行ったこととなる.
![図 1.1: Nike FuelBand 引用: http://www.nike.com/jp/ja jp/c/nikeplus-fuelband Pancreum Pancreum はユーザの腹部に装着するタイプのウェアラブルデバイスである [14]](https://thumb-ap.123doks.com/thumbv2/123deta/9853527.1898460/11.892.381.567.113.199/図11Nike引用ユーザ腹部装着するタイプウェアラブルデバイスある.webp)