平成 24 年度 修士論文
椎間板負荷の非侵襲的な推定
指導教員 井上 喜雄 教授 芝田 京子 准教授 高知工科大学大学院 工学研究科 基盤工学専攻 知能機械システム工学コース 学籍番号 1155037 藤井 涼1 目次 第1 章 緒言 ... 2 1.1 研究背景 ... 2 1.2 研究目的 ... 2 1.3 脊柱の構造 ... 3 第2 章 腰痛診断の現状 ... 4 2.1 腰痛症の種類 ... 4 2.2 従来の姿勢変化の計測方法 ... 4 第3 章 提案する推定法の概要 ... 6 第4 章 精度検証 ... 8 4.1 精度検証の実験内容 ... 8 4.2 精度検証の実験結果 ... 12 第5 章 椎間板負荷の推定 ... 16 5.1 腰椎部の曲率半径の推定 ... 16 5.2 椎骨間の隙間の推定 ... 17 5.3 椎間板負荷の推定 ... 19 第6 章 椎間板負荷の推定実験 ... 20 6.1 椎間板負荷の推定実験内容 ... 20 6.2 椎間板負荷の推定結果 ... 24 第7 章 結言 ... 32 謝辞 ... 33 参考文献 ... 34
2
第1章 緒言
1.1 研究背景 日本では腰痛症に悩む患者が増加傾向にある.その背景として,高齢者の総人口に占 める割合が増加したこと.生活環境や労働環境の変化によりデスクワークなど長時間同 じ姿勢で仕事をする人が増えたことが挙げられ,若年層でも腰痛症で悩まされる人が増 えていることから年齢を問わない問題となっている. 腰痛症を引き起こす原因には姿勢の崩れからくるもの,前屈みになるなど腰椎部にか かる負荷が大きい姿勢を連続して行うなど様々ある.腰痛症の中でも代表的なものに腰 椎椎間板ヘルニアがある.発症する原因の一つとして,脊柱を構成する椎骨間の緩衝材 としての役割を果たす椎間板に過度な負荷が加わり,椎間板が突出状態となる.この状 態の椎間板が神経を圧迫することで痛みや痺れといった症状として現われる. 現在までに報告されている椎間板にかかる負荷を測定する有用な手法はスウェーデン の整形外科医であるNachemson(1)らが行った椎間板にセンサを直接挿入し様々な姿勢時 での椎間板にかかる圧力を測定した方法がある.この方法ならば,直接椎間板に加わる 圧力を測定するため高い精度が得られ,姿勢が変化していても測定可能である.しかし, 侵襲的な測定は外科手術を要するため限定された研究機関でしか行えない.椎間板付近 には人体に重要な脊髄神経が通っており,これを傷つける危険性があるため安全性に欠 けた測定法であることから広く用いることは困難である.また,非侵襲的な方法として レントゲンやCT,MRI など様々あるが,静止した姿勢での計測しか行うことができず, 定量的なデータの取得は難しいなどといった問題点が挙げられる. 1.2 研究目的 様々な姿勢や動作中での腰椎部の椎間板に加わる負荷を知ることができれば腰痛の診 断や予防法,治療法の進歩に非常に有用であり,整形外科分野の発展に大いに役立つも のと考えられる. 本研究は,3 次元動作解析装置を用いて身体に負担をかけない非侵襲的な測定法を提案 する.腰椎部の椎骨端部が背中の体表面に近い部分に存在していることに着目し,椎骨 端部の動きを 3 次元動作解析装置を使用することで外部から測定,その動きから椎骨間 の隙間を推定し,椎間板負荷を評価する方法を考える.これにより安全かつ容易に動作 中や運動中の椎間板負荷を測定することが可能になる. 本稿では提案する椎間板負荷の推定法を述べる.次いで提案する手法を用いて推定し た椎間板負荷とNachemson の実験結果を比較検討することで,本手法の有効性を検討す る.3 1.3 脊柱の構造 図 1.1 に示すように人間の脊柱は椎骨と椎間板が連続的に積み重なる構造となってい る.7 個の頸椎,12 個の胸椎,5 個の腰椎で構成されており,S 字カーブを描くように湾 曲しているため,頭部の重量を分散し支えることができている.それらの椎骨は硬く剛 体と見なすことができ,前方では緩衝剤の役割を担う椎間板,後方では左右の椎間関節 により連結されている. また,屈曲や伸展により,椎骨の位置が変化することで椎骨間の隙間が変化し,それ に伴い椎骨間に存在している椎間板も変形する.前湾が増加すると椎間関節への負荷が 増加し,逆に前湾が減尐すると椎間板への負荷が増加する.椎骨間の隙間が狭くなると, 椎間板に大きな負荷が加わることから,椎骨間の隙間変化がわかれば,椎間板の変形が 推測でき,椎間板負荷が評価できると考えられる. 図1.1 脊柱(2)
4
第2章 腰痛診断の現状
2.1 腰痛症の種類 症状の多い腰痛症の種類を簡単に挙げる. 腰椎椎間板ヘルニア 腰部脊柱管狭窄症 腰椎分離症・腰椎すべり症 姿勢性腰痛症 急性腰痛症(ぎっくり腰) 変形性腰椎症 腰椎捻挫 腰椎椎間板ヘルニアや脊柱管狭窄症は日常ごく普通に遭遇し,頻度の高い疾患(3)であり, その発症概念も明瞭である.姿勢性腰痛症や変形性腰椎症などは現在,疾患概念,診断 基準などに多尐不明確な部分があり,診断には注意を要する.また,運動麻痺を伴う腰 痛は緊急度の高い腰痛と分類(4)でき,腰椎椎間板ヘルニアがこれにあたる. 腰痛の原因には脊柱構造の異常から内臓疾患が起因と様々だが,ほとんどの場合脊柱 構造の異常である.また,手術を要し腰痛を治療できるのは僅かであり,ほとんどの症 状は保存治療や姿勢の改善により痛みを取り除くことができる.このことから姿勢と腰 痛には大きな関係があると考えられる. 2.2 従来の姿勢変化の計測方法 現在行われている画像による診断方法,また姿勢変化による椎間板への負荷を直接計 測する方法を示す. X 線撮影(レントゲン撮影)(2) X 線撮影では,X 線照射装置とフィルムの間に体を置き,焼き付けて画像化する.X 線 撮影には種々な特殊撮影があるが,単純 X 線撮影が画像診断の基本であり,最も重要で ある.骨組織を扱う整形外科では最も基本的な検査であり,骨の形態や椎体骨梁の微細 な変化や骨密度などの観察に適している. CT(コンピュータ断層撮影)(2) 人体組織のX 線吸収に差があることを利用して細かい X 線をビーム状に体軸に水平に 照射し,高感度の検出器で検出して X 線吸収係数をコンピュータで画像に再構築したも のである.特に横断面での広がりを見るのに適する.5 MRI(核磁気共鳴画像法)(2) 脊椎,脊髄疾患の診断に関しては,単純 X 線撮影に次ぐ検査として有用である.原理 としては,核磁気共鳴現象を利用して生体内の内部情報を画像化する方法である.断層 画像という点ではX 線,CT と一見よく似た画像が得られるが,CT とは全く異なる物質 の物理的性質に着目した撮影法であるゆえに,CT で得られない情報が多く得られる.CT では主に骨に関する情報を得られるのに対し,MRI では,神経,椎間板,骨髄の情報を 低侵襲で得ることができる,近年3D-MRI(MRI ミエログラフィー)によって神経根の 連続した描出も可能になっている.腰椎椎間板ヘルニア,脊柱管狭窄症,脊椎,脊髄腫 瘍や炎症性疾患のスクリーニングとして優れている. 現在,これらの方法が多くの腰痛診断で利用されており,体の内部情報を得るには非 常に適している.しかし,X 線撮影では放射線を浴びるため,人体への影響から実験には 制約があり,姿勢変化を計測するには適していない.また,CT や MRI は基本静止した 状態での計測となるため,限られた姿勢での計測しか行えないという欠点が挙げられる. 椎間板内圧計測法 世界的に有名なスウェーデンの整形外科医である Nachemson らが行った研究で第 3 腰椎と第 4 腰椎の間の椎間板に直接電極針を挿入して内圧を計測した方法がある.椎間 板内圧の計測結果を図2.1 に示す.この方法であれば,直接椎間板に加わる圧力を測定す るため高い精度が得られるため信頼性が高く,姿勢が変化していても測定可能である. しかし,外科手術を要する侵襲的な計測であるため,限られた研究機関でしか行えない. 身体を傷つける危険性があり,動作中の計測は危険を伴うため一般的ではない. 図2.1 椎間板内圧の計測結果(2)
6
第3章 提案する推定法の概要
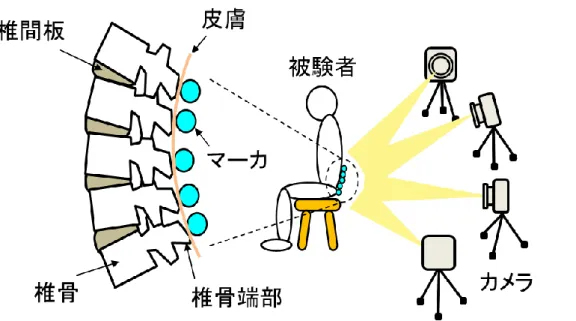
本研究ではより安全で動作中の計測も可能である 3 次元動作解析装置を用いる.図 3.1 に 3 次元動作解析装置を示す.この装置は動作を計測したい対象にマーカを貼り付け,複 数台のカメラで撮影することにより,3 次元座標を取得することができる装置である. 本研究では緊急性の高い腰痛であり,疾患頻度が高く,発症メカニズムも明瞭である腰 椎椎間板ヘルニアを研究対象とする.腰椎部の椎骨端部が背中の体表面に近い部分に存在 していることに着目する.図3.2 に示すように腰椎部の椎骨端部に対応する位置にマーカを 貼り付け,複数台のカメラによりマーカを撮影する.撮影された画像データを信号処理し, それぞれのマーカの 3 次元座標を計算する.それを信号処理することにより腰椎部の姿勢 変化を計測する. 3 次元動作解析装置を用いる場合には被験者の動作による皮膚の微妙な動きがマーカに 影響を及ぼすため,腰椎部の全体的な姿勢変化から椎骨間の平均的な隙間変化を推定する ことを考える.3 次元動作解析装置により得られた各マーカの座標から腰椎部全体としての 姿勢変化を最小 2 乗法を用いて円にフィットさせ,その曲率半径から腰椎部全体の平均的 な隙間変化を推定し,椎間板負荷を評価する. 図3.1 3 次元動作解析装置7
8
第4章 3 次元動作解析装置による計測の精度検証
4.1 精度検証の実験内容 本研究において椎間板にかかる負荷を精度よく推定するには,3 次元動作解析装置によ り腰椎部の形状を精度良く推定できることが重要となる.そこで,曲率半径が既知の計 測モデルを図4.1 に示すように配置し,3 次元動作解析装置を用いて精度検証を行う.図 4.2 に示す計測モデルは曲率半径が 200mm,400mm,600mm,800mm,1000mmに カットした木材であり,これを用いた検証となる.曲率半径の算出方法としては円の最 小2 乗法(第 5 章)を用いる. 図4.1 精度検証における実験概要図 曲率半径200mm 曲率半径 400mm9
曲率半径600mm 曲率半径 800mm
曲率半径10000mm
10 直径の異なるマーカでの精度検証 図4.2 に示した計測モデルを用いて,3 次元動作解析装置で測定する.実際の木材の曲 率半径と最小2 乗法により算出した曲率半径を比較する.腰椎部の湾曲の円弧と同等の 長さである170mmになるよう等間隔にマーカを 5 個貼り付ける.その様子を図 4.3 に示 す. また,直径の異なるマーカを使用することにより算出した曲率半径に違いがあるか検 証する.図4.4 に検証に使用したマーカを示す.左から直径 4mm,6mm,10mmのマ ーカである. 図4.3 円弧長さが 170mm のマーカ貼り付け位置 図4.4 検証に使用したマーカ
11 カメラ配置による精度検証 測定に用いるカメラの配置の違いにより算出する曲率半径に影響があるかを検証する. 図 4.5 に示すような対象物に対してカメラの高さを 4 台とも一定にした 2 次元的に撮影 する場合(条件1 とする).図 4.6 に示すように対象物に対して高さが異なるカメラを配 置した3 次元的に撮影した場合(条件 2 とする)を比較する.円弧の長さは 170mm に なるようにマーカを5 個貼り付ける. 図4.5 2 次元的に撮影する場合のカメラ配置(条件 1) 図4.6 3 次元的に撮影する場合のカメラ配置(条件 2)
12 4.2 精度検証の実験結果 表4.1 に最小 2 乗法により算出した曲率半径をマーカの直径別に示し,図 4.7 に一致率 を示す.なお,一致率は正確値に対する算出値の比をパーセンテージで表すこととする. 表4.1 直径の異なるマーカを使用した場合の曲率半径算出結果 木材の曲率半径 曲率半径 (マーカ直径4mm) 曲率半径 (マーカ直径6mm) 曲率半径 (マーカ直径10mm) 200 196 202 208 400 387 426 407 600 533 580 567 800 650 662 750 1000 701 834 877 [mm] 図4.7 直径の異なるマーカを使用した場合の一致率 0 20 40 60 80 100 120 0 200 400 600 800 1000 1200 一致率 [%] 木材の曲率半径[mm] 4mm 6mm 10mm マーカ直径
13 表 4.2 に計測に用いるカメラの配置を変更した場合での算出した各曲率半径を示し,図 4.8 に一致率を示す. 表4.2 カメラ配置の条件を変えた場合の曲率半径算出結果 木材の曲率半径 曲率半径(条件1) 曲率半径(条件2) 200 196 200 400 408 438 600 511 521 800 701 722 1000 701 713 [mm] 図4.8 カメラ配置の条件を変えた場合の一致率
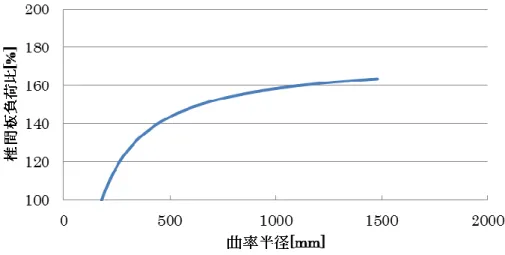
14 曲率半径が大きくなるにつれて実際の曲率半径と算出した曲率半径との誤差が大きく なる.これは図4.9 に示すように曲率半径が大きくなるということは,円周の長さに対す る測定した円弧長さの比が減尐するため,マーカの位置座標を読み取る精度が大きく影 響したと考える. マーカの直径の違いによる一致率を比較すると,直径が小さくなるにつれて一致率は 下がる傾向がある.これはキャプチャー領域に対してマーカが小さくなると,位置座標 を読み取りにくくなることが原因であると考えられる.しかし,撮影時におけるマーカ の干渉,椎骨端部への貼り付けなどを考えると4mm または 6mm が理想的である.精度 検証の両マーカの結果より,本研究では木材の曲率半径との一致率が高い6mm のマーカ を使用することとする. カメラ配置の条件を変更したことによる精度の大きな向上は見ることができなかった. マーカを立体的に撮影するという観点から高さが異なるカメラを配置した条件 2 の場合 が若干ながら精度が良い.この結果から条件2 のカメラ配置でこれ以降の実験を行う. 椎間板負荷の推定手順については第 5 章で詳しく述べるが,本手法を用いたことによ る曲率半径と椎間板負荷の関係を図4.10 に示す.椎間板負荷は曲率半径が大きくなるに つれて,一定に近づく.この図より曲率半径が大きい場合には実際の腰椎部の曲率半径 と誤差が生じても,椎間板負荷の推定には影響が尐ないと考えられる. 各精度実験の結果から決定した条件で,3 次元動作解析装置を用いて腰椎部の曲率半径 を推定し,第6 章で述べる椎間板負荷の推定実験を行うこととする. 図4.9 曲率半径別の円周に対する円弧長さ
15
16
第5章 提案する椎間板負荷の推定法
5.1 腰椎部の曲率半径の推定 姿勢変化を計測するために腰椎部の曲率半径を推定する.3 次元動作解析装置により得 られた5 個のマーカの位置座標データから最小 2 乗法を用いて円にフィットさせる.円 の最小2 乗法(5)の手順を以下に示す. 円の一般式は中心座標を
a,
b
,半径をr
とすると
2
2 2r
b
y
a
x
(5.1) 式(5.1)を= 0の式に変形し,点の座標
x
i,
y
i
を代入し,その式の2 乗の総和を求める.
x
i
a
2
y
i
b
2
r
2 2
0
(5.2) このまま未知数𝑎,𝑏,𝑟に関して式(5.2)を偏微分しても𝑎,𝑏,𝑟は 4 次関数となるので, 未知数の偏微分= 0の時が最小とは限らない.そこで,式(5.2)を展開し,次式のように置 く.
x
i2
y
i2
Ax
i
By
i
C
2
0
(5.3) ただし,
a
A
2
(5.4)
b
B
2
(5.5) 2 2 2
r
b
a
C
(5.6) 式(5.3)に関しては𝐴,𝐵,𝐶について偏微分すると
0
2 3 2 i i i i i i iB
x
y
C
x
x
x
y
x
A
A
(5.7)
0
3 2 2 i i i i i i iy
B
y
C
y
x
y
y
x
A
B
(5.8)
0
1
i2 i2 i iB
y
C
x
y
x
A
C
(5.9) 式(5.7)(5.8)(5.9)を解くことにより𝐴,𝐵,𝐶が求まり,式(5.4) (5.5) (5.6)より円の中心座標
a,
b
,円の半径r
を求めることができる.17 5.2 椎骨間の隙間の推定 腰椎部の曲率半径を推定後,椎骨間の隙間を推定する.図5.1 に腰椎部の概要を示す. 椎骨は力学的にはピンジョイントと等価な形で結合されていると考える.2 次元的な姿勢 変化ではピンジョイント部分の回転と椎骨関節での弾性変形により決まると考える.本 研究では椎間関節での弾性変形は微小な変形であるため,無視する.ここでは,図のよ うに円弧が外側に凹の場合での椎間板負荷の推定法について説明する. 図5.1 椎骨間の隙間の推定 図5.1 でマーカの中心からジョイント部の位置までの距離
d
,ジョイント部の位置から 椎間板の中心位置までの距離をe
,円の最小2 乗法で推定した腰椎部の曲率半径をr
とす る.d
,e
はどの椎骨においても一定とする.ジョイント部の位置での椎骨の幅をv
とす る.本研究では,椎間関節の弾性変形を無視しているので一定とする.椎間板の位置で の椎骨の幅をw
とする. このような仮定をおき,ジョイント部までの長さr
vをr
v
r
d
(5.10) と定義すれば,r
vおよびv
を用いて1 個の椎骨に対応する角度
vが18
v vr
v
2
sin
2
1
(5.11) より得られる.この式は曲率半径が小さくなれば,角度
vが大きくなり,椎間板の位置 での隙間が広がること,すなわち圧縮力が小さくなることを意味している.逆に曲率半 径が大きくなれば,角度
vが小さくなり,椎間板の位置での隙間が小さくなること,す なわち圧縮力が大きくなることを意味している. 次に椎間板位置までの長さr
wをr
w
r
d
e
(5.12) と定義すれば,r
wおよびw
を用いて椎間板位置での椎骨の幅に対応する角度
wが
w wr
w
2
sin
2
(5.13) より得られる.2 つの角度の差より椎間板位置に対応する角度
を
v
w (5.14) により計算し,椎間板位置の半径であるr
wを乗じて
r
w
(5.15) を計算すれば,椎骨間の隙間の円弧長さを表現することができる. また,円弧が外側に凸の場合は円弧の中心が腰椎よりも前方になることからd
,e
の符 号が反対になる.したがって,円弧が外側に凹の場合に展開した推定手順に関する式に おいて,d
を
d
,e
を
e
に置き換え,外側に凹の推定手順を用いれば椎間板負荷を評 価できる.19 5.3 椎間板負荷の推定 椎骨間の隙間を推定後,椎間板負荷の推定を行う.椎間板に負荷がかかっていない状 態での曲率半径を
r
0とすればそれに対応する
0が得られ,無負荷状態から計測した状態 への椎間板位置での隙間変化
は
0 (5.16) となる.最も簡単な場合として,椎間板の負荷が隙間変化に線形のばね定数を乗じたも ので表現できるのであれば,
に対応する等価なばね定数をk
と置けば,負荷p
はp
k
(5.17) で表現できる.ここで,立位姿勢の場合に添え字s
をつけて表現すれば,p
s
k
s (5.18) となる.p
をp
sで正規化すれば,無次元の負荷
が s sk
k
(5.19) で表現される.したがって,かなりの仮定があるが正規化した負荷であれば,ばね定数 の大きさに影響を受けないので,隙間に関する情報のみで椎間板負荷を推定することが 可能となる.20
第6章 椎間板負荷の推定実験
6.1 椎間板負荷の推定実験内容 今回は 2 次元的な姿勢変化で重量物を持たない場合を対象とした測定を行う.被験者 の腰椎部の椎骨端部に対応する位置にマーカを貼り付け,4 台のカメラを用いて測定する. また,この実験におけるサンプリング周波数は100Hz である.静止した姿勢,動作中の 姿勢において測定を行い,椎間板負荷を推定する.図6.1 に実験風景を,図 6.2 に実験時 のマーカの貼り付け位置を示す. 実験には3 人の被験者を用いる.3 人の被験者には実験内容を説明し,同意を得た上で 協力して頂いた.表6.1 に各被験者の身体情報を示す. 図6.1 実験風景 図6.2 マーカの貼り付け位置21 表6.1 被験者の身体データ 性別 身長(cm) 体重(kg) BMI 体脂肪率(%) 備考 被験者1 男 168 58.6 20.7 20.4 腰痛あり 被験者2 男 167 73.3 26.3 27 腰痛なし 被験者3 男 181 73.2 22.4 15.7 腰痛なし 実験時に使用する装置 本研究での椎間板負荷の推定実験において,上体の前屈角度により測定する姿勢を決 定する.そのため,上体を前傾した時の前屈角度を測る必要がある.これまでは医療用 の角度計とデジタル角度計を併用することで上体の前屈角度を測ってきた.しかし,こ れでは動作中の測定時に前屈角度を測ることができない.そこで今回の椎間板負荷の推 定実験では図6.3 に示す Xsens 社製の姿勢センサ MTx を用いてリアルタイムに前屈角度 を測定する.姿勢センサでの測定と 3 次元動作解析装置の撮影を同期させ,以降に述べ る姿勢時の実験を行う. 図6.3 姿勢センサ
22 静止時の測定 重量物を持たない静止時の姿勢の測定を行う.Nachemson が実験で行った測定姿勢の 内,図6.4 に示す 4 つ姿勢の測定を行う.各姿勢において静止状態(1 秒間)の姿勢を測 定する. 図6.4 静止時の測定の測定姿勢 動作中の測定 動作中の測定では,低速動作と高速動作の測定を行う. 低速動作は楽に立った姿勢から前屈を行う動作を測定する.計測開始から 2 秒間は静 止する.2 秒経過後から前屈動作を行う.撮影時間は 7 秒間とする 0 秒 2 秒 7 秒 図6.5 立位姿勢からの前屈動作
23
高速動作では咳を行った動作の測定する.立位姿勢をとり,測定開始 4 秒後に 2 回,7 秒後に1 回咳を行う.撮影時間は 10 秒間とする.
0 秒 4 秒 7 秒 10 秒 図6.6 立位姿勢からの咳動作
24 6.2 椎間板負荷の推定結果 静止時の測定での椎間板負荷の推定結果 椎間板負荷の推定に用いる腰椎部の曲率半径は 1 秒間の平均値を用いる.指標とする Nachemson と同様に楽に立った姿勢で正規化を行い,椎間板負荷を評価する.各被験者 の椎間板の物性値を調査するのは困難であるため,比較対象であるNachemson の実験結 果のスケールに合わせるように決定した.そのため,今回は無負荷状態の隙間部分の円 弧長さ
0は各被験者に対して仮定の値を用いる.そして,椎間板負荷の推定結果と Nachemson の実験結果と比較する. 表6.2 に各被験者の腰椎部の曲率半径を推定した結果を示す. 表6.2 各被験者の腰椎部の曲率半径 測定姿勢 被験者1 被験者2 被験者3 ① 140 100 186 ② 311 161 359 ③ 256 135 308 ④ 733 307 529 [mm] 表6.3 に各被験者に使用した無負荷状態での隙間部分の円弧長さ
0の仮定値を示す. 表6.3 各被験者の無負荷状態での仮定値 無負荷状態での 隙間部分の円弧長さ
0 被験者1 15.9 被験者2 17.8 被験者3 13.0 [mm] 図6.6 から図 6.8 に各被験者の椎間板負荷の推定結果を示す.Nachemson の実験結果 と同様に楽に立った姿勢を基準姿勢(100)とし,各姿勢の椎間板負荷を示す.25
図6.6 静止時の椎間板負荷比(被験者 1)
26 図6.8 静止時の椎間板負荷比(被験者 3) 図 6.9 に Nachemson の実験結果と本手法による実験結果を比較したものを示す.左 端にNachemson の実験結果,右の 3 つが本手法による被験者の椎間板負荷の推定結果で ある. 図6.9 Nachemson の実験結果と本手法による実験結果の比較
27 表6.4 に Nachemson の実験結果と本手法による椎間板負荷の推定結果の詳細な数値を 示す. 表6.4 Nachemosn の実験結果と本手法による椎間板負荷の推定結果の数値 計測姿勢 Nachemson 被験者1 被験者2 被験者3 ① 100 100 100 100 ② 150 155 145 162 ③ 140 145 130 150 ④ 185 186 186 185 [%] 比較対象である Nachemosn の実験結果と本手法による椎間板負荷の推定結果を比較 したところ,全ての被験者において同様の傾向が得られた.椎間板負荷の詳細な数値で 見ると多尐の誤差があるが,Nachemson が用いた被験者で測定を行っているわけではな いため,厳密な精度に関する比較は難しい.しかし,各姿勢の傾向が見られたことから, かなり一致した結果が得られたと考える.測定した 4 つの姿勢での椎間板負荷の推定実 験は継続して行われてきており,Nachemson の実験結果と同様の傾向は以前からも得ら れている.そこで,Nachemson の被験者の数値で精度の比較は難しいが,今回協力して 頂いた各被験者の椎間板負荷の推定結果を比較対象とすれば,精度に関する議論が可能 だと考える.次に述べる動作中の測定では表6.4 に示した各被験者の推定結果を比較対象 とし,同角度での椎間板負荷を見る.
28 動作中の測定での推定結果 前屈動作では撮影開始から静止していた 0 秒から 2 秒時の平均的な姿勢を基準姿勢 (100)として,姿勢変化による椎間板負荷を評価する.図 6.10,図 6.11 に楽に立った 姿勢から前屈動作を行った被験者1,被験者 3 の椎間板負荷の推定結果を示す.この結果 は上体の前屈角度に対する椎間板負荷の推定結果である.また,表6.4 に示した推定結果 と比較するために推定した椎間板負荷を近似曲線で示している. 図6.10 前屈動作における椎間板負荷の推定結果(被験者 1) 図6.11 前屈動作における椎間板負荷の推定結果(被験者 3)
29 表6.5 に 2 人の被験者の前屈角度が 20°時の静止時と動作時の負荷推定結果の数値を 示す. 表6.5 前屈角度 20°における静止時と動作時の負荷推定結果 静止時の 負荷推定結果 動作時の 負荷推定結果 被験者1 155 154 被験者3 161 159 2 人の被験者から椎間板負荷の変化を見ることができた.推定結果は両者とも前屈角度 が増加していくと椎間板負荷も増加する.静止時の実験結果からも明らかであり,その 傾向が得られた.前屈角度が 20°の場合での推定した椎間板負荷は静止時の実験,前屈 動作の実験ともにかなり一致した数値を得ることができた.前屈動作は比較対象がなく, 精度に関する比較は行えなかったが,姿勢センサを用いたこの実験方法ならば同被験者 で精度の比較は可能と考えられる. また, 0°から 30°まで 2 人の被験者ともに椎間板負荷は線形が保たれている.この ことから前屈動作の推定精度が明確になれば,前屈角度が 20°以外の姿勢にも新しい指 標ができると考えられる.
30 咳動作では撮影開始時の姿勢を基準姿勢(100)として,姿勢変化による椎間板負荷を 評価する.図6.12 から図 6.14 に楽に立った姿勢から咳動作を行った被験者 3 人の椎間板 負荷の推定結果を示す. 図6.12 咳動作における椎間板負荷の推定結果(被験者 1) 図6.13 咳動作における椎間板負荷の推定結果(被験者 2)
31 図6.14 咳動作における椎間板負荷の推定結果(被験者 3) 咳動作測定では全ての被験者から咳を行ったと同時に椎間板負荷の変化を見られた. 咳を行うことで腰痛を患う例は多数報告されており,症状の悪化の原因でもあるとい われている.このことから咳を行うことで椎間板に加わる負荷は増加すると考えられ る.今回の推定結果においてその傾向を得ることができた.精度に関する議論はこれ からの課題であるが,咳のような高速な連続動作でも本手法は椎間板負荷を推定する のに対応可能である見通しを得られた.
32
第7章 結言
本研究では,身体に負担をかけず比較的容易に椎間板負荷を測定する方法として 3 次元 動作解析装置を用いた非侵襲的な推定方法を提案した.本手法は腰椎部の椎骨端部が背中 の体表面に近い部分に着目し,椎骨の動きを 3 次元動作解析装置を用いて外部から測定す る.その動きから椎骨間の隙間変化を推定し,椎間板負荷として評価をした. 静止時の測定においては本手法による推定結果と侵襲的な測定である Nachemson の実 験結果を比較し,傾向としてはかなり一致した結果を得られた.動作中の測定では前屈動 作,咳動作の椎間板負荷の推定をし,動作による負荷の変化を見ることができた.前屈動 作での推定結果は前屈角度が増加するにつれて椎間板負荷も増加することが確認できた. また,各被験者の静止時の推定結果を新たな指標とし,精度を評価したところかなり一致 した値が得られた.咳動作では咳を行うと椎間板負荷が増加する傾向が推定結果から得る ことができ,高速な動作でも対応可能であることが確認できた.今回の実験結果により, 本手法が椎間板負荷を推定するにあたり有効であることがわかった. 今後は,ここで示した測定姿勢についても検討を行う必要があるが,姿勢が複雑になれ ばなるほど比較対象がないため,様々な姿勢での椎間板負荷を推定しても評価が難しいの が現状である.単純な姿勢や動作であるが,被験者を増やしデータを蓄積することで新た な指標を生み出し,本手法の有用性をより確かなものにしていく必要があると考える.33
謝辞
本研究を進めるにあたり,井上喜雄教授ならびに芝田京子准教授に多大なご指導賜り, 心から感謝の意を表したいと思います.
34
参考文献
(1)LUMBAR DISC PRESSURE AND MYOELECTRIC BACK MUSCLE ACTIVITY DURING SITTIHG:
I .Studies on an Experimental Chair
B.J.G.Andersson, R.Örtengren, A.Nachemson, and G.Elfström,1974,pp104-114. (2)最新 腰痛症ハンドブック 腰椎椎間板ヘルニアからスポーツ,事故の治療まで: 遠藤 健司,金岡 恒治,2008,pp7-81. (3)整形外科:痛みへのアプローチ 腰背部の痛み: 寺山 和男,片山 治,山本 博司,2006,pp102-121 (4)腰痛 知る診る治す: 清水 克時,2008,pp26-58 (5) 一般式による最小二乗法(円の最小二乗法)画像ソリューション(参照日:2010.9.8) http://imagingsolution.blog107.fc2.com/blog-entry-16.html