博 士 論 文
変圧器鉄心の騒音への影響因子に関する研究
平成
27 年 3 月
溝
上 雅 人
岡山大学大学院
自然科学研究科
目次
第1章 序論 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 1 1.1 本研究の背景 ・・・・・・・・・・・・・・・・・・・・・・・ 1 1.2 本研究の目的と意義 ・・・・・・・・・・・・・・・・・・・・ 2 1.3 論文の構成 ・・・・・・・・・・・・・・・・・・・・・・・・ 4 参考文献 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 6 第2章 鉄心の騒音・振動とその関連特性の測定・評価方法 ・・・・・・・ 8 2.1 緒言 ・・・・・・・・・・・・・・・・・・・・・・・・・・・ 8 2.2 モデル鉄心に関する実験方法・装置と騒音レベル計算法 ・・・・・ 9 2.3 モデル鉄心の仕様と設置方法の決定 ・・・・・・・・・・・・・ 11 2.4 騒音測定位置に関する検討 ・・・・・・・・・・・・・・・・・ 16 2.4.1 鉄心騒音測定における検討課題 ・・・・・・・・・・・・ 16 2.4.2 測定位置間の騒音差 ・・・・・・・・・・・・・・・・・ 17 2.4.3 平均値の誤差を考慮した測定位置数の検討 ・・・・・・・ 19 2.4.4 測定距離の増加による誤差の低減 ・・・・・・・・・・・ 24 2.4.5 測定位置に関する検討のまとめ ・・・・・・・・・・・・ 31 2.5 モデル鉄心による評価の有効性 ・・・・・・・・・・・・・・・ 33 2.6 振動測定システムの開発 ・・・・・・・・・・・・・・・・・・ 34 2.7 磁歪測定法 ・・・・・・・・・・・・・・・・・・・・・・・・ 36 2.8 振動の騒音レベルへの換算方法 ・・・・・・・・・・・・・・・ 37 2.9 結言 ・・・・・・・・・・・・・・・・・・・・・・・・・・・ 39 参考文献 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 40 第3章 圧縮応力による電磁鋼板の磁歪変化と鉄心の騒音変化 ・・・・・・ 43 3.1 緒言 ・・・・・・・・・・・・・・・・・・・・・・・・・・・ 43 ⅰ3.2 実験方法 ・・・・・・・・・・・・・・・・・・・・・・・・・ 43 3.2.1 磁歪評価方法 ・・・・・・・・・・・・・・・・・・・・ 43 3.2.2 モデル鉄心の構造と実験手順 ・・・・・・・・・・・・・ 44 3.2.3 騒音測定法と測定環境の検討 ・・・・・・・・・・・・・ 46 3.3 実験結果と考察 ・・・・・・・・・・・・・・・・・・・・・・ 47 3.3.1 圧延方向への圧縮応力による磁歪変化 ・・・・・・・・・ 47 3.3.2 鉄心への圧縮応力による騒音変化 ・・・・・・・・・・・ 49 3.3.3 圧縮応力による変化の観点での磁歪と騒音の関係 ・・・・ 52 3.3.4 鉄心変形の騒音への影響 ・・・・・・・・・・・・・・・ 56 3.4 結言 ・・・・・・・・・・・・・・・・・・・・・・・・・・・ 60 参考文献 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 60 第4章 鉄心締め付け圧力の変更による共振振動の発生と騒音への影響 ・・ 63 4.1 緒言 ・・・・・・・・・・・・・・・・・・・・・・・・・・・ 63 4.2 実験手法 ・・・・・・・・・・・・・・・・・・・・・・・・・ 63 4.2.1 モデル鉄心の仕様と構造 ・・・・・・・・・・・・・・・ 63 4.2.2 振動・騒音の測定手法と実験条件 ・・・・・・・・・・・ 65 4.3 実験結果と考察 ・・・・・・・・・・・・・・・・・・・・・・ 65 4.3.1 締め付け圧力の変更による振動の変化 ・・・・・・・・・ 65 4.3.2 共振による振動増加の騒音への影響 ・・・・・・・・・・ 72 4.3.3 振動の騒音への換算法の検討 ・・・・・・・・・・・・・ 74 4.4 結言 ・・・・・・・・・・・・・・・・・・・・・・・・・・・ 77 参考文献 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 78 第5章 鉄心接合部の構造変更による騒音と磁歪の変化 ・・・・・・・・・ 79 5.1 緒言 ・・・・・・・・・・・・・・・・・・・・・・・・・・・ 79 5.2 実験方法 ・・・・・・・・・・・・・・・・・・・・・・・・・ 79 ⅱ
5.2.1 モデル鉄心の仕様と構造 ・・・・・・・・・・・・・・・ 79 5.2.2 騒音測定 ・・・・・・・・・・・・・・・・・・・・・・ 80 5.2.3 ひずみゲージによる鉄心の磁歪測定法 ・・・・・・・・・ 81 5.3 騒音に対する接合部構造の影響 ・・・・・・・・・・・・・・・ 84 5.3.1 測定結果 ・・・・・・・・・・・・・・・・・・・・・・ 84 5.3.2 考察 ・・・・・・・・・・・・・・・・・・・・・・・・ 85 5.4 鉄心磁歪に対する接合部構造の影響 ・・・・・・・・・・・・・ 88 5.4.1 磁歪の評価方法と測定結果 ・・・・・・・・・・・・・・ 88 5.4.2 磁歪と騒音の相関性に関する検討 ・・・・・・・・・・・ 91 5.5 結言 ・・・・・・・・・・・・・・・・・・・・・・・・・・・ 94 参考文献 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 94 第6章 鉄心接合部の構造異常による騒音増加 ・・・・・・・・・・・・・ 96 6.1 緒言 ・・・・・・・・・・・・・・・・・・・・・・・・・・・ 96 6.2 モデル鉄心の特異な騒音特性挙動 ・・・・・・・・・・・・・・ 96 6.2.1 実験方法 ・・・・・・・・・・・・・・・・・・・・・・ 96 6.2.2 騒音測定結果 ・・・・・・・・・・・・・・・・・・・・ 97 6.2.3 特異挙動の原因に関する検討 ・・・・・・・・・・・・・ 98 6.3 異常接合による騒音増加の実測と検討 ・・・・・・・・・・・・ 102 6.3.1 鉄心の接合状態を変更可能とする実験方法 ・・・・・・・ 102 6.3.2 異常接合状態での騒音測定結果 ・・・・・・・・・・・・ 104 6.3.3 音圧波形の実測結果と検討 ・・・・・・・・・・・・・・ 105 6.4 結言 ・・・・・・・・・・・・・・・・・・・・・・・・・・・ 108 参考文献 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 109 第7章 結論 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 111 ⅲ
謝辞 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 116
- 1 - 第1章 序論 1.1 本研究の背景 変圧器は大規模集中型発電が主流である現在の電力システムが継続する 限り,効率的な送配電を行うために必須の電磁機器である。この変圧器に対 して要求される性能には多様な項目があるが,その一つとして低損失性[1.1] があげられる。現状よりも更に効率的なエネルギー伝送を実現するため,変 圧器の低損失化を目的とした技術開発が続けられている。しかし場合によっ ては,変圧器がその周囲に拡散させる騒音がより一層重視される。この騒音 は変圧器の運転中に常に発生し,人にとっては不快なものであるため,変電 所の周辺住民の住環境を劣化させる。 騒音の問題化には以下の具体的ケースが考えられる。送配電効率を追求す ると変電所の設置場所はできるだけ電力消費地域に近い方が望ましいが,そ れが住宅地に近い場合には騒音が問題化する。また,既存変電所でも都市化 によって付近まで住宅地が拡大してくる場合があり,それまで稼働していた 変圧器でも新たに騒音が問題となる可能性がある。あるいは既存変電所の変 圧器更新時に負荷の増加に対応するために変圧器の容量増加を行う場合,一 般的に高容量ほど騒音が増加するため,新たに騒音が問題化する場合もある。 この騒音問題に対処するために法的規制が設けられており,住宅地域や工 業専用地域などの地域の種別ごとに騒音規制値が設定されている[1.2]。また, 電力会社独自の規制によって更に厳しい上限値が設定されている例[1.3]もあ る。この規制を満たすために,変圧器発注時の仕様として設置地域で問題と ならない騒音レベルが提示され,納入される変圧器がその条件を満たすこと が要求される。もしこの要求が満たせなかった場合は,変電所での防音壁の 設置など追加の騒音対策が必要となるばかりでなく,最悪の場合には現場で の稼働の可否が問われる可能性もある。このことから,変圧器の基本機能と は何ら関係のない騒音が,実は変圧器にとって極めて重要な問題であり,技
- 2 - 術課題であることが認識できる。 変圧器騒音に関する技術開発目標の一つは,当然のことながら騒音低減で ある。騒音規制は年を追うごとに厳しくなっており,実際に厳しい規制が課 せられる変圧器の台数が増加している。このため,現状レベルよりも低騒音 化が可能な技術開発が求められ続けている。その他の目標として,要求仕様 に基づいた設計騒音値を製品で精度良く実現できる技術の確立も挙げられ る。これは,例えば完成品の騒音レベルが要求値を不必要に大きく下回った 場合,騒音対策が過剰と見なされてコスト面で問題化する可能性が生じるた めである。要求レベルを考慮して適切な騒音対策を選択できる技術が低コス トでの製造のために必須である。以上の目標は,設計と製造の双方の技術力 向上で初めて実現できるもので,それら両者を検討の対象とする必要がある。 変圧器が発する騒音を大別すると励磁騒音と通電騒音に分けられる[1.1]。 励磁騒音は負荷の有無にかかわらず通電されると発生するもので,その原因 は鉄心材料である方向性電磁鋼板の磁歪現象[1.4]や鉄心内に設けられる接合 部での鋼板の振動現象[1.5]である。また,それらの振動を加振力とした鉄心 の機械的共振は励磁騒音を増加させる要因である[1.6]。一方,通電騒音は鉄 心の漏れ磁束中で巻線に負荷電流が流れることによって巻線に電磁力が働 き,振動が発生することが原因となる[1.7]。 1.2 本研究の目的と意義 本研究の目的は,変圧器の励磁騒音すなわち鉄心が発する騒音の低減と予 測が可能な技術の確立に向けて,騒音に影響を与える因子を定量的に評価す ると共に,振動の騒音への換算方法を検討することにある。また,その検討 を行うための実験方法を確立することも目的とする。 騒音影響因子として,まず磁歪を取り上げる。磁歪は電磁鋼板に外部から 応力を与えると変化することが古くから知られており[1.8],その磁歪変化に
- 3 - よる鉄心の騒音レベルの変化を実測によって示す。また,鉄心に機械的共振 が発生すると一般の構造体と同様に振動の振幅が増し,騒音増加に繋がる [1.9]。実験で鉄心の締め付け圧力を変更して行ったところ,特定の圧力で鉄 心振動が極大となる現象が見られた。これが共振現象と推定されたため,そ の詳細調査を行う。また,鉄心接合部はその構造にいくつかの種類があり, その変更が騒音に影響を与えることがわかっている[1.2]。そこで,構造の差 異による騒音の相違を明らかにする。更に接合部については鉄心の製造工程 で不正な構造となってしまうことがあり,その騒音への影響を明らかにする。 以上の検討によって,取り上げた各因子の変化による騒音の増減を定量的に 知ることができる。この知見は鉄心の低騒音化に役立つと共に,鉄心設計時 点で各因子の騒音への影響を考慮する際にも有効である。 次に,磁歪などの振動を騒音に換算する方法を検討する。この計算法は既 に提案されているが,それが実際にどの程度,騒音に一致するかはこれまで 検討されていない。そこで本研究ではその計算法を取り上げ,騒音の実測結 果と対応させることでその有用性を検証する。この検討によって磁歪を始め とする振動の騒音への換算法の精度を向上させることが可能となり,鉄心設 計時に目標とする騒音レベルを完成品で正確に実現できる技術の確立に繋 がっていく。 以上の諸検討は実験を主な手段としてなされたため,正しい結果の導出に は実験手法にも検討を加えて確立することが必須である。本研究では実機鉄 心を小型化したモデル鉄心を製作し,その騒音や振動の測定によって検討を 行う。そこでまず,モデル鉄心の設置方法を検討し,正確な結果を得るため の構造を決定する。また,騒音測定方法についても検討し,高精度の評価が 可能な具体的指標を導き出す。更に振動測定方法については,測定対象の広 範囲を効率的にかつ高精度で測定できるシステムを構築する。以上の検討は 本研究での評価の高精度化に役立つのみでなく,今後に同様の実験的検討を
- 4 - 行う際の指針として参照することができる。 1.3 論文の構成 第2 章では騒音,振動,磁歪に関する実験方法について検討すると共に, 磁歪などの振動を鉄心の騒音レベルに換算する方法を説明する。本研究では 鉄心に対する騒音や振動の実測を中心にして検討を行うが,まずそのために 使用するモデル鉄心の構造と支持方法,具体的には鉄心を横置きとするか竪 置きとするかについて評価精度の点から検討し,竪置きとする場合の支持構 造を決定する。また騒音測定方法について,その精度を確保するための検討 も行う。具体的には,鉄心周囲での騒音測定位置数の下限を実測による検討 で導き出すと共に,鉄心と測定位置の間の距離増加の精度向上効果とそのた めに生じる距離減衰も検討する。モデル鉄心に対しては振動測定も行うが, そのために鉄心上の多数の位置での測定を効率 良く高精度で行うためのレ ーザー振動計を使用する測定システムを開発した。その詳細についても説明 する。また,電磁鋼板の素材特性としての磁歪測定法についても説明する。 最後に,測定された磁歪や振動を単純にその変位の振幅で評価するのではな く,より騒音レベルに近い値に換算して評価する方法について述べる。 第 3 章では圧縮応力による磁歪と騒音の変化を検討する。電磁鋼板は応 力によって磁歪が変化し,特に圧延方向に圧縮力を加えた場合の磁歪増加が 主に調査されている。しかしその調査はこれまで単板サンプルで測定される 素材の磁歪特性について行われており,鉄心で同様の検討が行われた例はな かった。本研究でモデル鉄心に圧縮力を与える機構を開発し,圧縮力による 騒音変化を実測によって調査して騒音レベルへの影響を定量的に示す。更に その騒音変化を圧縮による素材磁歪の変化と対応させて検討し,磁歪を騒音 に換算する方法の検証を行う。この他に鉄心圧縮時に発生した鉄心変形が騒 音に与える影響についても検討する。
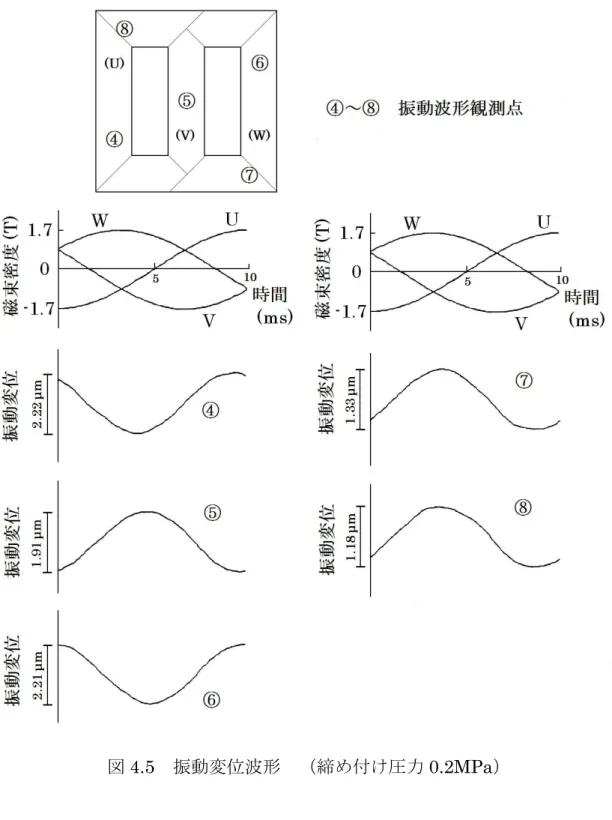
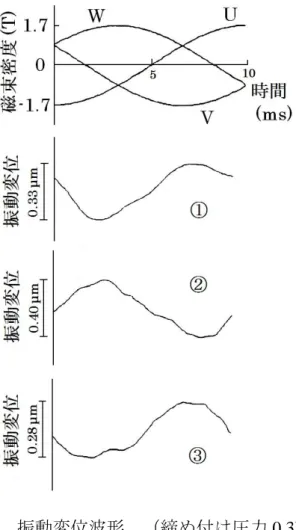
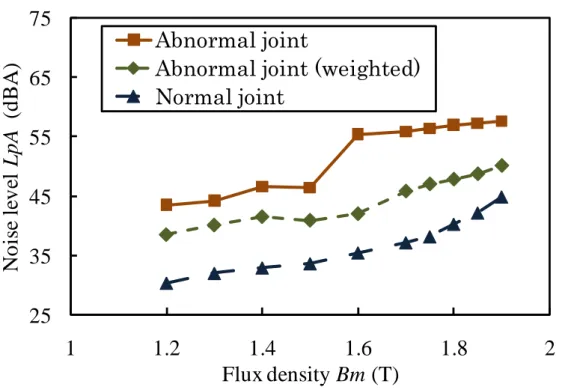
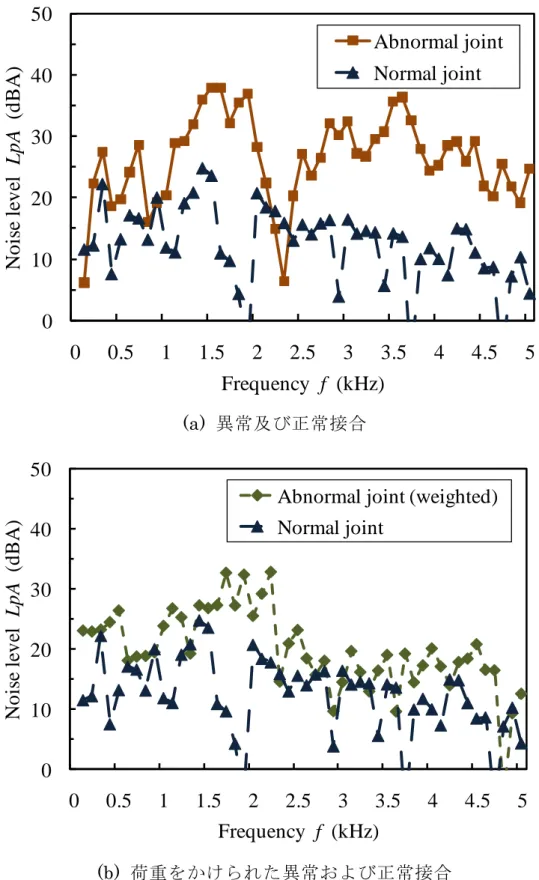
- 5 - 第 4 章では鉄心の締め付け圧力を変化させ,騒音と振動への影響を調査 する。積鉄心は形状を保って自立できる様に,締め付けによって外部から鋼 板に面圧を与えて鋼板間の摩擦力で強度を発生させている。締め付け力を変 更すると摩擦力の変化によって鉄心全体の剛性が変化するため,鉄心の固有 振動数が変化する。本研究でモデル鉄心の締め付け圧力を変更しながら鉄心 前面の振動測定を行ったところ,特定の締め付け圧力で振動変位が極大とな る現象が確認された。測定された振動分布から,変位が極大となる条件では 鉄心前面に特有の振動パターンが生じていることがわかった。また振動変位 波形から特定のモードで振動していることがわかり,共振振動が発生してい ると推定された。一方,騒音には共振の影響は明確に見られなかったため, 騒音の周波数分析を行ってその原因を明らかにする。更に鉄心の振動測定結 果に騒音への換算法を適用し,騒音の実測結果への対応を調査する。 第 5 章では鉄心の接合部構造を変更した時の騒音変化を検討する。積鉄 心では方向性電磁鋼板が良好な磁気特性を持つ圧延方向を鉄心の磁化方向 に一致させるために複数の接合部が設けられるが,そこでは鋼板の切断端部 の突合せ位置をずらしてラップさせながら組み合わせる構造が用いられる。 この組み合わせ構造として従来ラップとステップラップの 2 種類が用いら れており,ステップラップ接合の方が低騒音であることが知られている。そ の差をモデル鉄心による騒音測定によって定量的に示す。また,鉄心で発生 する磁歪をモデル鉄心にひずみゲージを設置することで測定し,接合方式の 変更によって生じる鉄心上の磁歪変化を測定する。この磁歪と素材磁歪に騒 音への換算法を適用し,実測騒音と比較することで換算法の問題点を明示す る。 第 6 章では鉄心接合部が発生する騒音について検討する。接合部は鋼板 の切断端部の突合せ位置をずらしてラップさせることで形成される。このラ ップによって鋼板同士の接触面積が大きくなり磁気抵抗が低下する 効果が
- 6 - あるが,一方で鋼板間の渡り磁束のために,交流励磁に従って変化する磁気 吸引力が鋼板の間に発生する。この力で鋼板が振動して騒音の原因となる。 多数のモデル鉄心を製作して騒音測定実験を繰り返す過程で異常な騒音特 性を示す鉄心が見つかったが,その原因は偶然発生した接合部の異常構造に よって磁気吸引力による振動が特に増したためと推定された。そこでこの異 常構造を,より簡易化したモデル鉄心で再現して発生する騒音を詳細に検討 する。 第7 章では第 2 章から第 6 章の検討から得られた成果をまとめる。 参考文献 [1.1] 「変圧器の環境適合性向上技術の現状とその動向」,電気学会技術報 告,第1023 号 (2005) [1.2] 「静止器の騒音対策技術の現状とその動向」,電気学会技術報告,第 616 号 (1996)
[1.3] R.S. Girgis, M.S. Bernesjö, S. Thomas, J. Anger, D. Chu, and H.R. Moore, “Development of ultra-low-noise transformer technology”, IEEE Trans. on Power Delivery, Vol.26, No.1, pp.228-234 (2011). [1.4] A.J. Moses, P.I. Anderson, T. Phophongviwat, and S. Tabrizi,
“Contribution of magnetostriction to transformer noise”, 45th International Universities’ Power Engineering Conference (UPEC), pp.1-5 (2010).
[1.5] A. Ilo, B. Weiser, T. Booth, and H. Pfützner, ”Influence of geometric parameters on the magnetic properties of model transformer cores”, Journal of Magnetism and Magnetic Materials, Vol.160, pp.38-40 (1996).
- 7 - S.12-4 (1999)
[1.7] E. Reiplinger, “Study of noise emitted by power transformers based on today’s viewpoint”, International Conference on Large High Voltage Electric Systems, 12-08 (1988).
[1.8] C.M. Brownsey and G.C. Maples, “Magnetostriction characteris- tics of 3.1% grain-oriented silicon-iron transformer steel”, Proceedings of IEE, Vol.113, No.11, pp.1859-1862 (1966).
[1.9] H. Fahnoe, “A study of sound levels of transformers”, AIEE Transactions, Vol.60, pp.277-283 (1941).
- 8 - 第2章 鉄心の騒音・振動とその関連特性の測定・評価方法 2.1 緒言 変圧器の騒音は古くから問題と見なされており,これまでに多様な検討が なされてきている。しかし実機を用いる検討では,規模が大きいことや高電 圧を扱う必要があること,製品として出荷する必要があることなどから適用 可能な試験項目が限られ,構造変更などの検討は容易ではない。そこで励磁 騒音の検討には,比較的小型で実験専用に製作されたモデル鉄心が多用され ており[2.1]~[2.8],本研究でもモデル鉄心を用いることで検討を行った。 本章では最初にモデル鉄心を使用する実験手法に関する検討について説 明する。モデル鉄心は簡略化のために実機とは異なる構造とする場合が多い が,そのために評価の正当性に問題が生じる可能性がある。この点について 騒音の実測によって検討を加えた。次に,騒音測定方法に対して詳細検討を 行う。実機ではその性能としての騒音レベルを決定するため,測定法に関す る詳細な規格[2.9][2.10]がある。しかし,騒音測定位置については実機の大き さが様々であるため,厳密には規定されていない。モデル鉄心でも規格に則 った方法を採るが,測定位置については評価の正確さの観点から検討を行っ て決定した。 励磁騒音は鉄心表面の振動が音波に変換されたものであるため,騒音現象 を深く理解するためには鉄心の振動状態についても知る必要がある。そこで 鉄心の振動を測定する手法が必要となるため,本研究でそのための振動測定 システム開発を行った。その概要についても本章で説明する。 励磁騒音の主原因は方向性電磁鋼板の磁歪現象である。この磁歪は電磁鋼 板の結晶組織の状態などによって変化するため,素材特性として評価する必 要がある。本章ではその測定方法についても説明する。 振動評価のための値としては一般的に変位振幅が用いられることが多く, 磁歪や鉄心振動でも使用されている。しかし騒音評価の観点に立つと,変位
- 9 - よりも更に望ましい評価方法がある。本研究では振動を騒音に換算する方法 を採用したので,その考え方と計算方法についても説明する。 2.2 モデル鉄心に関する実験方法・装置と騒音レベル計算法 本研究で騒音と振動の測定に用いるモデル鉄心の形式は騒音が問題とな る大型変圧器で多用される内鉄型 3 相 3 脚積鉄心とした。鉄心の励磁には 正弦波発振器の出力をパワーアンプで増幅して 1 次巻線に電力供給する方 法を用い,周波数と電圧を安定化させると共に波形精度を確保した。鉄心の 磁束密度は 2 次巻線の誘起電圧で設定する。これらの巻線にはビニル被覆 銅線を用い,各脚に 20 ターンずつ設置した。磁束密度の調整はコンピュー タで自動化されており,2 次電圧の誤差に基づいて発振器の出力電圧が調整 され,目的の磁束密度に設定される。3 相の結線方式は星型とした。 騒音測定には IEC651 規格に準拠した精密騒音計を用いる。騒音評価では 人の聴感特性を考慮する必要があるが,これは A 特性と言う名称で規格化 [2.11]されている。その曲線は図 2.1 で示すもので,騒音計にはそのためのフ 図2.1 聴感補正のための A 特性曲線 -80 -60 -40 -20 0 20 10 100 1000 10000 補正値 (d B ) 周波数 (Hz)
- 10 - ィルタが内蔵されている。変圧器の騒音測定は複数の位置で行うため,実験 では鉄心の周囲に複数のマイクロホンを設置し,その出力をコンピュータ制 御のマルチプレクサで切り替えながら精密騒音計に順に入力し,各測定位置 の騒音(音圧)レベルを求める。加えて,騒音計から出力される音圧波形を FFT アナライザーに入力し,騒音の周波数分析も行う。この周波数分析さ れた騒音レベルに対しても A 特性補正が適用される。収集されたこれらの データはコンピュータに転送されて解析される。 発音物体の騒音レベルを正確に知るには,物体を囲む閉曲面を十分な細か さで分割してその各領域で音を測定し,平均計算する必要がある。しかし変 圧器の騒音測定規格[2.9][2.10]では測定作業に要する時間も考慮した方法が規 定されている。すなわち比較的小型の変圧器では本体の 1/2 高さのみを測定 高とし,更にモデル鉄心が該当するタンクなし乾式変圧器では,本体から 0.3m 離れて本体を囲む線上で,間隔 1m 未満のほぼ等間隔とした 6 個以上 の位置で測定すれば良いと定められている。これら複数の位置で測定された 騒音レベルから全測定位置の平均値LpAを求めて評価に用いるが,そのため にはまず(2.1)式で求められるエネルギー平均 LpA0を算出する。 ・・・・・・・・・・ ここで,LpA0は暗騒音が補正されていないA 特性補正平均音圧レベル(dBA), N は測定位置数,n は測定位置番号,LpA0nは測定位置 n での A 特性補正音 圧レベル(dBA)である。 無励磁状態で測定される暗騒音と励磁騒音の差が過小の場合には LpA0に 誤差が含まれるため,その補正として次の方法が規定されている。暗騒音も 実測して平均値を(2.1)式で求め,(2.2)式で補正値を求める。
- 11 -
・・・・・・・・・・
ここで,LpAは暗騒音が補正された A 特性補正平均音圧レベル(dBA),LbgA
は暗騒音の A 特性補正音圧レベル(dBA)である。なお,LpA0とLbgAの差
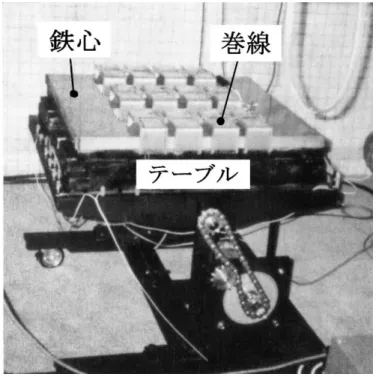
が 3dBA 未満の場合は(2.2)式を適用してもなお誤差の影響が無視できな いため,その測定結果は無効とする。 モデル鉄心は小型であるため発生する騒音レベルが低く,周囲の機器によ る暗騒音が特に問題となる。そのため騒音測定は遮音と除振対策が施された 暗騒音16~17dBA の無響室で行った。無響室には室内の壁面にグラスウー ルの吸音材が設置されているため,壁の反射による誤差も回避できる。 2.3 モデル鉄心の仕様と設置方法の決定 本研究で用いるモデル鉄心のサイズは以下の検討から決定した。発生する 騒音レベルは鉄心サイズと相関するため,サイズが過小だと発生する騒音が 検知可能レベル以下となってしまう可能性がある。一方,サイズを大きくす ると製作やハンドリングが難しくなる。これらを考慮し,実験に用いるモデ ル鉄心は図2.2 に示す様に,脚とヨークの幅を 150mm,外形の高さと幅を 共に 750mm とした。また,鉄心の積層厚は 41mm を基本とした。鉄心接 合部の構造は6 段ステップラップ,同時積枚数は 1 を基本とした。 ここでモデル鉄心の設置方法について,図 2.3 に示す a)横置きと b)竪 置きの2 法を比較検討した[2.12]。横置き法では,鉄心は固定されている巻線 に電磁鋼板を差し込んで積層することで製作され,そのままで測定できるの で実験準備が簡単である。竪置き法は実機の内鉄型積鉄心の設置状態により 近いが,自立させるための鉄心の締め付けと起立や巻線の設置作業が必要と なる。なお竪置き法では,鉄心の形状を保ち,起立状態での安定性を増すた
- 12 - め,鉄心の表面に木板を当てて締め付ける構造とした。 騒音測定は鉄心の 3 本の脚を取り囲む図 2.4 の 8 箇所で行い,その結果を 表 2.1 に示す。平均値は横置き法の方が 7.8dBA 高い。また,横置き法で, 鉄心上方に位置する測定点①~③の平均値は 50.2dBA であるのに対し,テ ーブル裏面側となる測定点⑤~⑦の平均値は 50.8dBA であった。テーブル で遮音されているはずの裏面のほうが高い音圧レベルとなるのは,鉄心振動 を加振力としたテーブルの共振振動が発生しているためと推測される。 図2.2 モデル鉄心のサイズ (単位 cm)
ヨーク
ヨーク
ヨーク
15
15
75
75
15
脚
脚
表 2.1 騒音測定結果 (各測定位置と平均,単位 dBA) ― 設置法 測 定 点 平均 ① ② ③ ④ ⑤ ⑥ ⑦ ⑧ 横置き法 48.0 51.9 49.8 43.7 48.7 52.2 50.8 43.2 49.5 竪置き法 39.5 43.2 42.6 40.9 41.6 41.4 40.6 42.6 41.7- 13 - a) 横置き法
b) 竪置き法
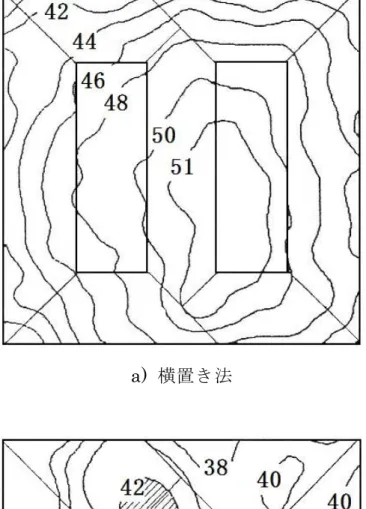
- 14 - 次に,騒音分布を鉄心の上面あるいは前面で音響インテンシティ法[2.13] によって測定した結果を図 2.5 に示す。横置き法では等高線図が同心楕円パ ターンを示しており,この原因もテーブル中心部が腹となる共振振動にある と推察される。テーブルは実験のために用いており実機鉄心には存在しない ため,その共振は鉄心の騒音評価にとっては誤差要因である。共振はテーブ ルの剛性と質量の変更や,鉄心とテーブルの間への防振ゴムの挿入などで低 減が可能と考えられるが,より確実なのは竪置き法の使用である。よって, これ以降の検討では竪置き法を用いることとした。 竪置きとするためには前述の様に鉄心の締め付けが必要である。その方法 は最終的に図2.6 に示すものとした。まず電磁鋼板の表面部分すべてを覆う 様に鉄心と同幅の木の板を当て,その上から C 型クランプで挟んで加圧す る。加圧位置は各脚 3 箇所,各ヨーク 3 箇所で計 15 箇所とした。また,ヨ ーク部分については,当て板を長めにしてその両端に穴を設けてボルトでも 締め付けた。締め付け圧力は,クランプとボルトそれぞれについてトルクと 加圧力の関係を事前に荷重計で求めておき,その関係を使って設定する。 図2.4 騒音測定位置(矢印はマイクロホンの方向)
U
V
W
③
②
①
⑥
⑦
⑧
④
⑤
0.3m
Model core
- 15 - a) 横置き法
b) 竪置き法
- 16 - 2.4 騒音測定位置に関する検討 2.4.1 鉄心騒音測定における検討課題 変圧器の騒音測定規格[2.9][2.10]では測定位置の具体的な間隔(点数)の決 定は測定者に任されているため,次の検討が必要となる。すなわち,3 相鉄 心では各脚が位相の異なる振動をする場合があり[2.14],音場が複雑になって いると考えられるため,測定位置を短距離動かすことで騒音レベルが変化す る可能性がある。よって正確な評価のためには騒音レベルの平均値が測定位 置に左右されない十分な位置数とすることが必要である。そこで次節におい て,測定点数を始めとする測定位置の検討をモデル鉄心騒音の実測によって 行う。なお,検討のための測定位置は図 2.7 に示す 8 点とする。この測定位 置は図に示す破線上で等間隔としている。 図2.6 騒音測定のためのモデル鉄心の構造 Bolt Clamp Timber plate Core Core Core joint 750mm 7 5 0 m m 1 5 0 m m 41mm
- 17 - 2.4.2 測定位置間の騒音差[2.15] まず,図2.7 の測定位置の間でどの程度の騒音差が生じるかを実測によっ て示す。鉄心形状を考慮すると,騒音値には図 2.7 の一点鎖線を中心とする 対称性が生じると考えられる。すなわち測定位置 2 と 6,4 と 8,1 と 7,3 と 5 に同等の値が出ると予想される。また 2 と 6 は鉄心前面の中心である ため,正対する振動面積が最も大きく,鉄心全体に対する平均距離が最短で あるため高騒音レベルになると予想される。 種類が異なる方向性電磁鋼板を用いてモデル鉄心 A と B を作製し,磁束 密度 1.3T と 1.7T で測定された各位置の騒音レベル LpAnを図 2.8 に示す。 位置番号 1 から 8 は図 2.7 の位置に対応する。鉄心 A では前記の予想に近 い対称性が見られ,また位置 2 と 6 が高い。しかし鉄心 B ではその対称性 が見られない位置もある。図 2.9 は騒音の主要周波数成分であった 300Hz と900Hz の騒音レベル LpAnfを図2.8 と同様に表したものであるが,これに も前記と同様の傾向が見られる。 図 2.7 騒音測定位置 (俯瞰図)
U
V
W
5
6
7
2
1
8
4
3
0.3m
Model core
- 18 - このように測定位置と騒音の関係は複雑であるため,測定位置を図 2.7 の 破線上でずらすと測定値が変化する可能性がある。すなわち,表 2.2 で示す 全測定位置の平均騒音レベル LpAが変化すると共に,鉄心 A と B の差も変 (a) 磁束密度 1.3T (b) 磁束密度 1.7T 図2.8 測定位置毎の騒音レベル
10
15
20
25
6
5
4
3
2
1
8
7
Core A
Core B
L
pAn
(dBA)
Position no.
30
34
38
6
5
4
3
2
1
8
7
Core A
Core B
L
pAn
(dBA)
Position
no.
表2.2 モデル鉄心 A,B の平均騒音レベルLpAとその差 磁束密度 Core A Core B A と B の差 1.3T 17.5 16.5 1.0 1.7T 34.5 34.0 0.5 (dBA)- 19 - 化し,最悪の場合は大小関係が逆転することもあり得ると考えられる。よっ て,それらを回避するための検討を行う必要がある。 2.4.3 平均値の誤差を考慮した測定位置数の検討[2.15] 測定位置間隔をより小さくすることで細かな位置変化による騒音変化を 調べると共に,平均騒音レベル LpAへの測定位置数の影響も明らかにする。 位置数を増すため,図2.7 の位置 8-1-2 の間に 2 点ずつ追加した図 2.10 の 7 点a~g で実測を行った。 (a) 300Hz 成分 (b) 900Hz 成分 図2.9 測定位置毎の騒音周波数成分 (磁束密度 1.7T)
10
20
30
40
6
5
4
3
2
1
8
7
Core A
Core B
L
pAnf
(dBA)
Position no.
10
20
30
40
6
5
4
3
2
1
8
7
Core A
Core B
L
pAnf
(dBA)
Position
no.
- 20 - 図 2.11 に各測定位置の騒音レベルを示す。1.5T と 1.7T では,測定位置 の移動による騒音レベル変化はほぼ滑らかで,1.3T も多少の上下はあるが 滑らかである。この1.7T の結果を周波数成分別に見た結果を図 2.12 に示す。 図2.10 細分化条件での騒音測定位置
U
V
W
e
f
g
d
a
c
b
0.3m
図2.11 測定位置毎の騒音レベル15
20
25
30
35
40
a
b
c
d
e
f
g
Ave.
No
ise lev
el
L
pAn(dB
A)
Microphone position
1.7T
1.5T
1.3T
- 21 - (a) 100Hz ~ 500Hz 成分 (b) 600Hz ~ 1000Hz 成分 図2.12 測定位置毎の騒音周波数成分 (磁束密度 1.7T)
5
15
25
35
a
b
c
d
e
f
g
Ave.
No
ise lev
el
L
pAnf(dB
A)
Microphone position
100Hz
400Hz
500Hz
200Hz
300Hz
5
15
25
35
a
b
c
d
e
f
g
Ave.
No
ise lev
el
L
pAnf(dB
A)
Microphone position
900Hz
800Hz
600Hz
700Hz
1000Hz
- 22 - 最主要成分は 300Hz であるが,位置 a,b では 800Hz が最も高く,図 2.11 の1.7T の曲線はこの 2 つの周波数成分に支配されていると考えられる。 騒音分布の単純予測から,鉄心前面の中心である g が正対する振動面積 が最も大きく平均距離が最短であるため最高騒音となり,そこから離れるに 従って騒音は低下していくと考えられる。しかしそれに従うのは 300Hz と 500Hz のみである。鉄心全面が均一に振動すれば前記の傾向が現れるが, 実際には鉄心の位置毎に振動が異なるため,図 2.12 の各曲線は様々な傾向 になると考えられる。またこれらの曲線は周波数が高い程,急峻に変化する 傾向がある。これは,音は高周波になる程,指向性が強くなるため粗密がで きやすいと考えられる。また,複数位置からの音波の相互干渉が,音の短波 長化によって短距離の測定位置移動で変化する事も理由と考えられる。 精度の高い測定を行うために位置数を何点以上にすべきかを,位置 a か らg の中で平均計算に使用する点数を変えることで検討した。すなわち,a,
g の 2 点,a,d,g の 3 点,a,c,e,g の 4 点,a~g の 7 点による平均値
を比較した。この時,図2.7 の 1 点鎖線で示す対称性を考慮した加重平均を することで全周の平均騒音レベルを推定した。図 2.13 にその結果を示す。 また,位置 a~g の 7 点の値に基づいて推定した全周 24 点の騒音レベル平 均値を真値と見なし,より少ない位置数で求めた平均値の誤差を算出した結 果を図 2.14 に示す。位置 a と g の値に基づく全周 4 点の騒音レベルには, 1.7T で 2dBA 以上の大きな誤差が発生している。一方,位置 a,d,g の値 に基づく全周 8 点での誤差は 0.6dBA 以下,更に位置 a,c,e,g の値に基 づく全周12 点での誤差は 0.3dBA 以下となっている。騒音レベルは数 dBA の差から議論されることが多いため,全周 4 点による平均値の誤差は過大 で,測定位置数が過少と言える。一方,全周 8 点以上では誤差はほぼ無視 可能と考えられるため,測定位置数は 8 以上にすべきと結論できる。
- 23 - 図2.13 異なる測定位置数で平均した騒音レベル
15
20
25
30
35
40
1.2
1.4
1.6
1.8
Estim
ated
n
o
ise lev
el
L
pA(dB
A)
Flux density Bm (T)
a,g
a,d,g
a,c,e,g
a-g
図2.14 測定位置数を減じて平均した騒音レベルの誤差-1
0
1
2
3
Er
ror
from
av
erage
o
f
a
-g
(dBA)
Flux density Bm (T)
a,g
a-g
a,c,e,g
a,d,g
1.2 1.4 1.6
1.8
- 24 - 図2.15 には 1.7T での周波数成分別の誤差を示すが,その誤差は高周波数 ほど大きくなる傾向がある。この理由は,図 2.12 で高周波数の成分ほど急 峻に変化することにあると考えられる。よって,高周波数の成分について議 論する場合には,測定位置数はできるだけ多い方が望ましいことがわかる。 2.4.4 測定距離の増加による誤差の低減[2.15] 測定精度を向上させるため,前節では測定位置数を検討した。他の精度向 上法として,鉄心から測定位置までの距離を増す方法がある。音の指向性が 強く,かつ複数の発音点がある場合には,距離を増す程,全発音点からの音 を捕えやすくなる。これにより測定位置間の騒音レベル差が減少し,測定位 置数を増さなくても精度を向上させることが可能と考えられる。そこで図 2.7 において,鉄心と測定位置間の距離を 0.3m から 0.6m に伸ばして実測 し,測定値の変化を調査した。 図2.15 測定位置数を減じて平均した騒音周波数成分の誤差 (磁束密度 1.7T)
-8
-4
0
4
8
Er
ror
from
av
erage
o
f
a
-g
(dBA)
Frequency (Hz)
Left ; a,g
Center ; a,d,g
Right ; a,c,e,g
100 300
500 700 900
- 25 - 各測定位置での騒音レベルを図 2.16 に示す。測定位置間の差の減少は 1.7T で顕著で,0.3m で大きな差が見られた測定位置 3 と 4 は,0.6m では ほとんど同値となっている。次に,測定位置間のバラツキを全体的に評価す るため,全位置の騒音レベルを母集団とする標準偏差を求めた。その結果を 図2.17 に示す。0.3m に対して 0.6m は全磁束密度で標準偏差が低下してい る。また,磁束密度の上昇に伴ってその差は拡大しており,1.7T では 1.5dBA となっている。これらの結果から,鉄心とマイクロホン間の距離を伸ばすこ とによって測定位置間の騒音レベル差は低下し,その結果,測定精度を向上 させることができると考えられる。 (a) 磁束密度 1.3T (b) 磁束密度 1.7T 図2.16 2 種類の測定距離での騒音レベル
10
15
20
25
6
5
4
3
2
1
8
7
0.3m
0.6m
L
pAn
(dBA)
Position
no.
20
30
40
6
5
4
3
2
1
8
7
0.3m
0.6m
L
pAn
(dBA)
Position
no.
- 26 - なお距離を伸長すると,距離減衰のために測定される騒音レベル値が低下 する。図2.18 には 0.3m と 0.6m での騒音レベルとそれらの間の差を示す。 距離の伸長による騒音レベルの低下量はほぼ 3dBA である。また,1.3T か ら1.7T にかけては差はわずかに低下する傾向であるが,1.8T になると逆に 増加している。次に騒音周波数成分を図 2.19 に示す。周波数毎の 0.3m と 0.6m の 差 は 一 部 を 除 い て ほ ぼ 同 程 度 の 値 と な っ て い る 。 特 異 点 と し て 800Hz と 900Hz があり,距離伸長によって逆に騒音レベルがわずかに上昇 している。また,1000Hz は距離伸長による低下量が他の周波数の 2 倍以上 となっている。これらの原因として,複数の発音位置からの音の干渉が距離 変化によって変化することが推定される。また,指向性が高い音の場合に, 測定位置が変わることで高音圧領域から逸脱して騒音レベルが大きく低下 した可能性もある。 図2.17 全測定位置の騒音レベルから算出した標準偏差
0
1
2
3
4
5
1.2
1.4
1.6
1.8
Stan
d
ard d
ev
iatio
n
o
f
n
o
ise lev
el
(dB
A)
Flux density Bm (T)
0.6m
0.3m
- 27 - 図2.18 2 種類の測定距離での騒音レベルとその差
10
20
30
40
50
60
1.2
1.4
1.6
1.8
Noise level
L
pA(dBA)
Flux density Bm (T)
0.6m
0.3m
0
1
2
3
4
5
Dif
ference between
0
.3m
and
0.6m
(dBA)
Difference
Noise level
図2.19 2 種類の測定距離での騒音周波数成分 (磁束密度 1.7T)0
10
20
30
40
100
300
500
700
900
1100
N
o
is
e
le
v
el
L
p A f(d
BA
)
Frequency (Hz)
Left ; 0.3m
Right ; 0.6m
- 28 - 前述の様に鉄心から測定位置までの距離を伸ばすと距離減衰によって騒 音レベルが低下する。この時に暗騒音や測定器のノイズが問題となることが あり得る。すなわち測定環境に元々存在する暗騒音や測定器のノイズが,測 定すべき音圧レベルに近い場合には測定誤差が発生する。この補正は(2.2) 式で行うが,測定された値と,暗騒音や測定器ノイズとの差が 3dBA 以下 になると測定値の有効性が損なわれる。そこで,モデル鉄心の騒音での距離 減衰を知っておくことが必要となる。 無限の自由空間に置かれた点音源による音圧には逆 2 乗則が成り立つ。 同様に音源が平面や線の場合には以下に示す法則がある[2.16]。図 2.20 には 全体が同振幅と同位相で振動する有限サイズの音源と音圧測定位置を示す。 平面音源は1 辺が ℓ (m)の正方形,線音源は長さ ℓ (m)とする。これらの中 心位置を通る垂線上に音源からの距離が d1,d2である位置 1,2 を設定し, それらの位置の音圧レベル Lp1,Lp2の間の差を考える。なお,d1 <d2とす る。 (a) 平面音源 (b) 線音源 図2.20 音源と騒音測定位置
d
1d
2ℓ
ℓ
1
2
d
1d
2ℓ
1
2
- 29 - 平面音源の場合,d2 <ℓ /πであると Lp1 =Lp2 となり,距離減衰は発生し ない。d1 >ℓ /πでは(2.3)式の k を 20 とする距離減衰が発生する。 ・・・・・・・・・・ ここで,Lp1,Lp2はそれぞれ位置 1,2 での音圧レベル(dB),d1,d2は位 置 1,2 の音源からの距離(m),k は定数である。線音源の場合は,d2 <ℓ / πであると(2.3)式の k を 10 とする距離減衰が,d1 >ℓ /πであると k を 20 とする距離減衰が発生する。なお,k =10 では 2 倍の距離(double distance = d.d.)で 3dB の,k =20 では 6dB の減衰が生じる。k はいずれの音源で も距離 ℓ /πで変化するが,それは不連続変化ではなく,その前後から緩や かに変化する。 変圧器鉄心については,振動の振幅と位相が鉄心の位置毎に変化し,更に 鉄心前面には窓がある。従って前述の法則は完全には成り立たないと予想さ れる。そこでモデル鉄心での実測結果と法則の対比を行った。測定位置は図 2.7 の 2,4,6,8 とし,鉄心前面の 2 と 6 では平面音源,鉄心側面の 4 と 8 では線音源の法則を比較対象とした。実測での鉄心中心と測定位置の距離 は位置2,6 では 0.1mから 1.5mまで,位置 4,8 では 0.1mから 0.8mまで とした。各測定位置は鉄心前面あるいは側面の中心を通る垂線上に配置した。 図2.21 に鉄心前面の位置 2 と 6 の距離変化による騒音レベル変化を示す。 法則では ℓ /πまでは減衰しないはずであるが,実測ではわずかな減衰が見 られる。また,ℓ /πよりも離れると法則では 6dB/d.d.の減衰が生じるが, 位置6 はそれにほぼ一致している。一方,位置 2 では数 dB のずれが見られ る。また,無減衰から-6dB/d.d.に移行する距離は,法則では ℓ /πであるが, 実測はより離れた所で移行しているように見える。
- 30 - 図2.21 鉄心前面での騒音の距離減衰(破線は面音源での理論値)
20
25
30
35
40
45
0.1
1
No
ise lev
el
L
pAn(dB
A)
Distance from core (m)
No.2
No.6
ℓ/π
0.5
2
0dB/d.d.
図2.22 鉄心側面での騒音の距離減衰(破線は線音源での理論値)20
25
30
35
40
0.1
1
No
ise lev
el
L
pAn(dB
A)
Distance from core (m)
No.4
No.8
ℓ/π
0.5
- 31 - 図 2.22 には鉄心側面の位置 4 と 8 の距離による騒音レベル変化を示す。 法則ではℓ /πまでは 3dB/d.d.の減衰が生じるが,実測の減衰率は若干低い。 また,ℓ /πよりも離れると法則では 6dB/d.d.の減衰が生じるが,位置 8 は それにかなり一致している。一方,位置 4 では減衰率が低めで数 dB のずれ が見られる。また,-3dB/d.d.から-6dB/d.d.に移行する距離は,法則では ℓ / πであるが,実測はより離れた所で移行しているように見える。 図2.23 には鉄心前面の位置 2 と 6 の距離変化による騒音周波数成分の変 化を示す。周波数は主要成分であった 300Hz と 800Hz を選んだ。これらも 前述と同様の傾向を持つが,800Hz では鉄心に近い位置で距離の増加に伴 って騒音が逆に増加する傾向が見られる。 以上の結果から,モデル鉄心と法則の間に距離減衰の減衰率とその移行距 離の厳密な対応はないと言える。この原因として,鉄心振動の振幅と位相が 鉄心上の位置毎に異なる,鉄心前面には窓が存在する,鉄心側面は鉄心前面 からの音の回り込みがあることなどが考えられる。しかし,実測と法則に極 端な乖離はないため,距離減衰の法則は粗見積りには使用可能と判断できる。 2.4.5 測定位置に関する検討のまとめ モデル鉄心を用いて騒音評価を行う場合の騒音測定位置について検討を 行った結果,下記の点が明らかになった。 まず,モデル鉄心で使用した電磁鋼板などが変わると騒音分布が変化する ため,騒音測定位置の決め方が評価に影響を及ぼす可能性がある。精度の高 い評価を実施するためには騒音測定位置数は 8 点以上とする必要がある。 また,鉄心と測定位置の距離を増すことも精度向上に有効であるが,距離減 衰による測定値の低下で暗騒音による誤差が問題化する可能性がある。この 時,面音源や線音源での距離減衰の法則がモデル鉄心でもおおよそ成り立つ ため,減衰量の粗い見積もりに使用できる。
- 32 - (a) 300Hz 成分 (b) 800Hz 成分 図2.23 鉄心前面での騒音周波数成分の距離減衰 (破線は面音源での理論値)
20
25
30
35
40
0.1
1
No
ise lev
el
L
pAnf(dB
A)
Distance from core (m)
No.2
No.6
-6dB/d.d.
ℓ/π
0.5
2
0dB/d.d.
15
20
25
30
35
0.1
1
No
is
e le
v
el
L
pA nf(d
B
A)
Distance from core (m)
No.2
No.6
ℓ/π
0.5
2
- 33 - 2.5 モデル鉄心による評価の有効性 本研究で騒音評価に用いるモデル鉄心は 2.3 節で述べた様に正面の高さ と幅を共に750mm とした。一方,大容量の実機変圧器の鉄心はサイズが大 きく,一辺が3m を超すような場合も珍しくない。そのような大型鉄心での 騒音の諸現象を小型のモデル鉄心による実験で評価できるかどうかを検討 しておく必要がある。また,騒音評価の際の鉄心から測定位置までの距離は, モデル鉄心の場合には 2.4 節で述べた様に 0.3m とした。しかし実機測定で は規格でのもう一つの値である 2m とすることも多い。この測定距離の相違 についても考察しておく必要がある。 ここで,発音体として球を考え,それが膨張と収縮の振動を繰り返すこと で音波が発生している状態を想定する。この球の振動はそのまま音圧に変換 され,その音波が無反射の空間に拡散していくと仮定する。その時の球から 十分離れた位置での音圧レベルは次式で表すことができる。 ・・・・・・・・・・ ここで,Lpは音圧レベル(dB),M は球の半径 1m 当たりの振動速度(m/s),k は球の半径(m),α は振動の音波への変換効率と伝搬する音波のエネルギー 損失,r は球から音圧レベル測定位置までの距離(m)である。 前記の鉄心サイズと測定距離の問題は変数 k と r の変化となって考慮され るが,この 2 変数は(2.4)式から最終的に M の項への加算項となることが わかる。ところで本研究が検討対象とする鉄心での騒音因子の影響は M の 変化として表現される。これらの点から,鉄心の騒音影響因子の変化による 音圧レベルの変化量は,鉄心サイズや測定距離には影響されないことが説明 できる。つまり騒音影響因子による騒音変化は,小型のモデル鉄心を用いて
- 34 - 定量評価しても大型鉄心にそのまま適用可能であり,同時に,騒音測定距離 が異なっても影響を受けないことがわかる。 2.6 振動測定システムの開発[2.17] 振動測定手法としては,加速度ピックアップとチャージアンプを用いるも のが普及している。これは測定点にピックアップを密着させて振動を測定す る方法である。そのピックアップの移動は自動化が難しいため,測定点が多 数となる場合には多大な労力が必要となる。これが鉄心の詳細な振動測定が 行われなかった原因の一つと考えられる。また,変圧器の鉄心材料には板厚 0.35mm 以下の薄鋼板が用いられるが,これにピックアップの質量を付加す ると鋼板本来の振動が変化して誤差が発生するという問題もある。 そこで,本研究ではレーザードップラ方式による振動センサを用いること にした。この方法は,レーザー光を振動測定点に照射し,ドップラ効果で周 波数変調を受けた反射光と基準光を合成した時に発生するビートの周波数 から被測定点の振動速度を測定するものである。この方法では測定は非接触 で行われるため,前述の誤差の発生は避けられる。また,今回用いた振動セ ンサは 2 枚の可動反射鏡を内蔵しており,外部からの制御でレーザー光を 水平と垂直それぞれの方向に移動させることが可能となっている。この機能 をコンピュータで制御することで多点測定の全自動化が可能となった。 測定システムの構成を図 2.24 に示す。振動センサの出力をハイパスフィ ルタ経由とし,床面から伝搬される低周波振動を除去する。その出力は増幅 された後,デジタル波形記憶装置に記録される。一方,鉄心には 1 ターン のサーチコイルを設けてあり,その出力も前述の波形記憶装置に入力される。 波形記録のトリガをこのサーチコイルの信号を用いてかけることで,振動波 形を鉄心の磁束密度波形と対応させて観察できる機能を実現した[2.18]。 デジタル波形記憶装置のサンプリングは,コンピュータからのクロック信
- 35 - 号で行われる。今回の測定では振動波形の 1 周期あたり 256 点のサンプリ ングが行われるように設定した。また,波形記憶時には60 回のアベレージ ングが行なわれ,ランダムノイズが低減される。記録された波形データはコ ンピュータへ転送されて,様々な処理が実施される。たとえば振動変位波形 を得るときには,測定された振動速度波形の台形積分演算が行われる。 測定位置制御のためのレーザー光の方向の制御は,コンピュータで制御さ れる 2 チャンネル D/A 変換器の出力を振動センサへ入力して行われる。各 チャンネルは垂直方向と水平方向の制御を行うためのもので,一定領域内の 任意の点にレーザー光を照射して振動を測定することができる。この機能を 応用したプログラムによって,任意の面内に設定された複数の点の振動を順 に自動測定していくことができる。これにより測定の大幅な省力化が可能と なったため,測定点数を飛躍的に増加させることができ,面内の振動強度分 布などが容易に得られるようになった。 図2.24 振動測定システムの構成 振動 センサ ハイパス フィルタ 増幅器 コンピュ ータ CLK D/A D/A 変圧器鉄心 レーザ ビーム GP-IB 反射鏡 制御 励磁電源 磁束電圧計 波形 記憶 装置 ch1 ch2 サンプリングクロック
- 36 - 2.7 磁歪測定法 磁歪は励磁騒音の根本原因で,電磁鋼板の素材特性として評価される。従 って測定では単板サンプルを交流励磁し,発生する伸縮を振動として計測す る方法が多く用いられる[2.19]。本研究で用いる磁歪測定装置では 100mm× 500mm サイズの単板サンプルを使用し,片側を固定して反対側に現れる振 動を,レーザー光のドップラ効果を利用する振動計で測定する[2.20]。振動計 の出力は速度信号であるため,積分器によって変位信号に変換され,デジタ ルオシロスコープに記録される。このデータはコンピュータに転送され,振 動変位のピーク値を始めとする様々な特性値が得られる。励磁騒音は高調波 を多く含むため,磁歪でも高調波成分の振幅を知ることが重要である。その ため,コンピュータ内で波形データに対して FFT が行われる。 電磁鋼板の磁歪はその圧延方向への圧縮応力で変化することが知られて いる。用いた磁歪測定装置には単板サンプルの長手方向に対して圧縮応力を 加える機構が備わっており,圧縮応力による磁歪変化を実測によって調査す ることができる。 磁歪の評価指標には,図 2.25 に示す変位の振幅(peak-to-peak 値)に加え て0-to-peak 値も用いられる。これは,サンプルの磁化が 0 である時点を基 準として,磁化最大の時点での変位を求めるものである[2.21]。方向性電磁鋼 板の圧延方向の 0-to-peak 値は一般的に,磁化の増加に伴ってまず負値をと る。すなわち板が収縮する歪が発生する。更に磁化が増加して飽和磁化に近 づいていくと負方向への増加が止まって逆に再び 0 に接近していき,その 後は正に転じる。この挙動の理由は磁区構造の変化によって説明されている [2.22]。なお,磁歪変位は磁化の絶対値で決まるため,図 2.25 で示す様に磁 歪の基本周波数は磁化の周波数の 2 倍となり,例えば 50Hz 励磁の場合には 100Hz となる。これは騒音についても同様である。前記以外の磁歪評価指 標として磁歪速度レベルがあるが,これは次節で詳述する。
- 37 - 2.8 振動の騒音レベルへの換算方法 ここでは音響理論に基づいて振動を音としてどのように数学的に表すべ きか,あるいは振動をどのように騒音レベルに換算するか,その考え方を示 す。3 次元の音の波動方程式は(2.5)式で表される[2.11]。 ・・・・・・・・・・
ここで,p は音圧(Pa),t は時間(sec),K は空気の体積弾性率(Pa),ρ は空気 の密度(kg/m3)である。 音が x 方向に進行する平面音波の場合は,(2.5)式に基づいて(2.6)式 が得られる[2.11]。 図2.25 磁歪の評価指標 0-to-peak 磁歪 max 磁化 時間 時間 Peak-to-peak
- 38 - ・・・・・・・・・・ ここで,c は音速(m/sec),v は空気の粒子速度(m/sec)である。 音の大小はパワーの大きさで表される。このパワーは音圧の実効値[2.11] であり,(2.6)式の音圧と粒子速度の関数をフーリエ級数で表すことによっ て,(2.7)式で求められる。 ・・・・・・・・・・ ここで,Peは音圧の実効値(Pa),T は音圧波形の基本周期(sec),Viは空気の 粒子速度の i 次高調波の実効値(m/sec)である。 次に(2.7)式に A 特性の聴感補正を導入し,更に空気の粒子速度を変位 に変換すると(2.8)式が得られる。 ・・・・・・・・・・ ここで,PeAは A 特性で補正された音圧の実効値(Pa),fiは i 次高調波の周 波数(Hz),Aiは空気の粒子変位の i 次高調波の波高値(m),αiは i 次の周波数 でのA 特性補正値である。 人が刺激の強さの変化を感じる時,強い刺激ほど変化に対して鈍感となる。 よって,刺激の対数関数をとることで刺激の大小感覚に近づけることができ る。(2.8)式にこれを適用したのが(2.9)式で示す音圧レベルである。
- 39 - ・・・・・・・・・・ ここで,LpAは A 特性で補正された音圧レベル(dBA),P0は基準音圧(Pa)で ある。P0 は 1kHz で人が聞き取ることのできる最小音圧を元に決められて おり,2×10-5Pa が使用される。 (2.9)式でAiは空気粒子の変位であるが,音源である固体の表面振動が 無損失で空気に伝達されると仮定すると,固体の極めて近傍の空気の音圧レ ベルは(2.9)式の Ai に固体表面の振動変位を入力することで求められる。 よって,例えば Aiに磁歪の振幅[2.23]~[2.25]や鉄心の表面振動の振幅を入力す ると,それらを騒音レベルに換算することができる。現実的には騒音は固体 表面からある程度離れた位置で聴かれるため,正確を期すためには場におけ る音の拡散や干渉を考慮する必要があるが,例えば 2 種類の電磁鋼板が磁歪 で発生させる音を単純に比較するような場合には,その差を見積もる方法と して有効である可能性がある。 なお,前述の振動が固体から空気に無損失で伝達される点については,今 後の検討が必要である。 2.9 結言 本章では変圧器騒音に関連する測定と評価の方法及び技術について検討 を行った。その結果を以下にまとめる。 (1) 騒音評価に用いるモデル鉄心の設置方法を検討し,横置きでは鉄心を設 置するテーブルの振動が影響するため,竪置きが望ましいことを見出し た。 (2) モデル鉄心の騒音測定位置について検討を行った結果,位置数は 8 点以 上とする必要があることが判明した。
- 40 - (3) モデル鉄心の騒音評価の精度を上げるためには,鉄心と測定位置の距離 の増加も有効である。その時の距離減衰には,面音源や線音源での理論 的法則がおおよそ成り立つことを確認した。 (4) モデル鉄心の振動測定法としてレーザー振動計を用いたシステムを開 発した。自動測定化によって測定の大幅な省力化が可能となり,測定点 数を飛躍的に増加させることができた。 (5) 磁歪や鉄心の振動を音響理論に基づいて音圧レベルに換算する方法を 明示した。 参考文献 [2.1] 「けい素鋼板の磁気ひずみと変圧器鉄心の騒音」,電気学会技術報告, 第 101 号 (1971)
[2.2] A.J. Moses and S.M. Pegler, ”The effects of flexible bonding of laminations in a transformer core”, Journal of Sound and Vibration, Vol.29, No.1, pp.103-112 (1973)
[2.3] 石田,佐藤:「3 相積鉄心モデルトランス騒音の解析」,電気学会マ グネティックス研究会,MAG-93-187 (1993)
[2.4] 鍋嶋,長江,小松:「単相変圧器モデル鉄心を用いた鉄心騒音に関す る 実 験 的 検 討 」, 電 気 学 会 マ グ ネ テ ィ ッ ク ス 研 究 会 ,MAG-95-21 (1995)
[2.5] Z. Valkovic, ”Investigations of core noise levels using a dry-type transformer model”, Journal of Magnetism and Magnetic Materials, Vol.160, pp.205-206 (1996).
[2.6] B. Weiser, A. Hasenzagl, T. Booth, and H. Pfützner, ”Mechanism of noise generation of model transformer cores”, Journal of Magnetism and Magnetic Materials, Vol.160, pp.207-209 (1996).
- 41 -
[2.7] M. Mizokami, M. Yabumoto, H. Mogi, and T. Kubota, “Magnetostriction of grain-oriented electrical steel and noise of transformers”, Proceedings of twenty fourth annual conference on properties and applications of magnetic materials, Session 2, Paper 4 (2005).
[2.8] D. Snell, ”Measurement of noise associated with model transformer cores”, Journal of Magnetism and Magnetic Materials, Vol.320, pp.535-538 (2008).
[2.9] 電気学会電気規格調査会:「変圧器」,JEC-2200 (1995)
[2.10] International Electrotechnical Commission, ”Power transformers - Part 10: Determination of sound levels”,International standard, IEC 60076-10 Edition 1.0 (2001).
[2.11] 小橋:音と音波,裳華房 (1987)
[2.12] 溝上,岩崎,野沢,佐久間:「変圧器騒音のモデル鉄心を用いる評価
法の検討および測定結果の解析」,平成 4 年電気学会全国大会,886
(1992)
[2.13] F.J. Fahy, Sound Intensity, Elsevier science publishers (1989). [2.14] 溝上,籔本,岡崎:「3 相モデル変圧器鉄心の振動解析」,電気学会 論文誌 A,Vol.116-A,No.8, pp.744-749 (1996) [2.15] 溝上:「変圧器モデル鉄心のための騒音評価方法の検討」,電気学会 マグネティックス研究会,MAG-13-154 (2013) [2.16] 一宮:機械系の音響工学,コロナ社 (1992) [2.17] 溝上,茂木,野沢:「変圧器鉄心振動測定システムの開発」,平成 5 年電気学会電力・エネルギー部門大会,589 (1993) [2.18] 特許公報:「変圧器鉄芯振動測定方法」,2863430 号 (1998) [2.19] 籔本,溝上,茂木,新井:「任意波形励磁による磁歪測定技術の開発」
- 42 - 電気学会マグネティックス研究会,MAG-96-113 (1996) [2.20] 茂木,溝上,籔本,岡崎:「レーザ非接触式磁歪測定法とその適用」, 電気学会計測・マグネティックス合同研究会,IM-94-44,MAG-94-65, (1994) [2.21] 溝上:「電磁鋼板に発生する磁歪現象の概要」,月刊 EMC,No.252, 2009 年 4 月号,ミマツコーポレーション (2009) [2.22] 新井:「電磁鋼板の補助磁区構造と磁区制御技術について」,日本応 用磁気学会誌,Vol.25,No.12,pp.1612-1618 (2001) [2.23] 木村:変圧器の設計工作法,電気書院 (1960)
[2.24] E. Reiplinger, ”Assessment of grain-oriented transformer sheets with respect to transformer noise”, Journal of Magnetism and Magnetic Materials, Vol.21, pp.257-261 (1980)
[2.25] IEC Technical Report, ”Electrical steel - Methods of ment of the magnetostriction characteristics by means of single sheet and Epstein test specimens”, IEC/TR62581 (2010)