目次
第 第 第 第1章章章章 序論序論序論序論 3 1.1 研究背景・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3 1.2 研究目的・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・4 第 第 第 第2章章章章 外乱外乱外乱 オブザーバ外乱オブザーバオブザーバオブザーバ ににに基に基 づく基基づくづく 内部づく内部内部内部 モデルモデルモデルモデル 制御系制御系制御系制御系(DIMC) 5 2.1 内部モデル制御系(IMC)・・・・・・・・・・・・・・・・・・・・・・・・・5 2.1.1 内部モデル制御の位置制御系への応用とその問題点・・・・・・・・・6 2.2 PID制御器に基づく内部モデル制御系(IMC-PID)・・・・・・・・・・・・・・9 2.3 外乱オブザーバに基づく内部モデル制御系(DIMC)・・・・・・・・・・・・・10 2.3.1 外乱オブザーバ・・・・・・・・・・・・・・・・・・・・・・・・10 2.3.2 外乱オブザーバに基づく内部モデル制御系・・・・・・・・・・・・11 2.3.3 任意の外乱に対する補償法・・・・・・・・・・・・・・・・・・・13 2.4 制御器の離散パラメータ・・・・・・・・・・・・・・・・・・・・・・・・18 2.5 制御入力飽和に対するAnti-Windup化の検討・・・・・・・・・・・・・・・21 第 第 第 第3章章 章章 DIMCにににに 対対対対 するする 適応機構するする適応機構適応機構 の適応機構ののの導入導入導入 導入 25 3.1 モデル化誤差の検討・・・・・・・・・・・・・・・・・・・・・・・・・・25 3.2 DIMCの適応化アルゴリズム・・・・・・・・・・・・・・・・・・・・・・28 3.2.1 制御器の適応アルゴリズム・・・・・・・・・・・・・・・・・・・28 3.2.2 可変忘却要素を用いた逐次最小二乗(VFF-RLS)法・・・・・・・・・29 3.2.3 DIMCの適応化の導入・・・・・・・・・・・・・・・・・・・・・30 第 第 第 第4章章 章章 DIMCのののの 産業分野産業分野への産業分野産業分野へのへの 応用への応用応用 応用 31 4.1 非共振型超音波アクチュエータ駆動精密ステージへの応用・・・・・・・・・31 4.1.1 SPIDER駆動ステージ・・・・・・・・・・・・・・・・・・・・・31 4.1.2 SPIDERの動作原理・・・・・・・・・・・・・・・・・・・・・・34 4.1.3 シミュレーション結果・・・・・・・・・・・・・・・・・・・・・36 4.1.4 実験結果・・・・・・・・・・・・・・・・・・・・・・・・・・・46 4.2 自動車エンジンの可変バルブリフト制御への応用・・・・・・・・・・・・・ 604.3.2 シミュレーション結果・・・・・・・・・・・・・・・・・・・・・76 第 第 第 第5章章章章 まとめまとめまとめまとめ 87 謝辞 謝辞 謝辞 謝辞 89 参考文献 参考文献 参考文献 参考文献 90 発表文献 発表文献 発表文献 発表文献 92
第
第
第
第1
1
1
1章
章
章
章
序論
序論
序論
序論
1.1
背景
背景
背景
背景
昨今の急速な技術革新により、電子機器の性能向上により高速・高応答・高精度特性を有する 製品が市場に台頭してきた。その中で、高い制御性能が要求される分野の一例として、半導体露 光装置用精密ステージの位置決め制御を例にとる。精密ステージ制御の観点から見ると、主に以 下の制御特性が要求されている。 • 製品スループット向上のための高速・高応答特性 • 位置センサ分解能内への高精度位置決め特性 • オンサイトセットアップのための少ない設計パラメータ数 • 経年変化に対する制御性能の保持 高い制御性能が要求される分野では、各種制御理論が応用されているが(1~3)、設計法および調 整法が困難である場合が多く、またこれらの系ではフィードバック制御を前提とした制御系で構 築されていることが多い。フィードバック制御では、観測される制御量の結果を受け取ってから 誤差を修正するため、修正動作が後追いになってしまい、目標値の応答性において、所望の特性 を満たさない場合がある。また、外乱が生じると必ずその影響を受けることになる。さらに、制 御量が所望の状態にあったとしてもセンサなどの検出器にノイズが存在した場合、フィードバッ クループによりノイズ増幅し、系が発散する場合もある。そこで近年では実現が容易で、安定性 において優れるフィードフォワードを基本とした制御系に対する需要が高まっている。
1.2
目的
目的
目的
目的
本研究ではオープンループのフィードフォワード制御を基本とした高速・高応答・高精度の制
御系の構築を目的とする。オープンループ駆動フィードフォワード型の制御器として、制御性能
の逆特性を利用したオープンループ駆動を基本とし、モデル化誤差と外乱が存在する場合にのみ
フードバック補償をおこなう制御系として内部モデル制御(Internal Model Control:IMC)が報告さ
れている(4)。しかし、位置制御系のように制御対象が積分特性を有する制御対象の場合、IMCで はステップ外乱に対して追従誤差が常に存在してしまう。 本研究で提案する手法では、IMC に外乱オブザーバを導入することで、上述した問題を解決 する。提案手法の特徴としては、制御対象の逆特性を利用したオープンループ駆動ベースの制御 系で構成され、モデル化誤差と外乱に対してのみフィードバック補償を行う。これにより、目標 値に対して行き過ぎ量が皆無であり、かつ制御対象のノミナルモデルさえ高精度に同定できれば 制御帯域幅を極めて広帯域化でき、安定性、ノイズ特性にも優れる。さらに、制御器内に制御対 象のノミナルモデルを含んでいるため、モデル化誤差および制御対象の経年劣化のように制御対 象のダイナミクスの変化に対しては適応機構を導入することでその補償を行う。 提案手法は高速・高応答・高精度化が要求される位置制御系全般に導入可能である。例えば、半 導体製造装置、電子線測長装置、電子線描画装置、DVDマスタリングに導入可能であ、本手法の 導入により、生産性向上や素子の微細化が期待できる。他にも、NC 工作機、産業用ロボット、 自動車の可変バルブリフト量制御などの位置制御機構を有する分野やディジタル制御電源など、 ほとんどの制御分野に適用可能であり、同様の効果が期待できる。 本研究では、IMC に外乱オブザーバを導入し、その有効性をエンジンの可変バルブリフト量 制御およびディジタル制御電源においてはシミュレーションを通して検証する。また、精密ステ ージの位置決め制御では、シミュレーションおよび実験を通して検証する。 本論文は以下のような構成となっている. 第2章では外乱オブザーバに基づく内部モデル制御を提案し、第 3章では経年変化に対する 制御性能の保持として外乱オブザーバに基づく内部モデル制御に適応機構を導入し、第 4 章で は各種産業分野への応用を検討し、第5章で本論文のまとめを述べる。
第
第
第
第
2
章
章
章
章
外乱
外乱
外乱オブザーバ
外乱
オブザーバ
オブザーバに
オブザーバ
に
に
に基
基づく
基
基
づく
づく
づく内部
内部
内部
内部モデル
モデル
モデル制御系
モデル
制御系
制御系
制御系
(DIMC)
2.1
内部
内部
内部
内部モデル
モデル
モデル制御系
モデル
制御系
制御系
制御系
(IMC)
内部モデル制御(IMC)は、M.Morariによって提唱されたプロセス制御系に対する制御法であ る。これは 2H
制御やスミス予測制御に関連しており、Youla のパラメトリゼーションを基本 とした具体的なプロセス制御系の設計法としてまとめられている。 この内部モデル制御系のブロック図を図2.1に示す。P(s)、Pn(s)は制御対象とそのノミナルモ デルを表す。ここでsはラプラス演算子を表す。F(s)は定常ゲインが1のローパスフィルタであ り、IMCコントローラF(s)×Pn -1 (s)を物理的に実現させるため、この伝達関数がバイプロパーと なるように選択する。例えば、P n(s) の相対次数をnとすると、 n is
s
F
)
1
(
1
)
(
+
=
τ
(2.1.1) となる。この場合、制御対象が既知とすると、IMCの設計パラメータはフィルタの帯域幅1/τi [rad/s]のみであり、設計および調整が容易な点が利点である。また、この制御構成からわかるよ うに、IMCではモデル化誤差がなく、かつ外乱が存在しなければ、目標値rから出力yまでの伝 達特性はF(s)となる。すなわち、フィードバックループが無く直列補償器によるオープンループ 駆動である。これに対して、モデル化誤差や外乱dが存在する場合にのみ、PとPnの出力の差 分を利用し、フィードバックにより誤差補償が行われる。+
−
+
−
+
−
y
d
r
P
n(s)
P(s)
F (s)
・
P
n−1(s)
+
−
+
−
+
−
y
d
r
P
n(s)
P(s)
F (s)
・
P
n−1(s)
F (s)
・
P
n−1(s)
Plant model Plant Controlle r 図2.1.1 内部モデル制御系のブロック図2.1.1
内部モデル制御法の位置制御系への応用とその問題点
IMCを一般的なアクチュエータを動力源として用いた位置制御系に応用する。制御対象のモ デルPnが式(2.1.2)で与えられるとする。入力は力(又はトルク)であり、出力は位置(また角度) とする。速度から位置への伝達特性である積分特性と粘性特性が考慮されていることに注意する。 一般的に位置制御系の制御対象の伝達関数は2次系まで低次元化できるので)
(
)
(
1 1p
s
s
k
s
P
n+
=
(2.1.2) とすると、 2)
1
(
1
+
=
s
F
iτ
(2.1.3) となる。例えばk1=1365、p1=215、P=Pnとしてステップ位置指令に対するシミュレーションを行 った結果を図2.1.2に示す。ここで、τi=1/(2π×80)とした。0 sで0.05 mmのステップ位置指令を 印加し、0.1 sでステップ外乱(制御入力の最大値の20%相当)を印加している。以下、目標値と 外乱はステップ状と仮定する。また、比較のために同程度の帯域幅を持つPID制御系の応答波 形を重ねて示す。用いたPID制御器は)
10
31
.
5
1
(
)
00465
.
0
1
(
10
62
.
5
)
0159
.
0
1
(
)
(
4 4s
s
s
s
C
PID − −×
+
+
⋅
×
+
=
(2.1.4) である。IMC制御系では、目標値特性においてはオーバーシュートもなく良好な制御特性が得 られているが、外乱応答においては定常偏差が残っている。これに対し、PID制御系では、目標 値応答においては10%程度オーバーシュートが見られるものの、外乱に対してはドロップ量も 小さく、定常偏差補償が達成できている。参考に設計したPID制御器ならびにIMC制御器の周 波数特性を図2.1.3に示す。IMC制御器では、PID制御器が有する一形の積分特性が得られてい ないことが分かる。位置制御系においては、少なくとも一形の世紀分特性が必要不可欠である。 このIMCの外乱特性について考察する。IMC制御器は、制御対象が積分特性を有する場合、低 域で制御ゲインが無限大という一形の特性を持たない。すなわち、モデル化誤差および外乱のな いシステムは存在しないということに鑑み、位置制御系にIMCを適用した場合、目標値指令に 対しても必ず定常偏差が生じることとなる。以下、簡単な準備の下、例によりその理由を示す。 図2.1.1のブロック図を等価変換すると図2.1.4となる。等価変換したブロック図より、z=F(s) (e+z) であり、e
s
F
s
F
z
)
(
1
)
(
−
=
(2.1.5) となる。IMCフィルタFの定常ゲインは常に1となるため、eからzへの定常ゲインは無限大で ある。すなわち、一形(積分特性)である。しかしながら、P(s)が積分特性を有するとPn -1 (s)は微 分特性を持つので、F(s)/{1-F(s)}の積分特性を打ち消してしまう。その結果、目標値rに対して は定常誤差が生じてしまう。PID
IMC
0
0.04
0.08
0.12
0.16
0.2
Time [s]
-0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
P
o
s
it
io
n
[
m
m
]
PID
IMC
PID
IMC
0
0.04
0.08
0.12
0.16
0.2
Time [s]
0
0.04
0.08
0.12
0.16
0.2
Time [s]
-0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
-0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
P
o
s
it
io
n
[
m
m
]
図2.1.2 ステップ応答波形30
32
34
36
38
40
42
44
46
48
50
G
a
in
[
d
B
]
10
110
210
310
410
5Frequency [rad/sec]
PID
IMC
30
32
34
36
38
40
42
44
46
48
50
G
a
in
[
d
B
]
10
110
210
310
410
5Frequency [rad/sec]
10
110
210
310
410
5Frequency [rad/sec]
PID
IMC
PID
IMC
図2.1.3 制御器の周波数応答波形F
P
n-1P
r
y
d
+
+
+
−
−
−
e
C
IMCz
F
P
n-1P
r
y
d
+
+
+
−
−
−
e
C
IMCz
図2.1.4 IMCブロック図の等価変換以下では制御対象に積分特性を含む場合と含まない場合のIMC制御系について考察する。 (1) (1) (1) (1) 制御対象制御対象 に制御対象制御対象ににに 積分特性積分特性積分特性積分特性がが 含がが含含含 まれないまれないまれない 場合まれない場合場合 場合 例えば、簡単なモデルとして制御対象のモデルが
1
1
+
=
s
P
n (2.1.6) で与えられた場合、IMC制御器CIMCはs
s
s
s
P
F
F
C
i i n IMCτ
τ
1
)
1
(
1
)
1
(
1+
=
+
⋅
=
−
=
− (2.1.7) となり、制御器には積分器が残る。また、目標値応答および外乱応答はd
s
s
s
u
s
y
r
s
s
d
s
y
i i i i(
1
)
(
1
)(
1
)
1
)
(
1
1
1
+
+
+
+
=
−
+
+
+
=
τ
τ
τ
τ
(2.1.8) となり、目標値応答はフィルタの応答となり、外乱応答は微分特性により定常偏差は残らない。 (2) (2) (2) (2) 制御対象制御対象 に制御対象制御対象ににに 積分特性積分特性積分特性積分特性がが 含がが含含含 まれるまれるまれる 場合まれる場合場合 場合 制御対象に積分特性が含まれ、モデルが次式で与えられたとする。s
P
n1
=
(2.1.9) このときIMC制御器CIMCは i i n IMCs
s
P
F
F
C
τ
τ
1
1
)
1
(
1=
⋅
=
+
=
− (2.1.10) となり、制御器の積分器が消滅する。目標値応答および外乱応答特性はd
s
r
s
y
r
d
s
y
i i i i 2)
1
(
1
1
)
(
1
1
+
+
+
=
−
+
=
τ
τ
τ
τ
(2.1.111) となり、目標値に対しては定常偏差が残らないが、外乱応答には定常偏差が残る。2.2
PID
PID
PID
PID
制
制
制
制御器
御器に
御器
御器
に
に
に基
基
基
基づく
づく内部
づく
づく
内部
内部モデル
内部
モデル
モデル制御系
モデル
制御系
制御系
制御系
(IMC
(IMC
(IMC
(IMC
−−−−
PID)
PID)
PID)
PID)
前節で示したように、位置制御系のように制御対象が積分特性を含む場合、IMC は有効では ない。これを解決する手法としてIMCフィルタF(s)を次のように設計する。 1)
1
(
1
)
1
(
)
(
++
+
+
=
n i is
s
n
s
F
τ
τ
(2.2.1) この手法はIMC-PID (4) と呼ばれ、IMC制御器を等価的にPID制御器とみなすことができる。こ れにより目標値応答および外乱応答に定常偏差は残らない。しかしながら、PID 制御器と等価 であるのでモデル化誤差や外乱が存在しない場合でも目標値応答において必ずオーバーシュー トが発生してしまう。 制御対象のモデルPnを以下の式で与える。)
(
)
(
1 1p
s
s
k
s
P
n+
=
(2.2.2) ここで、k1、p1は前節と同様とし、P(s)=Pn(s)とする。制御対象が 2 次系であるので 3)
1
(
1
3
)
(
+
+
=
s
s
s
F
i iτ
τ
(2.2.3) としてステップ応答シミュレーションを行った結果を図 2.2.1 に示す。シミュレーション条件も 2.1節と同様とする。また、比較のために同帯域でのIMC制御系の応答波形を重ねて示す。IMC-PID 制御系では、目標値応答においては10%程度オーバーシュートが見られるが、外乱に対してはド ロップ量も小さく、定常偏差も補償できている。また、図2.2.2からIMC-PID制御器ならびにIMC 制御器の周波数特性を比較するとIMC-PID制御器は一形の積分特性が得られ、定常偏差が補償さ れていることが分かる。 0 0.04 0.08 0.12 0.16 0.2 -0.01 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 IMC IMC-PID P o s it io n [ m m ] 0 0.04 0.08 0.12 0.16 0.2 0 0.04 0.08 0.12 0.16 0.2 -0.01 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 -0.01 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 IMC IMC-PID P o s it io n [ m m ] -100 -90 -80 -70 -60 -50 -40 -30 G a in [ d B ] 0 1 2 3 4 -100 -90 -80 -70 -60 -50 -40 -30 -100 -90 -80 -70 -60 -50 -40 -30 G a in [ d B ] 0 1 2 3 4 0 1 2 3 42.3
外乱
外乱
外乱
外乱オブザーバ
オブザーバ
オブザーバ
オブザーバに
に
に
に基
基 づく
基
基
づく
づく
づく内部
内部
内部
内部モデル
モデル
モデル
モデル制御系
制御系
制御系
制御系
(DIMC))))
前節のIMC-PID制御系では目標値応答および外乱応答には定常偏差が残らない。しかし、目 標値応答に対してオーバーシュートが発生してしまう。これを解決する手段として内部モデル 制御系に外乱オブザーバ (5) を導入する手法を以下に提出する。2.3.1
外乱オブザーバ
外乱オブザーバは、制御入力と出力情報を用いて制御対象にかかる外力を推定し、それを フィードバックすることで外乱補償を行うものである。 外乱オブザーバのブロック図を図2.3.1(a)に示す。ここで外乱をd、入力をiref、制御対象の 伝達関数をP(s)、そのモデルをPn(s)、出力をyとする。
y
P
i
d
=
ref−
n−1 (2.3.1) となるため、入力と制御対象の逆特性から外乱 d が計算で求められる。しかし、制御対象に 積分特性を含んでいる場合、位置の微分が必要となるためその実現は難しく、また、仮に可 能であったとしても、高周波でハイゲインとなるため観測ノイズの影響を非常に受けやすく なる。そこで次式に示しように d に低域通過フィルタを通して得られる出力dˆ
を推定値とす る。また、nはF×Pn -1 がプロパーになるように決定する。d
s
d
F
d
n i d)
1
(
1
ˆ
+
=
⋅
=
τ
(2.3.2) これを図示したのが図2.3.1(b)である。この点線で囲まれた部分は、制御対象への入力および 出力から外乱を推定するため、外乱オブザーバ(disturbance observer)と呼ばれる (6) 。このとき、 外乱オブザーバの極は式(2.3.2)のローパスフィルタの極に相当するため、フィルタの時定数を できるだけ小さくすることで遅れの少ない推定値を得ることができる。しかし、実際にあま りに小さくしすぎると、観測ノイズや制御対象のモデル化誤差などの影響を受け、正しい推 定が行えなくなるためその決定にトレードオフは避けられない。また、本手法では、図2.3.1(b) の等価ブロック図として図2.3.1(c)を用いる。 P Pn-1 iref y d + + − d − P Pn-1 iref y d + + − d − P y Pn-1 iref + d + − Fd dˆ − y P Pn-1 iref + d + − Fd dˆ − y P Pn-1 iref + d + − Fd dˆ − y P Pn-1 iref + d + − Fd dˆ − P Pn iref y d + + − Fd×P n-1 dˆ − P Pn iref y d + + − Fd×P n-1 dˆ − (a) (b) (c) 図2.3.1 外乱オブザーバのブロック図2.3.2
外乱オブザーバに基づく内部モデル制御系(DIMC)
DIMCの基本的なブロック図を図2.3.2に示す。同図からもわかるように、外乱オブザーバの 制御構成は、IMC に極めて類似しており、モデル化誤差および外乱が存在しない場合にはフィ ードバック補償が働かない。従って外乱オブザーバを有する内部モデルはオープン駆動型とい う特長を最大限発揮可能である。ここで、Fd(s)は外乱オブザーバ用フィルタであり、IMC フィ ルタと同一(F(s)=Fd(s))とする。すなわち、IMCに外乱オブザーバを導入しても、F(s)=Fd(s)とい う条件下では設計パラメータは増加せず、制御帯域幅を指定するだけでよい。制御器の離散化 においても、IMCおよび外乱オブザーバで同一のもの((s)F×Pn -1 (s)とPn(s))を用いればよく、コ ンピュータでの実現が容易である。 図2.3.2より、このシステムの入出力関係は次式となる。d
FPP
F
F
P
F
r
FPP
F
F
FPP
y
n n n 1 2 2 1 2 1)
2
(
)
1
(
)
1
(
)
2
(
)
1
(
− − −−
+
−
−
−
−
+
−
=
(2.3.3) 式(2.3.1)が外乱オブザーバ付き内部モデル制御系の目標値および外乱に対する伝達特性である。 ここでP(s)=Pn(s)のときd
s
P
s
F
r
s
F
y
=
(
)
⋅
−
(
1
−
(
))
2(
)
⋅
(2.3.4) となり、目標値rから出力yへの伝達特性はフィルタF(s)で表され、ステップ状の目標値に対す る定常偏差は零になる。また、外乱dから出力 yへの伝達特性では、フィルタF(s)の定常ゲイ ンであり、(1-F(s)) 2 は2つの微分特性を持つので、制御対象に積分特性が含まれていても外乱d から出力yへの伝達特性は 1つの微分特性が残る。したがって、ステップ外乱に対して定常偏 差は補償される。disturbance observer
F P
nP
P
n −−−− −−−−r
d
y
++++ ++++ ++++ ++++ −−−−1 .P
n −−−− ++++ −−−−F
d .P
n−−−−1 uf udu
yd yn ey eddisturbance observer
F P
nP
P
n −−−− −−−−r
d
y
++++ ++++ ++++ ++++ −−−−1 .P
n −−−− ++++ −−−−F
d .P
n−−−−1 uf udu
yd yn ey ed 図2.3.2 外乱オブザーバ付き内部モデル制御系これらより、DIMCのステップ指令に対するシミュレーション結果を図2.3.3に示す。シミュ
レーション条件は前節と同様である。ここで、外乱オブザーバ用のフィルタの帯域幅は、IMC
フィルタと同じ2π×80 rad/sとした。比較のため、IMC、IMC-PIDの応答も同時に示す。ここで
制御対象のモデルは前節と同様に式(2.2.2)とする。制御対象に積分特性を含む場合を考える。 このときP=Pnとし、0.1 sでステップ外乱を最大入力電圧の20%相当を印加した。 図2.3.4より、目標値応答はIMCと同様にフィルタ特性にのみ依存し、オーバーシュートがな い。また、IMCではステップ外乱に対して定常偏差が残っているのに対し、DIMCでは外乱によ る定常偏差補償が達成できている。またそのドロップ量に対してもIMCと比較しDIMCの方が 小さい。 図2.3.4に外乱応答に対するボード線図を示す。同図より外乱に対して一形の微分特性が達成 できていることが確認できる。 0 0.04 0.08 0.12 0.16 0.2 -0.01 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 IMC IMC-PID DIMC P o s it io n [ m m ] Time [s] 0 0.04 0.08 0.12 0.16 0.2 -0.01 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 -0.01 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 IMC IMC-PID DIMC IMC IMC-PID DIMC P o s it io n [ m m ] Time [s] -100 -90 -80 -70 -60 -50 -40 -30 G a in [ d B ] 100 101 102 103 104 Frequency [rad/sec] -100 -90 -80 -70 -60 -50 -40 -30 G a in [ d B ] -100 -90 -80 -70 -60 -50 -40 -30 G a in [ d B ] 100 101 102 103 104 Frequency [rad/sec] 100 101 102 103 104 Frequency [rad/sec] 図2.3.3 ステップ応答波形 図2.3.4 外乱応答特性 (IMC,IMC-PID,DIMCの比較) (IMC,IMC-PID,DIMCの比較)
2.3.3
任意の外乱に対する補償法
位置制御系においては制御対象に積分特性が一つ含まれる。このことを留意すると場合、図 2.3.2 のブロック図においてステップ外乱に対しては外乱補償を行えるが、ランプ外乱などの高 次の外乱に対しては、式(2.3.4)の外乱項にある(1-F(s)) 2 の微分成分がすべて打ち消され定常偏差 が残る。これを解決する手法について以下に述べる。一つには、外乱オブザーバの内部ループ数 を増やすことで補償可能である。また、ほかの方法としては外乱オブザーバのフィルタの次数を IMC-PIDの設計法のように高次元化する手法でも補償可能である。 (1) 内部内部内部 ループ内部ループループループ 数数数を数ををを 増増 やす増増やすやす 方法やす方法方法方法(DIMC type1型型型型) 図2.3.2のブロック図を図2.3.5のように等価変換する。IMCにおける入出力関係が
−
−
⋅
−
⋅
⋅
=
−r
y
d
F
P
F
P
y
n(
)
1
1 (2.3.5) であったのに対し、DIMCでは
−
−
⋅
−
−
⋅
−
⋅
⋅
=
− −y
d
F
P
F
y
r
F
P
F
P
y
n n)
1
(
)
(
)
1
(
1 2 1 (2.3.6) また、図2.3.5と図2.3.6を比較すると内部ループが一つ増えることで、ステップ外乱を補償でき た。このことを利用し、伝達関数が1/s n の外乱に対しては式(2.3.6)になるように調整すると図 2.3.7が得られる。
−
−
⋅
−
−
−
⋅
⋅
=
∑
= − + −d
y
F
P
F
y
r
F
P
F
P
y
n k k n n n 1 1 1 1)
1
(
)
(
)
1
(
[
]
{
F
P
r
F
d
}
F
P
P
F
P
n n n n n 1 1 1 1 1(
1
)
)
1
(
1
)
1
(
+ − + − ++
⋅
−
−
⋅
⋅
−
−
−
=
(2.3.7) しかし、内部ループが増えることで演算時間の増大やフィードバックループによるノイズ増幅 の問題から極力ループが少ないことが望ましい。位置制御系ではステップ外乱が支配的であるた め、内部ループを一つ含む図2.3.2の構造が最適である。−
+
P
y
d
+
−
−
+
F P
n −1(1
−
F )
2.
r
−
+
P
y
d
+
−
−
+
F P
n −1(1
−
F )
2.
F P
n−1(1
−
F )
2.
r
P
r
y
d
+
+
+
−
−
−
e
)
1
(
1F
P
F
n−
⋅
−P
r
y
d
+
+
+
−
−
−
e
)
1
(
1F
P
F
n−
⋅
−)
1
(
1F
P
F
n−
⋅
− 図2.3.6 IMCの等価ブロック図 + P r y d − + − − F Pn−1 (1−F )n . 1−
F F P. n−1 F Pn−1 (1−F )n+1 . + − + + P r y d − +− + − − F Pn−1 (1−F )n . F Pn−1 (1−F )n . 1−
F F P. n−1 1−
F F P. n−1 F Pn−1 (1−F )n+1 . F Pn−1 (1−F )n+1 . + − + 図2.3.7 DIMCのn次の外乱に対する補償法(2) 外乱外乱 オブザーバ外乱外乱オブザーバオブザーバ のオブザーバののの フィルタフィルタ をフィルタフィルタををを 調整調整調整調整 するするするする方法方法方法方法 外乱オブザーバのフィルタを調整することで外乱補償を行う方法について述べる。F≠Fdのと きの入出力関係は
r
PP
F
F
FPP
F
F
FPP
y
n d n d n 1 1 1)
1
(
)
1
)(
1
(
− − −−
+
+
−
−
=
d
PP
F
F
FPP
F
F
P
F
F
n d n d d 1 1)
1
(
)
1
)(
1
(
)
1
)(
1
(
− −+
−
+
−
−
−
−
−
(2.3.8) P=PnのときPd
F
F
Fr
y
=
−
(
1
−
)(
1
−
d)
(2.3.9) となる。つまり直列補償器に含まれるフィルタFは変更せず、外乱オブザーバのフィルタFdを 変更することで、目標値応答および外乱応答に対して定常偏差なく追従し、オーバーシュートも 発生しない。 例えば、外乱の伝達関数が1/s n であれば、フィルタ Fdは次のように調整することで定常偏差 なく目標値に追従することができる。 1)
1
(
1
)
1
(
++
+
+
=
n do do ds
s
n
F
τ
τ
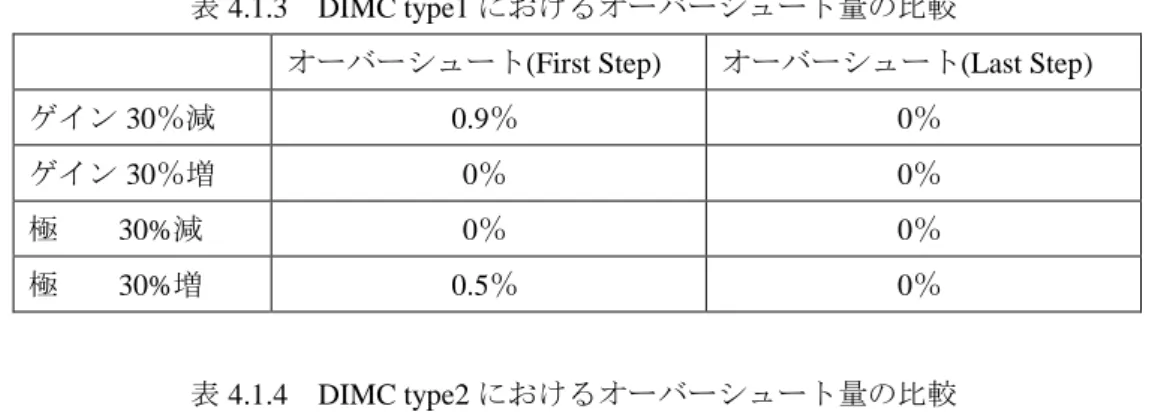
(2.3.10) (3) 上記上記 の上記上記ののの(1)とととと(2)の 結合ののの結合結合結合によるによるによるによる 方法方法方法方法(DIMC type2型型型型) 上記の(1)と(2)の方法を組み合わせることで制御系の最適化を行うことができる。いま、図2.3.6 のブロック図を図2.3.8に等価変換させ、フィードバック部分をさらに変形させることで図2.3.9 を得る。ここで、フィードバック部分を外乱オブザーバとみなすことができ、DIMCと同様の制 御性能をもつ制御系が得られる。さらに外乱オブザーバのフィルタを Fdとしたときの入出力関 係はd
PP
F
F
P
F
r
PP
F
F
FPP
y
n d d d n d d n 1 1 11
)
1
(
1
− − −+
−
−
+
+
−
=
(2.3.11) P=Pnのときd
P
F
r
F
y
=
⋅
+
(
1
−
d)
⋅
(2.3.12) さらにフィルタを 1)
1
(
1
)
1
(
++
+
+
=
n do do ds
s
n
F
τ
τ
(2.3.13)+
+
F
・
P
n−1P
−
−
d
y
r
1
−
F
1
F
・
P
n−1+
+
F
・
P
n−1P
−
−
d
y
r
1
−
F
1
1
−
F
1
F
・
P
n−1 図2.3.8 IMCの等価ブロック図+
+
−
F
d
・
P
n
−
1
P
n
P
−
+
−
y
d
r
disturbance observer
F
・
P
n
−
1
+
+
−
F
d
・
P
n
−
1
P
n
P
−
+
−
y
d
r
disturbance observer
F
・
P
n
−
1
図2.3.9 DIMC type2のブロック図図2.3.9のブロック図で示したDIMC type2の離散系のシミュレーション結果を図2.3.10に示 す。シミュレーション条件は前節と同様である。ここで、外乱に対して定常偏差が現れた。こ れは外乱オブザーバ出力部の代数ループを解消するためにユニットディレイを挿入したために 起こった。この代数ループの問題を解決するためにブロック図を等価変換して図 2.3.11のよう に変更する。そのときのステップ応答波形を図 2.3.12 に示す。これにより、代数ループは打ち 消され、外乱に対して定常偏差なく追従できたことが確認できた。同時にDIMC type1との性能 比較のため、応答波形を重ねて示す。シミュレーション条件は前節と同様とし、制御帯域を2π
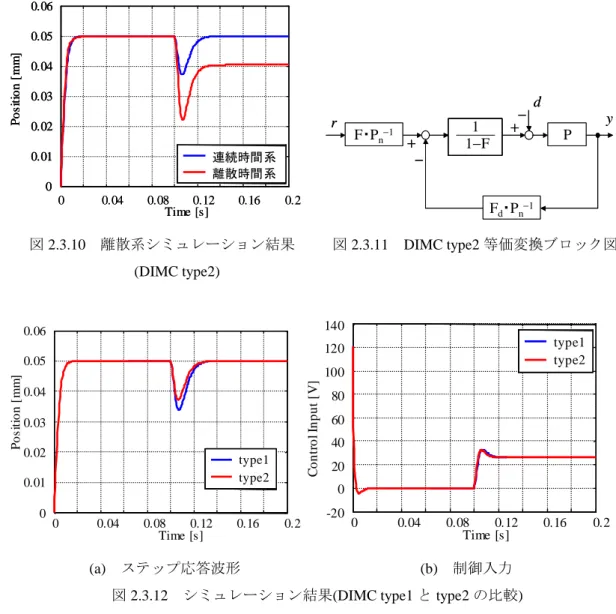
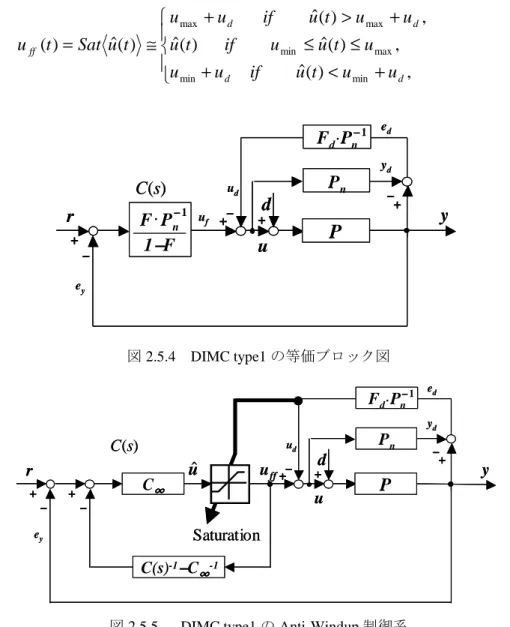
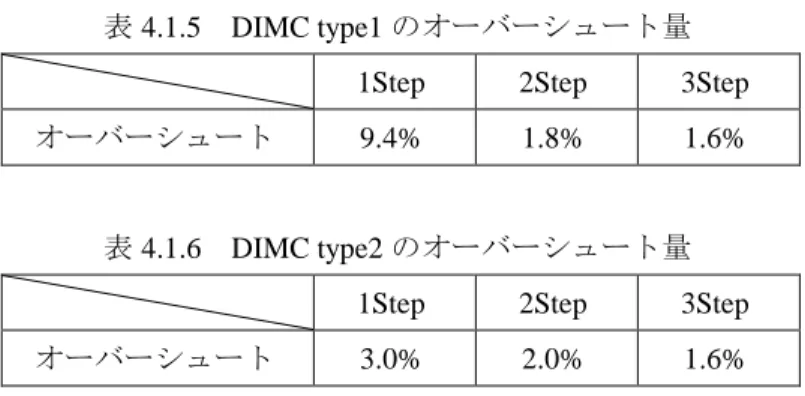
×80 rad/sとする。DIMC type1のブロック図は図2.3.2、DIMC type2のブロック図には図2.3.11
を用いた。type1と比較してtype2のほうが外乱に対してドロップ量が小さく、外乱からの復帰
も早いことが分かる。これは式(2.3.4) と式(2.3.12)の外乱応答の零点を比較したとき、DIMC
type2のほうがDIMC type1 よりも高帯域側に存在し、位相を進めるからである。
0 0.04 0.08 0.12 0.16 0.2 Time [s] 0 0.01 0.02 0.03 0.04 0.05 0.06 P o s it io n [ m m ] 連続時間 系 離散時間 系 0 0.04 0.08 0.12 0.16 0.2 Time [s] 0 0.01 0.02 0.03 0.04 0.05 0.06 P o s it io n [ m m ] 0 0.01 0.02 0.03 0.04 0.05 0.06 P o s it io n [ m m ] 連続時間 系 離散時間 系 連続時間 系 離散時間 系 + + Fd・Pn−1 P − − d y r 1−F 1 F・P n−1 + + Fd・Pn−1 P − − d y r 1−F 1 1−F 1 F・P n−1 図2.3.10 離散系シミュレーション結果 図2.3.11 DIMC type2等価変換ブロック図 (DIMC type2) 0 0.01 0.02 0.03 0.04 0.05 0.06 type1 type2 type1 type2 P o s it io n [ m m ] -20 0 20 40 60 80 100 120 140 type1 type2 type1 type2 C o n tr o l In p u t [V ]
2.4
2.4
2.4
2.4
制御器
制御器
制御器
制御器の
の
の
の離散
離散
離散
離散パラメータ
パラメータ
パラメータ
パラメータ
実システムをコンピュータで制御するためには、設計された制御器をディジタル計算機に実 装しなければならない。このためコントローラは最終的に離散時間系で記述する必要がある。 前節までは制御器を連続時間制御系で設計してきたが、離散化実現させる方法として tustin 法を用いる。いま制御器の連続時間状態方程式が次のように与えられたとする。)
(
)
(
)
(
)
(
)
(
)
(
t
u
D
t
X
C
y
y
t
u
B
t
X
A
t
X
c c c c⋅
+
⋅
=
⋅
+
⋅
=
&
(2.4.1) このとき次の変換公式を用いる。 c c s c c s d s c c s d c s c d s c s c dD
B
T
A
I
C
T
D
T
A
I
C
T
C
B
T
A
I
B
T
A
I
T
A
I
A
+
⋅
⋅
−
⋅
⋅
=
⋅
−
⋅
⋅
=
⋅
⋅
−
=
⋅
+
⋅
⋅
−
=
− − − − 1 1 1 1)
2
(
2
)
2
(
)
2
(
)
2
(
)
2
(
(2.4.2) これにより離散時間状態方程式は)
(
)
(
)
(
)
(
)
(
)
1
(
k
u
D
k
w
C
k
y
k
u
B
k
w
A
k
w
d d d d⋅
+
⋅
=
⋅
+
⋅
=
+
(2.4.3) となる。以下で制御器のパラメータを示す。(1) DIMC type1のの 離散のの離散離散 パラメータ離散パラメータパラメータパラメータ 制御対象の伝達関数が次のように与えられたとき
)
(
s
p
1s
k
P
+
=
(2.4.4) コントローラ内のパラメータは次のようになる。)
2
(
2
1
2
2
2
2
1
2
4
2
0
2
2
:
1 2 1 1 1 1 1 1Ts
p
kTs
Dd
Ts
p
Ts
kTs
Cd
Ts
p
Ts
Ts
p
Bd
Ts
p
Ts
Ts
p
Ts
p
Ad
P
n+
=
+
=
+
+
=
+
+
−
=
(2.4.5)(
)
(
1)
2 3 2 2 2 2 1 1 3 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 11
/
2
4
4
1
4
4
4
)
2
(
/
2
4
2
1
4
4
4
4
4
2
4
4
4
4
4
4
4
4
4
4
4
4
4
4
4
4
4
s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s nk
Ts
p
k
Ts
Ts
Ts
Dd
Ts
p
Ts
p
k
Ts
Ts
Ts
Cd
Ts
Ts
Ts
Ts
Ts
Bd
Ts
Ts
Ts
Ts
Ts
Ts
Ts
Ts
Ts
Ts
Ts
Ts
Ts
Ts
Ad
P
F
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
+
−
+
−
+
+
−
=
+
−
+
−
+
+
−
=
+
+
+
+
=
+
+
−
+
+
+
+
+
−
+
+
−
−
=
⋅
− (2.4.6)(2) DIMC type2のの 離散のの離散離散 パラメータ離散パラメータパラメータパラメータ 上記の制御対象のときのDIMC type2の離散パラメータは
(
)
(
1)
2 3 2 2 2 2 1 1 3 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 11
/
2
4
4
1
4
4
4
)
2
(
/
2
4
2
1
4
4
4
4
4
2
4
4
4
4
4
4
4
4
4
4
4
4
4
4
4
4
4
s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s nk
Ts
p
k
Ts
Ts
Ts
Dd
Ts
p
Ts
p
k
Ts
Ts
Ts
Cd
Ts
Ts
Ts
Ts
Ts
Bd
Ts
Ts
Ts
Ts
Ts
Ts
Ts
Ts
Ts
Ts
Ts
Ts
Ts
Ts
Ad
P
F
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
+
−
+
−
+
+
−
=
+
−
+
−
+
+
−
=
+
+
+
+
=
+
+
−
+
+
+
+
+
−
+
+
−
−
=
⋅
−:
1 −⋅
n dP
F
(2.4.7) ( ) ( ) ( ) 2 1 11 3 1 2 2 1 3 1 2 1 3 2 2 1 1 1 3 2 2 3 2 3 2 2 3 3 2 2 3 3 2 3 2 2 2 3 3 3 3 2 2 2 2 3 3 3 2 2 3 3 3 2 / 2 1 2 3 3 ) 3 8 ( 2 9 2 3 1 2 3 ) 6 )( 3 8 ( 4 2 3 / 9 2 3 8 1 6 12 8 8 2 2 1 6 12 8 8 3 2 1 2 2 3 1 2 3 1 2 2 1 2 2 3 2 1 2 2 3 1 2 2 3 3 2 1 2 2 3 1 6 12 8 8 do T do s do s do do do s do do s do s do do do s s do do s do s s do s do do s s s s s do s do do do do s do s do s do s s s do s do s do s do s s do s do s do s do s do s do s s s do s do do do k Cd Dd p T T p T p T T Ts p T T p T p k T T T T Cd T T T T T Bd T T T T T T T T T T T T T T T T T T T T Ad τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ τ + = + + + + − + − + + + + − − − + + − + + + − = + + + = + − + + − − − + − − − − − − + + + = (2.4.8)(
)
1
)
3
2
(
4
)
6
(
1
2
6
)
3
2
(
2
)
6
(
2
2
1
3
2
2
1
2
3
2
4
0
1
3
2
2
0
0
3
2
3
2
:
1
1
2 2 3 3 2 2 2+
+
+
=
+
+
+
=
+
=
+
+
+
−
=
−
s do do s do s do do s do s do do s do s s s s s do do s s s do do s do s do s do s do dT
T
T
Dd
T
T
T
T
T
Cd
T
T
T
Bd
T
T
T
T
T
T
T
Ad
F
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
τ
(2.4.9)2.5
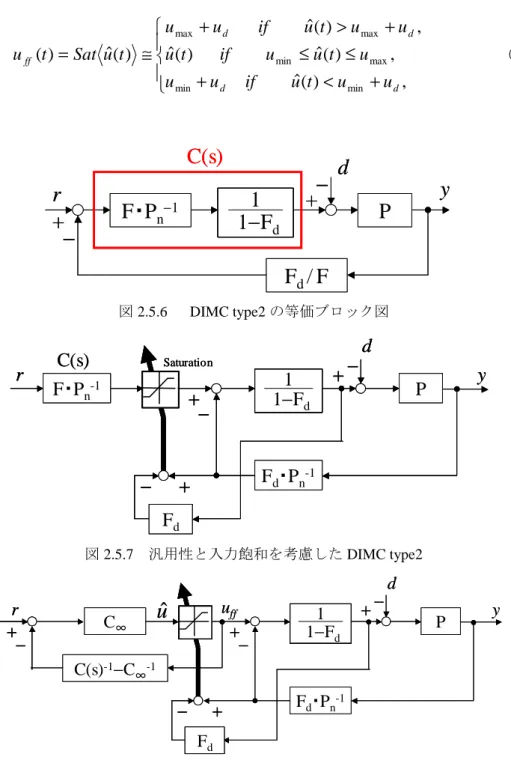
制御入力飽和
制御入力飽和
制御入力飽和
制御入力飽和に
に
に
に対
対
対
対 する
する
する
する
Anti----Windup
Anti
Anti
Anti
Windup
Windup
Windup
の
の
の
の検討
検討
検討
検討
現実のシステムでは操作量に対して飽和特性を持ち、制御入力飽和に対する制御性能劣化防止 が 実 装 で の 絶 対 条 件 と な る 。 こ の よ う な 操 作 量 飽 和 に よ る 制 御 性 能 の 劣 化 は ワ イ ン ド ア ッ プ (windup)現象と呼ばれる。Anti-Windup(AW)制御 (6) の目的は、たとえ制御入力の飽和が生じても、 制御系の安定性を維持し、良好な制御性能を達成する制御器を設計することである。 一般的にAW制御器は次の2段階設計の考え方に基づいて設計される。 Step1: 飽和非線形要素を無視した線形制御系に対して、与えられた制御仕様を満た す線形制御器C(s)を設計する。 Step2: 入力飽和による悪影響を低減するために新たに補償要素を C(s)に付加する。 あるいは制御系の構造を変更することにより、AW制御器Caw(s)を構成する。 ここで、AW制御器の簡単な例としてGoodwinの方法を紹介する。Step1で設計した線形制御器 C(s)とその定常ゲインC∞及び、それらの逆特性を用いて図2.5.2のように構成される。この系に おいて偏差eから制御入力uまでの伝達関数は
)
(
)
(
)
)
(
(
1
)
(
)
(
1 1 1C
s
C
s
C
C
C
C
s
C
C
s
E
s
U
=
⋅
=
−
+
=
∞ −∞ ∞ − ∞ −∞ (2.5.1) となり、制御性能は保証される。また、所望の入力をuˆ
(t)、実際の入力をu(t)とおくと、次のよ うに記述できる。
<
≤
≤
>
≅
=
,
)
(
ˆ
,
)
(
ˆ
)
(
ˆ
,
)
(
ˆ
)
(
ˆ
)
(
min min max min max maxu
t
u
if
u
u
t
u
u
if
t
u
u
t
u
if
u
t
u
Sat
t
u
(2.5.2)
C(s)
P
y
d
e
r
−
+
+ +
u
C(s)
P
y
d
e
r
−
+
+ +
u
図2.5.1 飽和非線形要素を無視した線形制御系C
∞P
y
d
e
−
+
+ +
u
r
−
+
C
∞P
y
d
e
−
+
+ +
u
r
−
+
ここで、GoodwinのAnti-Windup手法において、離散化法に注意しなければならない。離散化 実現に対し、直達項が現れるような双一次変換を用いた場合、応答性は劣化してしまう。そこで、 直達項が現れないような離散化方法を用いなければならない。一般的にはゼロ次ホールドが広く 用いられているが、さらなる応答性の改善の為、本論文では後退差分法を用いる。 図2.5.3のような連続系システムが与えられたとする。このときの状態方程式は