NAIST-IS-MT0851087
修士論文
アシスト方式の違いによる
電動自転車のエネルギー効率の改善について
畑田 和良
2010年 3 月 17 日 奈良先端科学技術大学院大学 情報科学研究科 情報システム学専攻本論文は奈良先端科学技術大学院大学情報科学研究科に 修士 (工学) 授与の要件として提出した修士論文である。 畑田 和良 審査委員: 杉本 謙二 教授 (主指導教員) 小笠原 司 教授 (副指導教員) 平田 健太郎 准教授 (副指導教員)
アシスト方式の違いによる
電動自転車のエネルギー効率の改善について
∗畑田 和良
内容梗概 近年, Ecological かつ Economical な乗り物である自転車の利用が見直され, 自 転車にパワーアシスト技術を応用した電動アシスト自転車の普及が進んでいる. 現在, 市販されている電動アシスト自転車には踏力比例制御と呼ばれる制御法が 用いられている. この手法は, ペダリング時の駆動トルクをモータが比例倍させ るので, 結果的に速度の脈動を増幅させることになる. 先行研究においては速度 の脈動を抑制し, エネルギー効率に優れたパワーアシスト法を実現するために踏 力の周期性に着目した繰返し制御法に基づくパワーアシスト法の検討, さらに, 駆 動トルクの周波数ゆらぎに対するロバスト化のために FIR フィルタ型繰返し制御 を用いたパワーアシストの検討を行ってきた. これらは, シミュレーションにお いては有効性が確認できたが, 人間のペダリングによって行ってきた実機実験で は周波数ゆらぎの影響を受け, 有効性の正確な検証が困難であった. 本論文では, 正確な実験が可能となるように, 新たにペダリングロボットを作成し, それを用い て先行研究の有効性の検証結果を報告する. キーワード 電動アシスト自転車, 周期運動, 繰返し制御, FIR フィルタ, 有限周波数KYP補題 ∗奈良先端科学技術大学院大学 情報科学研究科 情報システム学専攻 修士論文,NAIST-IS-Energy Efficiency of Power Assisting Control
Methods for Electric Bicycles
∗Kazuyoshi Hatada
Abstract
This paper considers energy efficiency of power assisting methods for electric bicycles. In recent years, by a surge to the environmental problem, the use of the bicycle which is an Ecological, Economical vehicle attracts attention again. The electric bicycles which applied power assist technology to a bicycle are spreading rapidly by such a background. Most commercial bikes are using proportional assist to human power. However, it is less efficient since the pulsation of the speed is amplified inevitably. Thus we proposed several methods based on repetitive control in our previous works. In this paper, we compare the energy efficiency of each method through experiments by using newly developed pedaling robot.
Keywords:
electric bicycle, periodic motion, repetitive control, FIR filter, generalized KYP lemma
∗Master’s Thesis, Department of Information Systems, Graduate School of Information
目 次
1. はじめに 1 1.1 研究背景 . . . . 1 1.2 研究目的 . . . . 2 1.3 本論文の構成 . . . . 3 2. 電動アシスト自転車について 4 2.1 電動アシスト自転車の概要 . . . . 4 2.2 電動アシスト自転車技術の動向 . . . . 6 3. 自転車のモデルとエネルギー効率 8 3.1 自転車駆動系のモデリング . . . . 8 3.2 速度計測機構 . . . . 9 3.3 システム同定 . . . . 10 3.4 走行時のエネルギー効率 . . . . 13 4. パワーアシスト方式 15 4.1 踏力比例制御 (PPC) . . . . 15 4.2 繰返し制御の応用によるパワーアシスト [13] . . . . 17 4.2.1 離散時間繰返し制御 [14] . . . . 17 4.2.2 繰返し制御を用いたパワーアシスト (MRC) . . . . 17 4.2.3 周波数ゆらぎの影響 . . . . 19 4.3 フィルタ型繰返し制御の応用によるパワーアシスト [17] . . . . 20 4.3.1 ディジタルフィルタ . . . . 20 4.3.2 FIRフィルタ型繰返し制御を用いたパワーアシスト (FIRRC) 22 5. 数値シミュレーション 27 5.1 制御系設計 . . . . 27 5.2 有効性の検証 . . . . 306. 検証実験 31 6.1 実験条件 . . . . 31 6.2 速度オブザーバ . . . . 32 6.3 ペダリングロボットの製作 . . . . 32 6.4 実験結果 . . . . 34 6.4.1 基礎実験 (クランク角と駆動トルクの同期を考慮しない場合) 34 6.4.2 入力駆動トルクとクランク角が同期した状態での実験 . . . 36 7. おわりに 40 8. 今後の課題 41 謝辞 42 参考文献 43 付録 46 A. 実験機器の仕様 46
図 目 次
1 クランク角と踏力の関係 . . . . 2 2 電動アシスト自転車 (チェーン駆動型) . . . . 5 3 電動アシスト自転車のアシスト機構 . . . . 5 4 電動アシスト自転車 (前輪駆動型) . . . . 6 5 自転車駆動系の模式図 . . . . 8 6 トレーニング用負荷装置 . . . . 9 7 トルク計測値 . . . . 11 8 後輪角速度の計測値および推定値 . . . . 11 9 速度パターン . . . . 13 10 踏力比例制御 . . . . 15 11 電動アシスト機構の模式図 . . . . 16 12 離散時間系の繰り返し補償器 . . . . 17 13 繰返し制御によるパワーアシストシステム . . . . 18 14 実測トルクの基準値からのスペクトル偏差 . . . . 19 15 FIRフィルタ . . . . 21 16 FIRフィルタ型繰返し補償器 . . . . 21 17 FIRフィルタ型繰返し制御によるパワーアシスト . . . . 22 18 KRC(z)の構造 . . . . 22 19 二手法の踏力から速度までのボード線図 . . . . 28 20 速度応答の偏差 (ω0=8.38[rad/sec]) . . . . 29 21 速度応答の偏差 (ω0=8.20[rad/sec]) . . . . 29 22 実験装置の構成 . . . . 31 23 ペダリングロボットの設計図 . . . . 33 24 ペダリングロボット . . . . 33 25 実測速度の偏差 (ω0 = 8.38[rad/sec]) . . . . 34 26 実測速度の偏差 (ω0 = 8.20[rad/sec]) . . . . 35 27 計測速度 . . . . 36 28 駆動力とアシスト力 (踏力比例制御) . . . . 3729 クランク角 (踏力比例制御) . . . . 37 30 駆動力とアシスト力 (FIR フィルタ型繰返し制御) . . . . 38 31 クランク角 (FIR フィルタ型繰返し制御) . . . . 38
表 目 次
1 周波数帯域と Ψ の関係 . . . . 25 2 実験機器の構成要素 . . . . 46 3 ペダリングロボット構成要素 . . . . 461.
はじめに
1.1
研究背景
近年, パワーアシスト技術を応用した人に優しい人間-機械システムが注目され ている. パワーアシストとは, 文字通り, 人間の力を, 機械がアシストする技術 [1] であり, 産業分野や医療・福祉分野への応用を中心に研究が行われている. 産業 分野では工場内における重量物の運搬作業, 振動を伴う作業の際の機械振動の抑 制などへの応用が挙げられ, 劣悪作業の作業環境を改善し, 労働者の安全の確保を 実現している. また, 医療分野では災害時に救助活動を行う消防隊員の負担を軽 減する救助支援型担架ロボット [2], 福祉分野では, パーキンソン病患者の振戦を 抑制する食事支援 [3], 下肢障害者の歩行リハビリテーション支援 [4] への応用が 挙げられ, 今後, 更なる高齢化が確実なわが国において, その応用範囲の拡大が期 待されている. 一方, 1990 年代以降, 自転車にパワーアシスト技術を応用した電動アシスト自 転車の需要が年々増加している. これは高齢者による利用だけでなく, 各メーカー によるデザインなどの工夫もあり, 若年層にも浸透しているからである. 電動ア シスト自転車を選択するにあたって, 一度の充電で可能な連続走行距離が長いこ とは使い勝手の面から重要な観点である. よって, 各メーカーは限られたバッテ リー容量の下, エネルギーを有効活用することで連続走行距離を延ばすべくアシ スト制御の研究を進めている. そもそも, 人が自転車をこぐという行動は道具を用いた周期運動の一例であり, この周期運動は二足歩行するロボットなどに関連し様々な研究が行われている [5][6]. 電動アシスト自転車のアシスト制御に関する研究は周期運動する対象物へ のパワーアシストということから, 社会的要求だけでなく学術的観点からも意味 のあることであると考えられる. 現在, 電動アシスト自転車に対しては, 走行状況 に応じたパワーアシスト法 [7] について研究がなされており, 今後もパワーアシス ト法の工夫によるエネルギーの有効活用が期待されている.1.2
研究目的
自転車はその構造上, ペダリング時に駆動トルクを印加しやすいことろと, そ うでないところがある. 図 1 は人間がペダリングをおこなっているときの踏力を 計測した実験結果 [8] を示したものである. 実線は人間の骨格, 矢印は各クランク 角における踏力の大きさを表している. クランク角 10 時方向前後で踏力が大き くなっていることがわかる. その結果, 微視的に見れば, 自転車は走行時に加減速 図 1 クランク角と踏力の関係 を繰返している. 現在, 市販の電動アシスト自転車には, 計測した踏力の瞬時値に 比例したトルクをモータによって発生させる踏力比例制御が使用されていること から, アシスト力が加わることで自転車の速度変化も大きくなる. 一般に, 自動車 の燃費向上には一定速度での走行が有効であるといわれているが, 前述の状況は これと逆の状況にあることから, 従来法ではエネルギーを余分に消費していると いえる. そこで, 先行研究では踏力の周期性に着目し, 繰返し制御によって速度の 脈動を抑制するパワーアシスト [15], FIR フィルタ型繰返し制御を用いることに よってペダリングの周波数ゆらぎに対してロバストなパワーアシスト [23] につい て検討した. 先行研究では実機実験の際に人間が自転車をこいでいたので, ペダリングの周期にばらつきがあり, 正確な有効性の検証が困難であった. 本研究で は, 実験によって定量的な評価が可能となるように, また, 一定条件での実験が可 能となるように新たにペダリングロボットを作成し, 先行研究の有効性の検証を 行うことを目的とする.
1.3
本論文の構成
本論文では, 第 2 章で電動アシスト自転車の歴史や構造, 最近の技術動向につい て述べる. 次に, 第 3 章で自転車駆動系のモデリングとシステム同定, 実機での速 度計測機構について延べ, ここでエネルギー効率について考察する. 第 4 章では 一般に電動アシスト自転車で用いられている踏力比例制御法, 先行研究である繰 返し制御手法, FIR フィルタ型繰返し制御法とその電動アシスト自転車への応用 について述べる. 第 5 章では各手法の数値シミュレーションを行いエネルギー効 率の面で先行研究の有効性を検証する. 第 6 章では実機によって各手法の有効性 を検証するために, 今回製作したペダリングロボットを用いた実験結果より実機 における先行研究の有効性を検証する. 最後に第 7, 8 章でまとめと今後の課題に ついて述べる.2.
電動アシスト自転車について
本章では, 研究対象である電動アシスト自転車の概要および技術動向について 述べる.2.1
電動アシスト自転車の概要
電動アシスト自転車は, 道路交通法上では駆動補助機付自転車と呼ばれ, 「人の 力を補うため原動機を用いる自転車」と定義される [9]. 電動アシスト自転車が国 内で初めて販売されたのは 1993 年で, ヤマハ発動機の PAS であった. 以後, 需要 は年々増加し, 2008 年には電動アシスト自転車の国内出荷台数が原動機付自転車 を超えるまでに至っている [10]. 以下では, 市販されている電動アシスト自転車に ついて述べる. 現在普及しているペダル駆動型の電動アシスト自転車を図 2 に示す. ペダル駆 動型は図 3 のように, モータをフロントギア後方に搭載し, チェーンを介して人力 をアシストする. 一方で, 特殊なタイプの電動アシスト自転車も存在する. その一 つに, フロントハブの内部にモータを搭載している前輪駆動型がある. ここで, 前 輪駆動型の電動アシスト自転車を図 4 に示す. 前輪駆動型は, ハブモータで前輪, 人力で後輪を駆動させるため二輪駆動となり, 砂利道などの悪条件でも安定した 走行が可能となる. 本研究で使用するのはペダル駆動型であり, 図 2 に示した車 両を実験に用いる.図 2 電動アシスト自転車 (チェーン駆動型)
図 4 電動アシスト自転車 (前輪駆動型)
2.2
電動アシスト自転車技術の動向
電動アシスト自転車に要求される性能として, 安全性, 快適性, 低価格などが挙 げられるが, 現状で最重要視されているのが一回の充電で可能となる連続走行距 離である. 各メーカーはこの性能を向上させるために, 車体の軽量化, バッテリの 改善, 回生ブレーキの導入, モータ制御方法の改良などの対策を行っている. 以下 では, 特に回生ブレーキとモータ制御方法について述べる. エネルギーの有効利用という観点で回生ブレーキの導入は有効な手段であると いえる. 回生ブレーキは電車, 自動車などに用いられている手法で, 通常, 移動体 の速度を減少させるためには抵抗による摩擦で運動エネルギーを熱エネルギーへ 変換しているが, 回生ブレーキでは減速時にモータを発電機として作動させるこ とで運動エネルギーを電気エネルギーへ変換することで発電を行い, 発電時の回 転抵抗を制動力として利用する方法である. 一例として, 電車ではブレーキをか けている車両から発生したエネルギーを架線を通してそのときに加速している車 両に供給することでエネルギーの有効活用を行っている [11]. 同様に, 電動アシス ト自転車では, 回生ブレーキによって得られた電気エネルギーをバッテリに蓄え ることでエネルギーの有効利用を実現している. また, 限られたバッテリ容量を有効に利用るため, アシストモータの制御方法 にも研究が行われている. 制御方法に関する規制の道路交通法 [12] によって補助率の最大値が 2 と定められており, 各メーカはこの規制の下で, 発進時や急な上り 坂では強力なアシスト, 下り坂ではアシストを行わず回生ブレーキによって充電, 平地ではその中間のアシストを行うなど, 補助率を変化させることでエネルギー を有効に利用し, 連続走行距離の延長を実現している.
3.
自転車のモデルとエネルギー効率
本章では, 自転車駆動系のモデリング, 速度計測機構, システム同定, そして自 転車の走行時のエネルギー効率について述べる.3.1
自転車駆動系のモデリング
本研究で使用する電動アシスト自転車の駆動系の模式図を図 5 に示す. 図 5 自転車駆動系の模式図 ここで, ペダル, ギヤ, チェーン, 後輪の合算した慣性モーメントを J, 粘性摩擦 抵抗を D, 後輪の半径を r とすると, 人間の踏力 τ [Nm] から自転車の速度 v[km/h] までの駆動モデルは, J ˙ω0+ Dω0 = τ, v = rω0 (1) となり, これをラプラス変換すると v(s) = r J s + Dτ (s) =: G(s)τ (s) (2) を得る. また, 本研究では実験機を屋内で固定した状態で使用する. ここでは, 後 輪にトレーニング用負荷機器を (MAG-500) を付加することで, 走行時の抵抗を再 現している (図 6).図 6 トレーニング用負荷装置
3.2
速度計測機構
自転車の速度の計測には, 一般にはホイールに磁石をつけてタイヤの回転数と タイヤ周長から速度を算出する方法が用いられている. しかし, これでは 1 サンプ ルデータを得る間にタイヤが 1 周するため, その間の速度を計測することは不可能 である. また, 実験機において速度をリアルタイムに計測する手段として, 後輪に 発電機を押し当て発電される電圧値と速度値の相関を利用する方法があるが, こ の方法では観測ノイズが多く計測精度であるとはいえない . そこで, 本研究では ロータリエンコーダを後輪軸に押し当てることで後輪の角度を計測し, オブザー バによって走行速度を推定した. 速度オブザーバとその設計に必要な自転車駆動 系のシステム同定については以降で述べる.3.3
システム同定
トルクセンサ, ロータリエンコーダから得られる入力トルク τ , 後輪角度 θ を用 いて, 自転車駆動モデルを同定する. なおここでのサンプリング周期 Tsは 0.01[sec] とする. トルクから角度までの伝達関数は G(s) = 1/J s + D/J =: b s(s + a) (3) である. G(s) の離散時間表現は, 零次ホールド等価変換を用いると G(z) = b(1− e −aTs)/a z− e−aTs Ts z− 1 =: β z + α Ts z− 1 (4) で表されるため, α, β を求める問題となり, となる. ここで入出力データ対を行列 で表現すると, θ(2)− θ(1) .. . θ(n)− θ(n − 1) = θ(0)− θ(1) Tsτ (0) .. . ... θ(n− 2) − θ(n − 1) Tsτ (n− 2) [ α β ] (5) が得られる. ここで, b = θ(2)− θ(1) .. . θ(n)− θ(n − 1) , A = θ(0)− θ(1) Tsτ (0) .. . ... θ(n− 2) − θ(n − 1) Tsτ (n− 2) , x = [ α β ] (6) とおくと, 最小二乗法を用いて評価関数∥b − Ax∥2を最小とする x を求めるため, 正規方程式 x = (ATA)−1ATbを解くことで駆動系のシステム G(z) = 0.070 z− 0.901 (7) を得た, そして, G(z) サンプリング周期 Tsで零次ホールドにより連続時間系に変 換することで G(s) = 7.393 s + 10.460 (8) が得られる.5 10 15 20 25 0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 time[sec] torq ue [N m] 図 7 トルク計測値 5 10 15 20 25 0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 time[sec] angul ar v eloc ity [r ad/se c] measured value estimated value 図 8 後輪角速度の計測値および推定値
ここで, システム同定時のトルク測定値を図 7 に示す. また, 後輪の角速度の計 測値および推定値を図 8 に示す. 図中の実線は後輪の角度をもとに算出した角速 度, 破線は同定システムの出力を表している.
3.4
走行時のエネルギー効率
ここでは, 自転車走行中のエネルギー損失は粘性摩擦に由来するものだけとみ なして, 速度に脈動がある場合, ない場合のエネルギー効率を具体的に計算する. time v elocity without pulsation with pulsation 0 図 9 速度パターン 速度 v と粘性摩擦抵抗 D を用いると, 仕事は摩擦力と速度の積で表されることか ら Dv2となる. 一定速度の場合 v = v 0(const)と, 脈動がある場合 v = v0+vasin ω0t について比較を行う (図 9). それぞれの速度パターンに対する仕事率 W は, W1 = 1 T ∫ T 0 Dv2dt = D T [v 2 0t]T0 = Dv02 (9)W2 = 1 T ∫ T 0 Dv2dt = D T ∫ T 0 (v0+ vasin ω0t)2dt = D T [ v02− 2v0va ω0 cos ω0t + 1 2v 2 at− v2 a 4ω0 sin 2ω0t ]T 0 = Dv02+1 2Dv 2 a+ 2v0va ω0 D(1− cos ω0T )− v2 a 4ω0 D sin 2ω0T (10) と計算される. ここで, 時間を加減速の 1 周期分 T = 2π/ω0とおくと, W1 = Dv02, W2 = Dv02+ (1/2)Dv2aとなる. この計算結果から加減速が大きいほど, 損失の仕 事率が大きいことがわかる. いま, 両者の平均速度は等しいので, 加減速を伴う走 行は一定速度の走行に比べて余分なエネルギーを使っているといえる. 具体例と して, va = v0の場合には一定速度での走行に比べ, 損失の仕事率が 33.3[%] 増加 する.
4.
パワーアシスト方式
本章では, 現在, 市販されている電動アシスト自転車に用いられている踏力比 例制御および, 先行研究で提案されている繰返し制御の応用による自転車パワー アシスト手法について述べる.4.1
踏力比例制御
(PPC)
この制御方式では, ペダル基部のトルクセンサによって踏力の瞬時値を計測し, その踏力に比例したアシストトルクをモータによって発生させる. 踏力比例制御 のブロック線図を図 10 に示す. 図からも明らかなように, これは典型的なフィー ドフォワード制御である. 図 10 踏力比例制御 次に, モータへの指令トルクの算出方法について述べる. ここで, 図 11 に示す ように, モータの出力軸トルクを E, 人間の踏力を F , クランクの長さを d, クラ ンク軸周りのギアの半径を r1, アシストモータのギアの半径を r2, クランク軸周 りのギアがチェーンを引く力を f1,アシストモータがチェーンを引く力を f2とす ると, f1 = F r1 (11) f2 = τ r (12)が成り立つ. アシスト比率を α とすると, f2 = αf1よりモーターの出力軸トルク E は, E = r2 r1 αF (13) で求められる. なお, 今回実験機として使用する電動アシスト自転車において, r1 = 0.175[m], r2 = 0.033[m]であることから, モータの出力軸トルクと人間の踏 力の関係は E =.. 0.2αF (14) となる. なお, 現在は道路交通法で最大アシスト比率は 2 と定められている. 図 11 電動アシスト機構の模式図
4.2
繰返し制御の応用によるパワーアシスト
[13]
ここでは, エネルギー効率の改善を目的とした, 速度の脈動を除去するような 制御方式について考える. 本節では, 離散時間繰返し制御の概説 [14] および, 先行 研究として行われた繰返し制御を用いたパワーアシストについて述べる. 4.2.1 離散時間繰返し制御 [14] ここでは離散時間系における繰返し制御系について述べる. 離散時間系で周期 Lの関数を発生させる繰返し補償器は, N サンプル遅れの信号をフィードバック することで実現され, 図 12 のよう表される. 図 12 離散時間系の繰り返し補償器 ここで, 目標入力の周期 L, サンプリング周期 Tsと遅れ段数 N との間には, L = N Tsという関係が成り立つ. 繰返し制御は内部モデル原理に基づいて周期関 数発生モデルを閉ループ内に配置することで, 周期目標入力に対する定常偏差の ない追従および, 外乱の除去を実現する. 4.2.2 繰返し制御を用いたパワーアシスト (MRC) ここでは, 繰返し制御が周期外乱除去を実現する制御手法であるという特徴に 着目する. すなわち, 人間の踏力を周期外乱とみなし, その脈動を除去するパワー アシスト法 [15] について考える. 人間の踏力を外乱とみなす本ケースにおいて, 踏力の影響を完全に除去すると いうことは, 進行方向と逆向きにもアシスト力が加わることになる. このような状況では自転車の速度は 0 になり走行は不可能である. そこで, 外乱の直流成分 には介入しないように, 繰返し補償器の直流成分に対応する極を取り除くことを 考える. ここではその補償器を修正繰返し補償器とよぶ. 遅れ段数が N である離散時間系繰返し補償器の伝達関数 F1(z)は F1(z) = 1 zN − 1 (15) である. ここで, 離散時間系において直流成分に対応する極 z = 1 を F1(z)から取 り除くと F2(z)は, F2(z) = z− 1 zN − 1 = 1 zN−1+ zN−2+· · · + z + 1 (16) となる. 先行研究により提案された繰返し型制御系の構成図を図 13 に示す. 人間が入力 した駆動トルクに応じて速度が決まるよう, 目標入力はない. また, 実車での制限 にあわせて, モータの逆トルクを発生させないようリミッタを挿入している. 図 13 繰返し制御によるパワーアシストシステム
4.2.3 周波数ゆらぎの影響 本節では修正繰返し補償器を用いたパワーアシストについて説明したが, 実機 実験においてこの手法では速度の脈動の除去は不可能である. 実際に, 人間が 8.38[rad/sec] を目標にペダリング行ったときの実測トルクの基 準値からのスペクトル偏差を図 14 に示す. この図から人間が自転車をこぐ場合の 周期は, 常に一定ではなく周波数ゆらぎが存在することがわかる. そもそも, 繰返 し制御は特定の周波数とその高調波の外乱除去の性能は高いが, 外乱の周波数が 特定の値から少しでも変化すると外乱除去性能が低下するという特徴があること から, 外乱の周期が一定でない場合には十分な性能が発揮できない. 0 ×104 angular velocity[rad/sec] powe r 0.5 1.0 1.5 -0.5 -1.0 -1.5 0.2 0.4 0.6 0.8 1.0 1.2 0 1.4 1.6 1.8 2.0 図 14 実測トルクの基準値からのスペクトル偏差
4.3
フィルタ型繰返し制御の応用によるパワーアシスト
[17]
前節で述べたように, 繰返し制御では周波数変動の影響によって性能の低下が おこる. 一方, 従来の時間遅延ブロックを FIR フィルタで置き換え, 自由度を広げ る方法が提案されている [18]. この方法では, 有限周波数 KYP 補題 [22] を適用す ることでノッチ帯域を直接指定し, かつ高次の重みを設定することなく急峻なノッ チ特性を実現している. 先行研究 [23] では, これをパワーアシストに適用した. 4.3.1 ディジタルフィルタ ディジタルフィルタは以下のアルゴリズムで表される二種類に大別される [19]. FIR : y(n) = N ∑ k=0 αku(n− k) (17) IIR : y(n) = N ∑ k=0 αku(n− k) + M ∑ j=1 βjy(n− j) (18) 式 (17) は継続時間が有限のインパルス応答を有することから FIR フィルタ (Finite Impulse Response Filter)とよばれる. 一方, 式 (18) は継続時間が無限のインパル ス応答を有することから IIR フィルタ (Infinite Impulse Response Filter) とよば れる. さらに式 (17) を z 変換すると, Y (z) = N ∑ k=0 αkz−kU (z) (19) となることから, 伝達関数は H(z) = Y (z) U (z) = N ∑ k=0 αkz−k (20) となる. 次に, FIR フィルタと繰返し補償器の関係について述べるにあたり, FIR フィル タ型繰返し補償器の構造を図 16 に示す.図 15 FIR フィルタ
FIRフィルタ型繰返し補償器において αk = 1とおくと離散時間繰返し補償器 と等価であることから, FIR フィルタ型繰返し補償器は繰返し補償器の構造を含 みながら, 係数 αkの決定によりそれ以上の自由度を持つことがわかる. 4.3.2 FIRフィルタ型繰返し制御を用いたパワーアシスト (FIRRC) FIRフィルタ型繰返し制御を用いた電動アシスト自転車のパワーアシストシス テムは図 17 のように与えられる. ここで, KRC(z)は繰返し制御器, Ko(z)は前置 制御器である. いま, KRC(z)は FIR フィルタ X(z) =∑Kk=κXkz−kと誤差追従制 御器 L(z) によって構成されている. また, 速応性改善のために KRC(z)にフィー ドフォワード項を追加している. 図 17 FIR フィルタ型繰返し制御によるパワーアシスト 図 18 KRC(z)の構造 次に, Ko(z), RKC(z) の設計について簡単に述べる. ここでは, 感度関数を
S(z)(= So(z)Ms(z)), KRC(z) = 0としたときの感度関数を So(z), 相補感度関 数 To(z)とする. なお詳細は [17] を参照されたい. 1 Ko(z)の設計 (閉ループ系の安定化) Ko(z)を選ぶ条件は, KRC(z) = 0としたときの感度関数を So(z)として, 閉ルー プ安定である必要がある. 次に, 低周波域で低ゲインとなるようにし, 直流成分 を除去しないようにする. そして, 高周波域でノイズの影響を受けないように, ∥ So(ejω0Ts)∥∞を小さくする. 2 L(z)の設計 (ペダリング周波数帯域以外の制御性能の設計)
FIRフィルタ X の決定が So(z)とは別に設計が出来るように To(z)を最小とす る Ko(z)を求め, L(z) = To(z)−1とおく. 3 X(z)の設計 (ペダリング周波数帯域での制御性能の設計) 以下の最適化問題を解き, フィルタの係数を求める. minimize γp,∆ subject to ∥ Ms(ejω0Ts)∥∞≤ ϵ, (21) | Ms(ejω0Ts)|≤ γp,∆, ωl ≤ ω0 ≤ ωh, (22) | X(ejω0Ts)|≤ ζ. (23) 上記の制約条件は順に, ペダリング周波数帯以外での性能, ペダリング周波数帯で の性能, 定常波成分の除去を防ぐことを意味している. このように有限周波数特 性をもつ設計問題に対して有限周波数 KYP 補題に基づく解法が提案されている [24].
有限周波数 KYP 補題 [24] 行列 A ∈ Cn×n, B ∈ Cn×m, C ∈ Cp×n, D ∈ Cp×m, Π∈ H n×nと (28) で定義される Λ(Φ, Ψ) が与えられ, det(λI−A) ̸= 0, ∀λ ∈ Λ が成立しているとする. このとき, σ(G(λ), Π) < 0, ∀λ ∈ Λ(Φ, Ψ) (24) が成立するための必要十分条件は, 以下の行列不等式を満たす P ∈ Hn, Q > 0∈ Hn が存在することである. [ A B I 0 ]∗ (Φ⊗ P + Ψ ⊗ Q) [ A B I 0 ] + Θ < 0 (25) ただし, Θ := [ C D I 0 ]∗ Π [ C D I 0 ] (26) ここで, Π は周波数特性を既定する 有界実性と正実性の条件は, 式 (27) のよう に定めればよい. Π = Πbr := [ Im 0 0 −γ2I m ] , Π = Πpr := [ 0 Im Im 0 ] (27) Φは連続時間系・離散時間系を定義する. 連続時間系・離散時間系に対して, Φc, Φdは Φc = [ 0 1 1 0 ] , Φd = [ 1 0 0 −1 ] (28) と定める. これは (24) を満たす. Ψは周波数帯域を設定する役割を果たす. 連続時間・離散時間における周波数 帯域と Ψ の関係を表 1 に示す.
表 1 周波数帯域と Ψ の関係 連続時間 Ω Ψ LF |ω0| ≤ ϖl [ 1 0 0 −ϖ2 l ] MF ϖ1 ≤ ω0 ≤ ϖ2 [ −1 jϖc −jϖc −ϖ1ϖ2 ] HF |ω0| ≥ ϖh [ −1 0 0 −ϖh2 ] ただし, ϖc := (ϖ1+ ϖ2)/2 離散時間 Θ Ψ LF |θ| ≤ ϑl [ 0 1 1 −2 cos ϑl ] MF ϑ1 ≤ θ ≤ ϑ2 [ 0 ejϑc e−jϑc −2 cos ϑ ] HF ϑh ≤ |θ| ≤ π [ 0 −1 −1 2 cos ϑh ] ただし, ϑc := (ϑ1+ ϑ2)/2, ϑ := (ϑ2− ϑ1)/2
行列不等式 (25) は変数に対して2次となり, 凸最適化問題として解くことがで きない. しかし, この行列不等式を変形することで, LMI 最適化問題に帰着できる クラスがあり, FIR 設計問題がこれにあたる. 式 (25) に Schur complement を適用 した式を以下に示す. Γ(P, Q, C, D) [ C D ]∗ S S∗ [ C D ] −R < 0 (29) ただし, Π11 = SR−1S∗:R > 0はフルランク分解 Γ(P, Q, C, D) := [ A B I 0 ]∗ (Φ⊗P +Ψ⊗Q) [ A B I 0 ] + [ 0 C∗Π12 Π∗12 D∗Π12+ Π∗12D + Π22 ] (30) である.
5.
数値シミュレーション
ここでは, 踏力比例制御, 修正繰返し制御 (図 13), FIR フィルタ型繰返し制御 (図 17) を用いたパワーアシストの数値シミュレーションをおこない有効性を検証 する.5.1
制御系設計
ここでは, 前述の修正繰返し制御および FIR フィル型繰返し制御の設計をおこ なう. なお, 同定実験から得られた自転車モデルの駆動系 G(z), モータの伝達関 数 F (z) は, G(z) = 0.078 z− 0.901 (31) F (z) = 2.56 (32) である. 数値シミュレーションをおこなうにあたって, 人間の踏力 d を d = d1sin ω0t + d0, (33) d1 = 1.4, d0 = 2 と与える. なお, サンプリング周期は Ts = 0.01[s]とする. 修正繰返し制御では, 遅れ段数 N = 75, 前置補償器を K(z) = 4.589z− 4.132 z− 0.905 (34) とする. 一方, FIR フィルタ型繰返し制御においては K = 40 とし, 前置き補償 器を K(z) = 3.33z − 3.33 z− 0.905 (35) とし, ωh = 8.98, ωl = 7.85の範囲で−26[dB] 以上の減衰が得られるようにした. 両手法の踏力から速度までの伝達関数のボード線図を図 19 に示す. ここで, 修正繰返し制御のボード線図のノッチの中心部の角速度 ω0は 8.38[rad/sec]-10 -20 -30 -40 -50 -60 -70 -80 10 9 8 7 angular velocity[rad/sec] gain[dB] MRC FIRRC 図 19 二手法の踏力から速度までのボード線図 ノッチの広帯域化を実現している. また, 踏力の角速度がノッチの中心部であ るときと, そこから変化させたときの両手法の時間応答の偏差を図 20, 21 に示 す. FIR フィルタ型繰返し制御は周波数がノッチの中心部から変化している場合 (ω0 = 8.20[rad/sec])にも, 速度の脈動を抑えていることがわかる.
170 171 172 173 174 175 176 177 178 179 180 time[sec] 0 1.0 -1.0 velocity deviati on[k m/h] 2.0 -2.0 -1.5 -0.5 1.5 0.5 PPC MRC FIRRC 図 20 速度応答の偏差 (ω0=8.38[rad/sec]) 170 171 172 173 174 175 176 177 178 179 180 time[sec] 0 1.0 -1.0 velocity deviati on[k m/h] 2.0 -2.0 -1.5 -0.5 1.5 0.5 PPC MRC FIRRC 図 21 速度応答の偏差 (ω0=8.20[rad/sec])
5.2
有効性の検証
エネルギー効率を評価するにあたって, 平均速度の違いを考慮するために次の 評価指数 E を定義する. E = 脈動ありの速度に対する損失 一定速度に対する損失 (36) なお, 分母分子の損失の計算にあたっては, 3.4 節と同様の積分によるものとする. 踏力 d の周波数を ω0 = 8.38[rad/sec]としたときのシミュレーション結果は図 20 の通りである. 踏力比例制御, 修正繰返し制御, FIR フィルタ型繰返し制御それぞ れの評価指数を EP P C, EM RC, EF IRRCとすると, シミュレーション結果に基づく 計算値は EP P C = 1.15, EM RC = 1.00, EF IRRC = 1.04 となる. 従来方式である EP P C を基準とすると, EM RC が 13.06[%], EF IRRC が 9.55[%]減少した. また, 踏力 d において ω0 = 8.20[rad/sec]としたときのシミュ レーション結果 (図 21) を同様に評価すると EP P C = 1.18, EM RC = 1.07, EF IRRC = 1.05 となった. 従来方式 EP P Cに対する改善比は EM RCが 9.41[%], EF IRRCが 10.71[%] となる. 踏力の周波数 ω0がボード線図のノッチの中心部から変化した場合, 修正 繰返し制御は性能が顕著に劣化するのに対し, FIR フィルタ型繰返し制御の性能 は維持されていることがわかる.6.
検証実験
ここでは, 前章で設計をおこなった制御系の実験をおこない, その有効性を述 べる.6.1
実験条件
前章で数値シミュレーションをおこなった 3 手法の有効性について実機実験に より検証する. 実験装置の構成を図 22 に示す. なお, 各機器の仕様は付録を参照 されたい.PC
controller
observer
motor
drive
torque
bicycle
encoder
USB-CON
図 22 実験装置の構成 ここでサンプリング周期 Tsは 0.01[sec] とした. 自転車の速度は後輪に取り付 けたロータリエンコーダの角度情報よりオブザーバを用いて推定した.6.2
速度オブザーバ
同定したモデルをもとに, ロータリエンコーダによって計測した後輪の角度か ら角速度を推定するオブザーバを設計した. 式 (1) を θ について書き表すと, ¨ θ =−D J ˙ θ + 1 Jτ (37) となる. 状態変数を x = [θ ˙θ]T とおくと, 自転車モデルの状態方程式と出力方程 式は以下のようになる. d dt [ θ ˙ θ ] = [ 0 1 0 −D/J ] [ θ ˙ θ ] + [ 0 1/J ] τ (38) y = [ 1 0] [θ ˙ θ ] (39) ここで, 各行列は以下のようになる. A = [ 0 1 0 −10.460 ] , B = [ 0 7.393 ] , C = [ 1 0 ] , D = 0 いまは (C, A) は可観測であるので, 極配置によって同一次元オブザーバを設計で きる.6.3
ペダリングロボットの製作
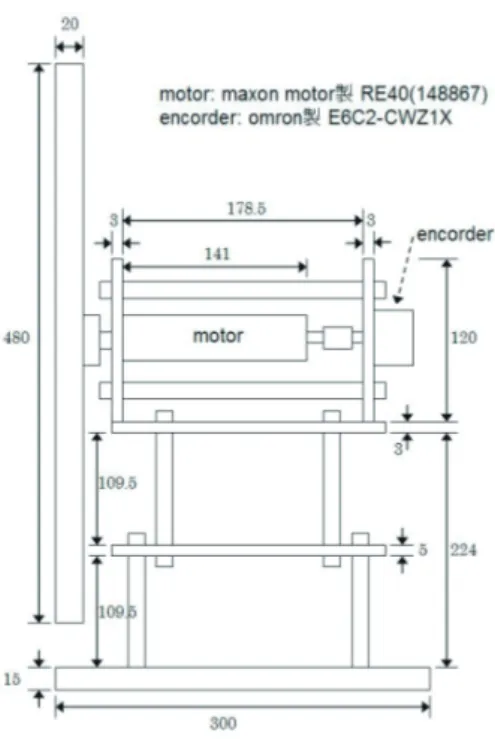
先行研究では人間が自転車をこいで検証実験をおこなっていた. しかし, 数値 シミュレーションで与えた条件は, 上り坂をゆっくりと登り続けることに相当す るため, 人間によって検証実験をおこなうことは困難である. そこで, 本研究では 各種条件の下での実験を可能とするためにペダリングロボットを製作した. ペダリングロボットの製作にあたっては, 特定の実験機以外での使用が可能と なるように自転車に完全には固定しないようにした. さらに, クランクを回転さ せるモータ軸に, ロータリーエンコーダを取り付けることでペダリングロボット のクランクの回転角を測定し, 同時に自転車のクランクの回転角も計測できるよ うにした. ペダリングロボットの設計図と完成後の写真を図 23, 24 に示す.図 23 ペダリングロボットの設計図
6.4
実験結果
ペダリングロッボットによって駆動トルクを与えておこなった実験の結果を述 べる. 6.4.1 基礎実験 (クランク角と駆動トルクの同期を考慮しない場合) まず, 式 (39) で与えられる踏力 d において d1 = 1.6, d0 = 2 とし, ω0 = 8.38, 8.20[rad/sec]に対する実験をおこなった. このときの実測速度の 偏差を図 25, 26 に示す. 170 171 172 173 174 175 176 177 178 179 180 0 1.0 1.2 0.8 0.6 0.4 0.2 -0.2 -0.4 -0.6 -0.8 -1.0 -1.2 time[sec] velocity deviati on[k m/h] PPC MRC FIRRC 図 25 実測速度の偏差 (ω0 = 8.38[rad/sec]) 図 25, 26 中で, 修正繰返し制御法はノッチの中心部では脈動の除去を実現して いるが, ノッチの中心から離れると著しく性能が低下している. それに対して FIR フィルタ型繰返し制御法ではどちらの周波数でも, ほぼ同等の性能を発揮してい170 171 172 173 174 175 176 177 178 179 180 0 1.0 1.2 0.8 0.6 0.4 0.2 -0.2 -0.4 -0.6 -0.8 -1.0 -1.2 time[sec] velocity deviati on[k m/h] PPC MRC FIRRC 図 26 実測速度の偏差 (ω0 = 8.20[rad/sec]) る. 次に, 従来方式と FIR フィルタ型繰返し制御の実験結果を評価する. まず, ω0 = 8.38[rad/sec]のとき, EP P C = 1.08, EM RC = 1.02, EF IRRC = 1.01 となり, 従来方式 EP P Cに対する改善比は EM RCが 5.93[%], EF IRRCが 6.39[%] と なった. 同様に, ω0 = 8.20[rad/sec]のときは EP P C = 1.08, EM RC = 1.07, EF IRRC = 1.03 となり, 従来方式 EP P Cに対する改善比は EM RCが 1.73[%], EF IRRCが 5.44[%] と なった. この結果より, 数値シミュレーションと同様に, FIR フィルタ型繰返し制 御法によるパワーアシストの駆動トルクの周期の変化に対するロバスト性が確認 できた. 上記の実験は駆動トルクを一定周期で印加することのみを想定している ので, 自転車のクランクが回転する周期と駆動トルクの周期が同一でないことか ら, 人間が自転車をこぐという現象とそぐわないということ, アシスト方式によっ て速度域が同一でないという問題がある.
6.4.2 入力駆動トルクとクランク角が同期した状態での実験 ここでは, 前述の問題を解決するためにペダリングロボットのモータ軸に取り 付けたロータリーエンコーダによって, 自転車のクランク角を計測し, クランク が一回転する周期と, 駆動トルクの周期が同一になるように式 (39) の d0を調整し た. 以下に, FIR フィルタ型繰返し制御によるパワーアシストと, 踏力比例制御に よるパワーアシストの実験結果を示す. 2 手法の計測速度を図 27 に示す. また, 踏 力比例制法のとき, ペダリングロボットが印加した駆動力の測定値とモータが印 加したアシスト力の指令値, 各時刻のクランク角を図 28, 29 に, 同様に, FIR フィ ルタ型繰返し制御法による場合を図 30, 31 に示す. なお, ω0 = 8.38[rad/sec]と し, クランクが半周 (180[o ])する間に1周期の正弦波状の駆動力を印加している. 図 30 より, FIR フィルタ型繰返し制御ではペダリングによる駆動力が小さくなっ ているときにそれを補うアシスト力が印加されていることがわかる. 170 171 172 173 174 175 176 177 178 179 180 time[sec] 7.0 8.0 7.5 6.5 6.0 5.5 velocity [km /h] PPC FIRRC 図 27 計測速度
drive assist force force 170 171 172 173 174 175 176 177 178 179 180 0 10 20 30 40 50 60 70 80 force [N] time[sec] 図 28 駆動力とアシスト力 (踏力比例制御) 170 171 172 173 174 175 176 177 178 179 180 time[sec] 0 20 40 60 80 100 120 140 160 180 200 pe d al angle[ ° ] 図 29 クランク角 (踏力比例制御)
170 171 172 173 174 175 176 177 178 179 180 0 10 20 30 40 50 60 70 80 time[sec] force [N] drive assist force force 図 30 駆動力とアシスト力 (FIR フィルタ型繰返し制御) 170 171 172 173 174 175 176 177 178 179 180 0 20 40 60 80 100 120 140 160 180 200 time[sec] pe d al angle[ ° ] 図 31 クランク角 (FIR フィルタ型繰返し制御)
ここで, 実験結果を前節と同様に評価すると,
EP P C = 1.09, EF IRRC = 1.01 となり, 従来方式 EP P Cに対する改善比は 7.77[%] となった.
7.
おわりに
本研究では, エネルギー効率の検証をおこなうためにペダリングロボットを作 成し, それを用いて先行研究の検証実験をおこなった. 先行研究では自転車のペダリングの周期性に着目し, 修正を施した繰返し制御 の電動アシスト自転車への適用と, 人間のペダリングに伴う周波数ゆらぎに対す るロバスト化のために FIR フィルタ型繰返し制御の電動アシスト自転車への適用 を検討した. これらは, 数値シミュレーション上では有効性が示されていたが, 実 機実験にあたっては人間がペダリングをおこなっていたので厳密な検証が困難で あった. そこで, 本研究では新たにペダリングロボットを製作し, 正確な周期による実験 をおこなった. 繰返し制御を用いた手法では, 目標とする周期に正確にペダリング をおこなえば駆動トルクの脈動を打ち消すようにアシストトルクが印加され, 速 度の脈動の除去に有効であるが, 目標とする周期から変化すると急激に性能が低 下することが確認できた. 一方, FIR フィルタを用いた手法では目標とする周期 から変化させても性能が維持されることが確認できた. そして, 現在市販の電動アシスト自転車に用いられている踏力比例制御による パワーアシストに比べ, FIR フィルタ型繰返し制御によるパワーアシストではエ ネルギー効率が 7.77[%] 改善された.8.
今後の課題
今後の課題として, 実用化を考えた場合の課題を述べる. 本研究では FIR フィルタ型繰返し制御の周波数ゆらぎに対するロバスト性を検 証するために, 二点の周波数において検証をおこなった. 今後は, 人間の運動に みられる非定常ゆらぎの解析 [28] に基づき, 連続的にペダリング周期が変化する 駆動トルクをモデル化し, より現実に沿った検証をおこなうことが望ましいと考 える. 次に, 先行研究並びに本研究は, トレーニング用装置を後輪に装着することで 路面抵抗を模擬している. この装置は後輪の回転軸部分で自転車を固定するので, 乗車している人間の重量は抵抗に反映されない. 今後, 実用化を考えた場合は乗 車する人間の重量による負荷も考慮する必要がある. また, 屋外での電動アシスト自転車の実走実験を考えると, まず, I/O ボードや 計算機といった電子機器の電源の確保が必要であると考えられる. さらに, 走行 に伴う振動による故障も考えられるのでそれらの対策も必要である.謝辞
本研究を進めるにあたり, 多大なるご指導およびご助言を頂いた奈良先端科学 技術大学院大学情報科学研究科応用システム科学講座の杉本謙二教授に深く感謝 致します. お忙しい中, 副指導教官になって頂き, 適切なご助言を頂きましたロボティクス 講座の小笠原司教授に厚くお礼申し上げます. 本研究全般においてご指導をして頂き, 数々の的確なアドバイスを頂きました 平田健太郎准教授に心より感謝致します. 研究へのアドバイスのみならず, 日々の楽しみ方までご指導頂いた小木曽公尚 助教に感謝致します. また, 定例研究会などで他分野からの貴重なご意見を頂い た橘拓至助教に感謝致します. 本研究にあたり, 駆動ユニット部の貸与, 技術情報の提供など多岐にわたり多大 なるご協力いただきましたパナソニックサイクルテック株式会社様に深く感謝致 します. 研究や学内生活のサポートをして頂いた林英子秘書ならびに前秘書の橋本洋子 さんに感謝致します. 研究を進めるにあたり, 疑問点などに快く回答して下さった元博士研究員 (現 東京農工大学助教) の中村幸紀さん, 博士後期課程の野口慎さんに感謝致します. 共に研究生活を送ってきた卒業されました先輩方, M1 のみなさん, そして同期 生のみなさんに感謝致します. 最後に, 大学院生活を支援してくれた家族に感謝します.参考文献
[1] 寺嶋, 大型連携プロジェクトによる作業支援のためのパワーアシスト研究の 成果と今後の展望, 第 10 回計測自動制御学会システムインテグレーション部 門講演会, pp. 311-314 (2009) [2] 岩野, 大須賀, 天野, 階段昇降機構を付加した救助支援型担架システムの開発 第 2 報 小型軽量化に向けての検討, 第 10 回計測自動制御学会システムイン テグレーション部門講演会, pp.1294-1295 (2009) [3] 矢野, 大原, 堀畑, 青木, 西本, 適応フィルタを用いた振戦抑制制御システム の開発と食事支援ロボットへの応用, 計測自動制御学会論文集, Vol. 45, No. 12, pp. 638-645 (2009) [4] 大貫, 矢野, 斉藤, 岩田, 過般型歩行感覚呈示装置を用いた歩行リハビリテー ション, 計測自動制御学会論文, Vol. 43, No. 3, pp. 189-196 (2007) [5] 平田, 小亀, 状態にジャンプを有する線形システムの周期運動 - Compass Walkingのモデリング, 安定解析, フィードバック制御, システム制御情報学 会論文誌, 17-12, pp. 553-560 (2004) [6] 平田健太郎, 受動歩行に内在する安定化機構について, 第 8 回 計測自動制御 学会 制御部門大会, (2008) [7] 薮下, 平田, 小菅, パワーアシスト自転車の走行抵抗可変型制御, 日本機械学 会論文集 (c 編) , 69, 680, pp. 195-200 (2003)[8] D. G. Wilson, Bicycling Science, 3rd Edition, The MIT Press (2004) [9] 道路交通法施行規則 第三十九条の三
[10] 朝日新聞, 2010 年 1 月 16 日, be on Saturday
[11] 秦, 鉄道車両の新技術, 電気情報通信学会誌, Vol. 90, No. 11, pp. 982-986 (2007)
[12] 道路交通局, 道路交通法施行規則の一部を改正する内閣府令案について (2008) [13] 大谷, エネルギー効率に優れた周期運動に対するパワーアシスト制御法, 2006 年度修士論文, 奈良先端科学技術大学院大学, (2007) [14] 中野, 井上, 山本, 原, 繰返し制御, 計測自動制御学会 (1988) [15] 大谷, 平田, 杉本, 繰り返し制御のパワーアシスト機構への応用, 第 7 回計測 自動制御学会システムインテグレーション部門講演会, pp. 854-855 (2006) [16] B.A.Francis and W.N.Wonham, The Internal Model Principle for Linear
Multivariable Regulators, Appl. Math. & Opt., 2-2, pp. 170-194(1975) [17] 山田, FIR フィルタ型繰返し制御を用いた周期運動に対するパワーアシスト,
2008年度修士論文, 奈良先端科学技術大学院大学, (2009)
[18] Goele Pipeleers, Generalized Repetitive Control: Better Performance with Less Memory, AMC’08, pp. 104-109 (2008)
[19] 近藤, 大橋, 実森, 計測・センサにおけるディジタル信号処理, 昭晃堂 (1993) [20] M.Steinbuch, Repetitive control for systems with uncertain period-time,
Au-tomatica, 38(12), pp. 2103-2109 (2002)
[21] M.Tomizuka, Zero phase error tracking algorithm for digital con-trol.Transactions of the ASME: Journal of Dynamic Systems, Measurement and Control, 109(1), pp. 65-68 (1987)
[22] T.Iwasaki and S.Hara, Generalized KYP lemma:Unified Characterization of Frequency Domain Inequalities with Applications to System Design (2003) ,Technical reports, (2003)
[23] 山田, 平田, FIR フィルタ型繰返し制御を用いた周期運動に対するパワーア シスト, SICE 関西支部若手研究発表会, pp.107-110 (2009)
[24] 原, 有限周波数 KYP 補題とその動的システムへの応用, 計測と制御, 45-8, pp. 534-539 (2005) ,Technical reports, (2003)
[25] Z. Liu and L. Vandenberghe, Low-rank structure in semidefiniteprograms derived from the kyp lemma, Reprint submitted to the 46th Conference on Decision and Control (2007)
[26] 原, 岩崎, 一般化KYP補題に基づくPID制御器の設計, システム/制御/情 報, 50-12, pp. 465-470 (2006)
[27] D.Siokata, S.Hara and T,Iwasaki, From Nyquist/Bode to GKYP design: De-sign algorithms with CACSD tools, SICE Annual Conference, pp. 1780-1785, (2004)
[28] 小林, 森田, 境田, 横山, 池浦, 増田, 母親が子供を抱いて揺する動作の周波数 解析, 第 10 回計測自動制御学会システムインテグレーション部門講演会, pp. 423-424 (2009)
付録
A.
実験機器の仕様
表 2 実験機器の構成要素 category spec
electric bike 24 in., DC brushless motor(240W) personal computer Win XP, 2.6 GHz, 1.99 GB mem.
encoder DC5V, 1000 pulse/rad I/O board digital controller U (USBA04)
software Matlab/Simulink R2006b
表 3 ペダリングロボット構成要素 category spec
motor DC brushed motor(150W) gear 1:43



![表 1 周波数帯域と Ψ の関係 連続時間 Ω Ψ LF |ω 0 | ≤ ϖ l [ 1 0 0 −ϖ l 2 ] MF ϖ 1 ≤ ω 0 ≤ ϖ 2 [ −1 jϖ c −jϖ c −ϖ 1 ϖ 2 ] HF |ω 0 | ≥ ϖ h [ −1 0 0 −ϖ h2 ] ただし, ϖ c := (ϖ 1 + ϖ 2 )/2 離散時間 Θ Ψ LF |θ| ≤ ϑ l [ 0 1 1 −2 cos ϑ l ] MF ϑ 1 ≤ θ ≤ ϑ 2 [ 0 e jϑ c e −jϑ c −2 cos ϑ ] H](https://thumb-ap.123doks.com/thumbv2/123deta/6468520.653137/33.892.255.630.362.874/Ψϖω≥ϖ−ϖただしΨϑ≤θ.webp)