台風前後に観測したUAVによる都市公園内の樹木の被災状況調査
11
0
0
全文
(2) 日本リモートセンシング学会誌. Vol. 41. No. 1 (2021). の四種類に分類されるが,これらの被害の発生要因として. る18)∼21)。NDVI によって,葉面積指数,植物生産量,バイ. は,一定の規模を超えた台風,立地条件に合わない樹種選. オマスなどの植生物理量を求める研究は数多くなされてお. 定,植栽基盤の整備不良,植栽施工の不良,維持管理の不. ,葉のクロロフィル吸収のピークは 450 nm 付近およ り22). 良があげられ,都市緑化を行う際には,これらの発生要因. び 650 nm 付近であることから,可視緑波長よりも可視赤. 。 を理解しておくことが求められている3). 。ま 波長における吸収が大きくなることが知られている23). リモートセンシングの分野においては,近年,UAV(Un-. た,近赤外波長よりも短い Red Edge を用いた Normalized. manned Aerial Vehicle)の利用が促進されており,植生域へ. 24) も提案され,Red Edge Difference Red edge Index(NDRE). 。丹羽7)は,台風前後に撮 の適用に関する研究も多い4)∼8). を用いた差分情報は,森林の植生分類に有効であることも. 影したデータを SfM(Structure from Motion)により処理す. 。 報告されている25). ることで得られる DSM を用いて風倒木ギャップを抽出し. 都市公園では,行政機関が台風通過後に臨時で公園内の. ている。また,Jonathan et al.8) は,UAV の multi-spectral. 被災状況を把握するために調査を実施したり,その被災状. camera(MSC)と airborne laser scanning(ALS)の LiDAR. 況をマッピングする場合26)もある。このような場合,飛. (Light Detection and Ranging)を併用し,針葉樹の調査に関. 行条件さえ整えば UAV は非常に有用なツールとなり得. する有効性を示している。LiDAR は,複雑な構造を持つ森. る。本研究では,千葉県習志野市にある都市公園をテスト. ,植生域に 林を測定するツールとして期待されてきたが9). サイトとして,LiDAR および MSC を搭載した大型 UAV. 10). に詳しくま. を用いた令和元年台風 15 号前後の観測を通じて,被災に. とめられている。例えば,樹高,樹冠の解析,また局所最. あった樹木の抽出とその被災状況の特徴について評価する. おける LiDAR の利用事例については佐々木. 11). 大値フィルタを用いて樹木の樹頂点を検出する手法. や,. ことを目的とした。. ,樹高,樹冠, 樹冠構造(針葉樹,広葉樹,混交林)の解析12) 材積の解析,Watershed 法などの領域分割法を用いた単木. 2. 研 究 手 法. ,単木レベルの樹高,材積の解析14) に の樹冠を抽出13) LiDAR は利用されている。一方,植生の生育状態を評価す. 本研究の解析対象地である都市公園は,周辺を市街地や. 15) をはじめ,Normalized Difるために,Simple Ratio(SR). 畑に囲まれている。Fig. 1 は,研究対象地の位置を示した. 16) 17) が広く利用されてい ference Vegetation Index(NDVI). ものであるが,図中の赤枠の範囲が UAV による観測の許可. Fig. 1. Location map of the study area (inside of the frame) and field survey points for RTK-GNSS surveying (Nos. 1-7).. ─ 3 ─.
(3) 台風前後に観測した UAV による都市公園内の樹木の被災状況調査. を得た領域となっている。公園の面積は約 20,000 m2 であ. 次節では,UAV に搭載した LiDAR(UAV-LiDAR と称す). り,公園内の樹木はほぼ広葉樹であり,うち約 6 割が落葉. および MSC(UAV-MSC と称す)の解析方法,さらに,台. 樹が占めるなど樹木の季節変化が顕著に表れる公園である。. 風前後に被災した樹木の空間的な特徴について考察する方. また,本研究では 2019 年 7 月 18 日および 2019 年 9 月. について記述する。. 12 日の正午頃に,LiDAR および MSC を搭載した UAV. 2. 1 UAV-LiDAR の処理. (Fig. 2)によって,対地高度 50 m 程度を 4 m/s 前後のスピー. Table 1 は,本研究で使用した UAV-LiDAR の諸元であ. ドで,マニュアル操作によって概ねオーバーラップ率とサ. る。この LiDAR は,16 個のレーザー送受信センサーの光. イドラップ率が 80 % 程度になるよう,研究対象地域を観. 発信部と受光部のヘッドユニットが水平方向に回転するこ. 測した。UAV をマニュアル操作にした理由は,都市公園. とで,ラインスキャンのように構成した 16 チャンネル数. 内を航行する上での安全性を担保するためであり,これに. 分の点群を生成することができる小型・軽量のイメージン. より,仮に公園内に人が立ち入った場合でも UAV をホバ. グユニットである。. リングさせる等により,危険を回避することができるため. 本研究で使用した UAV-LiDAR は,1 秒間に約 300,000. で あ る。Fig. 2 に 示 し た UAV は 900 mm × 900 mm × 480. ポイントの三次元座標である点群データを得ることができ. mm の形状で,各種センサーを含めた重量は約 8 kg であり,. るが,これらに正確な位置情報を付加させるためには前処. 飛行可能時間は約 15 分である。なお,2019 年 9 月 11 日に. 理が必要となるため,まず研究対象地から最寄りに位置す. は,台風通過後における公園内の様子を確認するため現地. る千葉県花見川区の電子基準点に記録された衛星測位シス. 踏査を行った。. テムによる位置情報をダウンロードし,UAV の軌道情報. LiDAR から作成する DSM および MSC から作成するオル. を補正した。これにより, 点群データの座標も補正される。. ソモザイクの幾何学的な精度を検証するため,2019 年 10. 次に,点群データからノイズを取り除くため,低密度点群. 月 7 日に現地調査を行い,RTK-GNSS(Real-Time Kinematic-. フィルタにより不要な点群を除去し,さらに目視判読によ. GNSS)測量によって研究対象地域内の不動点の地理座標. り明らかなノイズを手作業により除去した。最終に,前処. を取得した。Fig. 1 に示した No. 1∼No. 7 は RTK-GNSS 測. 理を施した点群データを利用し,空間分解能が 30 cm にな. 量を実施した地点であり,図中の写真は現地調査時のもの. る よ う に 空 間 内 挿 し て 数 値 表 層 モ デ ル(DSM:Digital. である。. Surface Model)を作成した。空間分解能を 30 cm に設定し た理由は,本研究で設定した UAV の観測条件から 30 cm2 あたり理論的に 10 点程度の観測が可能であったことから, できるだけ高分解能で且つ誤差の軽減を目指せると考えた からである。なお,作成した DSM の幾何学的な精度は, RTK-GNSS 測量によって得られた座標によって,三軸方向 の RMSE として評価することとした。 2. 2. UAV-MSC の処理. Table 2 は,本研究で使用した UAV-MSC の諸元である。 5 つの帯域に対して 1 秒間に 1 キャプチャー観測でき, 12bit RAW データが保存される。 本研究では,UAV の航行速度に合わせ,カメラトリガー は 2 秒間隔で撮影するタイマーモードを使用した。画像解 析では,UAV よって撮影された画像から SfM ソフトウェ. Table 1 Basic specifications of the LiDAR mounted on the UAV.. Fig. 2. Exterior of the UAV.. ─ 4 ─.
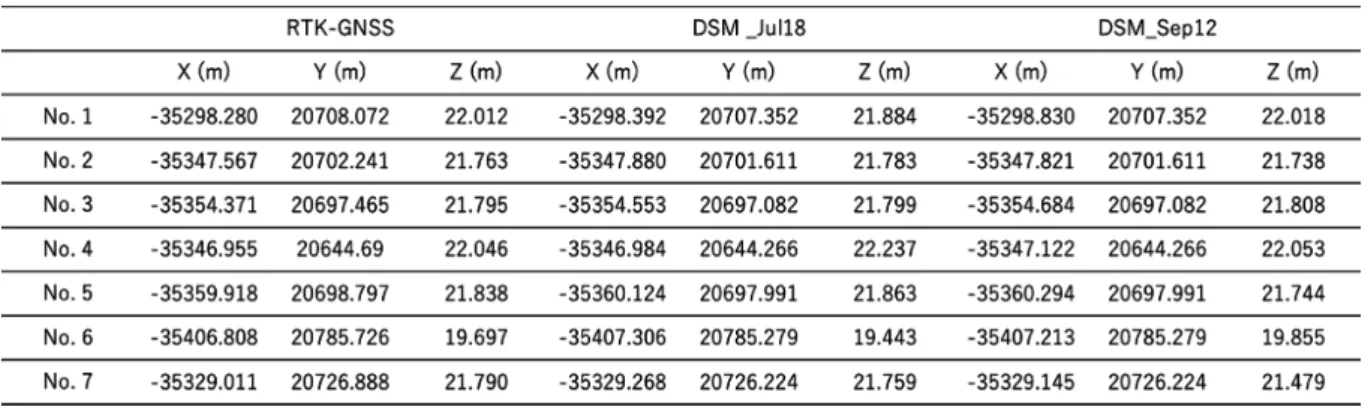
(4) 日本リモートセンシング学会誌. Table 2. Vol. 41. No. 1 (2021). Basic specifications of the multispectral camera mounted on the UAV.. アによってオルソモザイクを作成するが,反射率が予め測 定されている「Calibrated Reflectance Panel(CRP)」を観測 の前後に撮影することで,5 つの帯域の反射率画像に変換 した。また,RTK-GNSS 測量によって取得された不動点の 座標を GCP とし,SfM ソフトウェアによってオルソモザ イクを作成した。さらに,多時期に UAV によって観測し たデータから作成したオルソモザイク同士は,完全に重な. Fig. 3. DSM image from UAV-LiDAR data observed on July 18, 2019.. Fig. 4. DSM image from UAV-LiDAR observed on September 12, 2019.. り合うことは難しいため,GIS 上で全ての画像が一致する よう,アフィン変換によってオルソモザイクを幾何補正す ることとした。なお,オルソモザイクは,最終的に空間分 解能が 3.0 cm になるように,最近隣内挿法によって空間内 挿した。空間分解能を 3.0 cm に設定した理由は,オリジナ ルの空間分解能に近く,且つできるだけ地物の視覚判読を 可能とするためである。 2.3. 被災した樹木の評価方法. UAV-LiDAR か ら 得 ら れ る DSM は,数 値 標 高 モ デ ル (DEM:Digital Elevation Model)との差分を計算すると数値 地物モデル(DFM:Digital Feature Model)27)が得られる。 さらに,台風前後に得られた 2 つの DFM の差分(ΔDFM と称す)を計算すれば,被災した樹木の場所を特定するこ とが可能となる。また,ΔDFM 画像を作成して被災した樹 木の場所を特定し,その領域内において UAV-MSC から得 られるスペクトルを分析すれば,被災した樹木の状態を数 値化できる可能性がある。よって,本研究では十分な位置 精度が確認された ΔDFM 画像を作成して,研究対象地域 内における台風通過後の被災した場所を特定し,被災が確 認された関心領域において UAV-MSC のスペクトルを分 析して,被災した状態を定量的な数値として評価すること とした。 データだけでも,目視である程度の被災状況が予想できる 3. 結果と考察. と言える。 Table 3 は,RTK-GNSS 測量を実施した地点における,平. 3.1. 面直角座標(X・Y 座標)および標高(Z 座標)と,その同. UAV-LiDAR の解析と評価. Fig. 3 および Fig. 4 は,2019 年 7 月 18 日観測および. 一地点における DSM 画像から判読した座標を示したもの. 2019 年 9 月 12 日観測の UAV-LiDAR から作成した DSM. である。それぞれの座標を利用して RMSE を算出した結. 画像(それぞれ DSM_Jul18,DSM_Sep12 と称す)を,研究. 果,DSM_Jul18 は X 座標:0.268 m,Y 座標:0.601 m,Z 座. 対象地域で切り出したものである。両画像を比較すると,. 標:0.131 m であり,DSM_Sep12 は X 座標:0.342 m,Y 座. DSM_Sep12 の方が台風直後ということもあり,樹冠の凹. 標:0.413 m,Z 座標:0.137 m であった。よって,それぞれ. 凸が大きいことが判読できる。よって,UAV-LiDAR の. の DSM は三軸方向とも誤差が発生しており,誤差の値も. ─ 5 ─.
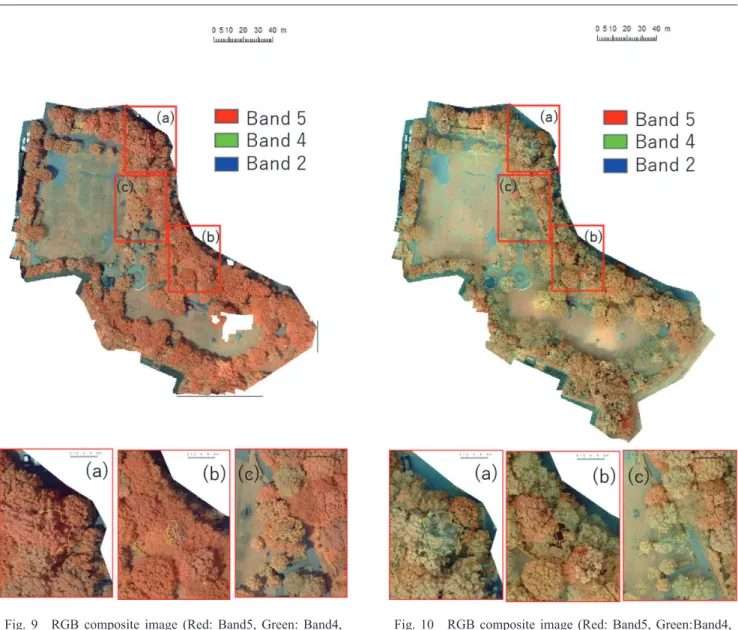
(5) 台風前後に観測した UAV による都市公園内の樹木の被災状況調査. Table 3. Geographical coordinate values (Japanese plane rectangular coordinate system) and elevation at RTK-GNSS surveying sites (Nos. 1-7).. RTK-GNSS 測量を実施した地点における標高を利用して RMSE を算出した結果,0.173 m であった。よって,5 m メッシュ DEM は,本研究の解析結果に対して大きな影響 を与えるものではないと判断した。Fig. 6 および Fig. 7 は, DSM_Jul18 および DSM_Sep12 と DEM の差分である DFM 画像(それぞれ DFM_Jul18,DFM_Sep12 と称す)である。 さらに,被災した樹木を抽出するため,DFM_Sep12 から DFM_Jul18 を差し引いた ΔDFM 画像を作成した。Fig. 8 は,ΔDFM 画像であるが,図中の凡例のとおり数値が−5 m 以下から−10 m 未満,および−10 以下を赤色の濃淡で 着色した。なお,背景画像には 2019 年 9 月 12 日観測のオ ル ソ モ ザ イ ク の RGB カ ラ ー 合 成 画 像(Band1:青 色, Band2:緑色,Band3:赤色)を使用した。これにより,着 色された部分は ΔDFM が大きなマイナスを示しているた め,幹折れなど,樹木に大きな被害があった場所だと推定 できる。 3. 2 Fig. 5. UAV-MSC の解析と評価. Fig. 9 および Fig. 10 は,2019 年 7 月 18 日観測および. DEM (5 m mesh) image published by Geospatial Information Authority of Japan.. 2019 年 9 月 12 日観測の UAV-MSC のオルソモザイク(そ れぞれ MSC_Jul18,MSC_Sep12 と称す)を,研究対象地域 で切り出したものである。それぞれのオルソモザイクは,. 一 定 値 で は な い た め 画 像 全 体 を 補 正 す る 必 要 が あ る。. 目視判読により X・Y 軸方向の誤差が認められたため,画. DSM 画像を目視で確認すると,画像は大きく歪むような. 像から判読できる建物などの不動点を GCP に利用し,ア. 状態ではなかったため,X・Y・Z 軸方向に RMSE の誤差だ. フィン変換によって GIS 上で RMSE 誤差が 1 ピクセル以. け DSM 画像をオフセットし,補正済み DSM の作成を試. 内になるよう位置合わせを行なった。図中のオルソモザイ. みたが,X・Y 軸方向については目視判読により誤差が残. クは,Band 2:青色,Band 4:緑色,Band 5:赤色の RGB カ. 存していた。したがって,画像から判読できる建物などの. ラー合成画像であるが,高分解能な画像であるため目視判. 不動点を GCP に利用し,最終的にはアフィン変換によっ. 読でもある程度の被災状況が考察できる。また,MSC_. て GIS 上で DSM の RMSE 誤差が 1 ピクセル以内になる. Jul18 の方が赤色の発色が若干強いため,MSC_Jul18 から. よう位置合わせを行なった。. MSC_Sep12 の時間経過にともなって,Band 5 の反射率が. Fig. 5 は,国土地理院が発行している 5 m メッシュ DEM. 低下していると考察できる。これは植生の生物季節変化の. を,研究対象地域で切り出したものである。この DEM を. 影響も考えられるが,台風の風雨や塩害などによって,葉. 利用し,補正済み DSM と DEM との差分である DFM を計. がダメージを受けたことも一因と思われる。なお,MSC_. 算することで地物のみの高さが把握できるため,これによ. Jul18 は 337 シーンのデータ,MSC_Sep12 は 333 シーンの. り樹木の高さを評価することとした。国土地理院の 5 m. データから生成されており,Fig. 9 の画像中に存在する白. メッシュ DEM は,日本国内では最も信頼できる高分解能. 色の領域は SfM ソフトウェアによって出力されたオルソ. な DEM であると思われる。なお,標高精度については,. モザイクの欠落部分である。. ─ 6 ─.
(6) 日本リモートセンシング学会誌. Fig. 7. Vol. 41. No. 1 (2021). Fig. 6. DFM image calculated from DSM_Jul18 and DEM.. DFM image calculated from DSM_Sep12 and DEM.. Fig. 8. Delta-DFM image subtracted DFM_Jul18 data from DFM_Sep12 data. Areas with Delta-DFM scored -10 or more but less than -5 are colored in light brown. Areas with Delta-DFM scored under -10 are colored in dark brown. (a), (b), (c) and (d) shows the field survey photo.. Fig. 8 の写真は現地踏査時のものであるが,図中の矢印. 場所である。一般的に,深根性のイチョウ,シラカシおよ. 方向に撮影している。Fig. 8(a)はイチョウが生育してい. びケヤキなどは防風用樹種として知られている28)。ここ. る場所であり,胸高直径:30 cm 程度のイチョウが倒木し. で,Fig. 8(a)において倒木が確認されたイチョウは,2018. ていることも確認できた。Fig. 8(b)は単木のケヤキであ. 年に研究対象地域における 276 本の樹木に対して実施した. るが,周辺のソメイヨシノ等の落枝が多数確認された場所. 1) 」に基づ 「都市公園の樹木の点検・診断に関する指針(案). である。また,Fig. 8(c)はニワウルシの幹折れが確認され. くの健全度調査29)において,樹幹の不自然な傾斜が確認. た場所であり,Fig. 8(d)はケヤキの枝折れが確認された. されるなど,健全度判定が「要注意」に判定されていたこ. ─ 7 ─.
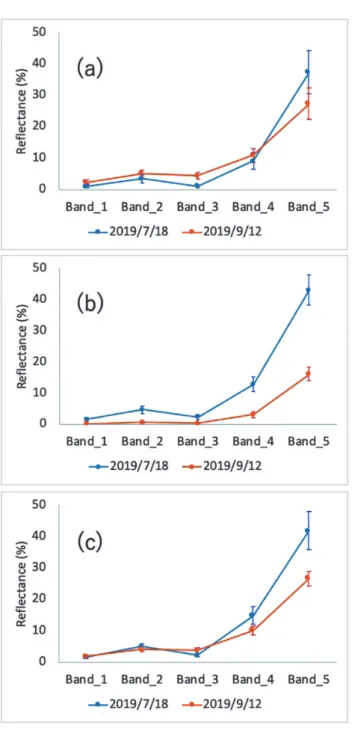
(7) 台風前後に観測した UAV による都市公園内の樹木の被災状況調査. Fig. 9. RGB composite image (Red: Band5, Green: Band4, Blue:Band2) observed on July 18, 2019. (a) The area of trees stripped their leaves after Typhoon Faxai. (b) The area of broken branches after Typhoon Faxai. (c) The area of broken tree after Typhoon Faxai. The yellow dash lines show the region of interest for spectral response analysis.. とがわかった。一方,Fig. 8(c)に示した幹折れが確認され. Fig. 10. RGB composite image (Red: Band5, Green:Band4, Blue:Band2) observed on September 12, 2019. (a) The area of trees stripped their leaves after Typhoon Faxai. (b) The area of broken branches after Typhoon Faxai. (c) The area of broken tree after Typhoon Faxai. The yellow dash lines show the region of interest for spectral response analysis.. 図も示したが, (a)は主に落葉が激しく枝が剥き出しの場. たニワウルシは,健全度判定では「健全に近い」に判定さ. 所(Fig. 8(a)付近), (b)は枝折れ等の被害が大きく周囲. れていた。なお,健全度判定は 23 項目におよぶ外観診断. の樹木の影響により大きな陰となってしまった場所(Fig.. の結果を総合的に判定し,4 段階(健全,健全に近い,要注. 8(b)付近) , (c)は幹折れが確認され下草が見える場所(Fig.. 意,危険木)に分類したものである。台風による倒木は,. 8(c)付近)である。そこで,Fig. 9 および Fig. 10(a), (b),. 風の通り道となる斜面に集中することが報告されてい 30). (c)の中に,被災が大きかった場所を関心領域(破線の範. る 。健全度調査から,研究対象地域として選定した公園. 囲)として設定し,MSC_Jul18 と MSC_Sep12 から得られ. の樹木は健全に近い樹木が多いことは把握していたが,現. (a) る,それらの領域の反射率を調べることとした。なお,. 地踏査では,この他にも無数の落葉,落枝,さらには傾木. の関心領域は数本のイチョウ,(b)の関心領域はカラスザ. も確認された。よって,これらの被害は樹種による違いと. ンショウおよびシラカシの一部,(c)の関心領域はニワウ. いうよりはむしろ,台風の局所的な風圧によって引き起こ. ルシの単木の領域である。Fig. 11(a) , (b), (c)は,関心. された可能性が高いと考えられる。. 領域内における各 Band の平均値をプロットし,標準偏差. 3.3. をエラーバーとして加えたグラフである。MSC_Jul18 と. 被災した樹木の評価. Fig. 9 および Fig. 10(a), (b), (c)の領域については拡大. MSC_Sep12 の反射率を比較すると,Band 5 の変化が最も. ─ 8 ─.
(8) 日本リモートセンシング学会誌. Vol. 41. No. 1 (2021). うに,Visible Red の反射率よりも Red Edge の反射率が小 さくなる可能性は少ないと思われる。一方,Fig. 11(a)お よび(c)で示されたように,落葉により枝が剥き出しの状 態や幹折れにより下草が見える状態の場合には,Visible Red の反射率は着葉している時期よりも大きくなる傾向が ある。また,Fig. 11(b)で示されたように,周辺の樹木の 影響により被災した場所が窪地の様になり大きな陰になっ てしまう場所は,林床などのスペクトルを観測している可 能性もあり,可視光域の反射率は非常に小さくなる。した がって,台風前後の Red Edge(Band4)と Visible Red(Band3). の差を比率にすれば,被災した樹木の特徴を数値化できる 可能性がある。 式(1)は,本研究で提案する式(Spatio-temporal Difference Ratio:SDR と称す)である。 SDR=ρRE_a−ρVR_a/ρRE_b−ρVR_b. . (1). SDR>1 excellent SDR=1 unchange SDR<1 poor. ここで,ρRE_a:事後に観測された Red Edge の反射率,. ρRE_b:事前に観測された Red Edge の反射率,ρVR_a:事後 に観測された Visible Red の反射率,ρVR_b:事前に観測さ れた Visible Red の反射率である。SDR の値は,植生に何 も変化がない場合には 1.0 になる。また,植生の状態が良 好になれば(Red Edge の反射率が大きくなり,Visible Red の反射率が小さくなれば)1.0 以上を示し,その逆の状態に なれば 1.0 以下となる。Fig. 11 に示した各 Band の反射率 の平均値を使って SDR をシミュレーションすると, (a) : 0.807, (b) :0.268, (c) :0.498 となり,樹木の繁茂していた 場所が陰のようになってしまう領域は特に値が低くなるこ とがわかった。よって,植生部分の被災状況を考えれば, 樹種により傾向は少し変わる可能性があるものの SDR に よって概ね 0 から 1.0 の範囲で被災状況が数値化できると Fig. 11. 思われる。. Spectral response characteristics of the region of interests before and after Typhoon Faxai. (a) The area of trees stripped their leaves after the typhoon. (b) The area of broken branches after the typhoon. (c) The area of broken tree after the typhoon.. Fig. 12 は,MSC_Jul18 および MSC_Sep12 を用いて計算 した SDR 画像である。SDR を計算した領域は,確実に樹 木の被災があったと思われる Fig. 8 に示した ΔDFM の値 が−5 m 以下の部分のみとした。これにより,樹冠の陰影 が与える SDR へのノイズ成分を抑制できると考えた。な お,背景画像には MSC_Jul18 のオルソモザイクの RGB カ. 大きく,次いで Band 4 の変化が大きいことがわかった。. ラー合成画像(Band1:青色,Band2:緑色,Band3:赤色). ここで,Band 5 においては Fig. 11(a), (b), (c)いずれ. を使用した。. も反射率が低下しているだけであるが,Band 4 においては. Fig. 12(a), (b), (c), (d)の領域については拡大図も示. Fig. 11(a)では MSC_Jul18 よりも MSC_Sep12 の反射率が. したが,ここで(a), (b), (c)の領域について,SDR の数. 高いものの,Fig. 11(b)および(c)では MSC_Sep12 の方. 値によって被災した状況を評価してみる。Fig. 12(a)と(c). が反射率は低い。また,Band3 においては Fig. 11(a)およ. を比較すると, (a)の SDR の数値は 0.7 前後であり, (c). び(c)では MSC_Jul18 よりも MSC_Sep12 の反射率が高い. の SDR の数値は 0.4 前後であった。また,Fig. 12(b)は. ものの,Fig. 11(b)では MSC_Sep12 の方が反射率は低い。. SDR の数値が 0.2 前後の数値が多く分布していたため,シ. よって,植生だけを考えれば,Fig. 11(b)でも示されたよ. ミュレーションした結果と近似していることが確認でき. ─ 9 ─.
(9) 台風前後に観測した UAV による都市公園内の樹木の被災状況調査. Fig. 12. SDR image calculated from MSC_Jul18 and MSC_Sep12. RGB composite image (Red: Band3, Green:Band2, Blue:Band1) observed on July 18, 2019 is set as a background.. た。なお,特に Fig. 12(b)の被災部分は少し歩道から奥に. 細な被災状況は現場で確認する必要があり,これはいまの. 入った場所に位置しており,UAV による観測の前日に行っ. ところ不変である。よって,本研究の成果は,災害発生時. た現地踏査では樹木の被災を見落としてしまった。よっ. の初期に行う状況把握などのニーズにおいて,有効な調査. て,UAV による調査を行うことで人的な調査では把握し. 手法の 1 つとなると結論づけられる。ユーザは例えば樹種. にくい場所も評価できるメリットも見出すことができた。. の特徴や被災の程度など,判読したい条件によって ΔDFM. Fig. 12(d)はオルソモザイクの欠損部分が含まれた領域の. の閾値を調整することもでき,MSC のオルソモザイクか. ため SDR 値は異常値として表れているが,Fig. 8(d)の写. らは他の解析も可能であるため,本研究で提案した手法は. 真よりケヤキの枝折れについては ΔDFM によって抽出で. 拡張性も高い。なお,UAV によって撮影した画像からオ. きたと考えられる。また,Fig. 12(d)に含まれる画像の歪. ルソモザイクを作成する際に生じる欠損部分については,. みより欠損が発生した理由が考察できるが,これは,2 秒. オーバーラップおよびサイドラップ率を上げる,または 2. 間隔に設定した UAV-MSC のカメラトリガーが UAV の旋. 回観測を行う等データ量を増やすことによって改善できる. 回中に作動してしまい,且つ,機体の安定性が不十分だっ. と思われる。今後は, 「都市公園の樹木の点検・診断に関す. たことに起因していると思われる。したがって,ΔDFM に. る指針案」の調査項目において,UAV がどのような貢献が. よって絞り込んだ領域において,UAV-MSC によって得ら. できるか検討する予定である。. れた画像から SDR を計算すると,被災している状態を数 謝. 値として評価できると思われる。. 辞:本研究は,習志野市公園緑地課のご協力により実. 施しました。また,本研究の遂行にあたり, (株)協和コン サルタンツの東北支社・森田義也 支社長,経営企画室・和. 4. お わ り に. 具良平 氏には,多大なご支援を賜りました。ここに記し 本研究は,大型 UAV に搭載した LiDAR および MSC か. て,感謝の意を表します。. ら得られたデータにより,都市公園を対象に,台風によっ て被災した樹木の抽出とその被災状況の特徴について評価. 引用文献. した。UAV の飛行条件さえ整えば,定期的に UAV の観測 を行なっておくことで災害時にいち早く被災場所を特定で きる。また,UAV は非常に高分解能な画像や動画の撮影 が可能であるため,人的な調査が難しい場合だけでなく時 間やコストの削減も実現できる。しかしながら,樹木の詳. 1)国土交通省:都市公園の樹木の点検・診断に関する指針 (案),国土交通省都市局公園緑地・景観課,pp. 1-14,2017. 2)千葉県:令和元年台風 15 号等への対応に関する検証(中 間報告),千葉県総務部行政改革推進課,pp. 1-19,2019.. ─ 10 ─.
(10) 日本リモートセンシング学会誌. 3)飯塚康雄,松江正彦,長濱庸介:沖縄における都市緑化樹 木の台風被害対策の手引き,国総研資料 第 621 号,2011. 4)Duan, F., Wan, Y., and Deng, L. : A Novel Approach for Coarseto-Fine Windthrown Tree Extraction Based on Unmanned Aerial Vehicle Images. Remote Sensing, 9 (4): 1-13, 2017. 5)濱 侃,田中 圭,望月 篤,新井弘幸,平田俊之,八幡 竜也,鶴岡康夫,近藤昭彦:UAV リモートセンシングお よび日射量を用いた水稲の草丈と収量の推定,水文・水資 源学会誌,Vol. 31,No. 2 ,pp. 68-82,2018. 6)井上吉雄:リモートセンシングのスマート農業への実装 に向けた研究開発の最前線─ SIP プログラムによるリ モートセンシングイニシアティブの活動概要─,日本リ モートセンシング学会誌,39 巻 5 号 pp. 414-420,2019. 7)丹羽英之:UAV により台風前後に撮影されたデータを用 いた風倒木ギャップの抽出,日本緑化工学会誌,44 巻 4 号 p. 591-595,2019. 8)Jonathan P. Dash, Michael S. Watt, Thomas S. H. Paul, Justin Morgenroth and Grant D. Pearse, Early Detection of Invasive Exotic Trees Using UAV and Manned Aircraft Multispectral and LiDAR Data, Remote Sensig, 11 (15), 1812; https : //doi. org/10.3390/rs11151812, pp. 1-21, 2019. 9)Lefsky, M. A., Cohen, W. B., Parker, G. G. and Harding, D. J. : Lidar remote sensing for ecosystem studies., BioScience 52, pp. 19-30, 2002. 10)佐々木剛:航空機 LiDAR を用いた森林構造の推定,景観 生態学 17(2) ,pp. 43-55,2012. 11)Persson, A., Holmgre, J. and Soderman, U. : Detecting and measureing individual trees using anairborne laser scanner., Photogrammetric Engineering and Remote Sensing 68, pp. 925-932, 2002. 12)Goetz, S., Steinberg, D., Dubayah, R. and Blair, B. : Laser remote sensing of canopy habitat heterogeneity as a predictor of bird species richness in an eastern temperate forest, USA. Remote Sensing of Environment 108: 254-263, 2007. 13)Heurich, M. : Automatic congnition and measurement of single trees based on data from airborne laser scanning over the richly structured natural forests of the Bavarian Forest National Park., Forest Ecology and Management, 255, pp. 2416-2433, 2008. 14)伊藤拓也,松英恵吾,内藤健司:航空機 LiDAR による森 林資源量推定─スギ・ヒノキの樹高・樹冠量による立木幹 材積推定式の検討─,写真測量とリモートセンシング,47 (1) ,pp. 26-35,2008. 15)Jordan, C. F. 1969. Derivation of leaf-area index from quality of light on the forest floor. Ecology 50: 663-666. doi: 10. 2307/ 1936256. 16)J. W. Rouse, R. H. Haas, J. A. Schell, D. W. Deering : Monitoring Vegetation Systems in the Great Plains with Erts, Third ERTS Symposium, NASA SP-351I, 309-317, 1973. 17)J. W. Rouse, R. H.Haas, J. A. Schell, D. W. Deering, and J. C. Harlan : Monitoring the vernal advancement and retrogradation (greenwave effect) of natural vegetation, NASA/GSFC Type III Final Report, Greenbelt, Md. 371, 1974. 18)Justice, C. O., Townshend, J. R. G., Holben, B. N., Tucker, C.. Vol. 41. No. 1 (2021). J. : Analysis of the phenology of global vegetation using meteorological satellite data. Int. J. Remote Sens. 6, pp. 1271-1318, 1985. 19)Jiarui Dong, Robert K. Kaufmann, Ranga B. Myneni, Compton J. Tucker, Pekka E. Kauppi, Jari Liski, Wolfgang Buermann, V. Alexeyev, Malcolm K. Hughes : Remote sensing estimates of boreal and temperate forest woody biomass: carbon pools, sources, and sinks, Remote Sensing of Environment 84, pp. 393-410, 2003. 20)Lunetta, R. S., Knight, J. F., Ediriwickrema, J., Lyon, J. G. and Worthy, L. D. : Land-cover change detection using multitemporal MODIS NDVI data. Remote sensing of environment 105 (2): 142-154, 2006. 21)Scott L. Powell, Warren B. Cohen, Sean P. Healey, Robert E. Kennedy, Gretchen G. Moisen, Kenneth B. Pierce, Janet L. Ohmann : Quantification of live aboveground forest biomass dynamics with Landsat time-series and field inventory data: A comparison of empirical modeling approaches, Remote Sensing of Environment 114, pp. 1053-1068, 2010. 22)本多嘉明・梶原康司:第 14 回 人工衛星データで得られる 植生指数とはどんなものですか? 衛星による植生観測に おける方向性反射の影響はどのようなものですか?,日本 リモートセンシング学会誌 Vol.32 No.2,pp. 101-104,2012. 23)宇都有昭・小杉幸夫・尾方俊成・小田川信哉:可視/近赤外 ハイパースペクトルデータに基づくナラ枯れ指標 NWI に 関する研究,写真測量とリモートセンシング,Vol. 49,No. 5,pp. 294-305,2010. 24)Barnes, E. M., Clarke, T. R., Richards, S. E., Colaizzi, P. D., Haberland, J., Kostrzewski, M., Waller, P., Choi, C., Riley, E., Thompson, T., Lascano, R. J., Li, H., and Moran, M. S. : Coincident detection of crop water stress, nitrogen status and canopy density using ground based multispectral data, International Journal of Applied Earth Observation and Geoinformation, Proceedings of the Fifth International Conference on Precision Agriculture, pp. 16-19, 2000. 25)後藤 誠 二朗・粟屋善雄:RapidEye 衛星の Red edge バ ンドを用いた森林タイプ分類の精度向上に関する検討: ─岐阜県御嵩町を例として─,システム農学,29(4),pp. 145-153,2013. 26)及川美奈:台風 24 号による倒木等被害の対応について, 国土交通省関東地方整備局令和元年度スキルアップセミ ナー関東,pp. 1-3,2019. 27)朝香智仁・青山定敬・岩下圭之・工藤勝輝・藤井壽生:小 型 UAV が観測した空中写真による海岸クロマツ林の樹 高推定,海岸林学会誌 9(2),pp. 91-96,2010. 28)飯島 亮・安蒜俊比古:庭木と緑化樹 1 針葉樹・常緑高 木,誠文堂新光社,1974. 29)古田尚輝・朝香智仁・岩下圭之・杉村俊郎・鈴木 良:都 市公園内における樹木の健全度評価に関する研究,令和 元年度土木学会全国大会第 74 回年次学術講演会,IV-100, 2019. 30)稲垣秀輝:植生の違いによる風倒木の発生と斜面崩壊,応 用地質 40(4),pp. 196-206,1999.. ─ 11 ─.
(11) 台風前後に観測した UAV による都市公園内の樹木の被災状況調査. 〔著者紹介〕 ●朝香. 智仁(アサカ トモヒト) 日本大学生産工学部土木工学科 准教授。 2007 年 3 月 日本大学大学院生産工学研 究科博士後期課程修了,博士(工学)。測 量士,無人航空機操縦技能・無人航空機安 全運航管理者。日本大学生産工学研究所 ハイテクリサーチセンター研究員を経て, 2008 年より現職。主に,リモートセンシ ングデータを利用した地形解析に関する研究に従事。2004 年 土木学会 全国大会優秀講演者賞,2015 年 日本リモートセン シング学会 論文奨励賞,2020 年 日本測量協会 応用測量論文 奨励賞を受賞。日本リモートセンシング学会,土木学会,日本 測量協会,地理空間情報推進協会,IEEE の会員。. ●中島. 英敬(ナカジマ ヒデタカ) (株)新星コンサルタント 専務取締役。 2002 年 日本大学生産工学部土木工学科 を卒業し,現職。2020 年より,(一社)地 理空間情報推進協会 理事。測量士,DJI CAMP インストラクター,国土交通省関 東地方整備局 ICT アドバイザー。公共測 量業務の傍ら,UAV に関する研究開発に 従事。2013 年 優秀技術者表彰(国土交通省利根川下流河川事 務所),2020 年優秀技術者表彰(国土交通省京浜河川事務所) を受賞。土木学会,日本測量協会,地理空間情報推進協会等の 会員。 ●野中. ●古田. 尚輝(フルタ ナオキ) (一財)リモート・センシング技術センター 研究員。2020 年 3 月 日本大学大学院生 産工学研究科博士前期課程修了,修士(工 学) 。無人航空機操縦技能・無人航空機安 全運航管理者。2020 年 4 月より現職。日 本リモートセンシング学会の会員。. ●鈴木. 良(スズキ. リョウ) 株式会社協和コンサルタンツ 東京支社 都市整備部 計画グループリーダー。1998 年 3 月 東京農業大学農学部造園学科卒業。 技術士(建設部門) ,登録ランドスケープ アーキテクト(RLA),一級造園施工管理 技士。一般社団法人ランドスケープアー キテクト連盟の会員。. 崇志(ノナカ タカシ) 所属:日本大学生産工学部環境安全工学 科。1999 年 早 稲 田 大 学 理 工 学 部 卒 業。 2001 年東京工業大学大学院総合理工学研 究科環境理工学創造専攻修士課程修了, 2004 年同大学大学院同研究科同専攻博士 課程修了,博士(工学)。株式会社パスコ を経て,2015 年より現職。高解像度合成 開口レーダの干渉解析による位相ノイズの評価や防災を中心 とした応用分野の研究開発等に従事。 所属学会:IEEE,土木学会,日本リモートセンシング学会,日 本写真測量学会,地球惑星科学連,日本赤外線学会。 ●杉村. 俊郎(スギムラ トシロウ) 日本大学生産工学部土木工学科 特任教 授。1977 年 武蔵工業大学工学部土木工 学科卒業。1995 年 博士(工学) (日本大 学)。(財)リモート・センシング技術セン ターを経て,2014 年 日本大学生産工学 部土木工学科 教授。リモートセンシン グ の 応 用 に 関 す る 研 究 に 従 事。日 本 リ モートセンシング学会,土木学会,日本写真測量学会の各会員。. ─ 12 ─.
(12)
図



+5


関連したドキュメント
We evalu- ated shear wave velovites of subsurface and accelerarion at surface by ground response analysis based on equivalent linear method at a site of borehole in Maizuru City,
When Misdetection radius was large, the ID length long, or the number of devices large, the Pair method was the best since it could reduces sequential blinking by adding bits
In the present study, we describe a CCD video-probe equipped with a contact-type objective lens and illuminator, and evaluated it as a compact capillaroscopy for
4 Case 2: Detection of human by vertical sensors from ceiling Through measurements and approximation of sensor characteristics, finally we got the relationships between
6 HUMAN DETECTION BY TILTED SENSORS FROM CEILING Based on previous studies, this paper presents an approach to detect human 2D position, body orientation and motion by using
In order to estimate the noise spectrum quickly and accurately, a detection method for a speech-absent frame and a speech-present frame by using a voice activity detector (VAD)
The object of this paper is to prove a selection theorem from which we derive a fixed point theorem that is different from the one due to Tarafdar [7] in that the compactness
Standard domino tableaux have already been considered by many authors [33], [6], [34], [8], [1], but, to the best of our knowledge, the expression of the
