クイックスタートガイド
MELSEC iQ-Rシリーズ シンプルモーションユニット
さぁ、はじめよう!
対応機種
-
RD77MS2
-
RD77MS4
-
RD77MS8
-
RD77MS16
RD77MSクイックスタートガイド
全上の
注意
( 使用前に必 お読み い)本製品の 使用に して ,本マニ ア および本マニ ア 紹介している関連マニ ア をよ お読
みいた と共に, 全に対して十分に注意を払って, しい 扱いをしていた ようお願いいたし
す。
本マニ ア 示す注意事項 ,本製品に関する ののみについて記載した の す。シーケンサシステ
としての 全上の 注意に関して ,使用するCPU ニットの ー ーズマニ ア を参照して
い。 の 全上の 注意 , 全注意事項の ン を 警告 , 注意 として区分してあ す。
警告
想定扱いを誤った場合に,危険る場合。 状況が起 えて,死亡 た 重傷を る 能性が注意
扱いを誤った場合に,危険 状況が起 えて,中程度の傷害や軽傷を る 能性が想定 る場合および物的損害 の 生が想定 る場合。
お, 注意に記載した事項 ,状況によって 重大 結果に結びつ 能性があ す。
い 重要 内容を記載してい すの 必 って い。
本マニ ア 必要 と に読めるよう大切に保管すると共に,必 最終 ー お届 いた よう
お願いいたし す。
[設計上の注意事項]
警告
● 外部電源の異常やシーケンサ本体の故 時 ,システ 全体が 全側に働 ようにシーケンサの外
部 全回路を設 て い。誤出力 た 誤動作によ ,事故の恐 があ す。
(1) 非常停 回路,保護回路, 転/ 逆転 の相反する動作のインタロッ 回路,位置決めの上限
/ 限 機 の破損防 のインタロッ 回路 ,シーケンサの外部 構成して い。
(2) シーケンサ 次の異常状態を検出すると,演算を停 し,出力 記の状態に す。
電源 ニットの過電流保護装置 た 過電圧保護装置が働いたと 全出力を OFF する。
CPU ニット ッチ ッ タイマ ー の自己診断機能 異常を検出したと ,パ
ータ設定によ ,全出力を保持 た OFF する。
(3) CPU ニット 検出 い入出力制御部分 の異常時 ,全出力がONする とがあ す。
のと ,機 の動作が 全側に働 よう,シーケンサの外部 フ ー セーフ回路を構成した ,
全機構を設 た して い。フ ー セーフ回路例について ,使用するCPU ニットの
ー ーズマニ ア を参照して い。
(4) 出力回路の ーやト ン スタ の故 によって ,出力がONの状態やOFFの状態を保持する
とがあ す。重大 事故につ がるよう 出力信号について ,外部 視する回路を設
て い。
● 出力回路において,定格 上の負荷電流 た 負荷短絡 による過電流が長時間 続して流 た場
合, 煙や 火の恐 があ すの ,外部に ーズ の 全回路を設 て い。
● シーケンサ本体の電源立上げ後に,外部供給電源を投入するように回路を構成して い。外部供
給電源を に立 上げると,誤出力 た 誤動作によ ,事故の恐 があ す。
● ットワー が交信異常に ったと の各局の動作状態について ,各 ットワー のマニ ア を
要
2
RD77MSクイックスタートガイド
警告
● CPU ニット た インテ ント機能 ニットに外部機器を接続して,運転中のシーケンサに対
する制御( ータ変更) を行うと ,常にシステ 全体が 全側に働 ように,プロ 上 イ
ンタロッ 回路を構成して い。 た,運転中のシーケンサに対するその の制御(プロ
変更,パ ータ変更,強制出力,運転状態変更(状態制御)) を行うと ,マニ ア を熟読し,
十分に 全を確認して 行って い。確認を怠ると,操作 スによ 機 の破損や事故の原因
に す。
● 外部機器 遠隔地のシーケンサに対する制御 , ータ交信異常によ シーケンサ側のト
にす に対応 い場合があ す。プロ 上 インタロッ 回路を構成すると共に, ータ
交信異常が 生したと のシステ としての処置方法を外部機器と CPU ニット間 決めて
い。
● ニットの ッフ の中 ,システ ア た 書込み不 の アに ータを書 込
い い。 た,CPU ニット 各 ニットに対する出力信号の中 ,使用禁 の信号を出
力(ON)し い い。システ ア た 書込み不 の アに対する ータの書込み,使用
禁 の信号に対する出力を行うと,シーケンサシステ が誤動作する危険性があ す。システ
ア た 書込み不 の ア,使用禁 の信号について ,各 ニットの ー ーズマニ ア を
参照して い。
● 通信ケー が断線した場合 ,回線が不 定に ,複数の局 ットワー が交信異常に る場
合があ す。交信異常が 生して ,システ が 全側に働 ようにプロ 上 インタロッ
回路を構成して い。誤出力 た 誤動作によ ,事故の恐 があ す。
● ットワー 経由の外部機器 の不 ア セスに対して,シーケンサシステ の 全を保つ必要が
あると , ー による対策を盛 込 い。 た,インター ット経由の外部機器 の
不 ア セスに対して,シーケンサシステ の 全を保つ必要があると ,フ イア ー
の対策を盛 込 い。
● 外部電源の異常やシーケンサ本体の故 時 ,システ 全体が 全側に働 ようにシーケンサの外
部 全回路を設 て い。誤出力 た 誤動作によ ,事故の恐 があ す。
(1) 機 原点復帰制御 ,原点復帰方向と原点復帰速度の2つの ータによって制御 ,近点 ON
にて減速を開始し す。したがって,原点復帰方向を誤って設定すると減速 に運転し続 る
場合があるの ,機 破損防 のインタロッ 回路をシーケンサの外部 構成して い。
(2) ニットが ー検出時,パ ータの停 ープの設定によ ,通常の減速停 た 急停
を行い す。パ ータ ,位置決めシステ の仕様に合わ て い。 た原点復帰用パ
ータおよび位置決め ータ パ ータの設定値 内にして い。
(3) ニット 検出 い出力回路の絶縁素子やト ン スタ の部品の故 によって ,出力
がONの状態やOFFの状態を保持する, た 不定に る とがあ す。重大 事故につ がるよ
う システ において ,出力信号を 視する回路を設 て い。
● ニット,サーボアンプ,サーボ ータを使用したシステ としての 全基準(たとえ ロボット
の 全通則 )のある の 全基準を満足 て い。
● ニット,サーボアンプの異常時動作とシステ としての 全方向動作が異 る場合 ニット
サーボアンプの外部 対策回路を構成して い。
● マ チ CPU システ やサーボアンプの制御電源が投入 ていると に,SSCNETⅢケー を
い い。 ニットやサーボアンプの SSCNETⅢコ タおよび SSCNETⅢケー の 端
る を直視し い い。 が目に入ると,目に違和感を感 る恐 があ す。
RD77MSクイックスタートガイド
[設計上の注意事項]
注意
● 制御線や通信ケー ,主回路や動力線と束線した ,近接 た し い い。100mm
上を目 として離して い。ノイズによ ,誤動作の原因に す。
● ンプ負荷, ータ,ソ ノイ の誘導性負荷を制御すると ,出力の OFF ON 時に
大 電流(通常の 10 倍程度)が流 る場合があ すの ,定格電流に余裕のある ニットをお使
い い。
● CPU ニットの電源 OFF ON た セット時,CPU ニットが RUN 状態に る の時間が,シス
テ 構成,パ ータ設定,プロ 容量 によ 変動し す。RUN 状態に る の時間が
変動して ,システ 全体が 全側に働 ように設計して い。
● 各種設定を登録中に, ニット装着局の電源 OFF および CPU ニットの セットを行わ い
い。登録中に ニット装着局の電源 OFF および CPU ニットの セットを行うと,フ ッシ
ROM 内の ータ内容が不定と , ッフ への設定値の再設定,フ ッシ ROM への再登
録が必要 す。 た, ニットの故 や誤動作の原因に す。
● CPU ニットのパ ータを変更したと ,必 CPU ニットを セットして い。 ニッ
トに変更前の ータが残る とによ ,誤動作の原因に す。
● 外部機器 CPU ニットに対する運転状態変更( ートRUN/STOP )を行うと , ニットパ
ータの" ープン方法の設定"を,"プロ OPEN し い"に設定して い。" ープン方
法の設定"が"プロ OPENする"に設定 ている場合 ,外部機器 ートSTOPを実行す
ると通信回線が ローズ す。 後 CPU ニット側 再 ープンが ,外部機器
の ートRUN 実行 す。
[
付
上の注意事項]
警告
● ニットの着脱 ,必 システ 使用している外部供給電源を全相遮断して 行って い。
要
4
RD77MSクイックスタートガイド
[
付
上の注意事項]
注意
● シーケンサ , 全にお使いいた ために(ベース ニットに同 のマニ ア )記載の一般仕様
の環境 使用して い。一般仕様の範囲 外の環境 使用すると,感電,火災,誤動作,製品
の損傷 た 劣化の原因に す。
● ニットを装着すると , ニット 部の 部をベース ニットの イ に挿入し, イ の
端を支点として, ニット上部のフッ が カチッ と音がする 押して い。 ニットが
し 装着 てい いと,誤動作,故 た 落 の原因に す。
● 振動の多い環境 使用する場合 , ニットを 締め付 て い。
● の締付 ,規定ト 範囲 行って い。 の締付 がゆるいと,落 ,短絡 た
誤動作の原因に す。 を締め過 ると, や ニットの破損による落 ,短絡 た 誤
動作の原因に す。
● 増設ケー ,ベース ニットの増設ケー 用コ タに確実に装着して い。装着後に,
浮上 が い 確認して い。接触不良によ ,誤動作の原因に す。
● SD カー ,装着スロットに押し込 確実に装着して い。装着後に,浮上 が い
確認して い。接触不良によ ,誤動作の原因に す。
● 拡張 SRAM カセット ,CPU ニットのカセット接続用コ タに押し込 確実に装着して
い。装着後 カセットカ ーを閉め,浮上 が い 確認して い。接触不良によ ,誤動作
の原因に す。
● ニット,SD カー ,拡張 SRAM カセット た コ タの,導電部分や電子部品に直接触
い い。 ニットの故 や誤動作の原因に す。
[配線上の注意事項]
警告
● 付 た 配線作業 ,必 システ 使用している外部供給電源を全相遮断して 行って
い。全相遮断し いと,感電, ニットの故 や誤動作の原因に す。
● 付 た 配線作業後,通電 た 運転を行う場合 ,必 製品に付属の端子カ ーを 付
RD77MSクイックスタートガイド
[配線上の注意事項]
注意
● FG 端子および LG 端子 ,シーケンサ専用の D 種接地(第 種接地) 上 必 接地して い。
感電 た 誤動作の恐 があ す。
● 圧着端子 適合圧着端子を使用し,規定のト 締め付 て い。 開形圧着端子を使用す
ると,端子 がゆる 場合に脱落し,故 の原因に す。
● ニットへの配線 ,製品の定格電圧および信号配列を確認後, し 行って い。定格と異
った電源を接続した ,誤配線した すると,火災 た 故 の原因に す。
● 外部機器接続用コ タ , ーカ指定の工具 圧着,圧接 た し ン 付 して い。
接続が不完全 場合,短絡,火災 た 誤動作の原因に す。
● コ タ ,確実に ニットに 付 て い。接触不良によ ,誤動作の原因に す。
● 制御線や通信ケー ,主回路や動力線と束線した ,近接 た し い い。
100mm 上を目 として離して い。ノイズによ ,誤動作の原因に す。
● ニットに接続する電線やケー ,必 トに納める , た ンプによる固定処理を
行って い。ケー のふ つ や移動,不注意の引っ張 による ニットやケー の
破損,ケー の接続不良による誤動作の原因に す。増設ケー に ,外皮を 除いた
ンプ処理を行わ い い。
● ケー 接続 ,接続するインタフ ースの種類を確認の上, し 行って い。異 ったイ
ンタフ ースに接続 た 誤配線すると, ニット た 外部機器の故 の原因に す。
● 端子 やコ タ 付 の締付 ,規定ト 範囲 行って い。 の締付 がゆ
るいと,落 ,短絡,火災 た 誤動作の原因に す。 を締め過 ると, や ニット
の破損による落 ,短絡,火災 た 誤動作の原因に す。
● ニットに接続 たケー を すと ,ケー 部分を引っ張 い い。コ
タ付 のケー , ニットの接続部分のコ タを持って して い。端子
接続のケー ,端子 端子 を めて して い。 ニットに接続 た状
態 ケー を引っ張ると,誤動作 た ニットやケー の破損の原因に す。
● ニット内に,切粉や配線 ズ の異物が入 いように注意して い。火災,故 た
誤動作の原因に す。
● 配線時に ニット内へ配線 ズ の異物混入を防 するため, ニット上部に混入防 ベ を
貼 付 てい す。配線作業中 ,本 ベ を が い い。システ 運転時 ,放熱の
ために本 ベ を必 がして い。
● 当社のシーケンサ ,制御 内に設置して使用して い。制御 内に設置 たシーケンサ電
源 ニットへの主電源配線に関して ,中 端子 を介して行って い。 た,電源 ニット
の交換と配線作業 ,感電保護に対して,十分に教育を た ンテ ンス作業者が行って
い。配線方法 ,MELSEC iQ-R ニット構成マニ ア を参照して い。
● システ 使用する E下しerne下 ケー ,MELSEC iQ-R E下しerne下/CC-Link IE ー ーズマニ ア
(スタートアップ )記載の仕様に従って い。仕様外の配線を行った場合, 常 ータ伝
要
6
RD77MSクイックスタートガイド
[立上げ
保
時の注意事項]
警告
● 通電中,端子に触 い い。感電 た 誤動作の原因に す。
● ッテ コ タ , し 接続して い。 ッテ に充電,分解,加熱,火中投入,シ ー
ト, ン 付 ,液体を付着 る,強い衝撃を える と 絶対に行わ い い。 ッテ
の 扱いを誤ると, 熱,破裂, 火,液漏 によ ,ケ た 火災の恐 があ す。
● 端子 ,コ タ 付 た ニット固定 の増し締めや, ニットの清掃 ,必 シ
ステ 使用している外部供給電源を全相遮断して 行って い。全相遮断し いと,感電
の恐 があ す。
[立上げ
保
時の注意事項]
注意
● CPU ニット た インテ ント機能 ニットに外部機器を接続して,運転中のシーケンサに
対する制御( ータ変更)を行うと ,常にシステ 全体が 全側に働 ように,プロ 上
インタロッ 回路を構成して い。 た,運転中のシーケンサに対するその の制御(プロ
変更,パ ータ変更,強制出力,運転状態変更(状態制御))を行うと ,マニ ア を熟読し,
十分に 全を確認して 行って い。確認を怠ると,操作 スによ 機 の破損や事故の原
因に す。
● 外部機器 遠隔地のシーケンサに対する制御 , ータ交信異常によ ,シーケンサ側のト
にす に対応 い場合があ す。プロ 上 インタロッ 回路を構成すると共に,
ータ交信異常が 生したと のシステ としての処置方法を外部機器と CPU ニット間 決
めて い。
● ニットの分解 た 改造 し い い。故 ,誤動作,ケ た 火災の原因に す。
● 携 電話や PHS の無線通信機器 ,シーケンサ本体の全方向 25続m 上離して使用して
い。誤動作の原因に す。
● ニットの着脱 ,必 システ 使用している外部供給電源を全相遮断して 行って い。
全相遮断し いと, ニットの故 や誤動作の原因に す。
● の締付 ,規定ト 範囲 行って い。 の締付 がゆるいと,部品や配線の落 ,
短絡 た 誤動作の原因に す。 を締め過 ると, や ニットの破損による落 ,短
絡 た 誤動作の原因に す。
● ニットとベース ニット,CPU ニットと拡張 SRAM カセット,および端子 の着脱 ,製品 使
用後,50 回 内(JIS B 3502 に準 )として い。 お,50 回を超えた場合 ,誤動作の原因
と る恐 があ す。
● SD カー の 付 し ,製品使用後,500 回 内として い。500 回を超え
た場合 ,誤動作の原因と る恐 があ す。
● SD カー 扱い時 , 出しに っているカー 端子に触 い い。故 や誤動
作の原因に す。
● 拡張 SRAM カセット 扱い時 ,基板上の IC に触 い い。故 や誤動作の原因に
す。
● ニットに装着する ッテ に ,落 衝撃を加え い い。落 衝撃によ , ッテ
が破損し, ッテ 液の液漏 が ッテ 内部 生している恐 があ す。落 衝撃を加
RD77MSクイックスタートガイド
[配線上の注意事項]
注意
● 制御 内 の立上げ 保 作業 ,感電保護に対して,十分に教育を た ンテ ンス作業者が
行って い。 た, ンテ ンス作業者 外が制御 を操作 いよう,制御 に鍵を
て い
● ニットに触 る前に ,必 接地 た金属 の導電物に触 て,人体 に 電している静
電気を放電 て い。静電気を放電 いと, ニットの故 や誤動作の原因に す。
● 試運転 ,パ ータの速度制限値を遅い速度に設定し,危険 状態が 生したと 即 に停
る準備をして 動作確認を行って い。
● 運転前にプロ および各パ ータの確認 調整を行って い。機 によって 予期し
い動 と る場合があ す。
● 絶対位置システ 機能を使用している場合,新規立上げしたと , た ニット,絶対値対応
ータ等を交換したと 必 原点復帰を行って い。
● ーキ機能を確認して 運転を行って い。
● 点検時に テスト(絶縁抵抗測定)を行わ い い。
● 保 点検終了時,絶対位置検出機能の位置検出が しい 確認して い。
● 電気設備に関する教育を ,十分 知識を有する人のみ制御 を開 る とが るよう,制御
に鍵を て い。
[運転時の注意事項]
注意
● インテ ント機能 ニットにパソコン の外部機器を接続して運転中のシーケンサに対する
制御(特に ータ変更,プロ 変更,運転状態変更(状態制御))を行うと ー ーズマニ
ア を熟読し,十分に 全を確認して 行って い。 ータ変更,プロ 変更,状態制
御を誤ると,システ の誤動作,機 の破損や事故の原因に す。
● ニット内のフ ッシ ROMへ ッフ の設定値を登録して使用する場合,登録中 ニット
装着局の電源OFFおよびCPU ニットの セットを行わ い い。登録中に ニット装着局の
電源OFFおよびCPU ニットの セットを行うと,フ ッシ ROM内の ータ内容が不定と , ッ
フ への設定値の再設定,フ ッシ ROMへの再登録が必要 す。 た, ニットの故 や誤
動作の原因に す。
● 補間運転の基準軸速度指定のと ,相手軸(2軸目,3軸目,4軸目)の速度が設定速度よ 大
(速度制限値 上) る場合があ すの 注意 い。
● 試験運転やテ ーチン の運転中 機 に近寄 い い。傷害の原因に す。
[廃棄時の注意事項]
注意
● 製品を廃棄すると ,産業廃棄物として扱って い。
● ッテ を廃棄する ,各地域にて定め ている法令に従い分別を行って い。EU 加盟国
要
8
RD77MSクイックスタートガイド
[輸送時の注意事項]
注意
● チ を含有している ッテ の輸送時 ,輸送規制に従った 扱いが必要 す。規制対象機種の
詳細について ,MELSEC iQ-R ニット構成マニ ア を参照して い。
● 木製 包材の消毒および除虫対策の 蒸 に含 る ロ ン系物質(フッ素,塩素,臭素,
素 )が当社製品に侵入すると故 の原因に す。残留した 蒸成分が当社製品に侵入し
いように 注意いた , 蒸 外の方法(熱処理 ) 処理して い。 お,消毒および
RD77MSクイックスタートガイド
目 次
安全上のご注意 ... 1
目次 ... 9
1 概 要 ... 1~12 1.1 ンプ ー ン ニッ の特長 ... 11
1.「 関連マニ ア ... 11
2 ニットの立上げ ... 13~20 「.1 構成 ... 14
「.「 機器の準備 ... 15
「.」 立上げ手順 ... 16
「.4 ニッ の装着 ... 17
「.5 配線,および ー の接続 ... 18
3 位置決め制御の立上げ ... 21~42 」.1 プロ ェ の作成 ... 「1
」.「 ー ン プロ ラ の作成 ... 「」 」.」 ンプ ー ン ニッ のパラ ータ設定 ... 「9
」.4 動作チェッ ... 」6
」.4.1 JOG運転 ... 」6
」.4.「 原点復帰 原点位置の確立 ... 」9
」.4.」 位置決め制御 ... 41
4 同期制御の立上げ ... 43~60 4.1 構成 ... 44
4.「 同期制御の立上げ手順 ... 45
4.」 同期制御用パラ ータの作成 ... 46
4.」.1 構成の設定 ... 46
4.」.「 パラ ータ,サーボパラ ータの設定 ... 46
4.」.」 位置決め ータの設定 ... 47
4.」.4 同期制御パラ ータの設定 ... 48
4.」.5 ータの作成 ... 48
4.」.6 プロ ェ の保存 ... 5」
4.」.7 ンプ ー ン ニッ への書込み ... 5」
4.4 同期制御の動作確認 ... 54
4.4.1 原点復帰 ... 54
4.4.「 同期制御の始動 ... 55
4.4.」 タ オ ロを使った動作確認 ... 58
付 録 ... 61~72 付1 ー ン ... 61
付「 パラ ータと位置決め ータ ... 65
要
10
RD77MSクイックスタートガイド
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
1.概 要
RD77MSクイックスタートガイド1. 概 要
本 ッ ター ガ ,初め ンプ ー ン ニッ を使用さ 方 , ー ンサ
ン ニア ン ソ ェアMELSOFT GX Works」を使用 ンプ ー ン ニッ の配線,
JOG運転,プロ ラ 運転,同期制御ま を行うため 必要 事 操作をまとめた の 。
MELSEC じQ-R ー CPU ニッ の各 ニッ を十分活用 ため ,目的 応 関連マ
ニ ア を参照 く さい。
1.1 シンプ ーシ ン ニットの特長
(1) 位置決め,ア バン 同期, ,速度 の幅広い制御 可能 。
(「) 高度 ー ン制御を, ン ン ロッ (FB) の ー ン プロ ラ け 手
軽 実現 ま 。
(」) MELSOFT GX Works」 け プロ ラ ン ,サーボ調整,運用 保守 を行うこと ま 。 (4) SSCNETⅢ/H対応 高性能サーボアンプと接続 ま 。
1.2 関連マニ ア
(1) シンプ ーシ ン ニット
(2) MELSEC iQ-Rシ ーズシーケンサ
(3) サーボアンプについて
名称 資料番号
MELSEC じQ-R ンプ ー ン ニッ ー ー マニ ア ( ター アップ編)
ンプ ー ン ニッ の仕様,運転ま の手順, 構成,配線,運転例 つい 記
載 いま 。
IB-0」00「44
MELSEC じQ-R ンプ ー ン ニッ ー ー マニ ア (応用編)
ンプ ー ン ニッ の機能,入出力信号,バッ ,パラ ータ設定,プロ ラ
ン , ラ ー ン つい 記載 いま 。
IB-0」00「46
MELSEC じQ-R ンプ ー ン ニッ ー ー マニ ア (ア バン 同期制御編)
ンプ ー ン ニッ の同期制御 関 機能やプロ ラ ン つい 記載 いま
。
IB-0」00「48
名称 資料番号
MELSEC じQ-R CPU ニッ ー ー マニ ア ( ター アップ編)
CPU ニッ の性能仕様,運転ま の手順, ラ ー ン つい 記載 いま 。 SH-081「「」 MELSEC じQ-R CPU ニッ ー ー マニ ア (応用編)
CPU ニッ の ,機能, バ ,パラ ータ つい 記載 いま 。 SH-081「「4 MELSEC じQ-R CPU ニッ 構成マニ ア
MELSEC じQ-R ー ー ンサをご使用いた くと 必要 構成,仕様,取付け, 配線,保守点検 つい 記載 いま 。
SH-081「「「
名称 資料番号
SSCNETⅢ/H ンタ ェー MR-J4-_B(-RJ)/MR-J4-_B4(-RJ)/MR-J4-_B1(-RJ)サーボアンプ技術資料集 サーボアンプMR-J4-_B(-RJ)/MR-J4-_B4(-RJ)/MR-J4-_B1(-RJ)の入出力信号,各部の 称,パラ
ータ,立上げ手順 つい 説明 いま 。
SH-0」0098
SSCNETⅢ/H ンタ ェー 多軸ACサーボMR-J4W「-_B/MR-J4W」-_Bサーボアンプ技術資料集
「軸/」軸一体ACサーボアンプMR-J4W「-_B/MR-J4W」-_Bの入出力信号,各部の 称,パラ ータ,立
上げ手順 つい 説明 いま 。
1.概 要
12
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
2.ユニットの立上げ
RD77MSクイックスタートガイド2. ニットの立上げ
「~」章 ,ボー ネ を使用 た1軸 を想定 説明 ま 。
<装置>
<仕様>
ボー ネ ー (PB) : 10000.0μm (=10mm)
減速比(NL/NM) : 1/「 (負荷側おNLが/ ータ側おNMが)
ータ 「回転 と,負荷側のボー ネ 1回転 ま 。 ンコー 分解能 : 4194」04 おたulsご/rごvが
サーボアンプ : MR-J4-10B サーボ ータ : HG-KR ー
<運転パターン>
(1) 原点とP1間を往復 ま 。
原点(0mm) P1へ「000.00mm/mじnの速度 移動 P1 原点へ8000.00mm/mじnの速度 移動 (「) , を連続位置決め ま
<位置[mm]>
<速度[mm/min]>
2000.00
-8000.00
時間
時間 P1=100.0mm
2.ユニットの立上げ
14
RD77MSクイックスタートガイド
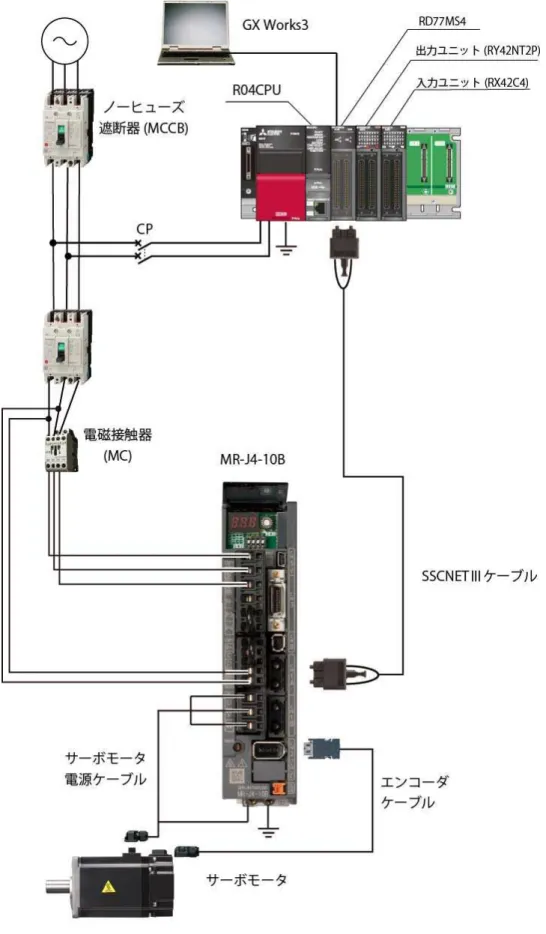
2.1 システ 構成
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
2.ユニットの立上げ
RD77MSクイックスタートガイド2.2 機器の準備
記の機器, ー ,およびソ ェアを準備 く さい 。
シンプ ーシ ン
ニット
ン ニア ン
ソフト ア
RD77MS4 MELSOFT GX Works3
サーボアンプ サーボ ータ
MR-J4-10B HGーKR13
基本ベース ニット 電源 ニット シーケンサCPU ニット 入出力 ニット
R35B R61P R04CPU RX42C4
(入力)
RY42NT2P (出力)
ンコー ケー サーボ ータ
電源ケー
SSCNETⅢケー MR-J3BUS_M
USBケー
ノー ーズ遮断器
(MCCB)
電磁遮断器 (MC)
サーキットプロテ タ
2.ユニットの立上げ
16
RD77MSクイックスタートガイド
2.3 立上げ手
の立上げ 必要 目 つい 操作内容,手順を説明 ま 。
「. ニッ の立上げ
「.1 構成
「.「 機器の準備 「.」 立上げ手順 「.4 ニッ の装着
(1) バッ の装着
(「) 拡張SRAM セッ とSD ー の装着
(」) ニッ の装着
「.5 配線,および ー の接続 (1) 電源 ニッ の配線
(「) サーボアンプの電源とサーボ ータ動力線の配線
(」) サーボアンプの軸選択ロータ ッチ設定
(4) 各種 ー の接続
(5) の電源投入
(6) サーボアンプの電源投入
」. 位置決め制御の立上げ 」.1 プロ ェ の作成
(1) ン ニア ン ソ ェアの ン ー
(「) プロ ェ の作成
(」) パソコンと ー ンサCPU ニッ の接続 (」) ー ンサCPU ニッ の初期化
(4) ー ン パラ ータの設定
」.「 ー ン プロ ラ の作成
(1) ー ン プロ ラ の新規作成
(「) 複数コ ン 表示の設定 (」) ローバ ラベ の登録 (4) 部品選択ウィンドウの表示
(5) ニッ ラベ を使った ー ン プロ ラ の作成
(6) ニッ FBを使った ー ン プロ ラ の作成
(7) プロ ェ の保存 (8) ー ンサへの書込み
」.」 ンプ ー ン ニッ のパラ ータ設定
(1) ンプ ー ン設定機能の起動
(「) 設定
(」) パラ ータ設定 (4) サーボパラ ータ設定 (5) 位置決め ータ設定 (6) プロ ェ の保存
(7) ンプ ー ン ニッ への書込み
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
2.ユニットの立上げ
RD77MSクイックスタートガイド2.4 ニットの装着
準備 た ニッ を装着 ま 。
(1) ッテ の装着
CPU ニッ のQ6BAT ,コネ タを た状態 出荷さ ま 。
使用時 , 記の手順 コネ タを接続 く さい。
CPU ニッ 底部の バーを開けま 。
Q6BAT(1) く装着さ い 確認 ま 。
Q6BAT 取 付け い コネ タ(「)を, バー側のコネ タ ン(」) 向 を確認
差 込みま 。コネ タ 奥ま っ と押 込 く さい。
CPU ニッ 底部の バーを閉 ま 。
(2) 拡張SRAMカセットとSD カー の装着
本 ,拡張SRAM,SD ー を使用 ま の 省略 ま 。
詳細 , MELSEC じQ-R CPU ニッ ー ー マニ ア ター アップ編 を参照
く さい。
(3) ニットの装着
各 ニッ をベー ニッ へ装着 ま 。
詳細 , MELSEC じQ-R ニッ 構成マニ ア を参照 く さい。
2.ユニットの立上げ
18
RD77MSクイックスタートガイド
2.5 配線,およびケー の接続
ンプ ー ン ニッ とサーボアンプの配線,および各 ー の接続例を示 ま 。
以 ,サーボアンプMR-J4-10Bを使用 た場合の電線サ 説明 いま 。
サーボアンプの容量 異 場合 ,各サーボサンプ技術資料集を参照 く さい。
(1) 電源 ニットの配線
電源 ニッ 電源線と接地線を配線 例 。
電源系統 多い場合 ,絶縁 ラン を接続 く さい。
項目 適合電線サイズ 締付 ト
電源線 0.75~「mm「 AWG18~AWG14 1.0「~1.」8N・m
接地線 0.75~「mm「 AWG18~AWG14 1.0「~1.」8N・m
(2) サーボアンプの電源とサーボ ータ動力線の配線
サーボアンプ 制御回路電源 L11,L「1 ,主回路電源 L1,L「,L」 とサーボ ータ電源 ー
を配線 く さい。
項目 適合電線サイズ 締付 ト
制御回路電源 (L11,L「1) 1.「5mm「 AWG16
主回路電源 (L1,L「,L」 「mm「 AWG14
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
2.ユニットの立上げ
RD77MSクイックスタートガイド(3) サーボアンプの軸選択ロータ スイッチ設定
サーボアンプの軸選択ロータ ッチ 0 ~ F ,正01~正16 対応 ま 。
SSCNET構成 と軸選択ロータ ッチの関係を 図 示 ま 。
対応 軸No. よう ッチを設定 く さい。
(4) 各種ケー の接続
SSCNETⅢ ー , ンコー ー ,サーボ ータ電源 ー を接続 く さい。
また,パソコンと ー ンサCPU間 USB ー を接続 く さい。
(5) システ の電源投入
電源 ニッ の配線を確認 く さい。
ー ンサCPU ニッ STOP状態 っ い ことを確認 く さい。
ー ンサの電源をON ま 。
(a) 電源 ニッ :LED(緑色)点灯 (b) CPU ニッ :READY LED(緑色)点灯
パラ ータ,プロ ラ CPU ニッ 書 込ま い いと, ー ンサCPU
のERROR LED 赤色 点滅 ま 問題あ ま 。パラ ータ,プロ ラ を書
込み後,電源をOFF→ON とERROR LED 消灯 ま 。
2.ユニットの立上げ
20
RD77MSクイックスタートガイド
(6) サーボアンプの電源投入
記の 目を確認後,電源を投入 ま 。
サーボアンプの配線を確認 く さい。
サーボアンプの電源をON ま 。
サーボアンプの表示部 , ンプ ー ン ニッ との交信状態を確認 こと ま
。
サーボアンプ LED表示 状態 内容 配線結果
AA ニ ラ 待機中 サーボアンプの電源ON中 サーボ コ ン ローラの電源 OFF った。
常
Aけ ニ ラ 中 通信仕様を初期設定中 あ 。
AC ニ ラ 中 通信仕様の初期設定 完了 ,サーボ コン ローラと同期 た。
Ad ニ ラ 中 サ ー ボ コ ン ロ ーラ と の 初期 パラ ータ設定通信中。
AE ニ ラ 中 サーボ コン ローラとのサーボ ー タ,および ンコー 情報通信中。
AF ニ ラ 中 サ ー ボ コ ン ロ ーラ と の 初期 信号 ータ通信中。
AH ニ ラ 完了 サーボ コン ローラとの初期 ータ 通信完了。
け01 オ サーボ コン ローラ の オ 指令を 信 た。
C01 サーボオ サーボ コン ローラ のサーボオ 指令を 信 た。
d01 サーボオン サーボ コン ローラ のサーボオ ン指令を 信 た。
E6.1 強制停 中 サーボアンプの強制停 警告
E7.1 緊急停 中 サーボ コン ローラの緊急停 入力 警告
消灯 制御電源 オ 異常
<対応方法>
ンプ ー ン ニッ パラ ータ 書 込ま い いと,サーボアンプのLED
表示 AA また Ab 問題 あ ま 。パラ ータを書 込 く さい。
LED 消灯の場合 ,制御電源の配線を確認 く さい。
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
3.位置決め制御の立上げ
RD77MSクイックスタートガイド3.位置決め制御の立上げ
3.1 プロ トの作成
(1) ン ニア ン ソフト アのインストー
MELSOFT じQ Works,また MELSOFT GX Works」を同 さ い ン ー 手順書 従っ
ン ー く さい。
品名 形名 概要
MELSOFT
じQ Works SW「DND-じQWK-J
FA ン ニア ン ソ ェア(日本語版) 管理ソ ェアおMELSOFT Navじgatorが
ー ンサ ン ニア ン ソ ェアおMELSOFT GX Works」が
ー ンコン ローラ ン ニア ン ソ ェアおMELSOFT MT Works「が
表示器画面作成ソ ェアおMELSOFT GT Works」が
ロボッ プロ ラ ン ソ ェアおMELSOFT RT ToolBoで「 mじnじが
ンバータセッ アップソ ェアおMELSOFT FR Confじgurator「が
MELSOFT
GX Works」 SW1DND-GXW」-J ンプ ー ン ニッ のパラ ータ設定, ー ン プロ ラ の作成 注) 使用 ソ ェアの画面と,本説明書の画面と 異 場合 あ ま 。
本 , MELSOFT GX Works」 Vごrsじon 1.007H を使用 いま 。
(2) プロ トの作成
MELSOFT GX Works」を起動 ,新規プロ ェ を作成 ま 。
(3) パソコンとシーケンサCPU ニットの接続
パソコンと ー ンサCPU ニッ の接続を確認 ま 。
1. CPU ニッ とパソコンを接続
「. おオンラ ンが → お接続先指定が
接続指定画面を表示
」. 接続先設定Connご止tじon画面 ,
CPU ニッ 直結設定 を選択
4. CPU ニッ との接続方法を選択 おプロ ェ ]→ お新規作成が
ー :RCPU
機種 :R04 使用 CPUを指定)
プロ ラ 言語 :ラ ー
CPU ニッ の ニッ ラベ を追加 画面
3.位置決め制御の立上げ
22
RD77MSクイックスタートガイド
(4) シーケンサCPU ニットの初期化
ー ンサCPUの を初期化 ま 。
の管理画面 お初期化がを ッ ま 。
(5) シーケンスパ ータの設定
パラ ータと各 ニッ のパラ ータを設定 ま 。
< ニット構成図の作成>
部品選択 ン ,使用 ベー ニッ
,CPU ニッ ,入出力 ニッ , ンプ
ー ン ニッ を選択 , ニッ 構成
図上 ラッ & ロップ ま 。
ニ ーのお編集が → おパラ ータが お確定] を選択 ま 。
配置 た ニッ の ニッ ラベ を追加 画
面 表示さ た ,お いがを ッ ま 。
ンプ ー ン ニッ を ッ
と, ンプ ー ン設定画面 表示さ ま
。
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
3.位置決め制御の立上げ
RD77MSクイックスタートガイド3.2 シーケンスプロ の作成
ラベ と ン ン ロッ (FB)を使用 こと よ , バ を意識 い ー ン
プロ ラ ン 作成 ま 。
(1) シーケンスプロ の新規作成
本書 使用 プロ ラ 例 ,付」 記載 いま 。
(2) 複数コ ント表示の設定
お複数コ ン 表示設定がを有効 と,表示言語 あわ ー ン プロ ラ のコ ン
3.位置決め制御の立上げ
24
RD77MSクイックスタートガイド
(3) ロー ベ の登録
ラベ と , 前や ータ型を任意 宣言可能 変数 。
プロ ラ ラベ を使用 と, バ やバッ ア を意識 こと く
プロ ラ を作成 ま 。そのため,ラベ を使用 たプロ ラ , ニッ 構成 異
簡単 再利用 ま 。
おラベ が → おGlobalが を選択 と, ローバ ラベ を登録 画面を表示 ま 。
表を参照 , ローバ ラベ を登録 く さい。
< ロー ベ の設定例>
ベ 名 ータ型 ス イス 日本語 英語
ビッ V _ イン ング運転中 ビッ V _ 2 の実行状態 ビッ V _ 常完了 ビッ V _ 異常完了 ビッ V _ 位置決め始動状態 ビッ V _ 位置決め始動完了 ビッ V _ 位置決め始動異常 ビッ V _ 位置決め始動要求 ワード[符号付き] V _ 軸
ワード[符号付き] V _ 位置決め始動 _ ブルワード
[符号付き]
V _ 速度設定メ ワード[符号付き] V _ 2 エ ーコード
ビッ V _ X 速度設定
ビッ V _ X 軸 2 ビッ V _ X 2 軸2 ※1 2
ビッ V _ X 原点復帰 ータ設定 ビッ V _ X 位置決め始動 ータ ビッ V _ X 同期用位置決め始動
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
3.位置決め制御の立上げ
RD77MSクイックスタートガイド(4) 部品選択 ン の表示
お表示が → お ッ ン ン が → お部品選択がを選択 ま 。
部品選択 ン のお ニッ がを選択 と, ニッ ラベ と ニッ FB 表示さ ま
。
(5) ニット ベ を使ったシーケンスプロ の作成
ニッ ラベ を選択 ま 。
ニッ ラベ ラベ を選択 ま 。
ラベ を ラッ & ロップ ま 。
ッ と,接点を任意の接点また コ 変更 ま 。
おOKがを と,回路を作成 ま 。
3.位置決め制御の立上げ
26
RD77MSクイックスタートガイド
(6) ニットFBを使ったシーケンスプロ の作成
ニッ FB 必要 ニッ FBを ラッ & ロップ ま 。
FB ン タン 入力 画面 表示さ ま 。
ン タン を ローバ ラベ ,また ロー ラベ のどちらに登録するか選択し,イン
スタンス を入力します。
回路を作成 位置 ーソ を移動 , ッ ま 。
回路記号を選択 ,変数を入力 ま 。
[ ]を ッ と,コ ン 入力 ン を表示 ま 。
コ ン を入力後,[ ]を ッ ま 。 回路を作成 位置 ーソ を移動 ,
ッ ま 。
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
3.位置決め制御の立上げ
RD77MSクイックスタートガイドニッ ラベ RD77_1を ラッ & ロップ と, ニッ ラベ を書 込みま 。
同様 回路を作成 おF4(変換)がを選択 と,回路を変換 ま 。
(7) プロ トの保存
作成 たプロ ェ を保存 ま 。
おプロ ェ が→お 前を付け 保存が を選択 , を入力後,お保存がを ッ
く さい。
保存 ータ
ー ンサCPUのパラ ータ, ー ン プロ ラ
ンプ ー ン ニッ の位置決め ータ,パラ ータ
3.位置決め制御の立上げ
28
RD77MSクイックスタートガイド
(8) シーケンサへの書込み
設定 たパラ ータと,作成 たプロ ラ を ー ンサ 書込みま 。
おオンラ ンが → お ー ンサへの書込みがを選択 と,オンラ ン ータ画面を表示
ま 。
パラ ータ,CPUパラ ータ, ニッ パラ ータ,およびプロ ラ を
選択 ま 。
お実行がを ッ と, ー ンサ 書込みを開始 ま 。
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
3.位置決め制御の立上げ
RD77MSクイックスタートガイド3.3 シンプ ーシ ン ニットのパ ータ設定
(1) シンプ ーシ ン設定機能の起動
MELSOFT GX Works」の ニ ーのお ンプ ー ン ニッ 設定]を ッ
と, ンプ ー ン ニッ 設定画面 開 ま 。
(2) システ 設定
お 構成がを選択 ま 。
装置 あわ アンプ設定を行いま 。
サーボアンプを設定 ま 。
3.位置決め制御の立上げ
30
RD77MSクイックスタートガイド
(3) パ ータ設定
装置仕様
機 構成 :ボー 水平
単位設定 :0:mm
ボー ネ ッチ :10000.0おμmが
減速比(NL/NM) :1/「 負荷側おNLが/ ータ側おNMが
ータ 「回転 と,負荷側のボー ネ 1回転 ま 。
ンコー 分解能 :4194」04おたulsご/rごvが サーボアンプ :MR-J4-10B
サーボ ータ :HG-KR ー
操作手順
ニ ー パラ ータを選択 ま 。
お基本パラ ータ1の算出がを ッ と,電子 アを算出 画面を表示 ま 。
装置の仕様 あわ パラ ータを設定 ま 。
設定後,お基本パラ ータ1算出がを ッ と,電子 アを計算 ま 。
おOKがを ッ と,電子 アの ータをパラ ータ 書 込みま 。
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
3.位置決め制御の立上げ
RD77MSクイックスタートガイドPOINT
おPr.8「 緊急停 有効/無効設定がを 1:無効 設定 ま 。
おPr.8「 緊急停 有効/無効設定が ,安全を考慮 有効 っ いま ,本装置 ,
緊急停 を使用 いため, 1:無効 設定 ま 。
おPr.116 FLS信号選択が,おPr.117 RLS信号選択が,おPr.118 DOG信号選択が,おPr.119 STOP信号選 択がの入力種別を設定 ま 。
本装置 ,原点復帰 ータセッ 式,FLS,RLS,STOP 使用 いため, 15:無効 設
定 ま 。
共通パラ ータ,基本パラ ータ,詳細パラ ータ,原点復帰パラ ータ,および拡張パラ
ータを必要 応 設定します。(付「の設定例参照
(4) サーボパ ータ設定
操作手順
ニ ー おサーボパラ ータがを選択 ま 。
お基本設定がを ッ と,共通基本設定画面を表示 ま 。
回転方向を設定 ま 。
POINT
装置 あわ 回転方向を設定 ま 。
転パ 入力時CCW方向,逆転パ 入力時CW方向 , 転パ 入力時CW方向,逆転パ
3.位置決め制御の立上げ
32
RD77MSクイックスタートガイド
サーボ強制停 選択を無効 ま 。
POINT
サーボ強制停 選択 ,サーボアンプ 強制停 入力信号を取 込 否 を選択 ま 。初期
値 ,安全を考慮 有効 強制停 入力EM「,また EM1を使用 っ いま 。
機 の衝突 よ ,機 系 狂い 生 た場合 ,確認 調整後,安全を確保 絶対
位置を確立 く さい。本装置 緊急停 を使用 ま の , :無効 設定 ま 。
お構成品がを選択 と,構成品画面を表示 ま 。
お絶対位置検出 / ン ンタ がを選択 ま 。
絶対位置検出 の選択 , 無効 ン ンタ 使用 を
選択 ま 。
原点セッ 条件選択 , 電源投入後サーボ ータZ相通過不要 を選択 ま 。
POINT
電源投入後サーボ ータZ相通過不要 を選択 と,原点復帰時,サーボ ータ 1回転以上回
転 く 原点復帰 可能 ま 。
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
3.位置決め制御の立上げ
RD77MSクイックスタートガイド(5) 位置決め ータ設定
原点(P0)とP1を往復 プロ ラ 例を使っ ,位置決め ータの設定方法を説明 ま 。
P1へ移動後,原点(P0)へ戻 動作例
操作手順
ニ ー 軸1位置決め ータを選択 ま 。
お ータ設定ア タン がを選択 ま 。
位置決め ータ方式と各 目を入力 ま 。 <位置[mm/min]>
P1=100.0mm
P0=0.0mm
2000.00 <速度[mm/min]>
-8000.00
時間
3.位置決め制御の立上げ
34
RD77MSクイックスタートガイド
おセッ がを ッ と, ータ設定ア タン 画面を閉 ,位置決め ータ画面
を表示 ま 。
同様に, から原点へ戻る位置決め ータを作成します。
No. 運転
パターン 制御方式 補間 対象軸
加速時間
No.
減速時間
No.
位置決め ア ス
円弧
ア ス 指令速度 タイ Mコー
:連続 :
直線 : : μ μ 2 2 :終了 :
直線 : : μ μ
位置決め ータの作成完了
(6) プロ トの保存
作成 たプロ ェ を保存 ま 。
おプロ ェ が→お 前を付け 保存がを選択 , を入力後お保存がを ッ
く さい。
保存 ータ
ー ンサCPUのパラ ータ, ー ン プロ ラ
ンプ ー ン ニッ の位置決め ータ,パラ ータ
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
3.位置決め制御の立上げ
RD77MSクイックスタートガイド(7) シンプ ーシ ン ニットへの書込み
MELSOFT GX Works」 おオンラ ンが → お ー ンサへの書込みが を選択 と,オンラ ン ータ操作画面を表示 ま 。
ンプ ー ン ニッ 設定を選択 ま 。
お実行がを ッ と, ー ンサ経由 ンプ ー ン ニッ へ書込みま 。
ラッ ROM書込みの確認 ッセー を表示 ま の ,お いがを ッ ま 。
お閉 がを ッ , ンプ ー ン ニッ への書込みを完了 ま 。
ンプ ー ンへの書込み ータ
パラ ータ,サーボパラ ータ 位置決め ータ, ロッ 始動 ータ
3.位置決め制御の立上げ
36
RD77MSクイックスタートガイド
3.4 動作チ ッ
本節 説明 ー ン プロ ラ ,R04CPU,およびRD77MS4を使用 た例 。
の ニッ を使用 場合 ,信号の割付け 異 ま 。
各信号の詳細 ー ー マニ ア 応用編 を参照 く さい。
3.4.1 JOG運転
(1) サーボON
全軸サーボON信号(Y1)をON こと ,サーボアンプをサーボON状態 こと ま 。
ー ンサCPU ニッ のおRESET/RUN/STOPが ッチをRUN側 ま 。
ー ン プロ ラ サーボON
MELSOFT GX Works」 おオンラ ンが→お ニタが→お ニタ開始がを選択 と, ニタ 換わ ま 。
ー ンサ ON信号 X7B へ ーソ を移動 ま 。
SHIFT ーを押 ー ンサ ON信号 X7B を ッ と,X7B ON
ま 。
POINT
SHIFT ーを押 指定 たOFF い バ を ッ と,OFF→ON ま
。ON い バ を ッ と,ON→OFF ま 。
(2) JOG速度の設定
JOG運転 JOG速度を設定後, 転JOGまた 逆転JOGをON ま 。
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
3.位置決め制御の立上げ
RD77MSクイックスタートガイド(3) JOG始動
転指令 方向 移動,逆転指令 方向 移動 ことを確認 ま 。
軸1(X61)を選択 ま 。
転JOG(X6E),逆転JOG(X6F)のい を選択 ま 。
ーソ を 転JOG,また 逆転JOGの位置へ移動 ,SHIFTを押 ッ
ま 。
(4) JOG運転の確認
JOG運転の動作確認 軸 ニタ画面 確認を ま 。
軸 ニタ画面 ニタ選択 目 転JOG始動,逆転JOG始動 の信号を追加 ま 。
軸 ニタ画面 お ニタ 目選択がを ッ ま 。
選択可能 目 追加 目を選択 ま 。
おC正.181 転JOG始動がを選択 ,お追加がを ッ ま 。
3.位置決め制御の立上げ
38
RD77MSクイックスタートガイド
JOG運転中 軸 ニタ画面 各 ータ を確認 ま 。
(5) ータの回転方向の確認
ータの回転方向の 転,逆転を入 替え 場合 変更 ま 。 おサーボパラ ータがを選択 ま 。
おサーボパラ ータがのお基本設定がを選択 ま 。
サーボ ータの回転方向を装置 あわ 選択 ま 。
POINT
装置 あわ 回転方向を設定 ま 。
転パ 入力時CCW方向,逆転パ 入力時CW方向 , 転パ 入力時CW方向,逆転パ
入力時CCW方向 のい を選択 ま 。
サーボパラ ータを ンプ ー ン ニッ 書込み後,サーボアンプと ンプ ー ン
と 電源をOFF/ON ま
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
3.位置決め制御の立上げ
RD77MSクイックスタートガイド3.4.2 原点復帰 原点位置の確立
原点復帰制御 ,ア 情報を使用 機 原点を確立 機 原点復帰と,機
原点復帰 確立 た 標へ位置決めを行う高速原点復帰 あ ま 。
本書 ,機 原点復帰を ータセッ 式 行う方法を説明 ま 。
機 原点復帰を 位置決め始動番号 9001を設定 た後,位置決め始動をON と原
点復帰を開始 ま 。
項目 ッフ 信号 内容
軸1位置決め始動番号 4」00 位置決め始動番号を設定 ま 。
機 原点復帰 9001を設定 ま 。
軸1位置決め始動 Y10 原点復帰,位置決め始動を行いま 。
POINT
機 原点復帰を 位置決め始動番号 9001を設定 た後,位置決め始動をON と原点復帰
を開始 ま 。
(1) 原点復帰番号の設定
軸1を選択 ま 。SHIFTを押 ッ ま 。
(2) 原点復帰の始動
SHIFTを押 ッ を と,位置決め始動番号(9001)をバッ
設定 ま 。
3.位置決め制御の立上げ
40
RD77MSクイックスタートガイド
(3) 原点復帰の確認
軸 ニタ画面 ,以 の ニタ値, ータ を確認 ま 。
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
3.位置決め制御の立上げ
RD77MSクイックスタートガイド3.4.3 位置決め制御
ア 情報を使用 ,指定の位置 位置決めを行う位置決め制御の動作確認方法を説明
ま 。位置決め始動 , ー ン プロ ラ と ン ン ロッ の「種類 あ
ま 。
位置決め制御 ン ン ロッ ,同期制御 ー ン プロ ラ 始動 ま 。
おP1へ移動後,元の位置へ戻 動作例が
位置決めを ,位置決め始動番号を設定 た後,位置決め始動をON と位置決めを
開始 ま 。
項目 ッフ 信号 内容
軸1位置決め始動番号 4」00 位置決め始動番号を設定 ま 。
軸1位置決め始動 Y10 位置決め始動を行いま 。
(1) 位置決め制御の始動No.を設定
位置決め始動No.を設定 ま 。SHIFTを押 ッ を ま
2000.00 <速度[mm/min]>
-8000.00 P1=100.0mm
P0=0.0mm <位置[mm/min]>
時間
3.位置決め制御の立上げ
42
RD77MSクイックスタートガイド
(2) 位置決め始動
位置決め始動を ま 。SHIFTを押 ッ を ま 。
(3) 軸1位置決め制御の確認
軸1の送 現在値を見 100.0mmま 移動 ,0.0mmへ戻 ことを確認 ま 。
軸1の送 速度 指令速度 っ い ことを確認 ま 。
軸 ニタ 各種 ニタ値, ータ をチェッ ま 。
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
4.同期制御の立上げ
RD77MSクイックスタートガイド4.同期制御の立上げ
本章 同期制御 つい 説明 ま 。
同期制御パラ ータ,同期制御用位置決め ータ,同期制御の動作確認を主 説明 ま 。
軸1 ,「章 説明 た動作と同 の ,パラ ータ,サーボパラ ータ 「~」章を参照
く さい。
<走行切断装置>
動作中のコンベア軸(軸「)を停 , ッター軸(軸1)をコンベア軸 追従さ ワー 中
央を 断 装置。 断後, ッター軸 待機位置へ移動 ま 。 ッター軸 電子 を用
いた同期制御を行いま 。
<仕様>
ベ コンベアのローラ 1回転 と,ベ コンベア上のワー 1個分移動 装置
。
(1) ッター軸( 制御軸)の仕様 ボー ネ ー (PB) :10mm 外付減速機の ア比 :1/「
の ロー 量 :100.0000mm
(「) ベ コンベア軸の仕様
ローラの直 :50mm (ローラの円周 50mmェπ=157079.6μm) 外付減速機の ア比 :1/1 (ローラ サーボ ータを直結)
<装置の動作パターン>
ベ コンベア 同期 , ッター軸(軸1 一定距離移動 ま 。
同期時,カッターをシーケンス制御に さげます。同期後,元の位置へ戻 ます。 ベル コンベア 一定速度で移動します。
2000.00 <速度[mm/min]>
<速度[mm/min]>
2000.00 ベ トコンベア軸 カッター軸
4.同期制御の立上げ
44
RD77MSクイックスタートガイド
4.1 システ 構成
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
4.同期制御の立上げ
RD77MSクイックスタートガイド4.2 同期制御の立上げ手
4.1 構成
4.「 同期制御の立上げ手順 4.」 同期制御用パラ ータの作成
4.」.1 構成の設定
4.」.「 パラ ータ,サーボパラ ータの設定 4.」.」 位置決め ータの設定
4.」.4 同期制御パラ ータの設定 (1) 同期パラ ータの設定 (「) 入力軸パラ ータの設定 (」) 同期パラ ータの画面遤移 4.」.5 ータの作成
(1) ータの新規作成
(「) 曲線の作成
4.」.6 プロ ェ の保存
4.」.7 ンプ ー ン ニッ への書込み
4.4 同期制御の動作確認 4.4.1 原点復帰 4.4.「 同期制御の始動
(1) 同期 出力軸の始動と確認
(「) 主軸(入力軸)の始動と確認 (」) 主軸(入力軸)の動作確認
4.4.」 タ オ ロを使った動作確認
(1) タ オ ロの起動
(「) プロー の選択
(」) サンプ ン の条件設定 変更不要
(4) ガ条件の設定 変更不要
(5) サンプ ン 開始
4.同期制御の立上げ
46
RD77MSクイックスタートガイド
4.3 同期制御用パ ータの作成
4.3.1 システ 構成の設定
「軸の 構成を設定 ま 。
4.3.2 パ ータ,サーボパ ータの設定
軸1と軸「のパラ ータ,サーボパラ ータの設定を行いま 。
ベ コンベアの電子 アの設定を記述 ま 。
POINT
電子 ア 円周率π の影響 よ 割 い場合,誤差 少 く よう 自動計算さ ま
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
4.同期制御の立上げ
RD77MSクイックスタートガイド4.3.3 位置決め ータの設定
ベ コンベア(軸「) 原点 P1へ移動 プロ ラ を作成 ま 。
制御を 軸1 ベ コンベア 同期 ータを作成 ま 。
お原点 P1へ移動 位置決め ータ例が
(1) 位置決め ータの選択
メニューから軸2位置決め ータを選択します。
<軸「位置決め ータ>
№ 運転 パターン
制御 方式
補間 対象軸
加速時間 No.
減速時間 No.
位置決め ア ス
円弧
ア ス 指令速度 タイ Mコー
1 0:終了 INC
直線1 - 1:1000 1:1000
157079.6 μm
0.0 μm
2000.00
mm/min 0ms 0 100.0mm
0.0mm
カッター軸 軸1 の位置 ベ トコンベア 軸2 の位置
157.0796mm
0.0mm
直径50mmのロー が1回転 すると,ベ トコンベアが 157.0796mm移動し す。
ベ トコンベアの移動に 追従して,軸1をカ 制御 し す。
時間 時間
<速度[mm/min]>
2000.00
4.同期制御の立上げ
48
RD77MSクイックスタートガイド
4.3.4 同期制御パ ータの設定
軸「サーボ入力軸の送 現在値 同期 動作 軸1のパラ ータを設定 ま 。
項目 内容
入力軸パラ ータ 主軸 サーボ入力軸種別を設定 (軸「 1:送 現在値 )
同期パラ ータ軸1 軸1の同期制御パラ ータを設定
同期制御 ー 主軸 関連 た出力軸を構成 表示。 入力軸と出力軸の構成 一目 わ ま 。
(1) 同期パ ータの設定
軸1を軸「の送 現在値 同期さ 設定 つい 記述 ま 。
お主軸( ン)がを選択 と, ン入力軸の種別 選択さ ま 。
1
概
要
2
ユニット
の立上
げ
3
位置決め
制御の
立上げ
4
同期制御
の立上
げ
付
録
4.同期制御の立上げ
RD77MSクイックスタートガイド表赤枠の箇所を変更 ま 。 <同軸パラ ータ軸1>
項目 内容
主軸
ン入力軸番号 Pr.400:種別 1:サーボ入力軸 Pr.400:軸番号 「
サ 入力軸番号 Pr.401:種別 0:無効 Pr.401:軸番号 0 主 軸 合 成
ア
Pr.40「: ン 1:入力+
Pr.40「:サ 0:入力
主 軸 入 力 ア
Pr.40」:分子 1
Pr.404:分母 1
主軸 ラッチ
主軸 ラッチ 制御設定
Pr.405:ON制御 ー 0: ラッチ (直結動作) Pr.405:OFF制御 ー 0:OFF制御無効
Pr.405:高速入力要求信号 0
出力軸
軸サ 単位
Pr.」「8:単位設定選択 0: ン入力軸の単位を使用 Pr.4」8:単位 0mm
Pr.4」8:小数点桁数 0
Pr.44「: 軸1サ 長変更設定 0:無効
Pr.4」9: 軸1サ 長 157.0796mm
Pr.441: ロー 量 100000.0μm
Pr.440: No. 1
Pr.444: 軸位相補 進め時間 0μs
Pr.445: 軸位相補 時定数 10ms
Pr.446:同期制御減速時間 0ms
Pr.447:出力軸 ー ン 時定数 0ms
4.同期制御の立上げ
50
RD77MSクイックスタートガイド
(2) 入力軸パ ータの設定
軸1を軸「の送 現在値 同期さ 設定 つい 記述 ま 。
ニ ー お入力軸パラ ータがを選択 ま 。
軸「のおPr.」00 サーボ入力軸種別が 1:送 現在値 を選択 ま 。
<入力軸パラ ータ 軸「 >
項目 内容
サーボ入力軸
サーボ入力軸種別 1:送 現在値
詳細設定 ー ン 時定数 0ms
位相補 進め時間 0μs
位相補 時定数 10ms
回転方向制限 0:回転方向制限