膝関節運動制限による下肢の関節運動と筋活動への影響
―支持面の前後傾斜刺激による検討―
山岸 祐太
<要約> 本研究の目的は,膝関節装具により膝関節運動を制限し,支持面の前後回転傾斜刺激を与えた場合の 下肢関節や姿勢筋への影響を調べ,膝関節運動の働きを明確にすること,および股・足関節運動が膝関 節運動をどのように補償しているのかを明確にすることである.被験者は健常若年者10
名とした.傾 斜刺激は周波数0.75Hz
,振幅15°
の正弦波を刺激周期20
回与えた.その結果,膝関節伸展制限により, 股・足関節運動角は増加したが,膝関節運動角の変化は認めなかった.また,膝関節伸展制限により, 前脛骨筋,大腿直筋の筋活動量は有意に増加し,腓腹筋外側頭は減少した.一方,大腿二頭筋,腹直筋, 脊柱起立筋は変化しなかった.また,膝関節屈曲制限により,下肢関節運動角,筋活動量に変化はなか った.これらのことから,膝関節伸展制限が生じる場合,股・足関節運動角,下肢筋活動量を変化させ ることで立位を保持すると考えられる.Ⅰ.はじめに
膝関節可動域制限は運動能力の低下,日常生活 範囲の狭小,姿勢制御能力の低下を起こす1).転 倒を含めた姿勢不安定性は姿勢制御系の低下と密 接に関連している2).また膝関節は多関節運動連 鎖の一環に組み込まれ,日常動作における姿勢制 御に大きな役割を果たす3).これらのことから, 立位姿勢を保持するために,膝関節運動は,股・ 足関節運動と協調する必要がある.しかし,支持 面の前後回転傾斜刺激に対する膝関節と股・足関 節間の働きに関する報告は少ない. そこで,本研究は膝関節運動を制限したときの 股・足関節運動の変化を調べることにした.これ により,膝関節運動の働きを明確にすること,股・ 足関節運動が膝関節運動をどのように補償してい るのか明確にすることを目的とする.Ⅱ.対象と方法
1
.対象 本実験に同意を得た健常成人10
名(男性4
名・ 女性6
名,年齢:21
.6
±0
.5
歳)を対象とした.ま た,既往歴に下肢関節に神経学的及び整形外科的 疾患を有しない者とした.2
.使用機器(1)
傾斜台 姿勢動揺システム(Nambumechatro
社製SB-NB0908HO
)を使用した.外部スイッチによ り支持面が前後に回転する傾斜刺激を与えた.傾 斜刺激は,正弦波状に与え,振幅15°
,周波数0
.75Hz
,刺激周期20
回とした.(2)
膝関節運動制限装具 ダイアルロック膝継手靭帯損傷用装具を使用し た.両膝関節に装着し,以下の4
種類の膝関節運 動制限を設定した.①膝関節運動制限を設けない, ②膝関節屈曲20°
で膝関節屈曲運動制限を設け, 伸展運動制限を設けない,③膝関節屈曲20°
で膝 関節伸展運動制限を設け,屈曲運動制限には設け ない,④膝関節屈曲20°
で屈曲伸展運動制限を設 ける.(3)
表面筋電計MultiTelemeter
(日本光電社製)を使用した. 導出筋は左の前脛骨筋(以下,TA
と略す),腓腹 筋外側頭(以下,GAS
と略す),大腿直筋(以下,RF
と略す),大腿二頭筋(以下,BF
と略す),腹 直筋(以下,RA
と略す),脊柱起立筋(以下,ES
と略す)とした.なお,本実験課題は左右対称性 のものであるため,筋電図を貼付してない右半身は左半身と同様の運動をしていると考えた.筋電 データは
20
-450Hz
のバンドパスフィルターを用 い,積分筋電を導出し,最大随意収縮の値で標準 化した.(4)
三次元動作解析装置MotionAnalysis
(MotionAnalysis
社製EvaRT4.3.57
,米国)を使用した.反射マーカー は,右耳孔,右上肢(肩峰,上腕骨外側上顆,手 関節,第三中手骨頭),右下肢(大転子,外果,踵 骨後面,第五中足骨骨頭),胸骨上縁,剣状突起, 両肋骨下縁,右上前腸骨棘,右腸骨稜,および右 膝関節装具屈曲伸展軸に貼付した.なお,本実験 は左右対称性のものであるため,反射マーカーを 貼付していない左半身は右半身と同様の運動をし ていると考えた.また,傾斜台の回転を把握する ために,傾斜台の前後2
点にも反射マーカーを貼 付した.8Hz
のローパスフィルターを用い,身体 動揺と関節角度を算出した. カメラはHAWK-200RT
(MotionAnalysis
社 製)を6
台使用した.3
.立位保持課題(図1
) 開眼,開脚立位で傾斜台に立ち,傾斜台の上で 傾斜刺激が繰り返される間,両脚立位を保持する. 刺激中は傾斜台を見ないように正面を向く.膝関 節運動制限4
種類をランダムに与えた. 表在感覚の影響を少なくするため,膝関節運動 制限を設けない場合にも膝関節装具を装着するよ うにした.また,試行毎に傾斜台前後回転軸と足 関節底背屈軸が一致するように立つ場所を調節し た.4
.解析方法 姿勢制御能の影響を強く受けるのは,傾斜刺激 に適応した状態より,適応する前である.また, 膝関節制限による股・足関節への影響を調べるた めには,変化の大きな適応前を調べるのが好まし い.これらの理由から,統計処理は刺激周期20
回中,刺激への適応期である最初の5
周期を使用 した(図2
).立位保持課題の4
条件における,右 耳孔,右肩峰,右第三中手骨頭の位置と,股関節, 膝関節,足関節の角度の最大値と最小値の差(以 下,運動角と示す)と,導出した6
筋の筋活動量 の傾向について,比較,検討した.SPSS 18.0
を用いて,反復測定一元配置分散分析を行い,主 効果が認められた場合,post
-hoc
test
(
Bonferroni
法)を行った.有意水準は5%
未満 とした. 図1
.実験風景 傾斜台に立ち,開眼,開脚立位を保持する.上図は傾斜台を前後 に傾斜させた図を示す.下図はマーカーと筋電図を身体に貼付し た状態で,実験開始位置に立っている状態を矢状面,前額面から 見た図を示す.図
2
.支持面前後回転刺激 周波数 0.75Hz,振幅 15°の支持面前後回転刺激と前脛骨筋の筋活 動量を示す.全 20 周期のうち,支持面前後回転刺激に適応するた めに必要な最初の 5 周期を解析に用いた.Ⅲ.結果
1
.身体動揺(図3
) 頭部,肩部,手部の前後動揺の差は,最初の数 周期で特に大きく変化した.頭部(p
=
0.16
),肩 部(p
=
0.67
),手部(p
=
0.69
)の動揺は,膝関 節条件により変化しなかった. 図3
.身体動揺 周波数 0.75Hz,振幅 15°の支持面前後回転刺激を与えた際の頭部, 肩部,手部の矢状面上での前後動揺の最初の 5 周期の平均値と標 準偏差を示した.青いグラフは膝伸展制限が無く,赤いグラフは 膝伸展制限を有するものである.身体前後動揺に,膝関節条件に よる差は認められなかった.2
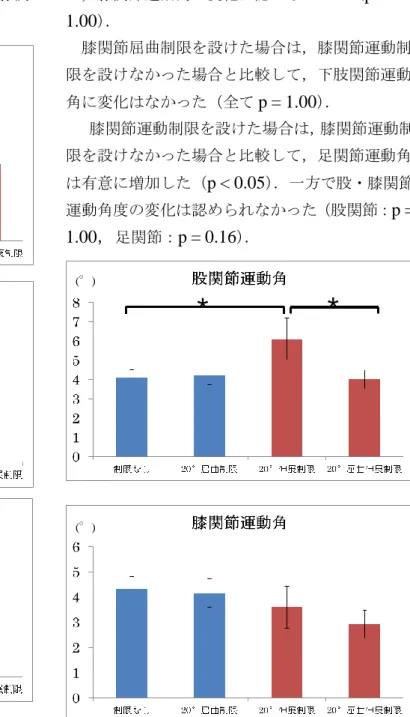
.下肢関節運動角(図4
) 膝関節伸展制限を設けた場合は,膝関節運動制 限を設けなかった場合と比較して,股・足関節運 動角は有意に増加した(それぞれp
<
0.05
).一方 で,膝関節運動角の変化は認めなかった(p
=
1.00
). 膝関節屈曲制限を設けた場合は,膝関節運動制 限を設けなかった場合と比較して,下肢関節運動 角に変化はなかった(全てp
=
1.00
). 膝関節運動制限を設けた場合は,膝関節運動制 限を設けなかった場合と比較して,足関節運動角 は有意に増加した(p
<
0.05
).一方で股・膝関節 運動角度の変化は認められなかった(股関節:p
=
1.00,
足関節:p
=
0.16
).*
(cm) (cm) (cm) (°) (°)*
図
4
.下肢関節運動角(°) 周波数 0.75Hz,振幅 15°の支持面前後回転刺激を与えた際の下肢 関節運動角の最初の 5 周期の平均値と標準偏差を示した.膝関節 伸展制限を設けた場合は,膝関節運動制限を設けなかった場合と 比較して,股・足関節運動角は有意に増加した.一方で,膝関節 運動角に差は認められなかった.また,膝関節屈曲制限を設けた 場合は,膝関節運動制限を設けなかった場合と比較して,下肢関 節運動角に変化はなかった.3
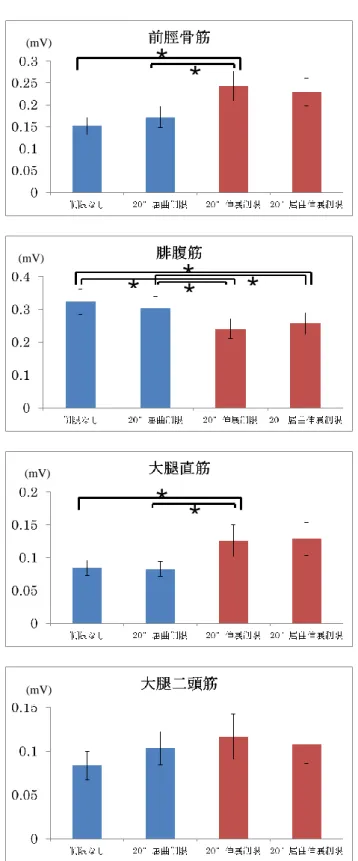
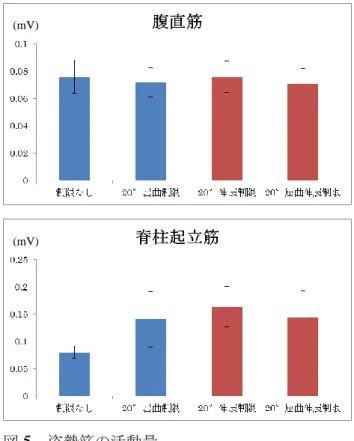
.筋活動(図5
) 膝関節伸展制限を設けた場合は,膝関節運動制 限を設けなかった場合と比較して,TA
,RF
は有 意に増加し(それぞれp
<
0.05
),GAS
は減少し た(p
<
0.05
).一方で,BF
,RA
,ES
の変化は 認めなかった(BF
:p
=
0.87
,RA
:p
=
0.48
,ES
:p
=
0.27
). 膝関節屈曲制限を設けた場合は,膝関節運動制 限を設けなかった場合と比較して,筋活動量に変 化は認めなかった(TA:p
=
0.89
,GAS
,RF
,BF
,RA
,ES:p
=
1.00
). 膝関節運動制限を設けた場合は,膝関節運動制 限を設けなかった場合と比較して,TA
は増加し ている傾向があり(p
<
0.1
),GAS
は減少した(p
<
0.05
).一方で,RF
,BF
,RA
,ES
に変化は認 めなかった(RF:p
=
0.16
,RA:p
=
0.46
,BF
,ES:p
=
1.00
).*
*
*
*
(°) (mV) (mV) (mV) (mV)*
*
*
*
*
*
図
5
.姿勢筋の活動量 周波数 0.75Hz,振幅 15°の支持面前後回転刺激を与えた際の姿勢 筋の筋活動量の最初の 5 周期の平均値と標準偏差を示した.膝関 節伸展制限を設けた場合は,膝関節運動制限を設けなかった場合 と比較して,TA,RF は有意に増加し,GAS は減少した.また, 膝関節屈曲制限を設けた場合は,膝関節運動制限を設けなかった 場合と比較して,筋活動量に変化はなかった.Ⅳ.考察
本研究は,膝関節の働きを明確にすること,股・ 足関節運動が膝関節運動をどのように補償するの かを明確にすることを目的として,膝関節運動を 制限したときの股・足関節運動の変化を調べた. 頭部,肩部,手部の矢状面における動揺におい て,膝関節の条件による差は認められなかった. また,膝関節運動角において,膝関節の条件によ る差は認められなかった.これらのことから,支 持面の前後傾斜刺激に対する頭部,肩部,手部の 位置の制御において,膝関節の働きは少なく,股・ 足関節が膝関節の働きを代償していると考えられ る. 膝関節運動制限を設けなかった場合と膝関節伸 展制限を設けた場合の下肢関節運動角と下肢筋活 動を比較したところ,股・足関節運動角は増加し,TA
,RF
の筋活動量は増加し,GAS
は減少した. 膝関節伸展制限により,股・足関節間の運動連鎖 が効果的に働かず,支持面から直接刺激を受ける 足関節の運動角が増加したと考えられる.Nashner
らは,弱い外乱に対してはankle
strategy
が優位に,それで対応できない大きな外乱に対し ては
hip
strategy
が優位に働くと報告している. 本実験では,ankle
strategy
のみでは対応しきれな かったため,hip
strategy
も働いた.そのため,股 関節運動角が増加したと考えられる.膝関節屈曲 角度が増加するにつれ,COP
は前方へ変位する5). 膝関節伸展制限を設けた場合,膝関節運動制限を 設けない場合と比較して,膝関節屈曲角度が大き いため,COP
は前方へ変位していると考えられる. 足関節底屈方向の傾斜時,COP
の前方への変位を 少なくするために,膝関節屈曲方向への運動を小 さくする姿勢制御が働く必要がある.この働きの 主な要因がRF
の活動量の増加と考えられる.ま た,膝関節屈曲方向への運動を小さくするために, 下腿を後傾させるのではなく,RF
の働きを阻害し ないために,二関節筋であるGAS
の活動量が減 少したと考えられる.一方,膝関節伸展制限を設 けた場合,膝関節は屈曲位になる.このとき,膝 関節運動制限を設けない場合と比較して,足関節 背屈角度は大きくなる.そのため,下腿腹側の骨・ 靱帯による支持機能の働きが低下する.この状態 で足関節背屈方向の傾斜刺激を受けると,立位を 保持するために下腿を前傾させなければならない. この働きにTA
の活動量の増加が寄与したと考え られる. 膝関節運動制限を設けなかった場合と膝関節屈 曲制限を設けた場合の下肢関節運動角と下肢筋活 動を比較したところ,下肢関節運動角,筋活動に おいて差は認められなかった.これらのことより, 膝関節屈曲制限は振幅15°
の傾斜刺激における姿 (mV) (mV)勢制御には影響を与えないと考えられる.
RA
およびES
において,膝関節条件により, 筋活動量に差は認められなかった.これは,膝関 節に制限が生じても体幹の筋への影響は小さいと 考えられる. これらの結果から,膝関節可動域制限がある場 合の転倒予防のひとつとしてTA
,RF
の筋活動量 の増加が考えられる.しかしながら,本実験は若 年健常者を対象とした研究であるため,臨床的応 用を考えるなら患者で同様のことを調べなければ ならない.謝辞
本稿を終えるにあたり,ご指導を頂きました本学 諸先生方,ならびに快く被験者を引き受けて下さ った皆様に深く感謝致します.引用文献
1) Masui
et
al
.:Increasing
postural
sway
in
rural
-community
-dwelling
elderly
persons
with
knee
osteoarthritis
.Journal
of
orthopaedic
science
11
:353
-358
,2006
2) Nagata
:Accidental
Falls
and
Social
Issues
.Equilibrium
Research
71
:110
-114
,2012
3) Ihara
: ロコモーティブシンドローム理解のための膝関節の構造と機能.